Способ определения калибровочных данных для датчика потерь зерна - RU2632896C2
Код документа: RU2632896C2
Чертежи

Описание
Область техники
Настоящее изобретение относится к способу определения калибровочных данных для датчика потерь зерна на зерноуборочном комбайне, обладающему признаками ограничительной части пункта 1 формулы изобретения.
Уровень техники
При эксплуатации зерноуборочного комбайна потерями зерна считаются зерна, которые либо не были выделены из принятого потока убранной массы на молотильном устройстве, либо, хотя и были выделены на молотильном или очистном устройствах, не были транспортированы, как это желательно, в зерновой бункер, а вместе с обмолоченной соломой были оставлены на поле. Эти по возможности минимальные потери зерна зависят, с одной стороны, от скорости движения и настройки эксплуатационных параметров в особенности молотильного устройства и, с другой стороны, от внешних условий, таких как характеристики убираемой массы и поля, например, в отношении влажности и густоты растительности. Таким образом, не существует неизменной и оптимальной настройки молотильного устройства для всех предельных условий, а для снижения или сведения к минимуму потерь зерна настройка должна производиться в соответствии с указанными внешними условиями и скоростью движения.
В то же время, как правило, существуют экономические нормы в отношении максимальных потерь зерна, которые не должны превышаться при уборке поля и которые выражаются в виде доли от общего собранного зерна или в другой размерности. При этом дополнительно часто бывает экономически целесообразно или требуется при максимальных потерях зерна снизить до минимума продолжительность уборки, - что возможно, например, посредством повышения скорости, - или снизить энергопотребление молотильного устройства, причем обе эти задачи создают целевой конфликт с потерями зерна. Таким образом, водитель комбайна, как правило, стремится эксплуатировать комбайн близко к предельной заданной величине потерь зерна.
При этом до сих пор остается затруднительным важное для такой настройки определение действительных потерь зерна в процессе уборки. С одной стороны, из уровня техники известен способ, когда водитель зерноуборочного комбайна или вспомогательный работник на поле качественно определяет толщину или количество оставленных зерен среди оставленной соломы и половы. Понятно, что такой способ трудоемок и неточен, а изменение настройки комбайна в соответствии с новым измерением занимает много времени. Некоторое улучшение этого принципа вносит использование контрольных емкостей для приема потерь зерна, которые либо отделяются от комбайна в определенные моменты времени, либо укладываются вручную вспомогательным работником для приема потерь зерна.
Из уровня техники также известны расположенные на комбайне датчики потерь зерна, которые установлены, например, в окрестности клавиш соломотряса молотильного устройства и на основе воспринимаемых ударов падающих вниз зерен должны определять потери зерна. Здесь и в дальнейшем под понятием потерь зерна следует понимать либо абсолютную величину потерь зерна, выраженную, например, в объеме зерна или в массе зерна на единицу площади, либо относительную величину, отнесенную к другой величине.
При использовании датчиков потерь зерна проблема состоит в том, что трудно установить отношение между величинами, измеренными датчиком потерь зерна, и действительными потерями зерна. Причина заключается в том, что отношение между величинами потерь зерна, измеренными датчиком, - которые здесь и в дальнейшем называются измеренными датчиком величинами потерь зерна и обозначают генерируемый датчиком измерительный сигнал как таковой, - и действительными потерями зерна очень сильно зависит как от объема потока убранной массы, так и от упомянутых условий среды, что делает трудной калибровку датчиков потерь зерна для определения действительных потерь зерна.
В наиболее близком решении по патенту DE 19820819 С2 описана возможность калибровки датчиков потерь зерна путем оценки упомянутых контрольных емкостей, однако очень неточное соотношение измеренных датчиком величин потерь зерна с оценкой контрольных емкостей ограничивает точность калибровки. Кроме того, способ занимает много времени.
Раскрытие изобретения
На основе уровня техники задачей настоящего изобретения является создание способа определения улучшенных калибровочных данных для датчика потерь зерна на зерноуборочном комбайне.
Решение указанной проблемы обеспечивается способом определения калибровочных данных для датчика потерь зерна на зерноуборочном комбайне, обладающем признаками ограничительной части пункта 1 формулы изобретения, посредством признаков отличительной части пункта 1.
Существенным для изобретения является знание того, что калибровка датчика потерь зерна может выполняться особенно точно в том случае, когда измеренные датчиком величины потерь зерна могут быть сопоставлены с действительно установленными потерями зерна. Другими словами, когда может выполняться измерение действительных количеств потерь зерна, - на поле под оставленной соломой и половой или в контрольной емкости, - и это измерение может быть соотнесено с соответствующими величинами измерения датчиком, то есть с измеренными датчиком величинами потерь зерна. При этом к измеренной датчиком величине потерь зерна может быть привязана действительная потеря зерна, благодаря чему могут быть определены желаемые точные калибровочные данные для датчика потерь зерна. Соотнесение измеренного количества потерь зерна с измеренной датчиком величиной потерь зерна может выполняться с помощью мерных отметок, которые присвоены как количеству потерь зерна, так и измеренной датчиком величине потерь зерна и указывают положение или время, что допускает их взаимное соотнесение.
