Воздушная сеть питания для подвижных горных машин - RU2619741C2
Код документа: RU2619741C2
Чертежи










Описание
Настоящая заявка испрашивает приоритет предварительной Заявки США № 61/593073, поданной 31 Января 2012 года, полное содержание и раскрытие которой включено в данную заявку посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к подвижному электрическому машинному оборудованию, а более конкретно к воздушной сети питания, соединенной с подвижным электрическим машинным оборудованием.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Тяжелое горное машинное оборудование, используемое при разработке открытым способом и подземной добыче «в твердых породах», обычно приводится в действие посредством дизельных двигателей. Долгое время существует потребность снижения рисков для здоровья, связанных с работой подобных дизельных двигателей в ограниченных вариантах применения при разработке открытым способом и подземной добыче. Конкретно, дизельные двигатели выбрасывают твердые частицы, вредные для людей, создают высокие уровни шума и существенно добавляют «тепловую нагрузку» в подземной шахте. Кроме того, высокая стоимость дизельного топлива и обслуживания дизельного двигателя представляют дополнительные недостатки.
В общепринятых системах, питаемых по воздушной сети, таких как системы рельсовой транспортировки, используют пантографы, которые скользят по воздушному проводу. Данные системы требуют использования направляющей на основе рельса для удерживания подвижной машины (локомотива) в пределах приемлемой близости к воздушным проводам (проводникам). Делалась попытка осуществления пантографных систем с карьерными самосвалами, но подобные пантографные системы не включают в себя каких-либо «переключающих» средств для переключения направления движения по дороге или рельсу, иных чем опускание пантографа, возврата к дизельному приводу для осуществления поворота, а затем повторного зацепления пантографа для перехода снова на воздушное питание.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Согласно варианту осуществления изобретения предоставлена воздушная конструкция питания для приведения в движение и направления транспортного средства. Воздушная конструкция питания включает в себя роликовый токоприемник, множество по существу трубчатых и параллельных сегментов, формирующих путь, вдоль которого проходит роликовый токоприемник, источник питания, соединенный с трубчатыми сегментами, и кабель, соединенный с роликовым токоприемником и сконфигурированный с возможностью прикрепляться к транспортному средству, движущемуся по поверхности. Кабель механически и электрически соединяет транспортное средство с роликовым токоприемником.
Согласно еще одному варианту осуществления изобретения транспортное средство сконфигурировано с возможностью соединяться с воздушной конструкцией питания. Транспортное средство включает в себя шасси и кабель, соединенный с шасси и сконфигурированный с возможностью механического и электрического соединения транспортного средства с воздушной конструкцией питания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 представляет собой вид в перспективе сверху подвижной горной машины, соединенной с воздушной сетью питания, согласно варианту осуществления изобретения.
Фиг. 2A представляет собой частичный вид в перспективе справа подвижной горной машины, соединенной с воздушной сетью питания Фиг. 1.
Фиг. 2B представляет собой вид в плане специального соединителя для подвижной горной машины Фиг. 1.
Фиг. 2C представляет собой вид в перспективе альтернативного варианта осуществления подвижной горной машины.
Фиг. 3A представляет собой вид в перспективе роликового токоприемника для воздушной сети питания согласно варианту осуществления изобретения.
