Упаковочное устройство и система сортировки для направленного упаковывания продуктов и способ упаковывания - RU2721093C2
Код документа: RU2721093C2
Чертежи




Описание
Изобретение относится к упаковочному устройству, посредством которого продукты, например овощи и фрукты, включая яблоки, персики и томаты, и другие пищевые продукты, например, конфеты и другие кондитерские изделия, можно помещать в упаковку или контейнер направленным способом. Направленное упаковывание относится здесь к размещению продуктов в упаковке с требуемой ориентацией.
Требования на практике заключаются в том, что продукты должны быть размещены в упаковках или контейнерах, включая коробки и лотки, со специальной пространственной ориентацией и позиционированием, чтобы, таким образом, продукты были представлены потребителю визуально привлекательным образом. Яблоки, таким образом, например, обычно укладывают осями чашечки и плодоножки, по существу, в горизонтальной плоскости, располагая в том же направлении, что и другие продукты в упаковке. В случае, если яблоки содержат румяное место, т.е. дополнительное красное пятно на одной стороне, то это румяное место обычно помещают в упаковке таким образом, чтобы оно было обращено вверх. На практике такое направленное упаковывание продуктов выполняют преимущественно вручную, что влечет за собой дополнительные затраты. При этом также с продуктом производят дополнительные операции, наличие которых ведет к увеличению риска повреждения этих продуктов.
В документе NL 2002866 описаны направляющее устройство и упаковочное устройство, обеспеченное вместе с ним, причем направляющее устройство обеспечено системами подачи к позиции и выгрузки из позиции продуктов, где продукт может лежать, при этом позицию расположения формируют посредством по меньшей мере трех вращаемых контактных элементов, каждый элемент отдельно обеспечен вращающим валом таким образом, чтобы контактным элементам передавалось вращение. Благодаря индивидуальному приводу контактных элементов обеспечивается возможность ориентации продуктов требуемым образом перед позиционированием продукта таким образом, чтобы этот продукт мог быть захвачен в требуемом положении. Для размещения продукта в упаковке контактные элементы приводят или, наоборот, удерживают в неподвижном состоянии координированным образом. Для этого требуется некоторое время обработки.
Задачей изобретения является создание упаковочного устройства, с помощью которого обеспечивалась бы возможность эффективного направленного упаковывания продукта и при использовании которого были бы исключены по меньшей мере один или большее количество указанных выше недостатков, например, сокращены дополнительные операции, риск повреждения продукта и требуемое время обработки.
Эту задачу решают благодаря использованию упаковочного устройства для направленного упаковывания продуктов, таких как овощи и фрукты, согласно изобретению, включающего в себя:
– сенсорную систему, выполненную с возможностью определения набора пригодных мест захвата продукта для упаковывания;
– по меньшей мере один направляющий блок, функционально связанный с сенсорной системой и выполненный с возможностью направления продукта таким образом, чтобы по меньшей мере одно пригодное место захвата находилось в рабочем диапазоне манипулятора, при этом направляющий блок обеспечен по меньшей мере одной степенью свободы для вращения продукта вокруг, по существу, горизонтальной оси вращения; и
– манипулятор, содержащий:
– элемент для захвата, выполненный с возможностью захвата продукта из направляющего блока; и
– перемещающее устройство, на внешнем конце или вблизи внешнего конца которого расположен элемент для захвата, имеющее по меньшей мере четыре степени свободы, для переноса продукта и вращения его вокруг, по существу, горизонтальной оси вращения;
причем вращение продукта вокруг, по существу, вертикальной оси вращения возможно посредством обеспечения перемещающего устройства по меньшей мере пятью степенями свободы и/или обеспечения направляющего блока второй степенью свободы так, чтобы посредством перемещающего устройства можно было захватывать продукт и укладывать его с требуемой ориентацией в упаковку или контейнер.
Посредством, например, питающего конвейера, продукты подают к направляющему блоку упаковочного устройства, который функционально связан с конвейером. В требуемой позиции или позициях направляющего блока определяют с использованием сенсорной системы набор пригодных мест захвата продукта для упаковывания.
Место захвата определяют как точку или место продукта, в котором продукт может быть захвачен манипулятором. Пригодным местом захвата является точка на продукте, которая была определена как место, где продукт может быть захвачен манипулятором таким образом, чтобы продукт можно было обработать требуемым образом.
Наиболее пригодное место захвата из набора пригодных мест захвата особенно предпочтительно определяют с использованием сенсорной системы. Продукт направляют, особенно поворачивая его с помощью направляющего блока таким образом, чтобы по меньшей мере одно из пригодных мест захвата, а предпочтительно – наиболее пригодное место захвата, было введено в рабочий диапазон манипулятора; это означает, что манипулятор может захватить соответствующий продукт в этом пригодном месте захвата. В упаковочном устройстве согласно изобретению манипулятор обеспечен элементом для захвата для захвата продукта из направляющего блока, которым можно захватывать продукты и укладывать их в упаковку или контейнер, например, коробку или лоток, или ящик, с требуемой ориентацией. Манипулятор может быть обеспечен, если это требуется, множеством элементов для захвата, например, двумя, тремя или четырьмя элементами для захвата. Также возможно обеспечение одного направляющего блока множеством манипуляторов или обеспечение множества направляющих блоков одним манипулятором.
Введение одного из пригодных мест захвата продукта в рабочий диапазон манипулятора, особенно – позиционирование продукта таким образом, чтобы манипулятор мог захватить продукт быстро и правильно, позволяет упростить и процесс направления, и процесс захвата. Это ведет к увеличению скорости обработки и/или к сокращению риска нарушения функционирования в сравнении с обычными системами. Это происходит, потому что комплексное позиционирование продукта до захвата больше не требуется. Кроме того, можно ограничить сложность направляющего блока, конечно, в сравнении с упомянутыми обычными системами.
Продуктами для направления предпочтительно являются овощи и фрукты, и картофель. Продукты предпочтительно являются продуктами, которые являются в некоторой степени округлыми, например: яблоки, груши, персики, томаты и экзотические продукты, для которых требуется направленное упаковывание, т.е. они должны быть помещены в упаковку или контейнер с одинаковой ориентацией. Например, обычно требуется, чтобы плодоножки были направлены в одном и том же направлении в упаковке. В случае упаковывания, например, яблок, румяные места дополнительно предпочтительно ориентируют идентично в упаковке. Дополнительно можно, согласно изобретению, принимать в расчет разброс размеров продуктов. Требуемое положение в упаковке может, таким образом, быть, например, определено в зависимости от размеров продукта. Этим можно, например, предотвратить укладку крупных продуктов вблизи друг друга и повреждение соседних продуктов во время позиционирования. Благодаря этому сохраняют качество продуктов и исключают возможное их повреждение. Также можно использовать упаковочное устройство согласно изобретению для упаковывания других пищевых продуктов, например, конфет и других кондитерских изделий, и других продуктов.
