Система для обнаружения и отбраковки из металлолома твердо/жидко/газонаполненных объектов - RU2744531C1
Код документа: RU2744531C1
Чертежи



Описание
Изобретение относится к обнаружению и отбраковке из металлолома объектов (боеприпасов, сосудов, малых емкостей, патрубков, огнетушителей, малых газобаллонов, пневматической подвески автомобилей и прочее) наполненных, легко воспламеняющимися или взрывоопасными веществами в твердой, жидкой или газообразных фазах и может быть использовано в области металлопереработки.
К проблемам организаций, занимающихся переработкой металлолома приводящим к простою металлоперерабатывающих печей, относится наличие в металлоломе объектов, наполненных веществами, находящимися в твердой, жидкой или газообразной фазах. Эти объекты могут быть наполнены легко воспламеняющимися или взрывоопасными веществами приводящие к взрывам и частичному разрушению печей и как следствие, к их простою. Поэтому выявление и отбраковка вышеуказанных объектов является одной из важнейших задач металлоперерабатывающих организаций. На данный момент этот процесс представляет собой визуальную регистрацию и нахождение объектов. А это связано с большими затратами. При этом эффективность выявления объектов человеком достаточно низка поскольку выявить наличие вещества находящегося внутри детали металлолома визуально невозможно. Автоматизация этого процесса и повышение эффективности выявления и отбраковки из металлолома вышеуказанных объектов на данный момент является актуальной задачей металлоперерабатывающих организаций.
Известен многочелюстной гидравлический грейфер (см. патент №2314991 от 20.01.2008 г.). Данный грейфер содержит несущую конструкцию, закрепленные на ней шарнирно челюсти и гидропривод их перемещения, включающий связанные с каждой челюстью гидроцилиндры, штоковые и поршневые полости которых посредством трубопроводов соединены через гидрораспределитель с гидронасосом и сливной магистралью. Несущая конструкция выполнена в виде полого цилиндра, по боковой поверхности которого расположены карманы для размещения гидроаппаратуры, закрытые кожухами. В нижней части цилиндра за одно целое с ним выполнена емкость для рабочей жидкости гидросистемы. Гидроцилиндры челюстей закрыты кожухами и снабжены гидрозамками, установленными на трубопроводах подачи рабочей жидкости в их поршневую полость.
Данный многочелюстной гидравлический грейфер, позволяет обеспечить надежную и безопасную перегрузку металлолома, однако он не предназначен для выявления и отбраковки из металлолома /твердо/жидко/газо наполненных объектов.
Наиболее близким техническим решением к предлагаемому техническому решению задачи является «Устройство для обнаружения и точного наведения грузозахватного механизма на затонувшую древесину, (см. патент №2245836 от 10.02.2005 г.).
Устройство по вышеуказанному патенту включает грейфер, датчик эхолота, блок обработки сигнала и дисплей. При этом датчик эхолота установлен непосредственно на криволинейной челюсти грузозахватного механизма с возможностью распространения области его сигнала в форме конуса с вершиной в датчике как в сторону от грузозахватного механизма, так и в одном направлении с его рабочей областью. Данное устройство позволяет оператору находить удаленные топляки и осуществлять точное наведение грейфера на топляк по изображению, сформированному на дисплее эхолота в результате обработки отраженного сигнала, но оно не может быть в должной мере использовано для выявления объектов, наполненных веществами, находящимися в твердой, жидкой или газообразной фазах.
Техническим результатом предложенного технического решения задачи является обнаружение и отбраковка из металлолома объектов (боеприпасов, сосудов, малых емкостей, патрубков, огнетушителей, малых газобаллонов, пневматической подвески автомобилей и прочее) наполненных, веществами в твердой, жидкой или газообразных фазах, представляющими угрозу выхода из строя металлоперерабатывающих печей.
Также техническим результатом предложенного технического решения задачи является снижение трудоемкости процесса выявления вышеуказанных объектов за счет его автоматизации.
Технический результат достигается тем, что в устройстве для обнаружения и отбраковки из металлолома /твердо/жидко/газо наполненных объектов, включающее грузозахватный механизм состоящий из корпуса с шарнирно прикрепленными к нему приводными челюстями снабженных устройством детектирования, блок обработки сигнала и дисплей, к грузозахватному механизму подведена гибкая паропроводящая труба связанная с полым торообразным элементом закрепленным на корпусе и снабженным форсунками установленными со стороны приводных челюстей в нижней части которых встроен тепловизор, устройство детектирования и электромагнит.
