Самоходный рабочий агрегат - RU2240674C2
Код документа: RU2240674C2
Чертежи
Описание
Изобретение относится к самоходному рабочему агрегату с приводным двигателем, мощность которого разделяется на привод передвижения и вспомогательный привод для привода рабочих аппаратов, и по меньшей мере с одним измерительным устройством, которое непосредственно или косвенно определяет мощность, передаваемую на вспомогательный привод, и при его перегрузке вырабатывает сигнал управления для регулятора мощности с целью регулирования выходной мощности приводного двигателя.
К самоходным рабочим агрегатам такого типа относятся, например, сельскохозяйственные машины, такие как зерноуборочные комбайны, полевые измельчители, а также тракторы и строительные машины.
Так, самоходный зерноуборочный комбайн наряду с приводом передвижения в виде механического привода или расположенного за приводным двигателем гидростатического привода, от которого приводная мощность гидростатически передается на ведущие колеса, имеет целый ряд рабочих аппаратов (режущий аппарат, молотильный и сепарирующий рабочие органы, соломорезку, вентилятор, элеватор и т.д.), которые дополнительно приводятся от вала приводного двигается непосредственно или косвенно в качестве вспомогательного привода.
В полевом измельчителе вспомогательные приводы предусмотрены для привода сменного аппарата, измельчительного аппарата, метателей и других рабочих аппаратов. Эти рабочие аппараты включены в кинематическую цепь для параллельного привода одних и последовательного привода других аппаратов.
В тракторах наряду с приводом передвижения и гидравлическим насосом известным образом предусматривается вал отбора мощности (ВОМ) для привода дополнительных рабочих аппаратов. По хозяйственным соображениям стремятся подсоединить к приводному двигателю трактора как можно больше дополнительных рабочих аппаратов. Это стремление привело к тому, что многие тракторы имеют два ВОМ (один задний и один передний). В некоторых тракторах имеется и еще один, расположенный выше, ВОМ для передачи мощности приводного двигателя дополнительным аппаратам в верхней конструктивной зоне трактора.
Для того чтобы удовлетворить энергопотребности этих самоходных рабочих агрегатов в отношении как привода передвижения, так и вспомогательных приводов, требуются все более высокие мощности на выходе приводного двигателя. При этом отдельные рабочие аппараты и механизм привода передвижения по конструктивным условиям могут иметь привод только до определенной максимальной величины входной мощности или, соответственно, до максимального крутящего момента. В определенных ситуациях при эксплуатации может случиться так, что приводной двигатель дает на выходе более высокий крутящий момент, чем могут воспринять вспомогательные приводы или отдельные вспомогательные приводы или передачи трансмиссии. Это может вызвать повреждение или повышенный износ элементов привода, рабочих аппаратов или передач.
Решение указанной проблемы является задачей изобретения, например, по заявке на выдачу патента ФРГ №19624085 А1. В заявке описан самоходный рабочий агрегат в виде цементовоза, в котором в дополнение к приводу передвижения имеется в качестве вспомогательного привода мешалка цементного раствора с приводом от приводного двигателя. Привод передвижения требует здесь приводного двигателя, который может развивать крутящий момент значительного выше максимального допустимого крутящего момента для мешалки цементного раствора.
Для цементовоза имеются по существу два режима работы: а) транспортное движение цементовоза с одновременным приводом мешалки; б) стояночное положение с приводом мешалки. В режиме б), когда крутящий момент приводного двигателя полностью приходится на мешалку, возможен случай превышения максимального допустимого крутящего момента для мешалки. В связи с этим в заявке ФРГ №19624085 А1 предлагается в эксплуатационном режиме б) с помощью регулятора мощности автоматически ограничивать крутящий момент приводного двигателя, когда достигнут максимальный допустимый крутящий момент мешалки цементного раствора. Однако для осуществления этого автоматического ограничения крутящего момента водитель должен предварительно привести систему управления в действие с помощью включателя. Кроме того, защита от перегрузки предусмотрена только для режима привода в стояночном положении при неработающем приводе передвижения, а также нет защиты самого привода передвижения. Кроме одной функции защиты мешалки предлагаемое устройство контроля крутящего момента не оказывает никакого другого регулирующего влияния на приводной двигатель.
Для самоходных рабочих агрегатов, особенно для упомянутых сельскохозяйственных машин, проблема усложняется тем, что, с одной стороны, в них, как правило, наряду с приводом передвижения имеется большое число вспомогательных приводов с множеством рабочих аппаратов и, с другой стороны, больше количество режимов эксплуатации, когда требуются различные крутящие моменты для вспомогательных приводов и привода передвижения, по сравнению с цементовозом по заявке ФРГ №19624085 А1. В отношении регулирования приводного двигателя желательно не только защитить от перегрузки отдельный аппарат посредством снижения мощности двигателя, а осуществлять регулирование приводного двигателя таким образом, чтобы максимально реализовать мощность для рабочего функционирования рабочего агрегата и в то же время не допускать перегрузки рабочих аппаратов.
Различные режимы при эксплуатации зерноуборочного комбайна и связанная с ними постоянно меняющаяся нагрузка на отдельных рабочих аппаратах создаются, например, при движении машины в зерновых различной густоты, при уборке урожая на холмистой местности, при различных состояниях почвы, при транспортных переездах по дорогам и т.д. Кроме того, переход из одного режима в другой может быть как постепенным, так и почти мгновенным.
Для тракторов с несколькими ВОМ в качестве вспомогательных приводов режим работы зависит от того, какие дополнительные рабочие аппараты включаются в действие, а также приводятся ли одновременно два, а может быть и три ВОМ. Здесь также возможно большое число вариантов.
