Установка робота для окрашивания объектов - RU2104807C1
Код документа: RU2104807C1
Чертежи




Описание
Настоящее изобретение имеет отношение к установке робота для окрашивания различных объектов внутри кабины для окрашивания, имеющей стенки, изолирующие подлежащий окрашиванию объект от окружающей среды.
Программируемые роботы известны сами по себе и хорошо описаны в литературе. Специальные типы таких роботов предназначены для использования при окрашивании определенных объектов, например легковых автомобилей, причем робот такого типа может быть "обучен" или запрограммирован опытным оператором для осуществления соответствующих движений окрашивающего приспособления (инструмента) для наложения предписанного слоя краски на определенный участок поверхности корпуса автомобиля.
Окрашивание легковых автомобилей в промышленном масштабе производится в кабинах для окрашивания, через которые корпуса автомобилей перемещаются последовательно по конвейеру. Такие кабины могут иметь определенную изоляцию для защиты окружающей среды от воздействия вредных для здоровья зон окраски.
Для внешнего окрашивания корпусов автомобилей в таких кабинах обычно используют простые и экономичные механизмы с возвратно-поступательным движением или другие аналогичные устройства. Аппараты такого типа могут иметь достаточный диапазон возвратно-поступательного перемещения в вертикальном направлении, но достаточно ограниченные возможности перемещения в поперечном направлении кабины для окрашивания с практическим отсутствием возможности слежения за подлежащим окрашиванию объектом в направлении движения конвейера через кабину. Поэтому несколько таких механизмов с возвратно-поступательным движением, имеющих перекрывающиеся рабочие зоны вдоль длины кабины, должны использоваться для сохранения разумной скорости конвейера и обеспечения необходимого качества покрытия краской.
Для нанесения однородного слоя краски и достижения оптимального качества окрашивания краска должна распыляться из приспособления для окрашивания управляемым образом нормально к покрываемой краской поверхности. Затем должна быть запрограммирована соответствующим образом траектория перемещения приспособления для окрашивания с учетом наличия изогнутых поверхностей и углов корпуса автомобиля. Это может быть осуществлено только при помощи манипуляторов роботов с шестью или более осями перемещения, что позволяет также осуществлять эффективное слежение за подлежащим окрашиванию объектом при достижении более высокой скорости прохождения конвейера через кабину для окрашивания. Такие роботы должны быть установлены в самой кабине для окрашивания, что требует использования значительно более широких кабин, чем в случае использования упомянутых ранее механизмов с возвратно- поступательным движением.
Однако более широкие кабины для окрашивания требуют прохождения через кабину гораздо больших объемных потоков воздуха для вентиляции, причем значительные перемещения манипуляторных частей роботов с множеством осей движения, которые расположены внутри кабины, могут создавать турбулентности воздушного потока.
Однако основным требованием является то, чтобы поток воздуха вдоль подлежащего окрашиванию объекта при этом сохранялся однородным, чтобы не оказывать воздействия на распыленные диспергированные частицы краски, направленные от приспособления для окрашивания в направлении поверхностей, которые должны быть равномерно окрашены.
Как объяснено ранее, как использование установленных на стенках механизмов с возвратно-поступательным движением, так и размещение современных роботов в пределах кабины для окрашивания имеет определенные недостатки. В связи с указанным основной задачей настоящего изобретения является создание такой установки робота, которая в значительной степени позволяет преодолеть все такие недостатки.
Однако следует отметить, что настоящее изобретение направлено единственно на монтаж и установку роботов для указанной выше и аналогичных целей и не касается проектирования или конструирования окрашивающих роботов самих по себе или программирования роботов для обеспечения эффективных и удовлетворительных операций окрашивания в соответствии с формой и движениями подлежащих окрашиванию объектов.
Такие конструкции и программы уже хорошо известны из литературы, например из патента Великобритании GB N 1431413 или патента США US N 4920500, полученных на имя заявителя настоящей заявки.
