Механическое устройство для поддержания руки - RU166673U1
Код документа: RU166673U1
Чертежи
Описание
Полезная модель относится к области технических устройств для применения в медицинских целях, а именно, к механическому устройству для поддержания руки с пружинным механизмом, который компенсирует вес руки в положении «над столом» без опоры на локоть или предплечье и тем самым значительно снижает статические и динамические нагрузки на мышцы плечевого пояса и спины.
В связи с существенным старением населения, наблюдающимся в развитых странах и сопровождающимся ростом числа заболеваний с частичной или полной утратой подвижности рук, а также распространением нервно-мышечных и нейродегенеративных заболеваний задача разработки устройства, призванного компенсировать нарушение функции мышц рук, становится все более актуальной.
Известно динамическое устройство для поддержания руки Darwing компании FOCAL Meditech BV, предназначенное для людей с нарушенной функцией мышц рук и состоящее из плеча и предплечья, движения которых осуществляются независимо друг от друга, что обеспечивает более естественное выполнение двигательной функции рук (Darwing: The natural freedom of movement. Доступно по состоянию на 17.03.2016 в сети Интернет по ссылке http://www.darwing.nl/operation.html#keuze1. Опубликовано в 2012 г.) (далее - Д1). Конструкция устройства согласно Д1 такова, что дает возможность пользователю самостоятельно регулировать поддерживающую силу устройства в зависимости от выполняемых задач, необходимости удерживания или переноса тяжелых предметов и т.п., а наличие микропроцессора позволяет «запоминать» однажды установленные параметры поддерживающей силы для выполнения регулярно повторяемых действий, например, прием пищи, работу с клавиатурой и др.
Устройство согласно Д1 обладает рядом недостатков, поскольку оно достаточно громоздко, не является автономным и представляет собой не столько устройство для поддержания рук при нарушенной мышечной функции, сколько своего рода протез руки. Таким образом, известное устройство пригодно для использования лишь для очень ограниченной группы пациентов.
Известно динамическое устройство для поддержания руки Armon Edero (ARMON EDERO: User Manual. Доступно по состоянию на 17.03.2016 в сети Интернет по ссылке http://products2.armonportal.com/download/armon-edero-manual/.
Опубликовано 05.10.2015) (далее - Д2), предлагаемое в качестве ближайшего аналога заявляемой полезной модели. Использованная в Armon Edero пружинная стабилизирующая система позволяет компенсировать вес от 900 г до 4,8 кг.
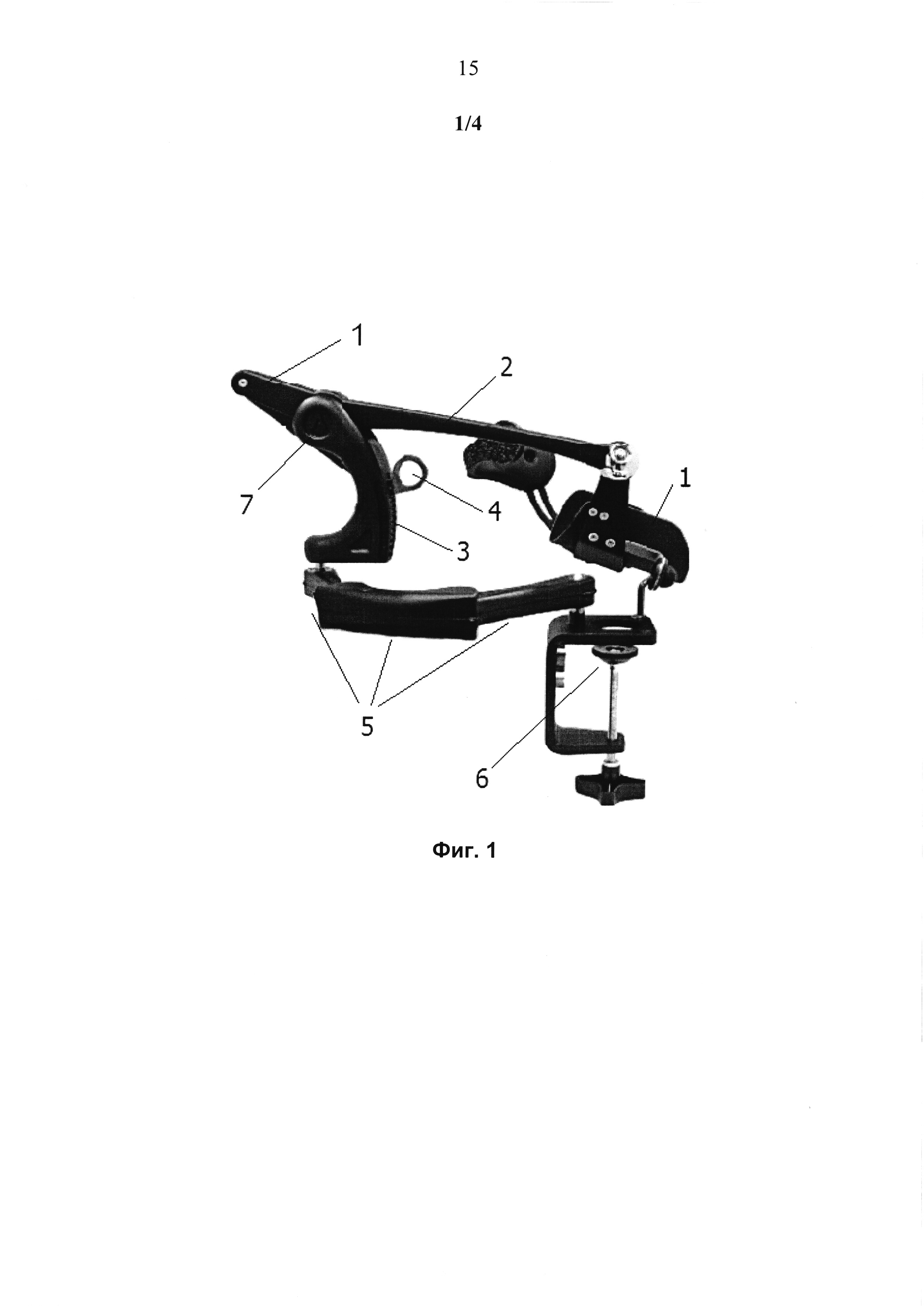
Устройство согласно Д2 состоит из ложемента (1), верхнего плеча рычага (2), основания (3), кольца с фиксатором (4), шарнирных соединений (5), зажимного крепления (6), позволяющего осуществлять крепление устройства к столешнице или другой горизонтальной поверхности, и пружины растяжения (7).
