Способ управления задним барабаном очистного комбайна двустороннего действия (варианты) - RU2556541C2
Код документа: RU2556541C2
Чертежи


Описание
Данное изобретение относится к способу управления режущим органом очистного комбайна, содержащего корпус, выполненный с возможностью продвижения вдоль забоя с полезным ископаемым, причем корпус с каждой стороны имеет поворотную рукоять, установленную на корпусе с возможностью поворота, каждая из которых снабжена вращающимся режущим барабаном. Этот тип комбайна известен как комбайн двустороннего действия с поворотными барабанами.
Уровень техники
Известны множество средств отбойки и выемки полезных ископаемых, однако одним из широко используемых способов, в частности для добычи угля, является использование очистного комбайна с поворотными барабанами, содержащего с каждого конца поворотные рукояти, причем режущий барабан, содержащий несколько резцов, вращается на конце каждой поворотной рукояти, прикрепленной с возможностью поворота к корпусу комбайна. Корпус комбайна перемещают вдоль забоя, при этом каждый вращающийся барабан отбивает породу из забоя.
Управление таким комбайном осуществляют так, чтобы обеспечивать постоянное резание барабаном в пределах забойного пласта путем регулирования углового положения поворотных рукоятей. Опытные машинисты, наблюдающие за продвижением барабана и пластом, могут осуществлять управление вручную, но также могут использоваться автоматические средства, так как образование пыли и распыление воды может ухудшить видимость барабана машинистами.
Такой комбайн снабжен несколькими установленными на нем датчиками, причем указанные датчики выполнены с возможностью измерения различных рабочих параметров и формирования электрических сигналов, представляющих указанные параметры. Например, некоторые из указанных датчиков могут быть выполнены с возможностью измерения вдоль забоя угла продольного или поперечного крена комбайна, другие датчики могут быть выполнены с возможностью измерения перемещения и направления комбайна, а остальные датчики могут быть выполнены с возможностью измерения положений передней и задней поворотных рукоятей относительно комбайна.
При управлении очистным комбайном важно предотвращать попадание рабочих органов комбайна в пласты, находящиеся по обе стороны забойного пласта. Для этого обычно оставляют несколько дюймов отбиваемой породы для образования кровли и подошвы, так чтобы какие-либо незначительные отклонения в траектории перемещения очистного комбайна приводили к изменению лишь толщины оставленных кровли и подошвы и не приводили к подрезке смежных пластов.
Забои штрека лавы обычно расположены над подошвой выработки выше, чем остальная часть забоя, так как в забоях штрека настил конвейера должен проходить выше приводной станции конвейера. Это приводит к тому, что в забоях штрека очистной комбайн приподнимается, в результате чего машинист комбайна в забоях штрека должен опускать поворотную рукоять ниже для поддержания эффективной отбойки угля на забое.
Проблема может возникнуть, когда оператор оставляет поворотную рукоять в опущенном положении и пытается выйти из участка забоя штрека. В этом случае положение поворотной рукояти находится ниже предельной величины подрезки, и очистной комбайн может подрезать подошву забоя, что может привести к повреждению комбайна.
Сущность изобретения
Целью данного изобретения является создание улучшенного способа управления задним барабаном очистного комбайна для снижения вероятности подрезания оператором породы ниже забоя.
Другой целью данного изобретения является ограничение величины подрезки на забое на участках, отличных от концевых участков забоя (называемых забоями штрека, например передним и задним забоями штрека), далее называемых забойной дорожкой, при обеспечении полной подрезки на забоях штрека.
Система управления контролирует угловое положение каждой поворотной рукояти относительно основной рамы комбайна. Если при нахождении комбайна в определенной зоне вдоль забоя машинист задает угловое положение рукояти, находящееся ниже заданной параметром точки, называемой предельной величиной подрезки, система управления предотвращает дальнейшее опускание рукояти. При входе на забойную дорожку из какого-либо забоя штрека, если любая из поворотных рукоятей находится ниже заданной точки, останавливают горизонтальное перемещение комбайна, активируют сообщение сигнализации и предупредительную световую сигнализацию, предупреждая машиниста о том, что он должен поднять рукоять, прежде чем можно будет возобновить горизонтальное перемещение комбайна.
Комбайн включает инклинометры поворотных рукоятей, датчик продольного и поперечного крена и датчики приводной шестерни.
