Устройство погружения - RU2526731C2
Код документа: RU2526731C2
Чертежи






Описание
Область техники
Настоящее изобретение относится к устройству погружения для переворачивания изделия, доставленного в неподвижно закрепленном состоянии на перемещающемся по конвейеру теле, верхней стороной вниз вместе с перемещающимся по конвейеру телом, осуществления погружения в ванну обработки и выполнения поверхностной обработки изделия.
Уровень техники
Этот тип устройства погружения известен в качестве устройства погружения для выполнения поверхностной обработки кузова автомобиля. Более точно, этот тип устройства погружения включает в себя ванну обработки, в которую погружается изделие для его обработки, горизонтальный шпиндель, пересекающий ванну обработки сверху, поворотное основание, поддерживаемое с возможностью вращения вокруг горизонтального шпинделя, приводящее средство, для вращения поворотного основания в направлении вперед и назад между положением ожидания, когда оно находится, по существу, горизонтально над ванной обработки, и положением переворота, когда оно поворачивается в направлении вперед и вниз из положения ожидания и обращается верхней частью вниз, направляющее средство перемещающегося тела, предоставленное на поворотном основании с тем, чтобы поддерживать и направлять перемещение перемещающегося по конвейеру тела вдоль направления назад и вперед, ортогонального горизонтальному шпинделю, в котором перемещающееся по конвейеру тело, на которое нагружено и неподвижно закреплено изделие, может быть переведено с наземной линии перемещения на направляющее средство перемещающегося тела поворотного основания в положении ожидания, как описано в патентном документе 1. В конфигурации, как описано в патентном документе 1, в качестве перемещающегося на конвейере тела используется плита без колес, а в качестве наземной линии перемещения и направляющего средства перемещающегося тела на поворотном основании используются роликовые конвейеры, поддерживающие плиту перемещая ее.
[Документы предшествующего уровня техники]
Патентный документ 1: Японский патент № 3638283 (японский перевод международной заявки № H09-510681)
Задачи, на решение которых направлено изобретение
В традиционном устройстве погружения, как описано в вышеприведенном патентном документе 1, ванна обработки размещена под линией перемещения перемещающегося по конвейеру тела (плиты) вдоль линии. Перемещающееся по конвейеру тело выполнено для передвижения на поворотное основание в положение ожидания с заднего конца поворотного основания, а далее позиционирования и неподвижного закрепления. В этом состоянии, поворотное основание вращается. Изделие поворачивается верхней стороной вниз вместе с перемещающимся по конвейеру телом и погружается в ванну обработки. Поворотное основание возвращается в положение ожидания, а затем перемещающееся по конвейеру тело передвигается вперед на наземную линию перемещения с переднего конца поворотного основания.
В таком устройстве погружения, в котором перемещающееся по конвейеру тело выполнено для прохождения и перемещения в отношении ванны обработки, как также описано в патентном документе 1, когда поворотное основание, позиционированное непосредственно под центром всей длины изделия (кузова автомобиля), вращается вокруг горизонтального шпинделя, расположенного рядом с его передним концом для сокращения требуемой направленной спереди назад длины для ванны обработки, поворотное основание во время вращения в значительной степени выступает вперед в отношении горизонтального шпинделя. Как результат, требуются такие меры, как соединение наземного пути перемещения с передним концом поворотного основания, более точно, направляющим рельсам и роликовым конвейерам позволяется уходить вбок во время поворота поворотного основания для того, чтобы наземная линия перемещения, соединяемая с передним концом поворотного основания, не сталкивалась с поворотным основанием. Это приводит к значительным затратам на оборудование. Дополнительно, является обязательным средство позиционирования и неподвижного закрепления для неподвижного закрепления перемещающегося по конвейеру тела (плиты) в неподвижно закрепленное положение на поворотном основании. В конфигурации, где перемещающееся по конвейеру тело пропускается, как описано выше, тем не менее, средство позиционирования и неподвижного закрепления имеет потребность переключать состояние перемещающегося по конвейеру тела, передвинутого с задней стороны, из состояния позиционно неподвижного закрепления в отношении направления назад и вперед в состояние допускающее продвижение вперед. Неподвижно закрепленный стопор, просто принимающий перемещающееся по конвейеру тело в неподвижно закрепленное местоположение, не может быть использован. Соответственно, стоимость для средства позиционирования и неподвижного закрепления становится тоже высокой.
Средство для решения задач
Настоящее изобретение предлагает устройство погружения, допускающее решение описанных выше традиционных задач. Устройство погружения согласно первому аспекту настоящего изобретения, описанного со ссылочными позициями в круглых скобках, использованных в описании вариантов осуществления, описанных ниже для того, чтобы облегчать понимание отношения к вариантами осуществления, включает в себя ванну (1) обработки, в которую погружается изделие (W) для обработки его поверхности, горизонтальный шпиндель (16), пересекающий ванну (1) обработки сверху, поворотное основание (15), поддерживаемое с возможностью вращения вокруг горизонтального шпинделя (16), приводящее средство (21) для вращения поворотного основания (15) в направлении вперед и назад между положением ожидания, в котором основание находится, по существу, горизонтально над ванной (1) обработки, и перевернутым положением, когда основание переворачивается по направлению вперед и вниз из положения ожидания и находится верхней частью вниз, направляющее средство (17а и 17b) перемещающегося тела, предоставленного на поворотном основании (15) с тем, чтобы поддерживать и направлять перемещение перемещающегося по конвейеру тела (2) вдоль направления назад и вперед, ортогонального горизонтальному шпинделю (16), наземную линию (3) перемещения от которой перемещающееся по конвейеру тело (2), на которое изделие (W) погружено и жестко закреплено, может быть переведено на направляющее средство (17а и 17b) перемещающегося тела поворотного основания (15) в положение ожидания, наземную линию (3) перемещения, служащую в качестве и линии подхода и линии отхода перемещающегося по конвейеру тела (2) в отношении поворотного основания и соединенного с направляющим средством (17а или 17b) перемещающегося тела на заднем конце поворотного основания, находящегося в положение ожидания, средство (43) позиционирования и жесткого закрепления для позиционирования перемещающегося по конвейеру тела (2), переведенного с заднего конца поворотного основания (15) на поворотное основание (15) посредством направляющего средства (17а и 17b) перемещающегося средства в неподвижно закрепленное местоположение и жесткое закрепление перемещающегося по конвейеру тела (2) к поворотному основанию (15), подающее средство (26а и 26b) для подачи перемещающегося по конвейеру тела (2) в неподвижно закрепленное местоположение на поворотном основании (15), позиционированного при помощи средства (43) позиционирования и жесткого закрепления, и средство (54а и 54b) управления для переключения средства (43) позиционирования и жесткого закрепления между состоянием отсутствия фиксации и состоянием действия фиксации.
Когда осуществляется вышеописанное настоящее изобретение, особенно по второму аспекту, поворотное основание (15) может поддерживаться в местоположении около его переднего конца, нежели чем в его центральном местоположении направления спереди назад, горизонтальным шпинделем (16), и может быть размещено поддерживающее средство (38) для приема заднего конца поворотного основания (15), находящегося в положении ожидания. В этом случае по третьему аспекту, поворотное основание (15) может состоять из пары левого и правого направленных спереди назад рамных материалов (18а и 18b), направляющее средство перемещающегося тела на поворотном основании (15) может быть образовано из пары левого и правого направляющих рельсов (17а и 17b), которые лежат на направленных спереди назад рамных материалах (18а и 18b), образующих поворотное основание (15), и поддерживающих колес (с 5а по 6b) перемещающегося по конвейеру тела (2), и поддерживающее средство (38) может состоять из пары левого и правого направляющих (39а и 39b) позиционирования, в которые устанавливаются задние концы пары левого и правого направленных спереди назад рамных материалов (18а и 18b) и приемников (40а и 40b) для приема задних концов направленных спереди назад рамных материалов (18а и 18b).
Дополнительно по четвертому аспекту, перемещающееся по конвейеру тело (2) имеет нижнюю часть, оборудованную, по меньшей мере, передними и задними парами горизонтальных направленных слева направо входящих в зацепление пальцев (11а-12b), средство (43) позиционирования и неподвижного закрепления может быть образовано, по меньшей мере, из передних и задних пар элементов (44а-44d), имеющих боковые вогнутые участки (46), в которые горизонтально устанавливаются соответствующие входящие в зацепление пальцы (11а-12b) перемещающегося по конвейеру тела (2), передвинутого на поворотное основание (25), и блокирующей подвижной части (48), переключаемой между состоянием действия фиксации для предотвращения ухода назад перемещающегося по конвейеру тела (2), чьи входящие в зацепление пальцы (11а-12b) устанавливаются внутрь соответствующих боковых вогнутых участков (46) элементов (44а-44d) позиционирования, и состоянием отсутствия фиксации, допускающим уход назад перемещающегося по конвейеру тела (2). В этом случае, по пятому аспекту, блокирующая подвижная часть (48) средства (43) позиционирования и неподвижного закрепления может шарнирно поддерживаться на поворотном основании (15) с тем, чтобы при повороте входить в зацепление и расцепляться с блокируемым элементом (10а или 10b), предоставленным на перемещающемся по конвейеру теле (2), и может быть обеспечена пружиной (53) для удержания этой блокирующей подвижной части (48) в состоянии действия фиксации, находясь в зацеплении с блокируемым элементом (10а или 10b), и в состоянии отсутствия фиксации, находясь расцепленной с блокируемым элементом (10а или 10b). Замечено, что механизм блокировки, имеющий блокирующую подвижную часть (48), может быть предоставлен в качестве левой и правой пары как в вариантах осуществления, описанных ниже, но также может быть предоставлен только либо на левой, либо на правой стороне в зависимости от обстоятельств.
Более того, по шестому аспекту, средство (54а или 54b) управления может состоять из первой управляющей части (50), принудительно поворачивающей блокирующую подвижную часть (48) из состояния отсутствия фиксации в состояние действия фиксации, привода (56) для первой управляющей части (55), второй управляющей части (57), принудительно поворачивающей блокирующую подвижную часть (48) из состояния действия фиксации в состояние отсутствия фиксации, и привода (58) для второй управляющей части (57).
Дополнительно, когда принимается конфигурация, как описано в четвертом аспекте, по седьмому аспекту, блокирующая подвижная часть (63) средства (43) позиционирования и неподвижного закрепления может шарнирно поддерживаться на поворотном основании (15) с тем, чтобы при повороте входить в зацепление или расцепляться с блокируемым элементом (10а или 10b), для перемещающегося по конвейеру тела (2) может быть предоставлена с управляемым участком (63b) и быть обеспечена пружиной (75) для удержания смещением блокирующей подвижной части (63) в состоянии действия фиксации, когда находится в зацеплении с блокируемым элементом (10а или 10b), и средство (64) управления может состоять из позиционно неподвижно закрепленного элемента (82) управления, воздействующего на управляемый участок (63b) блокирующей подвижной части (63), когда поворотное основание (15) возвращается в положение ожидания, и передвигающее блокирующую подвижную часть (63) в состояние отсутствия фиксации против силы смещения пружины (75), в котором блокирующая подвижная часть (63) находится вне траектории движения блокируемого элемента (10а или 10b).
Результаты изобретения
Согласно конфигурации по первому аспекту настоящего изобретения, наземная линия перемещения, которая соединяется с задним концом поворотного основания, находящегося в положении ожидания, служит как линия подхода и как линия отхода перемещающегося по конвейеру тела в отношении поворотного основания, и перемещающееся по конвейеру тело, нагруженное изделием, чье погружение в ванну обработки выполняется вращением поворотной базы, перемещается с и на поворотное основание, находящееся в положении ожидания, и возвращается на исходную наземную линию перемещения. Поскольку на переднем конце основания не предоставлена наземная линия перемещения для перемещающегося по конвейеру тела, покидающего основание, не существует необходимости сложной конфигурации, в которой направляющим рельсам или роликовым конвейерам, образующим возвратные наземные линии перемещения, позволяется уходить в обе боковые стороны как в традиционном способе, даже если поворотное основание выполнено шарнирно с поддержкой горизонтального шпинделя в местоположении, где его задний конец значительно выступает вперед, когда вращается в направлении вперед и вниз из положения ожидания, т.е. в местоположении около его переднего конца. Следовательно, конфигурация всего устройства может быть просто воспроизведена и выполнена без больших затрат.
Дополнительно, неподвижно закрепленная стопорная структура для приема перемещающегося по конвейеру тела, передвинутого на поворотное основание, находящегося в положении ожидания, в неподвижно закрепленное местоположение, может быть включена в средство позиционирования и неподвижного закрепления, которое является необходимым для поворотного основания. Следовательно, конфигурация средства позиционирования и неподвижного закрепления становится простой и может быть тоже выполнена недорого в этом отношении.
С другой стороны, согласно конфигурации по второму аспекту, длина направления спереди назад ванны обработки может быть сокращена в сравнении со случаем, где поворотное основание шарнирно поддерживается горизонтальным шпинделем в центральном местоположении направления спереди назад поворотного основания (центральном местоположении в направлении спереди назад изделия, как например, кузова автомобиля на перемещающемся по конвейеру теле, позиционированном и неподвижно закрепленном на поворотном основании), как описано выше. В то же время поворотное основание может поддерживаться в положении ожидания надежно и стабильно только поддерживающим средством для приема заднего конца поворотного основания. В этом случае конфигурация по третьему аспекту может способствовать тому, чтобы приемник поддерживающего средства эффективно принимал нагрузку перемещающегося по конвейеру тела с нагруженным изделием, которое воздействует на поворотное основание, и также мог надежно предотвращать боковое смещение поворотного основания, вследствие чего перемещающееся по конвейеру тело может безопасно передвигаться на поворотное основание и покидать его.
Согласно конфигурации по четвертому аспекту, входящие в зацепление пальцы предоставленные, по меньшей мере, в двух местах спереди и сзади поворотного основания и жестко закрепленные элементы позиционирования, соответствующие этим входящим в зацепление пальцам, предоставленные на поворотном основании, могут надежно выполнять обе функции остановки перемещающегося по конвейеру тела, передвинутого на поворотное основание в местоположение надежного закрепления, и предотвращения сбрасывания перемещающегося по конвейеру тела, когда поворотное основание переворачивается верхней стороной вниз. Затем средство позиционирования и неподвижного закрепления для позиционирования и неподвижного закрепления перемещающегося по конвейеру тела в местоположении неподвижного закрепления на поворотном основании может быть сконфигурировано при помощи исключительно простой структуры добавления в качестве меры безопасности блокирующей подвижной части, которая предотвращает уход назад перемещающегося по конвейеру тела. В этом случае уход назад перемещающегося по конвейеру тела на поворотном основании может быть надежно предотвращен при помощи блокирующей подвижной части согласно конфигурации по пятому аспекту. Поскольку форма и местоположение поворотной поддержки блокирующей подвижной части предполагается так, что блокирующая подвижная часть не двигается в направлении отсутствия фиксации под влиянием действующей силы от заблокированного элемента перемещающегося по конвейеру тела, когда сила ухода действует на перемещающееся по конвейеру тело на поворотном основании, надежность может быть улучшена простой структурой только с добавлением пружины, допускающей удерживание блокирующей подвижной части в состоянии действия фиксации и в состоянии отсутствия фиксации.
