Устройство организации изделий, система организации изделий и компьютерно-читаемый носитель хранения - RU2739726C1
Код документа: RU2739726C1
Чертежи


Описание
Область техники, к которой относится изобретение
Варианты осуществления, описанные в данном документе, относятся, в целом, к устройству организации изделий, системе организации изделий и компьютерно-читаемому носителю хранения.
Уровень техники
Система сортировки с сортировщиком является обычным средством для автоматической сортировки изделий, таких как упаковки. Существует множество типов сортировщиков, и сортировщик для использования выбирается согласно области для установки, скорости обработки и видам изделий. Виды изделий могут ссылаться на различия в размере, весе, форме и т.д.
Все же, сортировщик, который может иметь дело с каждым видом изделий, еще не доступен, и изделия вне функциональной возможности сортировщика обрабатываются посредством ручной сортировки оператором. Ручная сортировка представляет значительное бремя для логистических предприятий. Такое бремя может быть смягчено, например, посредством установки двух или более типов сортировщиков, которые, однако, повлекут за собой увеличение размера всей системы и не будут сулить экономическую эффективность, таким образом, это не является лучшим подходом. Также, увеличившийся труд операторов, чтобы отбирать и направлять изделия к соответствующим сортировщикам, и задержка обработки являются дополнительными проблемами, требующими решения.
Существует в логистических предприятиях постоянная потребность улучшать эффективность в сортировке изделий, и постоянно ищется технология для реализации эффективной обработки большего множества изделий.
Краткое описание чертежей
Общая архитектура для реализации различных отличительных признаков вариантов осуществления будет описана со ссылкой на чертежи. Чертежи и ассоциированные описания предоставляются, чтобы иллюстрировать варианты осуществления, а не ограничивать рамки изобретения.
Фиг. 1 - это схема, показывающая одну примерную общую конфигурацию системы организации изделий согласно некоторому варианту осуществления.
Фиг. 2 - это блок-схема, показывающая одну примерную общую конфигурацию устройства организации изделий согласно некоторому варианту осуществления.
Фиг. 3 - это схема, показывающая одну примерную таблицу организации изделий, хранящуюся во вспомогательном запоминающем устройстве для устройства организации изделий согласно некоторому варианту осуществления.
Фиг. 4 - это блок-схема, показывающая одну примерную общую конфигурацию автоматически управляемого транспортного средства (AGV) согласно некоторому варианту осуществления.
Фиг. 5 - это блок-схема последовательности операций, показывающая одну примерную обработку изделия, выполняемую посредством системы организации изделий согласно некоторому варианту осуществления.
Фиг. 6 - это блок-схема последовательности операций, показывающая одну примерную обработку для определения участка перенаправления изделия, выполняемую посредством системы организации изделий согласно некоторому варианту осуществления.
Фиг. 7 - это блок-схема последовательности операций, показывающая одну примерную обработку для определения пункта назначения сортировки, выполняемую посредством системы организации изделий согласно некоторому варианту осуществления.
Подробное описание изобретения
В целом, согласно одному варианту осуществления, устройство организации изделий включает в себя приемник, процессор и передатчик. Приемник конфигурируется, чтобы принимать информацию измерения изделия, полученную из измерения изделия. Процессор конфигурируется, чтобы выбирать первый управляющий сигнал отклонения или второй управляющий сигнал отклонения на основе информации измерения изделия, первый управляющий сигнал отклонения предназначен для перенаправления изделия к сортировщику, сконфигурированному, чтобы сортировать изделие согласно информации о пункте назначения сортировки, соответствующей изделию, второй управляющий сигнал отклонения предназначен для перенаправления изделия к транспортеру, сконфигурированному, чтобы перевозить изделие согласно управляющему сигналу для транспортера. Передатчик конфигурируется, чтобы передавать первый или второй управляющий сигнал отклонения отклоняющему устройству, сконфигурированному, чтобы перенаправлять изделие к сортировщику или транспортеру. Согласно некоторому варианту осуществления, устройство организации изделий включает в себя приемник, процессор и передатчик.
Приемник приспособлен принимать информацию измерения изделия, полученную из измерения изделия.
Процессор приспособлен выбирать первый управляющий сигнал отклонения или второй управляющий сигнал отклонения на основе информации измерения изделия. Первый управляющий сигнал отклонения предназначен для перенаправления изделия к сортировщику, приспособленному сортировать изделие согласно информации о пункте назначения сортировки, соответствующей изделию. Второй управляющий сигнал отклонения предназначен для перенаправления изделия к транспортеру, приспособленному, чтобы перевозить изделие согласно управляющему сигналу для транспортера. Передатчик приспособлен передавать первый или второй управляющий сигнал отклонения отклоняющему устройству, приспособленному, чтобы перенаправлять изделие к сортировщику или транспортеру.
Теперь варианты осуществления будут описаны со ссылкой на чертежи.
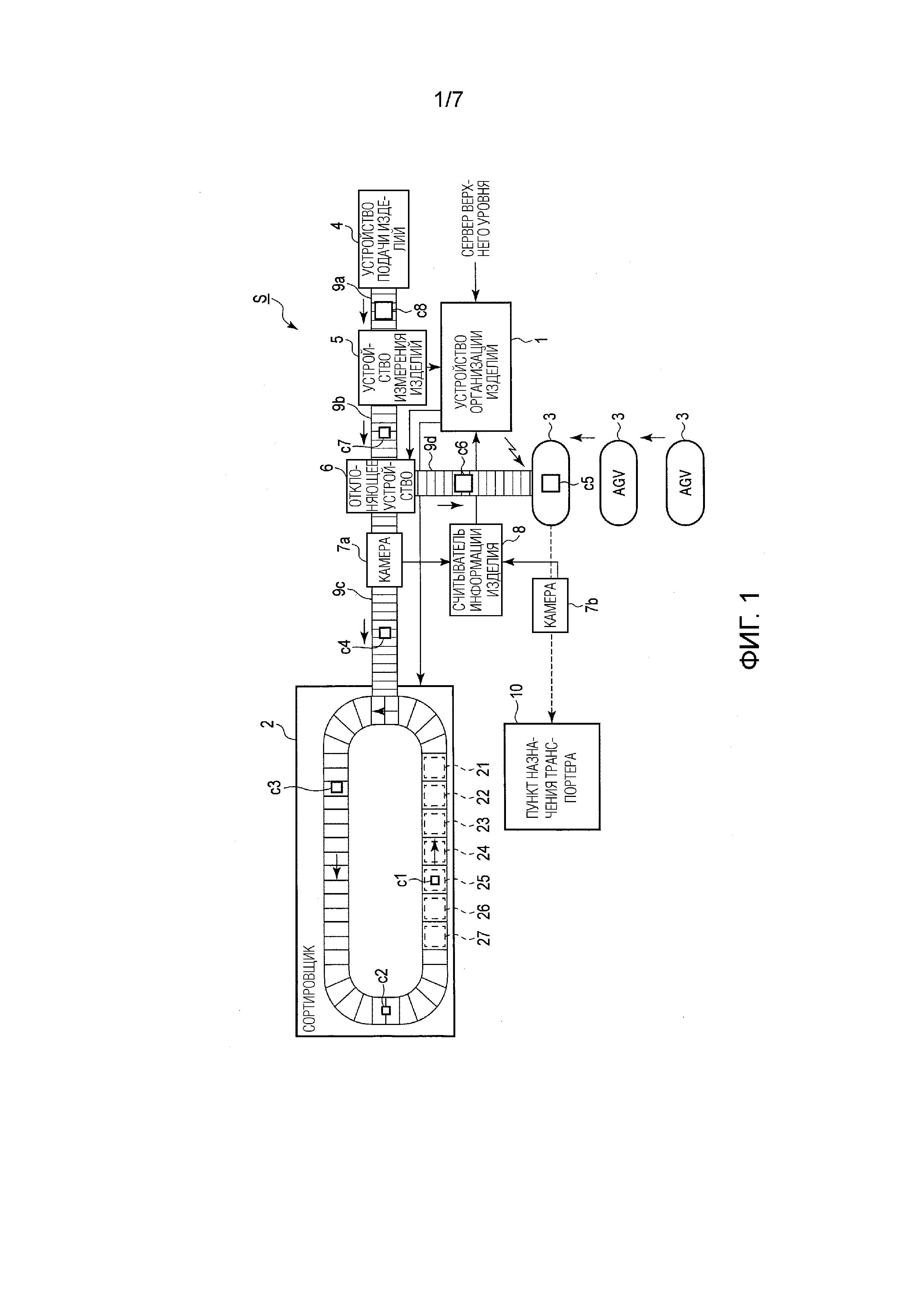
Фиг. 1 - это схема, показывающая одну примерную общую конфигурацию системы организации изделий согласно некоторому варианту осуществления.
