Пневматический протез руки - SU520105A1
Код документа: SU520105A1
Чертежи



Описание
(54) ПНЕВМАТИЧЕСКИЙ ПРОТЕЗ РУКИ


Реферат
Формула
1
Изобретение относится к медицинской технике,
а именно к протезам верхних конечностей.
Известен пневматический протез руки, содержащий
гильзу плеча, источник питания, пневмоприводы плеча, кисти и лучезапястого шарнира, блок управления
и тяги. Однако число активных функций протеза ограничено.
С делью увеличения числа активных функций, утгравляемых от одной тяги, и удобства манипуляции
при схвате и переносе предметов протезом, а также для уменьшения веса конструкции и упрошения технологии
изготовления,протез снабжен пневмоавтоматическим переключателем с возможностью последовательного
включения пневмоприводов кисти и лучезапястного шарнира по определенной программе, вьшолненным
в виде установленного в корпусе на двух JTHIOTнительных элементах, например резиновых кольцах,
плунжера, поджатого пружиной при помощи регулировочного винта. Пневмопривод лучезапястного шарнира
вьшолнен в виде привода одностороннего дейсгВИЯ , связанного с фланцем кисти осями., с возможностью
шарнирного соединения поршня и цилиндра с фланцем кисти.
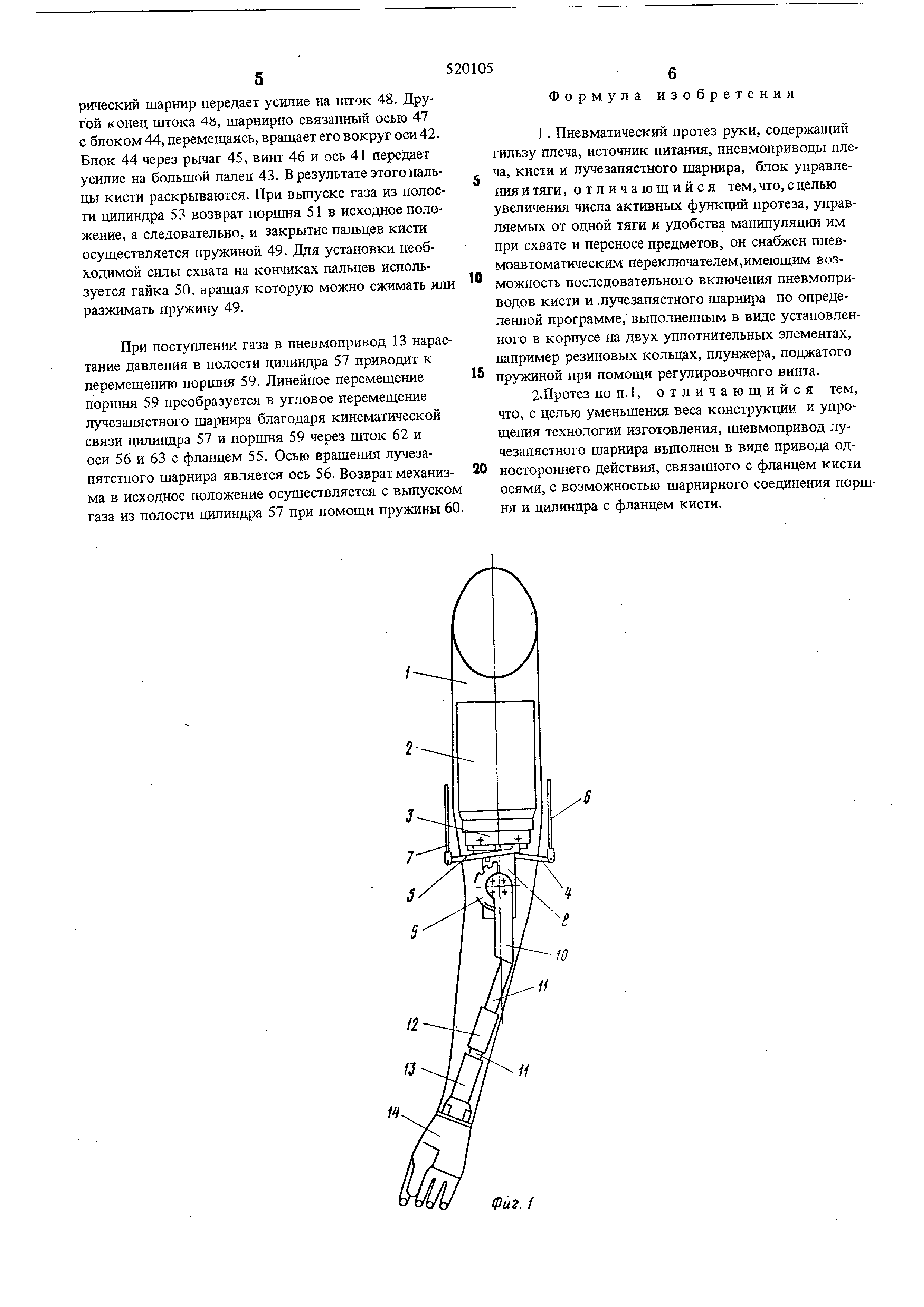
На фиг. 1 изображен пневматический протез руки , общий вид; на фиг. 2 -блок управления пневмопривода плеча в разрезе; на фиг. 3 - пневматический переключа1е71Ь с управляющим рычагом пневмопривода
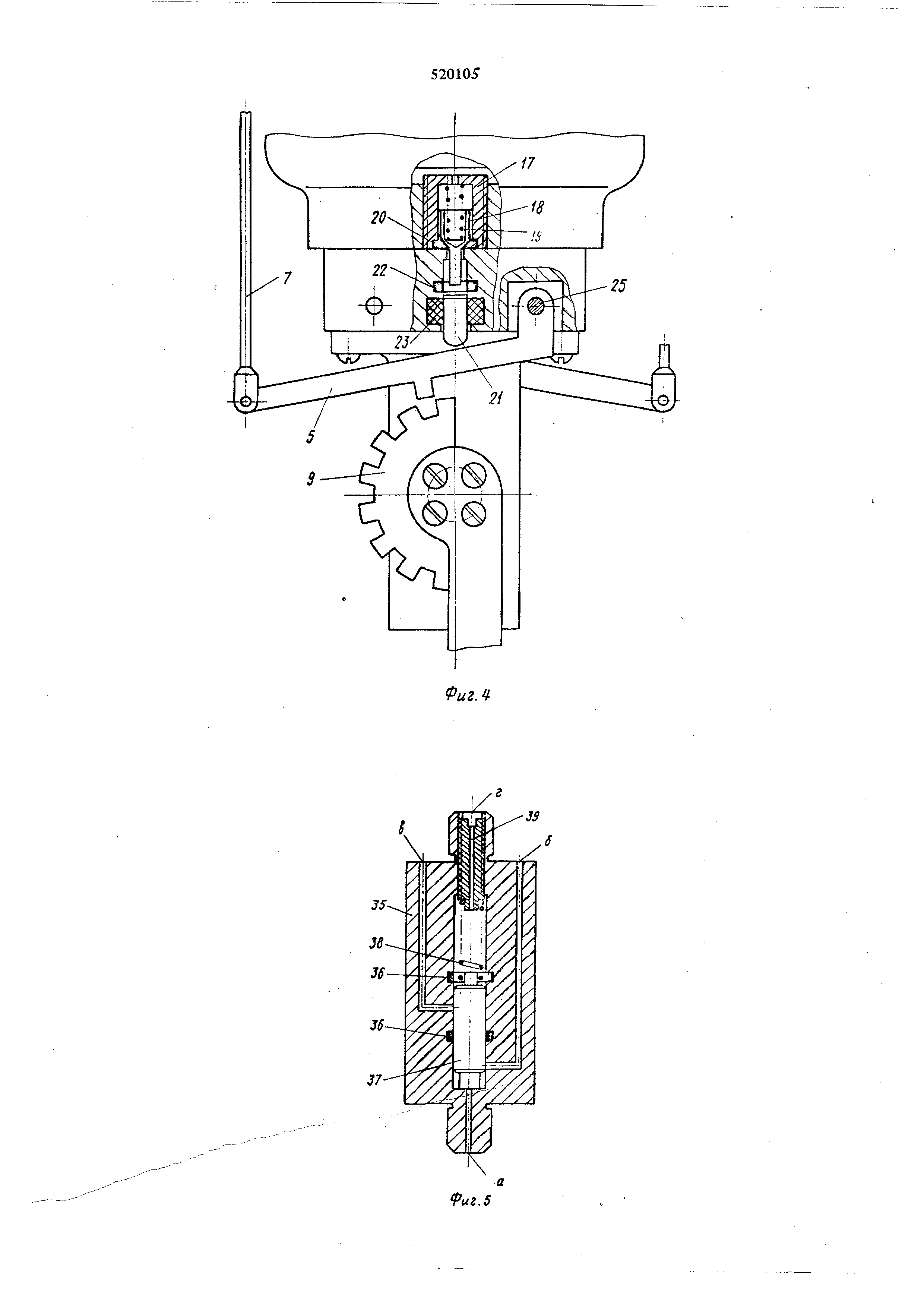
кисти; на фиг. 4 - пневматический пере слючатель с управляющим рычагом пневмопривода плеча;
на фиг. 5 - пневмоавтоматический переключа гея t,; на фиг. 6 - кисть с лучезапястным шарниром.