При этом предпочтительные примеры осуществления по зависимым пунктам 2 и 3 формулы изобретения относятся к калибровке для определения процентной доли потерь в общей производительности зерноуборочного комбайна по зерну.
В зависимых пунктах 5 и 6 предусмотрено, что мерные отметки для взаимного соотнесения измеренных датчиком величин потерь зерна с измеренными количествами потерь зерна содержат информацию положения о положении зерноуборочного комбайна. С помощью такой информации положения измеренные величины могут быть соотнесены не только друг с другом, но также и с положением на поле. Это дает преимущества, так как существенные полевые характеристики могут быть различными также и в зависимости от положения, так что калибровочные данные могут быть зависящими от положения, как это специально учитывается в пункте 7 формулы изобретения.
Предпочтительно, пример осуществления в соответствии с зависимым пунктом 8 предусматривает использование в мерной отметке информации времени, что может дополнительно повышать точность соотнесения.
В соответствии с зависимым пунктом 10 определение калибровочных данных может выполняться в центральном процессоре, который предпочтительно может быть расположен стационарно и отдельно от зерноуборочного комбайна и на который могут передаваться данные измерений. При этом может быть центрально связано множество данных и в определенных случаях распределено на несколько зерноуборочных комбайнов, как это описано в зависимом пункте 15. Здесь следует отметить, что в принципе термин «центральный процессор» трактуется в широком смысле, при этом он может быть расположен в любом месте и выполнен, в частности, в виде мобильного аппарата, в частности в виде смарт-аппарата или подобного устройства.
И наконец, зависимые пункты 13 и 14 формулы изобретения предусматривают использование контрольной емкости для измерения количеств потерь зерна.
Краткое описание чертежей
Другие особенности, признаки, задачи и преимущества изобретения будут описаны на предпочтительном примере осуществления со ссылками на прилагаемые чертежи. На чертежах:
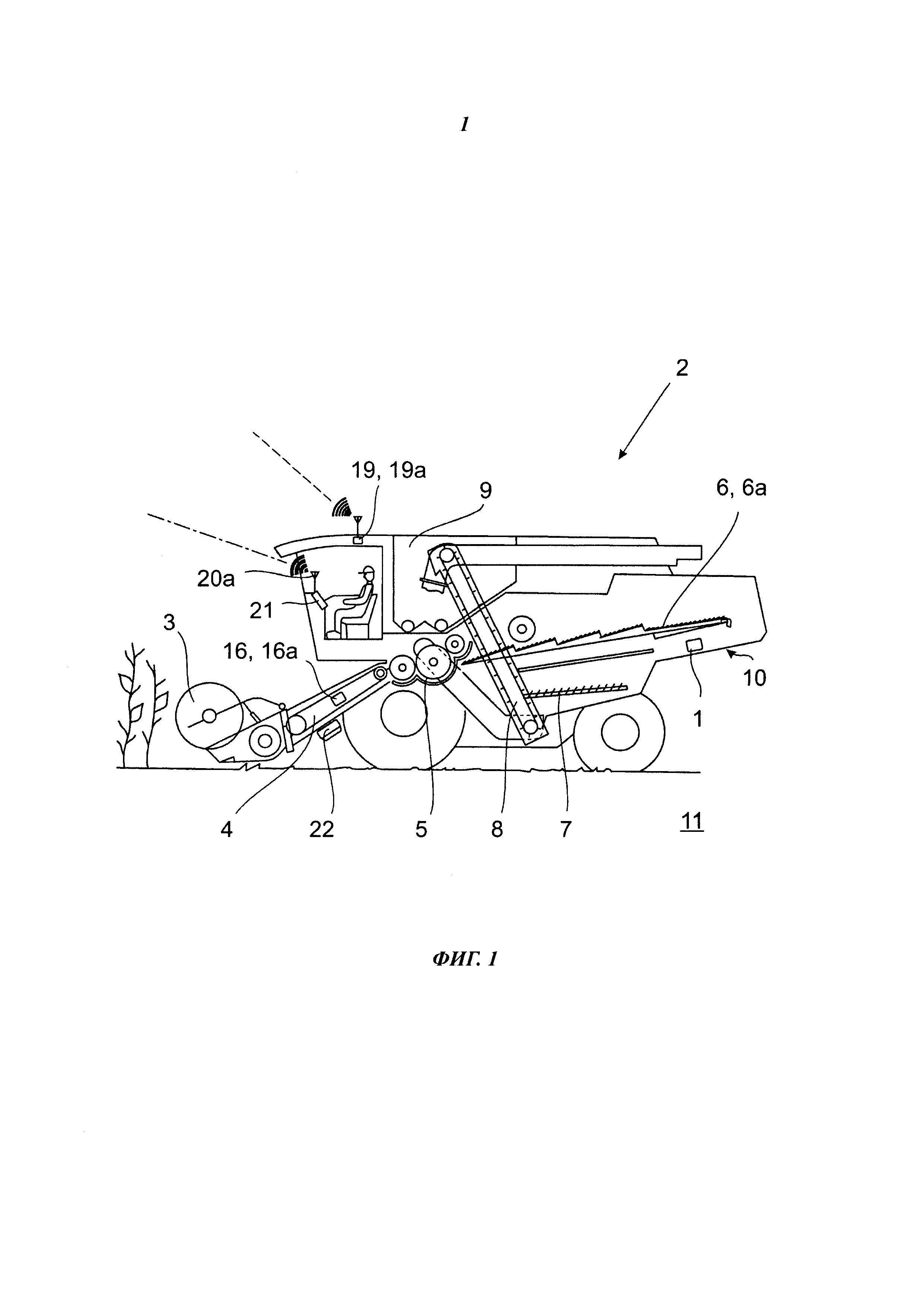
фиг. 1 схематично изображает на виде сбоку зерноуборочный комбайн для осуществления предлагаемого способа,
фиг. 2 схематично изображает вид поля при обработке зерноуборочным комбайном во время уборки и осуществления предлагаемого способа,
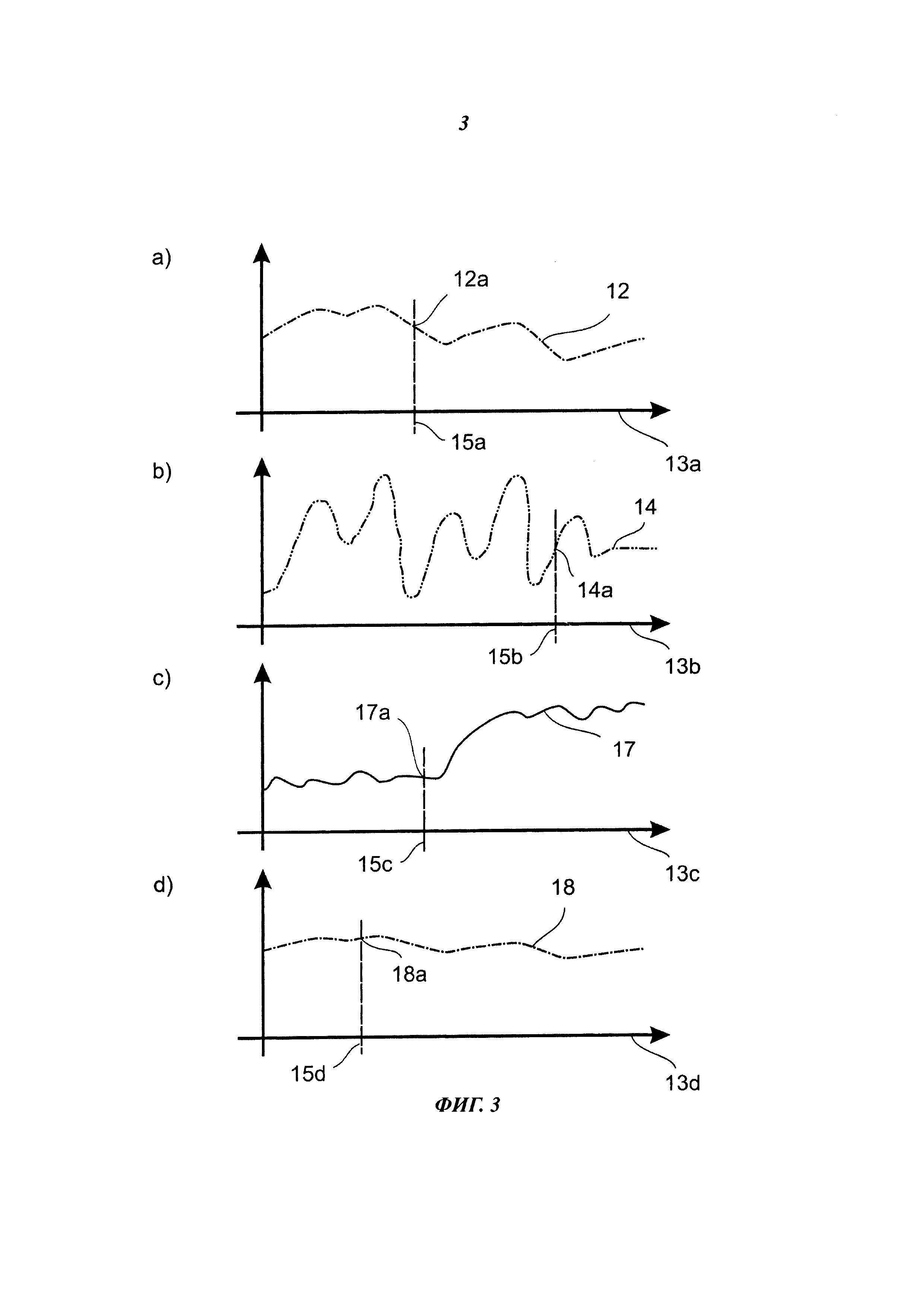
фиг. 3 изображает в качестве примера диаграммы измерений при осуществлении предлагаемого способа.
