1
Изобретение относится к прокатному
производству, а именно к конструкциям прокатных валков с регулируемым прогибомд
Известен валок с регулируемым прогибом , содержащий неподвижную балку с
насаженным на нее с гарантированным зазором бандажом, установленным с воз
мощностью перемещения в диаметрально перпендикулярных направлениях относительно
балки, и размещенные вдоль бал ки подвижные гидростатические опоры с регуляторами давления „
Недостаток этого валка заключается в том, что в нем не представляется
Возмохчным корректировать положение бандах а в случаях его отклонения от
заданного номинального положения.
Целью изобретения является обеспечение
возмох ности корректировки положения бандажа при его отклонении от заданного номинального положения„
Поставленная цель достигается тем, что валок с регулируемым прогибом,
содержащий неподвижную балку с насаженным на нее с гарантированным зазором
банда ; ом, установленным с возможностью перемещения в диаметрально
перпендикулярных направлениях относительно балки, и размещенные вдоль балки
подвижные гидростатические опоры с регуляторами давления, снабжен датчиками
радиального положения бандажа, относительно балки, установленными по
его концевы частям и связанными с регуляторами давления .
Каждый датчик положения соединен с половиной регуляторов давления,
обращенных к нему подвижных гидростатических опор, считая от центра валка .
При этом Каждый датчик положения соединен по меньшей мере с двумя регуляторами
давления указанных опор, взаимодействующих со смежными с ним
концевыми частями бандажа.
Кроме того, каждый датчик положения
дополнительно соединен с регуляторами давления указанных опор, размещенных
по другую сторону от центра
валка так, что регуляторы давления
опор одной половины валка соединены с датчиком поло хения, установленным
на противоположной концевой части бандажа, а регуляторы давления опор
второй половины валка соответственно соединены с другим датчиком положения
Причем подвижные гидростатические опоры смонтированы предпочтительно
в одной плоскости, перпендикулярной оси прокатки, а концевые части бандажа
снабжены направляющими, выполненными параллельно плоскости прокатки
На фиг. 1 изображен предлагаемый
валок в паре со смежным монолитным