Более того, согласно конфигурации по шестому аспекту, блокирующая подвижная часть, удерживаемая в состоянии действия фиксации или в состоянии отсутствия фиксации усилием пружины, как описано выше, может быть надежно переключена в противоположное состояние при помощи двух управляющих частей и их приводом. Дополнительно, согласно конфигурации по седьмому аспекту, привод, такой как цилиндрический блок в качестве средства для переключения блокирующей подвижной детали между состоянием активной блокировки и состоянием снятия блокировки является излишним, а между состоянием действия блокировки и состоянием отсутствия блокировки блокирующую подвижную часть могут переключать позиционно неподвижный элемент управления и пружина. Таким образом, устройство настоящего изобретения может быть недорогим и может быть осуществлено простым образом.
Краткое описание чертежей
Фиг. 1 - вид сбоку частично в продольном разрезе всего устройства;
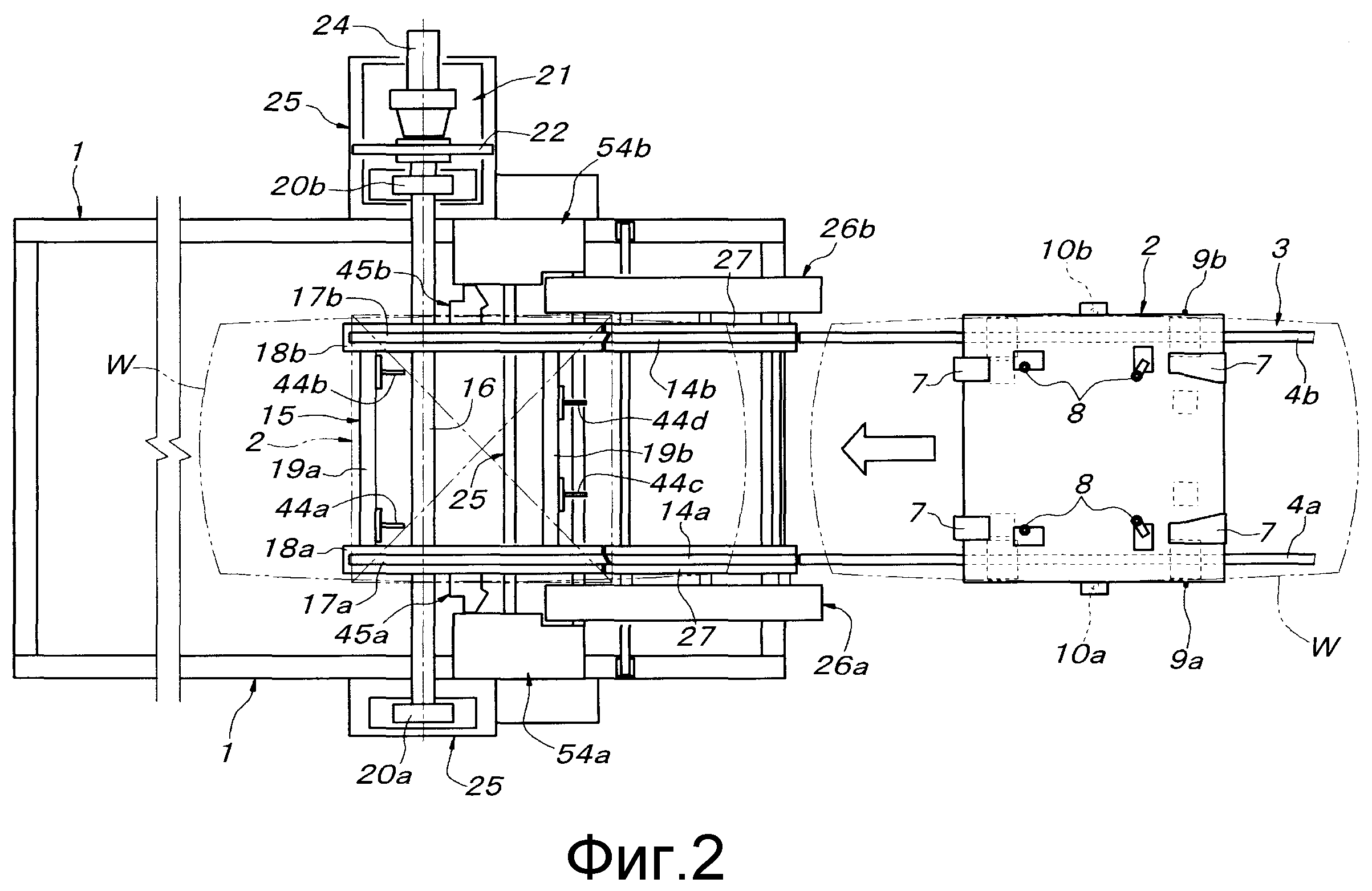
Фиг. 2 - вид сверху всего устройства;
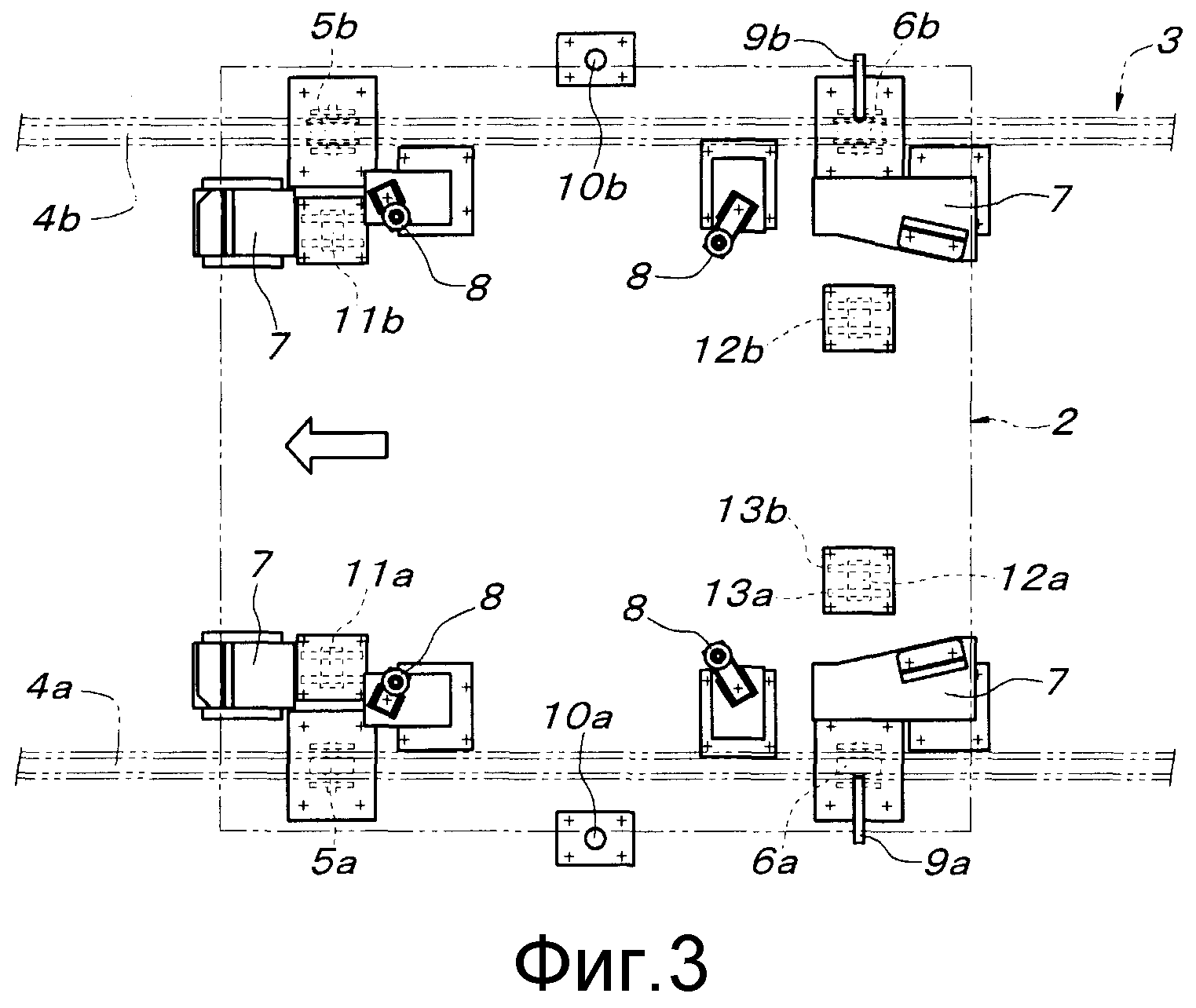
Фиг. 3 - вид сверху, поясняющий конфигурацию перемещающегося по конвейеру тела за исключением перемещающегося главного корпуса;
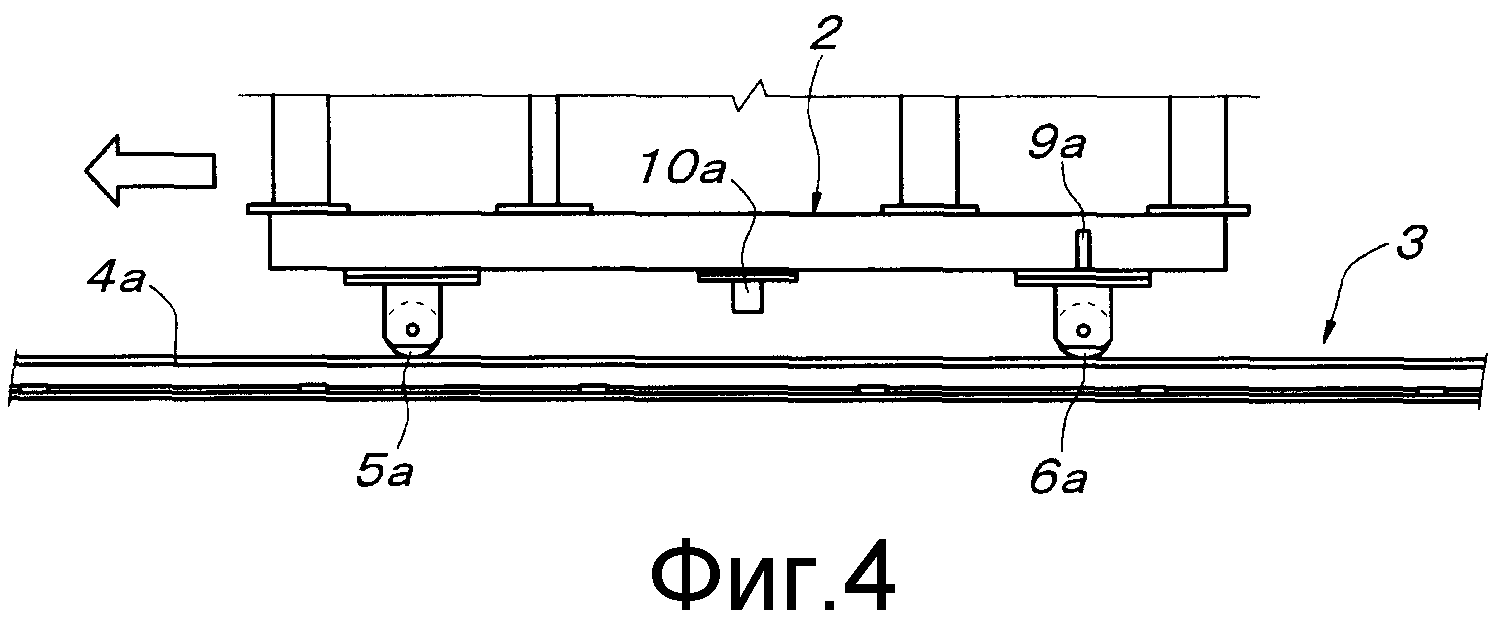
Фиг. 4 - вид сбоку главной части перемещающегося по конвейеру тела;
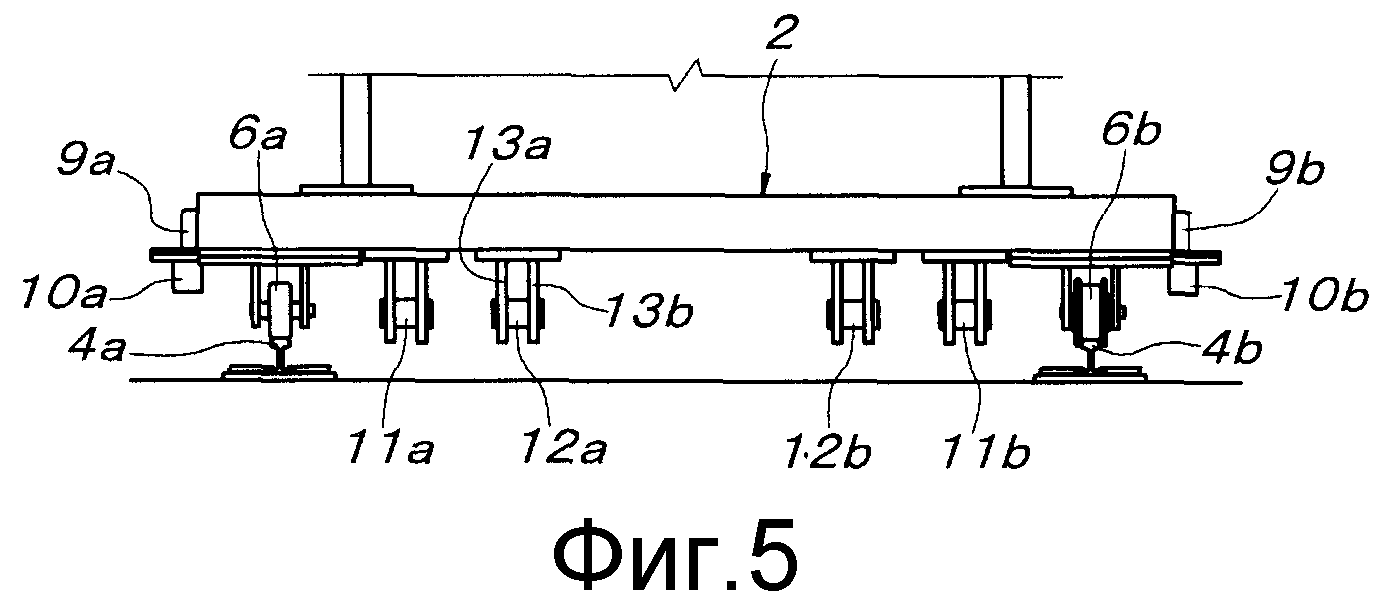
Фиг. 5 - вид сзади главной части перемещающегося по конвейеру тела;
Фиг. 6 - вид сзади, показывающий поворотное основание в исходном местоположении и соответствующее периферийное средство;
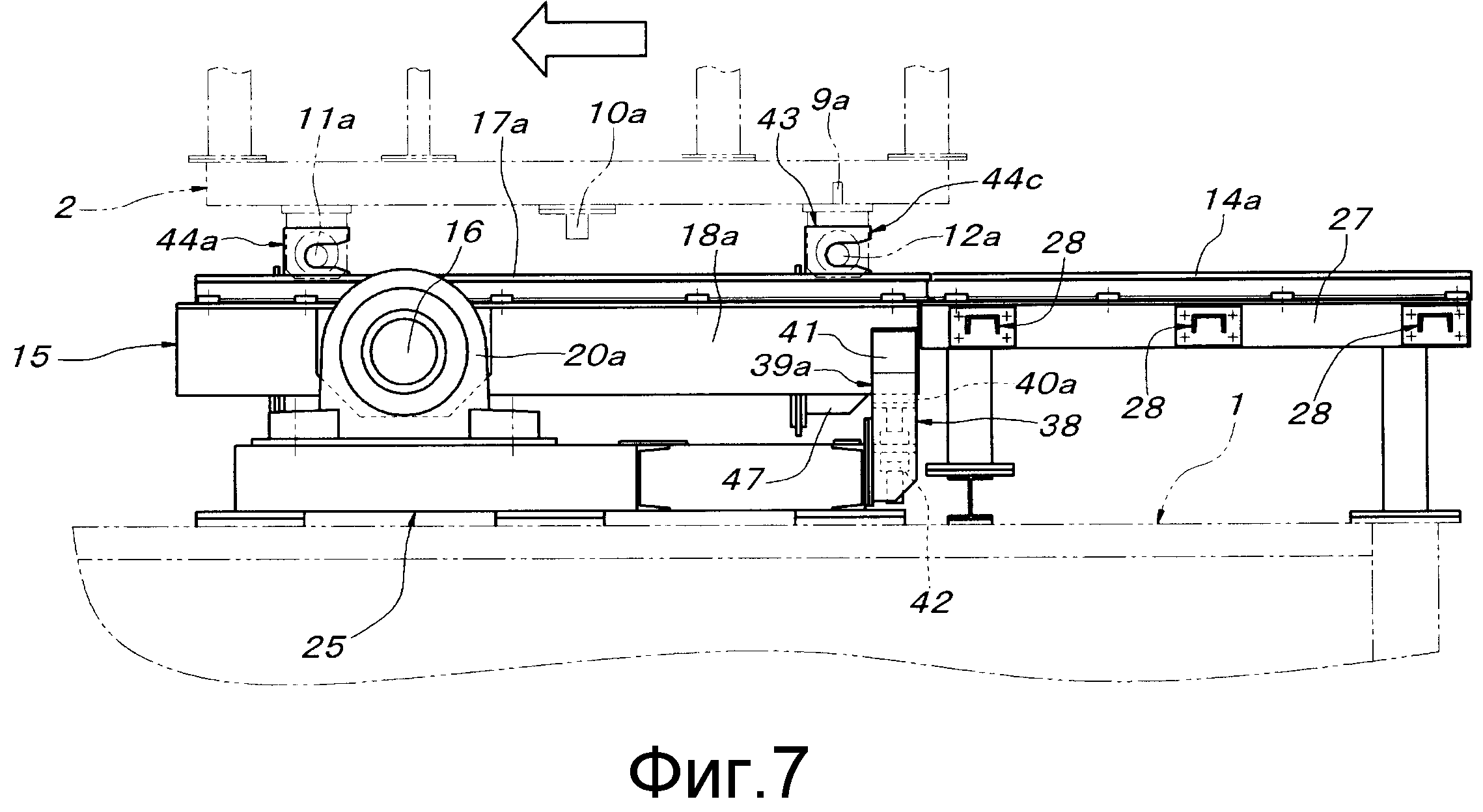
Фиг. 7 - вид сбоку, показывающий главную часть поворотного основания в его исходном местоположении;
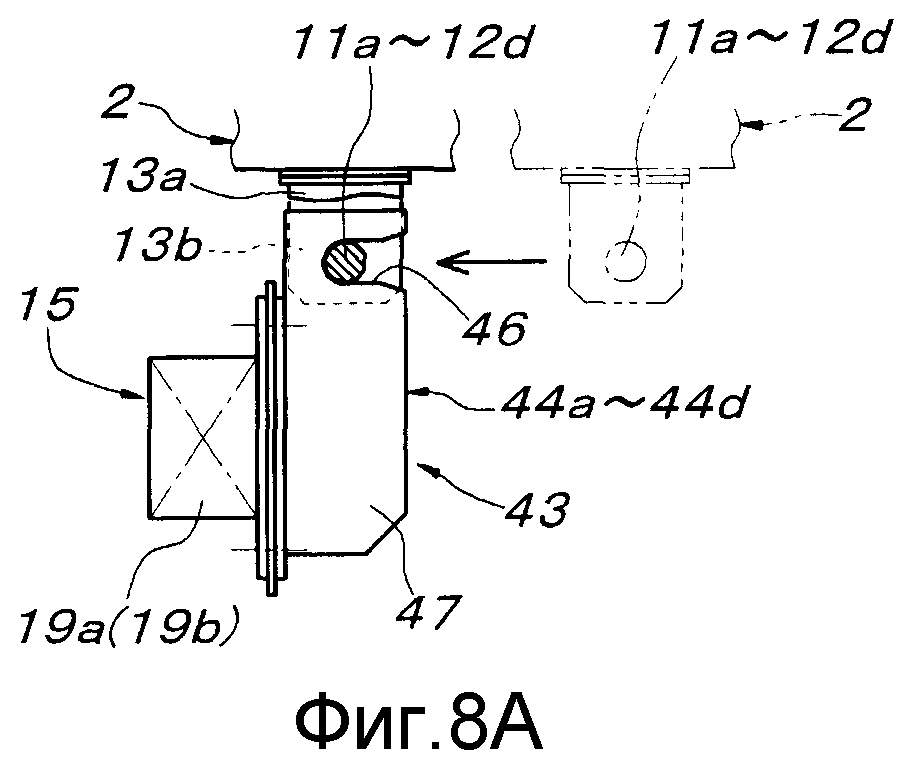
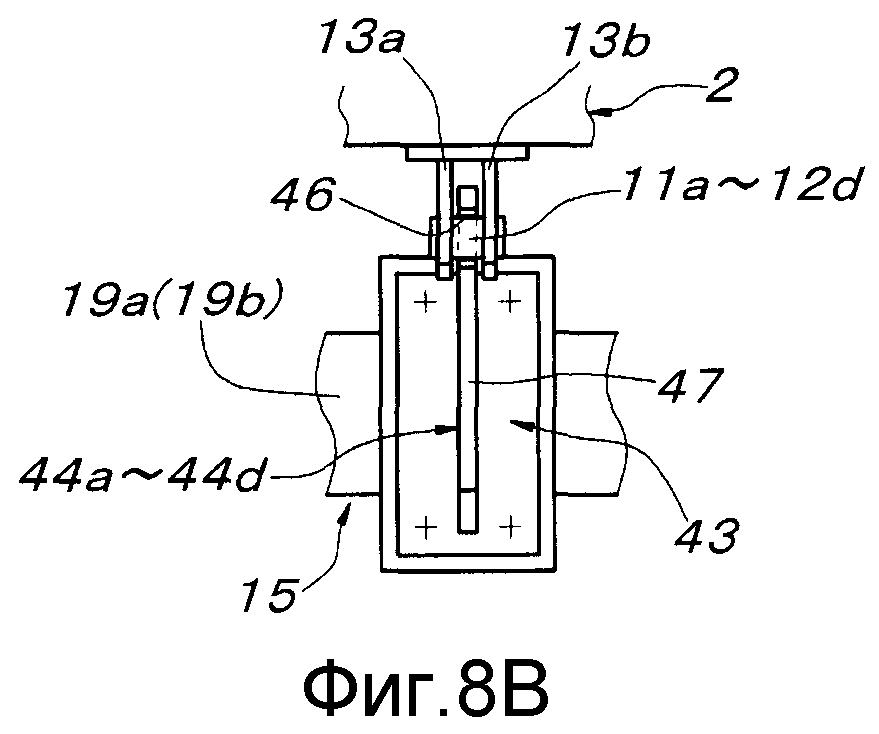
Фиг. 8А - вид сбоку с частичным вырезом, показывающий одно из средств позиционирования перемещающегося по конвейеру тела на поворотном основании в работающем состоянии, а фиг. 8B - его вид сзади;
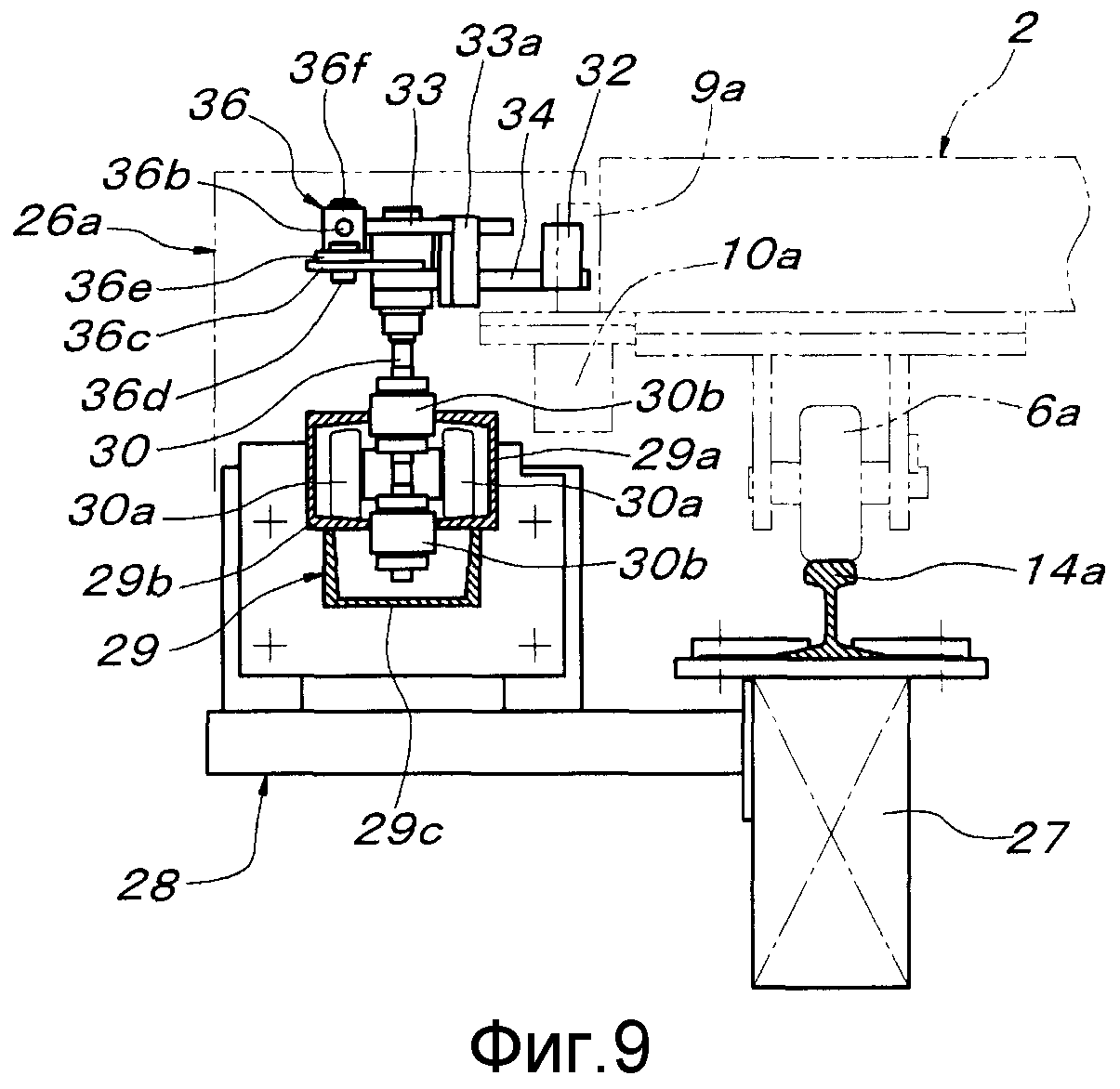
Фиг. 9 - продольный вид сзади в разрезе, показывающий подающее средство на одной стороне;
Фиг. 10А - вид сверху, показывающий подающее средство на одной стороне, а фиг. 10B - его вид сбоку;
Фиг. 11 - увеличенный вид сверху, показывающий главную часть фиг. 10А;
Фиг. 12 - вид сверху, показывающий средство блокировки перемещающегося по конвейеру тела и средство управления для средства блокировки на одной стороне поворотного основания;
Фиг. 13 - частичный вид сзади вышеупомянутого;
Фиг. 14 - вид сверху, показывающий управляемое состояние вышеупомянутого;
Фиг. 15 - вид сбоку, показывающий другой вариант осуществления блокирующей подвижной части средства позиционирования и неподвижного закрепления, которое неподвижно закрепляет перемещающееся по конвейеру тело на поворотном основании, и средство управления для блокирующей подвижной части;
Фиг. 16 - вид сзади главной части фиг. 15;
