Способ контроля состояния пипетки, способ пипетирования, пипетирующее устройство и узел всасывающей трубки для пипетирующего устройства - RU2518045C2
Код документа: RU2518045C2
Чертежи


Описание
Изобретение относится к способу контроля состояния пипетки, которая включает всасывающую трубку и наконечник пипетки, способам пипетирования с использованием такого способа, пипетирующему устройству и узлу всасывающей трубки для пипетирующего устройства, при помощи которых эти способы могут быть реализованы.
В аналитике, например, часто бывает необходимо с большой точностью дозировать очень небольшие объемы жидкости, при этом используют, как правило, пипетки. И при этом для автоматизированного способа пипетирования важно точно знать состояние пипетки, то есть знать, в частности, исправное функционирование или объем наполнения. Кроме того, может быть полезным знать момент времени, когда пипетка при приближении к жидкости контактирует с поверхностью жидкости.
Согласно способу, который описан в документе US 5428997, имеющий форму штырька конец ультразвукового датчика погружают в жидкость. Чтобы получить момент времени погружения, осуществляют наблюдение за ультразвуковой резонансной частотой. В другом документе US 2003/0200801 А1 описан способ, в котором на наконечнике пипетки предусмотрены два концентрических электрода, которые при контакте с жидкостью закорачивают и, таким образом, могут подавать сигнал о достижении поверхности жидкости. В других способах применяются токопроводящие пипеточные наконечники, емкость которых при погружении в жидкость изменяется.
Чтобы снизить риск загрязнения жидкости вследствие погружения, используют, например, сменные пипеточные наконечники. Особое исполнение соответствующих пипеточных наконечников, например, в форме токопроводящих наконечников или отдельных электродов приводит соответственно к высокой себестоимости.
Описанный в документе US 5705750 способ измеряет расстояние до поверхности жидкости путем вычисления времени прохождения отправленного ультразвукового импульса в направлении поверхности жидкости, для чего необходимо соответствующее измерительное устройство.
В документе US 5465629 описан погружной датчик, в котором воздушный столб внутри пипетки приводят в колебание. В зависимости от того, открыто или закрыто всасывающее отверстие пипетки, когда пипетка находится, например, в жидкости, изменяется характеристика колебания воздушного столба во всасывающей трубке пипетки. Для возбуждения колебания в воздушном столбе используют источник звука. Если, с другой стороны, определяют момент времени погружения посредством обнаруживаемого повышения давления внутри пипетки, необходимо очень точно отрегулировать определенный поток воздуха через всасывающее отверстие пипетки.
Задача настоящего изобретения состоит в том, чтобы предложить способ контроля состояния пипетки, способ пипетирования, узел всасывающей трубки для пипетирующего устройства и пипетирующее устройство, которые простым и экономически оптимальным образом обеспечивают прецизионный процесс пипетирования.
Эта задача решается за счет способа контроля состояния пипетки с признаками пункта 1 формулы изобретения, способа пипетирования с признаками одного из пунктов 19, 25, 28 или 30, узла всасывающей трубки для пипетирующего устройства с признаками пункта 31 или пипетирующего устройства с признаками пункта 42 формулы изобретения.
Предпочтительные варианты осуществления являются предметом зависимых пунктов формулы изобретения.
Способ согласно изобретению служит для контроля состояния пипетки, которая включает всасывающую трубку и наконечник пипетки. Ультразвук подключен в стенку всасывающей трубки, и затухание ультразвукового сигнала измеряется в зависимости от частоты. Измеренное зависящее от частоты затухание сравнивают по меньшей мере с одним опорным измерением, зависящим от частоты затухания, или с основанной на опорных изменениях калибровочной кривой. Посредством сравнения определяют, находится ли пипетка в исправном рабочем состоянии и/или пипетка содержит жидкость или контактирует с ней.
Отклонение от ожидаемой кривой может привести, например, к генерированию предупредительного сигнала.
Таким образом, заявленный способ позволяет использовать для обнаружения затухание ультразвукового сигнала, которое происходит при подключении ультразвука в стенку пипетки. Колебания, возбужденные ультразвуком в системе, включающей стенку, наконечник пипетки и датчик ультразвука, очень чувствительно реагируют на изменения состояния пипетки. Если, например, пипетка повреждена или в ней отсутствует какая-нибудь часть, например наконечник пипетки, это отражается на затухании ультразвукового сигнала. Возбужденные в системе колебания реагируют, кроме того, очень чувствительно на дополнительное изменение распределения массы, которое, например, возникает при погружении пипетки в жидкость или при всасывании жидкости.
Для измерения зависящего от частоты затухания может быть отправлен, например, ультразвуковой сигнал в частотном диапазоне с определенной полосой частот, и измеренный сигнал оценивают при помощи анализирующего частоту измерительного прибора, например анализатора частотных сетей. В другом варианте реализации способа подключенную частоту со временем изменяют.
