Способ управления процессом перевалки - RU2683040C2
Код документа: RU2683040C2
Чертежи

Описание
Область техники
Предлагаемое изобретение относится к способу управления процессом перевалки согласно ограничительной части пункта 1 формулы изобретения и к самоходной уборочной машине согласно ограничительной части пункта 14 формулы.
Уровень техники
Способ управления процессом перевалки во время выполнения уборочного процесса и самоходная уборочная машина такого типа известны из патентного документа WO 2013/096593 A1. В этом документе раскрыт зерноуборочный комбайн с перевалочным устройством и управляющим устройством, предназначенным для получения и анализа управляющих сигналов от сопровождающего транспортного средства. Результаты анализа внешнего управляющего сигнала влияют на режим работы перевалочного устройства зерноуборочного комбайна. Если во время процесса перевалки с зерноуборочного комбайна на сопровождающее транспортное средство на траектории движения сопровождающего транспортного средства обнаруживается препятствие, сопровождающее транспортное средство совершает маневр уклонения. Маневр уклонения приводит к прерыванию процесса перевалки на основании поданного сопровождающим транспортным средством сигнала, что позволяет избежать потерь урожая. Управление процессом перевалки постоянно осуществляется в зависимости от внешнего управляющего сигнала, отражающего только рабочее состояние сопровождающего транспортного средства.
Кроме того, из уровня техники известно ручное управление процессом перевалки, то есть, включение и отключение перевалочного устройства, во время выполнения процесса уборки, осуществляемое оператором уборочной машины. В случае возникновения критической рабочей ситуации во время процесса перевалки, информация о которой доводится до оператора, по существу, путем вывода предупреждения или сообщения об ошибке на устройство отображения уборочной машины, оператору приходится заниматься, по существу, устранением этой критической рабочей ситуации и при этом, по меньшей мере, кратковременно отвлекаться от выполняемого процесса перевалки. В результате, как правило, происходят потери урожая. Процесс перевалки требует дополнительной мощности привода, которая должна быть предоставлена уборочной машиной. Соответственно, уменьшается приводная мощность, доступная остальным рабочим агрегатам уборочной машины во время осуществления процесса перевалки. В случае перегрузки одного из рабочих агрегатов значительно снижается скорость движения вперед. Вследствие этого происходит рассогласование скорости движения сопровождающего транспортного средства и уборочной машины, что, в свою очередь, приводит к потерям при перевалке, так как оператор сопровождающего транспортного средства не может мгновенно отреагировать на изменение скорости движения уборочной машины.
Раскрытие изобретения
Задачей настоящего изобретения является разработка способа управления процессом перевалки, осуществляемого во время уборочного процесса, и уборочной машины, сводящей к минимуму потери урожая при перевалке в случае возникновения критических рабочих состояний уборочной машины.
Эта задача решена способом с признаками, раскрываемыми в пункте 1 формулы изобретения, и уборочной машиной с признаками, раскрываемыми в пункте 14 формулы.
Выгодные варианты исполнения изобретения раскрыты в зависимых пунктах формулы.
Согласно пункту 1, во время процесса перевалки управляющее устройство контролирует рабочее состояние уборочной машины и при обнаружении критической рабочей ситуации автоматически инициирует отключение перевалочного устройства. При возникновении критической рабочей ситуации оператору не требуется оценивать и затем устранять эту ситуацию одновременно с контролем над осуществляемым процессом перевалки. Кроме того, при отключении перевалочного устройства автоматически высвобождается приводная мощность.
Выгодным образом, высвободившаяся при прерывании перевалочного процесса приводная мощность может быть направлена управляющим устройством, по меньшей мере, на один рабочий агрегат.
При этом направление высвободившейся приводной мощности можно выбирать в зависимости от рабочего агрегата, подавшего сигнал о перегрузке. Целенаправленное назначение приводной мощности, высвободившейся в результате отключения перевалочного устройства, рабочему агрегату, подавшему сигнал о перегрузке на управляющее устройство, позволяет смягчить или устранить состояние перегрузки.
В частности, по системе шин на управляющее устройство может быть передан, по меньшей мере, один сигнал, отражающий рабочее состояние и анализируемый управляющим устройством с целью распознавания рабочего состояния.