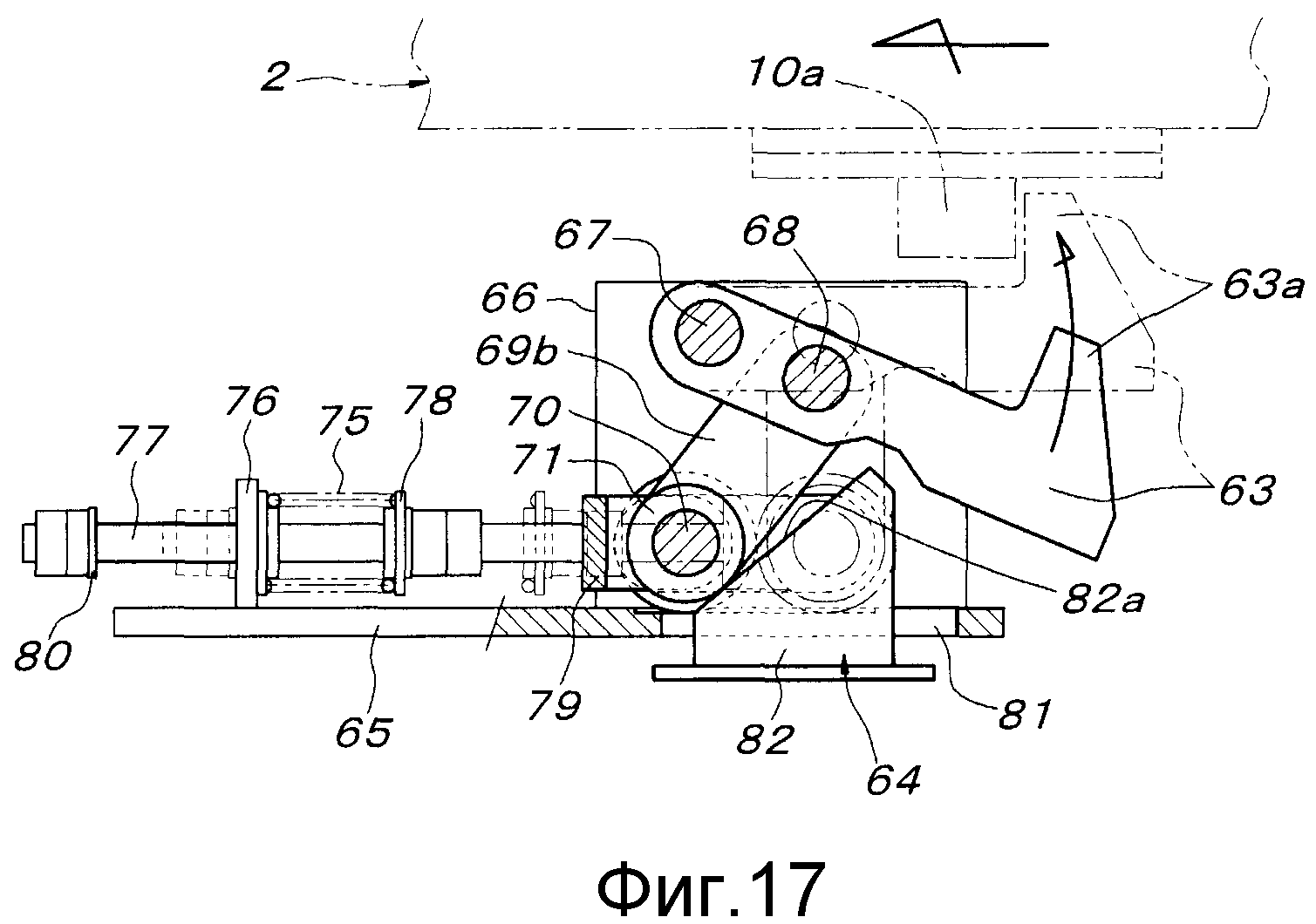
Фиг. 17 - вид сбоку увеличенного продольного разреза главной части фиг. 15;
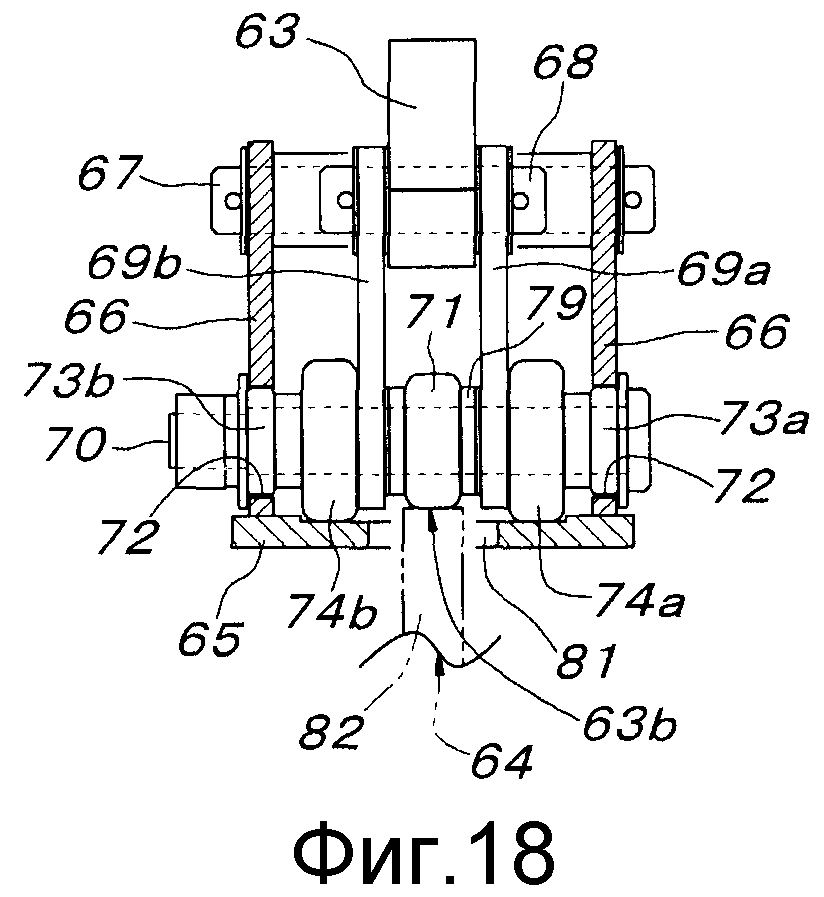
Фиг. 18 - вид сзади продольного разреза блокирующей подвижной части, показанной на фиг. 15 в состоянии действия блокировки;
Фиг. 19 - вид сверху блокирующей подвижной части, показанной на фиг. 15 в состоянии действия блокировки; и
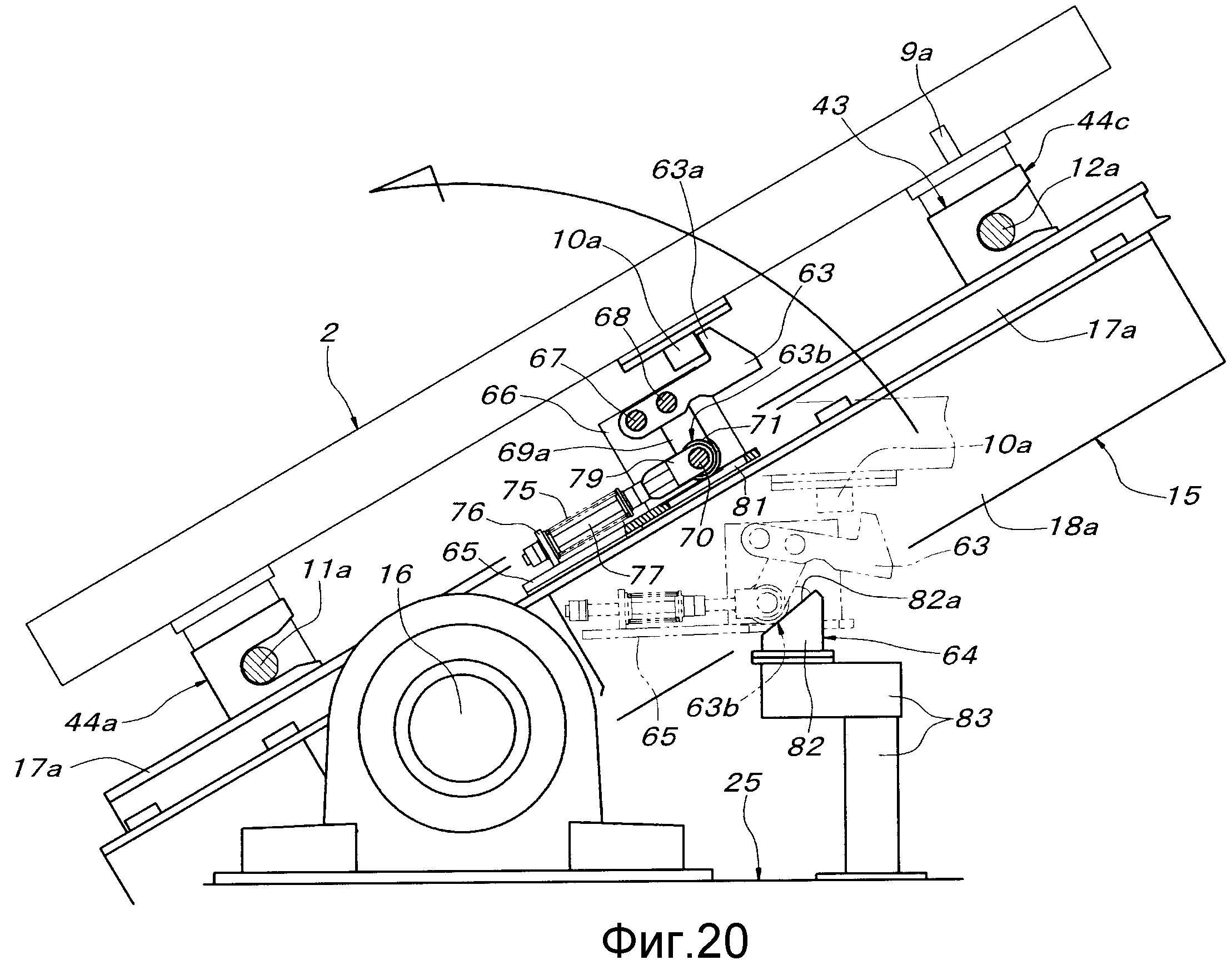
Фиг. 20 - вид сбоку частичного продольного разреза, объясняющий управление, где блокирующая подвижная часть, показанная на фиг. 15, меняет состояние из состояния отсутствия блокировки в состояние действия блокировки.
Описание предпочтительных вариантов осуществления изобретения
На фиг. 1 и фиг. 2 ссылочной позицией 1 обозначена ванна обработки прямоугольной формы на виде сверху, расположенная на конце наземной линии 3 перемещения перемещающегося по конвейеру тела 2 в таком направлении, что его более длинные стороны являются параллельными линии 3 перемещения. Наземная линия 3 перемещения перемещающегося по конвейеру тела 2 состоит из пары левого и правого направляющих рельсов 4а и 4b, а перемещающееся по конвейеру тело 2 включает в себя пару передних и задних колес 5а и 6а без реборд, катящихся по одному из направляющих рельсов 4а, и пару передних и задних колес 5b и 6b с ребордами, катящихся по другому направляющему рельсу 4b, обеспеченными ребордами, размещающими между собой направляющий рельс 4b, как показано на фиг. 3-5. Перемещающееся по конвейеру тело 2 имеет верхнюю поверхность, обеспеченную множеством опор 7 изделия для поддержки изделия (кузова автомобиля) W, и множество фиксаторов 8 изделия для неподвижного закрепления изделия W с перемещающимся по конвейеру телом 2. Перемещающееся по конвейеру тело 2 имеет по обеим боковым сторонам пассивные пластины 9a и 9b, выступающие вбок из мест в окрестности заднего конца его направленной спереди назад длины и блокируемые элементы 10а и 10b, расположенные, по существу, в центре направленной спереди назад длины. Дополнительно, перемещающееся по конвейеру тело 2 имеет нижнюю часть, обеспеченную парой левых и правых входящих в зацепление пальцев 11а и 11b, с тем чтобы изнутри примыкать к передней паре левого и правого колес 5а и 5b, и обеспеченную парой левых и правых входящих в зацепление пальцев 12a и 12b в местах внутри задней пары левого и правого колес 6а и 6b, парой пальцев, находящейся дальше внутри, нежели чем непосредственно за передними парными входящими в зацепление пальцами 11а и 11b. Эти входящие в зацепление пальцы с 11а по 12b все установлены в горизонтальном направлении слева направо между парой левой и правой поддерживающих пластин 13а и 13b, соответственно.