Пневматический протез руки содержит жестко связанные между собой гильзу 1 плеча (см. фиг. 1),
блок питания 2, блок управ1;-.-шш 3 с зттравляющими рьиагами 4 и 5 и тягами о и 7, пневмопривод 8 плеча
с зубчатым сектором 9, к которому прикреплена скоба 10, связанная посредством соединительный втулок
11 с пневмоавтоматическим переключателем 12 и пневмоприводом 13 лучезапястного шарнира, кинематически
связанного с пневмоприводом 14 кисти
Блок 3 связан с блоком 2 (см. фиг. 2) резьбовым
соединением с упло iнительной прокладкой 15 и представляет собой корпус 16, в котором установлены
два пневматических переключателя, содержашрих клапан впуска. Последний состоит из крышки 17,
штока 18с пружиной 19, уплотнительного элемен т 20, штока 21, зластичного уплотнительного элемента
22 и глушителя 23, представляющего собой полость , заполненную пористым материалом. В корпусе 16 закреплены рычаг управления 4 (см. фиг. 3) на оси 24 и рычаг 5 yin н 1ения (см. фиг. 4) на
оси 25. В цилиндре 26 пневмопривода 8 локтя (см. фиг. 2) перемещается поршень 27 с уплотнител
ным элементом 28 и зубчатой рейкой 29, находящейся в зацеплении с зубчатым колесом на оси 30,
вращающейся в подщипниках 31. На оси 30 посредством щпоночного соединения неподвижно установлен
зубчатый сектор с прикрепленными к нему СКОРОЙ 10 и соединительной втулкой 11, жестко связанной
с пневмоавтоматическим переключателем 12 В цилиндре 26, оси 30, скобе 10 и соединительной
втулке 11 вьшолнены каналы для подвода газа к пневмоавтоматическому переключат,елю 12. Уплот
нение в местах сопряжения деталей обеспечено прокладкой 32, уплотнительными кольцами 33 и прокладкой 34.
В корпусе 35 пневмоавтоматического переключателя 12 (см. фиг. 5) установлены уплотпительные
резиновые кольца 36, плунжер 37, пружина 38, поджатая винтом 39.
Пневмоприводы 13 и 14 выполнены в корпусе 40 (см. фиг. 6), где установлены на осях 41 и 42
соответственно большой палец 43 и блок 44 I1-V -го пальцев, кинематически связанные между собой
рычагом 45, винтом 46 и осью 47. На последней так же установлен шток 48, конец которого вьшолнен
в виде сферического щарнира и связан с пружиной 49, поджатой гайкой 50, и с порщнем 51, установленным
на уплотнительном резиновом кольце 52 в цилиндре 53. Последний жестко связан благодаря винту 54
с фланцем 55. На оси 56 установлен направляющий цилиндр 57, в котором на уплотнительном резиновом
кольце 58 установлен порщень 59, поджатый пружиной 60 через гайку 61 и сферический шарнир штока
62. Нижний конец штока 62 шарнирно связан с осью 63, установленной в фланце 55.
Пневматический протез руки работает следующим образом. Выбирая тягу 6 (см. фиг. 3), инвалид
поворачивает рычаг 4 вокруг оси 24 и толкает шток Последний, входя с натягом в уплотнительный элемент
22, перекрывает клапан выпуска. При дальнейшем движении шток 21 поднимает шток 18. Открывается
клапан вауска, и сжатый газ через отверстие в крышке 17 и кольцевой зазор между штоком 18
и уплотнительным элементом 20 подается в полость между клапанами и далее через каналы в корпусе
16, цилиндре 26, оси 30, скобы 10 и втулки 11 (см. фиг. 2), через отверстие О. (см. фиг. 5) - в
пневмоавтоматический переключатель 12 и далее через отверстие 5 в пневмопривод 14. При небольшом
отпускании тяги 6 (см. фиг. 3) шток 18 под действием пружршы 19 опускается на элемент 20, и клапан
впуска закрьшается. Так как клапан выпуска газа остается перекрытым, то газ, находящийся в
пневмоприводе, обеспечивает фиксацию пальцев кис ти. Усилие на тяге при этом соответствует силе давления
газа на шток 21 и пропор1шонально давлению газа в пневмоприводе, а следовательно, и величине
раскрытия кисти. При отпускании тяги 6 шток 21 под действием давления сжатого газа выходит из
элемента 22 и газ вьшускается из пневмопривода в атмосферу через глушитель 23.
Аналогично действует пневматический переключатель , управляющий пневмоприводом 8 плеча.
