Способ нанесения красок и лаков - RU2316399C2
Код документа: RU2316399C2
Чертежи















Описание
Настоящее изобретение относится к способу нанесения красок и лаков и устройству для их нанесения в целях окрашивания наружных поверхностей объектов, таких как здания, общественные и гражданские инженерно-технические сооружения, в соответствии с образцом изображения. В качестве примера поверхностей объектов можно привести внутренние или наружные стены, полы и потолки жилых или промышленных помещений, а также поверхности объектов, сконструированных с применением бетона, таких как мосты, тоннели и дорожно-строительные конструкции, или шумоизоляционные экраны, щиты или крепления, или поверхности соответствующей категории.
В настоящее время поверхности вышеупомянутых объектов без исключения окрашиваются вручную посредством кисти или валика для нанесения красок, или окрашивание производится с использованием краскораспылителя. Окрашивание служит в качестве герметизации стен с одной стороны, но оно также используется в целях декорирования. Если требуется нанесение краской декоративного изображения на упомянутые поверхности, то нанесение краски может быть выполнено только талантливыми ремесленниками или художниками, обычно это процесс кропотливый и соответственно дорогой. Часто возникают существенные расхождения между ожиданиями клиентов и окончательным изображением. Поэтому желателен чисто технический способ, который сделал бы возможным нанесение декоративного изображения на указанные поверхности в соответствии с образцом изображения с применением красок или лаков, не требовал бы художественных навыков, и который бы обеспечил высокое качество нанесения изображения. Очевидно, что до настоящего времени не существует такого способа и устройства, которые, например, могли бы позволить произвести нанесение цветного рисунка в соответствии с цифровым образцом на поверхности архитектурных объектов, таких как здания, а также общественные и гражданские инженерно-технические сооружения.
Исходя из этого факта, задача изобретения состоит в том, чтобы создать простой и быстрый, при этом экономичный, и вместе с тем надежный способ нанесения красок или лаков, прежде всего, на поверхности архитектурных объектов с целью создания любого цветного рисунка.
Техническое решение изложено в пункте 1 формулы изобретения.
Согласно п.1 формулы изобретения устройство нанесения приводят в контакт с поверхностью и перемещают по ней произвольным образом. Устройство нанесения производит непрерывное измерение своих координат посредством бесконтактной системы позиционирования или вспомогательных датчиков перемещения и наносит краску, исходя из координат, измеренных в соответствии с вышеуказанным примером реализации. В процессе работы устройство нанесения автоматически прекращает нанесение краски в том случае, если его координаты по отношению к заданному допустимому порогу отклонения координаты не могут быть определены в достаточной мере точно или если краска уже была целиком нанесена на область координат наносимого краской элемента.
В соответствии с вышесказанным предложен быстрый и надежный способ, при помощи которого становится возможным нанесение имеющихся цифровых информационных изображений на любые поверхности объектов, таких как здания, общественные и гражданские инженерно-технические сооружения. При этом заявленный способ позволяет оператору устройства нанесения краски работать интуитивно, перемещая устройство в любой последовательности по произвольной области координат поверхности объекта. Этот интуитивный способ управления, в частности, дает возможность закрашивать поверхность полностью, включая области вокруг выступов, балконов, дверей, окон, подоконников и карнизов.
Данный способ согласно изобретению основан на идее передачи информации о цвете каждого минимального элемента изображения (пикселя), предварительно сохраненной в виде файла, на поверхность объекта путем непрерывного измерения координат устройством нанесения краски, с последующим нанесением краски после проведения сравнения сохраненной информации о цвете с соответствующими координатами устройства нанесения краски. Для нанесения цветового рисунка согласно способу изобретения обязательным условием является создание предварительной записи поверхности объекта с использованием измерительной техники, результатом чего должен являться цифровой объект, который, например, будет отображением поверхности в системе автоматизированного проектирования (Computer Aided Design, CAD), с последующим созданием эскиза требуемого объекта, выполненного в соответствии с пожеланиями дизайнера, т.е. существует геометрическое соответствие данных о цвете по отношению к истинным координатам поверхности данного объекта, см. Фиг.1. Цветовые характеристики поверхности исходного объекта также могут быть реализованы, если дополнительно записать их данные, с тем, чтобы сделать возможным включение имеющихся цветовых особенностей в эскиз или выравнивание нежелательных цветовых особенностей, таких как пятнышки на поверхности.