Пара левого и правого неподвижно закрепленных направляющих рельсов 14а и 14b, соединенных с направляющими рельсами 4а и 4b, лежат выше ванны 1 обработки в качестве окончания наземной линии 3 перемещения. Поворотное основание 15 предоставлено над ванной обработки 1 так, чтобы примыкать к свободным концам направляющих рельсов 14а и 14b. Поворотное основание 15 имеет направленную спереди назад длину, по существу, равную полной длине направления перемещения перемещающегося по конвейеру тела 2. Поворотное основание 15 поддерживается в местоположении около переднего конца, противоположного заднему концу, где расположены неподвижно закрепленные направляющие рельсы 14а и 14b, нежели чем в центре направления спереди назад с тем, чтобы вращаться в направлении вперед и назад в пределах определенного диапазона углов при помощи шпинделя горизонтального вращения 16, проходящего в направлении слева направо над ванной 1 обработки. Когда поворотное основание 15 находится в горизонтальном положении ожидания, его передний конец расположен, по существу, в центре продольного направления ванны 1 обработки, как показано сплошной линией на фиг. 1 и фиг. 2. Пара левого и правого направляющих рельсов 17а и 17b, соединенных со свободными концами неподвижно закрепленных направляющих рельсов 14а и 14b, в тот момент лежат на поворотном основании 15.
Поворотное основание 15 имеет форму прямоугольной рамы, состоящей из пары левого и правого направленных спереди назад рамных материалов 18а и 18b и пары переднего и заднего направленных слева направо рамных материалов 19а и 19b, соединяющих соответствующие оба конца направленных спереди назад рамных материалов 18а и 18b. Направляющие рельсы 17а и 17b лежат на паре левого и правого направленных спереди назад рамных материалов 18а и 18b. Шпиндель 16 горизонтального вращения пронизывает пару левого и правого направленных спереди назад рамных материалов 18а и 18b поворотного основания 15, которое жестко закреплено и интегрировано с шпинделем 16 горизонтального вращения в направленных спереди назад рамных материалах 18а и 18b. Шпиндель 16 горизонтального вращения имеет концы, причем оба конца удерживаются с возможностью вращения подшипниками 20а и 20b, расположенными за пределами обеих боковых сторон ванны 1 обработки, а приводящее средство 21 входит в зацепление и соединяется с одним из концов. Приводящее средство 21 состоит из прямозубного колеса 22 большего диаметра, прикрепленного к одному концу шпинделя 16 горизонтального вращения, прямозубного колеса 23 небольшого диаметра, зацепленного с прямозубным колесом 22 большого диаметра, и снаряженного редуктором скорости двигателя 24, имеющего выводной вал, к которому прикреплено прямозубное колесо 23 небольшого диаметра. Неподвижно закрепленная станина 25 портальной формы предоставлена на неподвижной опоре таким образом, чтобы проходить поверх ванны 1 обработки, как показано на фиг. 6 и фиг. 7. Подшипники 20а и 20b и двигатель 24 удерживаются неподвижно закрепленной станиной 25, а неподвижно закрепленные направляющие рельсы 14а и 14b непосредственно поддерживаются на ванне 1 обработки.