Упаковка или контейнер относятся к большому числу возможных средств для упаковывания, например: картонных коробок, деревянных ящиков, бочонков из синтетического материала, пластмассовых туб, упаковочных лотков с предварительно сформированными углублениями из синтетического материала, картона, бумажной массы и других возможных упаковок и упаковочных материалов. Примером упаковочного лотка может служить сотовая конструкция, например, в которой имеется 7 пространств по горизонтали и 5 – по вертикали.
Направляющий блок дополнительно предпочтительно используют для обеспечения возможности осуществления с помощью сенсорной системы измерения продукта, благодаря чему становится возможным определение позиций плодоножки, чашечки и румяного места, а также, где это возможно, ориентации других характерных признаков продукта. После выполнения этих измерений может быть определен набор пригодных мест захвата, и, предпочтительно с минимальным перемещением продукта, этот продукт может быть уложен на направляющий блок требуемым образом, пригодным для захвата манипулятором. Операции, выполняемые с продуктом, при этом остаются ограниченными, благодаря чему предотвращают повреждение этих продуктов. Кроме того, возможно, чтобы с помощью сенсорной системы осуществлялся (дополнительно) контроль качества продуктов. Непригодные продукты при этом отбирают и не помещают в предназначенную упаковку.
Сенсорная система содержит, например, камеру и/или один или большее количество других датчиков, например, датчиков для измерения на основе различных длин волн, например, ультрафиолетового излучения (УФИ), инфракрасного излучения (ИК) и/или видимого света. Можно также использовать датчики, испускающие ультразвуковую вибрацию во время измерения. Можно также использовать много типов датчиков.
В предпочтительном в настоящее время варианте осуществления сенсорная система содержит систему с датчиками. Было установлено, что положение плодоножки, чашечки, румяного места или другой характерной особенности продукта может быть определено эффективным способом при использовании такой камеры. В течение времени перемещения продукта предпочтительно производят множество записей, в результате чего получают общий вид поверхности продукта. Затем может быть определен по этому общему виду набор пригодных мест захвата. Сенсорная система предпочтительно предназначена для достижения этой цели с использованием процессорного блока, выполненного с возможностью обработки информации, полученной о продукте, и для определения набора пригодных мест захвата. В предпочтительном в настоящее время варианте осуществления при этом определяют с помощью сенсорной системы одну (или большее количество) качественных особенностей. При этом может быть определен следующий требуемый этап обработки соответствующего продукта. Это относится, например, к отдельно выгруженному продукту неудовлетворительного качества и/или к определению предназначенного положения для укладки продукта в упаковке или контейнере.
В одном из предпочтительных в настоящее время вариантов осуществления согласно изобретению сенсорная система также выполнена с возможностью:
– определения состояния, положения и/или ориентации упаковки или контейнера, или их части; и/или
– определения возможных положений укладки в упаковке или контейнере; и/или
– определения доступных положений укладки в упаковке или контейнере; и/или
– определения состояния, положения и/или ориентации недавно уложенных продуктов в упаковке или контейнере; и/или
– проверки того, полностью ли заполнены упаковка или контейнер после их заполнения.
Сенсорная система может быть дополнительно обеспечена датчиками или детекторами для осуществления этих этапов или задач. Благодаря обеспечению сенсорной системы процессорным блоком обеспечивается возможность, таким образом, обработки полученной информации, и, например, на основе этого, возможность посылки сигналов к другим компонентам упаковочного устройства или другим частям упаковочной линии. Таким образом, эффективно реализуют процесс упаковывания продуктов. Сигнал тревоги или сигнал предупреждения о возможных неполадках предпочтительно генерируется в случае ошибки или неоптимальной укладки/позиционирования продукта в упаковке или контейнере. Если требуется, то может последовать корректирующая операция, например, осуществляемая манипулятором. При этом может быть дополнительно предотвращено оставление упаковочным устройством упаковки или контейнера с незанятыми местами для продуктов. Возможно также осуществление проверки того, действительно ли доступно предназначенное место для укладки и не занято ли оно уже другим продуктом. При этом предотвращаются удары и возможное повреждение продукта.
В дополнение к элементу для захвата, манипулятор содержит перемещающее устройство, имеющее по меньшей мере четыре степени свободы такие, чтобы после захвата продукт можно было перемещать с направляющего блока в упаковку и можно было ориентировать продукт согласно требуемому положению в такой упаковке. С помощью манипулятора при этом можно осуществлять перенос продукта в пространстве, т.е. перемещение вдоль так называемых осей: X, Y и Z. С помощью манипулятора можно также осуществлять вращение продукта вокруг, по существу, горизонтальной оси вращения.
В первом и предпочтительном в настоящее время варианте осуществления согласно изобретению направляющий блок имеет (предпочтительно ровно) одну степень свободы для обеспечения возможности вращения продукта вокруг, по существу, горизонтальной оси вращения. Манипулятором, который, таким образом, имеет по меньшей мере 5 степеней свободы в этом варианте осуществления может быть реализовано вращение вокруг, по существу, вертикальной оси вращения,
В альтернативном варианте осуществления согласно изобретению вращение продукта вокруг, по существу, горизонтальной оси вращения и, по существу, вертикальной оси вращения реализуют посредством обеспечения направляющего блока (предпочтительно ровно) двумя степенями свободы. Это означает, что с помощью направляющего блока можно поворачивать продукт вокруг, по существу, горизонтальной и, по существу, вертикальной осей вращения. В этом варианте осуществления манипулятор имеет по меньшей мере 4 степени свободы для переноса продукта и вращения продукта вокруг, по существу, горизонтальной оси вращения.
Согласно изобретению, манипулятор обеспечен значительным количеством степеней свободы, особенно – по меньшей мере четырьмя степенями свободы или, в другом предпочтительном в настоящее время варианте осуществления, – по меньшей мере пятью степенями свободы, для ориентации продукта с помощью манипулятора. Направляющий блок, таким образом, функционирует, по существу, с целью расположения по меньшей мере одного из пригодных мест захвата в рабочем диапазоне манипулятора, в предпочтительном в настоящее время варианте осуществления, соответствующего верхней полусфере, особенно верхней полусфере продукта, лежащего на направляющем блоке; это согласно способу, при котором элемент для захвата манипулятора может достичь такого места захвата. Перемещения, которые должны быть произведены манипулятором для захвата продукта с последующим расположением его в упаковке направленным способом, определяются посредством использования информации, полученной о продукте.