Система организации изделий обозначается символом S, и, как показано на фиг. 1, система S организации изделий включает в себя устройство 1 организации изделий, сортировщик 2, одно или более автоматически управляемых транспортных средств (AGV) 3 и т.д. Система S организации изделий снабжается устройством 4 подачи изделий, устройством 5 измерения изделий, отклоняющим устройством 6, камерами 7a и 7b, считывателем 8 информации изделия, транспортными лентами 9a, 9b, 9c и 9d и т.д.
Система S организации изделий дополнительно включает в себя множество датчиков изделий для обнаружения изделий c (например, изделий c1-c8), транспортируемых посредством сортировщика 2, транспортных лент 9a, 9b, 9c и 9d, и т.д. Система S организации изделий с этой конфигурацией наблюдает сигналы обнаружения от датчиков изделий, чтобы отслеживать транспортировку (перемещение) каждого изделия c, и, таким образом, может обнаруживать или рассчитывать, где каждое изделие c находится. Например, система S организации изделий приспособлена для обнаружения или расчета изделия c, размещенного на AGV 3, также. Система S организации изделий также назначает идентификационную информацию обнаружения изделия (далее в данном документе "ID обнаружения изделия" или "множество ID обнаружения изделия") соответствующим изделиям c (подаваемым друг за другом из устройства 4 подачи изделий) в качестве субъектов обнаружения посредством датчиков изделий.
Изделия c, обрабатываемые посредством системы S организации изделий, являются упаковками, и т.д., различных размеров, форм и весов. Каждому из изделий c предварительно назначается идентификационная информация изделия (далее в данном документе "ID изделия" или "множество ID изделий). Например, каждое изделие c может быть непосредственно промаркировано с помощью ID изделия, или этикетка или т.п., отмеченная с помощью ID изделия, может быть присоединена к каждому изделию c. Маркировка множеством ID изделий может быть реализована способом печати видимых меток или способом печати невидимых меток с помощью поглощающих инфракрасный свет чернил, и т.д. К каждому изделию c может вместо этого или необязательно быть прикреплена электронная этикетка, беспроводная метка или т.п., которая хранит ID изделия.
ID изделия является блоком информации, состоящим из цифр, букв, символов, штрих-кода, двухмерного кода, QR-кода (зарегистрированная торговая марка) или сочетания двух или более из них, и, по меньшей мере, содержит уникальную информацию. ID изделия может содержать обсуждаемую позже информацию о пункте назначения сортировки, или таблица TA организации изделий, хранящаяся посредством устройства 1 организации изделий, может содержать информацию о пункте назначения сортировки, ассоциированную с ID изделия. Описание этого варианта осуществления будет предполагать последнее.
Устройство 1 организации изделий может быть реализовано, например, посредством единственного компьютера или сочетания множества компьютеров, и оно связывается с другими устройствами с помощью кабелей или беспроводным образом, так что информация от других устройств принимается и сохраняется, и управление над другими устройствами реализуется посредством передачи управляющих сигналов, и т.д., им. Примеры таких других устройств включают в себя сортировщик 2, множество AGV 3 и отклоняющее устройство 6. Операции и т.д. устройства 1 организации изделий будут описаны более подробно позже, со ссылкой на фиг. 2.
Сортировщик 2 является сортирующим устройством, приспособленным, чтобы сортировать изделия c в соответствующие пункты назначения сортировки на основе их соответствующей информации о сортировке. Более конкретно, сортировщик 2 сортирует изделие c, согласно одному примеру, в целевой или предназначенный сортировочный лоток среди сортировочных лотков 21-27 на основе информации о пункте назначения сортировки, ассоциированной с ID изделия. Сортировщик 2 принимает изделие c, которое было транспортировано посредством транспортной ленты 9c, и сортирует его в предназначенный лоток из сортировочных лотков 21-27 на основе информации о пункте назначения сортировки от устройства 1 организации изделий. Операции и т.д. сортировщика 2 будут описаны более подробно позже.
Каждое AGV 3 может быть автоматизированным транспортным средством, приспособленным для перевозки изделий c. AGV 3 принимает изделие c, которое было транспортировано посредством транспортной ленты 9d, и доставляет его в пункт 10 назначения транспортера согласно управляющему сигналу для транспортера от устройства 1 организации изделий. Например, AGV 3 транспортирует принятое изделие c в пункт 10 назначения транспортера на основе управляющего сигнала для транспортера, содержащего информацию о местоположении, соответствующую пункту 10 назначения транспортера. AGV 3 может вместо этого или дополнительно быть приспособленным для перевозки принятого изделия c в местоположение, соответствующее предназначенному лотку из сортировочных лотков 21-27 на основе управляющего сигнала для транспортера, содержащего информацию о местоположении, соответствующую этому предназначенному лотку.
Устройство 4 подачи изделий принимает изделия c от оператора или изделия c, перенесенные транспортной лентой, и т.д., и транспортная лента 9a транспортирует изделия c, принятые в устройстве 4 подачи изделий, к устройству 5 измерения изделий.
Устройство 5 измерения изделий измеряет, по меньшей мере, одно из размера, формы и веса транспортируемого изделия c и выводит информацию измерения изделия, полученную из измерения, в устройство 1 организации изделий. Например, устройство 5 измерения изделий может использовать множество датчиков, чтобы получать результаты многонаправленного обнаружения для изделия c, так что размер (измерения в направлениях X-оси, Y-оси и Z-оси) и форма изделия c измеряются на основе сочетания этих результатов обнаружения, и может использовать весы, чтобы измерять вес изделия c. Примеры, которые могут быть применены в качестве таких датчиков, включают в себя лазерный датчик расстояния, приспособленный для измерения расстояния от источника света до изделия c. Устройство 5 измерения изделий может также применять камеру или т.п. при необходимости, чтобы захватывать изображения изделия c со множества направлений, и подвергает полученные изображения аналитической обработке, так что размер и форма изделия c измеряются. Транспортная лента 9b транспортирует изделие c после измерения в устройстве 5 измерения изделий к отклоняющему устройству 6.
Отклоняющее устройство 6 перенаправляет изделия c к сортировщику 2 или множеству AGV 3 на основе управляющего сигнала S11 отклонения (первого управляющего сигнала отклонения) или управляющего сигнала S12 отклонения (второго управляющего сигнала отклонения), передаваемым от устройства 1 организации изделий. Например, отклоняющее устройство 6 помещает изделие c, которое было транспортировано посредством транспортной ленты 9b, на транспортную ленту 9c на основе управляющего сигнала S11 отклонения, переданного от устройства 1 организации изделий, и транспортная лента 9c транспортирует изделие c к сортировщику 2, так что изделие c отправляется к сортировщику 2. Также, отклоняющее устройство 6 помещает изделие c, которое было транспортировано посредством транспортной ленты 9b, на транспортную ленту 9d на основе управляющего сигнала S12 отклонения, переданного от устройства 1 организации изделий, и транспортная лента 9d транспортирует изделие c к множеству AGV 3, так что изделие c устанавливается в позицию погрузки для применимого AGV 3. Отметим, что отклоняющее устройство 6 может включать в себя конфигурацию роботизированной руки и т.д., чтобы подбирать изделия c и перенаправлять их к сортировщику 2 или множеству AGV 3.
Камера 7a размещается в позиции, где она обращена к транспортной ленте 9c, и формирует изображения изделий c, транспортируемых посредством транспортной ленты 9c. Например, множество камер 7a могут быть размещены так, что изделие c, транспортируемое посредством транспортной ленты 9c, изображается под различными углами. Камера 7a выводит данные изображения, полученные из формирования изображения, в считыватель 8 информации изделия. Отметим, что одна или более камер 7a могут быть размещены в любых позициях, включающих в себя, например, позицию, обращенную к транспортной ленте 9a или 9b.