Могут сравниваться, например, определенные выбранные характеристики, отдельные значения или кривая измеренного зависящего от частоты ультразвукового сигнала и опорного измерения. Опорное измерение может включать также введение одной или нескольких пороговых величин, превышение или занижение которых полученными измеренными значениями может быть оценено для обнаружения.
При необходимости может быть также привлечена для сравнения полученная из опорных измерений в различных условиях комбинированная калибровочная кривая.
По меньшей мере, одно опорное измерение для сравнения измеренного зависящего от частоты затухания может быть осуществлено при помощи конструктивно аналогичной пипетки. Но особенно выгодно, если используется пипетка с всасывающей трубкой и наконечником, которую применяют также в процессе фактических измерений, чтобы исключить возможные погрешности вследствие различных конструктивных исполнений пипеток.
Зависящее от частоты затухание может измеряться, например, в определенные моменты времени. Выгодно осуществлять непрерывное измерение сигнала затухания, чтобы обеспечить непрерывное наблюдение.
Преимущественным образом выбирают частотный диапазон измерения, в котором находится по меньшей мере одна собственная мода (собственный тип колебаний) применяемой системы. В этом случае, например, возможно простое сравнение значения резонансной частоты измеренного сигнала затухания со значением резонансной частоты опорного измерения или с калибровочной кривой, которая базируется на резонансных частотах в различных условиях. В другом варианте сравнивают резонансную амплитуду собственной моды. Могут быть введены для сравнения также другие характеристики собственной моды, как, например, полуширина пропускания или площадь собственной моды.
Особенно выгодно при этом, если устройство для реализации способа выбирают таким образом, что ультразвук подключен в стенку всасывающей трубки таким образом, что возбуждается множество поперечных мод. Преимуществом в этой связи является, если, например, пьезоактюатор закреплен на всасывающей трубке таким образом, что на всасывающую трубку оказываются преимущественно сдвигающие усилия. Поперечные моды проявляют, например, очень высокую чувствительность в отношении изменения распределения массы, возникающего при погружении наконечника пипетки в жидкость.
Простой вариант реализации заявленного способа предусматривает, что для подключения ультразвука в стенку всасывающей трубки используется пьезоактюатор. Пьезоактюатор выгоден по себестоимости и может быть просто закреплен, например, на наружной стенке всасывающей трубки. Он может включать, например, свинец-цирконат-титанатную керамику.
Для повышения чувствительности актюатора, например, на момент времени погружения, глубину погружения или высоту наполнения пипетки с пьезоактюатором может взаимодействовать дополнительная масса. За счет такой дополнительной массы могут, например, увеличиваться количественные изменения частоты или затухания при погружении пипетки, или при всасывании жидкости в пипетку, или при выталкивании жидкости из пипетки.
Простой вариант реализации способа предусматривает при этом, что применяют дополнительную массу, которая прикреплена или, проще, приклеена на обращенной от всасывающей трубки стороне пьезоактюатора. Особенно предпочтительна дополнительная масса, которая равна от 0,1 до 10 масс всасывающей трубки, предпочтительно от 0,5 до 2 масс всасывающей трубки.
Преимущественным образом пьезоактюатор может быть использован не только как излучатель ультразвуковых колебаний, но также как приемник ослабленного ультразвукового сигнала.
Используемый для ультразвукового сигнала частотный диапазон определяют по специальным свойствам геометрии используемой пипетки, то есть, в частности, массы и материалов всасывающей трубки, используемого наконечника пипетки и, при определенных обстоятельствах, имеющейся дополнительной массы, причем преимущественным образом частотный диапазон выбирают при том условии, что может быть возбуждена собственная мода. Высокая чувствительность достигается, например, если ультразвуковые частоты выбирают из диапазона, который составляет от 1 до 10 значений соотношения скорости звука в пипеточном материале и характеристического изменения геометрических размеров пипетки, в частности ее длины.
Чтобы избежать риска загрязнения, предпочтителен наконечник пипетки одноразового использования. С этой целью могут использоваться пипетки, состоящие из двух частей, при этом первая часть включает всасывающую трубку, а вторая часть - наконечник пипетки, который предпочтительно выполнен с возможностью отсоединения.
Благодаря заявленному способу контроля состояния, в частности применительно к состоящим из двух частей пипеткам, можно констатировать, полностью ли пипетка укомплектована. Способ применим с успехом как автоматизированный способ с одноразовыми наконечниками пипеток, так как может быть проверено наличие наконечника пипетки без визуального контроля со стороны обслуживающего персонала. Отсутствие наконечника пипетки отражается в зависящем от частоты затухании ультразвука и таким образом хорошо засвидетельствовано. Особенно предпочтительным является вариант использования автоматизированного способа пипетирования, при котором робот параллельно обслуживает множество пипеток.
Заявленный способ контроля состояния пипетки предпочтительно может быть использован в процессе пипетирования. При этом заявленный способ позволяет, например, контролировать состояние пипетки, чтобы удостовериться, контактирует ли наконечник пипетки с пипетируемой жидкостью. С этой целью зависящее от частоты затухание может сравниваться с опорным измерением зависящего от частоты затухания, которое было осуществлено на пипетке, не соприкасающейся с жидкостью. Например, может быть точно обнаружено смещение или сглаживание сигнала резонансной частоты, так что может быть точно определен момент времени погружения.