Благодаря тому, что манипулятору предоставлено по меньшей мере пять степеней свободы, обеспечивается возможность ориентации продукта этим манипулятором. В предпочтительном в настоящее время варианте осуществления манипулятор может с этой целью осуществлять перемещения в трехмерном пространстве, как уже было пояснено выше, вдоль так называемых осей X-Y-Z, т.е. в горизонтальной плоскости и по высоте. Манипулятор, кроме того, можно вращать вокруг двух осей вращения, в предпочтительном в настоящее время варианте осуществления, по существу, относительно вертикальной оси вращения и, по существу, относительно горизонтальной оси вращения.
Должно быть понятно, что возможны также и другие конфигурации манипулятора с по меньшей мере пятью степенями свободы.
Таким образом, можно перемещать упаковку или контейнер в содействии с элементом для захвата, например, в, по существу, вертикальном направлении, таким образом, чтобы при объединенном перемещении элементов для захвата и упаковки по меньшей мере пять степеней свободы также (опосредованно) было предоставлено с целью размещения продукта в упаковке или контейнере эффективным и направленным способом. Упаковочное устройство предпочтительно дополнительно обеспечено автоматической системой питания и выгрузки упаковок или контейнеров. При этом может быть обеспечен эффективный процесс упаковки.
Было установлено, что вариант осуществления, в котором манипулятор наделен по меньшей мере 5 степенями свободы, т.е. возможностью перемещения вдоль осей X-Y-Z и вокруг двух осей вращения, в настоящее время является предпочтительным. В этом варианте осуществления на упаковочной линии может быть реализована высокая скорость обработки при упаковке предназначенных для этого продуктов. Благодаря этому повышают до максимума производительность упаковочной линии, обеспечивая в результате эффективный процесс упаковывания.
Преимущество упаковочного устройства согласно изобретению заключается в том, что после осуществления измерения с использованием сенсорной системы, требуется только произвести в ограниченной мере позиционирование продукта с помощью направляющего блока, так как требуется реализовать только одно из пригодных мест захвата в верхней полусфере. После этого продукт может быть захвачен и правильно сориентирован манипулятором. При этом достигается значительное сокращение времени. При использовании обычного направляющего блока, предназначенного для направленного упаковывания продуктов, может, таким образом, например, потребоваться период времени, составляющий от около 5 секунд до 10 секунд на один продукт. Располагая манипулятором, осуществляющим ориентирование продукта с целью направленного упаковывания, можно достигать того же результата в течение периода времени, составляющего, например, 1-2 секунды, на устройстве, идентичном в других отношениях. Должно быть понятно, что это значительное сокращение требующегося времени ведет к значительному повышению производительности всей упаковочной линии, что ведет к сокращению стоимости упаковывания. Кроме того, более высокая эффективность достигается благодаря тому, что та же производительность может быть обеспечена при использовании меньшего количества направляющих блоков.
В благоприятном предпочтительном варианте осуществления согласно изобретению по меньшей мере один направляющий блок обеспечен ровно одной степенью свободы для вращения продукта, причем продукт может быть повернут вокруг оси вращения.
Посредством обеспечения по меньшей мере одного направляющего блока, обладающего ровно одной степенью свободы для направления, направляющий блок может принять относительно простую форму. Направляющий блок может при этом (более конкретно) принять относительно простую форму, в сравнении с более сложными обычными направляющими блоками. Так как ориентирование продукта с целью направленного упаковывания осуществляют в существенной мере с помощью манипулятора, то дополнительно можно в достаточной степени обеспечить это посредством вращения продукта вокруг оси вращения таким образом, чтобы по меньшей мере одно пригодное место захвата из набора мест захвата было введено в верхнюю полусферу или по меньшей мере – в рабочий диапазон манипулятора. В дополнение к значительному сокращению времени, требующемуся для позиционирования продукта на направляющем блоке, дополнительно исключают так называемое повреждение из-за трения. Такое повреждение из-за трения может происходить в результате восприимчивости продуктов при их вращении вдоль контактного элемента, который неподвижен или который перемещают с другой скоростью. Такое повреждение из-за трения оказывает неблагоприятное воздействие на качество продукта. Конечно, в случае укладки продуктов, не имеющих оптимально округлую форму, т.е. продуктов, имеющих нерегулярную форму, например, натуральных продуктов, например, овощей и фруктов, было установлено, что вполне можно на практике перемещать эти продукты на направляющем блоке вокруг оси вращения, наиболее пригодной для этого, тогда как перемещение в других направлениях приводит в результате к дополнительным соударениям продукта с направляющим блоком, особенно – с его контактными элементами, что может приводить в результате к повреждению этих продуктов от ударов. Эти повреждения также оказывают неблагоприятное воздействие на качество продуктов. При использовании упаковочного устройства согласно изобретению с ограниченной свободой перемещения в направляющем блоке в сочетании с манипулятором, обладающим по меньшей мере пятью степенями свободы, можно, таким образом, исключить снижение качества во время направленного упаковывания продуктов.
В предпочтительном в настоящее время варианте осуществления направляющий блок содержит два желобчатых катка, которые вместе несут продукт и могут, если требуется, вращаться вокруг оси вращения, проходящей, по существу, в горизонтальном направлении. Продукты при этом предпочтительно помещают на направляющий блок посредством блока дозирования на пару из двух желобчатых катков. Другими словами, продукты предпочтительно помещают в чередующемся порядке на ряде желобчатых катков, и продукт в результате в каждом случае укладывается таким образом, что после него следует свободное место. Благодаря этому обеспечивается возможность даже лучшего контроля направляющего процесса.
Дополнительное конкретное преимущество упаковочного устройства согласно изобретению заключается в том, что возможны также другие распределения направленного упаковывания. Таким образом, например, можно с помощью манипулятора укладывать продукты в упаковку таким образом, чтобы румяное место было обращено в чередующемся порядке вверх и вниз, и, таким образом, получать вид распределения в шахматном порядке в упаковке. Должно быть понятно, что и другие распределения с таким румянцем могут быть также реализованы в упаковке, включающей фирменный логотип, символы, идентифицирующие продукт, и т.п. Можно также варьировать ось чашечки и плодоножки в упаковке в контролируемым образом, по выбору в сочетании с варьированием в направлении румяного места. Дополнительные визуальные эффекты могут быть при этом представлены потребителю с использованием направленного упаковывания. Можно также комбинировать различные продукты в упаковке, например, ряд яблок и ряд апельсинов в одной упаковке.