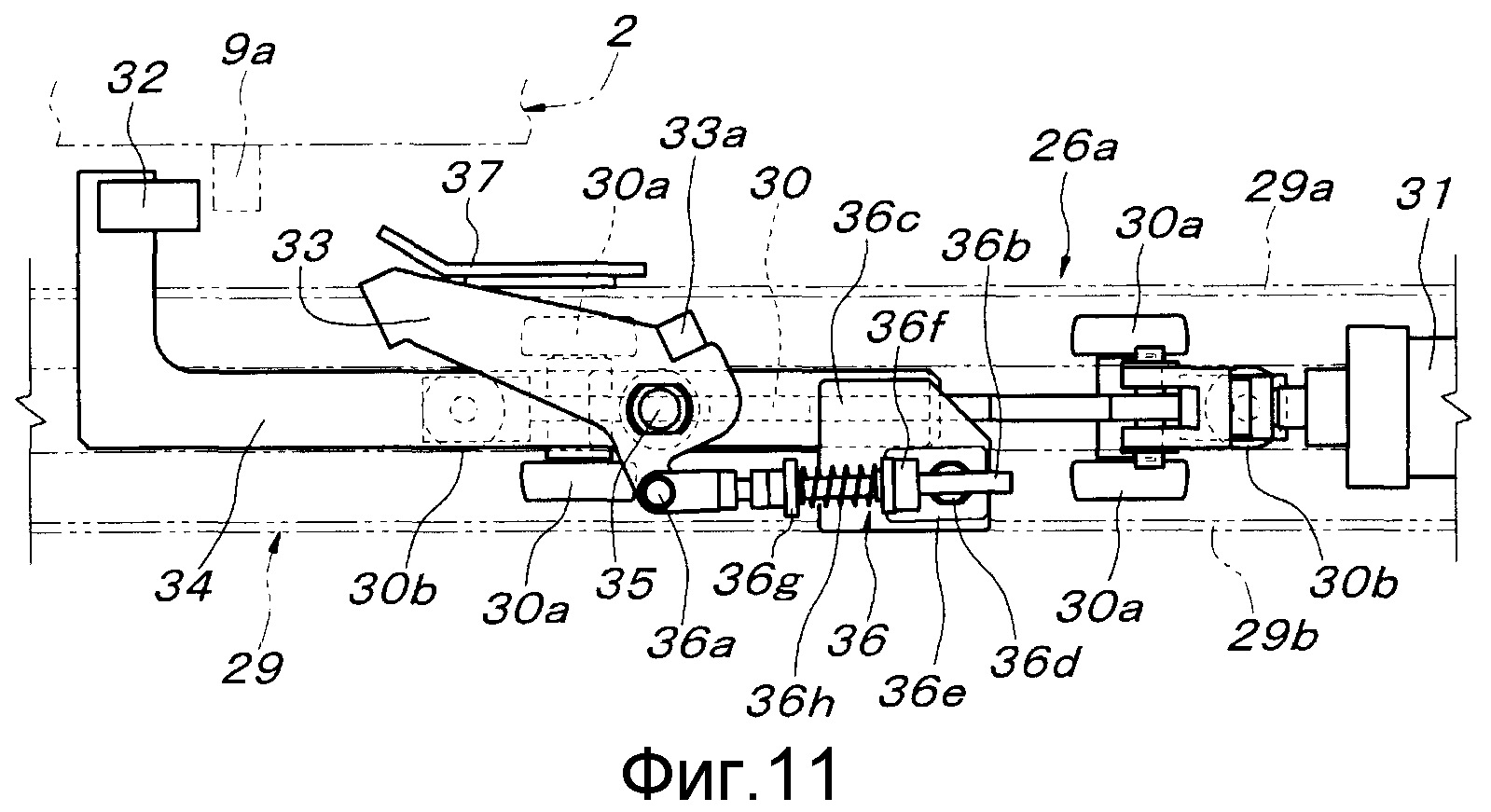
Как показано на фиг. 2, пара левого и правого подающих средств 26а и 26b размещены так, чтобы позиционироваться за пределами пары левого и правого неподвижных направляющих рельсов 14а и 14b. Подающие средства 26а и 26b имеют двусторонне симметричную структуру, которая будет описана со ссылкой на фиг. 9-11, показывающие одно подающее средство 26а. Каждое из подающих средств 26а и 26b поддерживается посредством поддерживающей структуры 28 на направленном спереди назад рамном материале 27, поддерживающем неподвижный направляющий рельс 14а или 14b. Подающее средство 26a или 26b состоит из блока 29 направленного спереди назад направляющего рельса, параллельного неподвижно закрепленному направленному рельсу 14а или 14b, подвижного тела 30, направляемого с поддержкой по блоку 29 направляющего рельса, так чтобы быть подвижным в направлении назад и вперед, цилиндрического блока 31, соответственно приводящего подвижное тело 30, приемника 32 пассивной пластины, предоставленного на подвижном теле 30, и подвижной толкающей детали 33.
Блок 29 направленного рельса состоит из пары левого и правого взаимно направленных рельсов 29а и 29b U-формы и швеллера 29с, объединяющего рельсы 29а и 29b U-формы, находящегося ниже рельсов 29а и 29b U-формы. Подвижное тело 30 направляется с поддержкой по блоку 29 направляющего рельса с тем, чтобы быть подвижным в направлении назад и вперед передними и задними парами левого и правого поддерживающих роликов 30а, установленных внутри взаимно направленных рельсов 29а и 29b U-формы, и самовращающимися вокруг горизонтальной оси, и передними и задними парами верхнего и нижнего роликов 30b, действующих против бокового сноса, установленных между взаимно направленными рельсами 29а и 29b U-формы, и самовращающимися вокруг вертикальной оси. Приемник 32 пассивной пластины неподвижно закреплен на задней стороне на дальнем конце опорной пластины 34 L-формы, которая неподвижно закреплена у верхнего конца подвижного тела 30 и продолжается вперед в горизонтальном направлении, а также имеет дальний конец, изогнутый внутрь под прямым углом. Подвижная толкающая деталь 33 шарнирно поддерживается над ближним участком опорной пластины 34 L-формы так, чтобы быть способной к вращению вокруг вертикального шпинделя 35.
Подвижная толкающая деталь 33 может вращаться вокруг вертикального шпинделя 35 между положением подачи, причем ее дальний конец выступает в пределах траектории движения пассивной пластины 9a или 9b перемещающегося по конвейеру тела 2, как показано мнимой линией на фиг. 10, и положением отхода для того, чтобы отойти за пределы траектории движения пассивной пластины 9а или 9b, как показано сплошной линией на фиг. 10 и фиг. 11. Подвижная толкающая деталь 33 смещается в положение подачи средством 36 смещения. Удлиненный элемент 33а, прикрепленный к подвижной толкающей детали 33, упирается концом в боковую поверхность опорной пластины 34 L-формы, посредством чего подвижная толкающая деталь 33 удерживается в положении подачи. Средство 36 смещения состоит из стрежня 36b, шарнирно поддерживаемого и соединенного с подвижной толкающей деталью 33 вертикальным пальцем 36а, шарнирной пластины 36е, шарнирно поддерживаемой на несущей пластине 36с, прикрепленной к опорной пластине 34 L-формы с тем, чтобы вращаться вокруг вертикального шпинделя 36d, поддерживающего элемента 36f стержня, неподвижно закрепленного на шарнирной пластине 36e и пронизанного стрежнем 36b, и спиралеобразной пружины 36h сжатия, свободно установленной на стержень 36b между элементом 36f, поддерживающим стержень, и гнездом пружины 36g, прикрепленным к стержню 36b. Когда подвижное тело 36 выполнено для втягивания в окрестность местоположения предельного рубежа втягивания цилиндрическим блоком 31, как показано на фиг. 10А и фиг. 11, искривленная пластина 37 переключает подвижную толкающую деталь 33, удерживаемую в положении подачи при помощи силы смещения средства 36 смещения, к положению отхода против силы смещения вместе с перемещением к местоположению предельного рубежа втягивания. Эта искривленная пластина 37 закрепляется за пределами одного из взаимно направленных рельсов 29а U-формы блока 29 направляющих рельсов. Когда подвижное тело 30 находится в исходном местоположении предельного рубежа втягивания, подвижная толкающая деталь 33 удерживается в положении отхода искривленной пластиной 37.
Поддерживающее средство 38 для поддержки поворотного основания 15 в горизонтальном положении ожидания размещено на жестко закрепленной станине 25. Поворотное основание 15 поддерживается с возможностью вращения при помощи шпинделя 16 горизонтального вращения в положении около переднего конца, противоположного заднему концу, где расположены закрепленные неподвижно направляющие рельсы 14a и 14b, как описано выше. Следовательно, поддерживающее средство 38 поддерживает задний конец поворотного основания 15 в горизонтальном положении ожидания, а более точно, задние концы пары левого и правого направленных спереди назад рамных материалов 27, которые поддерживают направляющие рельсы 17а и 17b, как показано на фиг. 6 и фиг. 7. Поддерживающее средство 38 прикреплено к направленному слева направо рамному материалу 25а неподвижно закрепленной станины 25. Более точно, поддерживающее средство 38 состоит из пары левого и правого направляющих 39а и 39b позиционирования, в которые устанавливаются задние концы пары левого и правого направленных спереди назад рамных материалов 27, и приемников 40а и 40b, поддерживающих задние концы направленных спереди назад рамных материалов в пределах направляющих 39а и 39 позиционирования соответственно. Направляющий 39а или 39b позиционирования состоит из пары левой и правой направляющих пластин 41, чьи верхние концы наклонены раструбным образом. Приемник 40а и 40b сконфигурирован так, что его высота может корректироваться винтовым механизмом 42.
На поворотном основании 15 представлено средство 43 позиционирования и неподвижного закрепления для позиционирования и неподвижного закрепления перемещающегося по конвейеру тела 2, переведенного с неподвижно закрепленных направляющих рельсов 14а и 14b на направляющие рельсы 17а и 17b поворотного основания 15, и передвинутого вперед. Средство 43 позиционирования и неподвижного закрепления состоит из четырех элементов 44a-44d позиционирования, как показано на фиг. 2, и пары правого и левого механизмов 45а и 45b блокировки, как показано на фиг. 2. Элементы 44a-44d позиционирования состоят из вертикальных пластин 47, образованных с вогнутыми участками 46 при помощи вырезания в задних поверхностях соответственно, а четыре входящих в зацепление пальцев с 11а по 12b внизу перемещающегося по конвейеру тела 2 в горизонтальном направлении устанавливаются в вогнутые участки 46 наряду с перемещающимся по конвейеру телом 2, как показано на фиг. 6-8. Элементы 44a-44d позиционирования прикрепляются к задним сторонам пары передних и задних направленных слева направо рамных материалов 19а и 19b, образующих поворотное основание 15.
