Арматура и способ управления арматурой - RU2627755C1
Код документа: RU2627755C1
Чертежи
Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к арматуре, имеющей функцию балансировки, предназначенной для системы распределения текучей среды, и к арматурной системе, содержащей такую арматуру. Настоящее изобретение относится также к способу управления арматурой в системе распределения текучей среды.
Уровень техники
Системы распределения текучей среды, например, для теплоснабжения, холодоснабжения и водоснабжения, предназначены для подачи текучей среды от источника к пункту потребления. Каждый пункт потребления обычно имеет расчетный и конструктивно обоснованный требуемый расход или перепад давления. Однако, в зависимости от типа жидкостной системы, требуемый расход часто является изменяющимся во времени и может изменяться в зависимости от таких факторов, как сезонность (например, лето или зима), что приводит к изменению нагрузки со стороны пунктов потребления, изменениям температуры текучей среды системы, изменениям расхода текучей среды системы (например, питьевой воды).
В системах распределения текучей среды часто применяется регулирующая арматура, которая имеет изменяемую величину открытия для возможности регулирования расхода.
Балансировочная и регулирующая арматура обеспечивает дополнительную особенность/функцию. Для балансировки системы поворачивают маховик арматуры для предварительной установки максимального открытия арматуры, то есть максимального расхода через арматуру. Например, для арматуры, имеющей седло арматуры, с которым взаимодействует подвижная тарелка арматуры, механизм, соединенный с маховиком, будет ограничивать расстояние, на которое может удаляться от седла арматуры тарелка арматуры. Привод арматуры будет указывать, что арматура не может быть открыта более и, поэтому, можно откалибровать регулирующую часть для регулирования перемещения арматуры в заданных пределах.
Несмотря на то что функция предварительной настройки, обеспечиваемая существующей балансировочной регулирующей арматурой, является полезной для получения требуемых расходов, например, в разных частях здания, ее недостатком является то, что она является относительно сложной и дорогостоящей по сравнению с обычной арматурой без функции балансировки.
Сущность изобретения
Задачей настоящего изобретения является создание арматуры, имеющей функцию балансировки, которая лишена вышеупомянутых недостатков существующей арматуры. Эта и другие задачи, которые очевидны из приведенного ниже описания, решаются с помощью арматуры, арматурной системы и способа управления арматурой в соответствии с независимыми пунктами прилагаемой формулы изобретения.
Изобретательский замысел настоящего изобретения основывается на понимании того, что существующие маховики и сложные механизмы для предварительной установки максимального расхода через арматуру могут быть заменены на виртуальную предварительную установку.
Согласно первой особенности изобретательского замысла настоящего изобретения предлагается арматура, имеющая функцию балансировки, предназначенная для системы распределения текучей среды. Арматура содержит
впускное отверстие для текучей среды и выпускное отверстие для текучей среды,
запорный элемент арматуры, имеющий возможность перемещения между закрытым положением, в котором исключена возможность прохождения текучей среды от указанного впускного отверстия для текучей среды к указанному выпускному отверстию для текучей среды, и полностью открытым положением,
приводное устройство (такое как электронное, пневматическое, гидравлическое или механическое), предназначенное для изменения положения запорного элемента арматуры,
блок управления, содержащий электронную память, выполненную с возможностью приема и запоминания значения величины ограничения степени открытия арматуры, причем указанное значение величины ограничения степени открытия арматуры характеризует выбранное промежуточное положение между указанным закрытым положением и указанным полностью открытым положением запорного элемента арматуры,
причем блок управления управляет приводным устройством так, что ограничивает перемещение запорного элемента арматуры положениями от указанного закрытого положения до указанного промежуточного положения.
Таким образом, блок управления с своей электронной памятью выполняет функцию «виртуального маховика». Помимо функции балансировки арматура может иметь также функцию регулирования. Она может быть выполнена как балансировочная и регулирующая арматура. Один и тот же блок управления может применяться и для функции балансировки, и для функции регулирования. Например, если предположить, что полностью открытое положение запорного элемента арматуры находится на расстоянии 20 мм от его закрытого положения и установлено, что для подходящей балансировки максимальное открытие будет на расстоянии 15 мм от закрытого положения, то тогда в электронной памяти блока управления запоминается значение величины ограничения степени открытия арматуры, соответствующее месту, находящемуся на расстоянии 15 мм от закрытого положения. Блок управления, таким образом, будет перекалибровываться так, что выбранное промежуточное положение (например, 15 мм от закрытого положения) становится максимально допустимым открытием запорного элемента арматуры. Другими словами, функция регулирования блока управления будет обеспечивать только возможность перемещения запорного элемента арматуры между закрытым положением (0 мм от закрытого положения) и выбранным промежуточным положением (например, 15 мм от закрытого положения).
Перекалибровка может быть пояснена на примере следующим образом. Предположим, что функция управления арматурой блока управления основана на входном напряжении, которое может изменяться от 0 В до 10 В, причем 0 В будет приводить к тому, что блок управления будет управлять приводным устройством таким образом, что оно будет вызывать перемещение запорного элемента арматуры в свое закрытое положение, и 10 В будет приводить к тому, что блок управления будет управлять приводным устройством таким образом, что оно будет вызывать перемещение запорного элемента арматуры в максимально открытое положение, и напряжения между ними будут приводить к изменению степеней открытости. До того как выполнена балансировка/предварительная установка, максимально открытое положение является полностью открытым положением (20 мм в примере, приведенном выше). Однако после предварительной установки в промежуточное положение (15 мм в примере, приведенном выше) блок управления будет осуществлять перекалибровку так, что входное напряжение величиной 10 В будет приводить к осуществлению управления приводным устройством с помощью блока управления таким образом, что оно будет вызывать перемещение запорного элемента арматуры только до указанного промежуточного положения, а не за его пределы.
Из указанного выше следует понимать, что блок управления может действовать таким образом, что осуществляет балансировку системы распределения текучей среды путем предварительной установки рабочей области для последующего управления расходом через арматуру. Таким образом, указанное выбранное (необходимое) промежуточное положение может, таким образом, рассматриваться для регулирования расхода как предварительная установка значения величины Kv. Блок управления, таким образом, по меньшей мере, в некоторых иллюстративных вариантах осуществления, может рассматриваться как имеющий два рабочих режима: один для предварительной установки/балансировки и один для регулирования.
Блок управления может представлять собой коммерчески доступный блок управления, уже применяемый в областях применения арматуры. Примерами таких блоков управления являются блоки управления ТА-МС-55, TA-MC55Y и ТА-МС100, предоставляемые фирмой ТА Hydronics. Блок управления может быть модернизирован с помощью подходящей печатной платы и/или с помощью подходящего программного обеспечения, или существующее программное обеспечение может быть перепрограммировано для задействования электронной памяти. Затем значение величины ограничения степени открытия арматуры запоминается как программное значение вместо механического ограничения. Таким образом, в отличие от технических решений, известных из уровня техники, использование изобретательского замысла настоящего изобретения позволит выполнить балансировку/предварительную установку, то есть выбор необходимого промежуточного положения, представляющего собой максимально допустимое положение, без необходимости в повороте кем-либо маховика. Кроме того, уменьшается сложность конструкции арматуры (и соответственно расходы).
Запорный элемент арматуры может действовать таким образом, что обеспечивает регулирование физического свойства текучей среды. Физическим свойством могут быть, например, расход от впускного отверстия к выпускному отверстию, перепад давления от впускного отверстия к выпускному отверстию, значение величины Kv и температура.
Изобретательский замысел может быть применен для различных типов запорного элемента арматуры. Например, запорный элемент арматуры может совершать вращательное или поворотное движение, при этом выбранное промежуточное положение будет угловым положением между закрытым и полностью открытым положениями запорного элемента арматуры. Примерами такой поворотной арматуры являются шаровые клапаны и дроссельные клапаны. В других вариантах осуществления запорный элемент арматуры может совершать прямолинейное или поступательное движение. Например, запорный элемент арматуры может быть прикреплен к штоку арматуры или содержать шток арматуры, который может подниматься, соответствующим образом в аксиальном направлении, из закрытого положения запорного элемента арматуры в положения с различными степенями открытия. Таким образом, значение величины ограничения степени открытия арматуры, которое характеризует выбранное промежуточное положение, в этом случае может рассматриваться как значение величины ограничения степени подъема штока арматуры.
Согласно по меньшей мере одному иллюстративному варианту осуществления, с запорным элементом арматуры функционально связано средство для определения положения, предназначенное для определения его текущего положения и подающее сигнал о текущем положении на вход блока управления.
Согласно по меньшей мере одному иллюстративному варианту осуществления, указанное приводное устройство содержит двигатель, предназначенный для перемещения запорного элемента арматуры, и указанное средство для определения положения приспособлено для измерения действительного положения двигателя относительно исходного положения двигателя, причем соотношение между указанным действительным положением и указанным исходным положением преобразуется в текущее положение запорного элемента арматуры.