Кроме того, предусмотренный на уборочной машине оптический датчик позволяет обнаруживать препятствия перед уборочной машиной и/или транспортным средством. Оптический датчик передает на управляющее устройство данные, служащие для распознавания ситуации при движении. Оптический датчик выполнен с возможностью распознавания препятствий, находящихся на пути движения уборочной машины и/или транспортного средства. Управляющее устройство выполнено с возможностью анализа данных, предоставляемых оптическим датчиком. В случае распознавания препятствия на пути движения перевалочное устройство активизируется соответствующим образом в зависимости от возможности выполнения равномерного маневра уклонения уборочной машиной и транспортным средством. Если равномерный маневр уклонения, то есть, по существу, параллельное движение, не может быть осуществлен уборочной машиной и транспортным средством, процесс перевалки прерывается.
Кроме того, датчик на перевалочном устройстве может определять готовность транспортного средства к перевалке и передавать эту информацию в виде сигнала готовности на управляющее устройство. Готовность транспортного средства характеризуется наличием транспортного средства и/или уровнем наполнения транспортного средства и/или распознаванием расстояния между уборочной машиной и транспортным средством, необходимого для перевалки без потерь.
Кроме того, датчик на перевалочном устройстве может распознавать готовность зерноуборочного комбайна к перевалке и передавать эту информацию в виде сигнала готовности на управляющее устройство. Предпочтительно, датчик выполнен в виде камеры. Датчик распознает поток культуры из перевалочного устройства оптическим путем. При обнаружении отсутствия потока культуры можно сделать вывод о том, что резервуар уборочной машины пуст.
Кроме того, датчик позволяет распознавать снижение потока культуры из перевалочного устройства ниже задаваемого порогового значения. Эта ситуация может возникнуть в том случае, если во время обмолота выполняется перевалка на транспортное средство. Как только резервуар уборочной машины будет опорожнен, поток культуры из перевалочного устройства значительно ослабнет. Такое изменение выходящего потока культуры может быть распознано датчиком. Управляющее устройство анализирует соответствующий сигнал и передает на перевалочное устройство сигнал, инициирующий автоматическое завершение процесса перевалки.
При этом в зависимости от сигнала готовности перевалочное устройство может автоматически включаться или выключаться. Соответственно, например, после неравномерного маневра уклонения уборочной машины и транспортного средства вследствие обнаружения препятствия на пути следования можно снова запустить процесс перевалки, когда готовность транспортного средства к перевалке будет распознана и передана в виде сигнала готовности на управляющее устройство. Управляющее устройство активизирует перевалочное устройство соответствующим образом, чтобы продолжить процесс перевалки.
Предпочтительно, при помощи датчика частоты вращения можно распознавать снижение частоты вращения привода рабочего агрегата, отделяющего убранную культуру, и передавать эту информацию в виде сигнала частоты вращения на управляющее устройство. Распознавание снижения частоты вращения привода позволяет судить о перегрузке двигателя внутреннего сгорания, служащего приводом рабочих агрегатов.
Кроме того, можно распознавать появление проскальзывания рабочего агрегата и передавать эту информацию в виде сигнала проскальзывания на управляющее устройство. Возникновение проскальзывания при приведении рабочих агрегатов равнозначно обнаружению перегрузки при эксплуатации двигателя внутреннего сгорания, служащего приводом рабочих агрегатов.
В частности, датчики могут распознавать движение системы рулевого управления и передавать эту информацию в виде сигнала рулевого управления на управляющее устройство. На основании величины управляющего сигнала управляющее устройство может определить, приведет ли итоговое управляющее движение к критической рабочей ситуации, нарушающей процесс перевалки.
Кроме того, можно измерять значение ускорения уборочной машины и передавать его в виде сигнала ускорения на управляющее устройство. Одностороннее ускорение уборочной машины, инициированное оператором уборочной машины, может привести к смещению уборочной машины в пространстве относительно транспортного средства, в результате чего безопасная перевалка не может быть гарантирована.
Предпочтительно, на управляющее устройство можно передавать сигнал качества, отражающий качество процесса обработки, выполняемого рабочим агрегатом. Под сигналом качества может пониматься, например, сигнал, отражающий качество процесса обмолота и анализируемый управляющим устройством. Если на основании сигнала качества будет обнаружено, что качество обмолота во время процесса перевалки не может быть выдержано, то процесс перевалки будет прерван, чтобы увеличить приводную мощность, доступную для процесса обмолота. То же самое может быть справедливо для процесса сепарации или очистки.