Краткое описание чертежей
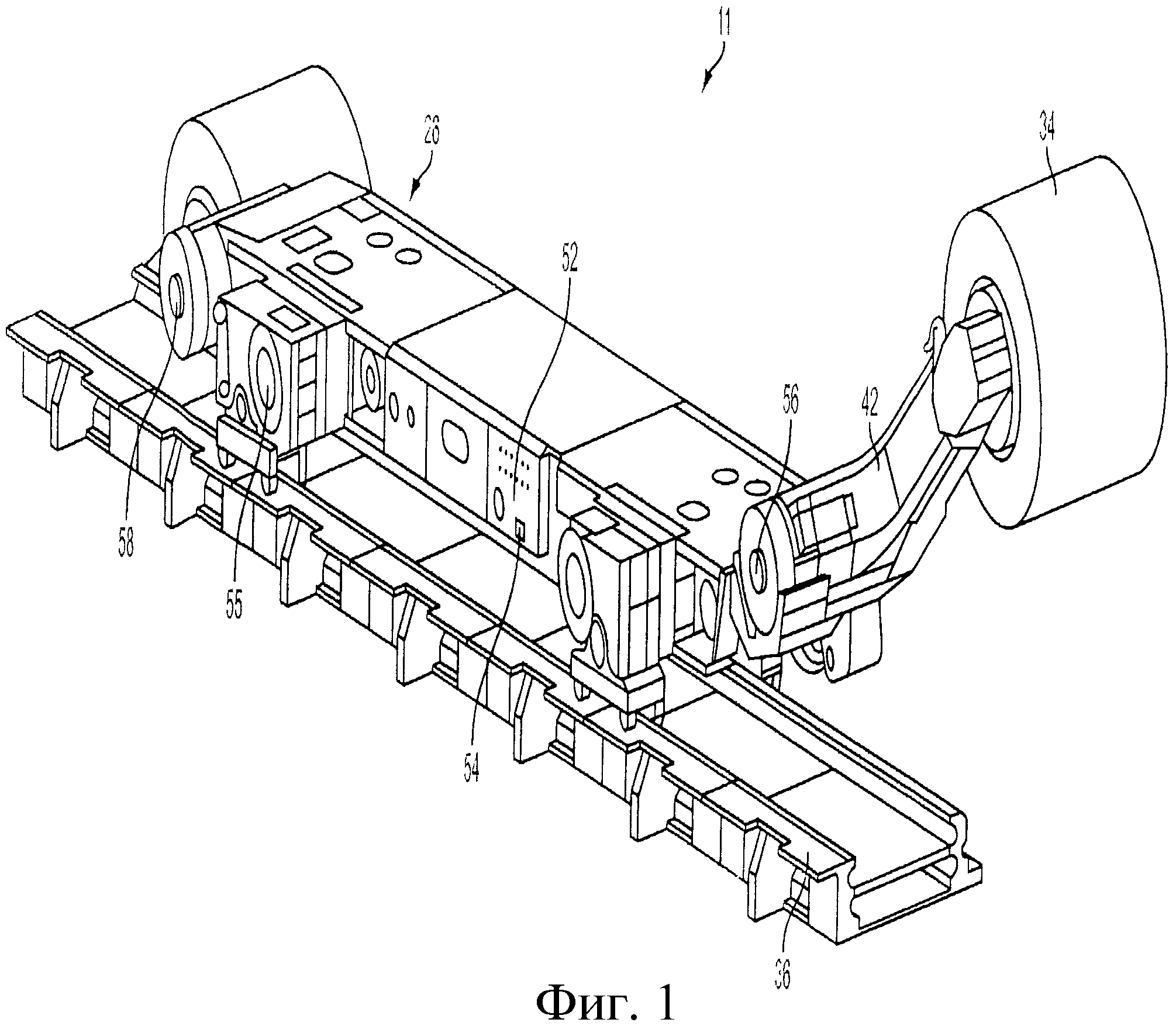
Фиг.1 представляет собой вид в аксонометрии очистного комбайна, известного как очистной комбайн, используемый в лаве, перемещающегося вдоль скребкового забойного конвейера.