Согласно по меньшей мере одному иллюстративному варианту осуществления, указанное приводное устройство соединено с двигателем, предназначенным для перемещения запорного элемента арматуры, и указанное средство для определения положения приспособлено для измерения действительного положения компонента, соединенного с двигателем, относительно исходного положения указанного компонента, соединенного с двигателем, причем соотношение между указанным действительным положением и указанным исходным положением преобразуется в текущее положением запорного элемента арматуры.
Средство для определения положения может иметь один или несколько возможных вариантов исполнения. Например, средство для определения положения может представлять собой датчик положения, такой как магнитный, ультразвуковой или оптический датчик. Средство для определения положения может также определять положение запорного элемента арматуры непосредственно. Например, перемещение запорного элемента арматуры может вызываться другими устройствами для перемещения, движения которых могут преобразовываться в перемещение запорного элемента арматуры. Примером такого устройства является поршень, перемещающийся в цилиндре и соединенный при этом с запорным элементом арматуры с помощью подходящего соединительного звена. Положение поршня может использоваться для определения положения запорного элемента арматуры. Другой возможный вариант исполнения - это камера с переменным объемом, имеющая разделяющий элемент, такой как гибкая мембрана или подвижный поршень, причем объем и/или давление в камере могут использоваться для определения/вычисления положения запорного элемента арматуры. Следующая возможность заключается в выявлении угловой ориентации приводного вала двигателя, например выявлении положения одного или нескольких зубьев приводного вала. Еще одним возможным вариантом исполнения является применение шагового двигателя, функционально связанного с запорным элементом арматуры, причем количество совершаемых шагов, начиная от исходного положения, может преобразовываться в положение запорного элемента арматуры.
В отношении шагового двигателя следует отметить, что, согласно по меньшей мере одному иллюстративному варианту осуществления, указанное приводное устройство содержит шаговый двигатель или соединено с шаговым двигателем, предназначенным для перемещения запорного элемента арматуры, и указанное средство для определения положения приспособлено для подсчета количества шагов, совершаемых шаговым двигателем относительно начального или исходного положения шагового двигателя, причем количество совершаемых шагов преобразуется в текущее положение запорного элемента арматуры. Это преобразование может быть соответствующим образом выполнено с помощью блока управления, однако преобразование может быть выполнено и с помощью удаленного вычислительного устройства, например системы управления или компьютера системы диспетчеризации инженерного оборудования здания (BMS). BMS может посылать на вход блока управления сигнал, который может заключать в себе количество совершаемых шагов, под действием которого блок управления посылает соответствующий сигнал управления в шаговый двигатель. В соответствии с другим вариантом, входной сигнал содержит информацию об изменении положения запорного элемента арматуры, и блок управления может вычислять, сколько шагов шагового двигателя соответствует этому изменению.
Согласно по меньшей мере одному иллюстративному варианту осуществления арматура содержит зубчатую передачу и преобразователь движения, причем шаговый двигатель функционально связан с входной частью зубчатой передачи и преобразователь движения функционально связан с выходной частью зубчатой передачи, при этом преобразователь движения функционально связан с запорным элементом арматуры для обеспечения преобразования движений зубчатой передачи в перемещение запорного элемента арматуры. Входная часть может, соответствующим образом, представлять собой часть с низким крутящим моментом, которая соединена повышающей передачей с выходной частью/частью с высоким крутящим моментом. Преобразователь движения, таким образом, может преобразовывать движение поворота зубчатой передачи в прямолинейное движение. Например, преобразователь движения может содержать шпиндель, который содержит две находящиеся в зацеплении друг с другом резьбовые части шпинделя. В других вариантах осуществления преобразователь движения может содержать зубчатое колесо, находящееся в зацеплении с реечной передачей.
Согласно по меньшей мере одному иллюстративному варианту осуществления блок управления приспособлен для приема сигнала балансировки, такого как электронный сигнал балансировки, характеризующего указанное значение величины ограничения степени открытия арматуры и/или указанное выбранное промежуточное положение. Электронный сигнал балансировки может поступать от любого из нескольких возможных источников. Например, сигнал балансировки может поступать от прибора для измерения расхода, функционально связанного с блоком управления. Такой прибор для измерения расхода может быть, например, соединен с напорными каналами арматуры. После осуществления регулировки расхода до момента выявления прибором для измерения расхода необходимого максимального расхода для целей балансировки, прибор для измерения расхода может послать сигнал балансировки в блок управления. Это может быть выполнено проводным или беспроводным способом, например при посредстве коммуникационного протокола Bluetooth. Прибор для измерения расхода может иметь интерфейс пользователя, при помощи которого пользователь активирует передачу электронного сигнала балансировки. Другие возможные технические решения будут предусматривать предварительное программирование прибора для измерения расхода, чтобы выявить конкретный расход, и сразу после его выявления оно будет посылать сигнал балансировки в блок управления. В качестве альтернативы или дополнения к прибору для измерения расхода для посылки сигнала балансировки, сама арматура может быть снабжена интерфейсом пользователя, таким как панель управления или нажимная кнопка для посылки сигнала балансировки и, в результате этого, обеспечения запоминания значения величины ограничения степени открытия арматуры. В других вариантах осуществления интерфейс пользователя может быть расположен в удаленном месте, как например в устройстве управления BMS, в специальной панели управления или выполнен в виде устройства беспроводной связи, такого как мобильный телефон, компьютер или устройство дистанционного управления.
Сразу после того как выполнена балансировка и осуществлена перекалибровка блока управления, если только он уже не откалиброван правильно в результате предыдущей предварительной установки, с помощью блока управления может быть осуществлена регулировка положения арматуры для введения коррекции на флуктуации или искажения в системе распределения текучей среды или изменения других условий окружающей среды. Например, если в комнате необходимо установить определенную температуру и открыто окно, впускающее холодный воздух, блок управления будет управлять приводным устройством, вызывая перемещение запорного элемента арматуры в положение с большей степенью открытия, в результате которого увеличивается расход (нагревательной) воды и, тем самым, излучение тепла, например, радиатором, связанным с арматурой. Это отражено по меньшей мере в одном иллюстративном варианте осуществления, в котором блок управления приспособлен для приема сигнала управления, вводящего коррекцию на разность между измеренным значением и требуемым значением физического свойства, такого как температура, давление и расход. Указанные измеренные значения могут быть собраны с помощью, соответственно, датчика температуры или давления или расходомера. Сигнал управления может представлять собой электронный сигнал, сигнал давления или другой подходящий сигнал.
Согласно по меньшей мере одному иллюстративному варианту осуществления, средство для определения положения и/или блок управления приспособлен для подачи выходного сигнала в цепь обратной связи, причем выходной сигнал характеризует текущее положение запорного элемента арматуры, то есть сигнал содержит информацию о текущем положении запорного элемента арматуры, при этом блок управления приспособлен для приема входного сигнала, поступающего от цепи обратной связи, вызывающего корректировочное перемещение запорного элемента арматуры, если текущее положение запорного элемента арматуры отклоняется от требуемого положения запорного элемента арматуры. Таким образом, входной сигнал может представлять собой, например, сигнал управления, предназначенный для введения коррекции на отклонения между требуемым и измеренным значениями физического параметра, как указано выше. Контур обратной связи может быть включен в состав системы диспетчеризации инженерного оборудования здания, которая обменивается информацией с рядом арматуры в здании или в других сооружениях.
Следует понимать, что арматура может иметь больше, чем одно впускное отверстие и одно выпускное отверстие. Например, она может иметь два впускных отверстия и одно выпускное отверстие или одно впускное отверстие и два выпускных отверстия или два впускных отверстия и два выпускных отверстия. Возможно также, чтобы она имела более чем два впускных отверстия и/или выпускных отверстия.
Следует также понимать, что текучая среда, проходящая через арматуру, может представлять собой газ или жидкость, например воду для теплоснабжения/холодоснабжения или питьевую воду. Таким образом, в соответствии по меньшей мере с одним иллюстративным вариантом осуществления, арматура предназначена для распределительной системы теплоснабжения/холодоснабжения, такой как централизованная система теплоснабжения/холодоснабжения, или для распределительной системы водоснабжения питьевой водой.
Согласно второй особенности изобретательского замысла предлагается арматурная система. Арматурная система содержит
арматуру согласно первой особенности изобретательского замысла и
измерительный прибор, который функционально связан с арматурой, предназначенный для измерения физического свойства текучей среды, проходящей через арматуру, причем измерительный прибор содержит средства связи, функционально связанные с блоком управления арматурой, предназначенные для передачи по меньшей мере одного из следующих элементов информации блоку управления:
- указанного значения величины ограничения степени открытия арматуры,
- указанного выбранного промежуточного положения,
- информации о том, что в арматуре имеет место требуемое максимальное открытие, причем положение запорного элемента арматуры, когда имеет место указанное требуемое максимальное открытие арматуры, становится указанным выбранным промежуточным положением.