Согласно независимому пункту 14 формулы, поставленная задача решена самоходной уборочной машиной с управляющим устройством, выполненным с возможностью управления осуществляемым во время процесса уборки процессом перевалки, во время которого перевалочное устройство уборочной машины, содержащей несколько рабочих агрегатов, передает убранную культуру на транспортное средство, причем управляющее устройство выполнено с возможностью осуществления контроля за рабочим состоянием уборочной машины во время процесса перевалки и с возможностью автоматической инициации отключения перевалочного устройства при распознавании критической рабочей ситуации.
Предпочтительно, самоходная уборочная машина может быть выполнена в виде зерноуборочного комбайна.
Краткое описание чертежей
Детальные пояснения к предлагаемому изобретению даются на основании варианта исполнения, представленного на фигурах, на которых изображено:
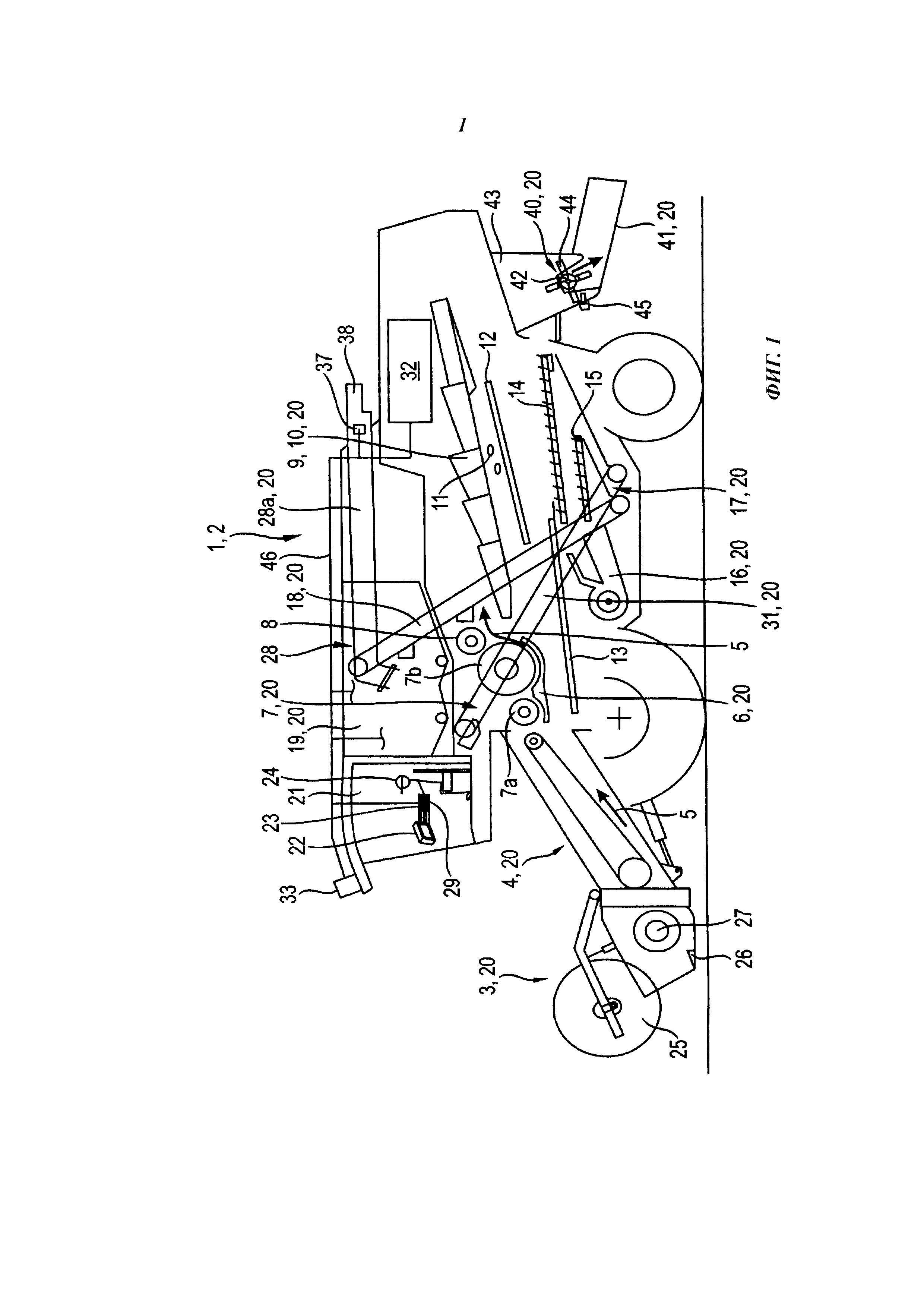
Фигура 1: схематичный вид сбоку сельскохозяйственной уборочной машины.