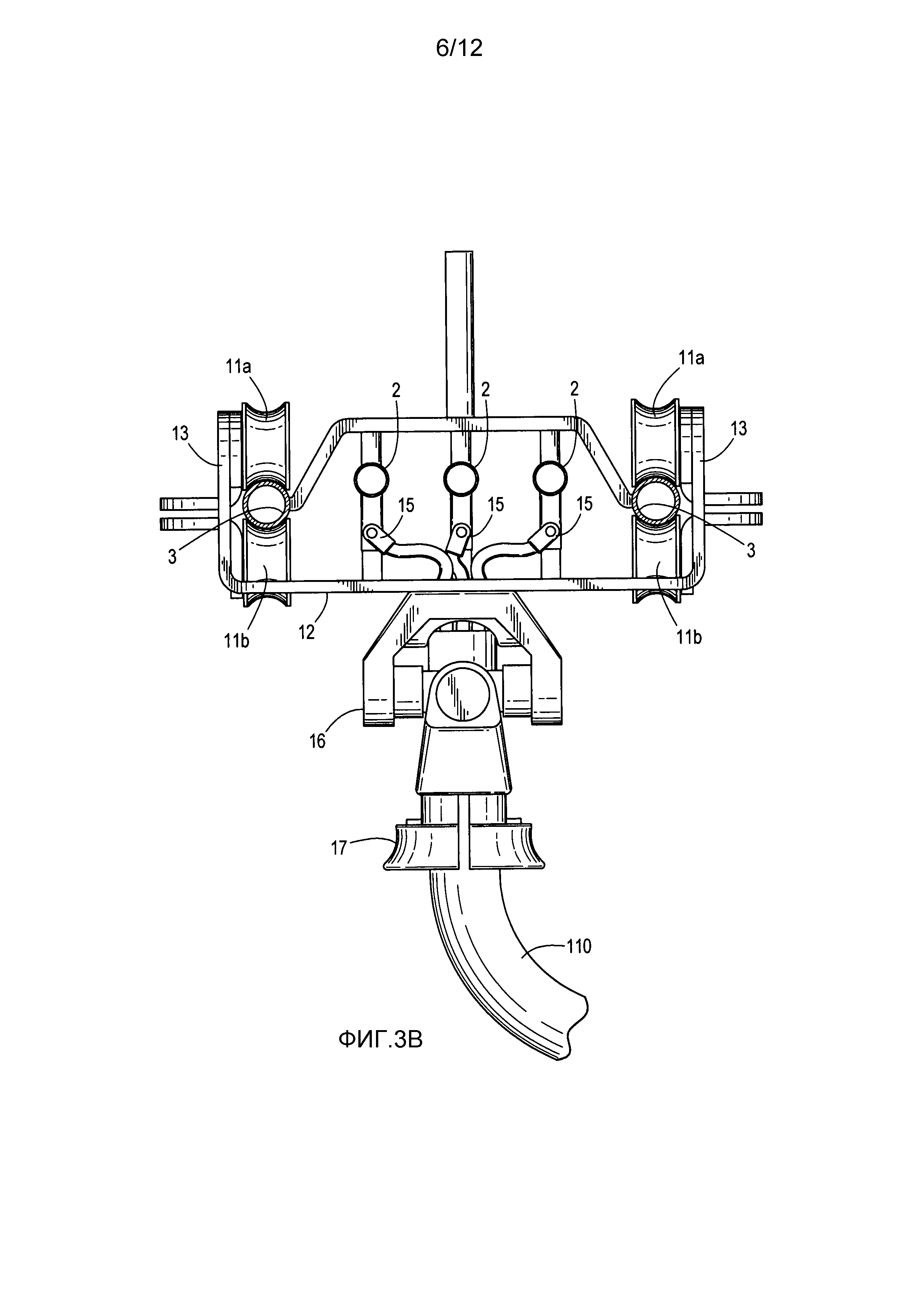
Фиг. 3B представляет собой вид в плане Фиг. 3A.
Фиг. 4 представляет собой развернутый вид в плане воздушной сети питания.
Фиг. 5 представляет собой вид в перспективе воздушной сети питания, включающей в себя механизм переключения.