Осуществление изобретения
Предлагаемый способ служит для определения калибровочных данных для датчика 1 потерь зерна на зерноуборочном комбайне 2. Зерноуборочный комбайн 2 схематично показан на виде сбоку на фиг. 1. Как это известно из уровня техники, зерноуборочный комбайн 2 содержит жатвенный аппарат 3, наклонный питатель 4, молотильное устройство 5, сепарирующее устройство 6, очистное устройство 7, транспортирующее устройство 8 и зерновой бункер 9, причем принятый поток убранной массы или зерновой поток проходит эти устройства в зерноуборочном комбайне 2, по существу, в указанной последовательности.
Точнее говоря, в молотильном устройстве 5 и сепарирующем устройстве 6 зерновая масса в основном отделяется от убранной массы, при этом в очистном устройстве 7 отделенная зерновая масса подвергается очистке от половы и других не содержащих зерна фракций, а затем очищенная зерновая масса посредством транспортирующего устройства 8 подается в зерновой бункер 9. Солома и полова подаются в заднюю часть 10 зерноуборочного комбайна 2, сходят с соответствующего конца сепарирующего устройства 6, которое может содержать продольные клавиши 6а соломотряса, и выгружаются из зерноуборочного комбайна 2 на поле 11. В качестве примера положение зерноуборочного комбайна 2 на поле схематично показано на виде сверху на фиг. 2.
Датчик 1 потерь зерна, о котором здесь идет речь, в принципе известен из уровня техники и здесь подробно не показан. В качестве примера датчик 1 потерь зерна, расположенный согласно изображению на фиг. 1 на заднем конце сепарирующего устройства 6 под клавишами 6а соломотряса, содержит лист датчика и датчик вибрации, воспринимающий удары от зерен, которые падают вниз с клавиш 6а соломотряса и попадают на лист датчика. Датчик 1 потерь зерна может также содержать многокомпонентную систему датчиков, работающих по описанному или по другому принципу измерения. Эти компоненты системы датчиков могут быть распределены вдоль описанного пути потока, в частности вдоль молотильного устройства 5 и сепарирующего устройства 6. Компоненты системы датчиков могут быть также расположены поперечно пути потока, то есть поперечно продольному направлению зерноуборочного комбайна 2 на расстоянии друг от друга.
В предлагаемом способе измеряют количества 12 потерь зерна в зерноуборочном комбайне 2 при уборке. Соответствующие диаграммы показаны на фиг. 3a-3d. Они соответствуют описанному выше процессу, при этом данные потери могут происходить как непрерывно или квазинепрерывно, так и с интервалами. Кривая хода измеренных количеств 12 потерь зерна вдоль оси 13а времени показана в качестве примера на фиг. 3а. Поскольку в момент времени измерения количеств 12 потерь зерна зерно уже вышло из комбайна 2, это измерение, - числа или другого количества потерянных зерен, - может выполняться очень точно, если предусмотрено более длительное время измерения.
Кроме того, в предлагаемом способе измеряют величины 14 потерь зерна, воспринимаемые датчиком 1 потерь зерна в процессе уборки. Это измерение представляет собой измерение в процессе уборки, а также измерение непрерывно изменяющейся во времени величины. В качестве примера кривая хода воспринимаемой датчиком величины 14 потерь зерна вдоль оси 13b времени показана на фиг. 3b. Следует заметить, что согласно описанному функциональному действию датчик 1 потерь зерна не может незамедлительно и непосредственно воспринимать точное количество потерь зерна. Дело не только в том, что не все потерянные зерна попадают в зону чувствительности датчика 1 потерь зерна, но также и в том, что, - как уже было указано, - взаимосвязь между измеренными датчиком величинами 14 потерь зерна и действительным количеством потерянных зерен может быть очень различной. Поэтому следует указать, что под величинами измеренных датчиком величин 14 потерь зерна имеются в виду сигналы, генерируемые в качестве измеренных величин.
В контексте предлагаемого способа калибровочные данные служат для того, чтобы привести в соответствие эти измеренные датчиком величины 14 потерь зерна с действительными потерями. Именно в этом смысле следует понимать понятие «калибровка». Следует оговорить, что совсем не требуется непрерывного измерения количеств 12 потерь зерна или измеренных датчиком величин 14 потерь зерна, представленных непрерывными кривыми на диаграммах 3а и 3b. Отдельные или все измерения могут выполняться также в дискретные моменты времени.
