Ортопедический аппарат - SU797682A1
Код документа: SU797682A1
Чертежи
Описание
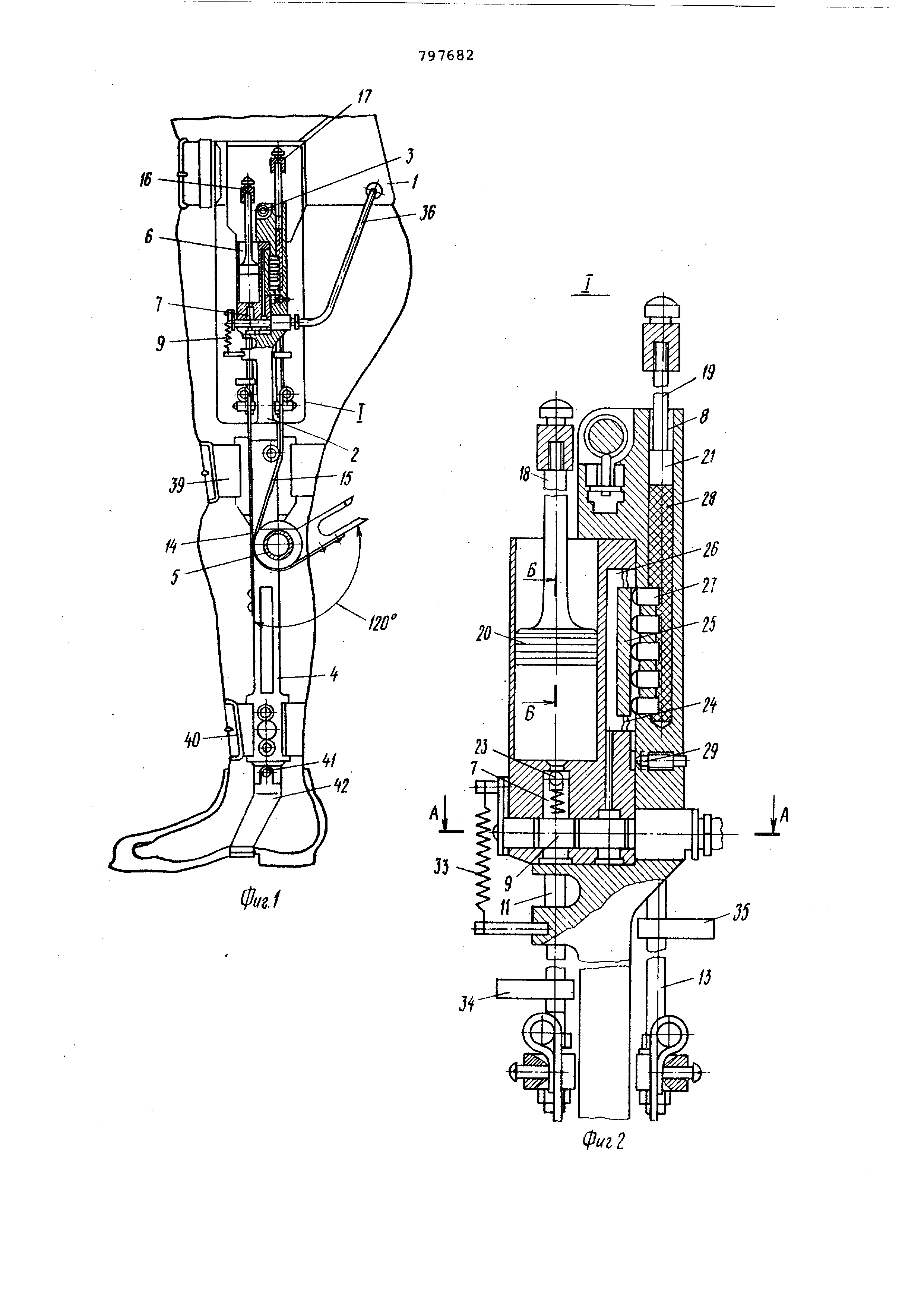
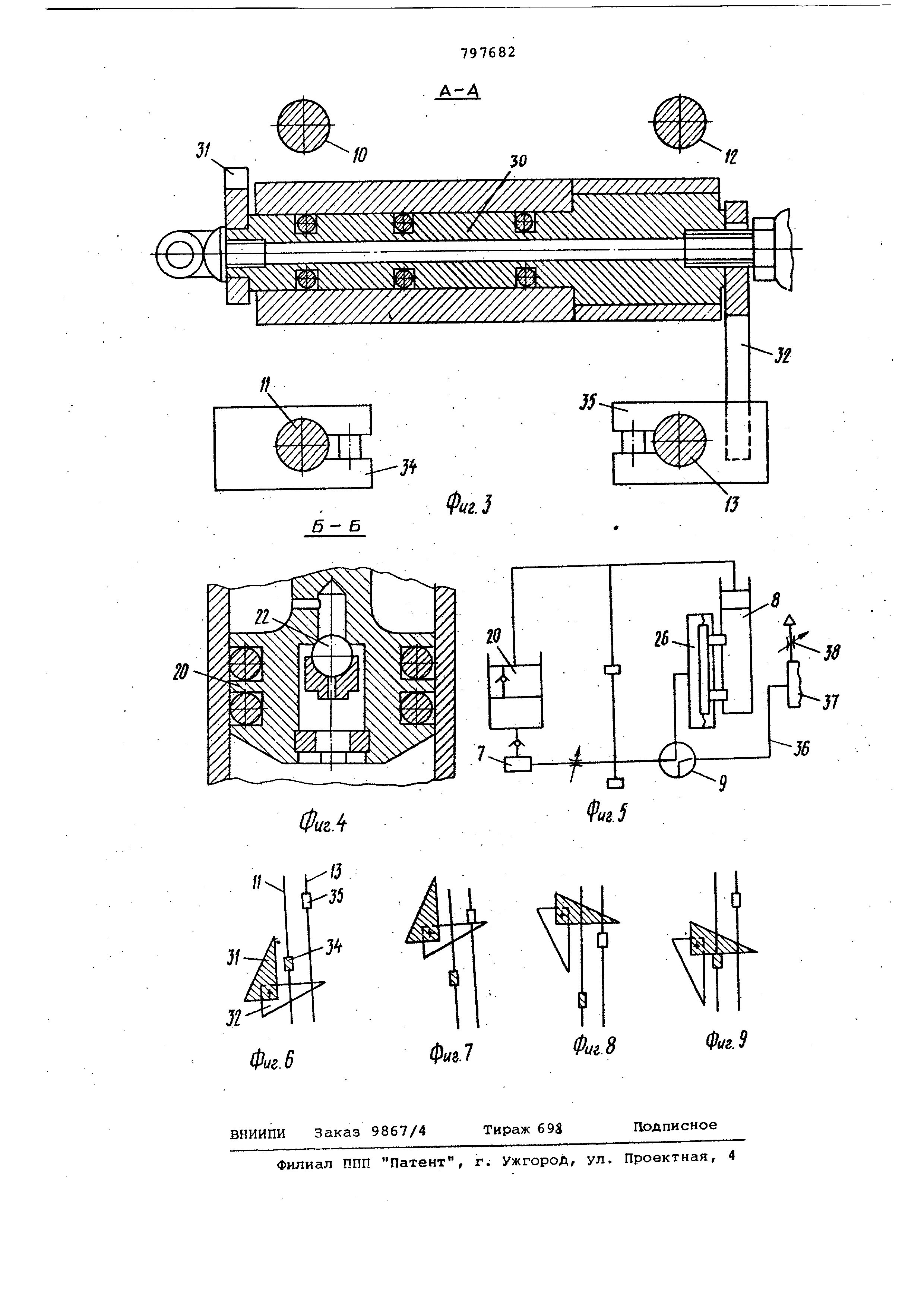
Изобретение относится к медицинской технике, а именно к протезам нижних конечностей. Известен ортопедический аппарат, содержащий жесткий полукорсет, шарнирно соединенные с ним при помощи тазобедренного, коленного и голеностопного шарниров накладные шины бедра, голени и стопы с элементоми крепления, а также коленный механизм 1 . Однако этот аппарат не обеспечивает подъем инвалида из положения применения внешнего источника энергии и управление подъемом без tnoMOщи рук, что ограничивает объем испо зования аппарата. Цель изобретения - обеспечение подъема инвалида из положения сидя в положение стоя без применения внешнего источника энергии и управление подъемом без помощи рук. Поставленная цель достигается те что в аппарате коленный механизм вы полнен в виде насоса с пневмоаккуму лятором и силового цилиндра с пневмопринодом , установленных в выто ке шины белра; насос и силовой ц линдр имеют штоки и соединены пневмомагистралью , в которой размещен золотник с плоскими подпружиненными кулачками, а на шинах - бедра и голени расположены последовательно соединенные гибкие и жесткие тяги, причем кониэ гибких тяг закреплены на шине голени, на жестких тягах установлены упоры, а концы жестких тяг соединены со штоками силового цилиндра и насоса при помощи коромысел. Кроме того, пневмопривод выполнен в виде гибкой мембраны с жестким центром и плунжеров, установленных с возможностью перемещения в стенке силового цилиндра. Кроме того, на полукорсете размещен ресивер, выполненный из эластичного материала,снабженный дроссельным клапаном и соединенный с пневмоприводе через золотник при помощи канала. На фиг.1 изображен ортопедический аппарат; на фиг.2 - укел 1 на фиг.1; на фиг.З - сечение А-А на фиг.; на фиг.4 - сечение Б-Б на фиг.2; на фиг.5 - принципиальная пневматическая схема аппарата; на фиг.6-9 - схема управления распределительным золотником. Аппарат содержит жесткий полукорсет 1, накладную шину 2 бедра, соединенную с полукорсетом 1 тазобедренным шарниром 3, накладную шину 4 голени, связанную с шиной 2 бедра коленным шарниром 5, и коленный механизм для привода коленного шарнира 5, размещенный в выточке шины 2 бедра и выполненный в виде пневматического поршневого насоса 6 с пневмоаккумулятором 7 и силового цилиндра 8, сообщающихся между собой через распределительный золотник 