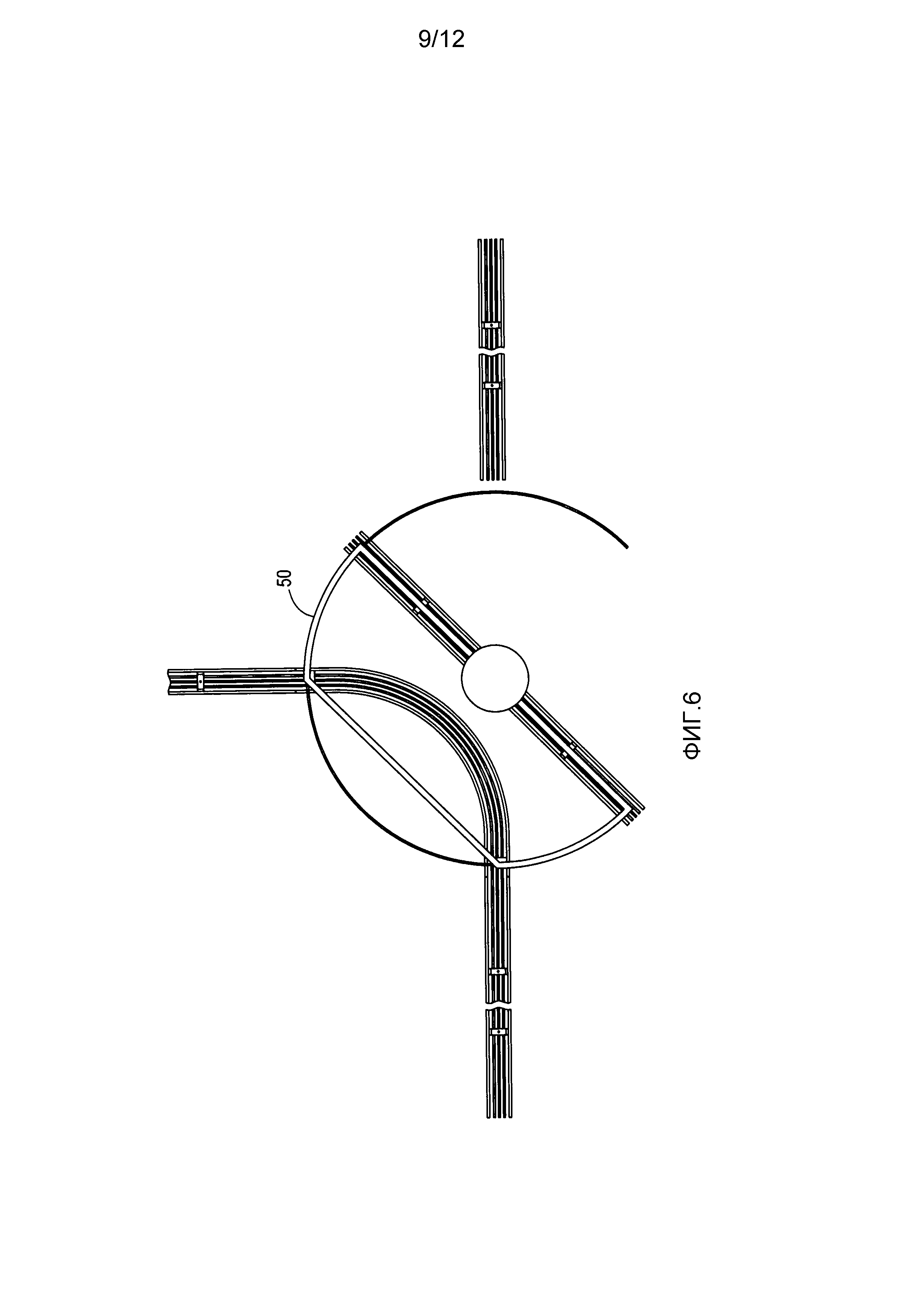
Фиг. 6 представляет собой вид в плане сверху альтернативного варианта осуществления воздушной сети питания в поворотной конфигурации.
Фиг. 7 представляет собой вид перспективе Фиг. 6.
Фиг. 8 представляет собой вид в плане сверху альтернативного варианта осуществления воздушной сети питания с Фиг. 6 в прямой конфигурации.