Арматура может содержать напорные каналы, к которым может быть подсоединен измерительный прибор для определения расхода.
Измерительный прибор может представлять собой, например, прибор для измерения расхода, предназначенный для измерения расхода через арматуру, и указанное требуемое максимальное открытие арматуры может представлять собой требуемый максимальный расход. Измерительный прибор может также, или в соответствии с другим вариантом, измерять давление или температуру текучей среды, в зависимости от того, какое физическое свойство должно регулироваться.
Согласно третьей особенности изобретательского замысла, предлагается способ управления арматурой в системе распределения текучей среды. Способ включает
определение требуемого максимального открытия арматуры,
установку запорного элемента арматуры, который имеет возможность перемещения между закрытым положением и полностью открытым положением, в промежуточное положение, в котором получают указанное требуемое максимальное открытие арматуры,
запоминание в блоке управления данных, характеризующих указанное промежуточное положение,
задание указанного промежуточного положения как представляющего собой максимально допустимое открытое положение запорного элемента арматуры.
Максимальное открытие арматуры может основываться на максимальном требуемом расходе, однако, как указано выше, оно может основываться на других параметрах, в зависимости от которых имеется в распоряжении физическое свойство, которое подлежит регулированию. Такими физическими свойствами могут быть, например, давление, перепад давления, расход и/или значение величины Kv.
Балансировка или предварительная установка арматуры могут быть выполнены с применением прибора для измерения расхода и/или давления, описанного выше применительно к первой и второй особенностям. В случае прибора для измерения расхода, когда он показывает или установлено, что расход текучей среды через арматуру в настоящий момент находится на уровне предварительно выбранного или вычисленного требуемого максимального расхода, тогда промежуточное положение запорного элемента арматуры в настоящий момент запоминается в блоке управления как данные/программное значение. После этого блок управления может действовать таким образом, что осуществляет регулировку и вводит коррекцию на флуктуации или искажения в системе распределения текучей среды. С помощью запомненного значения исключается возможность перемещения запорного элемента арматуры за пределы указанного промежуточного положения. Однако запорный элемент арматуры еще имеет возможность перемещения между закрытым положением и указанным промежуточным положением. Это отражено в описанном ниже иллюстративном варианте осуществления.
Согласно по меньшей мере одному иллюстративному варианту осуществления, способ дополнительно включает подачу в указанный блок управления входного сигнала, который характеризует требуемое положение, находящееся между указанным закрытым положением и указанным промежуточным положением, и перемещение запорного элемента арматуры в указанное требуемое положение.
Согласно по меньшей мере одному иллюстративному варианту осуществления, указанный входной сигнал представляет собой цифровой и/или аналоговый электрический входной сигнал. В случае цифрового сигнала он может представлять собой сигнал данных. Такой сигнал данных может быть передан с помощью беспроводных средств или с помощью проводных средств. Аналоговый электрический входной сигнал может представлять собой входной ток и/или входное напряжение.
Согласно по меньшей мере одному иллюстративному варианту осуществления, указанный входной сигнал содержит напряжение на входе указанного блока управления, причем указанное входное напряжение является изменяемым между предварительно заданным первым напряжением и предварительно заданным вторым напряжением, при этом степень открытия запорного элемента арматуры зависит от величины указанного напряжения, и при этом, если на вход блока управления поступило указанное первое напряжение, то блок управления устанавливает запорный элемент арматуры в его закрытое положение, и если на вход блока управления поступает указанное второе напряжение, то блок управления устанавливает запорный элемент арматуры в указанное промежуточное положение. Первое напряжение может быть равно, например, 0 В. Однако первое напряжение может иметь и другую величину. Является подходящим второе напряжение, составляющее 100% максимального напряжения сигнала для указанного входного сигнала. Однако возможны также другие возможные альтернативные решения. Например, второе напряжение составляет менее 100% максимального напряжения, причем сигнал более высокого напряжения может быть применен для передачи иной информации, чем информация, относящаяся к позиционированию запорного элемента арматуры.
Входной сигнал не обязательно передается в виде напряжения. Он может представлять собой входной сигнал, передаваемый беспроводным путем. Входной сигнал, вместо того, чтобы изменяться между двумя значениями, такими как первое напряжение и второе напряжение, может иметь ограниченное число дискретных значений. Например, входной сигнал может иметь первое значение для открытия и второе значение для закрытия. В таком случае, пока входной сигнал поступает на вход блока управления, запорный элемент арматуры может перемещаться соответственно в направлении открытия и закрытия. Когда действие входного сигнала прекращается, прекращается также перемещение запорного элемента арматуры.
Согласно по меньшей мере одному иллюстративному варианту осуществления, способ дополнительно включает определение текущего положения запорного элемента арматуры, сравнение указанного текущего положения с требуемым положением запорного элемента арматуры, выполнение корректировочного позиционирования запорного элемента арматуры для введения коррекции на отклонения между указанным текущим положением и указанным требуемым положением запорного элемента арматуры.
Согласно по меньшей мере одному иллюстративному варианту осуществления, перемещение запорного элемента арматуры вызывается двигателем, причем перемещение запорного элемента арматуры к измененному положению включает определение смещения, которое должен совершать двигатель (или компонент, соединенный с двигателем) для перемещения запорного элемента арматуры в указанное измененное положение, и подачу сигнала позиционирования из блока управления в двигатель для осуществления указанного смещения.
Согласно по меньшей мере одному иллюстративному варианту осуществления, перемещение запорного элемента арматуры вызывается шаговым двигателем, причем перемещение запорного элемента арматуры в измененное положение включает определение числа шагов, совершаемых шаговым двигателем для перемещения запорного элемента арматуры в указанное измененное положение, и выдачу из блока управления сигнала позиционирования в шаговый двигатель для совершения им указанного числа шагов.
Хотя операция установки запорного элемента арматуры может быть выполнена путем перемещения запорного элемента арматуры в окрестности того, что, как предполагается, станет промежуточным положением, то есть положением, в котором обеспечивается требуемый максимальный расход, в других вариантах осуществления, для начальной калибровки, запорный элемент арматуры перемещается на всем отрезке пути от закрытого положения до полностью открытого положения и/или наоборот при измерении степени открытия.
Согласно по меньшей мере одному иллюстративному варианту осуществления, указанная операция установки запорного элемента арматуры в промежуточное положение включает измерение физического свойства (такого как расход, значение величины Kv, давление, перепад давления, температура и/или разность температур) текучей среды в арматуре и перемещение запорного элемента арматуры между указанным закрытым положением и указанным полностью открытым положением, причем указанной операции запоминания в блоке управления данных, характеризующих указанное промежуточное положение, предшествует операция подачи в блок управления сигнала предварительной установки, когда достигнуто указанное максимальное требуемое открытие арматуры.
В некоторых случаях может требоваться изменение предварительной установки, то есть выбор нового промежуточного положения, и, таким образом, повторная балансировка системы распределения текучей среды. Например, в зимнее время выбранное промежуточное положение может находиться ближе к полностью открытому положению, чем в летнее время. Это отражено по меньшей мере в одном иллюстративном варианте осуществления.
Таким образом, согласно по меньшей мере одному иллюстративному варианту осуществления, способ включает по меньшей мере два режима предварительной установки, такие как зимний режим и летний режим, причем
в первом режиме предварительной установки указанное промежуточное положение представляет собой первое промежуточное положение между указанным закрытым положением и указанным полностью открытым положением,
во втором режиме предварительной установки указанное промежуточное положение представляет собой второе промежуточное положение между указанным закрытым положением и указанным полностью открытым положением,
причем указанное первое промежуточное положение отличается от указанного второго промежуточного положения.
В дополнение к указанному выше следует отметить, что способ согласно третьей особенности может включать любые из вариантов осуществления и признаков, описанных в связи с первой и второй особенностями.
Краткое описание графических материалов
На фиг. 1 и 2 изображена арматура согласно известному из уровня техники техническому решению.
На фиг. 3 схематически представлен по меньшей мере один иллюстративный вариант осуществления изобретательского замысла настоящего изобретения.
На фиг. 4a-4d представлен детальный вид разных положений запорного элемента арматуры по фиг. 3.
На фиг. 5 изображена арматура, частично в разрезе, согласно по меньшей мере одному иллюстративному варианту осуществления изобретательского замысла настоящего изобретения.