AGV 3 загружает изделие c, которое было транспортировано посредством транспортной ленты 9d, и перевозит его в пункт 10 назначения транспортера или в местоположение, соответствующее предназначенному лотку из сортировочных лотков 21-27, на основе управляющего сигнала для транспортера, переданного от устройства 1 организации изделий.
Камера 7b размещается в позиции, где она обращена к пути перевозки множества AGV 3, и формирует изображения изделий c, перевозимых посредством множества AGV 3. Например, множество камер 7b могут быть размещены так, что изделие c, перевозимое посредством AGV 3, изображается под различными углами. Камера 7b выводит данные изображения, полученные из формирования изображения, в считыватель 8 информации изделия. Отметим, что одна или более камер 7b могут быть размещены в любых позициях, включающих в себя, например, позицию, обращенную к транспортной ленте 9d.
Считыватель 8 информации изделия принимает данные изображения, выведенные из камер 7a и 7b, считывает ID изделия, содержащийся в данных изображения, и передает ID изделия устройству 1 организации изделий. Если ID изделия состоит из QR-кода, считыватель 8 информации изделия функционирует как считыватель QR-кода. Если ID изделия существует в форме информации, сохраненной в беспроводной метке, считыватель 8 информации изделия функционирует как считыватель беспроводной метки, приспособленный, чтобы считывать ID изделия из беспроводной метки беспроводным образом.
Фиг. 2 - это блок-схема, показывающая одну примерную общую конфигурацию устройства 1 организации изделий согласно некоторому варианту осуществления. Как показано на фиг. 2, устройство 1 организации изделий включает в себя процессор 11, постоянное запоминающее устройство (ROM) 12, оперативное запоминающее устройство (RAM) 13, вспомогательное запоминающее устройство 14, интерфейс 15 связи и блок 16 ввода/вывода.
Процессор 11 служит в качестве центральной части компьютера и выполняет вычислительную обработку и управляющую обработку, требуемую для обработки изделий c. Обработка изделий c включает в себя операции транспортировки, перевозки, перенаправления и сортировки и т.д. для изделий c. Для того, чтобы реализовывать различные функции устройства 1 организации изделий, процессор 11 выполняет управление на основе одной или более программ системного программного обеспечения, прикладного программного обеспечения или микропрограммного обеспечения, хранящегося в ROM 12 или во вспомогательном запоминающем устройстве 14. Процессор 11 может быть, например, центральным процессором (CPU), микропроцессором (MPU) или цифровым сигнальным процессором (DSP). Процессор 11 может также быть сочетанием двух или более из CPU, MPU и DSP. Процессор 11 назначает, на основе сигналов обнаружения от множества датчиков изделий, ID обнаружения изделия каждому изделию c в качестве субъекта обнаружения и обнаруживает или рассчитывает, где каждое изделие c находится, отслеживая его транспортировку (перемещение).
ROM 12 служит в качестве главного запоминающего устройства компьютера, который применяет процессор 11 в качестве центральной части. ROM 12 может быть энергонезависимой памятью, используемой исключительно для считывания данных. ROM 12 может быть энергонезависимым компьютерно-читаемым носителем хранения, хранящим вышеупомянутые одну или более программ. Также, ROM 12 хранит данные для использования процессором 11, чтобы выполнять различную обработку, также, как и множество настроечных значений, и т.д.
RAM 13 служит в качестве главного запоминающего устройства компьютера, который применяет процессор 11 в качестве центральной части. RAM 13 является памятью для считывания данных и записи данных. RAM 13 может быть использовано в качестве так называемой рабочей области или т.п. для хранения данных, используемых на временной основе процессором 11, чтобы выполнять различную обработку.
Вспомогательное запоминающее устройство 14 служит в качестве вспомогательного запоминающего устройства компьютера, который применяет процессор 11 в качестве центральной части. Вспомогательное запоминающее устройство 14 может, например, быть электрическим стираемым программируемым постоянным запоминающим устройством (EEPROM) (зарегистрированная торговая марка), накопителем на жестком диске (HDD), твердотельным накопителем (SSD), или т.п. Вспомогательное запоминающее устройство 14 может также функционировать в качестве энергонезависимого компьютерно-читаемого носителя хранения, хранящего вышеупомянутую одну или более программ. Вспомогательное запоминающее устройство 14 хранит данные для использования процессором 11, чтобы выполнять различную обработку, данные, сформированные из обработки посредством процессора 11, множество настроечных значений, и т.п. Отметим, что устройство 1 организации изделий может включать в себя интерфейс, приспособленный для приема вставки носителя хранения, такого как карта памяти, универсальную последовательную шину (USB) и т.д. вместо или в дополнение к вспомогательному запоминающему устройству 14.
Программа или программы, хранящиеся в ROM 12 или вспомогательном запоминающем устройстве 14, включают в себя программу для обработки изделий c. В примерном случае устройство 1 организации изделий предоставляется его администратору или т.п. в состоянии, когда такая программа уже была сохранена в ROM 12 или вспомогательном запоминающем устройстве 14. В других случаях устройство 1 организации изделий может быть предоставлено администратору, и т.д., в состоянии, когда программа не хранится в ROM 12 или вспомогательном запоминающем устройстве 14. Программа для обработки изделий c может быть отдельно предоставлена администратору, и т.д., и впоследствии записана на вспомогательное запоминающее устройство 14 администратором или специалистом по техническому обслуживанию, и т.д. Предоставление программы здесь может быть реализовано, например, посредством передачи съемного, энергонезависимого компьютерно-читаемого носителя хранения, такого как магнитный диск, оптический диск или полупроводниковая память, хранящая программу, или посредством загрузки программы по сети.
Интерфейс 15 связи является интерфейсом, приспособленным для связи с другими устройствами по сети, и т.д., с помощью кабелей или беспроводным образом. Интерфейс 15 связи принимает различную информацию от других устройств и передает различную информацию другим устройствам. Например, интерфейс 15 связи функционирует как приемник, чтобы принимать, от сервера верхнего уровня для системы S организации изделий, ID изделия для соответствующего изделия c и информацию о пункте назначения сортировки, ассоциированную с этим ID изделия, прежде чем система S организации изделий начинает операции обработки изделия. Также, интерфейс 15 связи принимает сигналы обнаружения от датчиков изделий, информацию измерения изделия от устройства 5 измерения изделий и ID изделий от считывателя 8 информации изделий. Интерфейс 15 связи дополнительно функционирует как передатчик, чтобы передавать информацию о пункте назначения сортировки сортировщику 2, управляющие сигналы для транспортера к AGV 3 и управляющие сигналы S11 и S12 отклонения к отклоняющему устройству 6.
Блок 16 ввода/вывода включает в себя клавиатуру, цифровые кнопочные панели, мышь, дисплей с сенсорной панелью, и т.п. Входные данные инструкции оператора принимаются посредством клавиатуры, цифровых кнопочных панелей, мыши, дисплея с сенсорной панелью, и т.д., и отправляются процессору 11. Дисплей с сенсорной панелью приспособлен для представления различной информации оператору.