После детектируемого таким образом погружения в жидкость наконечника пипетки жидкость всасывается в пипетку. Затем жидкость вместе с пипеткой может быть перенесена в другое место и вновь удалена из пипетки.
Особенно просто протекает такой вариант реализации способа, если пипетка с всасывающей трубкой и наконечником пипетки с некоторой точки над подлежащей пипетированию поверхностью жидкости опускается в направлении жидкости. Во время процесса опускания может быть измерено зависящее от частоты затухание, чтобы таким образом получить перед погружением опорный сигнал. Дальнейшее опускание приводит к тому, что наконечник пипетки контактирует с поверхностью жидкости, в результате чего изменяется зависящий от частоты сигнал затухания. Следовательно, в этом предпочтительном варианте реализации во время опускания пипетки в направлении жидкости измеряют зависящее от частоты затухание, чтобы на основе изменения зависящего от частоты сигнала затухания определить момент соприкосновения наконечника пипетки с поверхностью жидкости.
Для характеристики процесса пипетирования в одном варианте реализации изобретения на основе зависящего от частоты сигнала затухания делают вывод о состоянии пипетки относительно глубины погружения в жидкость. Чем глубже наконечник пипетки погружается в жидкость, тем сильнее изменяется зависящий от частоты сигнал затухания относительно опорного измерения, в ходе которого пипетка находится вне жидкости.
В другом заявленном способе пипетирования во время всасывания жидкости в пипетку отслеживают зависящий от частоты сигнал затухания, чтобы таким образом получить информацию об отсосанном уже объеме жидкости, которое также оказывает воздействие на зависящее от частоты затухание. Затем всосанная жидкость может быть перенесена в другое место и вновь удалена.
Наконец, в следующем заявленном способе пипетирования на основе зависящего от частоты сигнала затухания, который прослеживают во время выталкивания жидкости из пипетки, может быть точно установлено, в какой момент времени пипетка в конце процесса пипетирования достигла состояния полного опорожнения. Для реализации этого способа зависящий от частоты опорный сигнал отслеживают во время процесса опорожнения.
Еще один заявленный способ пипетирования включает заявленный способ контроля состояния пипетки для определения характера жидкости, которая в процессе пипетирования находится в пипетке. Различные жидкости, например, различной плотности вызывают различное поведение затухания ультразвука во всасывающей трубке, в которой они находятся. В этом отношении сигнал затухания во всасывающей трубке путем сравнения с соответствующими опорными измерениями может быть использован также для определения характера жидкости. Могут быть привлечены для характеристики также другие физические или химические свойства жидкости, которые могут оказывать воздействие на затухание содержащей жидкость всасывающей трубки.
В частности, при использовании заявленных способов для определения момента погружения, отслеживания уровня наполнения или процесса опорожнения могут выгодно комбинироваться несколько опорных измерений для получения калибровочной кривой.
Изобретение также включает, в частности, комбинирование двух или большего числа заявленных согласно изобретению способов пипетирования или способов контроля состояния в процессе пипетирования.
Заявленный узел всасывающей трубки для пипетирующего устройства пипетирования жидкости содержит датчик ультразвука, который закреплен на всасывающей трубке и служит для подключения ультразвука в стенку всасывающей трубки. Управляющее устройство служит для управления датчиком ультразвука при излучении ультразвукового сигнала в заданном частотном диапазоне, приемное устройство предусмотрено для приема ослабленного ультразвукового сигнала.
Наконец, узел всасывающей трубки согласно изобретению имеет всасывающее устройство, при помощи которого может быть создан вакуум во всасывающей трубке для всасывания жидкости во всасывающую трубку или прокачки жидкости через нее. При этом здесь может идти речь, например, о пипеточном всасывающем плунжере, который перемещается во всасывающей трубке.
Такой узел всасывающей трубки согласно изобретению может быть использован, в частности, для заявленных способов пипетирования и заявленного способа контроля состояния. В частности, таким образом могут быть использованы одноразовые наконечники для пипетирования, которые насаживают на всасывающую трубку для формирования пипетки вместе с всасывающей трубкой. Подключение ультразвукового сигнала в стенку всасывающей трубки и измерение ослабленного ультразвукового сигнала может быть осуществлено вышеописанным образом для реализации заявленных способов.
Предпочтительные варианты реализации заявленного узла всасывающей трубки проистекают аналогичным образом из описанных вариантов реализации заявленных способов и их преимуществ.
В частности, для осуществления зависящего от частоты измерения в заявленном узле могут быть выполнены управляющее устройство и приемное устройство соответственно для управления и приема широкополосного или изменяющегося по времени ультразвукового сигнала.