Таким образом, настоящее изобретение имеет отношение к установке (монтажу) робота для окрашивания объектов внутри кабины, имеющей стенки, изолирующие подлежащий окрашиванию объект от окружающей среды, причем такая установка включает в себя по меньшей мере один вал робота, объединенный с приспособлением для окрашивания и выступающий через по меньшей мере одну щель в стенках кабины, предназначенный для осуществления управляемых от сервопривода перемещений вдоль указанной щели и/или, возможно, в направлении вдоль (относительно) оси указанного вала, и сервопривод, управляющий движениями указанного вала робота в соответствии с запрограммированной траекторией перемещений указанного окрашивающего приспособления.
От известного состояния техники установка робота в соответствии с настоящим изобретением отличается тем, что указанная щель расположена в поворотном элементе, установленном в или на стенках кабины, причем сервопривод содержит средства управления вращательными перемещениями указанного поворотного элемента в соответствии с указанной запрограммированной траекторией перемещения.
В качестве такого поворотного элемента может быть использован круглый диск, установленный с возможностью вращения в плоскости, идентичной или параллельной плоскости стенки кабины, причем имеется щель, которая преимущественно идет вдоль диаметра указанного диска, или, альтернативно, может быть использован преимущественно полый цилиндр, установленный с возможностью вращения относительно преимущественно вертикальной оси, смонтированной в одной из стенок кабины или параллельно ей, причем указанный вал робота выступает через по меньшей мере одну щель, главным образом параллельную указанной оси вращения. В обоих случаях эффективное слежение в направлении перемещения по конвейеру подлежащего окрашиванию объекта достигается за счет вращения поворотного элемента, возможно в комбинации с перемещениями вала робота в щели.
Преимущественно сервопривод может быть размещен внутри указанного полого цилиндра и может приводить в движение указанный вал робота в щели за счет движений поворота относительно по меньшей мере двух осей.
При практической реализации вал робота может быть также соединен с приспособлением для окрашивания посредством манипуляторной связи, содержащей по меньшей мере одну, а преимущественно три или более осей движения.
Установка робота в соответствии с изобретением описана далее со ссылкой на сопроводительные чертежи.
На фиг. 1 показана схематически кабина для окрашивания в соответствии с известным уровнем техники, имеющая четыре окрашивающих робота, установленные внутри кабины; на фиг. 2 - кабина для окрашивания, имеющая встроенные в стенку роботы в соответствии с изобретением; на фиг. 3 - принцип встраивания в стенку поворотного элемента с щелью и с выступающим валом робота в соответствии с первым вариантом осуществления изобретения, в котором указанным элементом является диск с щелью; на фиг. 4-6 - принцип встраивания в стенку поворотного элемента с щелью и с выступающим валом робота в соответствии с другим вариантом осуществления изобретения, в котором указанными элементами являются цилиндры с щелями.
Так как настоящее изобретение не имеет отношения к проектированию и конструкции собственно манипуляторов робота или их составляющих частей, а только к соответствующему встраиванию в стенку кабины определенных подвижных элементов робота, то в дальнейшем изложении будут в принципе описаны и показаны на чертежах только те элементы, которые имеют отношение к такому встраиванию.
На фиг. 1 схематически показан в сечении вид сверху обычной известной кабины для окрашивания CA, имеющей боковые стенки WA и торцевые стенки WB, а также корпус легкового автомобиля AU, расположенный в центральной части указанной кабины. Показаны также четыре окрашивающих робота PR, которые размещены в кабине вдоль боковых стенок соответствующим образом для эффективного окрашивания корпуса автомобиля. Этими роботами являются современные роботы-манипуляторы, имеющие большое число осей движения, которые в результате способны осуществлять детальные операции окрашивания в соответствии с "предварительно обученной" программой окрашивания, адаптированной для данного определенного типа корпуса автомобиля.
Корпуса автомобилей данного типа затем перемещаются последовательно по конвейеру (как это показано жирной стрелкой на фиг. 1), входят в кабину для окрашивания CA и проходят через нее через имеющиеся для этой цели входные и выходные окна CI, CO. Следует указать, что прерывистое перемещение конвейера адаптировано к программе окрашивания робота- манипулятора PR с целью достижения равномерного покрытия краской и оптимального слежения окрашивающих роботов за перемещающимися корпусами автомобилей AU.