Предлагаемый способ отличается тем, что измеренным количествам 12 потерь зерна и измеренным датчиком величинам 14 потерь зерна присваивают мерные отметки 15а, 15b, и на основе сопоставления измеренных количеств 12 потерь зерна с измеренными датчиком величинами 14 потерь зерна по мерными отметкам 15а, 15b определяют калибровочные данные для датчика 1 потерь зерна. В качестве примера на фиг. 3а, 3b показана только одна мерная отметка 15а, 15b в соответствии с отдельной измеренной величиной для количеств 12 потерь зерна, величина 12а потерь зерна, - и для измеренных датчиком величин 14 потерь зерна, - величина 14а измеренных датчиком потерь зерна. При этом присвоение мерных отметок 15а, 15b может относиться, как это показано здесь, к отдельной, то есть мгновенной измеренной величине количеств 12 потерь зерна, или к мгновенной измеренной датчиком величине 14 потерь зерна, или же, особенно в отношении измеренных датчиком величин 14 потерь зерна, также ко всему интервалу времени измеренных величин. Далее, и это особенно касается измеренных датчиком величин 14 потерь зерна, они могут подвергаться определенному усреднению или другой фильтрации и, соответственно, не обязательно должны быть «сырыми» или необработанными. Здесь и в дальнейшем понятие «мерная отметка» следует понимать в широком смысле. В частности, под ним следует понимать любую информацию, которая идентифицирует по меньшей мере один измерительный процесс с соответствующей измеренной величиной и тем самым допускает сравнение или сопоставление и прежде всего установление связи с другими измерительными процессами на основе их мерных отметок. Таким образом, различные измерительные процессы могут определяться как связанные друг с другом. Таким же образом в этом смысле могут определяться и различаться не связанные друг с другом измерительные процессы. Когда мерная отметка содержит информацию положения или времени, - как это будет более подробно описано дальше, - это присвоение отметок может опираться на близость по времени, или по пространству, или по идентичности.
Таким образом, в данном примере осуществления мерная отметка 15а соответствует количеству 12а потерь зерна, а мерная отметка 15b - измеренной датчиком величине 14а потерь зерна. Посредством сопоставления между соответствующими количествами 12 потерь зерна и измеренными датчиком величинами 14 потерь зерна посредством связанных друг с другом мерных отметок 15а, 15b могут определяться калибровочные данные, с помощью которых датчик 1 потерь зерна может быть калиброван или настроен таким образом, что далее измеренной датчиком величине 14 потерь зерна может быть придано количественное содержание действительной потери зерна, примерно соответствующее количеству 12 потерь зерна, однако теперь уже без требуемого действительного измерения количества потерь зерна. В частности, калибровочные данные могут служить для того, чтобы выбирать соответствующую характеристическую кривую для датчика 1 потерь зерна, например, из ряда предварительно определенных характеристических кривых и настраивать датчик на такую предварительно определенную характеристическую кривую и находить подходящую или, в частности, создавать новую характеристическую кривую.
При этом взаимосвязь между измеренными датчиком величинами 14 потерь зерна и количествами 12 потерь зерна может зависеть также от других переменных величин, например, от влажности массы или соломы, убираемой комбайном 2 с поля 11. Поэтому предпочтительно во время уборки датчиком 16 внешних условий, который здесь представлен на фиг. 1 датчиком 16а влажности, измеряются параметры 17 среды, в данном примере осуществления параметры влажности соломы принятой убранной массы, при этом параметрам 17 среды также присваивают мерные отметки 15с. Аналогично количествам 12 потерь зерна и измеренным датчиком величинам 14 потерь зерна на фиг. 3с показана кривая хода измеренных параметров 17 среды, - здесь величин влажности соломы, - вдоль оси 13 с времени с одной мерной отметкой 15с и соответствующим параметром 17а среды. В этом случае получают преимущество в том, что калибровочные данные определяют также на основе сопоставления измеренных параметров 17 среды по мерным отметкам 15а-15с вместе с количествами 12 потерь зерна и/или вместе с измеренными датчиком величинами 14 потерь зерна. Следует отметить, что оси 13a-13d времени могут быть заменены другими осями или могут иметь различные шкалы.
Как уже было указано выше, в экономическом отношении особое значение имеет величина доли потерь зерна в общем количестве собранного зерна. Поэтому предпочтительно калибровочные данные направлены на то, чтобы пересчитывать определяемые датчиком 1 величины 14 потерь зерна, в частности, в процентную долю потерь зерна от общего количества собранного зерна. Тогда можно непосредственно устанавливать, выдерживается ли в этом отношении заданная норма.
Согласно предпочтительному варианту это может достигаться путем того, что измеряют количества 18 зерна, собранные комбайном 2 при уборке. Количество 18 собранного зерна может измеряться непосредственно, например, с помощью камеры на транспортирующем устройстве 8, которое может быть выполнено в виде зернового элеватора, показанного на фиг. 1. В качестве примера на фиг. 3d показана кривая хода количеств 18 собранного зерна вдоль оси 13d времени. Под количествами 18 собранного зерна имеется в виду поступающая в зерновой бункер 9 зерновая масса, предпочтительно за вычетом не содержащих зерна фракций, если эти фракции определяются, например, с помощью соответствующего датчика. При измерении с помощью описанной выше камеры эти не содержащие зерна фракции могут быть также вычислены на основе обработки изображений. Далее, предпочтительно, измеренным количествам 18 собранного зерна присваивают мерные отметки 15d, так что пересчет в долю потерь зерна в собранном количестве основан на измеренных количествах 18 собранного зерна. В качестве примера на фиг. 3d показана одна мерная отметка 15d с соответствующим количеством 18а собранного зерна. Предпочтительно измеренные количества 18 собранного зерна по присвоенным им мерными отметкам 15d сопоставляют с другими упомянутыми измеренными величинами. Альтернативно или дополнительно этому соотношению с общим количеством собранного зерна измеренные датчиком количества 14 потерь зерна могут быть таким же образом отнесены к общему количеству собранного зерна и пересчитаны в соответствующую потерю зерна.