В предпочтительном варианте реализации заявленного узла всасывающей трубки предусмотрено устройство для зависящей от частоты оценки ослабленного ультразвукового сигнала, преимущественным образом в отношении его резонансной частоты и/или его резонансной амплитуды. Благодаря такому обрабатывающему устройству может быть легко автоматизирован процесс пипетирования и отслеживание процесса пипетирования.
Обрабатывающее устройство может включать также запоминающее устройство, в котором хранятся данные опорных измерений или составленных на их основе калибровочных кривых для сравнения.
Если в заявленном узле всасывающей трубки датчик ультразвука предусмотрен на наружной стороне стенки всасывающей трубки, это исключает загрязнение датчика ультразвука жидкостью.
Применение дополнительной массы, которая взаимодействует с датчиком ультразвука, в частности склеена с ним, может способствовать повышению чувствительности датчика ультразвука. Предпочтительная величина дополнительной массы составляет от 0,1 до 10, предпочтительно от 0,5 до 2 масс всасывающей трубки.
Особенно экономически выгодным и простым является использование пьезоактюатора как датчика ультразвука.
Заявленный узел всасывающей трубки может быть неотъемлемой составной частью пипетки в целом. Однако особенно преимущественным является использование узла всасывающей трубки согласно изобретению в пипетирующем устройстве, по меньшей мере, с пипеткой, состоящей из двух частей, при этом первая часть заявленного узла включает всасывающую трубку, а вторая часть - наконечник пипетки. Чтобы обеспечить легкую замену наконечника пипетки, который может быть выполнен, например, как одноразовая деталь, особым преимуществом здесь является, если обе части пипетирующего устройства выполнены с возможностью отсоединения одна от другой, чтобы таким образом упростить процесс замены наконечника пипетки.
Ниже изобретение поясняется на основе примеров различных форм реализации и конструктивных исполнений, при этом делаются ссылки на схематичный чертеж, на котором представлены:
фиг.1 - нижняя зона выполненного согласно изобретению пипетирующего устройства,
фиг.2 - зависящий от частоты сигнал затухания при различных глубинах погружения,
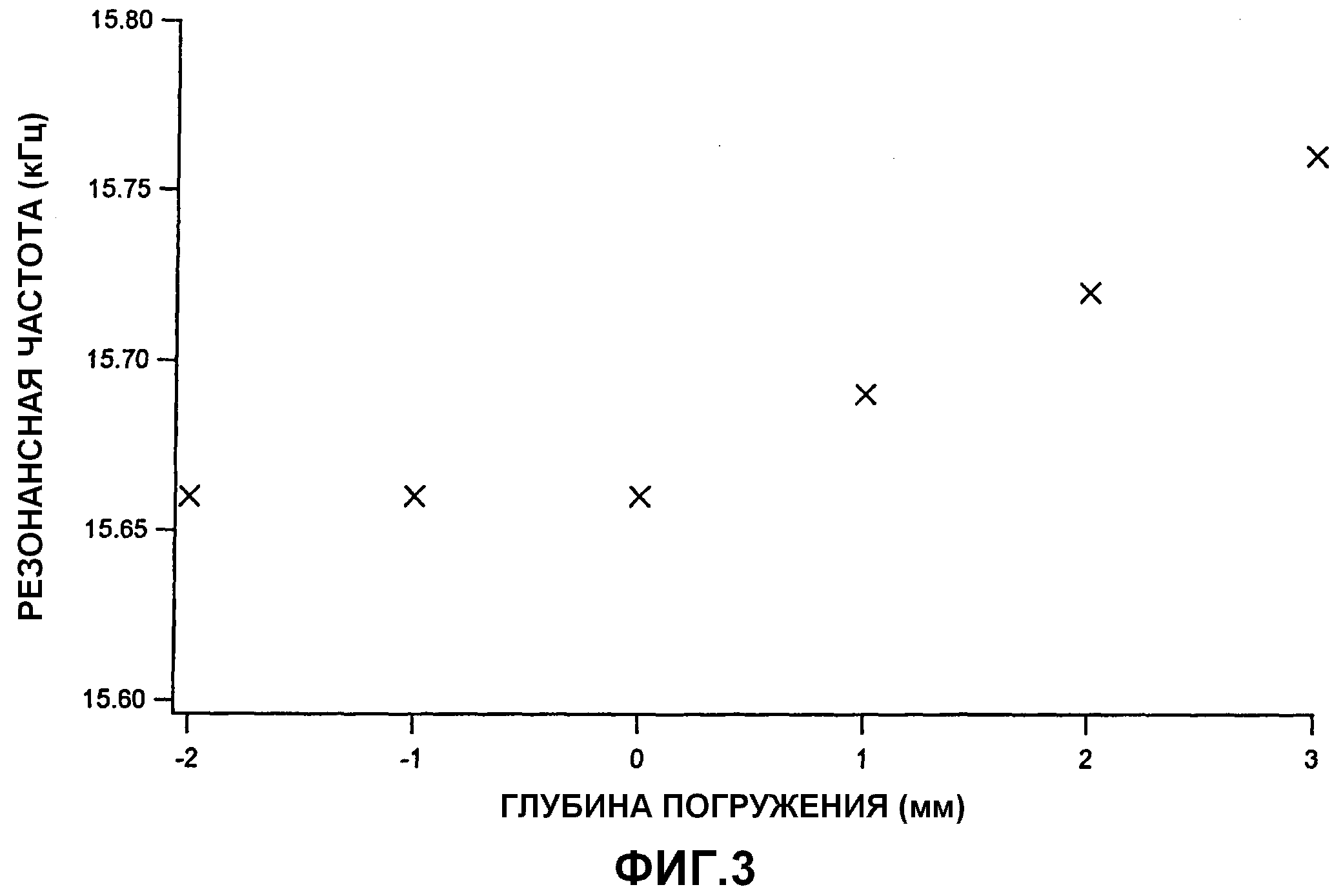
фиг.3 - диаграмма сигнала затухания в зависимости от глубины погружения пипетки,
фиг.4 - зависящее от частоты затухание при различных объемах наполнения пипетки и
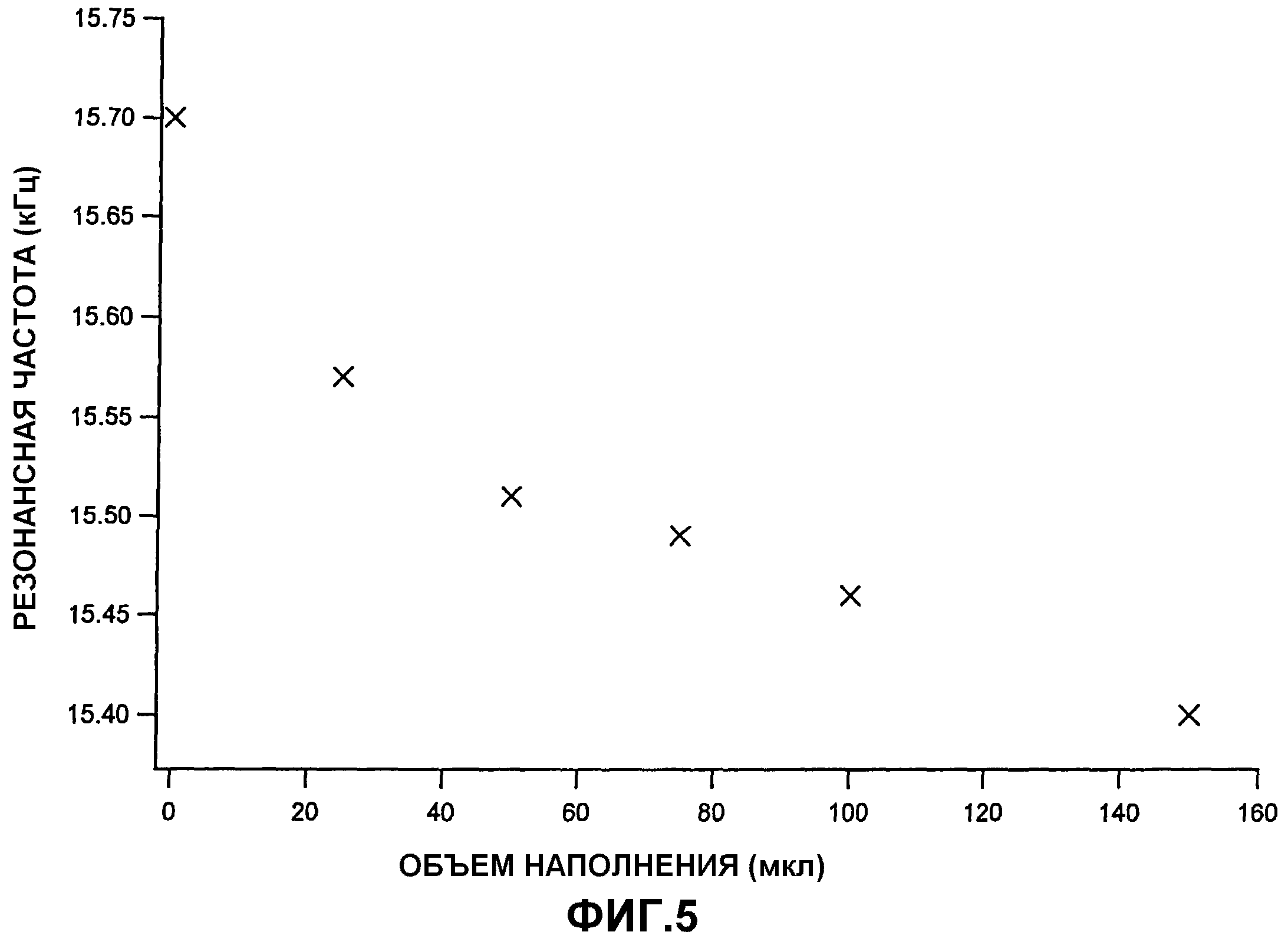
фиг.5 - диаграмма резонансной частоты в зависимости от объема наполнения.