Согласно варианту осуществления согласно изобретению элемент для захвата обеспечен средствами оказания давления, выполненными с возможностью обеспечения разрежения, таким образом, чтобы продукт мог быть захвачен. Это выполняют, например, с помощью одной или более чашечных присосок.
Хотя в альтернативном варианте осуществления продукт может быть также захвачен манипулятором в упаковочном устройстве согласно изобретению с использованием механического зажимного механизма, например, в форме механического зажима; в настоящее время предпочтительно использовать элемент для захвата, обеспеченный средствами оказания давления, для обеспечения разрежения, также называемыми на практике вакуумными средствами. Было установлено, что продукт можно при их использовании захватывать и перемещать эффективным образом.
Элемент для захвата предпочтительно выполнен с возможностью осуществления одной или большего количества дополнительных задач, например:
– захвата продукта из направляющего блока с использованием элемента для захвата; и/или
– очистки, очистки с использованием щетки, очистки с использованием обдува сжатым воздухом и/или очистки другим способом компонентов упаковочного устройства с использованием элемента для захвата; и/или
– захвата, манипулирования и/или позиционирования упаковки или контейнера; и/или компонента упаковки или контейнера с использованием элемента для захвата; и/или
– обеспечения продукта воском или другим покрытием с использованием элемента для захвата.
Благодаря этому дополнительно повышается, в частности, эффективность элемента для захвата. В дополнение к обдуву и/или очистки продуктов с использованием щетки, можно также перемещать множество продуктов одновременно, используя манипулятор. Для этого один манипулятор может быть, например, обеспечен множеством элементов для захвата. Благодаря этому может быть дополнительно повышена эффективность.
Элемент для захвата предпочтительно обеспечен детектором продукта, выполненным с возможностью определения зажима элемента для захвата на продукте. Посредством такого детектора измеряют, например, разрежение в элементе для захвата таким образом, чтобы можно было определять, с одной стороны, удерживается ли продукт в данный момент, а, с другой стороны, – на сколько надежно удерживается продукт. Скорость перемещения манипулятора может быть, таким образом, например, увеличена, если определено, что продукт удерживается надежно, посредством чего производительность всего упаковочного устройства может быть аналогичным образом увеличена. И наоборот, скорость перемещения может быть в некоторой степени понижена в случае, например, высокой восприимчивости продукта, или в случае укладки нерегулярно сформированного продукта, для предотвращения высвобождения продуктов, которые были захвачены элементом для захвата во время перемещения манипулятора.
Элемент для захвата дополнительно предпочтительно обеспечен стабилизирующим элементом, например, в виде стопора или стабилизатора, и выполнен с возможностью дополнительного поддерживания захваченного продукта во время его перемещения элементом для захвата. Посредством обеспечения разрежения, называемого вакуумом, продукт при его присасывании элементом для захвата перемещается при этом в некоторой степени к элементу для захвата. Во время последующего перемещения манипулятора к продукту прикладывают силу в элементе для захвата. Благодаря обеспечению дополнительного стопора или стабилизатора, который функционирует как дополнительная опора, гарантированно обеспечивают условия, при которых продукт в элементе для захвата остается в стабильном и безопасном состоянии. Такой стопор может быть выполнен в виде одного или большего количества кулачков, кольца на периферии элемента для захвата, где край или емкость, могут быть сформированы пригодным в других случаях образом. С помощью стабилизатора исключают «раскачивание» продуктов. Конструкцию стабилизатора приспосабливают к продукту таким образом, чтобы было исключено повреждение продукта во время стабилизации. Качество продукта при этом сохраняется.
Благодаря обеспечению стабилизирующего элемента предпочтительно в виде описанного выше стопорного элемента, выполненного таким образом, чтобы при захвате продукта средства оказания давления, особенно вакуумные средства, или чашечная присоска, перемещалась внутрь к стопорному элементу, чтобы продукт мог быть перемещен более стабильным образом. Благодаря этому предотвращается повреждение продукта и/или увеличивается скорость обработки.
В дополнительном, преимущественном, предпочтительном варианте осуществления изобретения упаковочное устройство дополнительно содержит перемещающее устройство для обеспечения относительного перемещения или перемещения между позицией измерения, где продукт может быть измерен с использованием сенсорной системы, и позицией захвата, где продукт может быть захвачен манипулятором.
Благодаря обеспечению перемещающего устройства достигаются условия, при которых продукт для захвата может быть захвачен из направляющего блока эффективным способом с помощью элемента для захвата манипулятора без использования сенсорной системы, которая при этом заблокирована, или сенсорная система препятствует работе манипулятора при захвате продукта. Скорость обработки продукта манипулятором может быть дополнительно повышена посредством обеспечения такого перемещающего устройства. При этом можно перемещать направляющий блок на некоторое расстояние или, наоборот, перемещать сенсорную систему на некоторое расстояние, или обеспечивать комбинированное перемещение. В предпочтительном в настоящее время варианте осуществления требуемое расстояние составляет около 20-30 см. Благодаря тому, что это расстояние является относительно ограниченным, элементу для захвата манипулятора может быть предоставлен доступ в течение очень короткого периода времени и пригодным образом к продукту, подлежащему захвату с направляющего блока. Должно быть понятно, что другие расстояния также возможны, что также зависит от конфигурации упаковочного устройства согласно изобретению.
Перемещающее устройство может быть обеспечено в различных вариантах осуществления, например, посредством перемещения направляющего блока с использованием направляющей или посредством обеспечения возможности непрерывного перемещения продуктов с использованием бесконечного ряда направляющих элементов, например, в виде цепи. Должно быть понятно, что также возможны и другие варианты осуществления.
В предпочтительном в настоящее время варианте осуществления применяется бесконечный ряд направляющих блоков, который, например, продвигают посредством цепи и привода. Отдельный направляющий блок предпочтительно содержит два желобчатых катка для обеспечения возможности направления, подлежащего осуществлению. Ряд желобчатых катков, таким образом, получают в таком варианте осуществления, где продукты укладывают в чередующемся порядке в положения между желобчатыми катками. Было установлено, что благодаря этому осуществляют стабильную обработку продуктов с относительно высокой скоростью.