Как уже указывалось, в предлагаемом способе существенно то, что два отдельных измерения сопоставляют по их мерным отметкам 15a-15d и соотносят друг с другом, что позволяет выработать соответствующее соотношение этих двух величин для калибровки. Однако при измерении количеств 12 потерь зерна, с одной стороны, и измеренных датчиком величин 14 потерь зерна, с другой стороны, дело касается измерений при различных условиях. Предпочтительно датчик 1 потерь зерна определяет измеренные датчиком величины 14 потерь зерна посредством восприятия движущегося потока массы потерь зерна в комбайне 2. Таким образом, осуществляется восприятие мгновенной, относительно быстро изменяющейся величины, так что процесс измерения не может быть повторен или с целью уточнения растянут на более длительный промежуток времени. Это действительно также и в том случае, когда, как это было описано выше, измеренные датчиком величины 14 потерь зерна опираются на измерение в течение полного интервала времени, так как в этом интервале времени каждая отдельная величина является также мгновенной. В противоположность этому количества 12 потерь зерна предпочтительно измеряют как постоянную и, в частности, неподвижную величину. Поскольку к моменту измерения количества 12 потерь зерна они уже имеются в стабильном виде в качестве потерь, а следовательно, в статистическом виде, их измерение может выполняться со смещением по времени и более точно.
При этом вид информации, которая содержит мерные отметки 15a-15d для сопоставления, может быть различной. Согласно предпочтительному варианту осуществления мерные отметки 15a-15d содержат соответствующую информацию положения, указывающую положение зерноуборочного комбайна 2 при данном измерении. Эта информация положения может указывать, например, положение зерноуборочного комбайна 2 при соответствующем измерении или, - специально в отношении количеств 12 потерь зерна, - положение, в котором или на котором эти количества 12 потерь зерна были оставлены. Тогда сопоставление по мерным отметкам 15a-15d может означать подчинение измеренных величин в одинаковом положении.
С другой стороны, если известно, что между измерением датчиком величин 14 потерь зерна и оставлением количеств 12 потерь зерна из-за движения зерноуборочного комбайна 2 произошло смещение положения, которое здесь видно из расположения мерных отметок 15а, 15b на фиг. 2, сопоставление должно учитывать это смещение, зависящее от скорости. Кроме того, на фиг. 2 представлено соответствующее смещение положения измеренных при уборке количеств 18 собранного зерна в соответствии с мерной отметкой 15d и, при их наличии, измеренных параметров 17 среды в соответствии с мерной отметкой 15с. Соответственно, предпочтительно при сопоставлении должны учитываться все упомянутые выше виды смещений. Как следует из фиг. 2, в привязке к одному и тому же «месту» в потоке убранной массы регулярно по времени выполняют вначале измерение параметра 17 среды, предпочтительно уже в наклонном питателе, затем измерение датчиком величины 14 потерь зерна, затем количеств 12 оставленного зерна и только затем количеств 18 собранного зерна, поскольку продолжительность обработки до зернового бункера, как правило, дольше пути до оставления количеств потерь зерна. В данном примере осуществления измерение параметра 17 среды осуществляется по существу одновременно с измерением датчиком величин 14 потерь зерна. Однако в отдельных случаях смещение может означать другую последовательность ряда мерных отметок 15a-15d или смещение может отсутствовать. На фиг. 2 в качестве примера показаны другие группы 15е мерных отметок, которые соответствуют проведенным измерениям и мерные отметки которых имеют такое же смещение относительно друг друга.
Информация положения мерных отметок 15b, присвоенных измеренным датчиком величинам 14 потерь зерна, может создаваться во время работы на уборке с помощью электронной системы 19 определения положения, в частности с помощью GPS-модуля 19а (от англ. Global Positioning System - глобальная система навигации и определения положения) зерноуборочного комбайна 2. GPS-модуль 19а предназначен для приема сигналов от спутниковой системы 19b. При этом предпочтительно данные положения мерных отметок 15b соответствуют текущему положению зерноуборочного комбайна 2 при измерении датчиком величин 14 потерь зерна. В частности, информация положения может содержать данные глобальной системы координат, например географической системы координат, или соответствовать им. Эта информация глобальной системы координат может быть информацией о координатах от системы GPS.
Таким образом может производиться зависимая от места или положения калибровка датчика 1 потерь зерна, особенно когда она зависит от характеристик поля 11, которые не могут легко восприниматься датчиками на зерноуборочном комбайне 2. При этом предпочтительно калибровочные данные обеспечивают возможность зависимой от положения калибровки датчика 1 потерь зерна. В этом случае калибровочные данные для соответствующего положения могут быть определены из сопоставления измеренной датчиком величины 14 потерь зерна и количества 12 потерь зерна по мерным отметкам 15а, 15b в соответствии с текущим положением. Если не для каждого положения имеется такая измеренная величина, поскольку количества 12 потерь зерна могут быть измерены только в дискретных положениях, для других положений может быть предпринята интерполяция или другое приближение количеств 12 потерь зерна для определения калибровочных данных для зависимой от положения калибровки.