Отличие в том, что при выборке тяги 7 (см. фиг. 4) зуб рычага 5 сначала расцепляется с зубчатым сектором
9 и только после этого начинает толкать шток 21, который, войдя в уплотпительный элемент 22, перек
рывает клапан выпуска газа и далее поднимает шток 18, открывая клапан впуска Газ от источника
питания через кольцевой зазор между штоком 18 и элементом 20 подается в полость между клапанами
и по каналу в корпусе 16 - в цилиндр 26. Порщень 27 перемещается под давлением сжатого газа,
поворачивая ось 30 и связанную с пей конструкцию предплечья. При небольщом отпускании тяги, когда
шток 18 (см. фиг. 4) опускается па уплотнительный элемент 20, клапаны впуска и выпуска перекрыты
. Сжатым газом в пневмоприводе обеспечивается фиксация сгибания в локте, причем усилие на
гяге пропорционально силе давления газа на поршень механизма локтя, а следовательно, - нагрузке на
предплечье. Отпуская тягу 7 с небольшой скоростью (при этом шток 21 под действием силы давления
газа выходит из уплотнительного элемента 20), инвалид может регулировать скорость и угол разгибания
локтя. При быстром и полном отпускании тяги 7 зуб рычага 5 входит в зацепление с зубчатым сектором
9, и угол сгибапия фиксируется. Пневмоавтоматический переключатель 12
(см. фиг. 5) управляет работой лучезапястного следующим образом. Выбирая тягу 6 (см.фиг 1),
инвалид включает впускной клапан и подает газ через отверстие а в пневмоавтоматический переключатель
12 и далее через отверстие (5 - в пневмопривод 14. По мере нарастания давления в системе плунжер
37 перемещается до тех пор, пока давление не достигнет значения, при котором пневмопривод кисти
сработает полностью. При этом плупжер 37 выходит из нижнего )шлотнительного резинового кольца
36 и входит в верхнее кольцо 36. Газ из системы , питающей пневмопривод кисти через отверстие
б поступает в лучезапястный шарнир. При выпуске газа из системы давление снижается
, и плунжер 37 под действием пружины 38, сила которой регулируется винтом 39, перемещается
в исходное положение. В начальной стадии движения плунжер 37 входит в оба уплотнительных
кольца 36, а газ, поступивший в пневмопривод 13, остается в нем. Таким образом, и лучезапястпый
шарнир остается в заданном положении. При окончательном снижении давления в системе
, когда механизм кисти возвратился в исходное положение, плунжер 37 под действием пружины 38
выходит из верхнего уплотнительного резинового кольца и газ из пневмопривода 13 вьшускается через
отверстие t в атмосферу. При подаче газа в пневмопривод 14 нарастание
давления в полости цилиндра 53 (см. фиг. 6) приводит к перемещению поршня 51, который через сферический шарнир передает усилие на шток 48. Другой конец штока 48, шарнирно связанный осью 47
с блоком 44, перемещаясь, вращает его вокруг оси 42. Блок 44 через рычаг 45, винт 46 и ось 41 передает
усилие на большой палец 43. В результате этого пальцы кисти раскрываются. При выпуске газа из полости
цилиндра 53 возврат поршня 51 в исходное положение , а следовательно, и закрытие пальцев кисти
осуществляется пружиной 49. Для установки необходимой силы схвата на кончиках пальцев используется
гайка 50, вращая которую можно сжимать или разжимать пружину 49.
При поступлении газа в пневмопривод 13 нарастание давления в полости цилиндра 57 приводит к
перемещению поршня 59. Линейное перемещение поршня 59 преобразуется в угловое перемещение
лучезапястного шарнира благодаря кинематической связи цилиндра 57 и поршня 59 через шток 62 и
оси 56 и 63 с фланцем 55. Осью вращения лучезапятстного шарнира является ось 56. Возврат механизма
в исходное положение осуществляется с выпуском газа из полости цилиндра 57 при помощи пружины 60
Формула изобретения
1. Пневматический протез руки, содержащий
гильзу плеча, источник питания, пневмоприводы плеча , кисти и лучезапястного шарнира, блок управления
и тяги, отличающийся тем, что, с целью Звеличения числа активных функций протеза, управляемых
от одной тяги и удобства манипуляции им при схвате и переносе предметов, он снабжен пневмоавтоматическим
переключателем,имеющим возможность последовательного включения пневмоприводов
кисти и .лучезапястного щарнира по определенной программе, выполненным в виде установленного
в корпусе на двух уплотнительных элементах, например резиновых кольцах, плунжера, поджатого
пружиной при помощи регулировочного винта.
2Лротез ПОП.1, отличающийся тем,
что, с целью уменьшения веса конструкции и упрощения технологии изготовления, пневмопривод лучезапястного
щарнира вьтолнен в виде привода одностороннего действия, связанного с фланцем кисти
осями, с возможностью щарнирного соединения поршня и цилиндра с фланцем кисти.
tpuZ.f
-ш;
56
0
Фиг. 5
Комментарии