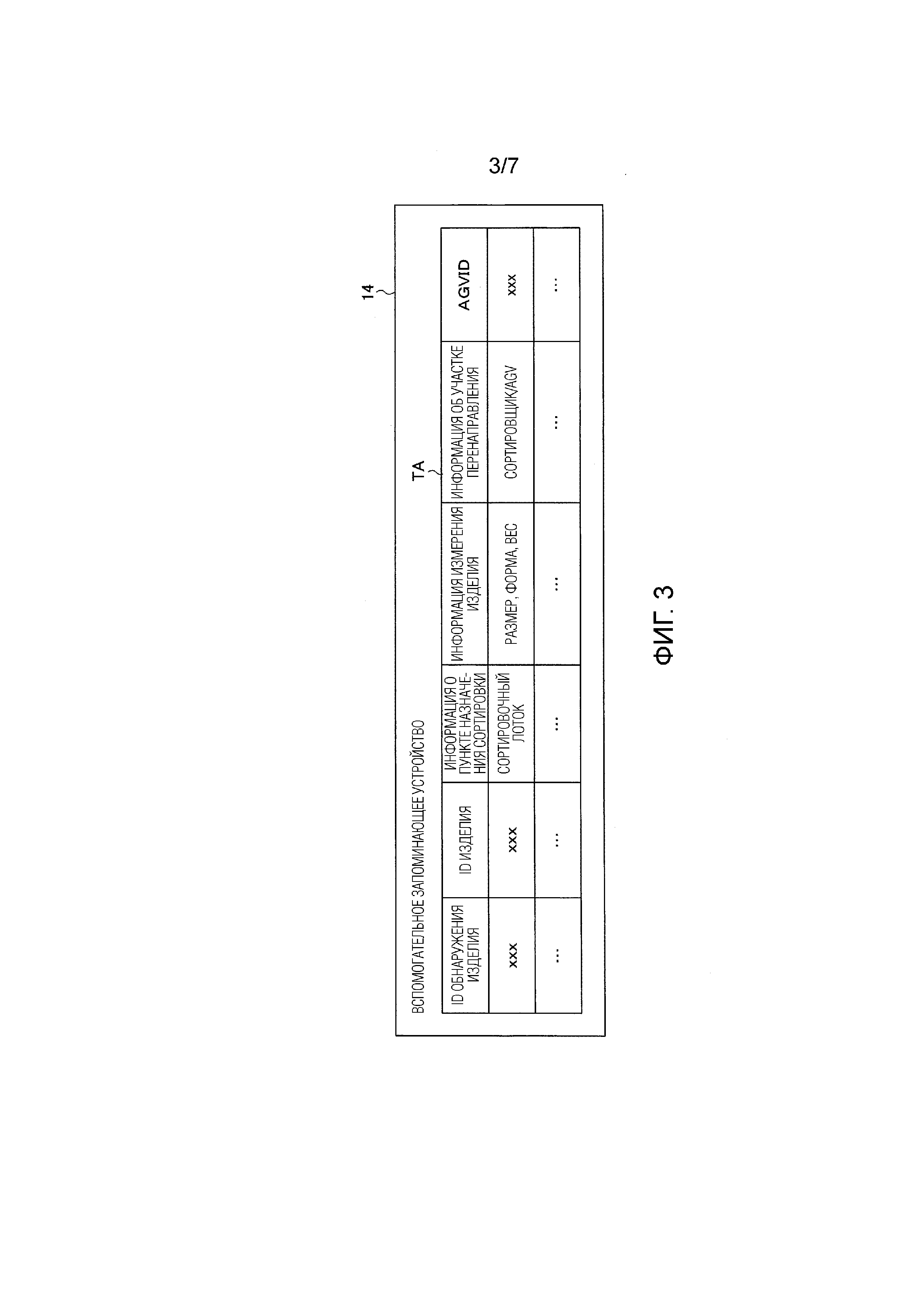
Фиг. 3 - это схема, показывающая одну примерную таблицу TA организации изделий, сохраненную во вспомогательном запоминающем устройстве 14 устройства 1 организации изделий согласно некоторому варианту осуществления.
Как показано на фиг. 3, вспомогательное запоминающее устройство 14 функционирует в качестве запоминающего устройства для хранения таблицы TA организации изделий, и эта таблица TA организации изделий хранит ID изделия, информацию о пункте назначения сортировки, информацию измерения изделия, информацию об участке перенаправления и идентификационную информацию AGV (далее в данном документе "AGVID" или "множество AGVID") в ассоциативной связи с соответствующим ID обнаружения изделия, назначенным каждому из всевозможных обнаруженных изделий c, а именно, изделий c1-c8 здесь. Отметим, что если ID изделия является доступным от всех изделий c, обрабатываемых посредством системы S организации изделий, ID обнаружения изделия не является необходимым. В таких случаях, таблица TA организации изделий хранит информацию о пункте назначения сортировки, информацию измерения изделия, информацию об участке перенаправления и AGVID в ассоциативной связи с соответствующим полученным ID изделия. Процессор 11 затем обнаруживает или оценивает, где каждое из изделий c1-c8 находится, отслеживая перемещение изделий c1-c8, соответствующих их соответственным ID изделия.
Далее, будет описан сортировщик 2. Сортировщик 2 может быть, например, сортировщиком с перекрестной лентой, сортировщиком со скользящим башмаком или сортировщиком с бомбовым отсеком. Сортировщик 2, когда он является сортировщиком с перекрестной лентой, транспортирует изделие c с помощью транспортировочного лотка компонента ленточного транспортера и выпускает изделие c из позиции на транспортировочном лотке в предназначенный сортировочный лоток с помощью вращения ленты транспортера. Сортировщик 2, когда он является сортировщиком со скользящим башмаком, транспортирует изделие c с помощью транспортировочного лотка, и после достижения транспортировочным лотком местоположения предназначенного транспортировочного лотка, наклоняет транспортировочный лоток так, что изделие c соскальзывает в предназначенный сортировочный лоток. Сортировщик 2, когда он является сортировщиком с бомбовым отсеком, транспортирует изделие c с помощью транспортировочного лотка с открываемым дном, и после достижения транспортировочным лотком местоположения над предназначенным сортировочным лотком или желобом, который ведет к предназначенному сортировочному лотку, открывает дно транспортировочного лотка, так что изделие c падает в предназначенный сортировочный лоток или желоб.
Описание этого варианта осуществления будет предполагать, что сортировщик 2 должен быть сортировщиком с бомбовым отсеком. Например, сортировщик 2 включает в себя круговой путь транспортировки с множеством транспортировочных лотков. Эти транспортировочные лотки перемещаются по кругу по пути транспортировки. Изделия c, которые были транспортированы посредством транспортной ленты 9c, помещаются на соответствующие транспортировочные лотки на пути транспортировки сортировщика 2, один транспортировочный лоток загружает одно изделие c для перемещения по кругу по пути транспортировки. Сортировщик 2 открывает дно соответствующего транспортировочного лотка, после того как он достигает местоположения над предназначенным лотком из сортировочных лотков 21-27, и предоставляет возможность изделию c падать в предназначенный сортировочный лоток.
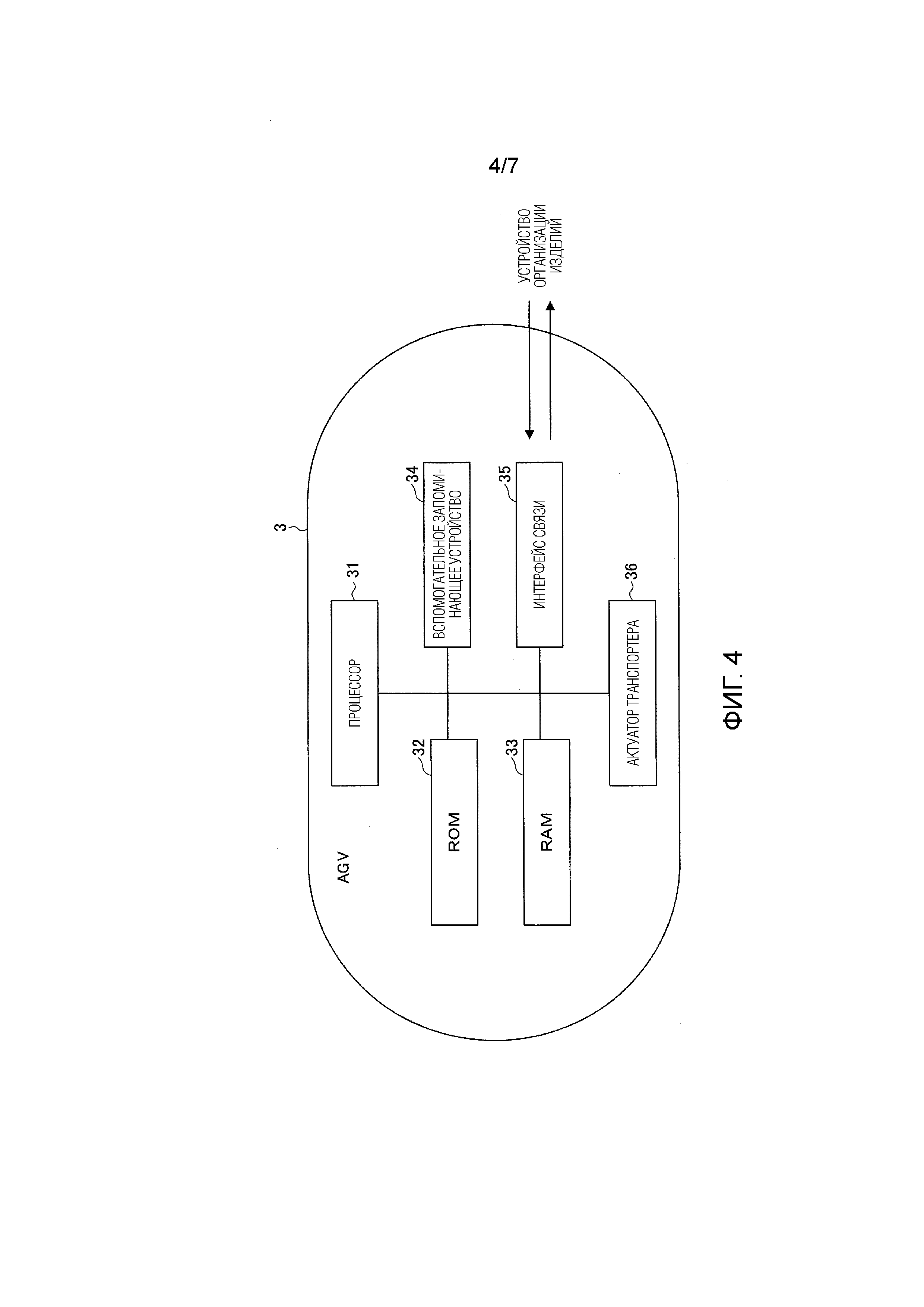
Фиг. 4 - это блок-схема, показывающая одну примерную общую конфигурацию AGV 3 согласно некоторому варианту осуществления.