Задачей, на решение которой направлено настоящее изобретение, является усовершенствование самоходного рабочего агрегата таким образом, чтобы обеспечить надежное и удобное для водителя управление агрегатом.
Техническим результатом, достигаемым в настоящем изобретении, является возможность автоматического поддержания оптимального режима работы привода самоходного рабочего агрегата в различных режимах эксплуатации без недопустимой перегрузки отдельных вспомогательных приводов или привода передвижения.
В соответствии с изобретением поставленная задача решена в самоходном рабочем агрегате с приводным двигателем, мощность которого разделяется на привод для передвижения и по меньшей мере на один вспомогательный привод для передачи мощности на рабочие аппараты, содержащий по меньшей мере одно измерительное устройство для определения по меньшей мере одной предельной величины передаваемой на вспомогательный привод мощности и выработки при перегрузке на указанном вспомогательном приводе управляющего сигнала на регулятор мощности для регулирования выходной мощности приводного двигателя. Согласно изобретению агрегат дополнительно снабжен по меньшей мере одним измерительным устройством для определения мощности в приводе для передвижения, а также устройством обработки данных и управления для приема от указанных измерительных устройств сигналов об определяемых ими величинах в качестве входных сигналов и вырабатывающим в зависимости от указанных входных сигналов управляющий сигнал на регулятор мощности для регулирования выходной мощности приводного двигателя. При этом устройство обработки данных и управления содержит блок памяти, в котором хранятся предельные величины максимальной допустимой мощности для по меньшей мере одного вспомогательного привода и для привода передвижения, а также хранения с возможностью изменения по меньшей мере одной максимальной предельно допустимой величины, такой как, например, крутящий момент, давление или расход, для отдельного вспомогательного привода и привода передвижения. Устройство обработки данных и управления выполнено с возможностью выработки управляющего сигнала для снижения выходной мощности или, соответственно, числа оборотов приводного двигателя при превышении установленной предельной величины по меньшей мере в одном из вспомогательных приводов и/или в приводе передвижения, на повышение выходной мощности или, соответственно, числа оборотов приводного двигателя выше номинального значения для повышения выходной мощности вместо снижения и с возможностью выработки сигнала на приведение выходной мощности приводного двигателя вновь в соответствие с новой допустимой предельной величиной мощности или до прежней величины при прекращении действия ограничивающего критерия.
Вычисление текущих величин, определяющих предельную мощность, таких как число оборотов, крутящий момент, давление, напряжение или ток, может быть передано измерительным устройствам, которые сами по себе известны. При этом предусмотрено непосредственное определение соответствующими датчиками крутящих моментов на валах привода передвижения и вспомогательных приводов. Вместо непосредственного определения крутящих моментов в связи с устройством обработки данных и управления могут применяться известные для специалиста в данной области различные непрямые средства измерений, отражающие нагрузку отдельных компонентов. В случае гидростатического привода это могут быть, например, датчик давления в гидравлической системе и датчик расхода гидравлической жидкости. Для ременных вспомогательных приводов крутящий момент может быть вычислен косвенным путем, например, с помощью соответствующих устройств измерения проскальзывания ремней. Далее, мощность в силовой трансмиссии может отражаться величиной смещения установочного рычага, смещения натяжных устройств ременной или цепной передачи или током установочного или приводного двигателя. При такой системе регулирования с защитой от перегрузок нет необходимости в том, чтобы информировать водителя, сколько и какие приводы находятся в действии в данный момент и какие величины предельной мощности установлены для них.
Управляющий сигнал S является функцией различных величин, предельной мощности, например, функцией отдельных крутящих моментов: S=f(mg, mn1, mn2, МN3...). При этом mg обозначает крутящий момент, действующий на привод передвижения, a МNi - крутящий момент, действующий на привод соответствующего номера “i”. С помощью соответствующей программы в устройстве обработки данных и управления, которое предпочтительно выполнено в виде микропроцессора и снабжено необходимым программным обеспечением, входные сигналы могут оцениваться в соответствии с различными показателями и сводиться вместе. Таким образом, впервые обеспечивается возможность адекватного автоматического регулирования мощности для самоходных рабочих агрегатов, которые наряду с приводом передвижения оснащены также несколькими вспомогательными приводами, приводимыми от приводного двигателя. В зависимости от ситуации приводной двигатель может при необходимости автоматически регулироваться по мощности на понижение и вновь на повышение, благодаря чему понижение мощности приводного двигателя производится только в необходимых случаях и обеспечивается новый уровень соответствия расхода мощности реальным рабочим условиям. Автоматическое регулирование мощности приводного двигателя удобно для водителя, так как нет необходимости его участия в процессе регулирования.
В упомянутых выше самоходных рабочих агрегатах в качестве приводных двигателей преимущественно используются дизельные двигатели, в которых для регулирования мощности имеется топливный насос, предпочтительно с электронным управлением. В предпочтительном варианте осуществления регулятор мощности приводного двигателя может быть выполнен с возможностью непосредственного управления топливным насосом. При изменившейся потребности в мощности в приводе передвижения или по меньшей мере в одном вспомогательном приводе регулятор мощности получает от устройства обработки данных и управления управляющий сигнал для топливного насоса таким образом, что количество подаваемого топлива или, соответственно, число оборотов двигателя приводится в соответствие с новой потребностью в мощности. При этом имеется возможность простым способом влиять на подачу топлива от насоса в камеры сгорания двигателя посредством управляющего сигнала на топливный насос, что оказывает непосредственное влияние на мощность приводного двигателя.
В устройстве обработки данных и управления могут быть предусмотрены для вспомогательных приводов различные факторы оценки для определения управляющего сигнала для регулирования мощности приводного двигателя, причем указанные факторы оценки в устройстве обработки данных и управления могут быть записаны в памяти с возможностью изменения.