Ближайший аналог обладает рядом конструктивных недостатков и ограничений: использует рычаг первого рода, что увеличивает размеры рычага на длину плеча, а также использует пружину растяжения, подверженную существенным механическим нагрузкам и износу. Для регулировки силы противодействия весу руки в Armon Edero используется кольцо с фиксатором (4), которое требует значительного усилия растяжения пружины для установки в необходимое положение на регулировочной планке. Наконец, Armon Edero не позволяет регулировать нижнее положение ложемента руки относительно плоскости работы, что существенно ограничивает его функциональные возможности.
Вышеуказанные недостатки и ограничения прототипа преодолеваются в конструкции заявляемого устройства для поддержания руки.
Техническим результатом полезной модели является увеличение подвижности руки, поддерживаемой устройством.
Указанный технический результат достигается за счет того, что устройство для поддержания руки содержит ложемент для руки, штангу, дистальный конец которой шарнирно соединен с ложементом с обеспечением подвижности ложемента в вертикальной плоскости, кронштейн, шарнирно соединенный с проксимальным концом штанги с обеспечением подвижности штанги в вертикальной плоскости под действием веса руки, горизонтальную регулировочную планку, на которой закреплен кронштейн, газовую пружину сжатия, дистальный конец которой связан со штангой через передвижной шарнир, размещенный на штанге с возможностью перемещения вдоль нее и фиксации на ней, а проксимальный конец шарнирно связан с регулировочной планкой с возможностью перемещения вдоль нее и фиксации на ней, по меньшей мере одну дополнительную планку, шарнирно соединенную с регулировочной планкой с обеспечением ее подвижности в горизонтальной плоскости, причем дополнительная планка выполнена с возможностью связи с неподвижной опорой.
Предусмотрены следующие частные варианты осуществления заявленной полезной модели, а именно:
- ложемент для руки выполнен жестким, при этом устройство дополнительно содержит размещенный в нем мягкий ложемент;
- ложемент выполнен из акрила;
- мягкий ложемент выполнен из флокированного полистирола или поливинилхлорида;
- устройство содержит несколько дополнительных планок, связанных между собой посредством шарнирных соединений с обеспечением их подвижности в горизонтальной плоскости, а дальняя по отношению к регулировочной планке дополнительная планка выполнена с возможностью жесткого крепления к неподвижной опоре;
- штанга, регулировочная планка и дополнительные планки выполнены из алюминиевого сплава;
- номинальное усилие полного сжатия газовой пружины составляет 50-100 Н;
- в регулировочной планке выполнен продольный внутренний паз, а также ряд поперечных пазов, сообщающихся с продольным пазом, при этом устройство дополнительно содержит эксцентрик, связанный с проксимальным концом газовой пружины и размещенный в продольном пазу регулировочной планки с возможностью перемещения вдоль нее и фиксации на ней при вхождении стержня эксцентрика в поперечные пазы регулировочной планки;
- шарнирные соединения штанги с ложементом и кронштейном, газовой пружины с передвижным шарниром, а также дополнительных планок между собой выполнены неразъемными с использованием радиальных подшипников.
