Протез руки с пневматическим приводом - SU377158A1
Код документа: SU377158A1
Чертежи
Описание
1
Изобретение относится к области медицины и касается ортопедических устройств, точ ,нее протезов руки с пневматическим приводом .
Протезы руки с пневматическим приводом, содержащие механизмы кисти, локтя, ротации , -источник питания « блок управления, известны . Эти протезы характеризуются недостаточной функциональной эффективностью.
Регулирование момента силы относительно оси механизма ротации и облегчение пользоеа-ния протезом обеспечивается за счет того, что блок управления с источником питания е нем, например в виде баллона, облицованного термопластом, установлен непосредственно в протезе и соединены между собой. В предлагаемом протезе руки с пневматическим приводом источник питания с одной стороны соединен с гильзой плеча посредством ротационных фланцев, с другой стороны - винтами с корпусом локтя, в котором помещен жестко Соединенный с баллоном блок управления, состоящий , например, из двух распределительных клапанов, управляющих пневматическими механизмами кисти и локтя, двух рычагов управления, свободно сидящих на оси и кинематически связанных с тяговым механизмом кисти и локтя, воздействующими одновременно на распределительные -клапаны и редуктор ,1сточника питания с возможностью управления подпружиненными рычагами посредством гибких тяг, соединенных с мыщечными источниками инвалида и исполнительными механизмами возврата рычагов в исходное положение и регулировки порогов срабатывания распределительных клапанов, а концы рычагов , воздействующих на распределительные клапаны, снабжены выступами и упругим элементом , выполненным по тнну рессоры и обеспечивающим дальнейший поворот рычагов для регулирования рабочего давления в редукторе путем подачи сжатого газа в .исполнительные мехаадзмы по каКа,лам корпуса блока управления и трубопроводам. Профилю
выступов придана форма рычагов, позволяющих изменять давление пропорционально углу поворота рычагов, а в гильзе предплечья установлен тяговый механизм ротации кисти. Кроме того, механизм активной ротации