Предпочтительно, чтобы регулятор мощности содержал электронную систему управления приводным двигателем. По управляющим сигналам S от устройства обработки данных и управления мощность приводного двигателя может изменяться посредством изменения графической характеристики двигателя или посредством переключения на различные графические характеристики или, соответственно, параметрические характеристики двигателя, сохраненные в системе управления двигателем.
Агрегат согласно изобретению может быть выполнен в виде уборочного комбайна и снабжен по меньшей мере одним датчиком для текущего определения количества собранной продукции, проходящей через комбайн. На базе сигнала указанного датчика необходимая потребность в мощности в определенном вспомогательном приводе определяется предварительно и обрабатывается в устройстве обработки данных и управления для управления приводным двигателем. Указанный датчик передает данные количества собранной продукции до достижения рабочего аппарата с ограничением мощности в данный момент времени.
Так например, с помощью датчика в приемном канале зерноуборочного комбайна может быть заранее определен объем продукции, который поступит в молотильный аппарат, и может быть автоматически кратковременно повышена мощность приводного двигателя для своевременной подачи энергии и развития момента на вращающемся молотильном барабане перед обработкой большой массы продукции. Все это осуществляется под контролем устройства обработки данных и управления.
В другом варианте осуществления изобретения самоходный рабочий агрегат может состоять из тягача и навешенного или прицепленного к нему рабочего аппарата, рабочие органы которого приводятся по меньшей мере одним вспомогательным приводом, а предельные величины мощности в отдельных главном или, соответственно, вспомогательных приводах навесного или прицепного рабочего аппарата привлекаются при вычислении управляющего сигнала S для регулятора мощности. Предпочтительно, чтобы измерительные устройства, устройство обработки данных и управления и система управления двигателем были объединены в электронную схему связи, например систему CAN-Bus, через которую передаются величины, определяющие предельную мощность, такие как, например, крутящий момент на вспомогательном приводе или на ответвляющемся от него дальнейшем приводе.
В заявленном устройстве с помощью предложенного измерения крутящих моментов, давлений или напряжений можно также посредством управляющего сигнала мобилизовать резервную мощность приводного двигателя, когда устройство обработки данных и управления на основе измерений определяет, что ни один из рабочих агрегатов или привод передвижения не будут перегружены вследствие кратковременного увеличения мощности приводного двигателя или что должно быть преодолено подключение дополнительного рабочего агрегата. Примером может служить случай, когда все или определенные вспомогательные приводы и/или привод передвижения находятся в расчетной надежной области по крутящему моменту и не выйдут из нее при повышении мощности. Так например, в процессе работы зерноуборочного комбайна на откосах и спусках при работающем молотильном аппарате выходная мощность приводного двигателя может быть повышена до величины, выше номинальной, без опасности для привода передвижения, в то время как при транспортном движении с неработающими дополнительными рабочими аппаратов это вызвало бы перегрузку привода передвижения.
В еще одном предпочтительном варианте осуществления в самоходном рабочем агрегате дополнительно к предельным величинам мощности в указанных вспомогательных приводах и приводе передвижения в устройстве обработки данных и управления для регулирования мощности приводного двигателя используется по меньшей мере еще один параметр Z, ограничивающий режим приводного двигателя, вспомогательных приводов и/или привода передвижения, причем параметр Z образован из других данных привода передвижения, других механизмов и/или по меньшей мере одного из вспомогательных приводов.
Особое преимущество состоит в том, что максимальные допустимые моменты отдельных вспомогательных приводов могут быть записаны в памяти с возможностью изменения. Так например, к трактору с несколькими ВОМ могут быть подсоединены и приводиться одновременно различные дополнительные аппараты без опасности перегрузки отдельного дополнительного рабочего аппарата. Оператор должен только ввести в память максимальные допустимые крутящие моменты для вспомогательных приводов в зависимости от подсоединяемых дополнительных рабочих аппаратов. Они могут быть записаны путем ручного ввода величин или просто путем выбора названия соответствующего рабочего аппарата (косилка, копатель - изготовитель, тип) в перечне аппаратов, которые записаны в центральном вычислительном устройстве рабочего агрегата вместе с соответствующими предельными величинами.
В изобретении может быть предусмотрено, что в устройстве обработки данных и управления имеются различные существенные параметры (Х1, Х2, Х3) для вспомогательных приводов для расчета управляющего сигнала S регулирования мощности приводного двигателя: S=f(

Кроме того, в изобретении может быть предусмотрено, что в устройстве обработки данных и управления для регулирования мощности приводного двигателя используется дополнительно к крутящим моментам во вспомогательных приводах и приводе передвижения еще по меньшей мере одна ограничивающая режим величина, один ограничительный параметр для по меньшей мере одного из вспомогательных приводов и/или привода передвижения. За счет этого достигается дополнительная надежность привода и приводной двигатель интегрируется в систему регулирования мощности. Так, в устройстве обработки данных и управления для регулирования мощности приводного двигателя могут использоваться такие параметры, как температура охлаждающей воды или масла в приводном двигателе. В том случае, когда устройство обработки данных и управления с помощью соответствующих чувствительных средств устанавливает, что величина ограничительного параметра приближается к критической, оно может с помощью соответствующего алгоритма регулирования отрегулировать мощность приводного двигателя таким образом, чтобы кривая приближения к критической величине ограничительного параметра стала более пологой и приближение к критической величине происходило замедленно. При этом обеспечивается не резкое, а постепенное снижение мощности приводного двигателя. Такое решение обеспечивает дополнительную надежность привода, создавая лишь незначительные помехи рабочему процессу агрегата.