Далее полезная модель и принцип ее работы подробно объясняются ссылками на прилагаемые фигуры.
Фиг. 1 содержит фотографическое изображение устройства-прототипа.
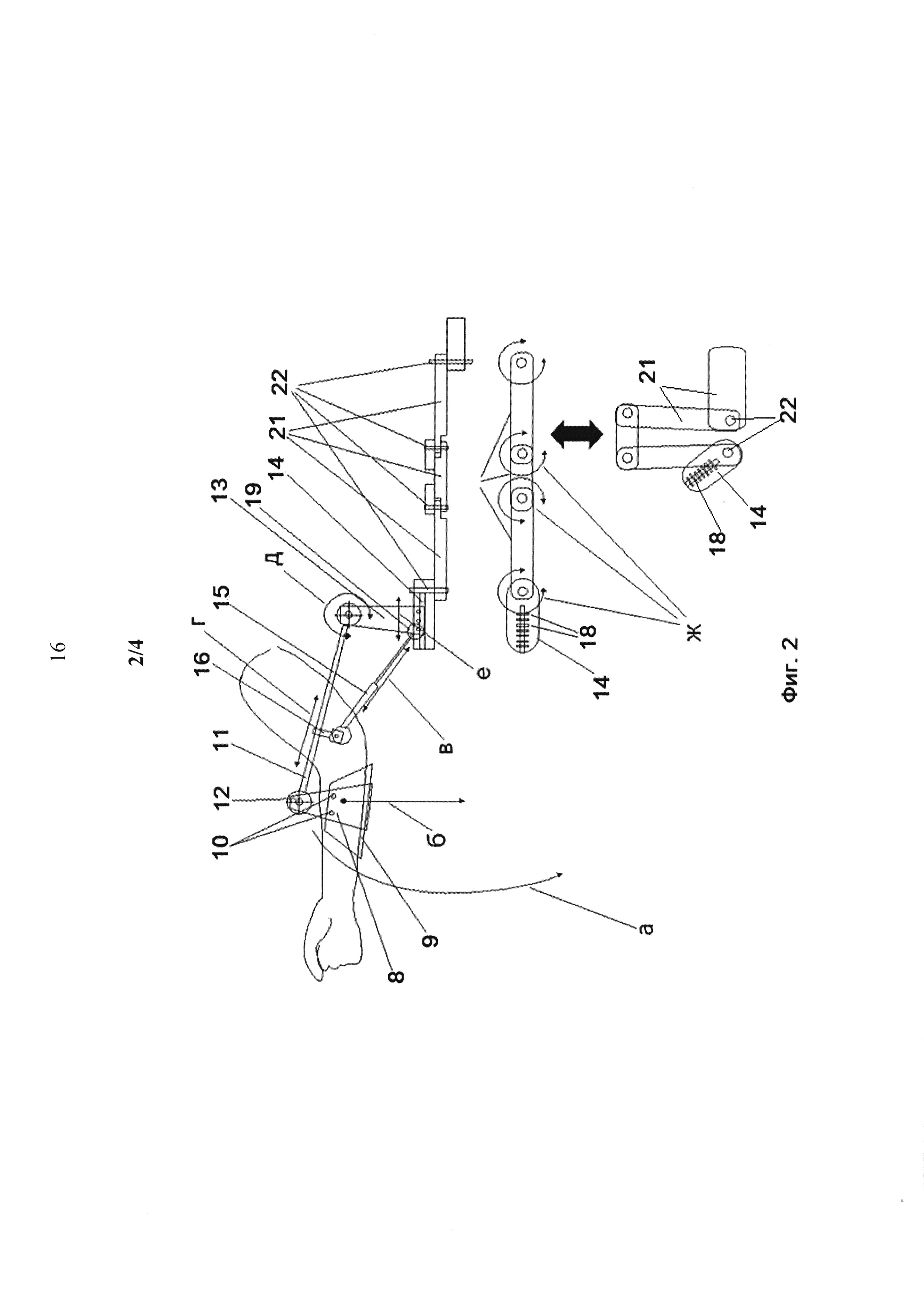