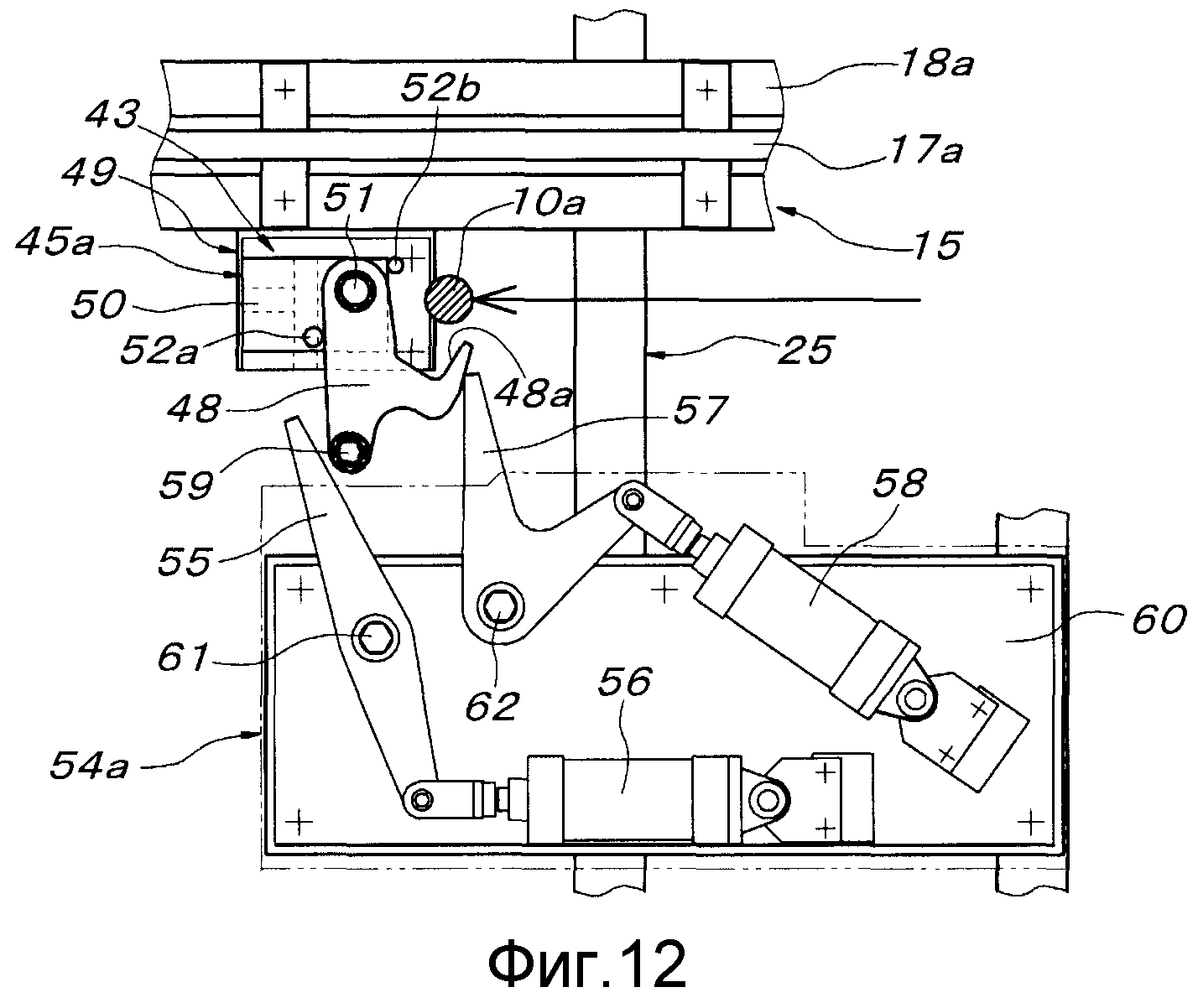
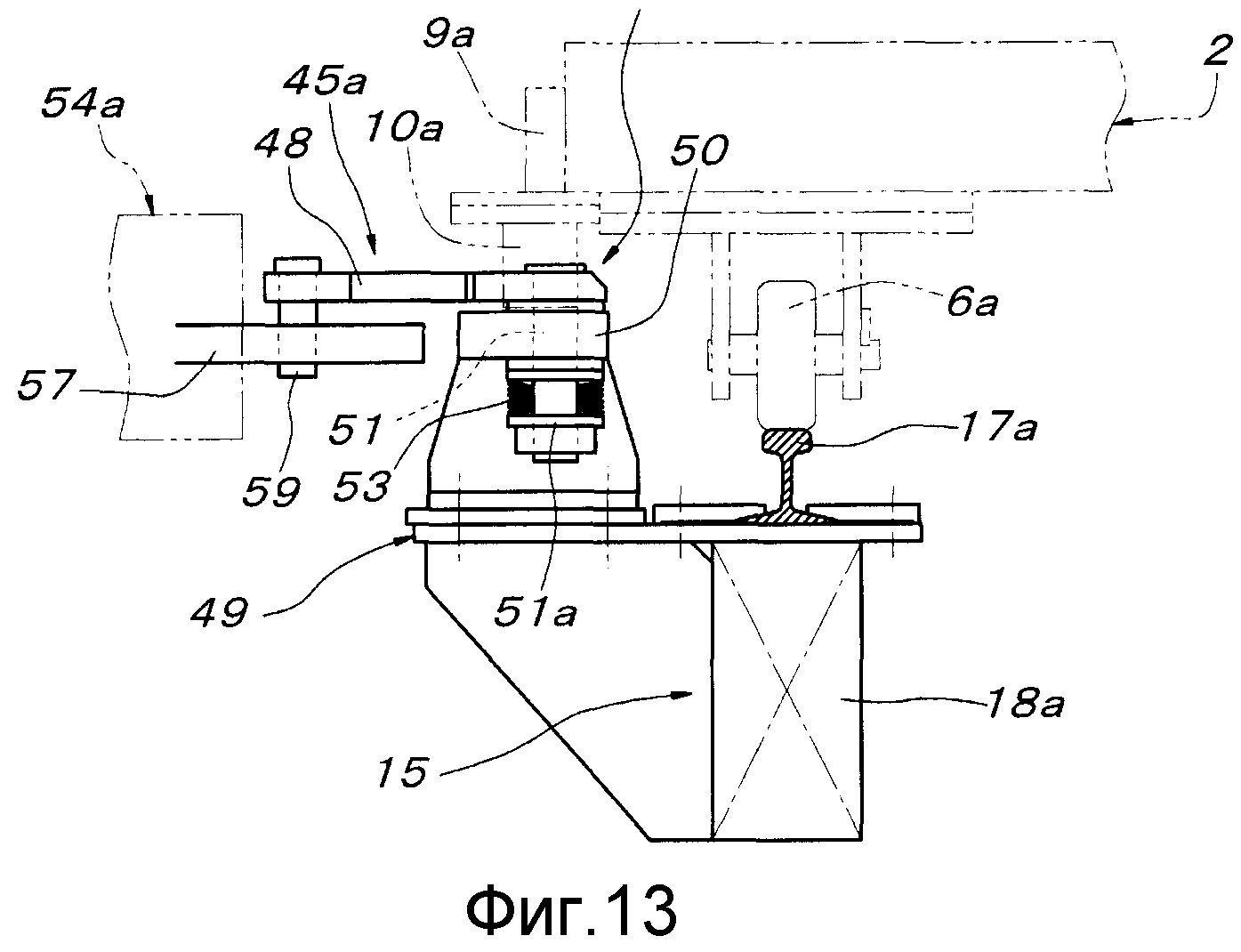
Механизмы 45а и 45b блокировки предотвращают уход перемещающегося по конвейеру тела 2 из неподвижно закрепленного местоположения при помощи блокируемых элементов 10а и 10b, состоящих из пары левого и правого вертикальных пальцев, прикрепленных к обеим боковым сторонам перемещающегося по конвейеру тела 2. Как показано на фиг. 12-14, механизмы 45а и 45b блокировки включают в себя соответствующие блокирующие подвижные части 48. Блокирующая подвижная часть 48 шарнирно поддерживается с возможностью вращения вокруг вертикального шпинделя 51 на горизонтальной несущей пластине 50, прикрепленной снаружи каждого из пары левого и правого направленного спереди назад рамного материала 18а и 18b, образующих поворотное основание 15 посредством поддерживающей структуры 49. Блокирующая подвижная часть 48 может вращательно переключаться между состоянием отсутствия фиксации, как показано на фиг. 12, и состоянием действия фиксации, как показано на фиг. 14, между стопорными пальцами 52а и 52b, жестко закрепленными на несущей пластине 50. При вращении вокруг вертикального шпинделя 51 множеством тарельчатых пружин 53, шарнирно установленных на вертикальный шпиндель 51 между несущей пластиной 50 и гнездом пружины 51а в нижнем конце вертикального шпинделя 51, придается большое сопротивление трению для смещения вертикального шпинделя 51 вниз. Блокирующая подвижная часть 48 удерживается в состоянии отсутствия фиксации и состоянии действия фиксации при помощи сопротивления трению. В момент нахождения в состоянии действия фиксации, как показано на фиг. 14, блокирующая подвижная часть 48 действует в форме крючка так, что вертикальный шпиндель 51 перемещается в направлении перемещения перемещающегося по конвейеру тела 2 относительно блокируемого элемента 10а или 10b перемещающегося по конвейеру тела 2, которые расположены внутри блокирующей подвижной части 48 и так, что внутренняя поверхность 48а, примыкающая к задней стороне блокируемого элемента 10а или 10b, становится перпендикулярной направлению перемещения перемещающегося по конвейеру тела 2. Таким образом, блокирующая подвижная часть 48 не вращается в направлении состояния отсутствия фиксации, как показано на фиг. 12, из-за силы воздействия, которая действует на блокирующую подвижную часть 48 от блокируемого элемента 10а или 10b, когда блокирующая подвижная часть 48 находится в состоянии действия фиксации, как показано на фиг. 14, а перемещающееся по конвейеру тело 2 пытается высвободиться.
Средство 54а и 54b управления для блокирующих подвижных частей 48 механизмов 45а и 45b блокировки на обеих боковых сторонах поворотного основания 15 предоставлены на неподвижно закрепленной станине 25, которая поддерживает поворотное основание 15 в горизонтальном положении ожидания, как показано на фиг. 2. Средство 54а или 54b управления состоит из первой управляющей части 55, принудительно поворачивающей блокирующую подвижную часть 48 из состояния отсутствия фиксации в состояние действия фиксации, цилиндрического блока 56, служащего в качестве привода для первой управляющей части, второй управляющей части 57, принудительно поворачивающей блокирующую подвижную часть 48 из состояния действия фиксации в состояние отсутствия фиксации, и цилиндрического блока 58, служащего в качестве привода для второй управляющей части 57. Управляемый палец 59, выступающий вертикально вниз с тем, чтобы постоянно быть размещенным за пределами несущей пластины 50 и ее поддерживающей структуры 49, предоставлен для блокирующей подвижной части 48. Первая управляющая часть 55, шарнирно поддерживаемая на опорной плите 60, поддерживаемой на неподвижно закрепленной станине 25 вертикальным шпинделем 61, толкая, двигает управляемый палец 59 назад на максимальное отклонение спереди назад управляемого пальца 59. Вторая управляющая часть 57, шарнирно поддерживаемая на опорной плите 60 вертикальным шпинделем 62, толкая, передвигает управляемый палец 59 вперед на максимальное отклонение с задней точки вперед управляемого пальца 59. Цилиндрические блоки 56 и 58, приводящие соответствующие управляющие части 55 и 57, размещены между соответствующими управляющими частями 55 и 57 и опорной плитой 60.
Далее будет описываться использование и работа настоящего изобретения. Перемещающееся по конвейеру тело 2, на которое погружается изделие W и неподвижно закрепляется в местоположении неподвижного закрепления при использовании опор 7 изделия и фиксаторов 8 изделия, приводится известным двигательным устройством (не показано), таким как устройство с цепным приводом или колесо фрикционной передачи, которое под давлением приходит в контакт с полосовой пластиной, выступающим образом предоставленной вдоль направления перемещения нижней части перемещающегося по конвейеру тела 2. Перемещающееся по конвейеру тело 2, перемещаемое по направляющим рельсам 4а и 4b наземной линии 3 перемещения по направлению к ванне 1 обработки, переводится с направляющих рельсов 4а и 4b наземной линии 3 перемещения на неподвижно закрепленные рельсы 14а и 14b, расположенные над ванной 1 обработки, и направляется в местоположение передачи на пару левого и правого подающих средств 26а и 26b, расположенных вне обеих сторон неподвижно закрепленных направляющих рельсов 14а и 14b.
Подающие средства 26а и 26b находятся в таком состоянии, что подвижные тела 30 находятся в исходных местоположениях предельного рубежа втягивания, как показано на фиг. 10А и фиг. 11, подвижные толкающие детали 33 переключены в положение отхода при помощи искривленных пластин 37, и только приемники 32 пассивных пластин, расположенные перед подвижными толкающими деталями 33, выступают в пределах траекторий движения пассивных пластин 9а и 9и перемещающегося по конвейеру тела 2. Перемещающееся по конвейеру тело 2, отправленное на неподвижно закрепленные направляющие рельсы 14a и 14b, как описано выше, останавливается, когда его пассивные пластины 9а и 9b проходят подвижные толкающие детали 33, находящиеся в положении отхода, и достигают местоположения сразу перед приемниками 32 пассивных пластин. Поворотное основание 15 в этот момент находится в горизонтальном положении ожидания, как показано сплошной линией на фиг. 1, а задний конец его поддерживается поддерживающим средством 38, как показано на фиг. 6 и фиг. 7.
Как только перемещающееся по конвейеру тело 2 отправляется на предопределенное местоположение, как описано выше, активируется пара из левого и правого подающих средств 26а и 26b. То есть подвижные тела 30 передвигаются вперед от исходных местоположений цилиндрическими блоками 31. В начале этого движения вперед подвижные толкающие детали 33 уходят вперед из-под искривленных пластин 37 и поворачиваются вокруг вертикальных шпинделей 35 при помощи спиральных пружин 36h сжатия средства 36 смещения, а удлиненные элементы 33а переключаются в положение подачи, примыкания к боковой поверхности опорной пластины L-формы. Как результат, пассивные пластины 9а и 9b перемещающегося по конвейеру тела 2, остановленного в предопределенном местоположении, помещаются между подвижными толкающими деталями 33, находящимися в положении подачи, и приемниками 32 пассивных пластин перед ними. Подвижные толкающие элементы 33 в положении подачи толкают пассивные пластины 9а и 9b, посредством чего перемещающееся по конвейеру тело 2 начинает двигаться вперед. В этом случае скорость перемещения вперед перемещающегося по конвейеру тела 2 больше скорости подвижных толкающих деталей 33 вследствие силы инерции, и она гасится при помощи приемников 32 пассивных пластин, которые двигаются вперед вместе с подвижными толкающими деталями 33.
Перемещающееся по конвейеру тело 2, продвинутое вперед парой левого и правого подающих средств 26а и 26b посредством пассивных пластин 9а и 9b, как описано выше, переводится с неподвижно закрепленных направляющих рельсов 14а и 14b на направляющие рельсы 17а и 17b поворотного основания 15, находящегося в горизонтальном положении ожидания. Когда все перемещающееся по конвейеру тело 2 переводится в неподвижно закрепленное местоположение на поворотном основании 15, подвижные тела 30 подающих средств 26а и 26b останавливаются в местоположениях их предельного рубежа продвижения. Когда перемещающееся по конвейеру тело 2 подается в неподвижно закрепленное положение на поворотном основании 15, четыре входящих в зацепление пальца 11а-12b в нижней части перемещающегося по конвейеру тела 2 горизонтально устанавливаются внутрь вогнутых участков 46 вертикальных пластин 47 в четыре элемента с 44а по 44d средства 43 позиционирования и неподвижного закрепления поворотного основания 15, как показано на фиг. 7 и фиг. 8. Более того, блокируемые элементы 10а и 10b на обеих боковых сторонах перемещающегося по конвейеру тела 2 достигают внутренней стороны блокирующих подвижных частей 48 в состоянии отсутствия фиксации у пары правого и левого механизмов 45а и 45b блокировки средства 43 позиционирования неподвижного закрепления, как показано на фиг. 12. В этом состоянии первые управляющие части 55 средства 54а и 54b управления, расположенные снаружи соответствующих механизмов 45а и 45b блокировки, приводятся цилиндрическими блоками 56, управляющие пальцы 59 блокирующих подвижных частей 48 с помощью толчка передвигаются назад первыми управляющими частями 55, а затем блокирующие подвижные части 48 поворачиваются вокруг вертикальных шпинделей 51 из состояния отсутствия фиксации в состояние действия фиксации, как показано на фиг. 14. Вращение блокирующей подвижной части 48 в этот момент выполняется вопреки сильному сопротивлению трения, задаваемому тарельчатыми пружинами 53.
Поскольку блокирующие подвижные части 48 пары левого и правого механизмов 45а и 45b блокировки переключены в состояние действия фиксации, перемещение назад блокируемых элементов 10а и 10b перемещающегося по конвейеру тела 2 предотвращается блокирующими подвижными частями 48, как показано на фиг. 14. Дополнительно, перемещение вперед перемещающегося по конвейеру тела 2 предотвращается четырьмя элементами 44a-44d поворотного основания 15, в которые устанавливаются четыре входящих в зацепление пальца 11а-12b перемещающегося по конвейеру тела 2. Как результат, перемещающееся по конвейеру тело 2, установленное на поворотное основание 15 парой левых и правых подающих средств 26а и 26b, располагается таким образом, что не передвигается в направлении назад и вперед из неподвижно закрепленного местоположения на поворотном основании 15. Дополнительно, подъем вверх перемещающегося по конвейеру тела 2 в отношении направляющих рельсов 17а и 17b поворотного основания 15 предотвращается четырьмя элементами 44a-44d позиционирования (вогнутыми участками 46 вертикальных пластин 47) поворотного основания 15, в которые установлены четыре входящих в зацепление пальца 11а-12b перемещающегося по конвейеру тела 2. Следовательно, перемещающееся по конвейеру тело 2 приводится в жестко закрепленное состояние в неподвижно закрепленном местоположении на поворотном основании 15.