9. Шина 2 бедра и шина 4 голени соединены друг с другом системой жестких тяг 10-13 и гибких тяг 14 и 15, огибающих коленный шарнир 5. Нижние концы жестких тяг 10-13 стянуты в единый пекет, к которому прикреплены гибкие тяги 14 и 15, а-верхние концы жестких тяг соединены попарно посредством коромысел 16 и 17, к которы прикреплены штоки 18 и 19 поршней 20 21 соответственно пневматическо го насоса б и силового цилиндра 8, Нижние концы гибких тяг 14 и 15 закреплены на шине 4 голени. Пневматический насос 6 имеет впускной обратный клапан 22, размещенный в выточке поршня 20 насоса, а пневмоаккумулятор 7 - впускной обратный клапан 23. Скловой цилиндр 8 снабжен пневмоприводом , выполненнЕлм в виде гибкой мембраны 24 с жестким центром 25, образующей рабочую камеру 26 пневмопривода , и плунжеров 27, сообщающихся с замкнутой полостью 28 цилинд ра 8, заполненной вязкой жидкостью, например гидропластом. Для удаления избытка воздуха из рабочей камеры 26 пневмопривода служит предохранительный клапан 29. Для управления распределительным золотником 9 на противоположных концах оси 30 золотника 9 закреплены плоские кулачки 31 и 32, один из которых по меньшей мере подпружинен пружиной 33, а на жестких тягах 11 и 13 смонтированы управляющие упоры 34 и 35, расположенные относительно друг друга на разных уровнях с возможностью попеременного взаимодейстВИЯ с кулачками 31 и 32. Пневмопривод силового цилиндра 8 соединен через распределительный золотник 9 и трубопровод 36 с эластичным ресивером 37, закрепленным в спинной части полукорсета 1 и снабженным дроссельным клапаном 38,сообщающимся с атмосферой. Шина 2 бедра и шина 4 голени зак рюплены-на внешней стороне ноги инв лида с помощью ремней 39 и 40, а ши 4 голени, кроме того, соединена гол ностопным шарниром 41с накладной шиной 42 стопы. Аппарат работает следующим образом . При переходе из положения стоя в положение сидя шина 2 бедра поворачивается относительно шины 4 голени вокруг оси коленного шарнира 5, при этом гибкие тяги 14 и 15, огибая коленный шарнир 5, сообщают вертиальное перемещение жестким тягам 10-13, которые, в свою очередь, посредством коромысел 16 и 17 перемещат вниз штоки 18 и 19 поршней 20 и 21 соответственно пневматического насоса 6 и силового цилиндра 8. В процессе перемещения поршень 20 насоса 6 нагнетает сжатый воздух в пневмоаккумулятор 7 через обратный клапан 23, а поршень 21 силового цилиндра 8 воздействует через гидропласт на плунжеры 27, которые перемещают гибкую