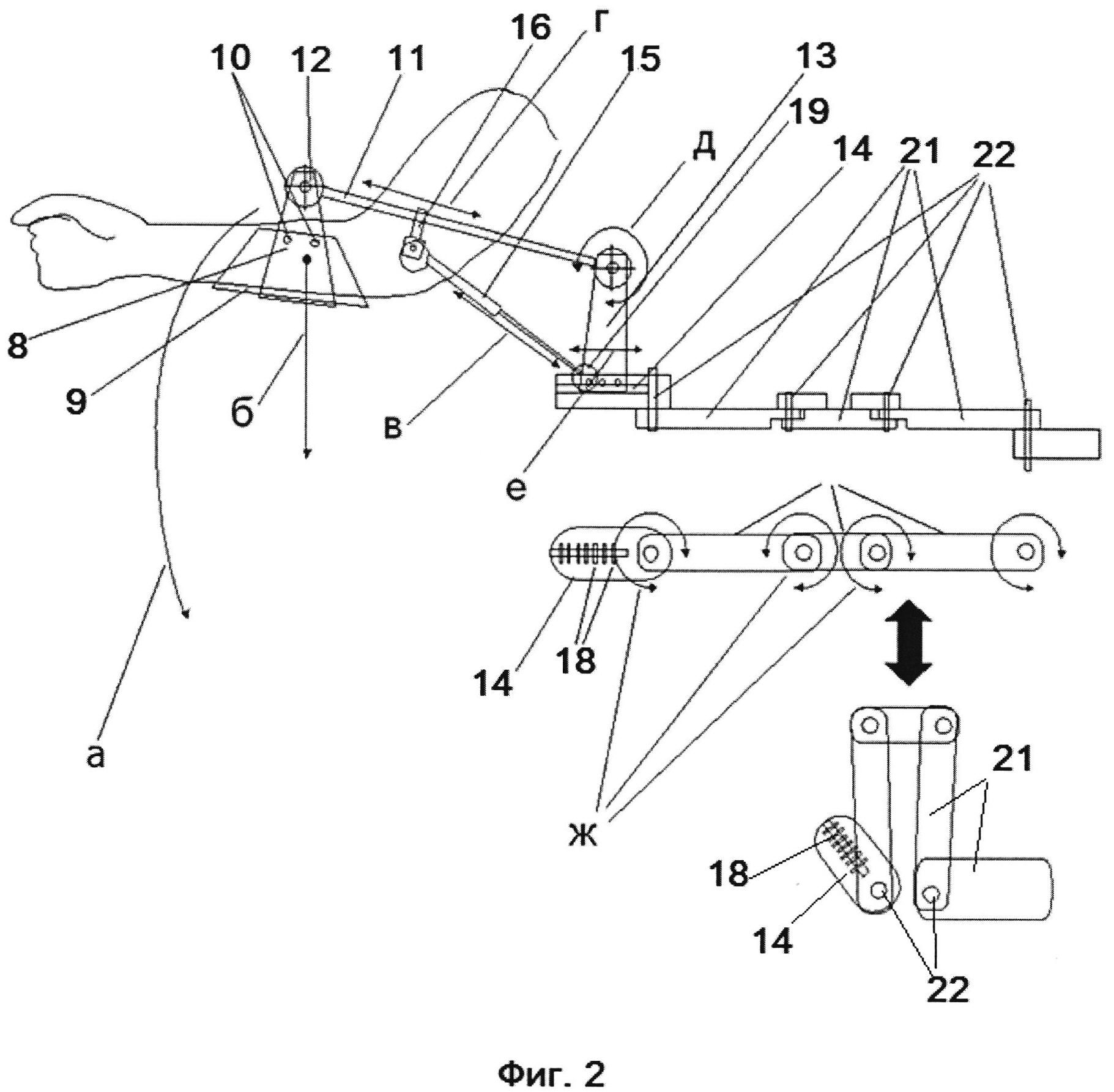
Фиг. 2 содержит схематическое изображение заявленного устройства в двух проекциях, включая общий вид устройства сбоку и вид планок сверху, с указанием основных видов выполняемых движений и сил (а)-(ж).