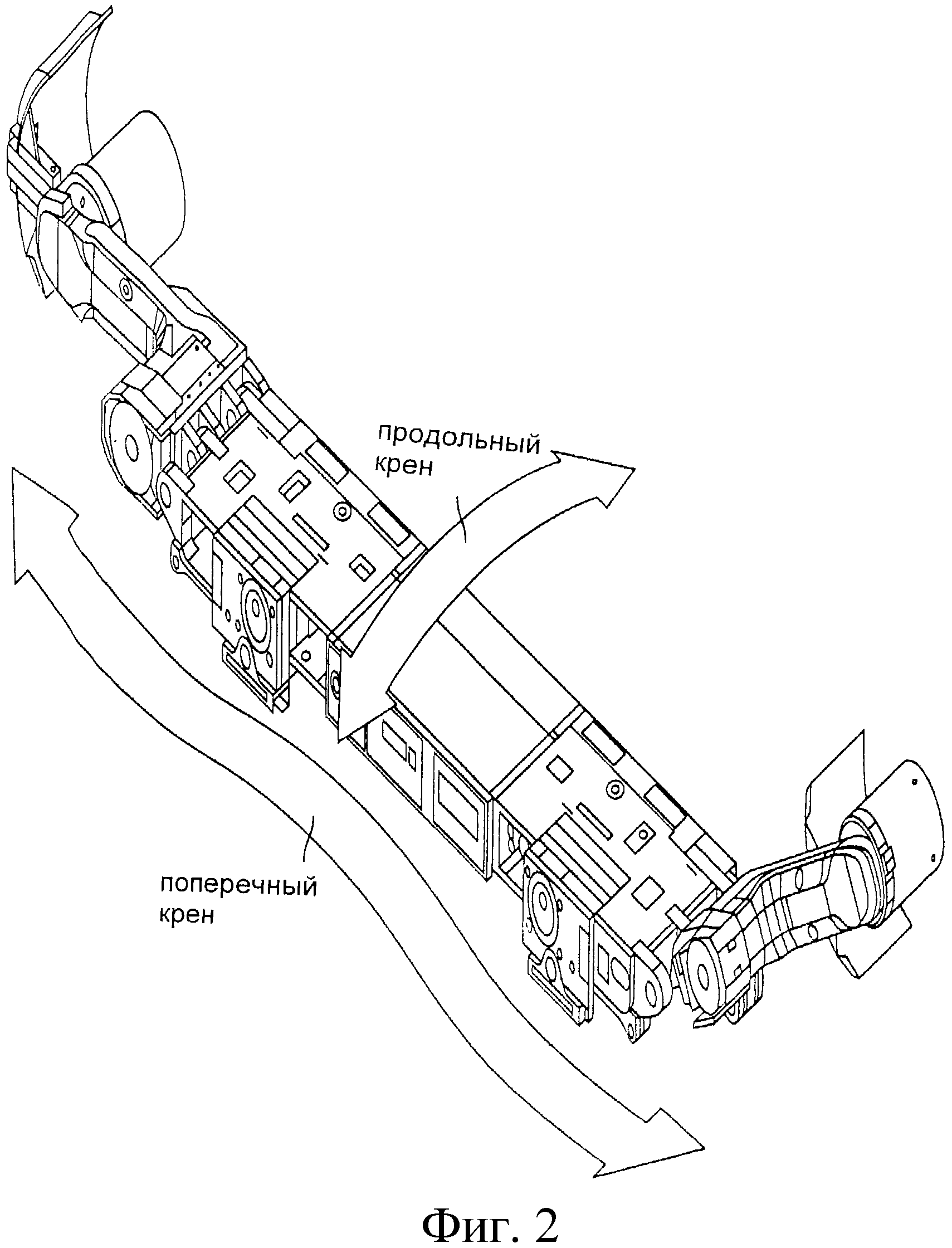
Фиг.2 представляет собой вид в аксонометрии очистного комбайна, показанного на фиг.1, со стрелками, обозначающими продольный и поперечный крены комбайна, а также положение поворотной рукояти относительно комбайна.
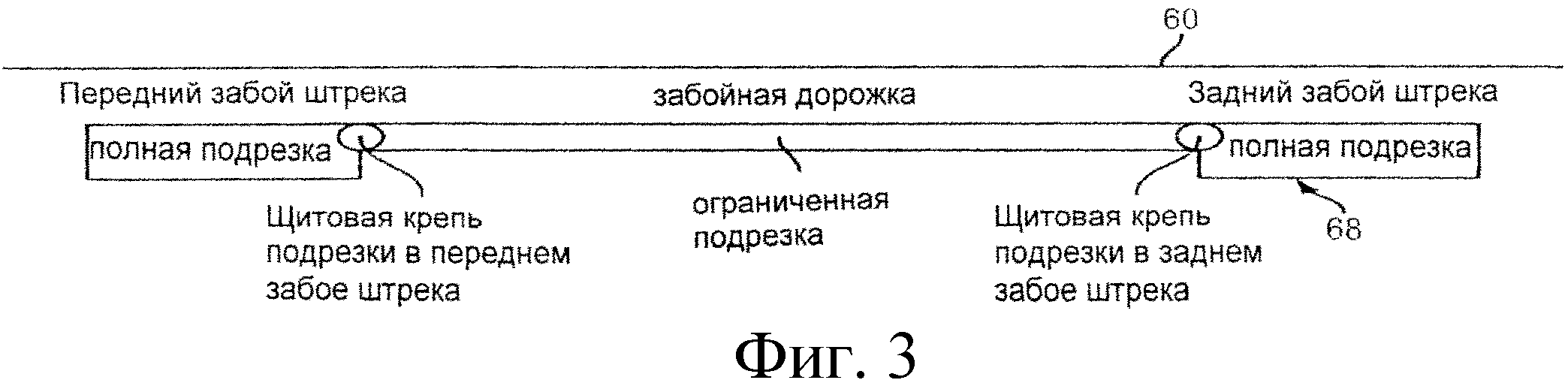
Фиг.3 представляет собой схему лавы.