валком, общий вид; на фиг.. 2 - концевая часть валка на фиг..- 1, продольный
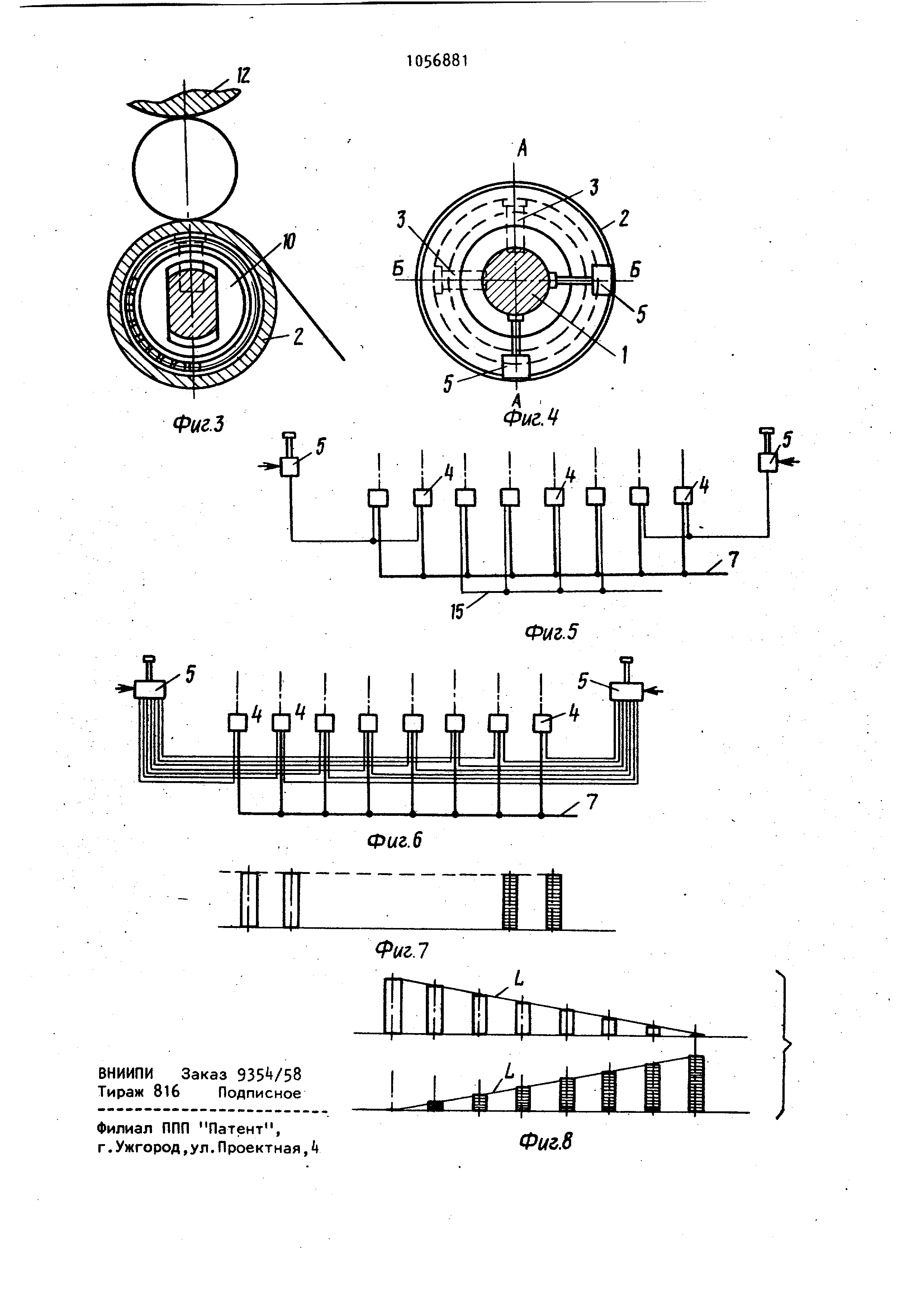
разрез; на фиг, 3 концевая (опорнаяу часть валка на фиг, 2, поперечный разрез; на фиг, 4 - то же,
вариант выполнения; на фиг. 5 - схема взаимосвязи датчиков положения с регуляторами давления; на фиг, 6 схема взаимосвязи датчиков положения
с регуляторами полохсения, вариант выполнения; на фиг о 7 и 8 - диаграммы работы схем на фиг„ 5 и 6
Предложенный валок состоит из неподвижной балки 1, на которую насажен
с гарантированным зазором бандал 2. В балке 1 расположены подвижные гидростатические опоры 3, к которым
от источника высокого давления подводится рабочая жидкость через регуляторы k давленияо По концевым час
тям балки. 1 установлены датчики 5, предназначенные для определения радиального
положения бандажа 2 относительно балки. Датчики 5 положения соединены сигнальными проводами бис
регуляторами , которые через дроссальные клапаны /не показаны) воздействуют
на давление рабочей жидкости, подводимой через трубопровод 7, Каждая
опора 3 перемещается в цилиндрической расточке 8, связанной через
подводящий канал 9 с соответствующей ветвью трубопровода 7Балка 1 снабжена втулкой 10, на
которую через подшипники 11 оперт бандаж 2„ Полость между втулкой 10 и
бандажом 2 герметизирована посредством уплотнительного кольца 12 и шайбы
13. На втулке 10 выполнены направляющие , взаимодействующие с направляющими
балки 1, для обеспечения возможности перемещения бандажа в плоскости прокатки.,
В варианте изобретения указанные направляющие могут отсутствовать, т.,е
бандаж будет иметь возможность перемещения во всех радиальных направлениях
, для этого валок должен быть снабжен по меньшей мере двумя рядами
гидростатических опор 3, причем каждый ряд снабжен датчиками 5- Силы
реакции опор 3 должны действовать в плоскостях А-Л или Б-Б, однако это
не означает, что сами оси этих опор должны располагаться в этих же плоскостях;
опоры 3 могуты быть расположеiHu , например, V -образно двумя рядами
симметрично относительно плоскости
Л-А, необходимо чтобы результирующая
их сил реакции действовала в плоскости А-Л или Б-Б,
Датчики 5 положения могут быть выполнены электромагнитными или в
виде гидравлических управляющих золотников .