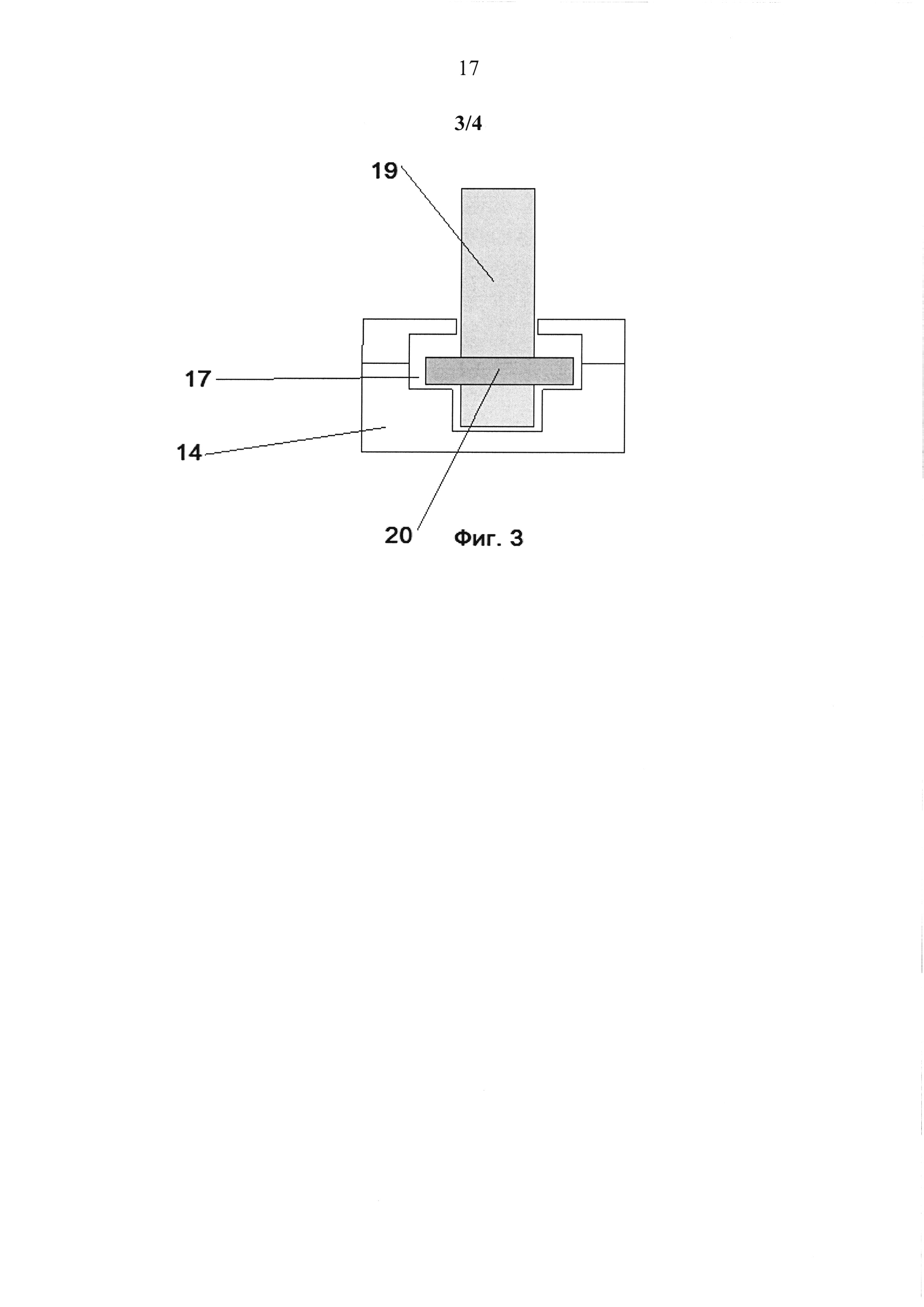
На фиг. 3 приводится конструкция регулировочной планки устройства.