Как можно видеть из фиг. 1, окрашивающие роботы PR в этом стандартном варианте построения занимают чрезмерно большую часть объема кабины. Следует также предположить, что большие по размерам движущиеся узлы манипуляторов роботов при их интенсивном движении будут создавать турбулентности потока вентилирующего воздуха через кабину, что может отрицательно сказываться на равномерность наложения слоя краски, распыляемой на поверхность корпуса автомобиля в диспергированном виде.
Эти недостатки могут быть устранены в значительной степени в более узкой кабине, снабженной простыми механизмами с возвратно-поступательным движением, предназначенными для окрашивания легковых автомобилей при помощи приспособлений для окрашивания, установленных на рычагах (кронштейнах), проходящих через узкие щели в стенках кабины и имеющих возможность совершать возвратно-поступательное движение в вертикальном направлении вдоль щели, как это упоминалось ранее.
Однако при таком решении проблемы качество окраски существенно ухудшается, что недопустимо во многих случаях, когда первичными требованиями является равномерность покрытия краской и поддержание надежности процесса окрашивания.
В связи с изложенным с целью комбинирования узкой кабины с роботами- манипуляторами, способными обеспечить высокое качество окраски при уменьшенном возмущающем воздействии на вентилирующий воздух, в соответствии с изобретением предлагается встроить роботы в стенки кабины.
Такая кабина для окрашивания CA с встроенной в стенку установкой робота IR показана на фиг. 2, где кабина, имеющая такое же общее конструктивное выполнение, как и на фиг.1, показана в том же самом масштабе, причем соответствующие элементы обозначены теми же самыми позициями, что и на фиг.1. На фиг. 2 в верхней части показано выполнение более короткой кабины с двумя встроенными в стенку роботами, в то время как в нижней части фиг. 2 показано построение более протяженной кабины с тремя встроенными в стенку роботами. В обоих случаях операционное поле различных роботов обозначено позицией N. Указанным образом получена установка роботов с более широкими операционными полями и с широкими возможностями слежения в сочетании с уменьшенными размерами кабины.
Один из путей встраивания робота-манипулятора в стенку кабины показан на фиг. 3. В этом случае использован круглый диск CD, имеющий диаметральную щель LS, который установлен в стенке кабины WA с возможностью его вращения. Такая опора с возможностью вращения может быть осуществлена при помощи любого известного самого по себе подходящего средства. Диапазон вращения простирается от полного поворота до желательной его части, например от половины или четверти полного поворота. Основной вал (рука) манипулятора RS выступает через диаметральную щель и может совершать возвратно-поступательное перемещение вдоль щели и осевое перемещение вдоль вала.
Таким образом, при помощи щелевого диска CD и выступающего вала обеспечиваются три оси перемещения для робота-манипулятора, а именно, ось вращения диска, обозначенная на фиг. 3 как S1, ось возвратно-поступательного перемещения вала вдоль диска, обозначенная S2, и ось возвратно-поступательного перемещения указанного вала вдоль оси вала, обозначенная S3. За счет этого может быть произведена грубая установка приспособления для окрашивания в соответствии с установленной программой окрашивания при помощи привода с сервоуправлением поворотным диском и валом робота по всем декартовым координатам x, y и z, указанным на фиг. 3, то есть по длине, ширине и высоте соответственно кабины для окрашивания. Эффективная функция слежения по направлению х затем может быть обеспечена по базирующейся в стенке оси S1 при возможной комбинации с другими базирующимися в стенке осями перемещения S2 и S3.
Тонкий и точный выбор положения приспособления для окрашивания затем обеспечивается по осям движения S4, S5, S6, предусмотренным в запястной связи манипулятора ML, при помощи которой указанный вал робота RS соединяется с приспособлением для окрашивания, причем эта связь управляется сервоприводом.