Еще в одном варианте осуществления предусмотрена система регулирования мощности, которая также и при неравномерной загрузке обеспечивает по существу равномерный привод рабочего агрегата. Для этого при кратковременном повышении мощности или при резком падении числа оборотов без смещения педали газа с помощью соответствующего алгоритма устройства обработки данных и управления кратковременно повышается подача топлива в приводной двигатель, а затем она с более высокой константой по времени, то есть плавно, возвращается к первоначальной величине. Дальнейшее повышение эффективности устройства достигается в случае, когда соответствующие датчики перед рабочим аппаратом, потребляющим наибольшую часть имеющейся в распоряжении мощности, определяют изменения объема потока собираемой продукции и передают эти данные в устройство обработки данных и управления. Тогда последующий пик нагрузки на рабочем аппарате воспринимается за счет развития дополнительного махового момента и/или повышения крутящего момента привода. Можно также предусмотреть снижение мощности приводного двигателя при снижении энергопотребления, например, в целях экономии топлива. Например, в полевом измельчителе с высоким потреблением энергии измельчительным барабаном такое устройство может служить для того, чтобы снимать резкие падения числа оборотов всех компонентов и выравнивать скорость рабочего процесса с тем, чтобы не нарушался процесс выгрузки продукции в идущее рядом транспортное средство.
Далее изобретение поясняется на примерах выполнения со ссылками на чертежи, на которых
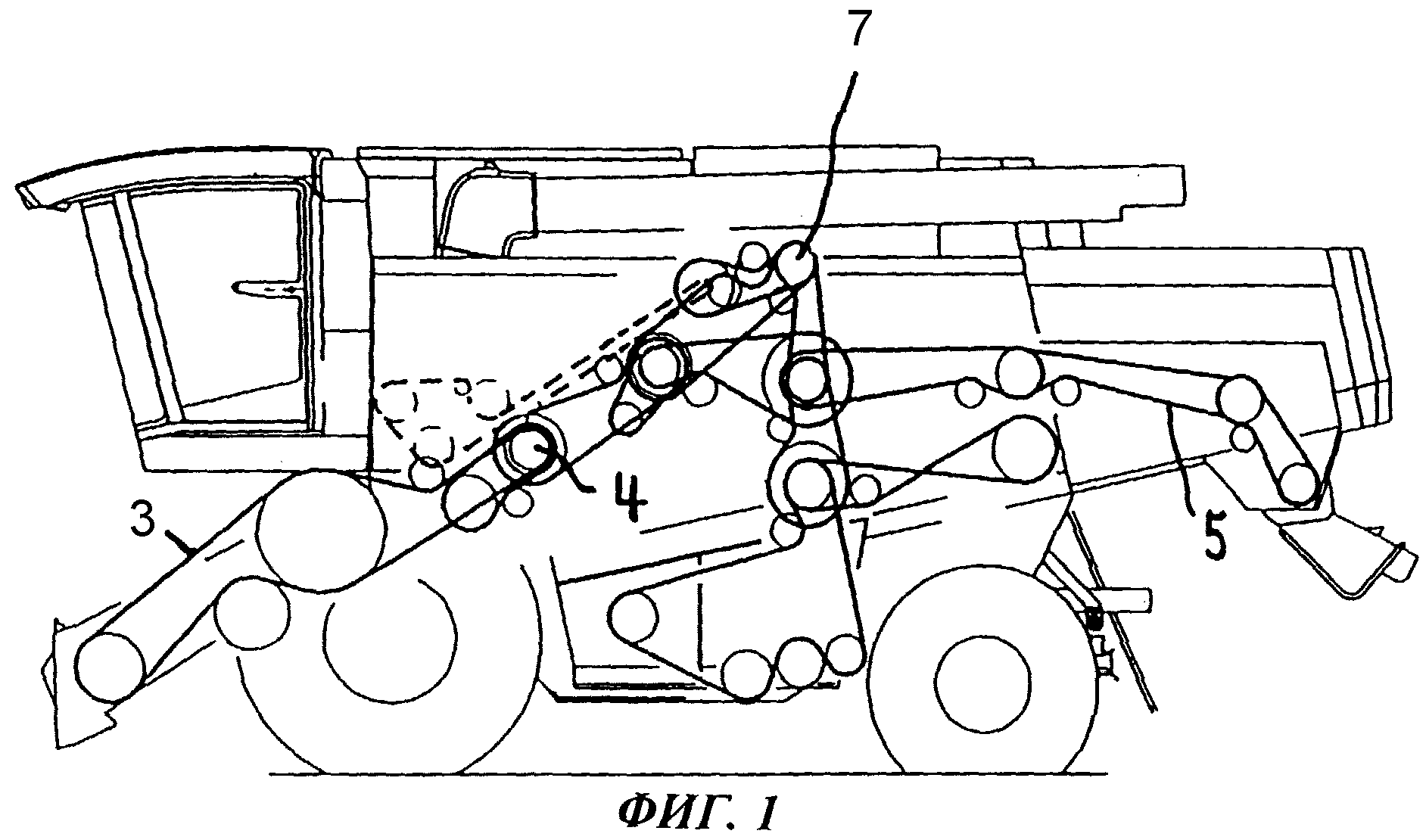
фиг.1 представляет в схематичном виде в разрезе зерноуборочный комбайн с вспомогательными приводами (рабочими аппаратами), приводимыми от приводного двигателя;