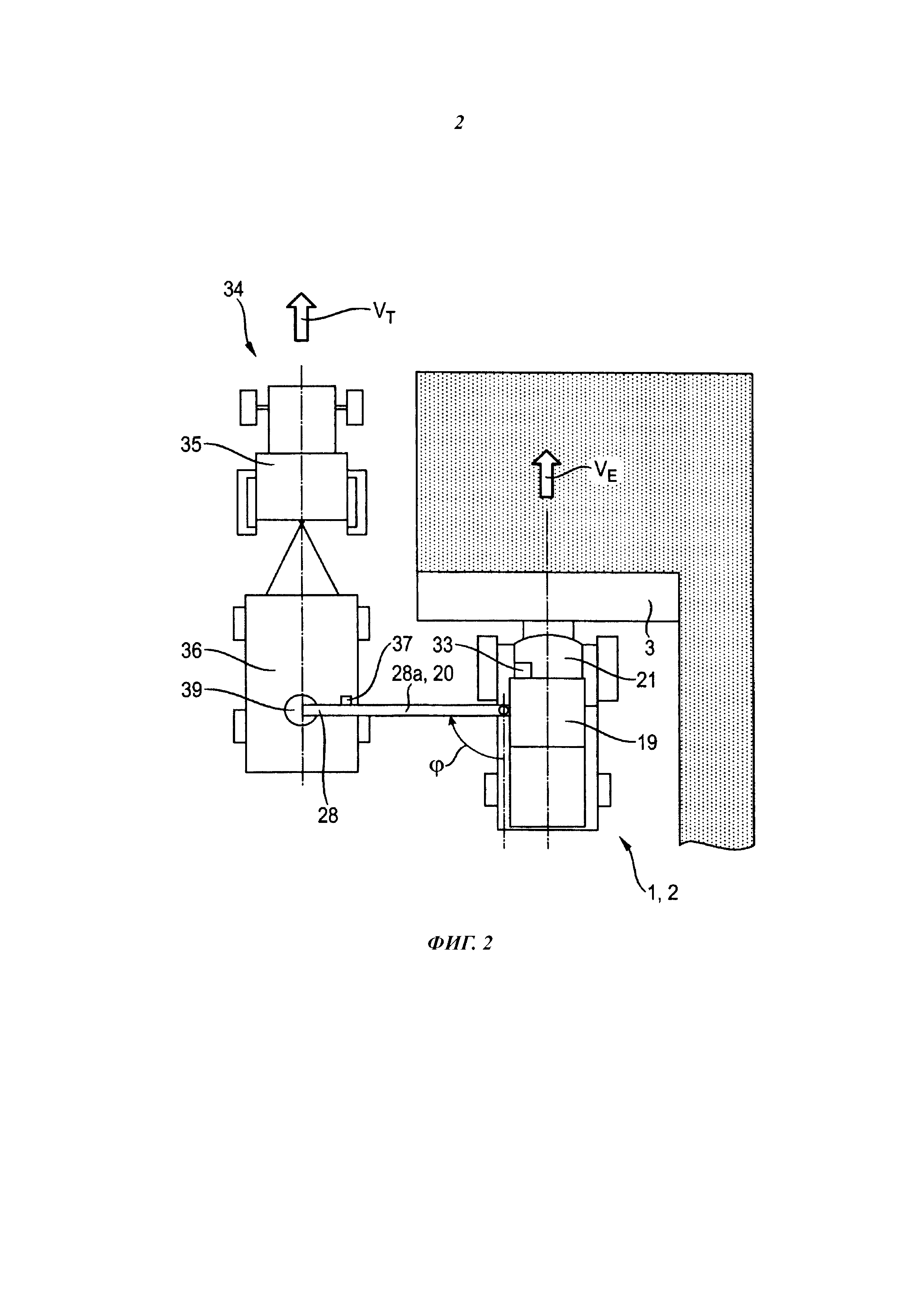
Фигура 2: схематичный план сельскохозяйственной уборочной машины и сопровождающего ее транспортного средства во время процесса перевалки.