Фиг. 9 представляет собой вид в перспективе с Фиг. 8.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
Перед подробным пояснением каких-либо вариантов осуществления изобретения следует понять, что применение изобретения не ограничено деталями конструкции и расположением составных элементов, изложенными в последующем описании или изображенными на последующих чертежах. Изобретение допускает другие варианты осуществления и практического использования или выполнения различными способами. Также следует понять, что фразеология и терминология, используемые в данной заявке, предназначены для цели описания и не должны рассматриваться в качестве ограничения. Использование «включающий в себя», «содержащий» или «имеющий» и их вариантов в данной заявке подразумевает охват пунктов, перечисленных после этого, и их эквивалентов, а также дополнительных пунктов. Термины «установленный», «соединенный» и «связанный» используются в широком смысле и охватывают как непосредственные, так и опосредованные крепление, связь и соединение. Дополнительно, «соединенный» и «связанный» не ограничены физическими или механическими связями или соединениями и могут содержать электрические связи или соединения либо непосредственные, либо опосредованные. Также электронные сообщения и уведомления могут быть выполнены с использованием каких-либо известных средств, включая прямые соединения, беспроводные соединения и т.д.
Фиг. 1 и 2 изображают подвижную горную машину 100 (такую как погрузочно-доставочное транспортное средство, далее «LHD») для добычи полезных ископаемых. LHD 100 электрически и механически соединена с воздушной конструкцией 1 питания через роликовый токоприемник 10. Воздушная конструкция 1 питания может представлять собой отдельно стоящую конструкцию или может быть подвешена на потолке шахты.
Как изображено на Фиг. 2A и 3, воздушная конструкция 1 питания включает в себя множество по существу трубчатых проводников 2 и рельсовых сегментов 3. Внешними трубами являются рельсовые сегменты 3, вдоль которых проходят направляющие ролики 11 роликового токоприемника 10, а внутренними трубами являются металлические токопроводящие трубы 2, которые формируют проводники для 3-фазной сети 20 питания переменного тока. Сеть 20 питания может быть множества типов, т.е. переменного тока, постоянного тока, 3-фазного переменного тока и т.д. Металлические токопроводящие трубы 2 могут быть сформированы из меди или другого проводящего металла. Проводники 2 и рельсовые сегменты 3 формируют конструкцию 1 сети питания, которая соединена с LHD 100 прицепным кабелем 110.
Как изображено на Фиг. 2A и 3, прицепной кабель 110 свисает с роликового токоприемника 10 и подсоединяет питание от сети 20 питания к LHD 100. Прицепной кабель 110, наряду с подсоединенным роликовым токоприемником 10 и специальным соединителем 120 (дополнительно обсуждающимся ниже) на LHD 100, сохраняет землю или поверхность пола шахты свободной от кабелей, поэтому более легко может быть задействовано другое оборудование, особенно другое беспроводное оборудование.
Как лучше всего изображено на Фиг. 2B, прицепной кабель 110 соединен с шасси 101 LHD 100 через специальный соединитель 120, выполненный с возможностью поворота на 360 градусов. Специальный соединитель 120 обеспечивает возможность безопасного удаления прицепного кабеля 110 без вреда для LHD 100, роликового токоприемника 10, конструкции 1 питания или персонала, связанного с проведением горных работ. Соединитель 120 включает в себя подпружиненный шар 121, который действует в фиксаторе 122 для удерживания прицепного кабеля 110 в гнезде 123. Однако при достаточном тяговом усилии, прицепной кабель 110 может быть вытянут из соединителя 120. Способность прицепного кабеля 110 легко высвобождаться из соединителя 120 является важной в случае нависания роликового токоприемника 10 и для предотвращения сноса сегментов 2, 3 воздушной сети питания в случае, когда LHD 100 выходит за пределы достижения кабеля 110.