При перемещении подвижного устройства нанесения краски по поверхности объекта система измерения координат непрерывно сообщает текущие координаты устройства. Благодаря тому, что известны координаты каждого отдельного наносимого краской элемента эскиза и известны координаты устройства нанесения краски по отношению к поверхности объекта, возможно вычисление координат каждого наносимого краской элемента в реальном масштабе времени. Затем, исходя из сведений о поверхности объекта, блок управления выбирает код цвета, который хранится в системной памяти как соответствующий неким координатам, и отправляет строго синхронизированные команды наложения цвета отдельным форсункам для нанесения краски. Как только виртуальный цветовой пиксель полностью нанесен на поверхность объекта, этому пикселю приписывается, например, атрибут «готово», происходит переключение в пассивный режим или выбирается такой код цвета, ввиду интенсивности которого наложение цвета выполнятся не будет. Таким образом можно избежать непреднамеренного многократного наложения цвета на отдельный точечный участок.
В процессе нанесения краски каждый точечный участок поверхности объекта по меньшей мере один раз должен быть пройден головкой нанесения краски. Благодаря интегрированному вычислению координат непрерывного движения устройства не требуется, потому что в каждый момент времени устройство сравнивает действительные координаты с хранящейся в памяти информацией об изображении и подает команду запуска для нанесения краски только в том случае, если краска должна быть нанесена на данную область и это не было уже произведено на предыдущем шаге устройства.
Измерение координат положения устройства нанесения краски может быть произведено разнообразными способами при использовании разных систем измерения координат, как показано на Фиг.2. Такие системы могут быть разделены на две категории.
Системы измерения, которые согласно настоящему описанию могут быть отнесены к первой измерительной системе, измеряют координаты подвижных элементов относительно фиксированных ориентиров, в данном случае называемых сателлитами, являющихся также частью первой измерительной системы. Подвижные элементы первой измерительной системы могут быть включены в конструкцию устройства нанесения краски. Одним из свойств первой измерительной системы является наличие взаимной видимости (визуальной передаче данных) между сателлитами и подвижными элементами. Взаимная видимость может быть нарушена присутствием вблизи устройства строительных лесов, карнизов, веток, в результате чего считывание координат прерывается.
Системы измерения, которые в рамках настоящего описания относятся к второй измерительной системе, производят измерение перемещений устройства нанесения краски, например, при помощи датчиков, которые включены в конструкцию устройства нанесения краски и не используют фиксированные ориентиры. Например, это могут быть датчики линейного и углового ускорения, датчики скорости вращения, датчики скорости, магнитометры, инклинометры и датчики визуализации изображения, которые исследуют небольшую площадь поверхности объекта, с которой начинается расчет перемещений, например, корреляционным способом. Измерительные способы второй измерительной системы характеризуются быстротой, неспособностью к считыванию абсолютных координат и чувствительностью к отклонениям.
Требования к точности считывания координат высоки: допуская, что абсолютная разрешающая способность изображения составляет 0,5 мм в диапазоне 10 метров, относительная точность будет 50 промиль. Вместе с тем требуется, чтобы устройство нанесения краски могло перемещаться достаточно быстро в любой точке поверхности, так чтобы всегда имелась возможность измерения координат устройства с необходимой скоростью.
Некоторые способы измерения, используемые в соответствии с первой измерительной системой, могут обеспечить только низкую скорость измерений. В результате информация о координатах не может быть доступна постоянно, особенно в случае нарушенной видимости между сателлитами и подвижными элементами. С другой стороны, более быстрые способы, используемые второй системой измерений, применяются для опережения передвижения на короткие промежутки времени. Очевидно, что совмещение обоих способов позволяет охватить поверхность объекта полностью с одной стороны и позволяет реализовать более высокую скорость подачи (подвода) с другой стороны.
Рассмотрим устройство нанесения краски, управляемое оператором вручную. Действия по управлению устройством заключаются в следующем, см. Фиг.10.