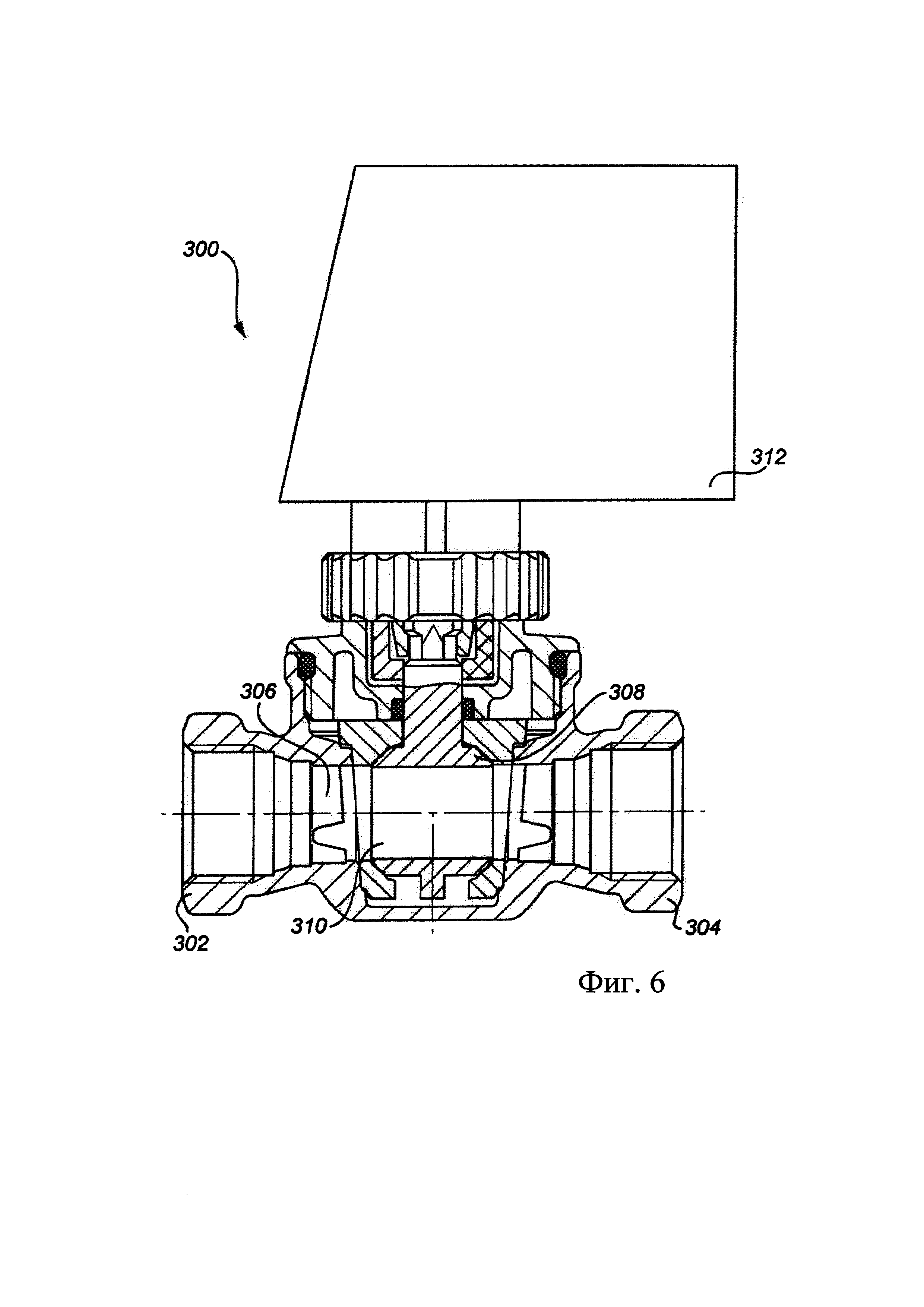
На фиг. 6 изображена арматура, частично в разрезе, согласно по меньшей мере еще одному иллюстративному варианту осуществления изобретательского замысла настоящего изобретения.
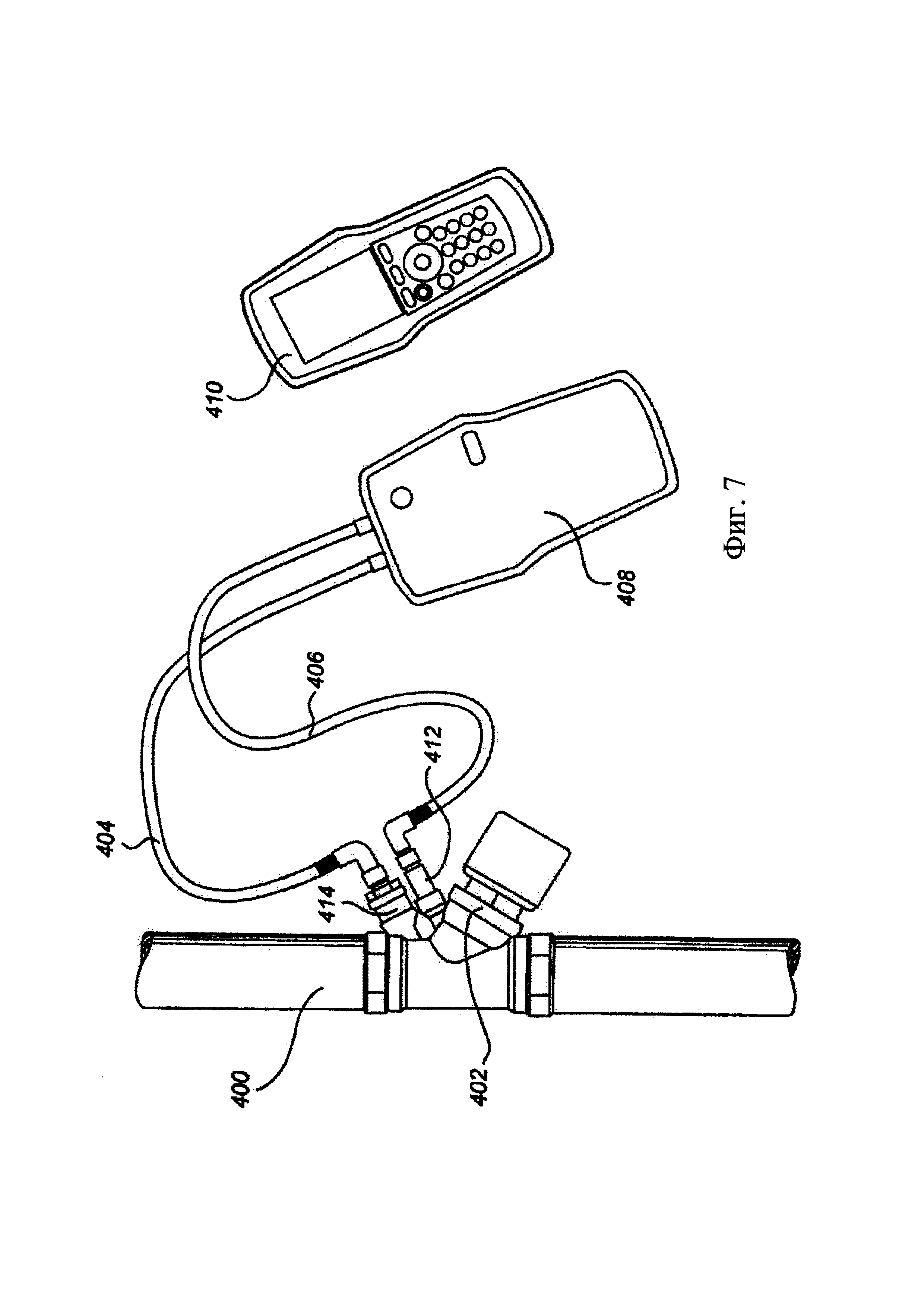
На фиг. 7 изображен измерительный прибор, который функционально связан с арматурой согласно по меньшей мере одному иллюстративному варианту осуществления изобретательского замысла настоящего изобретения.
Подробное описание графических материалов
На фиг. 1 и 2 изображена арматура согласно известному из уровня техники техническому решению.