В альтернативном варианте осуществления в дополнение или вместо предоставления возможности высвобождения прицепного кабеля 110 из соединителя 120 в случае неисправности, роликовый токоприемник 10 включает в себя средство управления для обесточивания питания через кабель 110 к LHD 100. Средство управления может содержать автоматический выключатель, управляющий трансформатор, замыкатель, прерыватель замыкания на землю или логический контроллер, установленный на роликовом токоприемнике. Средство управления также может включать в себя датчик угла поворота или датчик натяжения, который показывает положение или угол прицепного кабеля 110 (т.е. что кабель 110 не висит по существу вертикально или протягивается под некоторым углом, превышающим предварительно определенный порог угла). Если датчик определяет, что угол кабеля 110 превышает минимальный порог угла, средство управления подает сигнал кабельному барабану 130 (дополнительно описанному ниже) размотать дополнительный кабель 110 или подает сигнал оператору включить тормоз LHD 100. Если кабельный барабан 130 отсутствует или если кабель 110 в кабельном барабане 130 достиг своего максимального выпуска, между шасси LHD 100 и основанием роликового токоприемника 10 может быть прикреплен дополнительный вытяжной кабель для указания, что кабель 110 находится при максимальном натяжении, изменяя, таким образом, информацию оператору по поводу торможения. Кроме того, автоматический выключатель или заземленная цепь конструкции 1 питания может прекращать подачу питания в сеть 1 в случае, если натяжение кабеля 110 достигает второго, более высокого порога.
Как изображено на Фиг. 2C и как обсуждалось выше, LHD 100 может включать в себя кабельный барабан, в котором хранится прицепной кабель 110. Наличие кабельного барабана 130 обеспечивает возможность LHD 100 перемещаться на большие расстояния, при этом оставаясь соединенной с воздушной конструкцией 1 питания. Например, прицепной кабель 110 является достаточно длинным для того, чтобы LHD 100 достигала других штреков, достаточно далеких для загрузки руды, или выполнения других требуемых задач, оставаясь соединенной с воздушной сетью питания 1 и исключающим свое запутывание. Кабельный барабан 130 может быть прикреплен где угодно на LHD или карьерном самосвале, например на передней стороне, изображенной на Фиг. 2C. Кабель 110 подается из барабана 130 через кабелепровод 131 вертикального протяжения, связанный с кабельным барабаном 130. Верхний участок кабелепровода 131 прикреплен к соединителю 120, предпочтительно на высоте приблизительно немного ниже высоты проводников 2 и рельсовых сегментов 3 воздушной конструкции 1 питания для минимизации помех со стороны прицепного кабеля 110 для других составных элементов или управляющих элементов LHD 110. Однако кабелепровод 131 может иметь другую высоту, которая требуется для различных операций.
[0026] Как обсуждалось выше, LHD 100 соединяется с конструкцией 1 питания через роликовый токоприемник 10, который проходит вдоль рельсовых сегментов 3 и который сообщается с конструкцией 1 питания. Как изображено на Фиг. 3A-3B, роликовый токоприемник 10 включает в себя основание 12, которое располагается под воздушной конструкцией 1 питания и, по существу, параллельно ей. Два фланца 13 поднимаются вверх от соответствующих боковых сторон основания 12 снаружи рельсовых сегментов 3. К внутренней стороне каждого фланца 13 прикреплены пара разнесенных верхних направляющих роликов 11a и нижний направляющий ролик 11b. Однако количество и разнесение верхних 11a и нижних 11b направляющих роликов может быть изменена. Нижние направляющие ролики 11b взаимодействуют с верхними направляющими роликами 11a с целью «сжимания» рельсовых сегментов 3, обеспечивая возможность роликовому токоприемнику 10 оставаться правильно сбалансированным на рельсовых сегментах 3, и таким образом, чтобы коммутаторы 15 (дополнительно обсуждающиеся ниже) оставались правильно выровненными с проводниками 2.