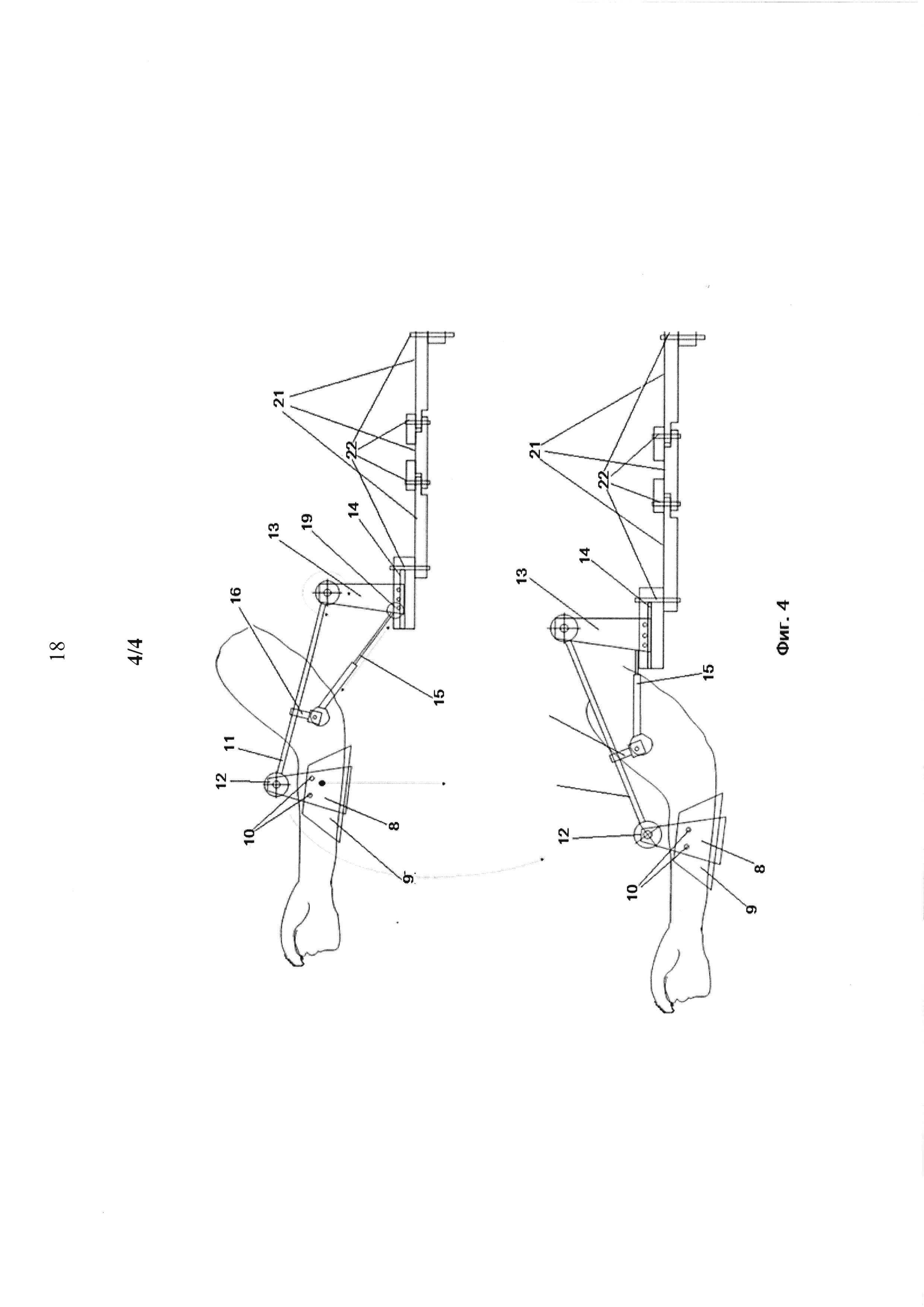
На фиг. 4 показана работа заявленного устройства при сгибании и разгибании руки.
На указанных фигурах введены следующие обозначения элементов.
Фиг. 1 (устройство по Д2):
1. Ложемент
2. Верхнее плечо рычага
3. Основание
4. Кольцо с фиксатором
5. Шарнирные соединения
6. Зажим (зажимное крепление)
7. Пружина растяжения
Фиг. 2-4 (заявленное устройство):
8. Жесткий ложемент
9. Мягкий ложемент
10. Соединительные элементы мягкого ложемента
11. Штанга
12. Шарнир ложемента
13. Кронштейн
14. Регулировочная планка
15. Газовая пружина сжатия
16. Передвижной шарнир
17. Продольный паз регулировочной планки
18. Поперечные пазы регулировочной планки
19. Эксцентрик
20. Стержень эксцентрика
21. Дополнительные планки
22. Шарнирные соединения планок
На фиг. 2-4 также обозначены следующие движения и действующие силы:
а. Перемещения руки в ложементе
б. Вес руки
в. Компенсирующее движение штока пружины
г. Регулировка длины рычага
д. Качение штанги в вертикальной плоскости
е. Установочное перемещение эксцентрика для регулировки высоты положения руки при полностью сжатой пружине
ж. Вращение дополнительных планок в горизонтальных шарнирах для регулировки вылета поддерживающей части устройства.