В дополнительном, преимущественном, предпочтительном варианте осуществления изобретения упаковочное устройство содержит по меньшей мере два направляющих блока и оптимизатор, выполненный с возможностью определения порядка продуктов, подлежащих захвату, и/или позиции для укладки захваченных продуктов в упаковке или контейнере.
Производительность упаковочного устройства может быть дополнительно повышена посредством обеспечения множества направляющих блоков в манипуляторе. С помощью оптимизатора можно дополнительно в каждом случае выбирать продукт, подлежащий захвату, на одном из направляющих блоков, который должен быть следующим продуктом, подлежащим укладке в упаковку или контейнер. Можно также использовать оптимизатор в системе, по выбору, содержащей только один направляющий блок, в которой может быть отобрана требуемая позиция для укладки продукта, фасуемого в данный момент. С помощью оптимизатора можно, таким образом, например, оптимально распределять или группировать продукты одинакового размера в упаковке или контейнере. Это также справедливо в отношении других характеристик продукта, включающих интенсивность окраски продукта, формы продукта и т.п. Благодаря этому можно дополнительно оптимизировать, например, визуальные особенности упаковки с направленными продуктами. Этим способом могут быть также оптимизированы и другие качественные особенности. Если требуется, то можно использовать множество направляющих блоков, установленных параллельно и/или последовательно. Направляющий блок может при этом также выполнять функцию транспортировки посредством использования множества приводных роликов, дисков, желобчатых катков или других пригодных элементов. При этом могут быть объединены отбор образцов и их транспортировка.
В дополнительном, преимущественном, предпочтительном варианте осуществления согласно изобретению обеспечен датчик массы.
Благодаря обеспечению одного или более датчиков массы обеспечивается возможность достижения точного заполнения упаковки или контейнера. С этой целью датчик массы может быть обеспечен в направляющем блоке и/или внутри или на элементе для захвата, или в манипуляторе, и/или под упаковкой, или контейнером. При этом достигают предназначенную окончательную массу упаковки с, по возможности, более оптимальной точностью и исключают во время упаковки получение избыточной или недостаточной массы.
В дополнительном варианте осуществления согласно изобретению обеспечен упаковочный датчик, выполненный с возможностью определения позиции для укладки продукта.
Определение позиции для укладки включает контроль упаковки, особенно – укладку продуктов. С помощью датчика предпочтительно определяют: наличие упаковки, количество позиций для укладки продукта, доступность такой позиции и дополнительно предпочтительно возможную разницу по высоте и/или другие нерегулярные параметры. Благодаря этому увеличивается гибкость манипулирования упаковками различных типов и размеров. Кроме того, благодаря этому сокращается риск повреждения продукта как результат, например, разницы по высоте, и повреждения, например, смятия при ударе, возникающего в результате этого. Упаковки являются, например, бочонками, упаковочными лотками, большими плоскими тарелками и т.п. Таким упаковочным сенсорным датчиком является, например, стереокамера. После позиционирования продукта осуществляют контрольное измерение предпочтительно посредством того же и/или другого сенсорного датчика.
Изобретение дополнительно относится к сортировочной системе для сортировки и направленного упаковывания продуктов, таких как овощи и фрукты, содержащей:
– сортировочное устройство для сортировки продуктов; и
– упаковочное устройство, описанное выше и функционально связанное с одним или более сортировочных выпусков сортировочного устройства.
Посредством такой сортировочной системы обеспечиваются те же преимущества и эффекты, которые указаны в отношении упаковочного устройства. В контексте изобретения под сортировочной системой также понимают упаковочное устройство. При использовании такого устройства, особенно в сочетании с автоматизированной системой, может быть обеспечена обработка продуктов с высокой производительностью, при которой исключается повреждение продуктов.
Изобретение дополнительно также относится к способу направленного упаковывания продуктов, таких как овощи и фрукты, включающему в себя этапы, на которых:
– обеспечивают наличие вышеописанного упаковочного устройства;
– подают продукты;
– определяют наиболее пригодное место захвата, из набора пригодных мест захвата, с использованием сенсорной системы;
– направляют продукт направляющим блоком таким образом, чтобы наиболее пригодное место захвата было расположено в рабочем диапазоне манипулятора; и
– перемещают продукт, захваченный из направляющего блока, в упаковку или контейнер с использованием манипулятора, причем продукт укладывают с требуемой ориентацией манипулятором.
При использовании такого способа обеспечиваются те же преимущества и достигаются те же эффекты, которые указаны в отношении упаковочного устройства и/или сортировочной системы. При использовании такого способа может быть обеспечен особенно эффективный процесс упаковывания восприимчивых продуктов, в частности, когда продукты укладывают в упаковку или контейнер направленным образом. Благодаря сокращению времени, требующегося для упаковывания, можно снизить стоимость упаковывания. При использовании способа согласно изобретению риск повреждения продукта также исключается. При обработке продуктов, например, яблок с румяным местом и/или с плодоножкой, и/или чашечкой, продукты согласно предпочтительному в настоящее время способу ориентируют на основании требуемой ориентации румяного места и/или плодоножки, и/или чашечки в упаковке или контейнере. Требуемая ориентация продуктов может быть осуществлена посредством использования данного способа. Таким образом, можно, например, укладывать фрукты таким образом, чтобы их плодоножки были ориентированы в одном направлении или румяные места были ориентированы согласно определенному распределению, например, распределению в шахматном порядке. Должно быть понятно, что доступно выполнение различных возможных вариантов укладки посредством направленного процесса упаковки согласно изобретению. После направленной упаковки продуктов в упаковке эти продукты дополнительно транспортируют, например, для дополнительной транспортировки и хранения.
В возможных вариантах осуществления способа согласно изобретению используют один или большее количество этапов или решают задачи, описанные выше, с использованием сенсорной системы и/или элемента для захвата. При этом обеспечивают эффективное осуществление процесса упаковывания.
Множество преимуществ, особенностей и деталей изобретения пояснено на основе предпочтительных вариантов его осуществления со ссылками на чертежи.