кисти может быть выполнен в виде двухручьевого блока, соединенного подвижно с гильзой предплечья и кистью и несущего тягу, идущую к мышечному источнику инвалида, и вторую тягу, проведенную через направляющий блок
и пружинящий элемент .к оси локтевого шарнира с возможностью остановки пружинящего элемента посредством подпрулшненного стопора, снабженного профильным выступом под впадины торца кисти и опираемого на
подвижный кулачок, переключаемый с помощью второй руки или путем нажима на какой-либо предмет.
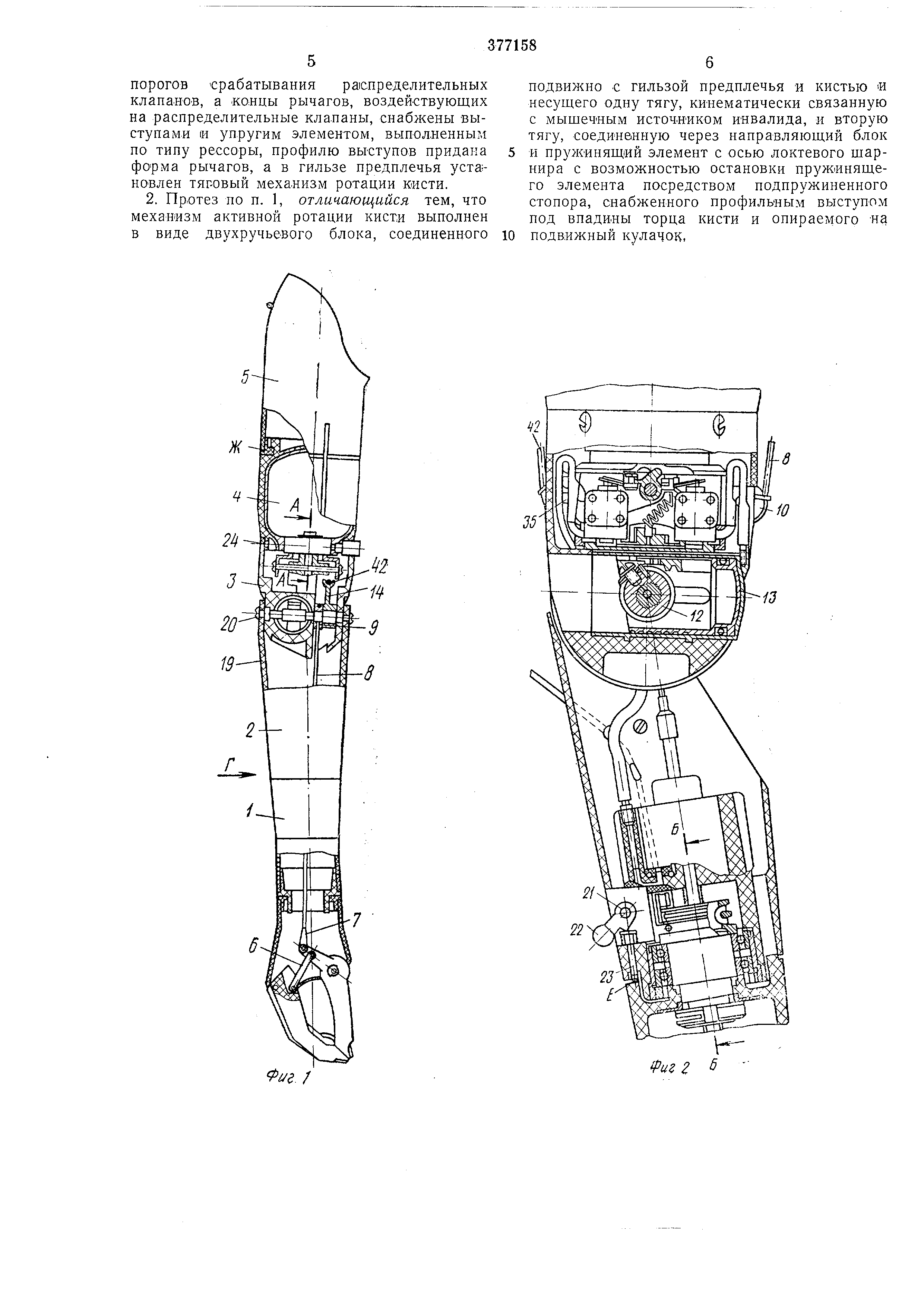
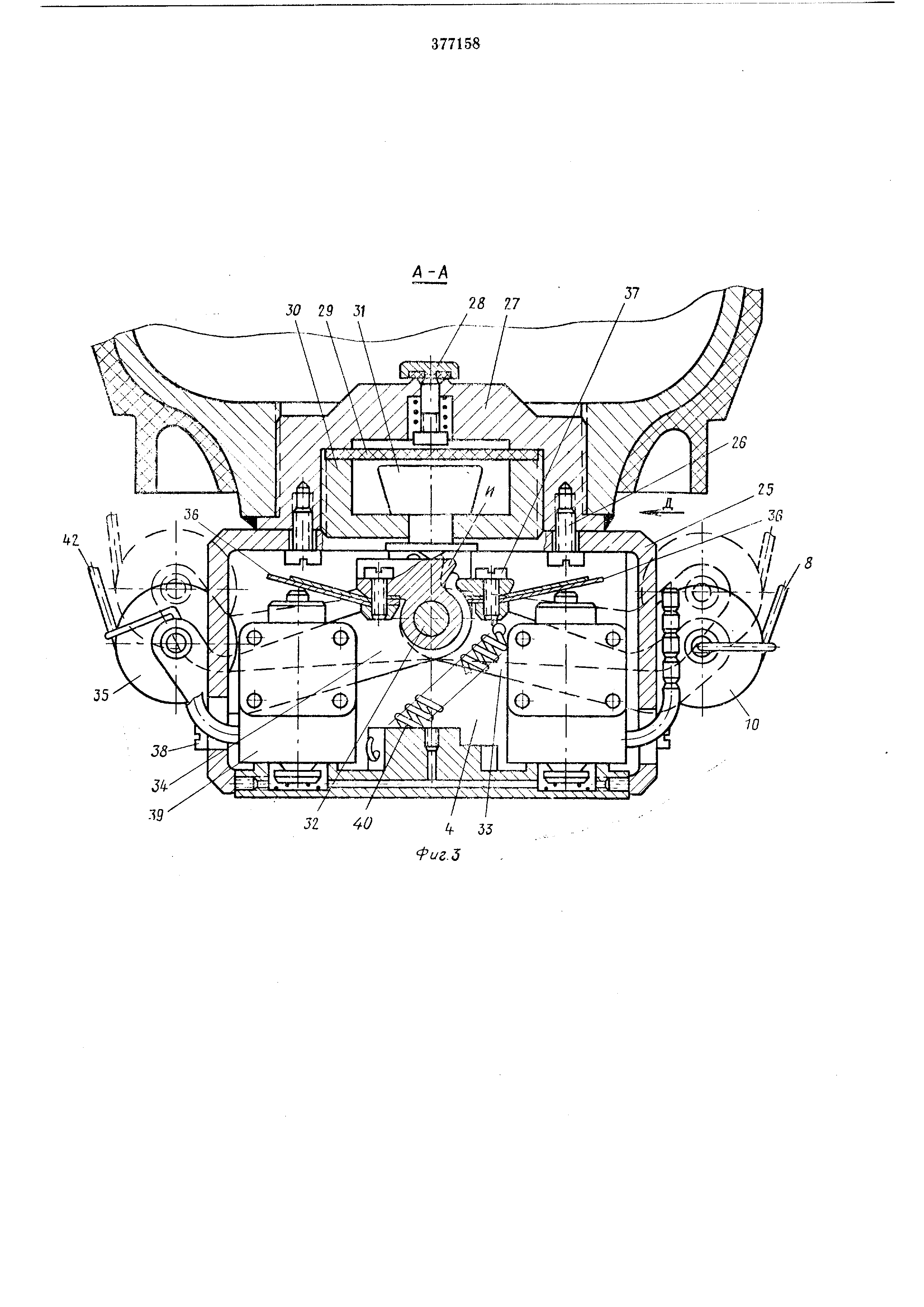
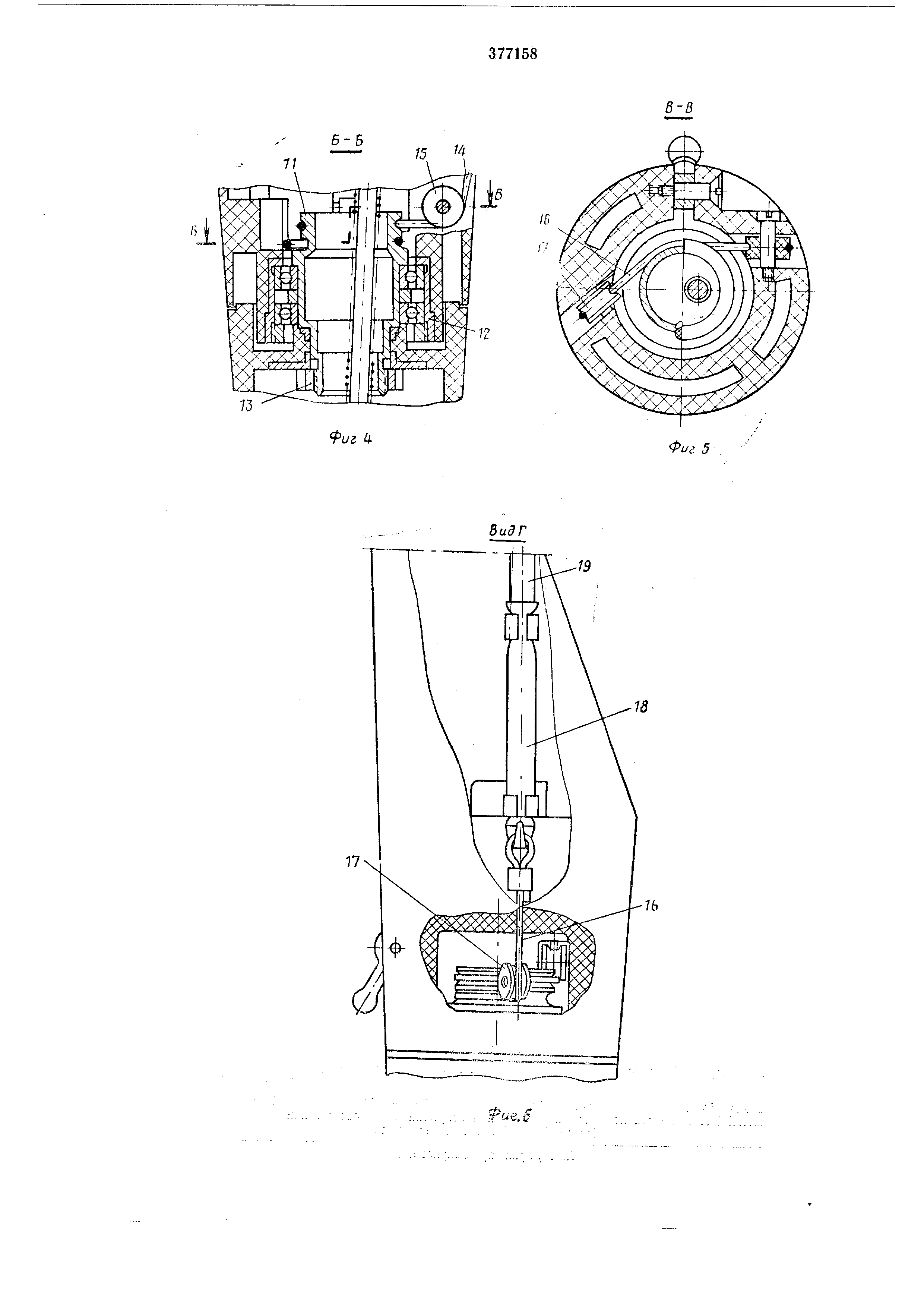
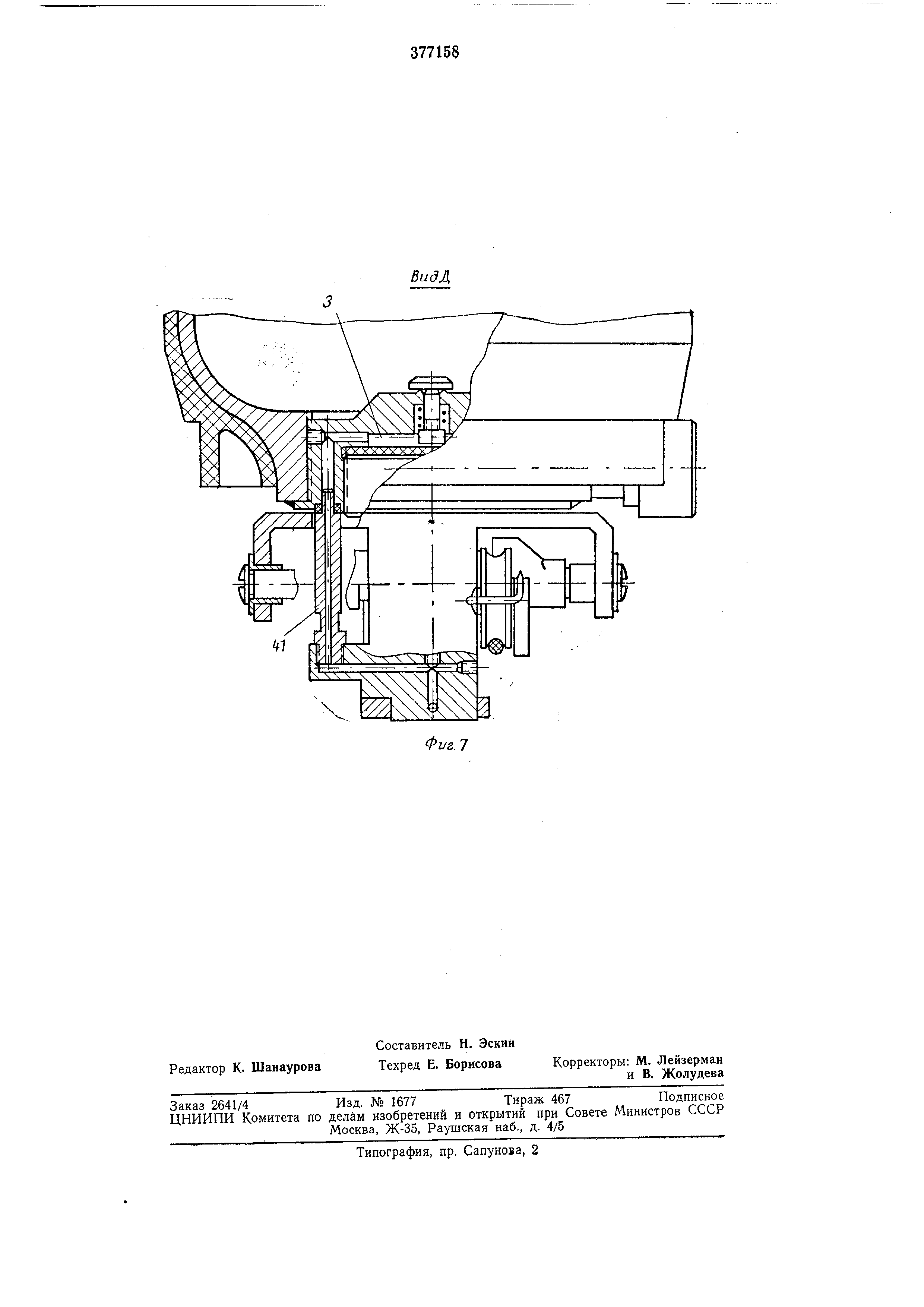
На фиг. 1 и 2 изображен протез руки с ПНевмат Ически1М приводом, общ«;й вид, две проекции, частичный разрез; на фиг. 3 - то же, разрез по Л-А на фиг. 1; на фиг. 4 - то же, разрез по Б-Б на фиг. 2; на фиг. 5 - то же, разрез по В-В на фиг. 4; «а фиг. 6 - вид по стрелке Г на фиг. 1; на фиг. 7 - вид по стрелке Д на фиг. 3.