Фигура 3: блок-схема, иллюстрирующая управление и контроль процесса перевалки.
Осуществление изобретения
В передней части сельскохозяйственной уборочной машины 1, схематично изображенной на фигуре 1 и выполненной в виде зерноуборочного комбайна 2, находится навесной агрегат, в частности, жатка 3, известным образом соединенная с наклонным транспортером 4 зерноуборочного комбайна 2. Поток убранной культуры, проходящий через наклонный транспортер 4 и обозначенный стрелкой 5, передается в верхней задней части наклонного транспортера 4 на молотильные агрегаты 7 зерноуборочного комбайна 2, по меньшей мере, частично окруженные в нижней части так называемой декой 6 молотильного барабана. Молотильные агрегаты 7 содержат барабан 7а предварительного ускорения и молотильный барабан 7b. Подающий барабан 8, расположенный за молотильными агрегатами 7, отклоняет поток 5 убранной культуры, выходящий из задней области молотильных агрегатов 7, таким образом, чтобы он непосредственно поступал на сепарирующее устройство 10, выполненное в виде клавишного соломотряса 9. На колеблющемся клавишном соломотрясе 9 поток 5 убранной культуры направляют таким образом, чтобы свободные зерна 11, содержащиеся в потоке 5 убранной культуры, отделялись в нижней части клавишного соломотряса 9. Разделительное устройство 10 может быть также выполнено в виде, по меньшей мере, одного осевого сепарирующего ротора.
Зерна 11, отделенные на деке 6 молотильного барабана и клавишном соломотрясе 9, направляются через возвратную пластину 12 и подающую пластину 13 очищающего устройства 17, состоящего из нескольких уровней 14, 15 фильтрации и воздуходувного устройства 16. Затем очищенный поток зерен поступает через элеватор 18 в резервуар, выполненный в виде бункера 19 для зерна. Убранная культура, содержащаяся в бункере 19 для зерна, передается посредством устройства 28 для опорожнения бункера для зерна, содержащего выпускную трубу 28а бункера для зерна и приводное устройство, на транспортное средство 34, сопровождающее зерноуборочный комбайн 2, как показано на фигуре 2. На свободном конце 38 выпускной трубы 28а бункера для зерна находится датчик 37.
Уровни 14, 15 фильтрации расположены частично друг над другом, благодаря чему убранная культура фильтруется с двумя различными степенями тонкости, причем величину ячеи на уровнях 14, 15 фильтрации можно изменять. Изменение размера ячеи и/или частоты вращения воздуходувного устройства 16 позволяет влиять на количество и состав убранной культуры, проходящей через отверстия сетки, так называемого просева, и количество продукта, транспортируемого через уровни 14, 15 фильтрации, так называемого отсева. Кроме того, верхний уровень 14 фильтрации, как правило, выполнен таким образом, чтобы в его задней части, в так называемой области мякины, размер ячеи увеличивался. Просев, проходящий в области мякины через верхний уровень 14 фильтрации, и отсев в конце нижнего уровня 15 фильтрации, содержат, как правило, более тяжелые частицы, то есть, не обмолоченные колосья. Далее просев вместе с отсевом называют мякиной. Мякина попадает на наклонную приемную пластину 30 ниже очищающего устройства 17 и соскальзывает на шнек подачи колосьев. Шнек подачи колосьев передает мякину на элеватор 31 для мякины, который транспортирует ее обратно на молотильные агрегаты 7.
Солома транспортируется через клавишный соломотряс 9 в заднюю часть зерноуборочного комбайна, где она поступает на измельчающее устройство 40 и связанное с ним разбрасывающее устройство 41. Измельчающее устройство 40 содержит, в том числе, вращающийся измельчающий барабан 42, помещенный в корпус 43 измельчителя. Измельчающий барабан 42 снабжен подвижными ножами 44, входящими в зацепление с противорежущими пластинами 45, неподвижно закрепленными в корпусе 43 измельчителя. Эти ножи 44 и противорежущие пластины 45 измельчают солому и ускоряют поток измельченной соломы. Выходящий из измельчающего устройства 40 поток материала, состоящий, по существу, из измельченной соломы и мякины, поступает на разбрасывающее устройство 41, распределяющее материал по полю.