Продолжая со ссылкой на Фиг. 3A и 3B, роликовый токоприемник включает в себя коммутаторы 15, которые соединены с проводниками 2 сети через материал для коммутации, такой как графит. Затем прицепной кабель 110 соединяет коммутаторы 15 с LHD 100. Коммутаторы 15 могут включать в себя заземленную цепь от LHD 100, которая проходит через заземленные выводы в прицепном кабеле 110, а затем через ролики 11 токоприемника, которые расположены на внешних рельсах 3 воздушной сети 1. Вертлюг 16 «универсальное соединение» расположен на основании 12 роликового токоприемника 10, а для прикрепления прицепного кабеля 110 к роликовому токоприемнику 10 используется кабельный зажим 17. Прицепной кабель 110 свисает с зажима 17 и соединяется с соединителем 120, установленным на LHD 100.
Как изображено на Фиг. 4 и 5, варианты осуществления представленного изобретения также включают в себя переключающее устройство 30, обеспечивающее возможность движения от одного штрека шахты к другому. Со ссылкой на вид в плане Фиг. 4, вследствие того что сегменты 2, 3 воздушной сети питания включают в себя многочисленные проводники 2 (на Фиг. 4 изображены три) между двумя внешними трубчатыми рельсовыми сегментами 3, сегменты A, B, C могут быть механически передвинуты на место. Сегмент А выполнен с возможностью скольжения вправо и влево в направлении стрелок, изображенных на чертеже на виде в плане Фиг. 4, для создания прямого участка переключателя 30. Сегменты B и C скользят вперед и назад «через» главные линии пути под углом 45 градусов (в направлении соответствующих стрелок, изображенных на чертеже), а затем опускаются на место с образованием правого или левого поворота по мере того, как роликовый токоприемник 10 приближается справа на Фиг. 4.
В варианте осуществления, изображенном на Фиг. 5, перемещения выполняют с помощью изогнутой рукоятки 40, которая опускает отдельные сегменты на место. Однако перемещения сегментов могут быть выполнены с помощью салазок, кулачков, линейных исполнительных механизмов, ремней или других устройств, известных в данной области. Контроллер (не изображен) может быть использован для электронного управления механическим приведением в действие сегментов A, B, C. Устройство, аналогичное переключающему устройству 30, может быть использовано для LHD 100 для прохождения еще одной горной машины, при условии наличия достаточного промежутка в подземном или наземном проходе.
В альтернативном варианте осуществления вместо наличия отдельного механизма для соответствующих сегментов пути, подлежащих переключению на место, переключение деталей пути выполняет поворотный стол 50, изображенный на Фиг. 6-9. Поворотный стол 50 включает в себя по существу круглое внешнее кольцо 51 и опорный элемент 52, соединенный и проходящий между кольцом 51. Опорный элемент 52 соединяет кольцо 51 с прямым рельсовым сегментом и/или изогнутым рельсовым сегментом. Опорный элемент 52, изображенный на Фиг. 6-9, имеет, по существу, прямоугольную форму, с дугообразными продольными торцевыми сторонами 53, дугообразными торцевыми сторонами 53, совпадающими с кольцом 51. Опорный элемент 52 включает в себя основной элемент 54, расположенный на нем таким образом, чтобы поворотный стол 50 мог быть подвешен на потолке.
Поворотный стол 50 выполнен с возможностью вращаться, чтобы выровнить каждый изогнутый рельсовый сегмента для того, чтобы LHD 100 делала правый или левый поворот (Фиг. 6-7) или чтобы выровнить прямой рельсовый сегмент с фиксированными участками пути для того, чтобы LHD 100 двигалась прямо (Фиг. 8-9). При необходимости поворотный стол 50 может быть модифицирован для использования с четырехсторонним пересечением. Для регулирования вращения поворотного стола может быть использован контроллер (не изображен), имеющий датчик положения на валу двигателя и тому подобное.
Во время работы, по мере того как LHD 100 движется вдоль входов в штреки в подземной шахте или по специализированным дорогам при открытых разработках, прицепной кабель 110 тянет роликовый токоприемник 10 вдоль системы 1 воздушной сети питания, сохраняя таким образом возможность соединения с сетью 20 питания. LHD 100 может двигаться по кругу и поворачиваться полностью вокруг него без замыкания или соприкосновения с землей прицепного кабеля 110. Соединение с горной машиной 100 включает в себя «отключающий» соединитель 120 в случае, когда LHD 100 пытается двигаться дальше, чем будет позволять максимальное расстояние прицепного кабеля 110. Тогда подвижная горная машина 100 выполнена с возможностью двигаться вокруг штреков в подземной шахте за счет «буксирования» сзади своего роликового токоприемника 10, при этом, принимая питание от воздушной конструкции сети 1.