Заявленное устройство содержит ложемент (8) для размещения руки, предпочтительно выполненный в виде жесткого ложемента. В жестком ложементе (8) может дополнительно размещаться мягкий ложемент (9), закрепленный соединительными элементами (10).
Устройство также имеет штангу (11), первый (дистальный по отношению к положению руки) конец которой соединен с ложементом (8) посредством шарнира (12), который обеспечивает подвижность ложемента (8) относительно штанги (11) в вертикальной плоскости. Второй (проксимальный) конец штанги (11) шарнирно соединен с кронштейном (13) в его верхней части.
Кронштейн (13) может быть выполнен в виде вертикальной стойки, сужающейся в направлении верхнего ее конца. Кронштейн (13) жестко закреплен на горизонтальной регулировочной планке (14).
Для обеспечения противодействию весу руки в устройстве предусмотрена газовая пружина сжатия (15) с номинальным усилием полного сжатия, предпочтительно, 50-100 Н.
Первый (дистальный по отношению к положению руки) конец газовой пружины (15) связан со штангой (11) с помощью передвижного шарнира (16), который может перемещаться вдоль штанги (11) и фиксироваться на ней в различных положениях, например, посредством стопорного винта.
Второй (проксимальный) конец газовой пружины (15) шарнирно связан с регулировочной планкой (14). При этом проксимальный конец имеет возможность перемещения вдоль регулировочной планки и фиксации на ней в различных положениях. Указанная возможность может быть конструктивно реализована за счет наличия в регулировочной планке (14) внутреннего продольного Т-образного паза (17) (см. фиг. 3) и ряда поперечных пазов (18) (см. фиг. 2), сообщающихся с продольным пазом (17), а также использования эксцентрика (19), связанного с проксимальным концом пружины (15). Эксцентрик (15) размещается в продольном пазу регулировочной планки и имеет возможность перемещения в нем. При этом фиксация эксцентрика в определенном положении может осуществляться при вхождении стержня (вала) (20) эксцентрика (19) в поперечные пазы (18) регулировочной планки.
Шарнирные соединения концов пружины (15) со штангой (11) и регулировочной планкой (через эксцентрик 19) обеспечивают качательное перемещение пружины в вертикальной плоскости.
Для обеспечения подвижности руки в горизонтальной плоскости, в том числе регулировки ее вылета относительно опоры, в устройстве предусмотрена одна или несколько дополнительных планок (21), шарнирно связанных с регулировочной планкой (14). При наличии нескольких регулировочных планок (21) они соединены шарнирами (22) для обеспечения взаимной подвижности в горизонтальной плоскости. При этом самая дальняя (дистальная) по отношению к регулировочной планке (21) дополнительная планка жестко крепится к неподвижной опоре. Указанное закрепление может осуществляться посредством различных средств, известных специалисту, например, посредством зажимного узла.
Жесткий ложемент (8) может быть выполнен из акрила, а мягкий (9) - из флокированного полистирола или поливинилхлорида. Штангу (11), регулировочную планку (14) и дополнительные планки (21) предпочтительно выполняют из алюминиевого сплава. В качестве шарнирных соединений (22) могут быть использованы неразъемные соединения с радиальными подшипниками.
Устройство работает следующим образом.
Перед началом использования устройство закрепляется на неподвижной опоре. При этом осуществляется первоначальная регулировка устройства индивидуально под каждого пользователя, которая включает:
- регулировку длины рычага (усилия пружины) в зависимости от веса руки пользователя путем изменения положения передвижного шарнира (16) относительно штанги (11) (движение (г));
- регулировку нижнего положения ложемента руки относительно плоскости работы путем изменения положения проксимального конца пружины относительно регулировочной планки при перемещении (е) эксцентрика (19) в продольном пазу (17).
При работе устройства пользователь размещает предплечье в ложементе (8). Реализуя правило рычага второго рода, газовая пружина (15) противодействует приложенной силе (б), создаваемой весом руки, т.е. разжимается, создавая усилие в обратном направлении (движение (в)).
При этом за счет первоначальных регулировок при определенном весе руки, известной силе пружины и точке приложения силы достигается равновесие сил, при котором на удержание руки «на весу» не тратится никаких усилий.
В процессе работы пользователь может изменять положение руки по высоте в пределах установленных регулировок (см. фиг. 4) за счет качательного перемещения ложемента (а) и штанги (д) в вертикальной плоскости. Кроме того, пользователь имеет возможность горизонтального перемещения руки за счет подвижности (ж) дополнительных планок.