На фиг. 1 показана упаковочная линия с упаковочным устройством согласно изобретению, вид сбоку;
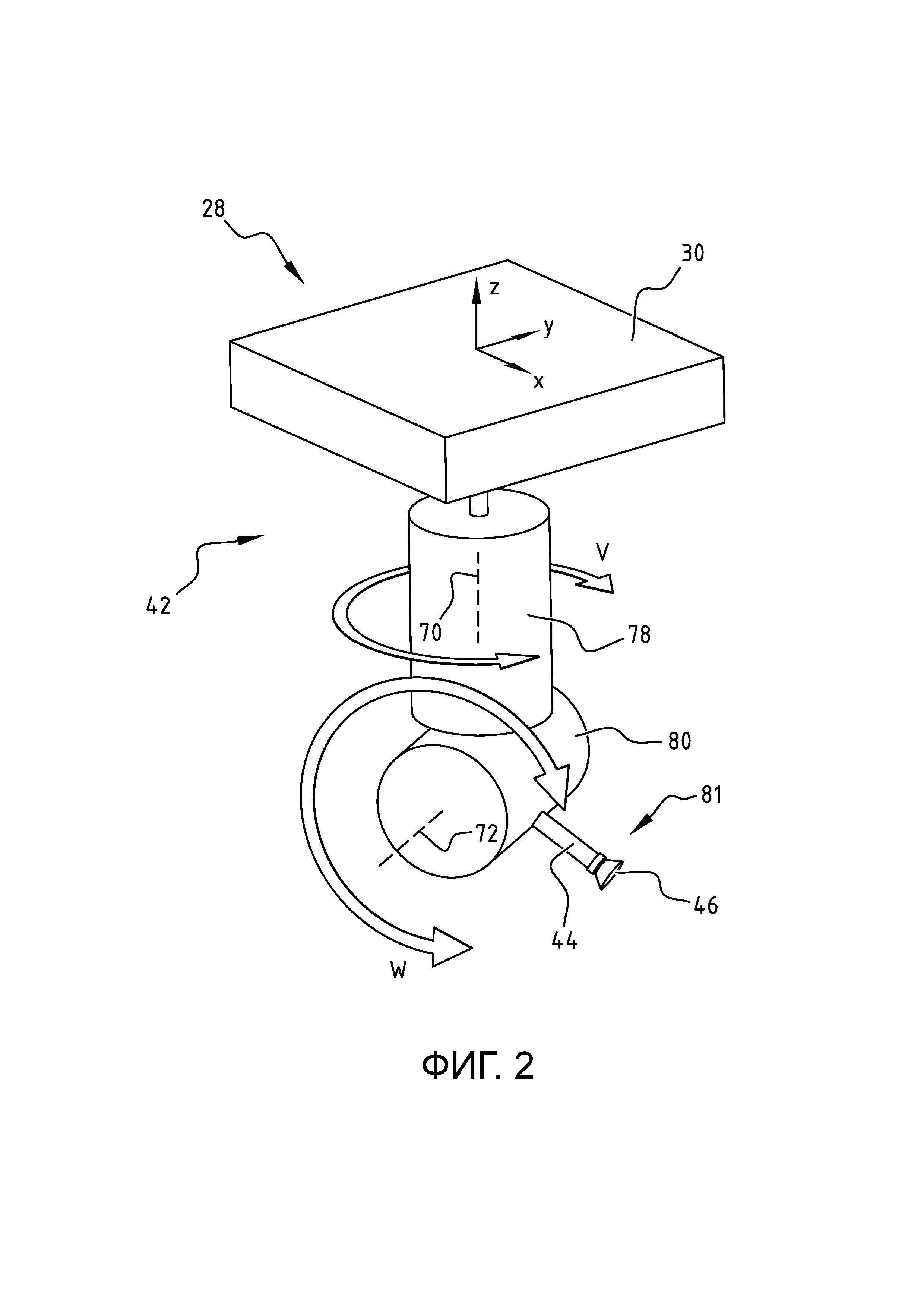
на фиг. 2 – головка манипулятора, представленная на фиг. 1, схематический вид;
на фиг. 3 – установка с тремя обрабатывающими линиями согласно изобретению;
на фиг. 4 – установка с дополнительными обрабатывающими линиями согласно изобретению; и
на фиг. 5A – 5B – головка со стабилизатором согласно изобретению.
На упаковочной линии 2 (см. фиг. 1) подают продукты P с конвейерной ленты 4. В показанном варианте продукты P содержат чашечку 6 и румяное место 8. На внешнем конце конвейерной ленты 4 продукты P перемещают с направляющей 10 на ленту 12, на которой отдельные (буферные) положения 14 устанавливают для перемещения продуктов в состояние захвата к направляющему блоку 16. Направляющий блок 16 состоит из двух осей 18, 20 с роликами 22, 24, вращаемыми вокруг них. Продукт P для направления размещают в направляющем положении 26.
В показанном варианте манипулятор 28 выполнен в виде перемещающего устройства 30, содержащего три плеча 32, которые можно перемещать с использованием одного или более двигателей 34 и центрального блока 36 управления. Плечи 32 обеспечены на внешнем конце валом 38 вращения, с которым соединены, в показанном варианте, два параллельных стержня 40. Параллельные стержни 40 другими внешними концами соединены с головкой 42. Головка 42 обеспечена элементом 44 для захвата, на котором расположены одна или более чашечных присосок 46. В показанном варианте головка 42 дополнительно обеспечена вакуумными средствами 48. Эти средства 48 могут также быть, если необходимо, выполнены в другом месте в соответствии с требованиями. Чашечную присоску 46 используют для захвата продуктов P в направляющем положении 26. Манипулятор 28 выполнен таким образом, чтобы продукт P можно было захватывать в рабочем диапазоне 50 направляющего положения 26. В показанном варианте верхняя полусфера продукта P в направляющем положении 26 находится, по существу, в рабочем диапазоне 50. В показанном варианте чашечная присоска 46 дополнительно обеспечена сенсорным датчиком 52 для определения, например, давления в чашечной присоске 46.
В показанном варианте продукт P оценивается в направляющем положении 26 с использованием камеры 54, при этом используют, среди других факторов, поворот роликов 22, 24 направляющего блока 16 для обеспечения возможности обозревания таким образом всего продукта. Для этого имеется камера 54 в рабочем диапазоне 56, в котором может производиться отбор образцов. В показанном варианте отбор образцов может производиться в положении 26. Должно быть понятно, что рабочий диапазон 56 камеры 54 может быть также расширен, например, до ленты 12 и/или ленты 4, чтобы уже получать информацию о продуктах P на более ранней стадии. Камера 54 посылает сигнал 58 в контроллер 60. Контроллер 60 определяет управляющие сигналы 62, требующиеся для направляющего блока контроллера 64, который затем посылает управляющие сигналы 66 в направляющий блок 16. Контроллер 60 дополнительно посылает сигналы 68 в центральный блок 36 управления перемещающего устройства 30, после чего управляют одним или более двигателями 34. Должно быть понятно, что можно также использовать и другие конфигурации системы управления, например, с использованием одного центрального контроллера или, наоборот, с использованием даже большего количества локальных контроллеров.