Каждое AGV 3 может быть автоматическим, колесным роботом, приспособленным для перемещения одного или более изделий c, погруженных в него, к пункту назначения, согласно управляющему сигналу для транспортера от устройства 1 организации изделий. Например, AGV 3 перевозит изделие c в пункт 10 назначения транспортера или местоположение, соответствующее предназначенному лотку из сортировочных лотков 21-27, на основе картографических данных, данных о пункте назначения и данных о текущем местоположении, содержащихся в управляющем сигнале для транспортера. AGV 3 движется сам к пункту назначения, в то же время определяя расстояние и направление своего движения. Например, AGV 3 может быть приспособлено для автоматического движения к пункту назначения посредством следования магнитной ленте или двухмерному штрих-коду, размещенному по маршруту движения. AGV 3 может быть дополнительно оборудовано лазерным датчиком, камерой или т.п. для обнаружения препятствий (включающих в себя другие AGV 3), так что во время движения оно может избегать препятствий, обнаруженных посредством лазерного датчика или идентифицированных посредством анализа изображений, полученных посредством камеры.
Как показано на фиг. 4, каждое AGV 3 включает в себя процессор 31, ROM 32, RAM 33, вспомогательное запоминающее устройство 34, интерфейс 35 связи и актуатор 36 транспортера.
Процессор 31 служит в качестве центральной части компьютера и выполняет вычислительную обработку и управляющую обработку, требуемую для операции перевозки изделий c. Для того, чтобы реализовывать различные функции AGV 3, процессор 31 выполняет управление на основе одной или более программ системного программного обеспечения, прикладного программного обеспечения или микропрограммного обеспечения, хранящегося в ROM 32 или во вспомогательном запоминающем устройстве 34. Процессор 11 может быть, например, CPU, MPU или DSP. Процессор 11 может также быть сочетанием двух или более из них. В одном примерном случае, устройство 1 организации изделий передает управляющий сигнал транспортера для AGV 3 для перемещения в пункт назначения, и процессор 31 выводит сигнал приведения в действие согласно картографическим данным, данным о пункте назначения и данные о текущем местоположении, содержащиеся в этом управляющем сигнале транспортера.
ROM 32 служит в качестве главного запоминающего устройства компьютера, который применяет процессор 31 в качестве центральной части. ROM 32 может быть энергонезависимой памятью, используемой исключительно для считывания данных. ROM 32 может быть энергонезависимым компьютерно-читаемым носителем хранения, хранящим вышеупомянутые одну или более программ. Также, ROM 32 хранит данные для использования процессором 31, чтобы выполнять различную обработку, также как и множество настроечных значений, и т.д.
RAM 33 служит в качестве главного запоминающего устройства компьютера, который применяет процессор 31 в качестве центральной части. RAM 33 является памятью для считывания данных и записи данных. RAM 33 может быть использовано в качестве так называемой рабочей области или т.п. для хранения данных, используемых на временной основе процессором 31, чтобы выполнять различную обработку.
Вспомогательное запоминающее устройство 34 служит в качестве вспомогательного запоминающего устройства компьютера, который применяет процессор 31 в качестве центральной части. Вспомогательное запоминающее устройство 14 может быть EEPROM, HDD, SSD или т.п. Вспомогательное запоминающее устройство 34 может также функционировать в качестве энергонезависимого компьютерно-читаемого носителя хранения, хранящего вышеупомянутую одну или более программ. Вспомогательное запоминающее устройство 34 хранит данные для использования процессором 31, чтобы выполнять различную обработку, данные, сформированные из обработки посредством процессора 31, множество настроечных значений, и т.п.
Интерфейс 35 связи является интерфейсом, приспособленным для связи с другими устройствами по сети и т.д. беспроводным образом. Интерфейс 35 связи принимает различную информацию от других устройств и передает различную информацию другим устройствам. Например, интерфейс 15 связи функционирует как приемник для приема управляющего сигнала для транспортера от устройства 1 организации изделий.
Актуатор 36 транспортера включает в себя мотор, одно или более колес, вращаемых посредством мотора, рулевой механизм для переключения направлений движения и т.п. Актуатор 36 транспортера вращает или останавливает мотор на основе сигнала приведения в действие, выводимого из процессора 31, и управляет рулевым механизмом, так что AGV 3 перемещается к пункту назначения.
Фиг. 5 - это блок-схема последовательности операций, показывающая одну примерную обработку изделия, выполняемую посредством системы S организации изделий согласно некоторому варианту осуществления. Здесь, например, сервер верхнего уровня отправляет ID изделия и информацию о пункте назначения сортировки для каждого субъекта обработки, т.е., изделия c, устройству 1 организации изделий заранее, и таблица TA организации изделий регистрирует эти ID изделий и информацию о пункте назначения сортировки заранее.
Изделия c подаются от устройства 4 подачи изделий системы S организации изделий, и система S организации изделий начинает транспортировку изделий c с помощью транспортных лент 9a, 9b, 9c и 9d и т.д. (ST1). Множество датчиков изделий в системе S организации изделий обнаруживают последовательно транспортируемые изделия c и передают соответствующие сигналы обнаружения устройству 1 организации изделий. Интерфейс 15 связи устройства 1 организации изделий принимает сигналы обнаружения, и процессор 11 назначает ID обнаружения изделий соответствующим изделиям c на основе сигналов обнаружения. Другими словами, процессор 11 регистрирует ID обнаружения изделий в ассоциативной связи с соответствующими, впоследствии обнаруживаемыми изделиями c в таблице TA организации изделий. На этой стадии ID изделий еще не был считаны с транспортируемых изделий c, таким образом, ID изделий, уже и ранее зарегистрированные в таблице TA организации изделий, не могут быть ассоциируемыми с ID обнаружений изделий.
Транспортная лента 9a транспортирует изделия c к устройству 5 измерения изделий. Устройство 5 измерения изделий измеряет, по меньшей мере, одно из размера, формы и веса каждого транспортируемого изделия c (ST2) и передает информацию измерения изделия, полученную из измерения, в устройство 1 организации изделий. Интерфейс 15 связи принимает информацию измерения изделия, и процессор 11 регистрирует информацию измерения изделия в ассоциативной связи с соответствующим ID обнаружения изделия в таблице TA организации изделий.
Процессор 11 также выполняет обработку для определения того, на какой участок каждое изделие c должно быть перенаправлено (определения участка перенаправления), на основе информации измерения изделия (ST3). Здесь, на основе информации измерения изделия, процессор 11 выбирает и выводит управляющий сигнал S11 отклонения для перенаправления изделия c к сортировщику 2 или управляющий сигнал S12 отклонения для перенаправления изделия c к AGV 3. В ответ на то, что процессор 11 выбрал и вывел управляющий сигнал S11 или S12 отклонения, интерфейс 15 связи передает выходной управляющий сигнал S11 или S12 отклонения отклоняющему устройству 6. Обработка для определения участка перенаправления будет описана более подробно позже.