В дальнейшем в целях упрощения жатка 3, наклонный транспортер 4, молотильные агрегаты 7, 7а, 7b и соединенная с ними дека 6 молотильного барабана, подающий барабан 8, сепарирующее устройство 10, очищающее устройство 17, элеватор 18, элеватор 31 для мякины, измельчающее устройство 40, разбрасывающее устройство 41, устройство 28 для опорожнения бункера для зерна и выпускная труба 28а бункера для зерна в совокупности будут называться рабочими агрегатами 20 сельскохозяйственной уборочной машины 1. Необходимая приводная мощность для рабочих агрегатов 20 предоставляется приводом 32, выполненным в виде двигателя внутреннего сгорания, и передается на соответствующий рабочий агрегат 20 посредством ременной или иной передачи.
Кроме того, сельскохозяйственная уборочная машина 1, которая в отличие от изображенного зерноуборочного комбайна 2 может быть также выполнена в виде кормоуборочного комбайна, имеет кабину 21. В кабине 21 расположено, по меньшей мере, одно управляющее устройство 23, оснащенное устройством 22 отображения и устройством 29 ввода и позволяющее управлять или регулировать различные рабочие процессы уборочной машины, инициированные автоматически или вручную оператором 24 сельскохозяйственной рабочей машины 1. Управляющее устройство 23 рассчитано на прием и анализ сигналов от датчиков или сенсорного устройства 37. На основании этого анализа управляющее устройство 23 может, в том числе, управлять рабочими агрегатами 20 или регулировать их. Управляющее устройство 23 обменивается данными в обоих направлениях посредством изображенной на фигуре 1 системы 46 шин с различными рабочими агрегатами 20 уборочной машины 1 или их исполнительными элементами, предназначенными для привода и настройки, а также с приводом 32. На крыше кабины 21 находится оптический датчик 33, который, аналогично датчику 37 на выпускной трубе 28а бункера для зерна соединен с управляющим устройством 23 посредством системы 46 шин.
Известным образом жатка 3 содержит, в том числе, мотовило 25, ножевой брус 26 и втягивающий шнек 27, как показано на фигуре 1.
На фигуре 2 схематично изображена в плане сельскохозяйственная уборочная машина 1 и сопровождающее ее транспортное средство 34 во время процесса перевалки. При этом транспортное средство 34 может представлять собой, например, грузовик или, как показано на фигуре, трактор 35 с прицепом 36. Выпускная труба 28а бункера для зерна повернута на угол ср из положения покоя или транспортного положения в рабочее положение. Числом 39 обозначено место падения убранной культуры в прицеп 36. Место 39 падения перемещается по мере выполнения перевалки по продольной оси прицепа 36 с целью обеспечения равномерного и полного заполнения. Для этого скорость VT движения трактора или скорость VE движения уборочной машины 1 можно временно изменять. В остальном уборочная машина 1 и транспортное средство 34 движутся с одинаковой скоростью VE или VT, что позволяет продолжать процесс уборки во время процесса перевалки. Выполнение процесса перевалки во время процесса уборки позволяет повысить производительность уборочной машины 1 или зерноуборочного комбайна 2.
На фигуре 3 представлена блок-схема, в соответствии с которой осуществляется управление и контроль за процессом перевалки с уборочной машины 1 или зерноуборочного комбайна 2 на транспортное средство 34. С началом процесса перевалки на этапе S1 начинается процесс контроля перевалки во время выполняемого параллельно процесса уборки. Управляющее устройство 23 контролирует рабочее состояние уборочной машины 1 или зерноуборочного комбайна 2, в том числе, во время процесса перевалки.
На рабочее состояние зерноуборочного комбайна 2 влияют различные внутренние и внешние параметры. Один из этих параметров - вмешательство оператора 24 в управление, в результате чего уборочная машина 1 или зерноуборочный комбайн 2 резко ускоряется или замедляется, вследствие чего скорости VE и VT движения зерноуборочного комбайна 2 и транспортного средства 34 изменяются друг относительно друга. Следствием этого изменения может стать смещение транспортного средства 34, движущегося с неизменной скоростью VT, в пространстве относительно зерноуборочного комбайна 2. Соответственно, может случиться так, что убранная культура будет выгружаться за транспортным средством 34 или перед ним, то есть, по меньшей мере, частично будет падать на почву.