Манипулятор 28 перемещают с использованием перемещающего устройства 30 в трехмерном пространстве X-Y-Z. Головка 42 выполнена с возможностью вращения вокруг оси 70 вращения и оси 72 вращения для вращения элемента 44 для захвата. Продукт P захватывают в положении A манипулятором 28 и переносят через положение B передачи в положение C позиционирования, где продукты P укладывают в упаковку 74 с помощью головки 42. Продукт P при этом укладывают в требуемое положение в упаковке 74 с правильной ориентацией, например, с требуемой ориентацией румяного места 8 и/или чашечки 6. Упаковку 74 подают с помощью конвейерной ленты 76. В показанном варианте положение конвейерной ленты 76 по высоте можно регулировать.
Головку 42 манипулятора можно перемещать в трехмерном пространстве X-Y-Z с помощью схематично показанного перемещающего устройства 30 (см. фиг. 2). Первое поворотное устройство 78 можно перемещать в направлении V поворота вокруг оси 70 вращения. Второе поворотное устройство 80, с которым связан элемент 44 для захвата с чашечной присоской 46, можно перемещать вокруг оси 72 вращения. Манипулятор 42 показан схематично на фиг. 2, на которой указаны перемещения в направлениях V, W, X, Y, Z. Такой манипулятор 28, таким образом, обладает пятью степенями свободы и может зажимать или захватывать продукты P в требуемом положении, для их ориентирования и укладки с требуемой ориентацией в упаковку 74. С помощью физического стабилизатора 81 обеспечивают дополнительную стабилизацию продукта P, захваченного чашечной присоской 46, и способствуют удержанию продукта чашечной присоской 46 во время перемещения продукта P. Головка 42 манипулятора может быть по выбору обеспечена большим, чем одна, количеством чашечных присосок 46. В показанном варианте чашечная присоска 46 является модульной, что означает, что она может быть быстро заменена, например, для обработки продукта другого типа и/или в случае ее повреждения. Манипулятор 28 можно по выбору использовать для позиционирования упаковки 74 и/или так называемого упаковочного лотка. Если требуется, манипулятор 28 можно также использовать для размещения маркировки или для заворачивания в фольгу, бумагу, обертку и т.п.
Продукт P, подлежащий упаковыванию в упаковку 74, подают с помощью конвейерной ленты 4 и переносят на ленту 12 с отдельными (буферными) позициями 14. Как только направляющий блок 16 оказывается готовым к приему продукта P, ленту 12 перемещают для подачи продукта P на направляющий блок 16. Должно быть понятно, что можно также использовать и другие системы для подачи продукта P на направляющий блок 16. При этом может быть выполнена ненаправленная подача в лотки с помощью так называемой упаковочная машины для лотков, причем продукт P укладывают на направляющий блок 16 с помощью манипулятора 28, а затем захватывают снова после измерения/направления и укладывают в упаковку направленным способом. В качестве дополнительной альтернативы, лента 12 и/или лента 4 может быть введена, по меньшей мере частично, в рабочий диапазон 56 таким образом, чтобы с помощью камеры 54 можно было отбирать образцы продуктов P уже на ленте 12 и/или на ленте 4. Чтобы с помощью манипулятора 28 можно было достигать пригодное место захвата продукта P, продукт P может быть непосредственно захвачен, а направляющий блок 16 может быть некоторым образом пропущен при подаче этого продукта P.
Продукт P вращают на направляющем блоке 16 таким образом, чтобы могла быть предпочтительно произведена оценка качества продукта P с помощью камеры 54 и/или других датчиков, при этом ориентация характерных признаков продукта, например, чашечки 6 и/или румяного места 8, и/или плодоножки, могла также быть определена. Затем определяют набор пригодных мест захвата на поверхности продукта P посредством контроллера 60 на основе сигналов 58, поступающих от камеры 54. Используя направляющий блок 16 по меньшей мере одно из этих мест захвата, из набора пригодных мест захвата, вводят в диапазон 50 захвата; это соответствует рабочему диапазону 50 манипулятора 28 в показанном варианте. В показанном варианте этот диапазон 50 захвата соответствует верхней полусфере продукта P. Должно быть понятно, что аналогичным образом возможны согласно изобретению и другие конфигурации диапазонов при использовании другого манипулятора. Манипулятором 28 захватывают продукт P из направляющего положения 26, используя чашечную присоску 46. Должно быть понятно, что и другие системы захвата, например, зажимы, можно также использовать при этом вместо чашечной присоски 46. Манипулятор 28 затем перемещается к упаковке 74, которую подают с помощью конвейерной ленты 76. Продукт P при этом ориентируют в требуемом положении и в таком положении укладывают в упаковку 74. После заполнения упаковки 74 продуктами P, уложенными с требуемой ориентацией с использованием манипулятора 28, заполненную упаковку 74 предпочтительно выгружают для дополнительной обработки, и укладывают новую упаковку 74. Подачу и выгрузку упаковок 74 можно осуществлять в горизонтальной, вертикальной или комбинированной плоскости. Упаковка 74 при этом может быть, если это требуется, уложена под углом к горизонтальной плоскости. Упаковку 74 можно, если требуется, совместно перемещать во время заполнения для дополнительного ускорения упаковочного процесса. Упаковку 74 можно также укладывать на поворотный стол для дополнительного увеличения возможностей перемещения. Упаковками 74 являются, например: коробки, упаковочные лотки, бочонки; и их можно заполнять в один слой или множество слоев.
Направляющий блок 16 по выбору обеспечен механизмом вращения вокруг по существу вертикальной оси. Вращение можно, таким образом, осуществлять в случае, если пригодное место захвата продукта P расположено, например, сбоку направляющего блока 16. Этим исключают блокирование манипулятором 28 рабочего диапазона 56 камеры 54 и/или других датчиков.
Направляющий блок 16 дополнительно по выбору обеспечен множеством роликов или дисков 22, 24, расположенных один за другим. Направляющий блок 16 при этом также выполняет транспортировочную функцию ленты 12. Посредством продвижения продуктов P через или с помощью комбинированного направляющего блока 16, а также посредством отбора их образцов, в определенный момент пригодное место захвата оказывается расположенным таким образом, чтобы его можно было захватить манипулятором 28 для направленного размещения в упаковке 74. Диски или ролики 22, 24 при этом приводят в движение. Вместо такой комбинированной подачи и направления с помощью роликов или дисков 22, 24, также можно, в качестве дополнительной альтернативы, использовать желобчатые катки для осуществления такого сочетания. При этом возможно эффективное выполнение процесса упаковывания.