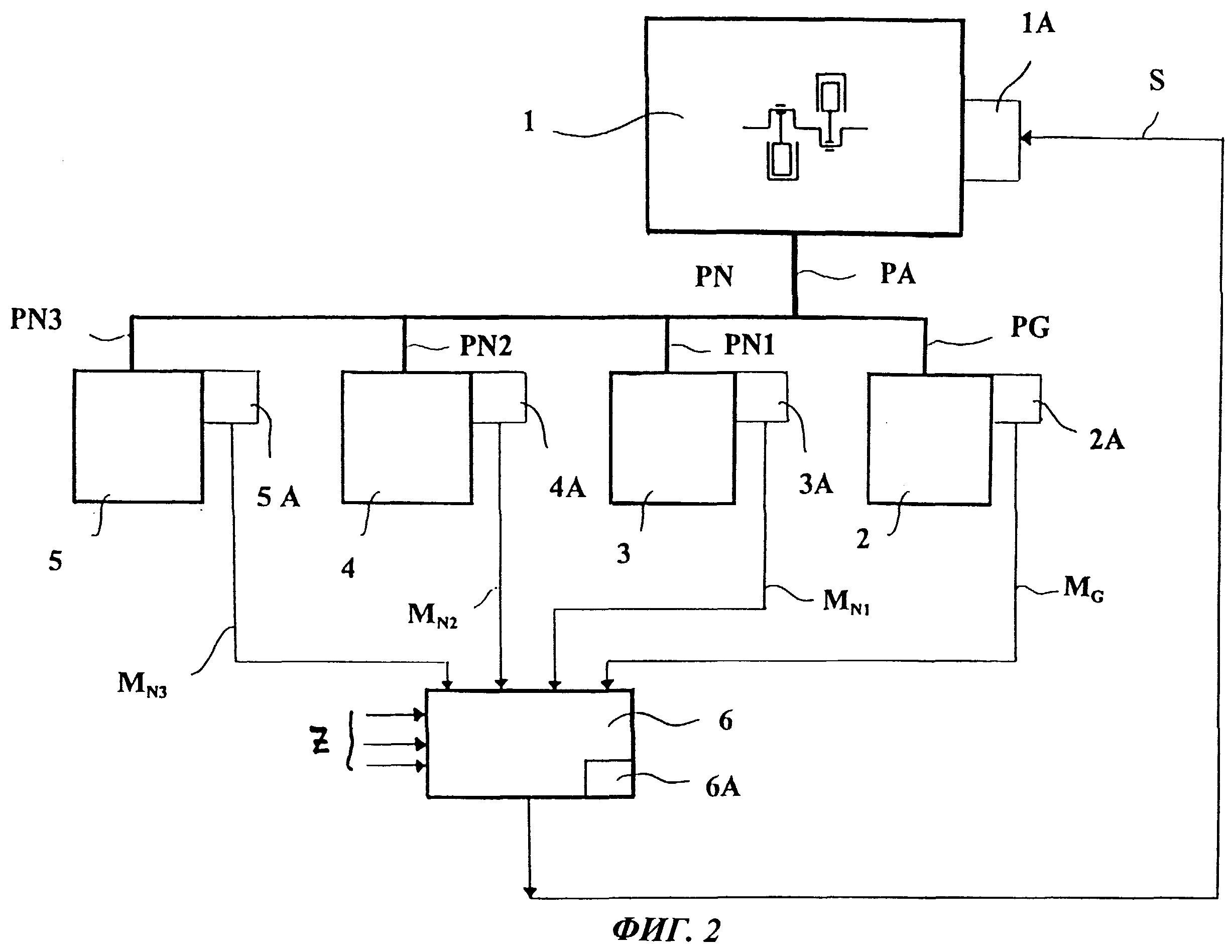
фиг.2 изображает структурную схему привода;
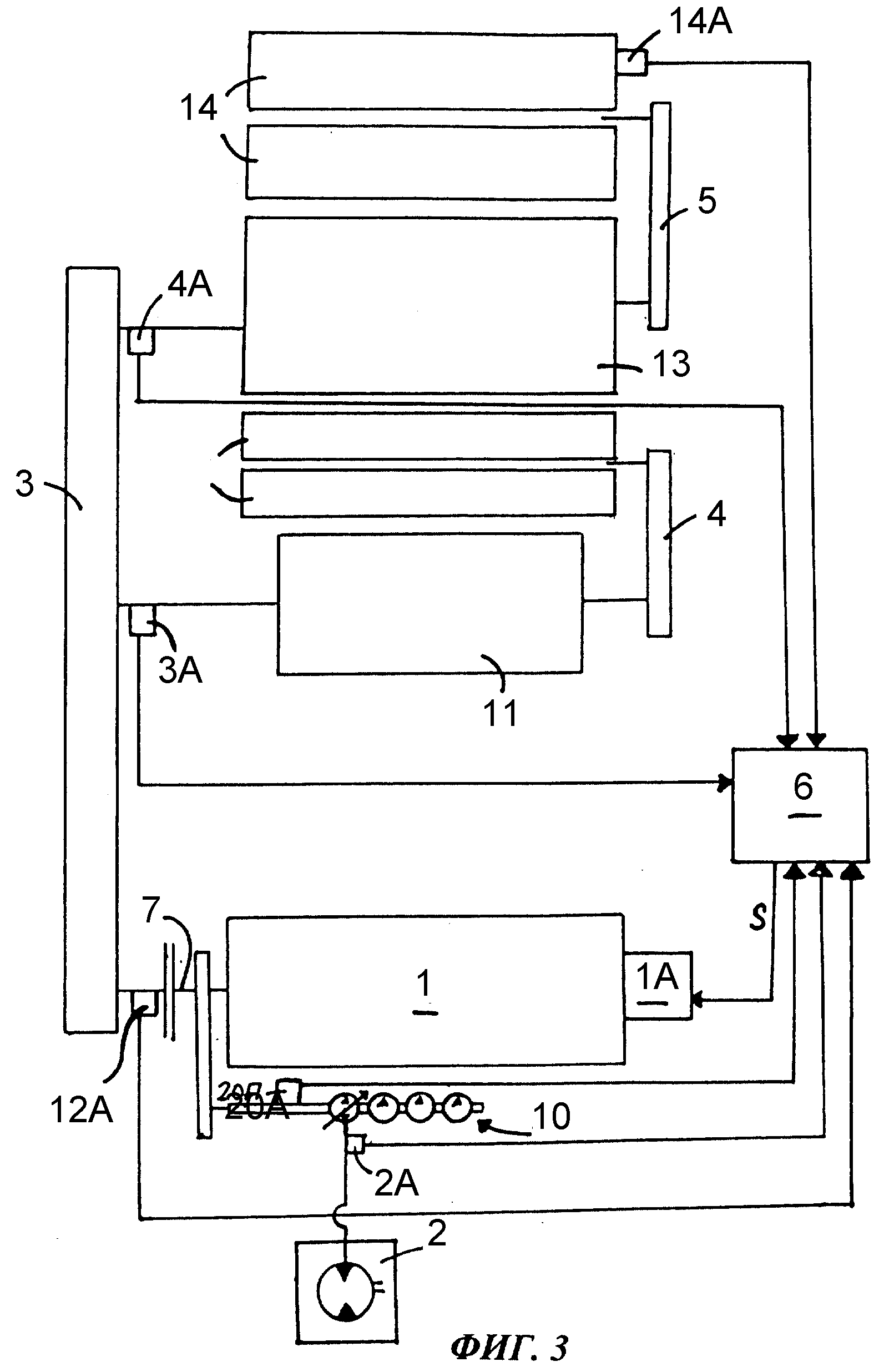
фиг.3 изображает схему привода полевого измельчителя;
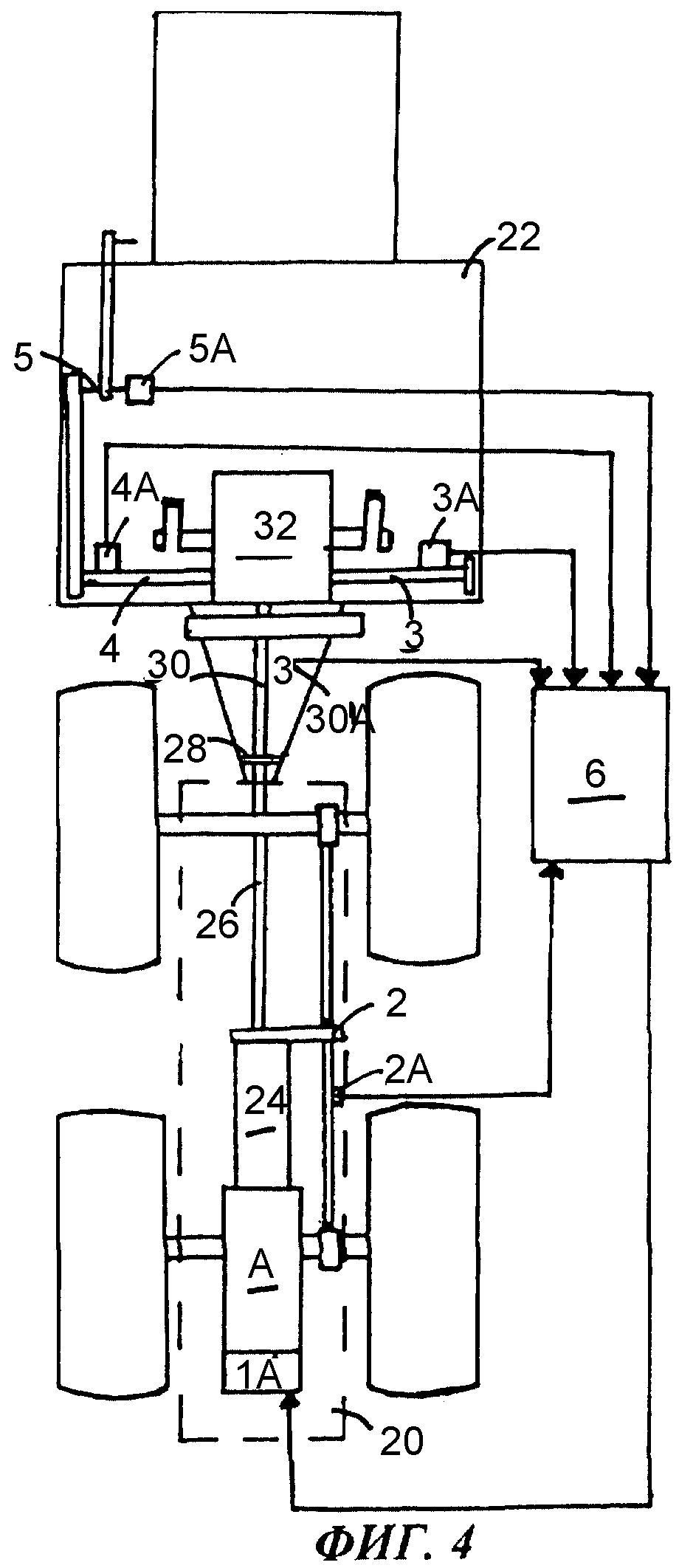
фиг.4 изображает трактор в качестве базовой машины с навешенным на него прессом для больших тюков сена.
На фиг.1 схематично показан в разрезе зерноуборочный комбайн. От приводного двигателя, который здесь не обозначен, приводятся посредством вспомогательных приводов различные рабочие аппараты. В качестве примера обозначены вспомогательный привод 3 режущего аппарата, вспомогательный привод 4 молотильного аппарата и вспомогательный привод 5 соломорезки. Другие вспомогательные приводы (рабочие аппараты) не перечислены для упрощения. Устройство 7 отбора мощности служит для передачи мощности вспомогательным приводам от приводного двигателя.