Предлагаемый протез руки включает в себя кисть 1, предплечье 2 с вмонтироваиным в него пневматическим приводом и механизмом ротации кисти 1, локоть 3 со встроенными механизмами, источник питания с блоком 4 управления и гильзу плеча 5.
Пальцы кисти / шарнирно связаны между собой рычагом 6 и штоком 7, проходящим через встроенный е предплечье 2 пневматический усилитель. Другой конец штока 7 соединен с гибкой тягой 8, которая крепится на блоке 9 и огибает блок 10.
В предплечье 2 смонтирован механизм ротации кисти, выполненный в виде полого блока // с двумя канавками, установленного в подшипниках 12 и жестко овязанного с кистью 1 гайкой 13. По верхней канавке блока 11 проходит гибкая тяга 14 через блок /5 к источнику управления. Гибкая тяга 16 проходит по канавке через блок 17 и через упругий элемент Ii8 (например, резиновую тянку ), соединяется с крючком 19, сидящим на оси 20 локтевого шарнира. В корпусе предплечья 2 на оси 27 установлен .кулачок 22, упирающийся в подпружиненный фиксатор 23, который жестко связывает предплечье 2 с кистью /, находясь в специальных пазах Е, расположенных на торцовой поверхности кисти 1.
Источник питания с блоком 4 управления с одной стороны соединяются с помощью винта 24 с локтем 3, а с другой стороны - фланцевым соединением Ж с гильзой плеча 5. Корпус 25 блока 4 управления винтами 26 крепится к корпусу 27 редуктора, в котором установлен подпружиненный редуктор.ный клапан 28, разделительная мембрана 29, поджатая гайкой 30, в центральном отверстии которой установлен што-к 31. В корпусе 25 блока 4 управления на оси 32 установлены рычаги 33 и 34 управления механизмами кисти и локтя, причем на одном конце этих рычагов установлены свободно вращающиеся блоки 10 и
35,а с другой стороны - упругие элементы
36,зак|репленные винтами 37. В корпусе 25 блока 4 управления на винтах 58 закреплено распределительное устройство 59, на котором крепится возвратная пружина 40 рычагов 55 и 34 управления. Распределительное устройство 39 соединено специальным штуцером 41 с полостью 3 низкого давления корпуса 27 редуктора .