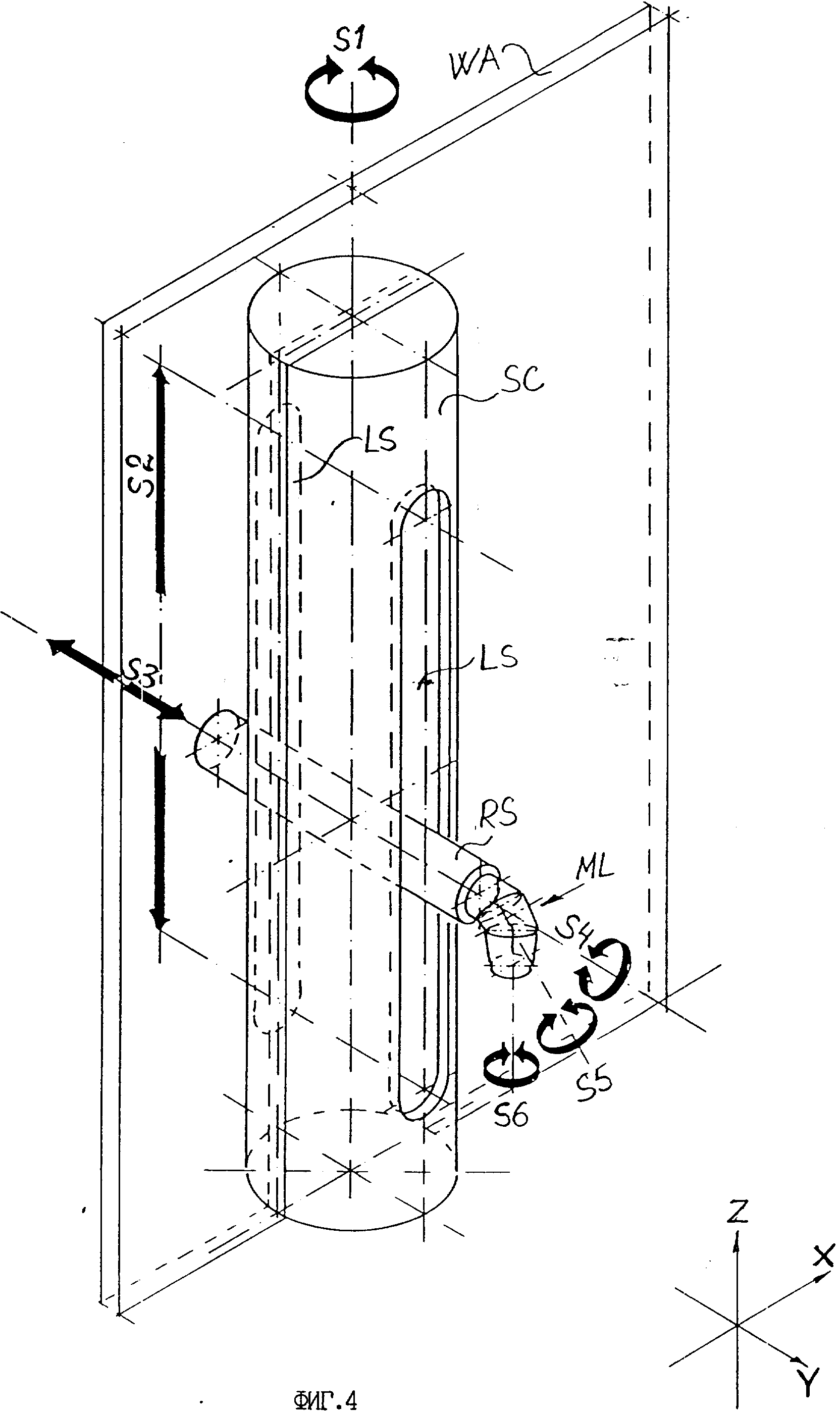
Другой вариант принципа построения встроенного в стенку указанного поворотного элемента окрашивающего робота показан на фиг. 4. В данном случае поворотным элементом является полый цилиндр с щелью SC, который установлен в стенке кабины вертикально с возможностью осуществления движений вращения относительно центральной оси цилиндра. Основной вал робота выступает через пару взаимно соосных щелей LS в стенках цилиндра, параллельных оси цилиндра. Грубые перемещения робота в направлениях указанных координат x, y и z, соответствующих упомянутым выше размерам кабины, в данном случае могут осуществляться за счет вращения цилиндра SC относительно его центральной оси, которая показана как ось движения S1, совместно с возвратно-поступательными перемещениями основного вала робота RS вдоль щели и перпендикулярно ей в соответствии с показанными на фиг. 4 осями движения S2 и S3 соответственно. В данном случае функция эффективного слежения в направлении х также может быть обеспечена при помощи базирующихся в стенке осей движения S1,S2 и S3.