мембрану 24 с жестким центром 25 в рабочей камере 26 пневмопривода силового цилиндра 8, сообщающейся с эластичным ресивером 37 через золотник 9 и трубопровод 36. При посадке инвалид сохраняет такое положение, при котором угол между шиной 2 бедра и шиной 4 голени составляет примерно 90°. В этом положении поршни 20 и 21 насоса 6 и силового цилиндра 8 имеют определенный запас хода, распределительный золотник 9 закрыт, пневмоаккумулятор 7 не сообщается с рабочей камерой 26 пневмопривода силового цилиндра 8, а кулачки 31 и 32 не взаимодействуют с управляющими упорами 34 и 35, При этом, кулачок 31 занимает вертикальное положение (фиг.6), исключающее возможность его контакта с управляющим упором 34, закрепленным на тяге 11 в ее нижней части, а кулачок 32 занимает горизонтальное положение , располагаясь на пути перемещения управляющего упора 35, закрепленного на тяге 13 в ее верхней части. Для перехода из положения сидя в положение стоя инвалид наклоном туловища вперед переносит центр тяжести тела как можно ближе к коленному шарниру 5, при этом он как бы сползает со стула, перенося вес тела на ступни ног. В результате этого движения угол между шиной 2 бедра и шиной 4 голени уменьшается, гибкие тяги 14 и 15, продолжая огибать коленный шарнир 5, сообщают дальнейшее перемещение жестким тягам 10-13, до тех пор, пока не будет выбран запас хода поршней 20 и 21 насоса 6 и цилиндра б. Одновременно, верхний управляющий упор 35, перемещаясь вниз вместе с жесткой тягой 13, нажимает на кулачок 32, переводя золотник 9 в положение подъем (фиг.7 и 8). Сжатый воздух из пневмоаккумулятора 7 поступает по каналам золотника 9 в рабочую камеру 26 пневмопривода силового цилиндра 8 и воздейст вует на гибкую мембрану 24, которая своим жестким центром 25 перемещает плунжеры 27. Последние через гидрогшастовый наполнитель замкнутой полости 28 выдавливают шток 19 силово го цилиндра 8, который через систем тяг 12, 13 и 15 развивает крутящий момент в коленном шарнире 5, осуществляя разгибание ноги и подъем инВс1лида . Одновременно,.поршень 20 насоса 6, перемещаясь вверх посредством тяг 10 и 11, осуществляет забор воз духа через впускной обратный клапан 22, подготавливая очередной цикл на нетания воздуха в пневмоаккумулятор 7, в процессе подъема верхний управ ляющий упор 35 свободно проходит ми мо кулачка 32, занимающего вертикальное положение, а нижний управляющий упор 34 в конце подъема нажимает на подпружиненный кулачок 31, устанавливая золотник 9 в