Оператор приводит устройство нанесения краски в контакт с поверхностью объекта, прижимая его к поверхности. Когда по команде оператора начинается процесс наложения цвета, прежде всего проверяется наличие в первой измерительной системе данных о координатах. Для этого необходимо наличие взаимной видимости между соответствующими элементами первой измерительной системы. Если это условие не выполняется, то оператор должен быть оповещен об этом отрицательным сообщением или отсутствием положительного сообщения и проинструктирован о том, что устройство должно перемещаться по поверхности объекта до тех пор, пока первая система измерения не предоставит действительные координаты. Эти координаты используются системой нанесения краски и инициализации второй измерительной системы. Инициализация может означать простую установку датчиков перемещения в исходное состояние. Далее следуют вычисления координат, основанные на имеющихся данных об измерениях, предоставленных первой и второй измерительной системами. В данном случае сразу после инициализации вычисленные координаты становятся идентичными координатам первой измерительной системы. Ошибка позиционирования оценивается и передается программе проверки диапазона для принятия решения о возможности нанесения краски. Если ошибка позиционирования превышает допустимый порог, наложение цвета прекращается и повторяется вышеописанный процесс нахождения исходных координат. Обычно предполагаемая ошибка позиционирования не превышает допустимый порог, таким образом, процесс нанесения краски не прерывается и продолжается считывание новых данных о координатах. Описанный процесс происходит настолько быстро, что устройство нанесения краски успевает передвигаться в соответствии с собственной скоростью перемещения. Таким образом, возникает ошибка позиционирования, обусловленная упомянутым передвижением, а также тем, что каждая головка, наносящая краску, также создает некую задержку при перенесения краски на поверхность. Вследствие этого возникает необходимость корректировки полученной ошибки позиционирования, например, путем смещения координат. На практике это означает, что головка наложения цвета для нанесения краски получает такие коды цветов из пар соответствия «цвет - координаты», которые располагается с опережением действительных координат реального масштаба времени. В целом, смещение координат является функцией скорости и ускорения. Рекомендуется также дополнительно проводить измерение и проверку значения ускорения устройства перед нанесением краски в целях автоматического предотвращения нанесения краски во время толчкообразного перемещения. После нанесения краски проверяют, находится ли первая измерительная система в действительных координатах. Координаты могут быть неверными, если нарушена видимость, как было объяснено выше, или если скорость измерения координат первой измерительной системы ниже, чем фактическая цикличность, т.е. скорость работы системы. Если от первой измерительной системы получены новые данные, то вычисления текущих координат могут основываться как на данных о текущих координатах, так и на данных о предшествующих координатах. Если такое невозможно, то оператор будет проинформирован сообщением о том, что последующие вычисления координат будут основаны на данных об измерениях, полученных только от второй измерительной системы, и сведениях о предшествующих координатах. В обоих случаях перед запуском команды нанесения краски проводят расчет ошибки позиционирования и ее оценку. Очевидно, что во время перемещения устройства нанесения краски в область с нарушенной видимостью, ошибка позиционирования возрастает от цикла к циклу и, в результате, нанесение краски прекращается автоматически.
На основе полученных сообщений оператор способен распознать области, в которых возникают проблемы видимости, связанные с работой первой измерительной системы. Если оператор определил вышеупомянутую область, он получает инструкцию привести устройство нанесения краски в контакт с поверхностью объекта в точке, координаты которой известны, и перемещать устройство в этой области кратчайшим или наискорейшим путем. В случае слишком обширной области, когда повторяющиеся действия не приносят результата в виде нанесения краски, оператору рекомендуется установить дополнительные ориентиры первой измерительной системы.
Список рисунков:
Фиг.1: Подготовительная работа
Фиг.2: Подробная схема системы
Фиг.3: Головка нанесения краски
Фиг.4: Расширенная головка нанесения краски
Фиг.5: Первый пример реализации первой измерительной системы
Фиг.6: Второй пример реализации первой измерительной системы
Фиг.7: Ориентир
Фиг.8: Третий пример реализации первой измерительной системы
Фиг.9: Пример реализации системы нанесения краски с использованием первой измерительной системы согласно Фиг.8.