В показанном варианте осуществления (см. фиг. 3) полная упаковочная система и/или сортировочная система 82 содержит три упаковочных линии 84, 86, 88. В показанном варианте выполнения упаковочных линий 84, 86, 88 представлен ряд возможных вариантов. Должно быть понятно, что на практике можно использовать другой ряд вариантов и/или большее количество упаковочных линий одинакового типа варианта осуществления. Упаковочные линии 84, 86, 88 содержат элементы, подобные элементам рассмотренной выше упаковочной линии 2, показанной на фиг. 1. Каждая упаковочная линия 84, 86, 88 снабжена манипулятором 28, имеющим рабочий диапазон 90. Продукты располагают в одном или более рабочих диапазонах 56 и перемещают в упаковку 74. В возможном варианте осуществления направляющий блок 16 снабжен дополнительной направляющей 91 (см. фиг. 1), с помощью которой направляющий блок 16 может быть перемещен в положение за пределы рабочего диапазона 56 камеры 54. Этим обеспечивается возможность захвата элементом 44 для захвата, осуществляемого манипулятором 28, за пределами рабочего диапазона 56 камеры 54, без использования двух элементов, препятствующих работе друг друга.
В показанном варианте упаковочная линия 84 обеспечена двойным направляющим блоком 16. Упаковочная линия 86 дополнительно обеспечена второй питающей системой. Использование двух потоков обеспечивает возможность увеличения общей производительности и/или возможность выбора между различными продуктами P, являющимися следующими продуктами P, подлежащими укладке в упаковку 74 с использованием манипулятора 28. Должно быть понятно, что обе линии, обеспеченные сдвоенной линией подачи и обеспеченные сдвоенным направляющим блоком 16, могут также быть объединены в одну единую упаковочную линию 2. В показанном варианте упаковочная линия 88 обеспечена устройством 92 для нанесения маркировки, например, в виде лазера, с помощью которого можно наносить маркировочные знаки на продукт. Устройством 92 для нанесения маркировки можно по выбору управлять посредством манипулятора 28, или продукт P можно переносить через рабочий диапазон маркера 92 с помощью манипулятора. Если требуется, то устройство 92 для нанесения маркировки может дополнительно или альтернативно быть выполнено в виде станции для нанесения воска для обеспечения продуктов P слоем воска, для увеличения срока хранения продукта и/или также для обеспечения возможности лучшего визуального представления продукта P. Датчик 94 дополнительно обеспечен для определения упаковки 74 или ее части, и/или для проверки положения продуктов P. Корректирование положения продуктов P можно по выбору осуществлять с помощью манипулятора 28. Датчик 94 можно аналогичным образом использовать для проверки положения упаковки 74 и/или проверки заполнения упаковки 74. Можно также использовать датчик 94 для дополнительной проверки, для просмотра того, действительно ли доступна предназначенная позиция для укладки. Возможно также обеспечение всех упаковочных линий 2 одним или большим количеством этих средств или еще дополнительных средств.
В других конфигурациях (см. фиг. 4) можно использовать, например, упаковочную линию 96 с подводом 98, дозирующим блоком 100, измерительной и направляющей частью 102, частью 104 для захвата с манипулятором/роботом 106 и выгружающей лентой, лентой для упаковок или лентой 108 для бочонков с упаковкой или поддоном 110. В альтернативной упаковочной линии 112 можно использовать одинаковые или сходные компоненты, но она обеспечена вторым манипулятором/роботом 106, расположенным последовательно. Благодаря размещению двух (или большего количества) манипуляторов/роботов 106 последовательно в линии подвода 98 обеспечивается возможность увеличения скорости обработки. В дополнительном альтернативном варианте осуществления упаковочной линии 114 сдвоенный подвод 98 обеспечен одной лентой 108 для выгрузки. Должно быть понятно, что аналогичным образом возможно создание дополнительных альтернативных вариантов. Возможно также использование других компонентов. Датчик 116 может быть, например, выполнен для определения положений укладки и/или позиционирования продуктов, например, в виде стереокамеры. Дополнительный датчик 94 может быть по выбору также обеспечен для дополнительной проверки.
Стабилизатор 81a (см. фиг. 5B) с рядом пальцеобразных элементов и стабилизатор 81b (см. фиг. 5A) кольцевой формы являются альтернативными вариантами осуществления стабилизатора 81, расположенного внутри или на элементе 44 для захвата головки 42 манипулятора 28 или манипулятора/робота 106. В показанных вариантах элемент 44 для захвата обеспечен чашечной присоской 46. При захвате продукта чашечная присоска 46 отходит несколько назад таким образом, что продукт испытывает поддержку со стороны стабилизатора 81, 81a, 81b.
Изобретение никоим образом не ограничено описанными выше предпочтительными вариантами его осуществления. Искомые права определены в пунктах формулы изобретения, в объеме которых могут быть обеспечены дополнительные модификации. Таким образом, можно, например, установить упаковочную линию, по существу, вдоль прямой линии. Должно быть понятно, что возможны также и другие конфигурации, например, установка U-образной формы. Манипулятор 28 может быть также обеспечен под углом для изменения рабочего диапазона манипулятора 28 и/или исключения перекрывания рабочим диапазоном 56 датчиков 54. Если требуется, то может быть обеспечено множество манипуляторов 28, которые принимают друг у друга продукты P для укладки продукта P в упаковку 74 направленным способом.
Реферат
Изобретение относится к упаковочному устройству и сортировочной системе (82) для направленного упаковывания продуктов (P), таких как овощи и фрукты, и к способу упаковывания. Упаковочное устройство согласно изобретению содержит сенсорную систему (54), выполненную с возможностью определения набора пригодных мест захвата, по меньшей мере один направляющий блок (16), выполненный с возможностью направления продукта и обеспеченный по меньшей мере одной степенью свободы для вращения продукта вокруг, по существу, горизонтальной оси вращения, и манипулятор (28), содержащий элемент (44) для захвата и перемещающее устройство (30), обладающее по меньшей мере четырьмя степенями свободы для переноса продукта и вращения вокруг, по существу, горизонтальной оси, причем вращение продукта вокруг, по существу, вертикальной оси вращения возможно посредством обеспечения перемещающего устройства и/или направляющего блока дополнительной степенью свободы. 3 н. и 16 з.п. ф-лы, 6 ил.
Комментарии