Грейферный подающий механизм к многопозиционному прессу - SU535888A3
Код документа: SU535888A3
Чертежи
Описание
дельных участков, образующих ступенчатые поверхности.
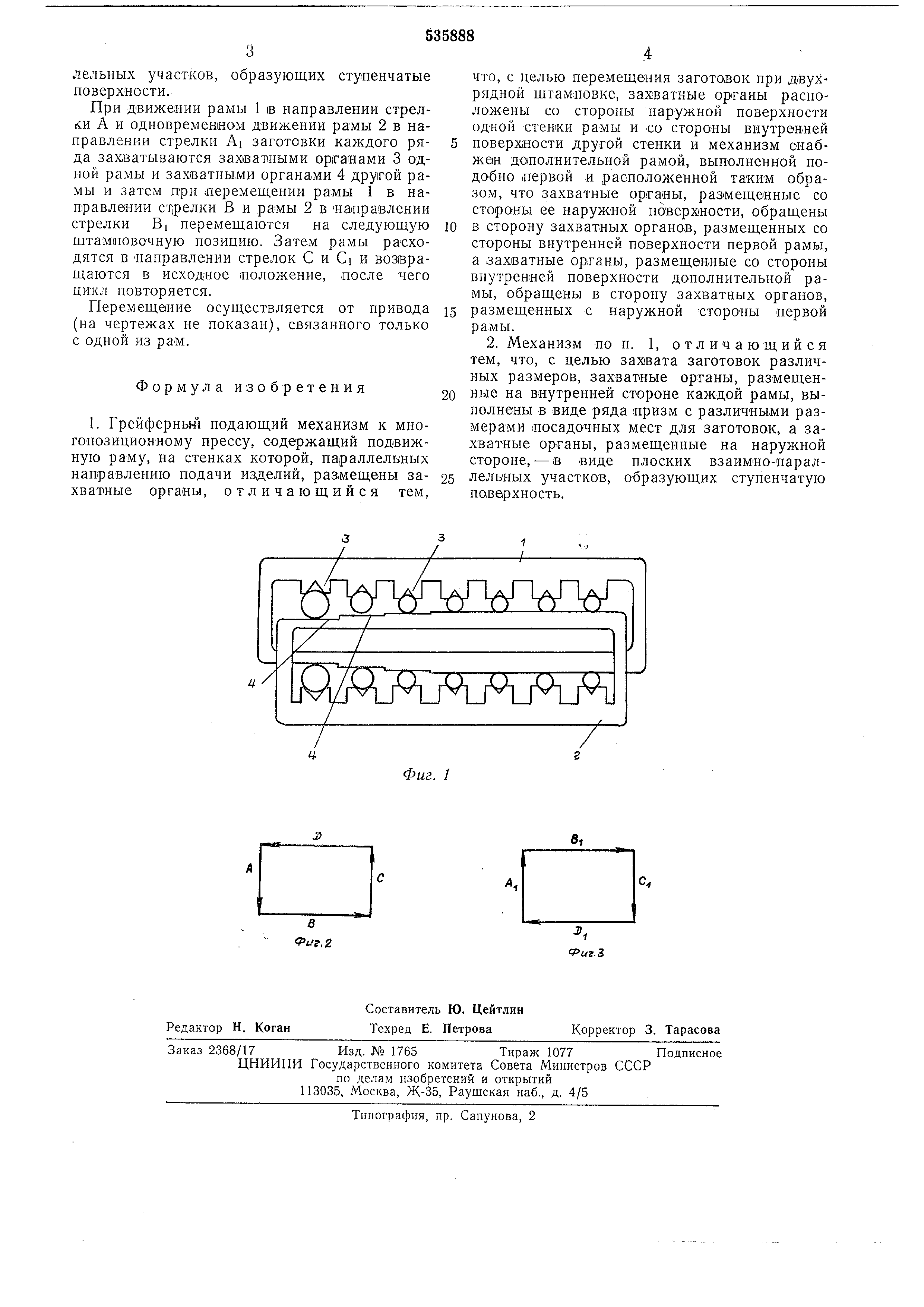
При движении рамы 1 в направлении стрелки А и одновремевнОМ движении рамы 2 в направлении стрелки AI заготовки каждого ряда зах,ватываются зах1ват1ными органами 3 одной рамы и зах1ватны,мн органами 4 другой рамы и затем при перемещении рамы 1 в направлении сТ|релки В и рамы 2 в направлении стрелки BI перемещаются на следующую штамповочную позицию. Затем рамы расходятся в -направлении стрелок С и Ci и Bosiapaщаются в исходное положение, после чего цикл повторяется.
Перемещение осуществляется от привода (на чертежах не показан), связанного только с одной из рам.
Формула изобретения
1. Грейферньш подающий механизм к многолозиционному прессу, содержащий подвижную раму, на стенках которой, параллельных направлению подачи изделий, размещены захватные орга«ы, отличающийся тем.
что, с целью перемещения заготовок при двухрядной щтамяовке, захватные органы расположены со стороны наружной поверхности одной стенки и со стороиы внутренней
поверхности другой стенки и механизм снабжен дополнительной рамой, выполненной нодобно первой и расположенной таким образом , что захватные органы, размещенные со стороны ее наружной поверхности, обращены
в сторону захватных органов, размещенных со стороны внутренней поверхности первой рамы, а захватные органы, размещенные со стороны внутренней поверхности дополнительной рамы , обращены в сторону захватных органов,
размещенных с наружной стороны первой рамы.
2. Механизм по п. 1, отличающийся тем, что, с целью захвата заготовок различных размеров, захватные органы, размещенные на внутренней стороне каждой рамы, выполнены в виде ряда призм с различными размерами посадочных мест для заготовок, а захватные органы, размещенные на наружной стороне, - в виде плоских взаимно-параллельных участков, образующих ступенчатую поверхность.

Реферат
Формула
Комментарии