Фиг.10: Алгоритм управления
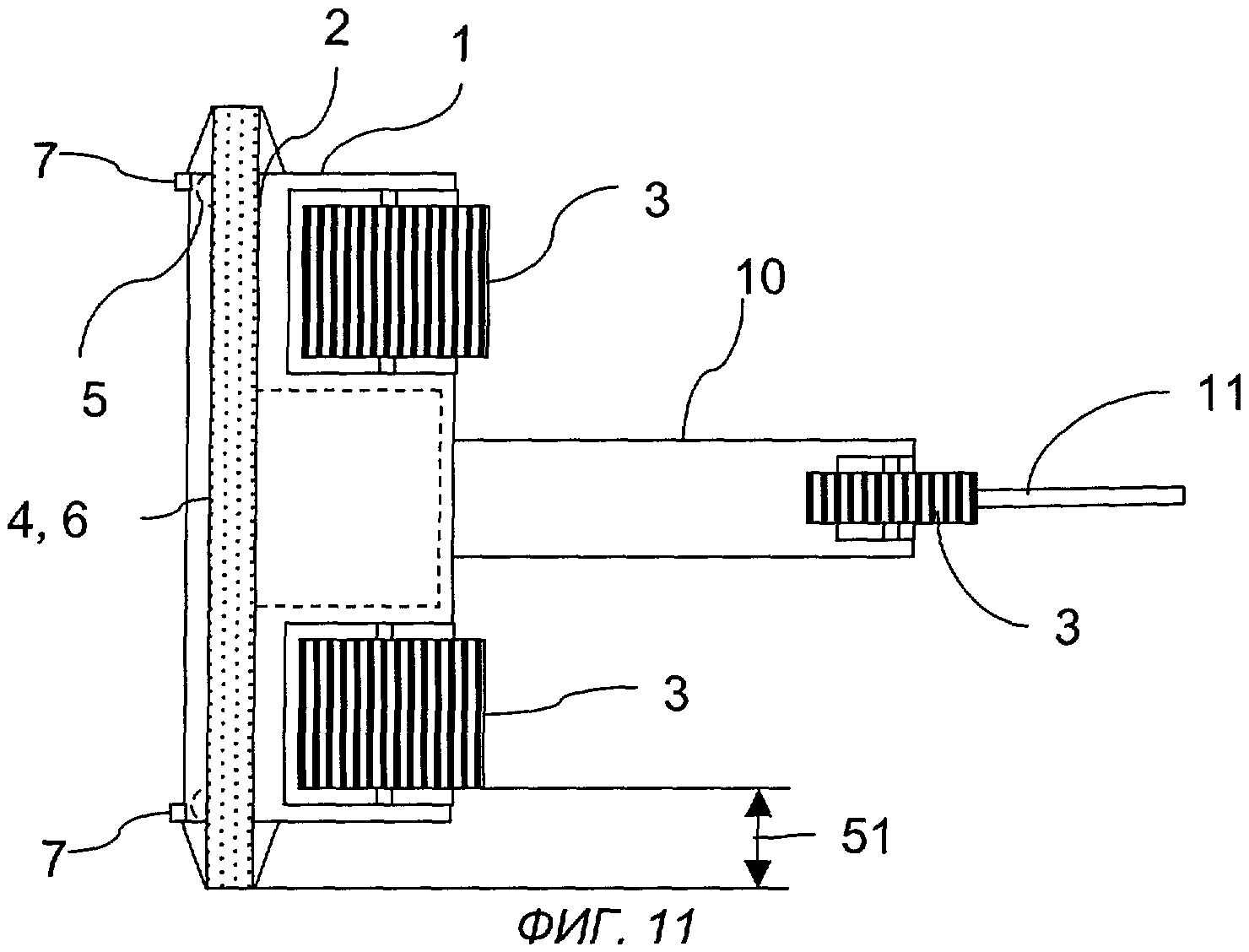
Фиг.11 и Фиг.12: Первый пример реализации устройства нанесения краски
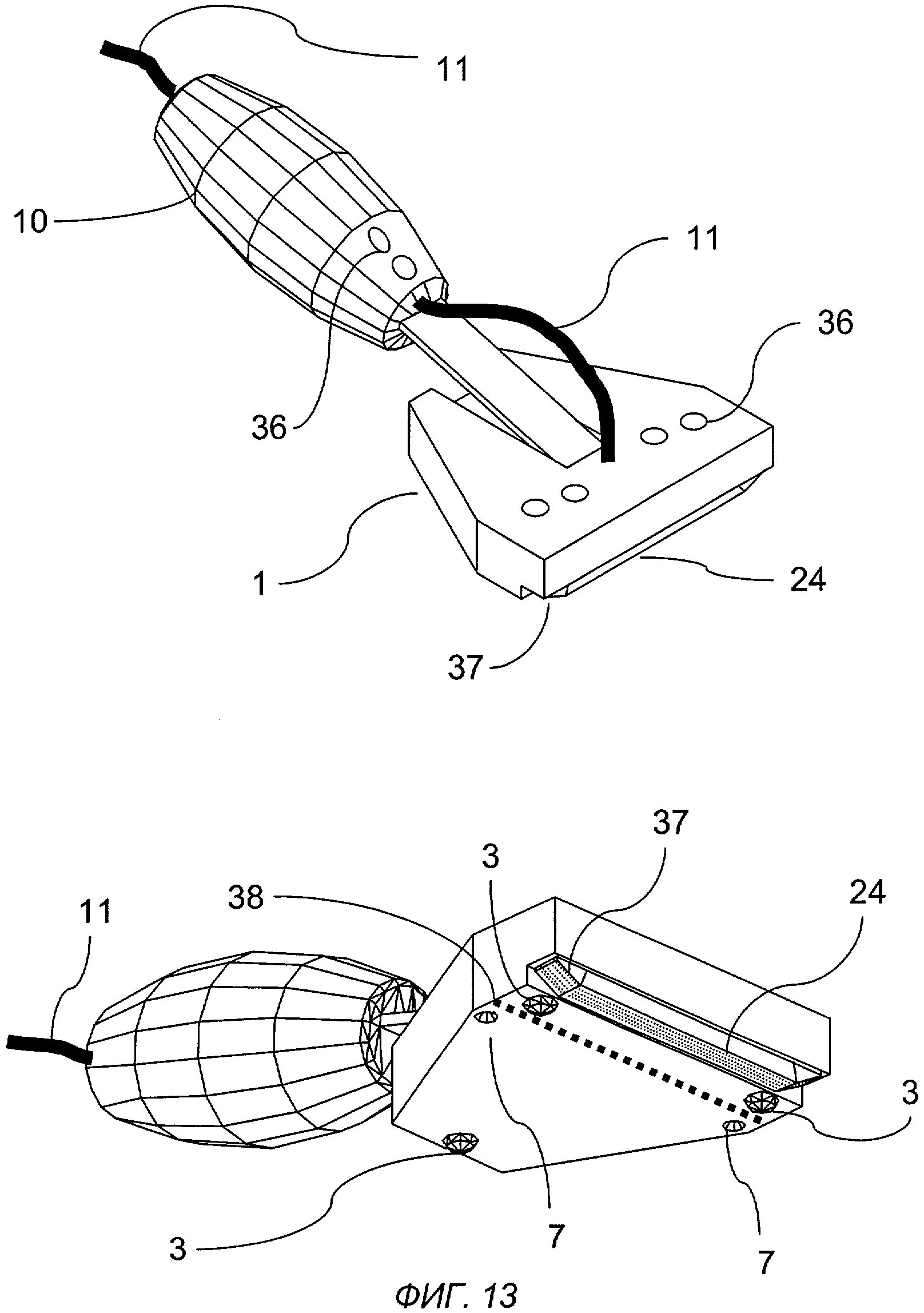
Фиг.13: Второй пример реализации устройства нанесения краски
Фиг.14: Третий пример реализации устройства нанесения краски
Фиг.15: Дистанционное управление форсунками нанесения краски
Фиг.16: Нанесение краски с использованием устройства нанесения краски, приведенного на Фиг.14
Фиг.17: Система окрашивания фасадов с использованием троса для подачи устройства
Фиг.18: Автономная роботизированная система
В начале работы оператор устанавливает в заданных координатах сателлиты, являющиеся подсистемой первой измерительной системы, как показано в примерах реализации на Фиг.2, Фиг.5, Фиг.6 и Фиг.8. Сателлиты определяют исходную систему координат. Для функционирования первой измерительной системы требуется наличие взаимной видимости между устройством нанесения краски и минимально необходимым числом сателлитов. Как правило, это требование может выполняться не во всех точках поверхности, однако путем установки большого количества сателлитов можно оптимизировать зону охвата поверхности объекта. Рекомендуется устанавливать сателлиты, когда геометрические особенности поверхности объекта уже проанализированы. Благодаря этому запись данных о геометрии и нанесение краски могут быть выполнены в одной и той же системе координат.
Общим признаком вышеуказанных примеров реализации первой измерительной системы является использование для измерения координат линейного коротковолнового излучения, такого как световые волны, инфракрасное излучение, микроволновое или ультразвуковое излучение. Координаты могут быть вычислены известными способами исходя из измеренных углов или общего затраченного времени. Некоторые из известных способов в литературе называются способами «оптического слежения». Для объяснения некоторые варианты представлены ниже.