Преимущественно чтобы, устройство для обнаружения и отбраковки из металлолома /твердо/жидко/газо наполненных объектов, было снабжено периферийными видеокамерами, размещенными по периметру территории выгрузки металлолома.
Преимущественно чтобы, устройство для обнаружения и отбраковки из металлолома /твердо/жидко/газо наполненных объектов, было снабжено периферийными тепловизорами размещенными по периметру территории выгрузки металлолома.
Преимущественно чтобы, паропроводящая труба была связанна с полым торообразным элементом через патрубок размещенный в корпусе.
Преимущественно чтобы, нижняя часть приводные челюстей была снабжена торцевыми ребрами.
На фиг. 1 - показан общий вид грузозахватного механизма.
На фиг. 2 - показан вид А на фиг. 1.
На фиг. 3 - представлена территория выгрузка металлолома с размещенными по периметру периферийные видеокамерами и тепловизорами.
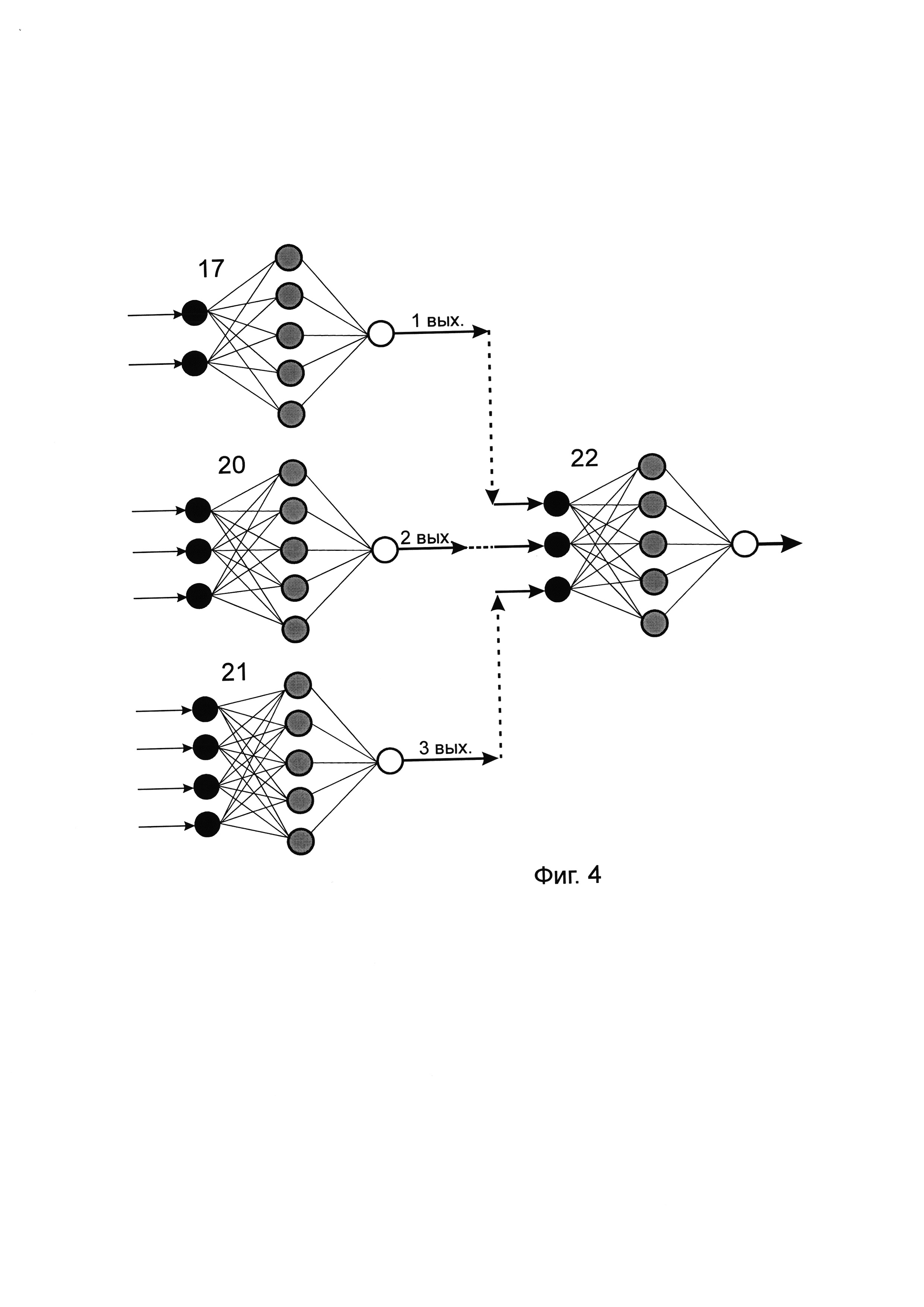
На фиг. 4 - представлена нейронная сеть.