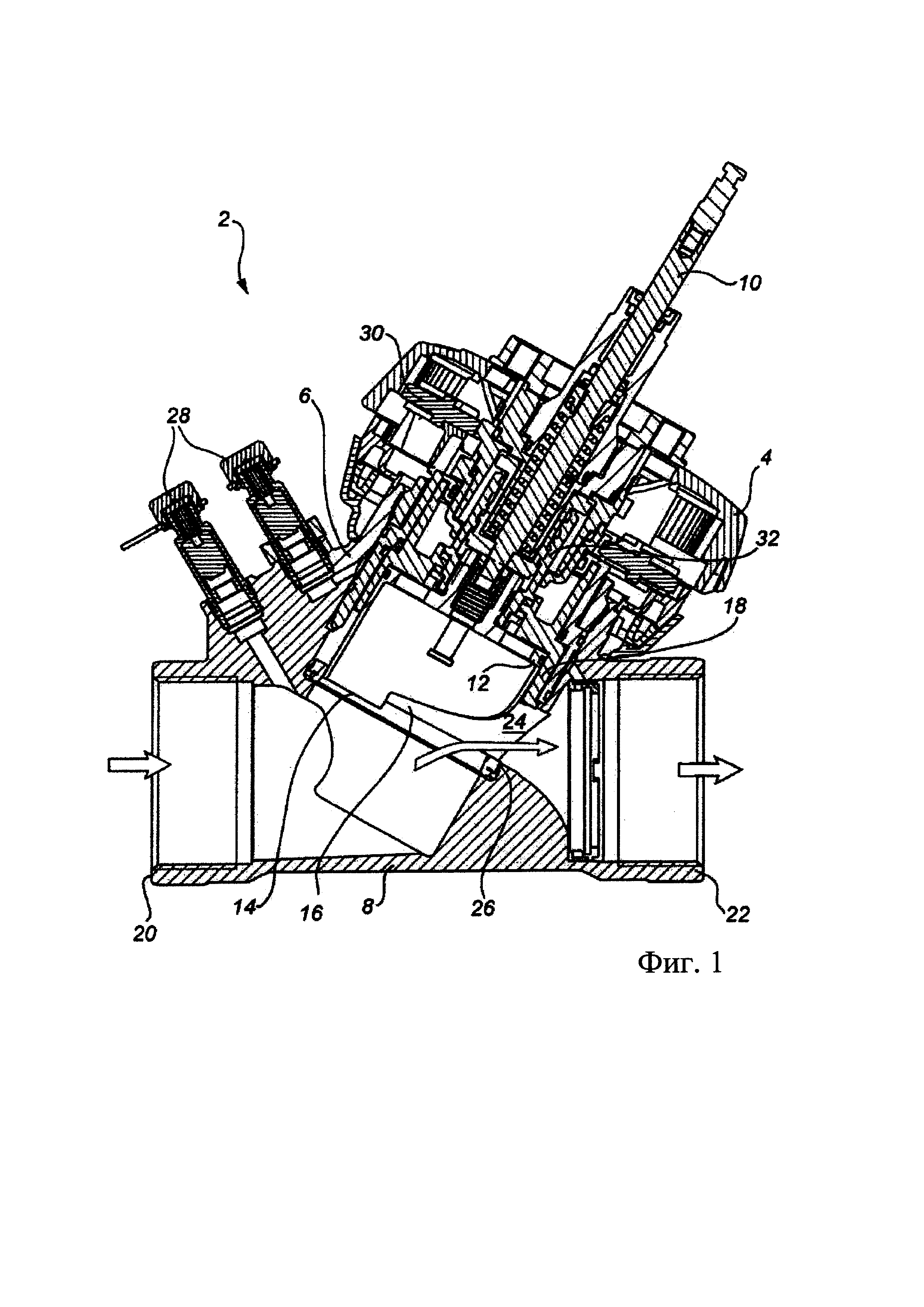
На фиг. 1 изображена регулирующая арматура 2, содержащая маховик 4. Привод установлен в горловине 6 арматуры, которая соединена с корпусом 8 регулирующей арматуры 2. В горловине 6 арматуры по центру установлен шток 10 арматуры. Горловина 6 арматуры содержит цилиндрическую внутреннюю пробку 12 в форме гильзы, предназначенную для регулирования и предварительной установки требуемого максимального открытия арматуры, в данном случае факультативного значения Kvs арматуры 2. Внутренняя пробка 12 является неподвижной относительно штока 10 арматуры, и внутренняя пробка 12 имеет открытое дно 14 для впуска текучей среды и отверстие 16 на ее боковой стороне для выпуска текучей среды.
Горловина 6 арматуры, кроме того, содержит цилиндрическую наружную пробку 18 в форме гильзы, которая частично окружает верхнюю часть внутренней пробки 12. Наружная пробка 18 предусмотрена, помимо прочего, для перекрытия отверстия 16 внутренней пробки 12 до требуемого проходного сечения. Наружная пробка 18 установлена с возможностью смещения в горловине 6 арматуры и, кроме того, для осуществления балансировки, внутренняя пробка 12 и наружная пробка 18 могут смещаться относительно друг друга.
Арматура 2 содержит также входной патрубок 20 и выходной патрубок 22. Между нижней частью горловины 6 арматуры и седлом 26 арматуры имеется проточный канал 24. Арматура 2 может также содержать два патрубка 28 для измерительных ниппелей.
Текучая среда может проходить через арматуру 2 от входного патрубка 20 через внутреннюю пробку 12 в направлении внутрь через ее дно 14 и наружу через ее отверстие 16 на боковой стороне, после этого далее через проточный канал 24 и затем к выходному патрубку 22.
Маховик 4 находится в зацеплении с промежуточной шестерней 30, снабженной зубьями, которая, в свою очередь, находится в зацеплении с винтом 32 предварительной установки. При предварительной установке выходная пробка 18 находится в своем верхнем, по отношению к седлу 26 арматуры, крайнем положении. Предварительная установка подразумевает, что устанавливается положение/расстояние отверстия 16 внутренней пробки 12 относительно седла 26 арматуры. К винту 32 предварительной установки через промежуточную шестерню 30 передается вращательное движение маховика 4. Нижняя часть винта 32 предварительной установки снабжена внутренней резьбой, которая взаимодействует с наружной резьбой, имеющейся на верхней части внутренней пробки 12. Вращение винта 32 предварительной установки преобразуется в аксиальное движение внутренней пробки 12. Таким образом, внутренняя пробка 12 перемешается в аксиальном направлении в сторону приближения к седлу 26 арматуры или в сторону удаления от него. Следует отметить, что наружная пробка 18 во время процедуры предварительной установки не перемещается, а остается в верхнем положении. Когда предварительная установка выполнена и арматура 2 в таком случае готова к выполнению регулирования, относительное положение внутренней пробки 12 и наружной пробки 18, заданное путем предварительной установки, будет оставаться неизменным. Во время управления арматурой 2, в то время как внутренняя и наружная пробки 12, 18 перемещаются вверх и вниз, отверстие 16 на боковой стороне внутренней пробки 12 будет оставаться заслоненным в большей или меньшей степени седлом 26 арматуры. При управлении арматурой 2 предусмотрено применение привода (не показан), толкающего верхний конец штока 10 арматуры так, чтобы вызывать его перемещение вниз и, таким образом, вызывать перемещение внутренней и наружной пробок 12, 18 в направлении вниз против действия силы упругости пружины.
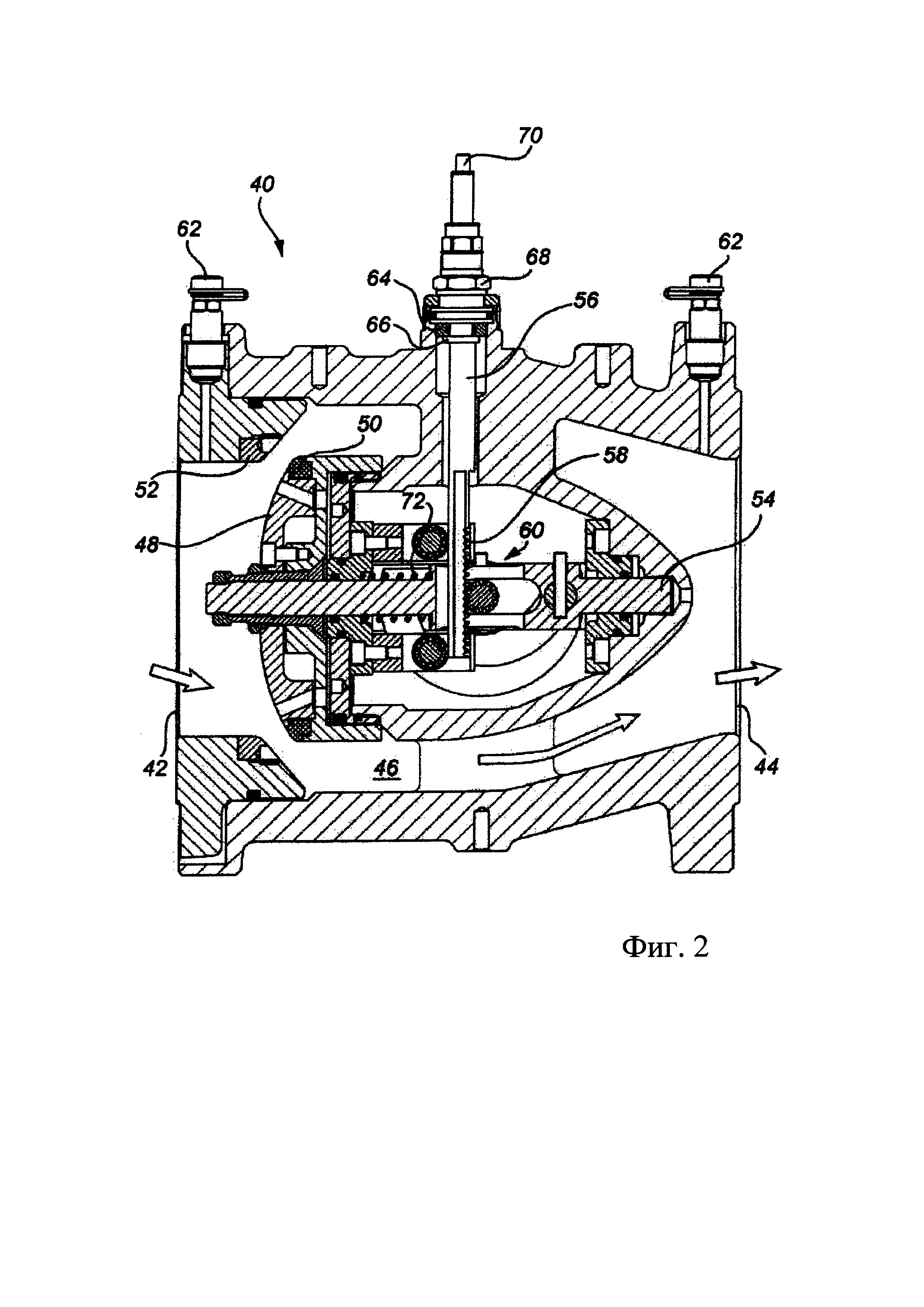
На фиг. 2 изображена другая известная арматура 40. Арматура 40 имеет впускное отверстие 42 и выпускное отверстие 44, а также проходящий между ними проточный канал 46 для текучей среды. Проточный канал 46 для текучей среды может быть закупорен посредством пробки 48, снабженной резиновым элементом 50, когда она прижата к седлу 52 арматуры. Пробка 48 установлена на валу 54, ось которого проходит через центр пробки 48.