При воздействии на гибкие управляющие тяги 8 « 42 происходит их выборка: в механизме кисти / - до соприкосновения пальцев
один с другим или с предметом, а в механизме локтя 5 - до определенного поворота предплечья 2 относительно оси 20 локтевого шарнира.
Дальнейшее увеличение уровня управляющего воздействия на гибких тягах 8 « 42 приводит к повороту рычагов управления 55 и 34, которые переключают распределительное устройство 39 блока 4 управления. При этом полость пневмомоторов кисти / и локтя 2 сообщается либо с атмосферой, либо с полостью 5 низкого давления. Кроме того, рычаги 55 и 34 посредством профилированных выступов И воздействуют на шток 31. Размеры рычагов 55 и 34 и профиль выступа И выбраны так, чтобы выходное давление на редукторе было пропорционально усилию на гибких тягах 8 и 42. Таким образом, до определенных, заранее
заданных усилий на тягах 8 и 42, механизмы протеза работают как тяговые, а при увеличении уровня управляющего воздействия сверх порогового в действие вступает пневматический усилитель кисти / и пневмомотор
локтя 5.
Механизм ротации кисти 1 в описываемом протезе выполнен в виде тягового привода, который работает следующим образом. При воздействии на гибкую тягу 14 происходит
поворот полого блока 11 и связанной с ней жестко кисти /. Поворот полого блока // вызывает натяжение упругого элемента 18, посредством которого при уменьшении или снятии управляющего воздействия кисть / возвращается в исходное положение. Фиксация кисти 1 в требуемом положении производится пассивно кулачком 22, который вводит в зацепление подпружиненный фиксатор 25 со специальными пазами Е на торцовой поверхности кисти 1.
Предмет изобретения
1. Протез руки с пневматическим приводом,
содержащий механизмы кисти, локтя, ротации, источник питания и блок управления, отли чающийся тем, что, с целью обеспечения возможности регулирования момента силы относительно оси механизма ротации, а также облегчения пользования протезом, блок управления с источником питания и механизм активной ротации кисти установлены непосредственно в протезе, блок управления содержит два распределительных клапана, управляющих пневматическими механизмами кисти и локтя, два рычага управления, свободно сидящих на оси и кинематически связанных с тяговыми механизмами кисти и локтя, воздействующими одновременно nai распределительные клапаны и редуктор источника питания с возможностью управления подпружиненными рычагами посредством гибких тяг, соединенных с мышечными источниками инвалида и исполнительными механизмами возврата рычагов в исходное положение и регулировки порогов срабатывания раетределительных клапанов, а -концы рычагов, воздействующих на распределительные клаланы, снабжены выстунам .и и упругим элементом, выполненным по типу рессоры, профилю выступов придана форма рычагов, а в гильзе предплечья установлен тяг-овый механизм ротации кисти. 2. Протез по п. 1, отличающийся тем, что механизм активной ротации кисти выполнен механизм активной jJUluUnn l ni-l:n J.-. в виде двухручьевого блока, соединенного . .f г, ,r ft ri/ QnTJTjrOTJf и.П Р о
Г.
2
10
Фиг г в подвижно с гильзой предплечья и кистью « несущего одну тягу, кинематически связанную с мышечным источником инвалида, и вторую тягу, соединенную через направляющий блок и пружинящий элемент с осью локтевого щарнира с возможностью остановки пружинящего элемента посредством подпружиненного стопора, снабженного профильным выступом под впадины торца кисти и опираемого яа ..---., подвижный кулачок,
Б-6
15 Ц.
Фиг 5
Реферат
Формула
Комментарии