положение взвод (фиг.9). При этом сжатый воздух из рабочей камеры 26 пневмопривода силового цилиндра 8 через золотник 9 и трубопровод 36 поступает в эластичный ресивер 37, временно закрепляя поясницу инвалида, и в дальнейшем постепенно стравлива ется в атмосферу через дроссельный клапан 38. Предлагаемое изобретение исключает необходимость применения внешнего энергетического источника для подъема инвалида из положения сидя в положение стоя и, кроме того, обеспечивает управление подъе мом инвалида без помощи рук за счет наклона туловища и изменения угла между осями симметрии гильз бедра и голени, что является весьма существенным для безруких или инвалидов с дефектами кисти рук. При этом, изменение положения центра тяжести тела при посадке и подъеме инвалида относительно оси приводного коленного шарнира позволяет получить выигрьцл в силе и тем самым компенсироват потери на трение в механизмах протез Формула изобретения 1. Ортопедический аппарат, содержащий жесткий полукорсет, шарнирно соединенные с ним при помощи тазобедренного , коленного и голеностопного шарниров накладные шины бедра, голени и стопы с элементами крепления , а также коленный механизм, отличающийся тем, что, с целью обеспечения подъема инвалида из положения сидя в положение стоя без применения внешнего источника энергии и управления подъемом без помощи рук, коленный механизм выполнен в виде насоса с пневмоаккумулятором и силового цилиндра с пневмоприводом , установленных в выточке шины бедра насос и силовой цилиндр имеют штоки и соединены пневмомагистралью , в которой размещен золотник с плоскими подпружиненными кулачками , а на шинах бедра и голени расположены последовательно соединенные гибкие и жесткие тяги, причем концы гибких тяг закреплены на шине голени, на жестких тягах установлены упоры, а концы жестких тяг соединены со штоками силового цилиндра и насоса при помощи коромысел . . 2.Аппарат поп.1,отлича ющ и и с я тем, что пневмопривод выполнен в виде гибкой мембраны с жестким центром и плунжеров, установленных с возможностью перемещения в стенке силового цилиндра. 3.Аппарат по пп.1 и 2, о т л ичающийс я тем, что на полукорсете размещен ресивер, выполненный из эластичного материала, снабженный дроссельным клапаном и соединенный с пневмоприводом через золотник при помощи канала. Источники информации, принятые во внимание при экспертизе 1. Вукобратович М. Шагающие роботы и антропоморфные механизмы. ., Мир, 1976, с. 423-428.
Реферат
Формула
Комментарии