Фиг.5 является эскизом варианта измерительной системы, содержащей ряд сателлитов, находящихся в заданном местоположении. Используя устройства считывания координат, сателлиты измеряют свои угловые координаты относительно источника модулируемого света, расположенного на устройстве нанесения краски. Данные передаются микропроцессору, который вычисляет координаты.
Фиг.6 описывает вариант фотометрической измерительной системы с одной или более камерой и/или одной или более инфракрасной камерой. Координаты устройства нанесения краски определяются путем численного выделения признаков и применения методик локализации по отношению к известным визуальным характеристикам устройства нанесения краски. Эта процедура сильно упрощается, если поверхность объекта и/или устройство нанесения краски содержат светоиспускающие, отражающие или поглощающие (например, цветные) ориентиры. Фиг.7 иллюстрирует один из примеров ориентира. Более того, для записи данных о цветовых особенностях поверхности объекта хорошо подходит фотометрическая система, которую можно использовать, например, для настройки цвета.
Показанный на Фиг.8 пример реализации первой измерительной системы содержит лазерную систему сканирования. Она содержит лазер (оптический квантовый генератор) 32, устройство 33 отклонения пучка и интегрированный фотоэлектрический измерительный преобразователь 34. Пучок считывается согласно заданному временному маршруту по поверхности объекта 12 и устройству 1 нанесения краски. Излучение 31 обратного рассеяния записывается фотоэлектрическим измерительным преобразователем 34, и изображение воспроизводится на поверхности объекта устройством нанесения краски. Кроме того, в данной системе могут использоваться также вышеуказанные высококонтрастные ориентиры.
В примере реализации системы, представленной на Фиг.8, устройство нанесения краски содержит дополнительные световые датчики, см. Фиг.9. В данном примере два ряда фотоэлектрических измерительных преобразователей 35 определяют точное время пересечения самих преобразователей лазерными пучками, таким образом, позволяя определить координаты устройства нанесения краски относительно известного временного маршрута лазерного пучка.
В то время как вышеприведенные примеры хорошо известны специалистам как способы измерения по принципу «снаружи - внутрь», следует отметить, что первая измерительная система также может функционировать в соответствии с известными способами измерения по принципу «изнутри-наружу», при этом функциональное направление меняется на обратное.
Более того, к числу способов, хорошо подходящих для использования в первой измерительной системе, также могут быть отнесены способы измерения координат, базирующиеся на задержке распространения сигнала, на эффекте Доплера и на измерении интерференции.
Вторую измерительную систему используют для навигации перемещений в случаях, когда первая измерительная система неспособна сообщать данные о координатах с достаточной скоростью ввиду, как правило, свойственного этой системе низкого темпа измерений или ввиду нарушенной взаимной видимости между устройством нанесения краски и критическим числом сателлитов. Помимо известных способов, могут быть задействованы датчики для измерения одной или более линейных и/или угловых скоростей и/или одного или более линейного и/или углового ускорения.
Обычно эти устройства не могут выполнять абсолютное считывание координат.
Дополнительная информация для вычисления координат может быть получена с помощью инклинометров и/или магнитометров. Дальнейшей возможностью получения информации о координатах является запись данных о поверхности объекта при помощи фотоэлектрических измерительных преобразователей, таких как сканирующее устройство или камера, с последующей обработкой данных для выделения признаков. Подходящими признаками могут быть, например, такие как уже записанная часть изображения, если она является высококонтрастной, эталонный рисунок или конструктивные признаки, например границы изображения. Улучшение качества может быть достигнуто путем определения кода цвета поверхности до и после нанесения краски и непрерывного расчета необходимого количества краски с использованием алгоритма управления.
На Фиг.11 и Фиг.12 показан первый пример реализации устройства нанесения краски в разных проекциях. Инерциальная измерительная система 6 и датчики скорости 7 предоставляют данные о перемещении в дополнение к данным первой измерительной системы, представленной ориентиром 5. Инерциальная измерительная система содержит, например, датчик угловой скорости вращения для измерения частоты вращения устройства нанесения краски вокруг оси, перпендикулярной поверхности объекта, и датчик линейного ускорения, измеряющий ускорение в направлении перемещения. Датчик давления позволяет контролировать давление подачи краски. Массив элементов нанесения краски выполнен таким образом, чтобы обеспечить боковой вынос роликов 3 на некоторое расстояние, например на расстояние 51, как показано на Фиг.11. Возможность выноса удобна в случае медленно сохнущей краски, потому что позволяет производить окрашивание, не приводя ролики 3 в контакт с ранее нанесенной, еще непросохшей краской.