На фиг.1 показан нижний конец пипетки 10 с наконечником 14. Наконечник пипетки имеет отбортовку 16, при помощи которой его насаживают на всасывающую трубку 12. Наконечник 14 пипетки выполнен, например, из полипропилена.
Всасывающая трубка 12, представленная лишь частично, может быть использована в полностью автоматизированной роботосистеме пипетирования. Во всасывающей трубке находится известным образом всасывающий плунжер, который может приводиться в движение посредством моторного шпинделя, чтобы всасывать или выталкивать жидкость в пипетке.
В другой форме осуществления плунжер находится во внешнем устройстве, которое соединено с всасывающей трубкой при помощи шланга. Как альтернатива, к всасывающей трубке может быть также присоединено всасывающее устройство, например соответствующий насос.
Позицией 18 обозначен пьезоэлектрический актюатор, который используется как передатчик ультразвука и приемник ультразвука. Преимущественным образом используют элемент из пьезоэлектрического материала, например свинец-цирконат-титанатную керамику. Пьезоэлектрический актюатор 18 посредством подводящей линии 20, которая представляет собой, например, два тонких кабеля, соединена с непоказанным управляющим им обрабатывающим блоком, который содержит, например, соответственно запрограммированный микропроцессор.
Пьезоактюатор 18 закреплен на всасывающей трубке 12, например, эпоксидным клеем. Он ориентирован таким образом, что преимущественно может совершать тангенциальное движение относительно всасывающей трубки 12, так что возбуждается множество поперечных мод.
На обращенной от всасывающей трубки 12 стороне пьезоактюатора 18 может быть помещена дополнительная масса 19, чтобы повысить чувствительность пьезоактюатора. Дополнительная масса может составлять, например, от 0,1 до 10 масс всасывающей трубки.
Пьезоэлектрический актюатор выбран таким образом, что он может возбуждать колебания, в частности, в частотном диапазоне собственных мод колебательной системы из используемой всасывающей трубки 12 со вставленным наконечником 14 пипетки, актюатора 18 и, при необходимости, дополнительной массы 19. Как правило, такие собственные моды находятся в диапазоне от 10 до 80 кГц, которые могут хорошо возбуждать пьезоэлектрические свинец-цирконат-титанатные элементы.
Измерительная система, которая содержит управляющее и обрабатывающее устройство, выполнена таким образом, что может посылать на пьезоактюатор в высокочастотном интервале определенную энергию и измерять возвращающийся на пьезоактюатор 18 ослабленный ультразвуковой сигнал, при этом чувствительность находится, например, в диапазоне 10 мкВ. Чтобы измерить зависящее от частоты затухание, обрабатывающее устройство включает, например, анализатор частотных сетей. Обрабатывающее устройство выполнено таким образом, что измерение или измеренные характеристические значения сравнивают с хранящимися в запоминающем устройстве опорными измерениями или полученными на их основе калибровочными кривыми.
На фиг.1 показана пипетка 10 в состоянии, в котором она находится вблизи поверхности 22 жидкости, предназначенной для пипетирования. С этой целью пипетка может быть опущена, например, при помощи робота для пипетирования в направлении А на поверхность 22 жидкости.
Всасывающая трубка 12 подвешена, например, в роботе для пипетирования с максимальной возможностью гашения колебаний, так что возникающие в механической конструкции колебания не передаются на пипетку и измерение ослабленных ультразвуковых колебаний пьезоактюатором не подвергается искажению. Всасывающая трубка 12 в этом примере закреплена в роботе для пипетирования не жестко, чтобы жесткое крепление не создавало помех собственным модам, которые возбуждает пьезоактюатор 18 и гашение которых используют для измерения. Однако не исключается и жесткое крепление, если возникающие в данном случае колебания робота достаточно малы или принимаются в расчет при обработке измерения.
Пипетку, показанную на фиг.1, используют следующим образом.
От управляющего и обрабатывающего устройства посредством подводящих линий 20 высокочастотный сигнал подается в пьезоактюатор 18, который находится, например, в диапазоне частот от 10 до 80 кГц. Это возбуждает во всасывающей трубке 12 собственные колебания. На фиг.2 кривая 100 показывает, например, затухание в децибелах, которое измеряется пипеткой, находящейся поверх зеркала 22 жидкости, и в этом отношении погружена в жидкость на 0 мм. Показано затухание подключенного ультразвукового колебания посредством возбуждения собственной моды в системе из всасывающей трубки 12 с наконечником 14 пипетки, актюатора 18 и, при необходимости, имеющейся дополнительной массы 19. Показаны измерения пипеткой с емкостью 1 мл.
Возбужденные колебания во всасывающей трубке 12 приводят к деформации пьезоэлектрического актюатора, в результате чего в нем индуцируются электрические напряжения. При помощи соответствующего измерительного устройства электрическую реакцию системы сравнивают с высокочастотным сигналом возбуждения, при этом разность при возбуждении собственной моды является наибольшей. Собственную моду определяют главным образом свойства всасывающей трубки 12, наконечника 14 пипетки и имеющейся, при необходимости, дополнительной массы 19 или уплотнение массы элементов, предназначенной для пипетирования жидкостью.