Еще одним параметром является необычная ситуация при движении, связанная, например, с распознаванием препятствия перед уборочной машиной 1 и/или транспортным средством 34. Обнаружение препятствия на пути движения уборочной машины 1 и транспортного средства 34 может потребовать выполнения различных маневров уклонения, что приведет к увеличению бокового расстояния между ними. В результате увеличения бокового расстояния, обусловленного разнонаправленными маневрами уклонения, боковое расстояние между уборочной машиной 1 и транспортным средством 34 может превысить максимальное значение, при котором возможно осуществление перевалки без потерь.
Достижение максимального уровня наполнения транспортного средства 34 - еще один параметр, влияющий на рабочее состояние зерноуборочного комбайна 2. При достижении максимального уровня наполнения дальнейшая перевалка убранной культуры на транспортное средство 34 без потерь становится невозможной.
Кроме того, на рабочее состояние влияет соблюдение требований к качеству результатов процесса обработки, выполняемого зерноуборочным комбайном 2. Так как процесс перевалки отнимает заметную долю доступной приводной мощности зерноуборочного комбайна 2, эта доля приводной мощности может не предоставляться в тех рабочих состояниях зерноуборочного комбайна 2, в которых, например, молотильным агрегатам 7, 7а, 7b для сохранения качества обмолота временно необходима более высокая мощность.
На следующих этапах S2-S6 последовательно проверяется наступление критического рабочего состояния, при котором может потребоваться остановить перевалку согласно этапу S7.
На этапе S2 проверяется, имеет ли место вмешательство оператора в управление. Под вмешательством в управление понимают вмешательство оператора в процесс перевалки, например, в форме инициированного вручную ускорения или замедления зерноуборочного комбайна 2 или инициированного оператором поворота выпускной трубы 28а бункера для зерна.
На этапе S3 проверяется наличие перегрузки, например, обусловленной приемом увеличенного объема подлежащей обработке культуры. Для этого датчик частоты вращения определяет снижение частоты вращения привода рабочего агрегата, сепарирующего убранную культуру, и передает эту информацию в виде сигнала частоты вращения на управляющее устройство 23. Управляющее устройство 23 анализирует сигнал частоты вращения, сравнивая текущую частоту вращения каждого рабочего агрегата с заданной частотой вращения, и на основании анализа принимает решение о наличии перегрузки рабочего агрегата 20. При этом заданные значения частоты вращения для различных рабочих агрегатов 20 различаются. При распознавании перегрузки процесс перевалки прерывается. Приводная мощность устройства 28 опорожнения бункера для зерна, высвободившаяся в результате прерывания процесса перевалки, автоматически предоставляется управляющим устройством 23 другим рабочим агрегатам 20, чтобы, по меньшей мере, смягчить состояние перегрузки. Управляющее устройство 23 целенаправленно перенаправляет высвободившуюся приводную мощность на тот или те рабочие агрегаты, которые находятся в состоянии перегрузки.
На следующем этапе S4 проверяется наличие нестандартной дорожной ситуации. Для этого, например, оптический датчик 33, установленный на уборочной машине 1, определяет наличие препятствия перед уборочной машиной 1 и/или транспортным средством 34. Обнаруженное препятствие может потребовать выполнения неравномерного маневра уклонения уборочной машиной 1 и транспортным средством 34. При этом неравномерный маневр уклонения может быть инициирован операторами уборочной машины 1 и транспортного средства 34. Если транспортное средство 34 автоматически управляется уборочной машиной 1, по меньшей мере, во время процесса перевалки, может случиться так, что при обнаружении не нанесенного на схему препятствия система управления уборочной машины 1 инициирует неравномерный маневр уклонения. Чтобы избежать потерь зерна при перевалке, вызванных неравномерным маневром уклонения, управляющее устройство 23 автоматически прерывает процесс перевалки.
Соответственно, датчик может распознавать работу рулевого управления, по меньшей мере, уборочной машины 1 и передавать эту информацию в виде сигнала рулевого управления на управляющее устройство 23 для анализа. Управляющее устройство 23 на основании сигнала рулевого управления определяет отклонение от, по существу, параллельных друг другу траекторий движения уборочной машины 1 и транспортного средства 34. Обусловленное этим занижение или превышение расстояния, необходимого для осуществления перевалки без потерь, приводит к прерыванию процесса перевалки, инициируемому управляющим устройством 23 согласно этапу S7.