Когда определяется в обработке для определения участка перенаправления, что изделие c должно быть перенаправлено к сортировщику 2, процессор 11 регистрирует информацию об участке перенаправления, указывающую сортировщик 2, в ассоциативной связи с ID обнаружения изделия для изделия c в таблице TA организации изделий. С другой стороны, когда определяется в обработке для определения участка перенаправления, что изделие c должно быть перенаправлено к AGV 3, процессор 11 регистрирует информацию об участке перенаправления, указывающую AGV 3, в ассоциативной связи с ID обнаружения изделия для изделия c в таблице TA организации изделий.
Отклоняющее устройство 6 перенаправляет каждое изделие c к сортировщику 2 или AGV 3 на основе соответствующего результата обработки для определения участка перенаправления (ST4). Т.е., согласно результату обработки для определения участка перенаправления, отклоняющее устройство 6 перенаправляет изделие c к сортировщику 2 в ответ на прием управляющего сигнала S11 отклонения, и перенаправляет изделие c к AGV 3 в ответ на прием управляющего сигнала S12 отклонения.
Когда отклоняющее устройство 6 перенаправило изделие c к сортировщику 2 (ST5, Да), изделие c транспортируется к сортировщику 2 посредством транспортной ленты 9c (ST6). Камера 7a формирует изображение каждого изделия c, транспортируемого посредством транспортной ленты 9c, и выводит данные изображения, полученные от формирования изображения, в считыватель 8 информации изделия. Считыватель 8 информации изделия принимает данные изображения, выведенные из камеры 7a, считывает ID изделия из данных изображения (ST7) и передает ID изделия устройству 1 организации изделий.
Интерфейс 15 связи устройства 1 организации изделий принимает ID изделия от считывателя 8 информации изделия, и процессор 11 ассоциативно связывает принятый ID изделия с ранее зарегистрированным ID изделия в таблице TA организации изделий. В таблице TA организации изделий, следовательно, ID изделия, информация о пункте назначения сортировки, информация измерения изделия и информация об участке перенаправления теперь являются зарегистрированными в ассоциативной связи с ID обнаружения изделия для соответствующего изделия c.
Процессор 11 выполняет обработку для определения пункта назначения сортировки (ST8), чтобы выбирать и выводить информацию о пункте назначения сортировки, ассоциированную с ID обнаружения изделия, и интерфейс 15 связи передает информацию о пункте назначения сортировки сортировщику 2. Сортировщик 2 принимает информацию о пункте назначения сортировки и сортирует соответствующее изделие c в предназначенный лоток из сортировочных лотков 21-27 на основе информации о пункте назначения сортировки (ST9).
Когда, с другой стороны, отклоняющее устройство 6 перенаправило изделие c к AGV 3 (ST5, Нет), изделие c транспортируется к AGV 3 посредством транспортной ленты 9d (ST10). Камера 7b здесь формирует изображение каждого изделия c, транспортируемого посредством транспортной ленты 9d, и выводит данные изображения, полученные от формирования изображения, в считыватель 8 информации изделия. Считыватель 8 информации изделия принимает данные изображения, выведенные из камеры 7b, считывает ID изделия из данных изображения (ST11) и передает ID изделия устройству 1 организации изделий.
Интерфейс 15 связи устройства 1 организации изделий принимает ID изделия от считывателя 8 информации изделия, и процессор 11 ассоциативно связывает принятый ID изделия с ранее зарегистрированным ID изделия в таблице TA организации изделий. В таблице TA организации изделий, следовательно, ID изделия, информация о пункте назначения сортировки, информация измерения изделия и информация об участке перенаправления теперь являются зарегистрированными в ассоциативной связи с ID обнаружения изделия для соответствующего изделия c.
Процессор 11 выполняет обработку для определения пункта назначения сортировки (ST12), чтобы выбирать и выводить данные о пункте назначения, соответствующие информации о пункте назначения сортировки, ассоциированной с ID изделия. Интерфейс 15 связи связывается с одним из множества AGV 3, которое находится в режиме ожидания перевозки изделия, так что интерфейс 15 связи принимает AGVID от этого AGV 3 и передает управляющий сигнал для транспортера, содержащий картографические данные, данные о пункте назначения, данные о текущем местоположении и т.д., этому AGV 3.
AGV 3 принимает управляющий сигнал для транспортера и перевозит изделие c, погруженное на него, в пункт назначения на основе картографических данных, данных о пункте назначения и данных о текущем местоположении, содержащихся в управляющем сигнале для транспортера (ST13). Например, данные о пункте назначения указывают пункт 10 назначения транспортера. Данные о пункте назначения могут вместо этого указывать местоположение, соответствующее предназначенному лотку из сортировочных лотков 21-27.
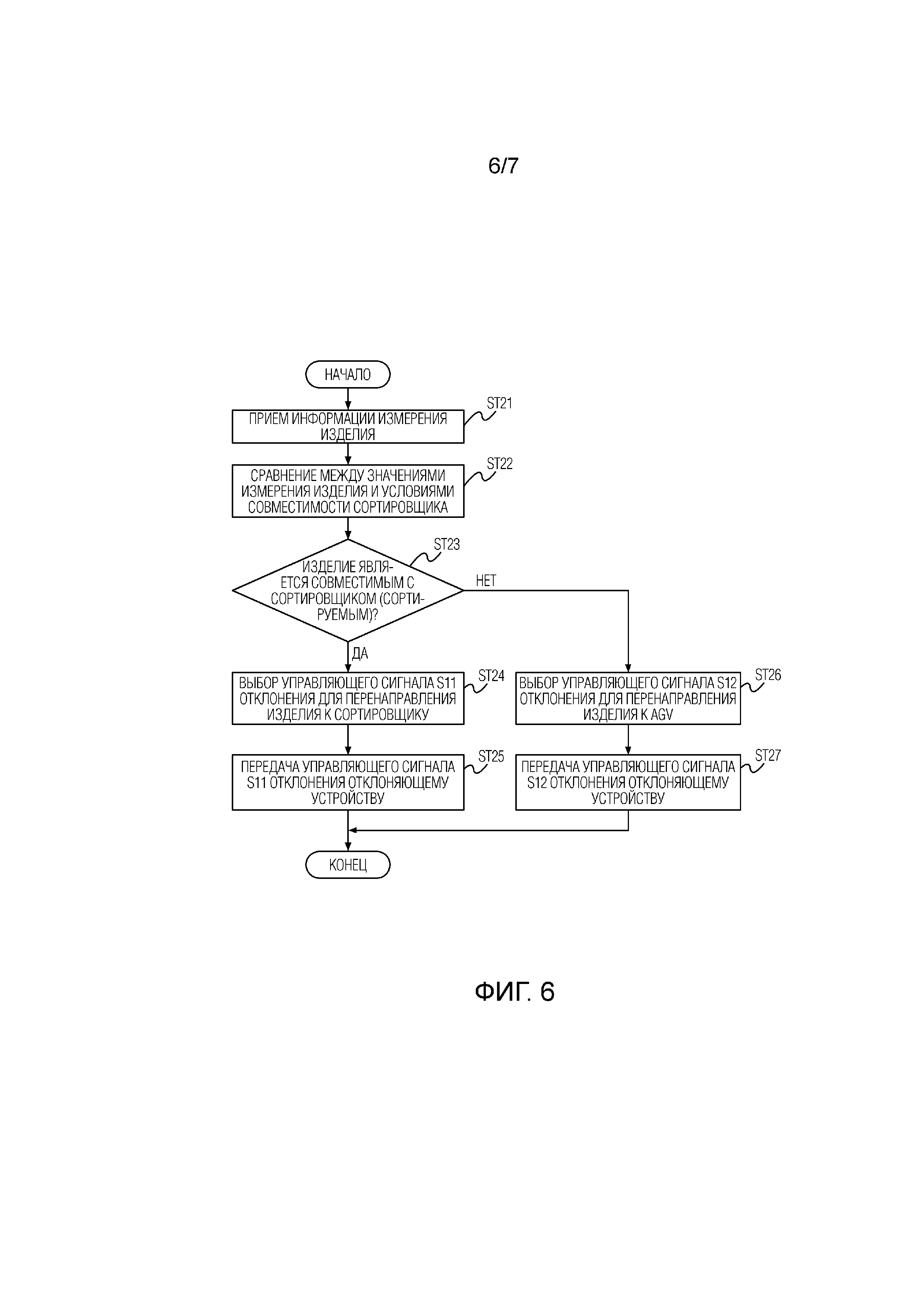
Фиг. 6 - это блок-схема последовательности операций, показывающая одну примерную обработку для определения участка перенаправления изделия (т.е., ST3 на фиг. 5), выполняемую посредством системы S организации изделий согласно некоторому варианту осуществления.