Теперь пипетку 10 перемещают, например, при помощи робота для пипетирования в направлении А к поверхности 22 жидкости. В тот момент, когда наконечник соприкасается с жидкостью, изменяется затухание. Резонансная частота смещается, и резонансная амплитуда уменьшается. На фиг.2 это показано на примере различных глубин погружения. Позиция 102 показывает сигнал с пипеткой, погруженной в жидкость на 1 мм, позиция 104 показывает сигнал с пипеткой, погруженной в жидкость на 2 мм, и позиция 106 показывает сигнал с пипеткой, погруженной в жидкость на 3 мм.
Возникает взаимосвязь между затуханием и резонансной частотой, как показано в форме диаграммы на фиг.3. Отрицательные значения для глубины погружения относятся к измерениям, в которых пипетка находится на соответствующем расстоянии над поверхностью жидкости, и в этом отношении они равны между собой. Диаграмма, подобная показанной на фиг.3, может быть использована, например, как калибровочная кривая, в данном случае после того, как проставленные опорные точки будут соединены кривой.
Если резонансная частота сигнала затухания смещается в сторону больших частот, это показывает, что пипетка погружена в жидкость. Сама глубина погружения может быть зафиксирована, например, на основе диаграммы, как показано на фиг.3.
Как только пипетка 10 своим наконечником 14 коснется жидкости или погрузится в нее, жидкость посредством робота для пипетирования известным образом при помощи всасывающей трубки пипетки может быть забрана в пипетку. При этом вновь может быть измерено зависящее от частоты затухание ультразвукового сигнала, который посредством пьезоактюатора 18 подключен в стенку всасывающей трубки 12. Соответствующие кривые измерений показаны на фиг.4, например, для пипетки емкостью 1 мл. Позицией 200 обозначена кривая измерения зависящего от частоты сигнала затухания при пустой пипетке. Позицией 202 обозначено измерение на пипетке, наполненной 25 мкл жидкости. Позицией 204 обозначена кривая измерения для пипетки, наполненной 50 мкл жидкости, а позицией 206 обозначена кривая измерения для пипетки, наполненной 75 мкл жидкости. Наконец, позицией 208 обозначено измерение затухания для пипетки, наполненной 100 мкл жидкости, а позицией 210 обозначена кривая измерения, осуществленного на пипетке, наполненной 150 мкл жидкости. Создается взаимосвязь для зависящего от частоты сигнала затухания с зависимостью от объема наполнения, как показано на фиг.5.
Из этой диаграммы для измеренной резонансной частоты можно установить, какой объем точно находится в пипетке. Такая диаграмма, как на фиг.5, может быть использована, например, как калибровочная кривая, в данном случае после того, как проставленные опорные точки будут соединены кривой.
В процессе опорожнения пипетки также может быть точно определено, вышла ли и соответственно когда вышла полностью жидкость из пипетки. С этой целью также может прослеживаться зависящее от частоты затухание и посредством сравнения с опорным измерением или калибровочной кривой может быть зафиксировано, согласно, например, фиг.5, когда сигнал соответствует сигналу пустой пипетки.
Как вариант показанной здесь диаграммы, может быть вычислена также резонансная амплитуда, которая также зависит от глубины погружения или объема наполнения, как это может быть отчетливо видно на фиг.2 и 4. Другие способы предусматривают обработку результатов по площади резонансной кривой или по полуширине пропускания.
Чувствительность пьезоактюатора 18 в момент погружения, на глубину погружения и объем наполнения в пипетке может быть повышен за счет дополнительной массы, составляющей, например, от 0,1 до 10 масс всасывающей трубки, которая приклеена на обращенной от пипетки стороне пьезоактюатора 18. Благодаря такой дополнительной массе увеличивается изменение частоты или затухания при погружении пипетки в жидкость или при всасывании жидкости в пипетку, или выталкивании жидкости из пипетки.
До процесса и во время процесса пипетирования может осуществляться при помощи заявленного способа контроль того, находится ли пипетка в соответствующем условиям работы состоянии. Например, погрешность или неплотность в наконечнике пипетки или во всасывающей трубке отражается в измеренном зависящем от частоты сигнале затухания. Также если наконечник 14 пипетки не насажен на всасывающую трубку 12, это сказывается на зависящем от частоты сигнале затухания, который отклоняется от соответствующего опорного измерения.
После процесса пипетирования простой, экономный по себестоимости, изготовленный, например, из пропилена наконечник пипетки может быть заменен, чтобы избежать загрязнений жидкости при будущих измерениях.
В заявленном способе и заявленных устройствах ультразвук подключен в стенку всасывающей трубки 12. Подключение во всасывающую трубку может быть реализовано просто, и оно проще, чем, например, подключение в объем пипетки. Оно может быть осуществлено при помощи пьезоактюатора в легкодоступном частотном диапазоне. Наконечник пипетки не требует особого выполнения или особых материалов, так что может быть изготовлен как элемент одноразового применения.