Таким образом, конструкция устройства обеспечивает повышенную подвижность руки при сохранении по существу постоянного усилия противодействия ее весу.
Могут быть предусмотрены следующие варианты конструкции устройства:
- различные типоразмеры ложементов (8, 9) - от размеров детской руки до размеров руки взрослого мужчины;
- газовые пружины (15) с различным усилием, например, 50 Н, 80 Н, 100 Н.
Различные виды опор в зависимости от условий эксплуатации: настольная, напольная, стационарная или подвижная. Опора может также закрепляться на подлокотниках или спинках рабочего кресла или инвалидной коляски. Предусмотрены варианты потолочного и настенного монтажа для специально оборудованных рабочих мест.
Заявленное устройство имеет ряд существенных отличий от ближайшего аналога согласно Д2.
Заявленное устройство использует рычаг второго рода вместо рычага первого рода, используемого в аналоге, что позволяет уменьшить габариты устройства.
Предлагаемое устройство использует газовую пружину сжатия вместо пружины растяжения (2), используемой в аналоге. Газовая пружина, в отличие от пружины растяжения, не имеет свойств усадки и ослабевания в процессе эксплуатации и отличается большей надежностью, доступностью и долговечностью.
Для регулировки силы противодействия весу руки в аналогичном изделии используется кольцо с фиксатором (1), которое требует значительного усилия растяжения пружины для установки в необходимое положение на регулировочной планке. В предлагаемой полезной модели такого усилия не требуется.
Предлагаемое устройство позволяет регулировать нижнее положение ложемента руки относительно плоскости работы путем установки эксцентрика (13) на регулировочной планке (7). В ближайшем аналоге данная функция отсутствует.
Устройство имеет две широкие категории применения:
1) лечение, реабилитация и создание более качественных условий жизни у людей с ограниченными возможностями, больных, травмированных, реконвалесцентов: амиотрофический склероз, ревматизм и ревматоидный артрит, рассеянный склероз, спинальные мышечные атрофии, прочие мышечные заболевания, связанные с атрофией мышц, снижениями тонуса и силы мышц, посттравматические состояния и болевые синдромы, болевые синдромы шеи, плечевого пояса, плеча и прочее, состояния после мастэктомии и операций на молочных железах и прочее;
2) обеспечение комфортных условий работы для широкого круга профессий, где большую часть времени человек работает руками сидя или стоя, где зачастую нет возможности опереться на локти или предплечья в процессе работы, включая стоматологов, хирургов и микрохирургов, лаборантов, представителей некоторых рабочих профессий, а также художников и пр.
Испытания опытного образца устройства показали, что оно полностью соответствует своему функциональному назначению и успешно работает.
Реферат
1. Механическое устройство для поддержания руки, содержащее:ложемент (8) для руки,штангу (11), дистальный конец которой шарнирно соединен с ложементом (8) с обеспечением подвижности ложемента (8) в вертикальной плоскости,кронштейн (13), шарнирно соединенный с проксимальным концом штанги (11) с обеспечением подвижности штанги (11) в вертикальной плоскости под действием веса руки,горизонтальную регулировочную планку (14), на которой закреплен кронштейн (13),газовую пружину сжатия (15), дистальный конец которой связан со штангой (11) через передвижной шарнир (16), размещенный на штанге (11) с возможностью перемещения вдоль нее и фиксации на ней, а проксимальный конец шарнирно связан с регулировочной планкой (14) с возможностью перемещения вдоль нее и фиксации на ней, идополнительную планку (21), шарнирно соединенную с регулировочной планкой (14) с обеспечением ее подвижности в горизонтальной плоскости, причем дополнительная планка (21) выполнена с возможностью связи с неподвижной опорой.2. Устройство по п. 1, отличающееся тем, что ложемент (8) для руки выполнен жестким, при этом устройство дополнительно содержит размещенный в ложементе (8) мягкий ложемент (9).3. Устройство по п. 1, отличающееся тем, что штанга (11), регулировочная планка (14) и дополнительная планка (21) выполнены из алюминиевого сплава.4. Устройство по п. 1, отличающееся тем, что номинальное усилие полного сжатия газовой пружины (15) составляет 50-100 Н.5. Устройство по п. 1, отличающееся тем, что в регулировочной планке (14) выполнен продольный внутренний паз (17), а также ряд поперечных пазов (18), сообщающихся с продольным пазом (17), при этом устройство дополнительно содержит эксцентрик (19), связанный с проксимальным концом газовой пружины (15) и размещенный в продольном пазу (17)
Формула
Комментарии