Как показано на фиг. 6, процессор 11 принимает информацию измерения изделия, переданную от устройства 5 измерения изделий (ST21), выполняет сравнение между значениями измерения изделия, содержащимися в информации измерения изделия, и условиями, зарегистрированными во вспомогательном запоминающем устройстве 34 для совместимости с сортировщиком 2 (ST22), и определяет, является или нет соответствующее изделие c совместимым со спецификацией сортировщика 2 (ST23). Примеры таких условий совместимости включают в себя пороговые критерии для определения того, может ли изделие c быть отсортировано посредством сортировщика 2, или изделие c не является подходящим объектом для сортировки посредством сортировщика 2. Процессор 11 сравнивает значения измерения изделия с пороговыми критериями и определяет на основе результата сравнения, что изделие c может быть отсортировано посредством сортировщика 2, или что изделие c не является подходящим объектом для сортировки посредством сортировщика 2.
Например, условия совместимости сортировщика 2 могут применять верхнее предельное значение или нижнее предельное значение для суммы измерений изделия c в направлениях X-оси, Y-оси и Z-оси (далее в данном документе "размер по трем сторонам"). Процессор 11 сравнивает размер по трем сторонам, извлеченный из значений измерения изделия, с верхним предельным значением или нижним предельным значением, и если размер по трем сторонам найден выше верхнего предельного значения или ниже нижнего предельного значения, процессор 11 определяет, что изделие c не является совместимым с сортировщиком 2, т.е., изделие c не является подходящим объектом для сортировки посредством сортировщика 2. Если размер по трем сторонам найден равным или ниже верхнего предельного значения, или найден равным или выше нижнего предельного значения, процессор 11 определяет, что изделие c является совместимым с сортировщиком 2, т.е., изделие c может быть отсортировано посредством сортировщика 2. В другом случае, условия совместимости могут применять как верхнее предельное значение, так и нижнее предельное значение для размера по трем сторонам. В этом случае, процессор 11 может быть приспособлен для определения, если размер по трем сторонам больше верхнего предельного значения или меньше нижнего предельного значения, что изделие c не является совместимым с сортировщиком 2 (изделие c не является подходящим объектом для сортировки посредством сортировщика 2), и определять, если размер по трем сторонам является равным или ниже верхнего предельного значения, а также равным или выше нижнего предельного значения, что изделие c является совместимым с сортировщиком 2 (изделие c может быть отсортировано посредством сортировщика 2). Кроме того, условия совместимости могут вместо этого или дополнительно применять, по меньшей мере, один из верхнего предельного веса и нижнего предельного веса, также как условие для формы. Например, условия совместимости могут включать в себя форму или геометрические параметры для определения того, что формы, такие как легко катящиеся сферы и цилиндры не являются подходящими объектами для сортировки посредством сортировщика 2.
Когда определяется на основе информации измерения изделия, что изделие c является совместимым со спецификацией сортировщика 2, и, следовательно, является сортируемым (ST23, Да), процессор 11 выбирает и выводит управляющий сигнал S11 отклонения для перенаправления изделия c к сортировщику 2 (ST24). Интерфейс 15 связи передает управляющий сигнал S11 отклонения отклоняющему устройству 6 (ST25). Отклоняющее устройство 6 принимает управляющий сигнал S11 отклонения и на его основе перенаправляет изделие c к сортировщику 2.
С другой стороны, когда определяется на основе информации измерения изделия, что изделие c не является совместимым со спецификацией сортировщика 2, и, следовательно, является неподходящим для сортировки (ST23, Нет), процессор 11 выбирает и выводит управляющий сигнал S12 отклонения для перенаправления изделия c к AGV 3 (ST26). Интерфейс 15 связи передает управляющий сигнал S12 отклонения отклоняющему устройству 6 (ST27). Отклоняющее устройство 6 принимает управляющий сигнал S12 отклонения и на его основе перенаправляет изделие c к AGV 3.
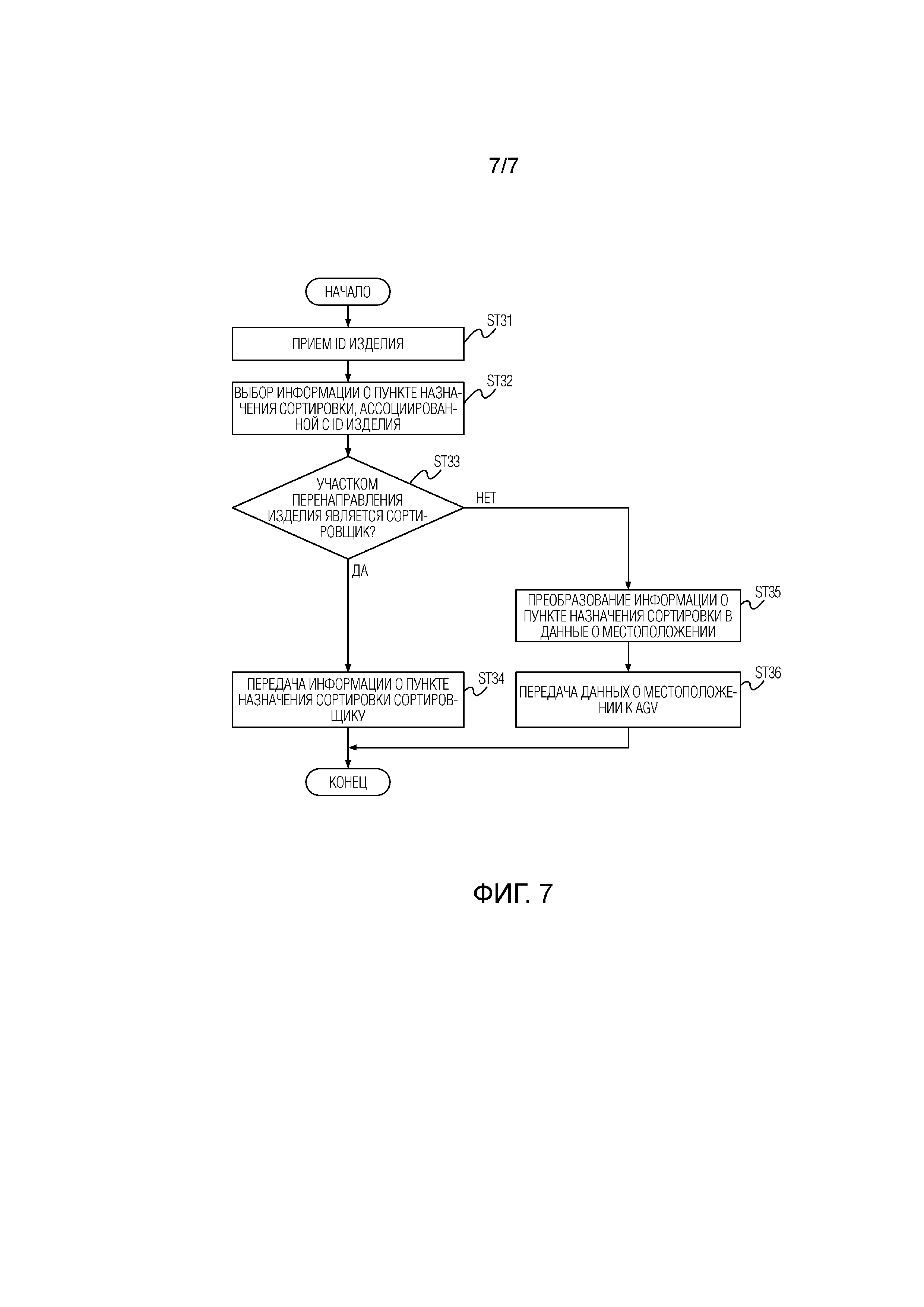
Фиг. 7 - это блок-схема последовательности операций, показывающая одну примерную обработку для определения пункта назначения сортировки (т.е., ST8 и ST12 на фиг. 5), выполняемую посредством системы S организации изделий согласно некоторому варианту осуществления.
Как показано на фиг. 7, процессор 11 принимает ID изделия, переданный от считывателя 8 информации изделия (ST31), и выбирает информацию о пункте назначения сортировки, ассоциированную с этим ID изделия, в таблице TA организации изделий (ST32).