На фиг.2 также схематично показана структурная схема, которая содержит приводной двигатель 1 с регулятором 1А мощности, механизм привода 2 передвижения и три вспомогательных привода 3, 4, 5. Выходная мощность (PA) приводного двигателя 1 разделяется на мощность PG, подаваемую на механизм 2, и мощность (PN; PN1, PN2, PN3), подаваемую на вспомогательные приводы. Измерительные устройства 2А, 3А, 4А, 5А, предназначенные для восприятия предельных величин мощности, в данном случае крутящих моментов, вырабатывают входные сигналы mg, mn1, МN2, МN3 для устройства 6 обработки данных и управления. Устройство 6 обработки данных и управления воспринимает передаваемые данные измерений от измерительных устройств 2А, 3А, 4А, 5А и преобразует их в управляющий сигнал S. Программа обработки и предельные величины для отдельных приводов записаны в запоминающем устройстве 6А. Обработка данных с получением управляющего сигнала S осуществляется с помощью соответствующего программного обеспечения в виде программы обработки и сравнения замеренных величин с предельными. Если сравнение показывает, что заложенная в памяти предельная величина для одного или нескольких приводов рабочих аппаратов и/или привода передвижения превышена, а также если замеренная величина намного ниже допустимой предельной величины, то на регулятор 1а мощности передается управляющий сигнал S, выработанный на основе разницы между замеренными величинами и записанными в памяти предельными величинами. Вывод может осуществляться, например, с помощью также записанного в памяти массива данных или посредством соответствующего управляющего алгоритма. Если при последующем сравнении замеренных величин с предельными величинами в устройстве 6 обработки данных и управления имеется изменение величины разницы, указанное устройство 6 обработки данных и управления передает новый управляющий сигнал S, который снова передается на регулятор 1А мощности. Если сравнение замеренных величин с предельными величинами осуществляется в короткой временной последовательности, то достигается регулирование с высокой частотой, требующее от водителя самоходного рабочего агрегата только текущего наблюдения без резких управляющих действий.
Описанный процесс управления позволяет избежать перегрузки отдельного или нескольких рабочих аппаратов или привода передвижения путем уменьшения приводной мощности приводного двигателя 1. Однако возможно также мобилизовать резервы мощности приводного двигателя 1, когда от измерительной системы поступают данные о неполной загрузке привода 2 передвижения или вспомогательных приводов 3, 4, 5. В обоих направлениях управления целесообразно производить процесс управления с учетом рабочих характеристик приводного двигателя. Для этого устройство 6 обработки данных и управления может получать данные о параметре Z, например о температуре охлаждающей среды и/или масла в приводном двигателе 1, о давлении наддува в турбокомпрессоре, о регулировке зажигания и клапанов в приводном двигателе 1, и привлекать их в процессе выработки управляющего сигнала S. При таком осуществлении изобретения будут привлечены к процессу управления приводом и защищены от перегрузки и интенсивного износа не только следующие за приводным двигателем 1 элементы привода, но и сам приводной двигатель 1. Кроме того, в качестве параметра Z могут быть учтены такие данные привода, как температура охлаждающей среды и/или масла в приводе передвижения в одном или нескольких вспомогательных приводах или других механизмах. Кроме того, в качестве параметра Z могут быть использованы вводимые вручную или автоматизированные величины изменения записанных в памяти предельных величин или алгоритмы управления для устройства 6 обработки данных и управления. Так, предельные величины могут быть изменены при замене сменного аппарата, такого как режущий аппарат, или при включении дополнительных аппаратов, в частности обрабатывающих, молотильных или режущих аппаратов самоходного рабочего агрегата. Автоматизированное изменение записанных в памяти предельных величин может осуществляться, например, с помощью переключателя опознавания сменного аппарата, который при присоединении сменного аппарата к самоходному рабочему агрегату передает на устройство 6 обработки данных и управления сигнал опознавания, или с помощью стандартной программы, которая распознает подсоединение или отсоединение какого-либо компонента, например, путем текущего опроса управляющих включателей.
На фиг.3 показана схема привода самоходного полевого измельчителя. Приводной двигатель 1 передает мощность на вспомогательные приводы через устройство 7 отбора мощности. Для привода 2 передвижения и выполнения отдельных установочных функций к устройству 7 отбора мощности подсоединен гидравлический насос 10, приводная мощность которого находится под наблюдением датчика 20А. Через вспомогательные приводы 3, 4, 5 мощность передается на метатель 11, плющильные вальцы 12, измельчительный барабан 13 и подпрессовывающие валики 14, являющиеся рабочими аппаратами. Передаваемая через вспомогательный привод 3 мощность находится под контролем расположенных на соответствующих приводных валах датчиков 20А, 12А, 3А, 4А, которые передают воспринятые данные в устройство 6 обработки данных и управления. Устройство 6 обработки данных и управления в свою очередь передает управляющий сигнал S на регулятор 1А мощности приводного двигателя 1. Независимо от конкретного примера выполнения по фиг.3 для изобретения в сущности не имеет значения, осуществляется ли сравнение с предельными величинами в устройстве 6 обработки данных и управления или это сравнение осуществляется уже в датчиках 2А, 3А, 4А, 5А, 20А, которые должны быть для этого оснащены соответствующими вычислительными элементами для сравнения и для выдачи данных, и датчики 2А, 3А, 4А, 5А, 12А, 20А передают на устройство 6 обработки данных и управления первично обработанный сигнал. Для повышения скорости управления устройства 6 обработки данных и управления может быть целесообразно, чтобы в нем производились не все операции оценки, а только передаваемые от датчиков 2А, 3А, 4А, 5А, 20А соотношения величин. При этом также меньше была бы загружена объемом данных система связи CAN-Bus, к которой могут быть подсоединены все элементы системы и датчики 2А, 3А, 4А, 5А, 12А, 20А. В случае передачи от одного из датчиков 2А, 3А, 4А, 12А, 20А сигнала о перегрузке устройство 6 обработки данных и управления передает управляющий сигнал S, на основании которого понижается мощность приводного двигателя 1. Если датчики 2А, 3А, 4А, 12А, 20А сообщают о том, что предельные величины не достигнуты, устройство 6 обработки данных и управления может передавать сигнал S регулировки либо на понижение, либо на повышение мощности в целях достижения оптимальной мощности самоходного рабочего агрегата. Процесс зависит только от параметров управления, которые могут вводиться вручную водителем или заложены в запоминающем устройстве и могут быть вызваны.