Альтернативно или дополнительно к такой информации положения мерных отметок 15a-15d мерные отметки 15a-15d могут учитывать также информацию времени. Поэтому предпочтительно мерные отметки 15a-15d содержат информацию времени момента измерения, - то есть того момента времени, в который осуществляют соответствующее измерение. Этой информацией времени может быть, в частности, штамп указания времени. Здесь также сопоставление количеств 12 потерь зерна с измеренными датчиком величинами 14 потерь зерна по мерным отметкам 15а, 15b может учитывать смещение процесса по времени между измерением величин 14 потерь зерна датчиком 1 потерь зерна и оставленными количествами 12 потерь зерна.
Для указанного сопоставления измеренные количества 12 потерь зерна могут быть записаны в различных блоках. Согласно предпочтительному варианту количества 12 потерь зерна предоставляются в виде числа зерен на площадь, в виде объема на площадь и/или в виде массы зерна на площадь.
С одной стороны, в принципе предлагаемый способ может осуществляться полностью в зерноуборочном комбайне 2. Так, количества 12 потерь зерна могут быть измерены также с помощью расположенной на зерноуборочном комбайне 2, но направленной на поле 11 и здесь не показанной полевой камеры. В тех случаях, когда оставленные зерноуборочным комбайном количества 12 потерь зерна измеряют с помощью отдельного устройства, согласно предпочтительному варианту количества 12 потерь зерна и присвоенные им мерные отметки 15а передаются беспроводным путем на зерноуборочный комбайн 2 или на контрольный блок 21. Согласно другому варианту предпочтительно существенные шаги предлагаемого способа осуществляют центрально, а следовательно, вне зерноуборочного комбайна 2. Так, предпочтительно, предусмотрено, что измеренные датчиком величины 14 потерь зерна и присвоенные им мерные отметки 15b в ходе уборки, - предпочтительно, уже при восприятии датчиком величин 14 потерь зерна, - передаются беспроводным путем на центральный процессор 20. Помимо измеренных датчиком величин 14 потерь зерна с присвоенными им мерными отметками 15b на центральный процессор 20 могут беспроводным путем передаваться количества 18 собранного зерна, также с присвоенными им мерными отметками 15d, и параметры 17 среды с присвоенными им мерными отметками 15с и при необходимости другие измеренные величины. Эти описанные выше отдельные измеренные величины с присвоенными им мерными отметками 15a-15d предпочтительно содержат информацию времени и/или информацию положения и могут быть собраны вместе по типу вектора, который здесь обозначен вектором сигнала.
Эта передача может выполняться от мобильного радиоаппарата 20 на зерноуборочном комбайне 2 и служить, в частности, для того, чтобы в центральном процессоре 20 производилось сопоставление количеств 12 потерь зерна и измеренных датчиком величин 14 потерь зерна по мерным отметкам 15а, 15b. Это предлагается, в частности, тогда, когда измерение количеств 12 потерь зерна осуществляют независимо от зерноуборочного комбайна 2, как это будет описано дальше. В центральном процессоре 20 могут также преимущественно определяться калибровочные данные для датчика 1 потерь зерна. Альтернативно определение калибровочных данных для датчика 1 потерь зерна может осуществляться также в зерноуборочном комбайне 2 или в контрольном блоке 21.
Относительно измерения количеств 12 потерь зерна первый вариант предусматривает, что это измерение запускается зерноуборочным комбайном 2 и зерноуборочный комбайн 2 присваивает измеренным количествам 12 потерь зерна соответствующую мерную отметку 15а. В частности, этот запуск и присвоение мерной отметки 15а производится контрольным блоком 21 зерноуборочного комбайна 2. Таким путем особенно просто может достигаться определенное смещение по времени или по положению относительно измерения датчиком величины 14 потерь зерна. При этом несмотря на запуск посредством зерноуборочного комбайна 2 или его контрольного блока 21 само измерение может производиться устройством, отдельным от зерноуборочного комбайна 2.
Второй вариант в этом отношении предусматривает, что измерение количеств 12 потерь зерна запускается не показанным здесь, отдельным от зерноуборочного комбайна 2 измерительным устройством, которое может представлять собой отдельное транспортное средство с соответствующим датчиком, при этом измерительное устройство присваивает измеренным количествам 12 потерь зерна соответствующую мерную отметку 15а. Это разделение позволяет выполнять измерение количеств 12 потерь зерна независимо по времени от процесса уборки зерноуборочного комбайна 2. Далее измеренные количества 12 потерь зерна вместе с их мерной отметкой 15а могут также беспроводным путем передаваться на центральный процессор 20 и для этого компоноваться в так называемый вектор данных. Альтернативно и, в частности, тогда, когда сопоставление имеет место в зерноуборочном комбайне 2, этот вектор данных или содержащиеся в нем данные могут также беспроводным путем передаваться на зерноуборочный комбайн 2.