Когда участок перенаправления на основе определения "сортируемости" (далее в данном документе "определения d1") на этапе ST3 обработки для определения участка перенаправления для соответствующего изделия c является сортировщиком 2 (ST33, Да), процессор 11 выбирает информацию о пункте назначения сортировки для передачи сортировщику 2. Процессор 11 также предоставляет инструкцию для передачи информации о пункте назначения сортировки сортировщику 2. Следуя этой инструкции, интерфейс 15 связи передает информацию о пункте назначения сортировки сортировщику 2 (ST34). Сортировщик 2 сортирует изделие c в предназначенный лоток из сортировочных лотков 21-27 на основе информации о пункте назначения сортировки.
С другой стороны, когда участок перенаправления на основе определения "неподходящего для сортировки" (далее в данном документе "определения d2") на этапе ST3 обработки для определения участка перенаправления для соответствующего изделия c является AGV 3 (ST33, Нет), процессор 11 выбирает управляющий сигнал для транспортера для передачи к AGV 3. Дополнительно, процессор 11 преобразует информацию о пункте назначения сортировки в данные о пункте назначения (ST35). Процессор 11 предоставляет инструкцию для передачи управляющего сигнала для транспортера, содержащего картографические данные, данные об этом пункте назначения, данные о текущем местоположении и т.д., к AGV 3. Следуя этой инструкции, интерфейс 15 связи передает управляющий сигнал для транспортера, содержащий картографические данные, данные о пункте назначения, данные о текущем местоположении и т.д., к AGV 3 (ST36). Здесь, например, процессор 11 может ссылаться на сигналы обнаружения от множества датчиков изделий, чтобы обнаруживать или рассчитывать изделие c, которое было погружено на одно AGV 3, и управлять передачей управляющего сигнала для транспортера, так что управляющий сигнал для транспортера предоставляется AGV 3 согласно моменту обнаружения или расчета. В этом случае, AGV 3, по приеме управляющего сигнала для транспортера, предоставляется возможность непосредственно переходить к своей операции перевозки на основе управляющего сигнала для транспортера. Альтернативно или дополнительно, каждое AGV 3 может также включать в себя датчик изделия, так что интерфейс 15 связи передает управляющий сигнал для транспортера в любой желаемый момент времени, и AGV 3 начинает операцию перевозки на основе управляющего сигнала для транспортера после обнаружения собственной погрузки изделия c посредством своего датчика изделия.
Например, данные о пункте назначения являются данными о местоположении, соответствующими месту 10 назначения для транспортера. Данные о пункте назначения могут вместо этого быть данными о местоположении, соответствующими предназначенному лотку из сортировочных лотков 21-27. Согласно одной примерной конфигурации вспомогательное запоминающее устройство 14 хранит, в качестве первоначальной настройки для системы S организации изделий, данные о местоположении, соответствующие пункту 10 назначения для транспортера, или данные о местоположении, соответствующие соответственному лотку из сортировочных лотков 21-27, в соответствии с инструкциями от сервера верхнего уровня или оператора. В этом случае, когда данные о местоположении, соответствующие пункту 10 назначения для транспортера, находятся в запоминающем устройстве, процессор 11 преобразует информацию о пункте назначения сортировки в данные о местоположении, соответствующие пункту 10 назначения транспортера. Когда данные о местоположении, соответствующие соответственному лотку из сортировочных лотков 21-27, находятся в запоминающем устройстве, и информация о пункте назначения сортировки указывает сортировочный лоток 21, процессор 11 преобразует информацию о пункте назначения сортировки в данные о местоположении, соответствующие сортировочному лотку 21.
Варианты осуществления, которые были описаны, могут предлагать устройство организации изделий, систему организации изделий и программу, каждое из которых реализует эффективную обработку большого множества изделий даже с ограниченными возможностями сортировщика. Варианты осуществления могут также предлагать энергонезависимый компьютерно-читаемый носитель, хранящий программу, которая инструктирует компьютеру выполнять эффективную обработку большого разнообразия изделий даже с ограниченными возможностями сортировщика.
Согласно одному примеру, устройство 1 организации изделий выбирает управляющий сигнал S11 или S12 отклонения на основе информации измерения изделия и передает выбранный управляющий сигнал S11 или S12 отклонения отклоняющему устройству 6. Отклоняющее устройство 6 затем перенаправляет изделия c, которые могут быть обработаны посредством сортировщика 2 системы S организации изделий (изделия c с определением d1), непосредственно по направлению к сортировщику 2. Также, отклоняющее устройство 6 перенаправляет изделия c, которые не подходят для обработки сортировщика 2 (изделия c с определением d2), по направлению к множеству AGV 3. Таким образом, широкое разнообразие изделий может быть обработано эффективно с ограниченными возможностями сортировщика.
В качестве ограниченных возможностей сортировщика, установленный сортировщик 2 может быть одним, или более одного. Например, система S организации изделий может включать в себя два сортировщика 2, но даже использование двух сортировщиков 2 не предоставит возможности практической обработки всех видов изделий. Согласно вариантам осуществления, изделия c, которые не могут быть подходящим образом обработаны посредством этих сортировщиков 2 (изделия c с определением d2), перевозятся посредством множества AGV 3 в предназначенные пункты назначения, и, следовательно, все изделия c могут быть эффективно обработаны без необходимости ручной работы операторов и т.д.
Кроме того, является возможным согласно вариантам осуществления, что устройство 1 организации изделий передает управляющие сигналы для транспортеров множеству AGV 3, чтобы инструктировать каждому AGV 3 перевозить изделие c в любой желаемый пункт назначения. Например, устройство 1 организации изделий передает управляющий сигнал для транспортера, содержащий данные о пункте назначения, соответствующие пункту назначения 10 транспортера, так что оно может инструктировать AGV 3 перевозить изделие c в местоположение, соответствующее пункту 10 назначения транспортера. Также, устройство 1 организации изделий обнаруживает сортировочный лоток (один из сортировочных лотков 21-27), соответствующий информации о пункте назначения сортировки, и передает управляющий сигнал транспортера, содержащий данные о пункте назначения, соответствующие этому обнаруженному сортировочному лотку, так что оно может инструктировать AGV 3 перевозить изделие c в соответствующее местоположение. Т.е., варианты осуществления предоставляют возможность доставки изделий c в местоположения, соответствующие предназначенным сортировочным лоткам, без маршрутизации их через сортировщик 2.
Также, согласно одному пример применения устройства 1 организации изделий, только установление сетевого соединения между устройством 1 организации изделий, сортировщиком 2, множеством AGV 3 и дискретно сконфигурированным отклоняющим устройством 6 может формировать систему S организации изделий. Варианты осуществления не накладывают конкретное ограничение на сортировщик 2, множество AGV 3 и отклоняющее устройство 6.
В то время как некоторые варианты осуществления были описаны, они были представлены только в качестве примера и не предназначены, чтобы ограничивать рамки изобретения. В действительности, новые варианты осуществления, описанные в данном документе, могут быть осуществлены во множестве других форм. Кроме того, различные пропуски, замены и изменения в форме вариантов осуществления могут быть выполнены без отступления от духа изобретения. Сопровождающая формула изобретения и ее эквиваленты предназначены, чтобы охватывать такие формы или модификации как попадающие в рамки и дух изобретения.
Реферат
Группа изобретений относится к области транспортировки изделий и может быть использована для автоматической сортировки изделий. Техническим результатом является повышение эффективности сортировки и обработки большого количества изделий. Устройство содержит приемник, процессор и передатчик. Приемник конфигурируется, чтобы принимать информацию измерения изделия. Процессор конфигурируется, чтобы выбирать первый управляющий сигнал отклонения или второй управляющий сигнал отклонения на основе информации измерения изделия, первый управляющий сигнал отклонения предназначен для перенаправления изделия к сортировщику, сконфигурированному, чтобы сортировать изделие согласно информации о пункте назначения сортировки, соответствующей изделию, второй управляющий сигнал отклонения предназначен для перенаправления изделия к транспортеру. Передатчик конфигурируется, чтобы передавать первый или второй управляющий сигнал отклонения отклоняющему устройству, сконфигурированному, чтобы перенаправлять изделие к сортировщику или транспортеру. 3 н. и 6 з.п. ф-лы, 7 ил.
Комментарии