На подпрессовывающем валике 14 установлен датчик 14А, который воспринимает отклонение валика 14 соответственно количеству подлежащей обработке продукции и на основании этого отклонения, примерно пропорционального объему массы продукции, сообщает о последующей нагрузке рабочих аппаратов. Замеренная величина передается на устройство 6 обработки данных и управления. Если сравнение замеренных величин на датчиках 4А и 14А показывает, что реально передаваемый крутящий момент недостаточен для переработки объема продукции, принимаемой измельчительным барабаном 13 без значительного снижения производительности, устройство 6 обработки данных и управления может передать на регулятор 1А мощности управляющий сигнал S, по которому могут быть кратковременно повышены мощность привода или, соответственно, число оборотов приводного двигателя 1, чтобы обеспечить беспрепятственную обработку соответствующего объема продукции. Чувствительная схема датчиков 14А могла бы также измерять смещение прижимов, крутящий момент питающего шнека или подборщика; сканирующий лазерный датчик мог бы определять высоту валка перед самоходным полевым измельчителем. Сходная в функциональном отношении чувствительная система может быть смонтирована соответствующим образом на любом другом самоходном рабочем агрегате, например, подобная система датчиков может использоваться в режущем аппарате или наклонном питателе зерноуборочного комбайна или в прицепном или самоходном прессе для тюков сена.
На фиг.4 схематично показан трактор 20 с навесным прессом 22 для больших тюков сена. Трактор 20 оснащен приводным двигателем 1, передающим мощность на механизм 24, от которого мощность отбирается через трансмиссию на привод 2 передвижения, представленный в данном примере в виде привода на все колеса, и на вал 26 отбора мощности. Мощность от вала 26 отбора мощности передается через муфту 28 на карданный вал 30 для привода прицепного к трактору 20 пресса 22 для больших тюков сена. Карданный вал 30 отводит мощность на главный механизм 32 привода прицепного пресса 22 для больших тюков сена. От главного механизма 32 приводятся различные рабочие органы пресса 22, в частности подборщик - вспомогательным приводом 3, подающее устройство - вспомогательным приводом 4 и вязательное устройство - промежуточным валом 5. Датчики 2А, 3А, 4А, 5А, 30А, установленные на приводе передвижения и на вспомогательных приводах прицепного пресса 22 для больших тюков сена, связаны непосредственно или с помощью устройств сопряжения с устройством 6 обработки данных и управления, которое после обработки замеренных величин вырабатывает управляющий сигнал S и передает его на регулятор 1А мощности приводного двигателя 1. Таким же образом может осуществляться предложенное управление приводом и для группы тягачей с прицепным или навесным рабочим аппаратом, приводимым от тягача.
Выше даны описания примеров выполнения изобретения. Для специалиста в данной области не представит труда произвести замену отдельных технических решений другими вариантами в соответствии с его конкретными требованиями и конкретными машинами.
Реферат
Агрегат, мощность которого разделяется на привод для передвижения и по меньшей мере на один вспомогательный привод для передачи мощности на рабочие аппараты, содержащий по меньшей мере одно измерительное устройство для определения по меньшей мере одной предельной величины передаваемой на вспомогательный привод мощности и выработки при перегрузке на указанном вспомогательном приводе управляющего сигнала на регулятор мощности для регулирования выходной мощности приводного двигателя. Агрегат имеет по меньшей мере одно измерительное устройство для определения мощности в приводе для передвижения, а также устройство обработки данных и управления, для приема от указанных измерительных устройств сигналов об определяемых ими величинах в качестве входных сигналов и вырабатывающим в зависимости от указанных входных сигналов управляющий сигнал на регулятор мощности для регулирования выходной мощности приводного двигателя. Устройство обработки данных и управления содержит блок памяти для хранения предельных величин максимальной допустимой мощности для по меньшей мере одного вспомогательного привода и для привода передвижения, а также хранения с возможностью изменения по меньшей мере одной максимальной предельно допустимой величины, такой как, например, крутящий момент, давление или расход, для отдельного вспомогательного привода и привода передвижения. Устройство обработки данных и управления выполнено с возможностью выработки управляющего сигнала для снижения выходной мощности или, соответственно, числа оборотов приводного двигателя при превышении установленной предельной величины по меньшей мере в одном из вспомогательных приводов и/или в приводе передвижения, на повышение выходной мощности или, соответственно, числа оборотов приводного двигателя выше номинального значения для повышения выходной мощности вместо снижения и с возможностью выработки сигнала на приведение выходной мощности приводного двигателя вновь в соответствие с новой допустимой предельной величиной мощности или до прежней величины при прекращении действия ограничивающего критерия. Обеспечение автоматического поддержания оптимального режима работы привода в различных режимах эксплуатации. 5 з.п. ф-лы, 4 ил.
Комментарии