В предпочтительном примере осуществления предусмотрено измерение количеств 12 потерь зерна с использованием контрольных емкостей 22. Такие в принципе известные и здесь подробно не описываемые контрольные емкости 22 служат для измерения действительных потерь зерна. Для этого они содержат, например, приемные коробки, которые постепенно заполняются потерянными зернами. Из степени заполнения этих коробок путем визуального контроля могут определяться количества 12 потерь зерна. Возможны также другие конструктивные варианты таких контрольных емкостей. Поэтому предпочтительно измерять количества 12 потерь зерна, принятые в контрольную емкость 22. Для приема потерянных зерен предусмотрено, что контрольная емкость 22 лежит на поле 11 под зерноуборочным комбайном 2 или за ним в области заднего конца сепарирующего устройства 6. Для такого расположения контрольной емкости 22 существуют различные возможности.
Для того чтобы обходиться без помощи дополнительного работника, который должен держаться рядом с зерноуборочным комбайном 2 и укладывать контрольную емкость 22, может быть предусмотрено, что контрольная емкость 22 до ее снятия, - или до ее сброса, - расположена на зерноуборочном комбайне 2, - здесь в области жатвенного аппарата 3, как это показано на фиг. 1, - а отделение контрольной емкости 22 инициируется зерноуборочным комбайном 2 или контрольным блоком 21 комбайна. При этом контрольная емкость 22 падает на поле 11. После этого в процессе уборки зерноуборочный комбайн 2 проходит над контрольной емкостью 22, так что та оказывается в упомянутой области заднего конца сепарирующего устройства 6.
Альтернативно расположению контрольной емкости 22 на зерноуборочном комбайне 2 для приема количеств 12 потерь зерна она может быть помещена независимо от зерноуборочного комбайна 2, в частности, вручную, то есть, например, работником, находящимся рядом с зерноуборочным комбайном 2.
Определенные в соответствии с предложенным способом калибровочные данные, с одной стороны, могут использоваться для калибровки или настройки того же датчика 1 потерь зерна, который определил величины 14 потерь зерна, лежащие в основе калибровочных данных. Однако предпочтительно калибровочные данные могут использоваться также для калибровки датчика потерь зерна на другом зерноуборочном комбайне 2а. В этом случае предпочтительно предусмотрено, что установленные калибровочные данные записывают, - в частности, предпочтительно в центральном процессоре 20, - и предоставляют другому зерноуборочному комбайну 2а, показанному в качестве примера на фиг. 2. Для этого может быть предусмотрено, что установленные калибровочные данные передают беспроводным путем от центрального процессора 20 на другой зерноуборочный комбайн 2а, например, через мобильный радиоаппарат 20b другого зерноуборочного комбайна 2а. Как это было описано выше, когда определение калибровочных данных для датчика 1 потерь зерна осуществляется в центральном процессоре 20, оно может базироваться также на сопоставлении измеренных количеств 12 потерь зерна с измеренными датчиком величинами 14 потерь зерна от нескольких комбайнов. При этом может достигаться расширение базы для определения калибровочных данных и, соответственно, еще более точная калибровка.
Перечень позиций
1 Датчик потерь зерна
2 Зерноуборочный комбайн
3 Жатвенный аппарат
4 Наклонный питатель
5 Молотильное устройство
6 Сепарирующее устройство
6а Клавиши соломотряса
7 Очистное устройство
8 Транспортирующее устройство
9 Зерновой бункер
10 Задняя часть
11 Поле
12, 12а Количества потерь зерна
13а-13d Ось времени
14, 14а Измеренные датчиком величины потерь зерна
15а-15е Мерные отметки
16, 16а Датчик параметров среды
17, 17а Параметры среды
18, 18а Количества собранного зерна
19 Электронная система определения положения
19а GPS-модуль
19b Спутниковая система
20 Центральный процессор
20а, 20b Мобильный радиоаппарат
21 Контрольный блок
22 Контрольная емкость
Реферат
Изобретение относится к сельскому хозяйству. Способ определения калибровочных данных для датчика потерь зерна на зерноуборочном комбайне включает измерение количества потерь зерна, которые были оставлены зерноуборочным комбайном при эксплуатации на уборке. Датчиком потерь зерна во время эксплуатации на уборке измеряют величины потерь зерна. Измеренным количествам потерь зерна и измеренным датчиком величинам потерь зерна присваивают мерные отметки. На основе сопоставления измеренных количеств потерь зерна и измеренных датчиком величин потерь зерна по мерным отметкам определяют калибровочные данные для датчика потерь зерна. Предложенный способ определения калибровочных данных для датчика потерь зерна обеспечивает определение улучшенных калибровочных данных для датчика потерь зерна на зерноуборочном комбайне. 14 з.п. ф-лы, 3 ил.
Формула
Документы, цитированные в отчёте о поиске
Самоходная уборочная сельхозмашина с устройством измерения потерь
Комментарии