На Фиг.13 представлен второй пример реализации устройства нанесения краски 1 согласно изобретению, которое, в частности, подходит для выполнения исправлений или добавления завершающих штрихов. Устройство содержит скользящие элементы 3 для перемещения устройства по поверхности объекта и головку 24 для нанесения краски, которая содержит форсунки 37 нанесения краски, имеющие фаски на боковых ребрах. Благодаря фаскам краска может быть нанесена на вогнутые границы и углы. Устройство 38 сканирования изображения, направленное к поверхности объекта, позволяет считывать часть изображения и, таким образом, определять координаты устройства по отношению к изображению. Различные дисплеи и интерфейсы для работы с оператором позволяют контролировать работу устройства.
При перемещении устройства нанесения краски по поверхности объекта в контакте с этой поверхностью необходимо, чтобы в высокой степени обеспечивалась точность расстояния и угла между форсунками нанесения краски и поверхностью объекта. Это может быть достигнуто, например, путем использования колесиков, роликов, а также малярных валиков и скользящих элементов.
На Фиг.14 показан третий пример реализации устройства 1 нанесения краски, которое обеспечивает автоматическое регулирование расстояния между элементами нанесения краски и поверхностью объекта и дополнительно позволяет наносить влажный первый слой свежей краски встроенным малярным валиком 40. Устройство позволяет выполнять нанесение краски по принципу малярного валика. Соосно втулке ролика располагается серводвигатель 41 для приведения в действие одного из блоков устройства 1 нанесения краски, содержащего форсунки 2, относительно рукоятки 43, имеющей регулировку подачи жидкости. В положении 42 происходит нанесение первого слоя, например, эмульсионной краски традиционным методом. После нанесения первого слоя краски на некоторый участок поверхности объекта та часть устройства нанесения краски, которая имеет в своем составе форсунки 2, поворачивается по направлению к поверхности объекта, приводимая в движение серводвигателем. Постоянное расстояние между форсунками нанесения краски и поверхностью объекта поддерживается благодаря использованию дистанциометрических датчиков 39, см. схему управления на Фиг.15. В описанном примере реализации поперечные размеры головки нанесения краски имеют боковой вынос за границы ролика 40.
Фиг.16 иллюстрирует процесс нанесения цвета с использованием устройства, показанного на Фиг.14. Первый слой и декоративный слой могут быть нанесены последовательно или одновременно. Для предотвращения размывания вынос 51 необходимо постоянно поддерживать.
На Фиг.17 представлен пример реализации автономного роботизированного устройства нанесения краски на фасады. Устройство нанесения краски подвешено на тросе, перекинутом через блок, что позволяет осуществлять вертикальное перемещение. Горизонтальное перемещение осуществляется передвижением блока по горизонтальным направляющим.
На Фиг.18 изображен пример реализации автономного роботизированного устройства нанесения краски с вытяжным механизмом 50 пониженного давления. Механизм, автоматический привод и управляемость позволяют осуществлять свободное перемещение по вертикальным поверхностям. Встроенный блок 4 управления приблизительно определяет траекторию устройства. На основе данных измерения координат и сведениях о пройденном участке траектории устройство нанесения краски автоматически вычисляет последующий участок траектории. Для осуществления перемещения устройства по поверхности предпочтительно используют три колеса 3, которые дополнительно могут быть управляемыми.
Фиг.3 схематично изображает головку 24 устройства нанесения краски, которое содержит три ряда распылительных форсунок 20, 21, 22 для нанесения различных основных цветов. Краска поступает по впускному трубопроводу из внешних баков. На Фиг.4 изображена головка 24 нанесения краски, которая содержит дополнительные элементы 23 нанесения краски для нанесения первого слоя или переходного слоя.
Существуют многочисленные технические возможности реализации массивов нанесения краски. Например, форсунки нанесения краски могут быть выполнены в соответствии с различными способами, известными из уровня техники. В качестве подходящих методик можно упомянуть такие, как, например, распыление сжатого воздуха, распыление под низким давлением, безвоздушное распыление, распыление воздушной смеси, сверхкритическое распыление и горячее распыление.
С тем же успехом при работе устройства нанесения краски могут применяться способы распыления капель по требованию, посредством которых формируются отдельные капли и катапультируются на рабочую поверхность.