На фиг. 5 показан вариант построения такого же типа, что и на фиг.4, содержащий поворотный цилиндр, встроенный в стенку кабины, с единственным отличием, заключающимся в том, что основной вал робота RS установлен с возможностью поворота в самом цилиндре, а не с возможностью возвратно-поступательных движений вдоль щели. В результате эти возвратно-поступательные движения заменены здесь движением поворота в значительно более короткой паре щелей цилиндра LS, как это показано осью вращения S2, при этом сохранены те же оси движения S1 и S3, что и на фиг. 4.
Указанным образом могут быть осуществлены при сервоуправлении такие же грубые перемещения робота по тем же декартовым осям x, y и z и связанное с этим отслеживание объекта, как это было объяснено ранее.
На фиг. 6 также изображен встроенный в стенку поворотный элемент в форме полого цилиндра SC. В этом случае цилиндр имеет соответствующую опору на более прочном основании, так как блок сервопривода установлен в самом цилиндре. При этом основной вал (рука) робота выступает через единственную щель в стенке цилиндра. В данном случае базирующиеся в стенке грубые перемещения робота в направлениях x, y и z осуществляются при помощи трех осей движения S1, S2 и S3 соответственно, причем это может обеспечивать также предусмотренное слежение за объектом, обсуждавшееся ранее.
Как в варианте, показанном на фиг. 3, так и в последующих вариантах, изображенных на фиг. 4,5 и 6, точные перемещения с сервоуправлением приспособлением для окрашивания осуществляются при помощи дополнительных осей движения S4, S5 и S6 запястной связи манипулятора ML.
При использовании встроенных в стенку установок робота в соответствии с изобретением удается значительно снизить размеры кабин для окрашивания при одновременном сохранении широких операционных полей роботов-манипуляторов. Достигаются эффективные функции слежения в направлении перемещения конвейера (направление оси x) даже в очень узких кабинах. В результате встраивания в стенку множества осей движения роботов-манипуляторов в промежуточном пространстве между стенками кабины и подлежащим окраске объектом (например, корпусом автомобиля) может работать ограниченное количество подвижных компонентов ограниченного размера, которые создают значительно меньшую турбулентность вентилирующего воздуха в объеме кабины, что позволяет добиться более равномерного покрытия краской окрашиваемой поверхности.
Практические испытания встроенных в стеку камеры установок показали, что может быть достигнута экономия порядка 10-25% по ширине кабины (направление y). В результате более эффективного слежения может быть достигнуто уменьшение длины кабины до 25% (направление x). Может быть достигнуто уменьшение подлежащего вентиляции объема кабины на 10-40%, что означает использование меньшего объема воздуха для вентиляции, получение меньшей турбулентности воздуха и меньшее отрицательное воздействие на процесс нанесения краски.
Реферат
Использование: изобретение имеет отношение к установке робота для окрашивания различных объектов внутри кабины для окрашивания. Сущность изобретения: в установке щель LS расположена на поворотном элементе (SD, SC), установленном в стенках кабины или на них. Сервопривод содержит средства для управления вращательными движениями указанного поворотного элемента в соответствии с указанной запрограммированной траекторией перемещения. Поворотный элемент может быть выполнен в виде круглого диска (CD), установленного с возможностью вращательного движения в плоскости, идентичной или параллельной плоскости стенки кабины. Щель преимущественно идет вдоль диаметра указанного диска. Поворотный элемент может быть выполнен в виде полого цилиндра (SC), установленного с возможностью вращательного движения относительно вертикальной оси в одной из стенок кабины или параллельно ей. Указанный вал робота выступает через по меньшей мере одну щель, главным образом параллельную указанной оси вращения. 6 з.п. ф-лы, 6 ил.

Комментарии