На фиг.5 - показан грузозахватный механизм с раскрытыми приводным челюстями.
На фиг. 6 - показано место 1 на фиг. 5.
Предложенное техническое решение задачи включает грузозахватный механизм 1 состоящий из корпуса 2 с шарнирно прикрепленными к нему приводными челюстями 3 (фиг. 1 и фиг. 2). К грузозахватному механизму 1 подведена гибкая паропроводящая труба 4 связанная с полым торообразным элементом 5 через патрубок 6 размещенный в корпусе 2. Полый торообразный элемент 5 закреплен на корпусе 2 грузозахватного механизма 1 и снабжен форсунками 7 установленными со стороны приводных челюстей 3. В нижней части каждой из приводных челюстей 3 встроен тепловизор 8, устройство детектирования 9 и электромагнит 10 (фиг. 5 и фиг. 6). Допустима реализация предложенного технического решения задачи с использованием пары противолежащих приводных челюстей 3 со встроенными тепловизором 8 и устройством детектирования 9.
Для повышения сохранности устройства детектирования 9 нижняя часть приводных челюстей 3 снабжена торцевыми ребрами 11.
По периметру территории 12 на которую производится выгрузка металлолома размещены периферийные видеокамеры 13 и периферийные тепловизоры 14 (фиг. 3).
Предложенное техническое решение задачи работает следующим образом.
В момент подачи манипулятором 15 грузозахватного механизма 1 в железнодорожный вагон, (фиг. 1 и фиг. 3) встроенное устройство детектирования 9 размещенное в нижней части каждой из приводных челюстей 3 идентифицирует лежащий в железнодорожном вагоне металлолом на предмет наличия объекта 16 При этом β - угол обзора поверхности железнодорожного вагона устройством детектирования 9.
В данном случае индентификация осуществляется по типоразмерам объекта 16. К данным типоразмерам относятся; боеприпасы, сосуды, малые емкости, заглушенные патрубки, огнетушители, малые газобаллоны, пневматическая подвеска автомобилей и прочее.
Распознание объектов 16 по типоразмерам осуществляется по нейронной сети 17 и определяется двумя входными параметрами - габариты и форма металлолома (фиг. 4). В случае обнаружения объекта 16 одним из устройств детектирования 9, подается сигнал в блок обработки сигнала 18. С блока обработки сигнала 18 подается изображение места расположения объекта 16 на мониторы оператора манипулятора 15 и на дисплей 19 офисного компьютера. Оператор манипулятора 15 обнаружив на своем мониторе место расположения объекта 16 размещает над ним грузозахватный механизм 1 с раскрытыми приводными челюстями 3 (фиг. 5 и фиг. 6). После опускания грузозахватного механизма 1 на металлолом, приводные челюсти 3, сжимаются и грузозахватный механизм 1 вместе с металлоломом извлекается из железнодорожного вагона.
Для более эффективного обнаружения объектов 16, в предложенном техническом решении задачи добавлен критерий изменения температуры металлолома под воздействием горячего пара. Реализация данного критерия осуществляется следующим образом. В момент извлечения металлолома из железнодорожного вагона, тепловизор 8, производит измерение температуры металлолома, находящегося в грузозахватном механизме 1 и передает данные в блок обработки сигнала 18. После чего блок обработки сигнала 18 подает команду на подачу горячего пара. Горячий пар двигаясь по гибкой пароподводящей трубе 4 проходит патрубок 6 и поступив в полый торообразный элемент 5 разбрызгивается на металлолом из форсунок 7.
За время перемещения грузозахватного механизма 1 в зону выгрузки горячий пар, выходящий из форсунок 7 успевает нагреть металлолом на 1 -2 град, в то время как объекты 16, заполненные веществами в твердом, жидком или газообразном состоянии нагреваются на 0,3 -0,5 градуса, что обусловлено более высокой их теплоемкостью.