Для нанесения краски предпочтительны быстросохнущие краски или термокраски. Если их применение невозможно, то предпочтительно использовать краски, которые быстро высыхают под воздействием тепла, ультрафиолетового излучения или воздушной струи. В этих случаях в конструкцию устройства нанесения краски должно входить приспособление, прикрепленное или установленное на стороне днища, обеспечивающее быстрое высыхание краски, например ультрафиолетовая лампа, воздушный вентилятор или тепловой излучатель.
Согласно варианту исполнения последующие слои наносятся аналогично по такой же технологической операции, например, первый слой в многослойном красочном покрытии, или переходный слой, или слой, закрепляющий цветной слой химически. В этих целях могут использоваться элементы массива нанесения краски или же дополнительные элементы нанесения краски, размещенные спереди или сзади форсунок нанесения краски в соответствии с направлением перемещения.
Первый слой в многослойном красочном покрытии может быть выполнен из эмульсионной краски, в которую внедрены гранулы краски, либо в то время, пока эмульсионная краска и еще влажная, либо в результате частичной растворимости краски в процессе нанесения.
Перечень обозначений:
1 - устройство нанесения краски; 2 - массив элементов нанесения краски; 3 - ролики/выдвижные устройства; 4 - микрокомпьютер; 5 - источник света, источник тепла; 6 - инерциальная измерительная система как часть второй измерительной системы; 7 - оптический датчик скорости как часть второй измерительной системы; 8 - резервуар с краской; 9 - батарея; 10 - рукоятка; 11 - подача жидкости; 12 - поверхность объекта; 13 - сателлит первой измерительной системы; 14 - устройство считывания координат или камера; 15 - оптические линзы; 16 - препятствие; 17 - пучок модулируемого света 1; 18 - пучок модулируемого света 2; 19 - крепление; 20 - форсунка нанесения краски первого основного цвета; 21 - форсунка нанесения краски второго основного цвета; 22 - форсунка нанесения краски третьего основного цвета; 23 - элементы нанесения краски для нанесения первого или последнего слоя; 24 - головка нанесения краски; 25 - ультрафиолетовый источник света, ускоряющий высыхание краски; 26 - ориентир; 27 - чип камеры, проецируемое изображение; 28 - подслой, светопроницаемый; 29 - контрольное расстояние; 30 - излучаемый лазерный пучок; 31 - рассеянный пучок; 32 - оптический квантовый генератор; 33 - устройство отклонения пучка; 34 - фотоэлектрический измерительный преобразователь; 35 - светоотражающий ориентир или массив фотоэлектрического измерительного преобразователя; 36 - дисплей, интерфейс пользователя; 37 - головка нанесения краски, наклоненная; 38 - сканер изображения; 39 - дистанционометрический датчик; 40 - малярный валик; 41 - соосный серводвигатель; 42 - местоположение нанесения основного слоя; 43 - рукоятка, включающая устройство питания; 44 - свежий основной слой; 45 - исходная поверхность; 46 - основной слой; 47 - декоративный слой краски; 48 - горизонтальные направляющие; 49 - аппарат, включающий шкив, встроенный привод и систему контроля; 50 - вытяжной механизм пониженного давления; 51 - вынос; 52 - клапанный блок; 53 - датчик давления.
Реферат
Данное изобретение относится к способу нанесения красок или лаков с помощью устройства нанесения краски путем нанесения цветного рисунка на поверхности зданий, общественных и гражданских инженерно-технических сооружений в соответствии с предварительно полученной цифровой моделью изображения, наложенной на цифровой объект, представляющий собой реальную поверхность объекта. Согласно формуле изобретения устройство нанесения краски перемещают по поверхности объекта, приводя в контакт с нею, непрерывно измеряют или вычисляют координаты устройства благодаря использованию датчиков перемещения и наносят краску в соответствии с вышеуказанным исполнением в зависимости от полученных таким образом координат. Нанесение краски устройством автоматически прекращается в случае, если координаты по отношению к заданному допустимому порогу отклонения координаты не могут быть определены в достаточной мере точно или если краска или лак уже были целиком нанесены на область координат наносимых краской элементов. Техническим результатом изобретения является обеспечение возможности быстрого и надежного нанесения имеющихся цифровых информационных изображений на любые поверхности объектов. 2 н. и 12 з.п. ф-лы, 18 ил.

Комментарии