Воздушная сеть 1 питания для подвижных горных машин 100 согласно вариантам осуществления представленного изобретения использует горные машины 100 с электроприводом на поверхности и в подземных шахтах без использования соприкасающихся с землей прицепных кабелей и/или кабельных барабанов. Обычный прицепной кабель с кабельным барабаном изнашивается быстро и затрудняет проход многочисленных приводных машин с кабельными барабанами (которые не могут ехать через находящиеся под напряжением кабели). Воздушная система сети 1 устраняет данный безвыходный сценарий за счет предоставления переключателей 30 и пересечений, где машины могут расходиться друг с другом. Например, если две LHD 100 приближаются к перекрестку, обозначенному на Фиг. 3, одна снизу фигуры и одна с правой стороны фигуры, и обе пытаются направляться в верхнюю сторону фигуры, одна из LHD 100 может остановиться, подождать, пока другая проходит через перекресток, и затем продолжает позади первой. Если бы данные горные транспортные средства использовали «уложенные» прицепные кабели посредством установленного на машине кабельного барабана, вторая LHD 100 должна была бы ждать, пока первая 100 вернется и пройдет назад через переключатель в направлении, в котором она двигалась первоначально, перед тем, как вторая LHD 100 могла продолжать движение в направлении положения сверху фигуры.
Воздушная сеть 1 питания для подвижных горных машин 100 предлагает существенные преимущества для здоровья и безопасности над машинами с дизельными приводами за счет уменьшения или полного устранения зависимости от дизельного привода, так как все машины, соединенный с сетью, будут иметь электрический привод, например частотно-регулируемый электропривод (VFD) и/или электропривод с регулируемым магнитным сопротивлением (SRD). Использование данных технологий приводов с электронным управлением в сочетании с воздушной сетью 1 питания также при необходимости предлагает преимущество большей мощности и возможность «рекуперирования» мощности торможения обратно в сеть, оптимизируя, таким образом, энергетическую эффективность. Восстановление представляет собой процесс использования электрических встроенных в колеса двигателей в качестве генераторов для преобразования энергии замедления (торможения) и возврата ее назад с тем же самым напряжением и частотой для закачивания ее назад в сеть 1.
[0035] Несмотря на то что изобретение было подробно описано со ссылкой на некоторые предпочтительные варианты осуществления, в пределах объема правовых притязаний и сущности одного или более независимых аспектов изобретения в описанном виде существуют варианты и модификации.
Реферат
Группа изобретений относится к токоприёмникам для линий энергоснабжения транспортных средств с электротягой. Транспортное средство соединено с воздушной конструкцией питания для приведения в движение и направления транспортного средства. Транспортное средство включает в себя шасси и кабель. Кабель соединен с шасси и выполнен с возможностью механического и электрического соединения транспортного средства с воздушной конструкцией питания. Шасси включает в себя соединитель, выполненный с возможностью поворота на 360 градусов, при этом кабель соединен с шасси через соединитель. Воздушная конструкция питания включает в себя роликовый токоприемник, путь, вдоль которого проходит роликовый токоприемник, источник электроэнергии, соединенный с путем, и кабель. Путь формируют множество трубчатых и параллельных сегментов. Кабель соединен с роликовым токоприемником и выполнен с возможностью прикрепляться к транспортному средству. Технический результат заключается в уменьшении или полном устранении зависимости от дизельного привода для горных машин. 2 н. и 18 з.п. ф-лы, 12 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для подачи электроэнергии к управляемым передвижным установкам и поворотный круг контактной сети для этого устройства
Комментарии