Кроме разности в теплоемкости, объекты 16, являющиеся как правило, герметичными сосудами и за время перемещения грузозахватного механизма 1 в зону выгрузки их сложно прогреть, так как взаимодействие с горячим паром у них имеет место лишь по внешней поверхности объектов 16, в то время как любой металлопрокат, например, отрезок уголка или швеллера контактируют с горячим паром по всей поверхности (внешней и внутренней) и поэтому прогреваются быстрее. После размещения грузозахватного механизма 1 над местом выгрузки оператор манипулятора 15 выключает подачу горячего пара.
Как известно, точность показаний тепловизора 8, составляет порядка 0.1-0.01 градуса. Поэтому, когда приводные челюсти 3, разжимаются и металлолом начинает падать, тепловизоры 8 каждой приводной челюсти 3, фиксируют изменение температуры элементов металлолома после воздействия горячего пара.
При обнаружении одним из тепловизоров 8 в металлоломе объекта 16, за счет несоответствия его температуры указанный тепловизор 8 передает информацию в блок обработки сигнала 18, который используя базу данных по изменению температурного режима металлолома под воздействием горячего пара распознает объекты 16 используя нейронную сеть 20 имеющую три входных параметра - масса, габариты и изменение температуры металлолома (фиг. 4).
Для увеличения эффективности обнаружения объектов 16, в предложенном техническом решении задачи добавлен критерий изменения траектории падения металлолома под воздействием электромагнита 10.
С этой целью в нижней части каждой из приводных челюстей 3 встроен электромагнит 10. Электромагнит 10 включается в момент открытия приводных челюстей 3. Падающий металлолом пролетая мимо электромагнита 10 отклоняется от траектории вертикального падения, при этом траектория падения объектов 16 имеет более пологую траекторию поскольку они имеют меньшую удельную плотность из-за наличия веществ в твердом, жидком или газообразном состоянии) в сравнении с общей массой металлолома. Блок обработки сигнала 18, используя базу данных по траектории падения металлолома под воздействием электромагнита 10 распознает объекты 16 используя нейронную сеть 21 имеющая четыре входных параметра - изменение траектория падения металлолома под воздействием электромагнита, масса, габариты и форма (фиг. 4).
Таким образом в предложенном техническом решении задачи, обнаружение и отбраковка объектов 16, осуществляется по трем критериям:
1. Идентификация по типоразмеру.
2. Идентификация по изменению температуры под воздействием горячего пара.
3. Идентификация по изменению траектории падения под воздействием электромагнита.
Все перечисленные идентификации осуществляются с использованием нейронных сетей 17, 20 и 21, и полученные от них решения являются входными данными (нейронами) для нейронной сети 22, которая выдает искомое решение по отбраковке объекта 16 (фиг. 4).
После выгрузки металлолома периферийные видеокамеры 13 размещенные по периметру территории 12 хранения металлолома фиксируют место выгрузки. Кроме этого периферийные тепловизоры 14 в момент выгрузки дополнительно осуществляют контроль данных по температуре объекта 16. Данные с периферийных видеокамер 13 и периферийных тепловизоров 14 передаются в блок обработки сигнала 18. Место выгрузки объекта 16 фиксируется на дисплее 19 офисного компьютера. Удаление объекта 16 производится спец манипулятором (не показано) обеспечивающим безопасность оператора.
Предложенном техническом решении задачи позволяет:
- повысить эффективность обнаружения и отбраковки из металлолома /твердо/жидко/газо наполненных объектов;
- обеспечить автоматизацию процесса выявления объектов из металлолома.
Реферат
Изобретение относится к области металлопереработки, а именно к системе обнаружения и отбраковки из металлолома объектов, наполненных веществами в твердой, жидкой или газообразных фазах. Система для обнаружения и отбраковки из металлолома твердо/жидко/газонаполненных объектов включает грузозахватный механизм, состоящий из корпуса с шарнирно прикрепленными к нему приводными челюстями, снабженными устройством детектирования с идентификацией по месту расположения, блок обработки сигнала и дисплей. К грузозахватному механизму подведена гибкая паропроводящая труба, связанная с полым торообразным элементом, закрепленным на корпусе и снабженным форсунками, установленными со стороны приводных челюстей, в нижней части которых встроен тепловизор, электромагнит и устройство детектирования с идентификацией по типоразмеру объектов, связанные с блоком обработки сигнала и монитором, причем в качестве устройства детектирования с идентификацией по типоразмеру объектов используется видеокамера. Технический результат заключается в повышении эффективности обнаружения и отбраковки из металлолома твердо/жидко/газонаполненных объектов. 2 з.п. ф-лы, 6 ил.
Формула
Документы, цитированные в отчёте о поиске
Грейфер и клещевой захват грейфера
Комментарии