Особенно предпочтительным является использование в автоматизированных способах пипетирования. Здесь роботом для пипетирования параллельно наполняются, при необходимости, пипетки в очень большом количестве и по нескольку пипеток одновременно, и удаляется из них забранная жидкость. При этом особенно важным здесь является то, что отдельные пипетки могут быть точно проверены и отслежены, так как оптический контроль со стороны обслуживающего персонала, как правило, не осуществляется. Заявленные способы и заявленные устройства являются в этом отношении особенно подходящими, так как обеспечивают точную проверку функционирования и контроль состояния. Кроме того, просто фиксируется уровень наполнения в пипетке и/или характер содержащейся в пипетке жидкости. Важным применением является, например, депонирование проб крови, сданной на анализ.
Перечень ссылочных позиций
10 Пипетка
12 Всасывающая трубка
14 Наконечник пипетки
16 Отбортовка
18 Пьезоактюатор
19 Дополнительная масса
20 Подводящие линии
22 Поверхность жидкости
100, 102, 104 Зависящие от частоты сигналы затухания
106, 200, 202,
204, 206, 208
210
А Направление опускания
Реферат
Группа изобретений относится к устройствам и способу контроля состояния пипетки. Способ контроля состояния пипетки, которая включает всасывающую трубку и наконечник пипетки, состоит в том, что вводят ультразвуковой сигнал в стенку всасывающей трубки, при этом ультразвуковой сигнал генерируют пьезоактюатором, установленным на указанной стенке всасывающей трубки, причем пьезоактюатор находится в контакте с дополнительной массой на стороне, обращенной от всасывающей трубки, при этом дополнительная масса выполнена для повышения чувствительности пьезоактюатора, в зависимости от частоты измеряют зависящее от частоты затухания затухание ультразвукового сигнала в стенке всасывающей трубки в заданном частотном диапазоне, содержащем множество частот, посредством сравнения измеренного зависящего от частоты затухания в заданном частотном диапазоне, по меньшей мере, с одним опорным измерением зависящего от частоты затухания или с основанной на опорных измерениях калибровочной кривой определяют, содержит ли пипетка жидкость или контактирует ли с ней. Технический результат - обеспечение прецизионного процесса пипетирования. 7 н. и 37 з.п. ф-лы, 5 ил.
Формула
вводят ультразвуковой сигнал в стенку всасывающей трубки, при этом ультразвуковой сигнал генерируют пьезоактюатором, установленным на указанной стенке всасывающей трубки, причем пьезоактюатор находится в контакте с дополнительной массой на стороне, обращенной от всасывающей трубки, при этом дополнительная масса выполнена для повышения чувствительности пьезоактюатора,
в зависимости от частоты измеряют зависящее от частоты затухание ультразвукового сигнала в стенке всасывающей трубки в заданном частотном диапазоне, содержащем множество частот,
посредством сравнения измеренного зависящего от частоты затухания в заданном частотном диапазоне, по меньшей мере, с одним опорным измерением зависящего от частоты затухания или с основанной на опорных измерениях калибровочной кривой определяют, содержит ли пипетка жидкость или контактирует ли с ней.
погружают наконечник пипетки в жидкость, и
всасывают жидкость в наконечник пипетки,
при этом с помощью способа по п.1 проверяют, контактирует ли наконечник пипетки с жидкостью, а после погружения наконечника пипетки в жидкость - всасывается ли жидкость в наконечник пипетки.
погружают наконечник пипетки в жидкость, и
всасывают жидкость в пипетку,
причем с помощью способа по п.1 определяют, содержит ли наконечник пипетки жидкость, и на основе зависящего от частоты сигнала затухания делают вывод относительно количества жидкости в пипетке.
погружают наконечник пипетки в жидкость, и
всасывают жидкость в пипетку,
при этом с помощью способа по п.1 определяют, содержит ли пипетка жидкость, и на основе зависящего от частоты сигнала затухания делают вывод относительно характера жидкости в пипетке.
погружают наконечник пипетки в жидкость,
всасывают жидкость в пипетку, и
освобождают пипетку от жидкости;
при этом с помощью способа по п.1 проверяют, полностью ли пипетка освободилась от жидкости после процесса пипетирования.
закрепленный на всасывающей трубке ультразвуковой датчик для введения ультразвукового сигнала в стенку всасывающей трубки, при этом ультразвуковой датчик находится в контакте с дополнительной массой, выполненной на стороне ультразвукового датчика, которая обращена от всасывающей трубки, при этом дополнительная масса выполнена для повышения чувствительности ультразвукового датчика,
управляющее устройство для управления ультразвуковым датчиком для излучения ультразвукового сигнала в заданном частотном диапазоне, содержащем множество частот,
приемное устройство для приема ослабленного ультразвукового сигнала в стенке всасывающей трубки в зависимости от частоты в заданном частотном диапазоне, и
всасывающее устройство для создания вакуума во всасывающей трубке для всасывания жидкости во всасывающую трубку или прокачки жидкости через нее.
Комментарии