Шток 56 проходит в направлении, перпендикулярном движению пробки 48 и параллельном поверхности пробки в форме зубчатого участка 58. Зубчатый участок 58 функционально связан с валом 54 посредством зубчато-кулачкового механизма 60. Аксиальное перемещение штока 56 преобразуется в аксиальное перемещение вала 54 (которое является перпендикулярным перемещению штока 56). Пробка 48, установленная на валу 54, тем самым тоже перемещается в аксиальном направлении, регулируя расстояние между пробкой 48 и седлом 52. С помощью каналов 62, находящихся по ту и другую сторону от пробки 48, осуществляется текущий контроль перепада давления на арматуре 40.
Аналогично известной арматуре 2 по фиг. 1, может также осуществляться предварительная установка максимально допустимого открытия арматуры 40 по фиг. 2. Имеется механический упор 64 для ограничения перемещения штока 56. Более конкретно, когда кольцевой фланец 66 штока 56 входит в соприкосновение с механическим упором 64, шток 56 не может перемещаться далее (в направлении вверх на фиг. 2). На фиг. 2 показано полностью открытое положение арматуры 40. Для осуществления предварительной установки арматуры 40 отпускают гайку 68 и перемещают механический упор 64 и шток 56 в направлении вниз до тех пор, пока пробка 48 не займет требуемое положение, то есть задается максимально допустимое открытие арматуры 40. Затем затягивают гайку 68, лишая подвижности механический упор 64, и на этом предварительная установка заканчивается. При последующем управлении арматурой 40 применяется привод (не показан), толкающий верхний конец 70 штока 56, вызывая его перемещение в направлении вниз, и, таким образом, перемещение пробки 48 по направлению к седлу 52 арматуры против действия силы упругости пружины 72. Если к штоку 56 не приложена сила в направлении вниз, то пружина 72, поджатая в направлении открытия арматуры, будет вызывать ход штока 56 вверх, однако перемещение штока ограничено механическим упором 64.
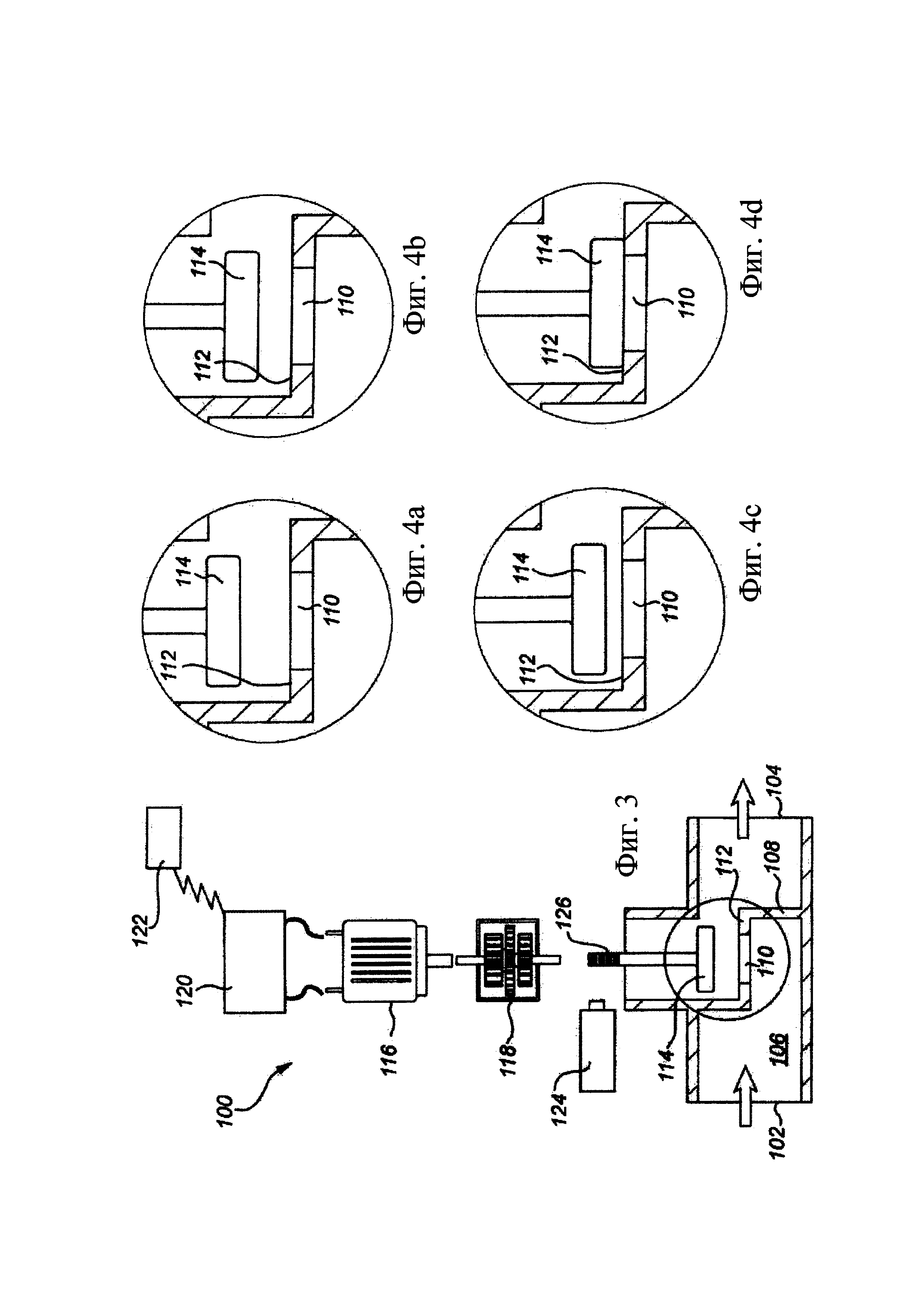
На фиг. 3 схематически представлен по меньшей мере один иллюстративный вариант осуществления изобретательского замысла настоящего изобретения. Следует отметить, что на фиг. 3 представлено схематическое изображение в общем виде арматуры 100, имеющей функцию балансировки, предназначенное исключительно для пояснения принципа, лежащего в основе изобретательского замысла. Однако этот принцип может быть применен для разных типов арматуры, такой как арматура, аналогичная изображенной на фиг. 1 и 2.
Арматура 100 имеет впускное отверстие 102 для текучей среды и выпускное отверстие 104 для текучей среды, а также проточный канал 106, находящийся между впускным отверстием 102 и выпускным отверстием 104. В этом варианте осуществления арматура 100 изображена как имеющая корпус арматуры с перегородкой 108, выполненной со сквозным отверстием 110. Область вокруг сквозного отверстия 110 образует седло 112 арматуры. Запорный элемент 114 арматуры, в данном варианте осуществления изображенный в виде тарелки, установленной на штоке арматуры, является регулируемым относительно седла 112 арматуры. Тарелка арматуры функционально связана с приводным устройством 116, предназначенным для изменения положения запорного элемента 114 арматуры. Приводное устройство 116 здесь показано в виде двигателя. Зубчатая передача 118 преобразует вращательное движение двигателя 116 в прямолинейное движение запорного элемента 114 арматуры. Блок 120 управления содержит электронную память, которая выполнена с возможностью приема и запоминания значения величины ограничения степени открытия арматуры, что более подробно описано непосредственно ниже со ссылкой на фиг. 4a-4d.