На этапе S5 проверяется, возможна ли перевалка на транспортное средство 34. Критерием возможности перевалки считается не только контроль уровня наполнения транспортного средства 34, но и определение наличия транспортного средства 34, а также его удаления от уборочной машины 1. В любом случае отсутствие транспортного средства 34, недостижение или несоблюдение расстояния, необходимого для перевалки, или полное наполнение транспортного средства 34 считается достаточным основанием для определения невозможности перевалки или продолжения перевалки. Контроль уровня наполнения транспортного средства 34 или прицепа 36, а также наличия транспортного средства 34 и его удаленности от уборочной машины 1 выполняется датчиком 37. Датчик 37 может подавать сигнал, отражающий наличие транспортного средства 34, удаленность транспортного средства 34 или соответствующий уровень наполнения транспортного средства 34 или прицепа 36. При достижении максимального уровня наполнения процесс перевалки автоматически прерывается, равно как и при обнаружении отсутствия транспортного средства 34.
На этапе S6 проверяется наличие критического состояния процесса. Критическое состояние процесса характеризуется тем, что рабочий агрегат 20, отличающийся от устройства 28 опорожнения бункера для зерна, переходит в рабочее состояние, в котором результат работы или эксплуатационные характеристики не соответствуют заданным. Например, материал, выбрасываемый из выполненного в виде радиального распределителя устройства для разбрасывания измельченного материала, неравномерно распределяется по почве, или полоса разброса не достигает заданной ширины, что соответствует критическому состоянию процесса. Кроме того, может возникнуть ситуация, в которой вследствие эксплуатации привода 32 в режиме толкателя с электроприводом, то есть, в режиме предельной нагрузки, и при одновременном запросе дополнительных резервов мощности эксплуатационные характеристики привода 32 перейдут в критический диапазон, что может привести к выходу привода 32 из строя. Кроме того, это может привести к засорению рабочих агрегатов уборочной машины 1, устранение которого займет много времени. Возникновение критического состояния процесса приводит к прерыванию процесса перевалки согласно этапу S7 с целью высвобождения приводной мощности, расходуемой устройством 28 опорожнения бункера для зерна.
Приводная мощность, высвободившаяся в результате прерывания процесса перевалки, направляется управляющим устройством 23 в зависимости от рабочей ситуации, по меньшей мере, на один рабочий агрегат 20, находящийся в критическом состоянии процесса, с целью устранения критического состояния при помощи данной поддерживающей операции.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 уборочная машина
2 зерноуборочный комбайн
3 жатка
4 наклонный транспортер
5 стрелка
6 дека молотильного барабана
7 молотильные агрегаты
7а барабан предварительного ускорения
7b молотильный барабан
8 подающий барабан
9 клавишный соломотряс
10 сепарирующее устройство
11 зерно
12 возвратная пластина
13 подающая пластина
14 уровень фильтрации
15 уровень фильтрации
16 воздуходувное устройство
17 очищающее устройство
18 элеватор
19 бункер для зерна
20 рабочий агрегат
21 кабина оператора
22 устройство отображения
23 управляющее устройство
24 оператор
25 мотовило
26 ножевой брус
27 втягивающий шнек
28 устройство опорожнения бункера для зерна
28а выпускная труба бункера для зерна
29 устройство ввода
30 приемная пластина
31 элеватор для мякины
32 привод
33 оптический датчик
34 транспортное средство
35 трактор
36 прицеп
37 датчик
38 свободный конец выпускной трубы бункера для зерна
39 место падения
40 измельчающее устройство
41 разбрасывающее устройство
42 измельчающий барабан
43 корпус измельчителя
44 нож
45 противорежущая пластина
46 система шин
VE скорость движения
VT скорость движения
ϕ угол поворота
Реферат
Группа изобретений относится к сельскому хозяйству. Во время уборки урожая управляют процессом перевалки урожая между самоходной уборочной машиной и транспортным средством, во время которого передают убранную культуру на транспортное средство. Во время процесса перевалки посредством управляющего устройства контролируют рабочее состояние уборочной машины. При обнаружении критической рабочей ситуации посредством управляющего устройства автоматически инициируют отключение перевалочного устройства. Группа изобретений обеспечивает снижение потерь урожая при перевалке. 2 н. и 13 з.п. ф-лы, 3 ил.
Формула
Документы, цитированные в отчёте о поиске
Система управления перегрузкой убранной массы в сельскохозяйственной машине
Комментарии