Поскольку перемещающееся по конвейеру тело 2 располагается в неподвижном закрепленном местоположении на поворотном основании 15 в горизонтальном положении ожидания при помощи элементов 44a-44d позиционирования и механизмов 45а и 45b блокировки средства 43 позиционирования и неподвижного закрепления вышеописанным образом, поворотное основание 15 вращается на предопределенный угол по направлению вперед и вниз вокруг шпинделя 16 горизонтального вращения приводящим средством 21. Более точно, снаряженный редуктором скорости двигатель 24 приводящего средства 21 работает для привода во вращение шпинделя 16 горизонтального вращения в направлении вперед при помощи прямозубного колеса 23 небольшого диаметра и прямозубного колеса 22 большого диаметра, а поворотное основание 15, неподвижно закрепленное на шпинделе 16 горизонтального вращения, находящегося в местоположении в окрестности его переднего конца, вращается по направлению вперед и вниз. Как результат, перемещающееся по конвейеру тело 2 вращается вокруг шпинделя 16 горизонтального вращения таким образом, чтобы повернуться верхней частью вниз вместе с поворотным основанием 15, как показано мнимой линией на фиг. 1, а изделие, неподвижно закрепленное на перемещающемся по конвейеру теле 2, погружается в жидкость обработки, находящуюся в ванне 1 обработки. Первый угол остановки вращения (185 градусов в варианте осуществления, как показано) шпинделя 16 горизонтального вращения в отношении жидкости обработки во время погружения изделия W, скорость перемещения во время вращения и повторное переключение направлений вращения, между тем как изделие W погружается, являются автоматически выполняемыми программой обработки, имеющей предварительные установки согласно деталям обработки.
Когда поворотное основание 15 вращается по направлению вперед и вниз от горизонтального положения ожидания для того, чтобы погрузить изделие W, пассивные пластины 9а и 9b перемещающегося по конвейеру 2 тела остаются вверху в положении между приемниками 32 пассивной пластины и подвижными толкающими деталями 33, находящимися в местоположении предельного рубежа продвижения пары правого и левого подающих средств 26а и 26b, подавших перемещающееся по конвейеру тело 2 в неподвижно закрепленное местоположение на поворотном основании 15. Дополнительно, механизмы 45а и 45b блокировки средства 43 позиционирования и неподвижного закрепления, предотвращающие блокируемые элементы 10а и 10b перемещающегося по конвейеру тела 2 от ухода назад, вращаются вместе с поворотным основанием 15 таким образом, что перестают быть сверху в отношении средств 54а и 54b управления. Поскольку первые управляющие части 55 средств 54а и 54b управления возвращены в местоположения предельного рубежа втягивания, как показано мнимой линией на фиг. 14, цилиндрическими блоками 56 в этот момент, управляемые пальцы 59 блокирующих подвижных частей 48 остаются вверху между первыми управляющими частями 55 и вторыми управляющими частями 57 средства 54а и 54b управления. Блокирующие подвижные части 48 механизмов 45а и 45b блокировки на поворотном основании 15, повернутом из горизонтального положения ожидания, удерживаются при помощи сопротивления трению, приложенного тарельчатыми пружинами 53 в состоянии действия фиксации для предотвращения блокируемых элементов 10а и 10b от ухода назад.
При завершении погружения изделия W поворотное основание 15 поворачивается для возвращения в горизонтальное положение ожидания при помощи приводящего средства 21. Когда поворотное основание 15 возвращается в горизонтальное положение ожидания, где его задний конец поддерживается при помощи поддерживающих средств 38, пара левой и правой пассивных пластин 9а и 9b перемещающегося по конвейеру тела 2, размещенного и неподвижно закрепленного в местоположении на поворотном основании 15 при помощи средства 43 позиционирования и неподвижного закрепления, в направлении вниз устанавливается между приемниками 32 пассивных пластин и подвижными толкающими деталями 33, находящимися в местоположениях предельного рубежа продвижения подающих средств 26а и 26b, и в то же время управляемые пальцы 59 блокирующих подвижных частей 48, находящихся в состоянии действия фиксации пары левого и правого механизмов 45а и 45b блокировки на поворотном основании 15, фиксирующих пару левых и правых блокируемых элементов 10а и 10b перемещающегося по конвейеру тела 2, также в направлении вниз устанавливаются между первыми управляющими частями 55 и вторыми управляющими частями 57 средства 54а и 54b управления, посредством чего поворотное основание 15 возвращается к состоянию непосредственно после того, как перемещающееся по конвейеру тело 2 установлено в неподвижно закрепленное местоположение на поворотном основании 15 при помощи левого и правого подающих средств 26а и 26b.
После того как поворотное основание 15 возвращается в горизонтальное положение ожидания, как показано мнимой линией на фиг. 14, вторые управляющие части 57 средства 54а и 54b управления приводятся в прямом направлении цилиндрическими блоками 58. При помощи этих управляющих частей 57, управляемые пальцы 59 блокирующих подвижных частей 48 в механизме 45а и 45b блокировки поворотного основания 15 толкаются вперед и блокирующие подвижные части 48 возвращаются в состояние отсутствия фиксации, как показано на фиг. 12. Впоследствии подвижные тела 30 пары левого и правого подающих средств 26а и 26b могут втягиваться из местоположения предельного рубежа продвижения, посредством чего приемники 32 пассивных пластин, втягивающиеся при помощи подвижных тел 30, могут перетащить и передвинуть перемещающееся по конвейеру тело 2 с направляющих рельсов 17а и 17b поворотного основания 15 на неподвижно закрепленные направляющие рельсы 14а и 14b при помощи пассивных пластин 9а и 9b перемещающегося по конвейеру тела 2. Когда подвижные тела 30 достигают исходных местоположений предельного рубежа втягивания, перемещающееся по конвейеру тело 2 тоже достигает предопределенного местоположения на неподвижно закрепленных направляющих рельсах 14а и 14b. Таким образом, перемещающееся по конвейеру тело 2 должно быть только снова отправлено назад на наземную линию 3 перемещения двигательным устройством, иллюстрация которого опущена.
Далее со ссылкой на фиг. 15-20 будет описан другой вариант осуществления блокирующей подвижной части средства 43 позиционирования для позиционирования перемещающегося по конвейеру тела 2, переведенного на поворотное основание 15 в неподвижно закрепленное местоположение, и неподвижного закрепления перемещающегося по конвейеру тела 2 с поворотным основанием и средства управления для блокирующей подвижной части. Блокирующая подвижная часть 63 и средство 64 управления согласно другому варианту осуществления предоставлены как левая и правая пара, согласно блокируемым элементам 10а и 10b, предоставленным на обеих боковых сторонах перемещающегося по конвейеру тела 2 соответственно таким же образом как блокирующие подвижные части 48 и его средства 54а и 54b управления, как показано в описанном выше варианте осуществления. Однако для этого будет проиллюстрирована и описана блокирующая подвижная часть 63 и средство 54 управления на одной стороне.
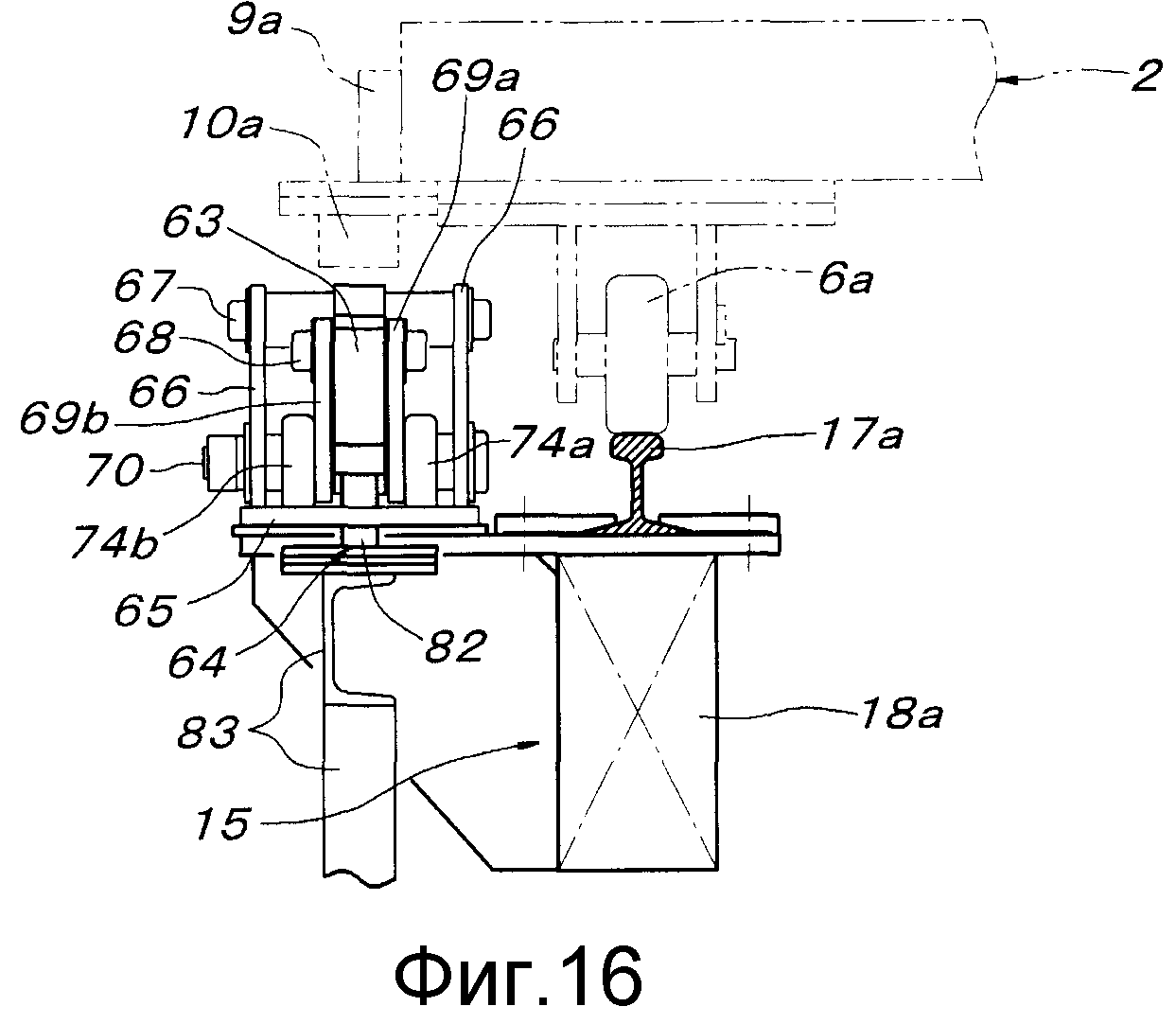
Поддерживающая пластина 65 выступающим образом предоставлена на боковой поверхности поворотного основания 15. На этой поддерживающей пластине 65 предоставлена выступающим образом пара левой и правой несущих пластин 66. Передний конец блокирующей подвижной части 63 шарнирно поддерживается вертикально с возможностью поворота между несущими пластинами 66 при помощи горизонтального направленного слева направо шпинделя 67. Входящий в зацепление участок 63а предоставлен выступающим образом вверх от заднего конца блокирующей подвижной части 63. Блокирующая подвижная часть 63 предоставлена с управляемым участком 63b, который двигается в линейном направлении назад и вперед синхронно с качательным движением блокирующей подвижной части 63. Управляемый участок 63b состоит из пары левого и правого звеньев 69а и 69b, верхние концы которых соединены с обеими боковыми сторонами блокирующей подвижной части 63 при помощи шпинделя 68 с тем, чтобы быть поворачиваемыми в направлении назад и вперед, ролика толкателя 71, шарнирно поддерживаемого на нижнем конце между обоими звеньями 69а и 69b при помощи горизонтального направленного слева направо шпинделя 70 и пары левых и правых направляющих роликов 73а и 73b, поддерживаемых на обоих концах шпинделя 70 так, чтобы устанавливаться в длинные направляющие отверстия 72, удлиняющиеся в направлении назад и вперед, предоставленные на паре левой и правой несущих пластин 66. Дополнительно, пара левого и правого поддерживающих роликов 74а и 74b, прокатывающихся снаружи пары левого и правого звеньев 69а и 69b по поддерживающей пластине 65, поддерживается шпинделем 70.
В дополнение, предоставляется спиральная пружина 75 сжатия для смещения шпинделя 70 по направлению к задним концам длинных направляющих отверстий 72. Спиральная пружина 75 сжатия устанавливается снаружи направленного спереди назад стержня 77, имеющего передний конец, соединенный со шпинделем 70, и другой конец, проходящий сквозь гнездо 76 пружины, выступающим образом предоставленным на поддерживающей пластине 65, в местоположении на расстоянии от пары левой и правой несущих пластин 66 между гнездом 76 пружины и гнездом 78 пружины, предоставленных на стержне 77, и имеющую возможность регулировки в заданное местоположение. Передний конец стержня 77 неподвижно соединяется с элементом 79 U-формы, соединенным со шпинделем 70 вертикально с возможность поворота, между тем как помещая посередине ролик толкателя 71. Ссылочной позицией 80 обозначен стопорный элемент, прикрепленный к заднему концу стержня 77.
Поддерживающая пластина 65 предоставлена с длинным отверстием 81, удлиняющимся в направлении назад и вперед ниже траектории движения ролика 71 толкателя. Как показано на фиг. 15-17, элемент 82 управления, выступающий выше, чем поддерживающая пластина через длинное отверстие 81 поддерживающей пластины, когда поворотное основание 15 находится в горизонтальном положении ожидания, размещается на неподвижно закрепленной станине 25 посредством поддерживающего элемента 83. Элемент 82 управления образован из плоской пластины вдоль направления назад и вперед, имеющей верхний край, обеспеченный наклоненной клиновидной поверхностью 82а, принудительно перемещающей ролик толкателя 71 вперед против силы смещения спиральной пружины 75 сжатия во время того, когда выдается вверх из длинного отверстия 81 поддерживающей пластины 65. Т.е. управляющее средство 64 управления для блокирующей подвижной части 63 в этом варианте осуществления образовано элементом 82 управления, позиционно неподвижно закрепленным только с неподвижно закрепленной станиной 25.