На фиг. 4a-4d представлены детальные виды, показывающие разные положения запорного элемента 114 арматуры по фиг. 3.
На фиг. 4а показано полностью открытое положение запорного элемента 114 арматуры, то есть требуемое максимальное расстояние, отделяющее от седла 112 арматуры. На фиг. 4d показано закрытое положение запорного элемента 114 арматуры, в котором запорный элемент 114 арматуры прилегает к седлу 112 арматуры, закупоривая сквозное отверстие 110.
Для осуществления балансировки арматуры определяют максимальное требуемое открытие арматуры; такое максимальное требуемое открытие соответствует промежуточному положению запорного элемента 114 арматуры, то есть между полностью открытым положением, показанным на фиг. 4а, и закрытым положением, показанным на фиг. 4d. Такое промежуточное положение показано, например, на фиг. 4b. Выбранное промежуточное положение может быть представлено в виде значения величины ограничения степени открытия арматуры, которое запоминается в электронной памяти блока 120 управления (фиг. 3). Блок 120 управления будет затем управлять приводным устройством 116, ограничивая перемещение запорного элемента 114 арматуры так, что он не может отстоять от седла 112 арматуры за пределами указанного промежуточного положения.
Выбор промежуточного положения, то есть предварительная установка арматуры 100, может зависеть от различных параметров и/или рабочих условий. Например, в разные времена года потребность в теплоснабжении в здании может изменяться. Если в качестве примера и для простоты предположить, что в системе присутствует определенная текучая среда для теплоснабжения, имеющая одну и ту же температуру текучей среды на протяжении года, то тогда фиг. 4b может отображать указанное выбранное промежуточное положение в зимних условиях, когда требуется больше текучей среды для теплоснабжения, тогда как фиг. 4с, на которой запорный арматурный элемент 114 арматуры показан расположенным ближе к седлу 112 арматуры, может отображать указанное выбранное промежуточное положение в летнее время. Однако на практике рабочие условия могут изменяться на протяжении года и по разным причинам. Температура текучей среды может быть, например, разной в разные периоды времени. На практике максимально допустимое открытие арматуры часто может требоваться для целей холодоснабжения, а не для целей теплоснабжения. Таким образом, схематические примеры, представленные на фиг. 4b и 4с, могут быть представлены в обратном порядке, то есть фиг. 4b может отображать промежуточное положение, когда требуется холодоснабжение, тогда как фиг. 4с может отображать промежуточное положение, когда требуется теплоснабжение или холодоснабжение в меньшей мере.
Другими словами, блок 120 управления может быть выполнен с возможностью изменения запомненного значения величины ограничения величины степени открытия арматуры, когда в него поступает новое значение величины ограничения степени открытия арматуры. В других вариантах осуществления блок 120 управления может быть выполнен имеющим несколько одновременно хранимых значений величины ограничения степени открытия арматуры, причем, когда пользователь выбирает определенный режим (например зимний или летний режим), блок 110 управления будет использовать соответствующее значение величины ограничения степени открытия арматуры для управления приводным устройством 116 так, что исключается возможность перемещения запорного элемента 114 арматуры за пределы (открытия больше, чем) промежуточного положения, связанного с указанным значением величины ограничения степени открытия арматуры.
Балансировка или предварительная установка арматуры 100 может быть выполнена различными способами, как описано в другом месте в данной заявке. На фиг. 3 система 122 диспетчеризации инженерного оборудования здания (BMS) схематически изображена как поддерживающая при работе связь с блоком 120 управления. BMS 122 может посылать электронный сигнал балансировки, характеризующий значение величины ограничения степени открытия арматуры и/или выбранное промежуточное положение (которое будет преобразовано блоком управления в значение величины ограничения степени открытия арматуры, запоминаемое в электронной памяти).
На фиг. 3, кроме того, показано средство 124 для определения положения, здесь показанное в виде оптического или ультразвукового датчика, который определяет текущее положение запорного элемента 114 арматуры, и приспособленное для подачи сигнала обратной связи о текущем положении в блок 120 управления. Для иллюстративных целей шток арматуры снабжен отметками 126 уровня, которые выявляются датчиком 124. Однако, как указано в данной заявке в другом месте, положение запорного элемента 114 арматуры может быть определено различными способами, такими как, например, текущий контроль перемещения или положения зубьев шестерни или подсчет шагов, совершаемых шаговым двигателем, и т.д.
Во время работы, после того как выполнена балансировка арматуры 100 и с помощью электронной памяти запомнено значение величины ограничения степени открытия арматуры, блок 120 управления осуществляет управление арматурой. Средство 124 для определения положения, такое как показанное на фиг. 3 или другое, и/или блок 120 управления приспособлены для подачи выходного сигнала в цепь обратной связи. Выходной сигнал содержит информацию о текущем положении запорного элемента 114 арматуры, причем блок 120 управления приспособлен для приема входного сигнала от цепи обратной связи для осуществления корректировочного перемещения запорного элемента 114 арматуры, если текущее положение запорного элемента арматуры отклоняется от требуемого положения запорного элемента арматуры. Ввиду того, что значение величины ограничения степени открытия арматуры запомнено, блок 120 управления откалиброван так, что входной сигнал, характеризующий «максимальное открытие», будет вызывать открытие не до полностью открытого положения по фиг. 4а, а только до выбранного промежуточного положения (например, фиг. 4b).
Этот способ управления арматурой 100 может быть применен в системах распределения текучей среды различных типов, например таких, как распределительные системы
теплоснабжения/холодоснабжения (например, централизованные) или распределительные системы водоснабжения питьевой водой.
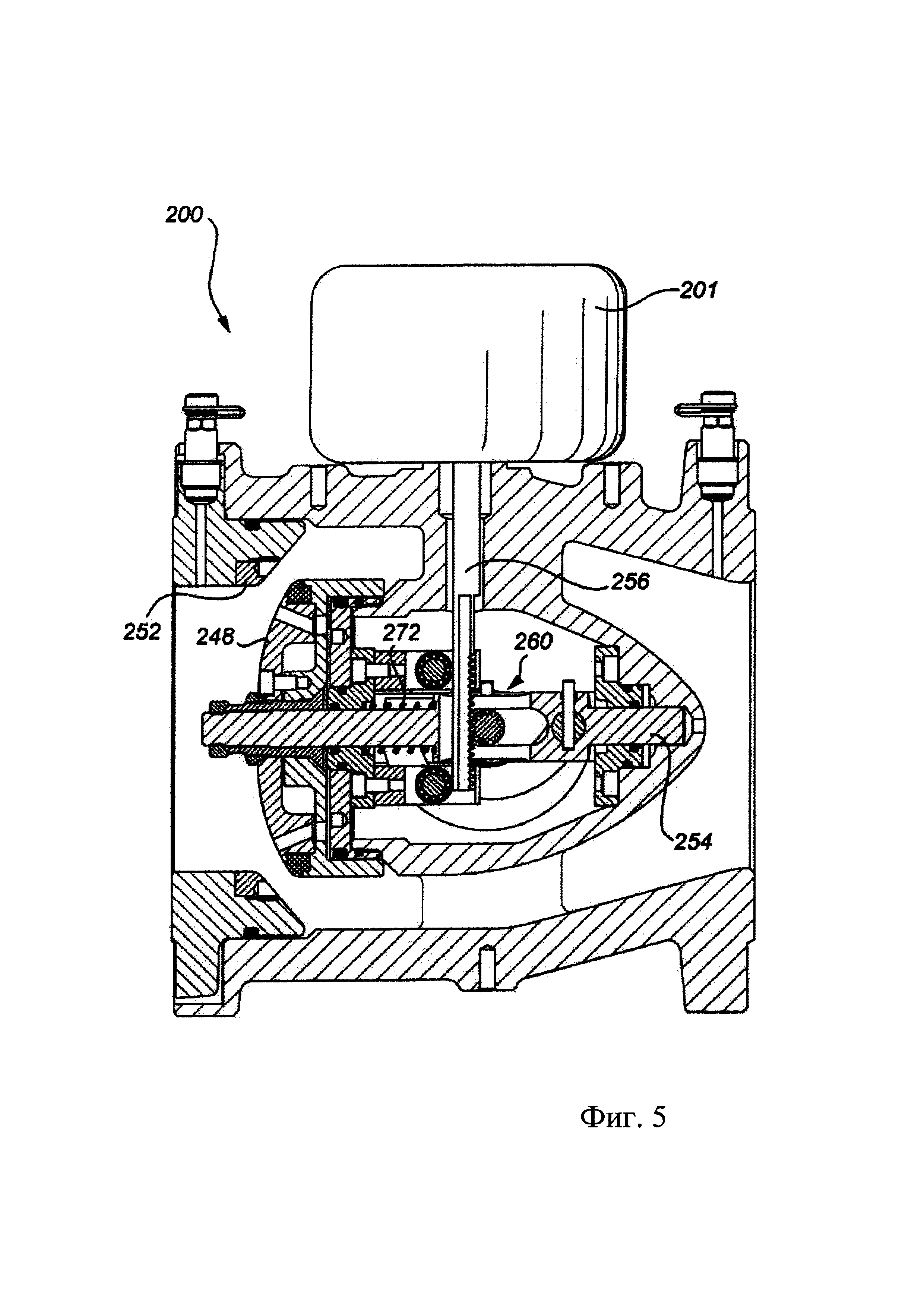
На фиг. 5 изображена арматура 200, частично в разрезе, согласно по меньшей мере одному иллюстративному варианту осуществления изобретательского замысла настоящего изобретения. Различие между этим иллюстративным вариантом осуществления и известной арматурой 40 по фиг. 2 заключается в предварительной установке. Таким образом, шток 256, кулачковый механизм 260, вал 254, седло 252 арматуры и пробка 248 (действующая как запорный элемент арматуры) и т.д. могут быть такими же (позиции по фиг. 2 увеличены на 200), как в известном техническом решении. Однако вариант осуществления по фиг. 5 не имеет механического упора (сравни механический упор 64 на фиг. 2).