Предлагаемый валок предназначен преимущественно для комплектования
валковой пары со сплошным валком Ц, В зависимости от требуемого характера
распределения межвалкового давления , а также корректировки положения
бандажа относительно исходного номинального положения, изменяющегося в
зависимости от распределения межвалкового давления по длине бочки, исползуют
предлагаемые схемы соединения датчиков 5 положения с регулятораiw | давления подвижных опор 3. При
прокатке действующие на бандаж 2 силы воспринимаются опорными элементами
3, опирающимися при этом Через гидравлическую сжатую среду на балку ,
Давление гидравлической среды регулируется при этом регуляторами , а
именно в том направлении, чтобы поддерживалось заданное положение, заданное
сигналом заданной величины. Если, например, концевые части бандажа
2 должны отклоняться под влиянием действующего на бандаж, давления
прокатки вниз, то посредством регуляторов гидравлическое давление среды
и тем самым опорная сила повышаются. Если один из концов или оба конца оболочки
движутся вверх, т,е, преодолевают силу реакций, то давление в соответствующих
цилиндрах опор 3 снижается .
Так, в варианте исполнения согласно
фиг. 1 каждому датчику 5 положения приданы регуляторы Ц обращенной
к нему половины валка, т.е. левому датчику 5 положения - четыре регулятора
4 левой половины, правому датчику положения - четыре регулятора 4
правой половины валка. Регулирование может производиться таким образом,
чтобы заданные значения, подводимые от датчиков положения отдельным регултором
k, были равны. Однако они могут также быть различными, а именно
преимущественно со снижением интенсивности по мере удаления от конца, на
котором находится соответствующий датчик положения.
В варианте исполнения схемы согласно фиг, 5 датчики положения воздействуют
только на регуляторы наружных опорных элементов или групп опорных
элементов. Таким образом, в форме исполнения согласно фиг, 5, регуляторы
средних опорных элементов 3 не 1подвергаются воздействию датчиков 5
положения. Эти регуляторы могут вергаться воздействию собственных управляющих линий 1S в зависимости от
принципе работы прокатного стана. В схеме согласно фиг« 6 из восьми регуляторов семь присоединены к
датчикам 5 положения одной стороны. При этом всегда остается незадействованным
только регулятор Ц, приданный наиболее удаленному от датчика полоМения опорному элементу.
Так, согласно фиг. 7, воздействие силы реакции опорных элементов 3, приданных соответствующему датчику
попожения происходит одинаковым образом . -Другими словами, изменения силы
, вызванные датчиком положения, в четырех опорах 3 или регуляторах
одной стороны по фиг. 1 и 5 одинаковы На фиг. 8 регуляторы Ц и через
них гидростатические опоры 3 подвергаются неодинаковому воздействию, а
именно со снижением интенсивности с возрастанием расстояния от соответст15 IZ /(/п /1
Фиг.2 1 вующего датчика 5 положения. В форме
исполнения согласно фиг. 8 зависимость при этом линейная, как показано
прямыми линиямиL п Однако представляется , что возможны также другие
зависимости, например меньшее перекрытие или также нелинейный характер кривых I .
Датчик 5 положения имеет назначение определять положение оболочки относительно его тела, С этой
целью он может быть соединен, как изображено на фиг. 1, непосредственно
с телом валка 1 и оболочкой валка или ее втулкой 10. Такое исполнение изображено на фиг 1. Однако
часть датчика положения может также находиться в соединении с конструкционной
деталью, жестко связанной с балкой . Так, например, согласно фиг. 2
корпус датчика 5 положения закреплен на станине, в то время как его подвижная
часть соединена со вtyлкoй 10.
1056881
Фиг.5
I I л I
X
Фиг. 5
Фиг .6




Комментарии