Согласно вышеописанной конфигурации, позиционно неподвижно закрепленный элемент 82 управления на неподвижно закрепленной станине 25 выступает выше, чем поддерживающая пластина 65 поворотного основания 15, через длинное отверстие 81 поддерживающей пластины 65, а наклонная клиновидная поверхность 82а элемента 82 управления принудительно двигает ролик толкателя 71 вперед против силы смещения спиральной пружины 75 сжатия, когда поворотное основание 15 находится в горизонтальном положении ожидания, как показано на фиг. 15-17. Более точно, ролик толкателя 71, шпиндель 70, поддерживающие ролики 74а и 74b и направляющие ролики 73а и 73b передвигаются относительно передних концов длинных направляющих отверстий 72, а нижние концы пары левых и правых звеньев 69а и 69b толкаются вперед, чтобы продвинуть блокирующую подвижную часть 63 вниз, когда поворотное основание 15 находится в горизонтальном положении ожидания. То есть блокирующая подвижная часть 63 наклоняется вниз вокруг шпинделя 67, и приходящий в зацепление участок 63а на ее заднем конце поворачивается до состояния отсутствия блокировки, когда находится ниже траектории движения блокируемых элементов 10а и 10b во время, когда перемещающееся по конвейеру тело 2 передвигается на поворотное основание 15 и покидает его. Таким образом, перемещающееся по конвейеру тело 2 может быть выполнено для передвижения по поворотному основанию 15 в горизонтальное положение ожидания таким же образом, как в ранее описанном варианте осуществления.
Когда перемещающееся по конвейеру тело 2 достигает предопределенного местоположения на поворотном основании 15, а входящие в зацепление пальцы 11а-12b перемещающегося по конвейеру тела 2 устанавливаются в элементы 44а-44d позиционирования поворотного основания 15 подобно тому, как в ранее описанном варианте осуществления, поворотное основание 15 приводится вращательным образом вокруг шпинделя 16 горизонтального вращения в направлении вперед с опусканием, как показано на фиг. 20. Наряду с вращением поворотного основания 15 ролик 71 толкателя поворотного основания 15 уходит вверх от позиционно неподвижно закрепленного элемента 82 управления на неподвижно закрепленной станине 25. Как результат, ролик 71 толкателя под давлением передвигается назад при помощи силы смещения спиральной пружины 75 сжатия вместе с вращением поворотного основания. Сила смещения спиральной пружины 75 сжатия двигает ролик 71 толкателя, шпиндель 79, поддерживающие ролики 74а и 74b и направляющие ролики 73а и 73b в местоположение переднего конца длинных направляющих отверстий 72 и поднимает блокирующую подвижную часть 63 посредством пары левого и правого звеньев 69а и 69b. Таким образом, когда поворотное основание 15 незначительно поворачивается, а элемент 82 управления выходит вниз из длинного отверстия 81 поддерживающей пластины 65 в поворотном основании 15, направляющие ролики 73а и 73b достигают местоположений переднего конца длинных направляющих отверстий 72 (местоположение предельного рубежа продвижения), пара левого и правого звеньев 69а и 69b принимают, по существу, перпендикулярное поддерживающее положение в отношении блокирующей подвижной части 63, а блокирующая подвижная часть 63 переключается в состояние действия блокировки, где входящий в зацепление участок 63а на ее заднем конце позиционируется сразу после того, как блокируемый элемент 10а или 10b перемещающегося по конвейеру тела 2 позиционируется в неподвижно закрепленное местоположение на поворотном основании 15.
Поскольку блокирующая подвижная часть 63 автоматически переключается из состояния снятия блокировки в состояние действия блокировки на начальном этапе вращения поворотного основания 15, как описано выше, перемещающееся по конвейеру тело 2, переведенное в неподвижно закрепленное местоположение на поворотном основании 15, может быть неподвижно закреплено в местоположении на поворотном основании 15 подобным образом, как в ранее описанном варианте осуществления, по причине того, что входящие в зацепление пальцы 11а-12b перемещающегося по конвейеру тела 2 устанавливаются в элементы 44а-44b позиционирования поворотного основания 15 и того, что блокирующая подвижная часть 63 в состоянии действия блокировки поворотного основания 15 позиционируется непосредственно за блокируемыми элементами 10а или 10b перемещающегося по конвейеру тела 2.
Когда поворотное основание 15 вращается с переворотом и возвращается в его начальное горизонтальное местоположение ожидания, элемент 82 управления закрепленной неподвижно станины 25 входит снизу в длинное отверстие 81 поддерживающей пластины 65 поворотного основания 15, как упомянуто выше, и его наклоненная клинообразная поверхность 82а принудительно двигает нижние концы пары левого и правого звеньев 69а и 69b по направлению против силы смещения спиральной пружины 75 сжатия посредством ролика толкателя 71 и уводит блокирующую подвижную часть 63 вниз для переключения блокирующей подвижной части 63 в состояние снятия блокировки. Следовательно, входящий в зацепление участок 63а на задней части блокирующей подвижной части 63 становится ниже, чем траектория движения блокируемого элемента 10а или 10b в то время, когда перемещающееся по конвейеру тело 2 передвигается и покидает поворотное основание 15, и, таким образом, перемещающееся по конвейеру тело 2 может попасть на поворотное основание 15 и с него, находящегося в горизонтальном положении ожидания, таким же образом как в ранее описанном варианте осуществления.
Направляющие рельсы 17а и 17b показаны в качестве направляющего средства перемещаемого тела для удобного перемещения с поддержкой и направления перемещающегося по конвейеру тела 2 на поворотном основании 15. Однако, если перемещающемуся по конвейеру телу 2 предоставлены санообразные рельсы, на поворотном основании 15 также может быть предоставлено средство направления перемещающегося тела, образованное из групп роликов перемещения с поддержкой и направлением перемещающегося по конвейеру тела 2 при помощи санообразных рельсов.
Промышленная применимость
Устройство погружения настоящего изобретения может быть использовано в качестве устройства погружения переворачиваемого кузова автомобиля, переведенного при неподвижном закреплении на перемещающемся по конвейеру теле, верхней частью вниз вместе с перемещающимся по конвейеру телом, причем погружение кузова машины осуществляется в ванну обработки, где выполняется окраска или поверхностная обработка перед или после окраски кузова машины и выполняется поверхностная обработка кузова машины.
Перечень ссылочных позиций
1: Ванна обработки
2: Перемещающееся по конвейеру тело
3: Наземная линия перемещения
4a, 4b, 14a, 14b, 17a, 17b: Направляющий рельс
9a, 9b: Пассивная пластина
10a, 10b: Блокируемый элемент
11a-12b: Входящий в зацепление палец
15: Поворотное основание
16: Шпиндель горизонтального вращения
21: Приводящее средство
24: Снаряженный редуктором скорости двигатель
26a, 26b: Подающее средство
29: Блок направляющих рельсов
30: Подвижное тело
31, 56, 58: Цилиндрический блок
32: Приемник пассивной пластины
33: Подвижная толкающая деталь
34: Опорная пластина L-формы
36: Средство смещения
36h: Спиральная пружина сжатия
37: Искривленная пластина
38: Поддерживающее средство
39a, 39b: Направляющая позиционирования
40a, 40b: Приемник
43: Средство позиционирования и неподвижного закрепления
44a-44d: Элемент позиционирования
45a, 45b: Механизм блокировки
48, 63: Блокирующая подвижная часть
53: Тарельчатая пружина
54a, 54b, 64: Средство управления
55, 57: Управляющая часть
59: Управляемый палец
63a: Участок, входящий в зацепление
63b: Управляемый участок
65: Поддерживающая пластина
66: Несущая пластина
69a, 69b: Звено
71: Ролик толкателя
72: Длинное направляющее отверстие
73a, 73b: Направляющий ролик
74a, 74b: Поддерживающий ролик
75: Спиральная пружина сжатия
81: Длинное отверстие
82: Элемент управления
82a: Наклоненная клинообразная поверхность
Реферат
Устройство предназначено для поверхностной обработки изделия (W), в частности кузова автомобиля, путем его погружения в ванну (1). Изделие перемещается по конвейеру на теле (2) и погружается верхней стороной вниз в ванну. Устройство погружения имеет средство позиционирования и неподвижного закрепления для позиционирования перемещающегося по конвейеру тела на направляющем рельсе (17а) на поворотном основании (15), и неподвижного закрепления перемещающегося по конвейеру тела с поворотным основанием. Подающее средство подает перемещающееся по конвейеру тело в неподвижно закрепленное местоположение на поворотном основании. Упрощается конструкция устройства. 2 н. и 3 з.п. ф-лы, 22 ил.
Формула
ванну (1) обработки, в которую погружается изделие (W) для обработки его поверхности;
горизонтальный шпиндель (16), проходящий над ванной (1) обработки;
поворотное основание (15), поддерживаемое с возможностью вращения вокруг горизонтального шпинделя (16);
приводящее средство (21) для вращения поворотного основания (15) в направлении вперед и назад между положением ожидания, когда оно расположено, по существу, горизонтально над ванной (1) обработки, и положением переворота, когда оно повернуто по направлению вперед и вниз из положения ожидания и обращено верхней стороной вниз;
направляющее средство (17а, 17b) перемещающегося тела, обеспеченное на поворотном основании (15) для того, чтобы поддерживать и направлять перемещение перемещающегося по конвейеру тела (2) вдоль направления назад и вперед, ортогонального горизонтальному шпинделю (16);
наземная линия (3) перемещения, с которой перемещающееся по конвейеру тело (2), на которое погружено и жестко закреплено изделие (W), может быть переведено на направляющее средство (17а, 17b) перемещающегося тела поворотного основания (15), находящегося в положение ожидания, причем наземная линия (3) перемещения, служащая в качестве линии приближения и линии отхода перемещающегося по конвейеру тела (2) относительно поворотного основания (15), соединяется с направляющим средством (17а, 17b) перемещаемого тела только на заднем конце поворотного основания (15), находящегося в положении ожидания;
средство (43) позиционирования и жесткого закрепления для позиционирования перемещающегося по конвейеру тела (2), переведенного с заднего конца поворотного основания (15) на поворотное основание (15) посредством направляющего средства (17а, 17b) перемещающегося тела, в закрепленное местоположение и жесткого закрепления перемещающегося по конвейеру тела с поворотным основанием (15);
подающее средство (26а, 26b) для подачи перемещающегося по конвейеру тела (2) в местоположение закрепления на поворотном основании (15), позиционированного при помощи средства (43) позиционирования и жесткого закрепления; и
средство (54а, 54b) управления для переключения средства (43) позиционирования и жесткого закрепления между состоянием отсутствия фиксации и состоянием действия фиксации;
причем поворотное основание (15) поддерживается в местоположении, более ближнем к его переднему концу, нежели чем в его центральном местоположении направления спереди назад, горизонтальным шпинделем (16), и имеется поддерживающее средство (38) для приема заднего конца поворотного основания (15), находящегося в положении ожидания;
при этом поворотное основание (15) состоит из пары левого и правого направленных спереди назад рамных материалов (18а, 18b), причем направляющее средство перемещающегося тела на поворотном основании (15) состоит из пары левого и правого направляющих рельсов (17а, 17b), которые лежат в направленных спереди назад рамных материалах (18а, 18b), образующих поворотное основание (15), и поддерживающих колес (5а-6b) перемещающегося по конвейеру тела (2), при этом поддерживающее средство (38) состоит из пары левой и правой направляющих (39а, 39b) позиционирования, в которые установлены задние концы пары левого и правого направленных спереди назад рамных материалов (18а, 18b), и приемников (40а, 40b) для приема задних концов направленных спереди назад рамных материалов (18а, 18b).
ванну (1) обработки, в которую погружается изделие (W) для обработки его поверхности;
горизонтальный шпиндель (16), проходящий над ванной (1) обработки;
поворотное основание (15), поддерживаемое с возможностью вращения вокруг горизонтального шпинделя (16);
приводящее средство (21) для вращения поворотного основания (15) в направлении вперед и назад между положением ожидания, когда оно расположено, по существу, горизонтально над ванной (1) обработки, и положением переворота, когда оно повернуто по направлению вперед и вниз из положения ожидания и обращено верхней стороной вниз;
направляющее средство (17а, 17b) перемещающегося тела, обеспеченное на поворотном основании (15) для того, чтобы поддерживать и направлять перемещение перемещающегося по конвейеру тела (2) вдоль направления назад и вперед, ортогонального горизонтальному шпинделю (16);
наземная линия (3) перемещения, с которой перемещающееся по конвейеру тело (2), на которое погружено и жестко закреплено изделие (W), может быть переведено на направляющее средство (17а, 17b) перемещающегося тела поворотного основания (15), находящегося в положение ожидания, причем наземная линия (3) перемещения, служащая в качестве линии приближения и линии отхода перемещающегося по конвейеру тела (2) относительно поворотного основания (15), соединяется с направляющим средством (17а, 17b) перемещаемого тела только на заднем конце поворотного основания (15), находящегося в положении ожидания;
средство (43) позиционирования и жесткого закрепления для позиционирования перемещающегося по конвейеру тела (2), переведенного с заднего конца поворотного основания (15) на поворотное основание (15) посредством направляющего средства (17а, 17b) перемещающегося тела, в закрепленное местоположение и жесткого закрепления перемещающегося по конвейеру тела с поворотным основанием (15);
подающее средство (26а, 26b) для подачи перемещающегося по конвейеру тела (2) в местоположение закрепления на поворотном основании (15), позиционированного при помощи средства (43) позиционирования и жесткого закрепления; и
средство (54а, 54b) управления для переключения средства (43) позиционирования и жесткого закрепления между состоянием отсутствия фиксации и состоянием действия фиксации;
при этом перемещающееся по конвейеру тело (2) имеет нижнюю часть, оснащенную, по меньшей мере, передней и задней парами горизонтальных направленных слева направо пальцев (11а-12b), входящих в зацепление, причем средство (43) позиционирования и неподвижного закрепления состоит, по меньшей мере, из передней и задней пар элементов (44a-44d) позиционирования, имеющих боковые вогнутые участки (46), в которые горизонтально устанавливаются соответствующие пальцы (11а-12b), входящие в зацепление, перемещающегося по конвейеру тела (2), передвинутого на поворотное основание (15), при этом блокирующая подвижная часть (48) переключается между состоянием действия фиксации для предотвращения ухода назад перемещающегося по конвейеру тела (2), чьи входящие в зацепление пальцы (11а-12b) устанавливаются внутрь соответствующих боковых вогнутых участков (46) элементов (44a-44d) позиционирования, и состоянием отсутствия фиксации, допускающим уход назад перемещающегося по конвейеру тела (2).
Комментарии