На фиг. 5 и в других вариантах осуществления управление перемещением запорного элемента 248 арматуры осуществляется с помощью электронного устройства 201 управления. Электронное устройство 201 управления содержит блок управления и приводное устройство (не показаны), например электронное приводное устройство. На фиг. 5 шток 256 показан соединенным с электронным устройством 201 управления. Для балансировки арматуры 200 электронное устройство 201 управления запоминает в электронной памяти блока управления значение величины ограничения степени открытия арматуры. Это может быть осуществлено различными способами, упомянутыми в данной заявке выше. Например, когда запорный элемент 248 арматуры находится в таком положении, что получены требуемые характеристики потока для балансировки, это промежуточное положение будет соответствовать новому максимально допустимому открытию арматуры, и эта информация будет запомнена в электронной памяти в виде значения величины ограничения степени открытия арматуры. При дальнейшем управлении арматурой блок управления будет управлять приводным устройством так, что оно действует против силы упругости пружины 272, в результате чего запорный элемент 248 арматуры не будет перемещаться в сторону удаления от седла 252 дальше указанного промежуточного положения.
На фиг. 6 изображена арматура 300, частично в разрезе, согласно по меньшей мере еще одному иллюстративному варианту осуществления изобретательского замысла настоящего изобретения. Арматура 300 имеет входной патрубок 302 и выходной патрубок 304, а также находящийся между ними проточный канал 306. Арматура 300 содержит поворотный запорный элемент 308 арматуры. Здесь показан шаровой запорный элемент 308 арматуры. Однако другими возможными вариантами могут быть дроссельный запорный элемент арматуры или поворотные запорные элементы арматуры другого подходящего типа. В шаровом запорном элементе 308 арматуры имеется сквозное отверстие 310. Сквозное отверстие 310 может быть более или менее центрированным с проточным каналом 306, образующим отверстие, проходящее через шаровой запорный элемент 308 арматуры. Когда сквозное отверстие 310 полностью центрировано с проточным каналом 306, шаровой запорный элемент 308 арматуры находится в своем полностью открытом положении. Когда сквозное отверстие 310 обращено к стенке, ограничивающей проточный канал 306, так что текучая среда не может проходить через шаровой запорный арматурный элемент 308, он находится в своем закрытом положении. Аналогично описанию предыдущих вариантов осуществления, может быть предусмотрен блок управления (здесь показанный как составная часть электронного устройства 312 управления) для балансировки арматуры 300. Когда характеристика потока, такая как расход, находится на требуемом максимально допустимом уровне, угловое положение шарового запорного элемента 308 арматуры будет запомнено в виде значения величины ограничения степени открытия арматуры в электронной памяти блока управления. Во время работы арматуры будет осуществляться управление приводным устройством (соответственно тоже встроенным в электронное устройство 312 управления) с помощью блока управления, обеспечивающее возможность поворота шарового запорного элемента 308 арматуры между его закрытым положением и указанным угловым положением, которое запомнено в виде значения величины ограничения степени открытия арматуры (указанное угловое положение представляет собой промежуточное положение между закрытым положением и полностью открытым положением).
На фиг. 7 показан измерительный прибор 408, который функционально связан с арматурой 402, согласно по меньшей мере одному варианту осуществления изобретательского замысла настоящего изобретения. Арматура 402 показана установленной на трубопроводе 400 системы распределения текучей среды. Арматура 402 имеет два патрубка 412, 414, предназначенных для подсоединения трубопроводов соответственно 404, 406, прикрепленных к измерительному прибору 408. С помощью этого устройства измерительный прибор 408 получает информацию об одном или нескольких физических свойствах арматуры 402 или текучей среды в арматуре 402. Такими физическими свойствами могут быть, например, расход, давление, перепад давления, значение величины Kv, температура и/или степень открытия арматуры. При проведении балансировки/предварительной установки арматуры 402, максимальное открытие может основываться, например, на максимальном требуемом расходе и/или одном или нескольких из указанных других свойств.
Измерительный прибор 408 поддерживает связь беспроводным способом или по кабелю с портативным прибором 410, который предоставляет оператору информацию об измеренном физическом свойстве и/или о физическом свойстве, вычисленном исходя из измеренного свойства. После определения требуемого максимального открытия арматуры 402 оператор может, на основе результатов измерений, отрегулировать запорный элемент арматуры так, чтобы получить указанное максимальное открытие арматуры. Когда портативный прибор 410 показывает, что расход/перепад давления/значение величины Kv и т.д. для текучей среды, проходящей через арматуру 402, в настоящий момент находятся на предварительно заданном максимальном уровне, тогда положение запорного элемента арматуры запоминается в виде данных/программного значения в блоке управления (не показан), как указано в данной заявке выше. Портативный прибор 410 может устанавливать связь указанного положения (промежуточного положения) с блоком управления автоматически, когда достигнут предварительно заданный максимальный уровень физического свойства, и/или оператор может активно выдавать команды портативному прибору на посылку информации в блок управления. Другим возможным вариантом для пользователя будет подача указанной информации непосредственно в блок управления, например с помощью интерфейса пользователя, находящегося в блоке управления. Затем блок управления может работать таким образом, что осуществляет регулировку и введение коррекции на флуктуации или искажения в системе распределения текучей среды.
В каждом из описанных выше иллюстративных вариантов осуществления по фиг. 3-7 и в других вариантах осуществления после выполнения предварительной установки, то есть после запоминания значения величины ограничения степени открытия арматуры, в блок управления может поступать входной сигнал, содержащий информацию о требуемом положении между промежуточным положением (запомненном в виде значения величины ограничения степени открытия арматуры) и закрытым положением запорного элемента арматуры. Входной сигнал может представлять собой, например, сигнал управления, вводящий коррекцию на отклонения между требуемым и измеренным значениями физического свойства, как указано выше. Сигнал может быть цифровым, таким как сигнал данных, или аналоговым, таким как сигнал тока или напряжения. Вследствие предварительной установки блок управления откалиброван исходя из значения величины ограничения степени открытия арматуры. Таким образом, промежуточное положение будет считаться на 100% функциональным открытым положением. Таким образом, входной сигнал, требующий, чтобы арматура была открыта на 75%, будет интерпретирован как 75% открытости промежуточного положения. Следует понимать, что изобретательский замысел не ограничивается описанными иллюстративными вариантами осуществления; напротив, объем изобретения в общем определяется прилагаемой формулой изобретения.
Реферат
Группа изобретений относится к арматуростроению, в частности к арматуре, имеющей функцию балансировки, предназначенной для системы распределения текучей среды. Запорный элемент арматуры может перемещаться между закрытым положением и полностью открытым положением. Имеется приводное устройство, предназначенное для изменения положения запорного элемента арматуры. Имеется блок управления, который содержит электронную память, приспособленную для приема и запоминания значения величины ограничения степени открытия арматуры. Указанное значение величины ограничения степени открытия арматуры характеризует выбранное промежуточное положение между указанным закрытым положением и указанным полностью открытым положением запорного элемента арматуры. Блок управления управляет приводным устройством так, что ограничивает перемещение запорного элемента арматуры положениями от указанного закрытого положения до указанного выбранного промежуточного положения. Имеется арматурная система, содержащая такую арматуру, и способ управления арматурой. Группа изобретений направлена на упрощение конструкции и на упрощение управления арматурой, имеющей функцию балансировки. 3 н. и 11 з.п. ф-лы, 10 ил.
Формула
Документы, цитированные в отчёте о поиске
Отверстия регулирования расхода для терморегулирующего смесительного вентиля
Комментарии