Фиг.4 представляет собой блок-схему программы 64 для защиты от подрезания.
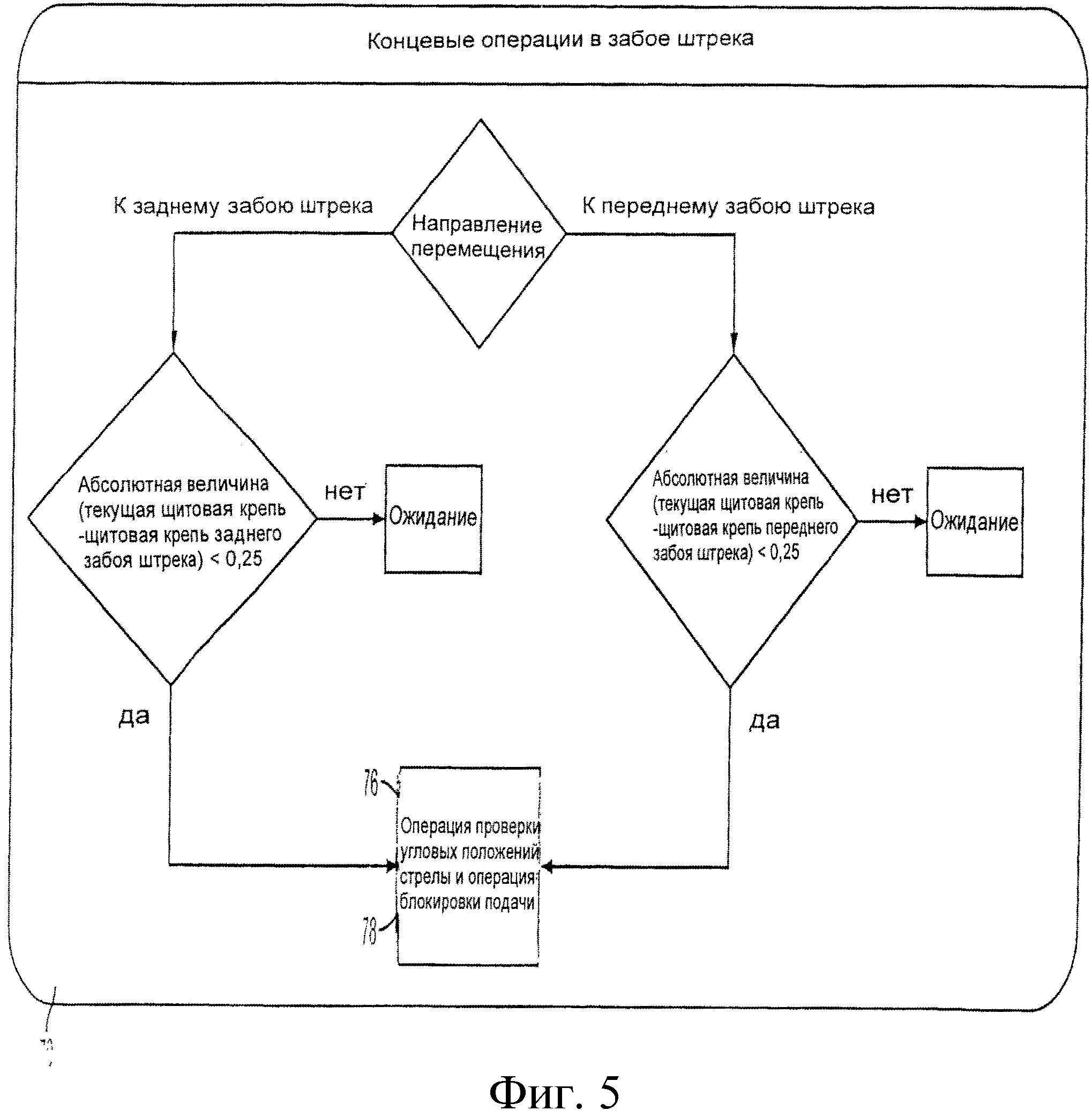
Фиг.5 представляет собой блок-схему концевых операций 70 в забое штрека, показанных на фиг.4.
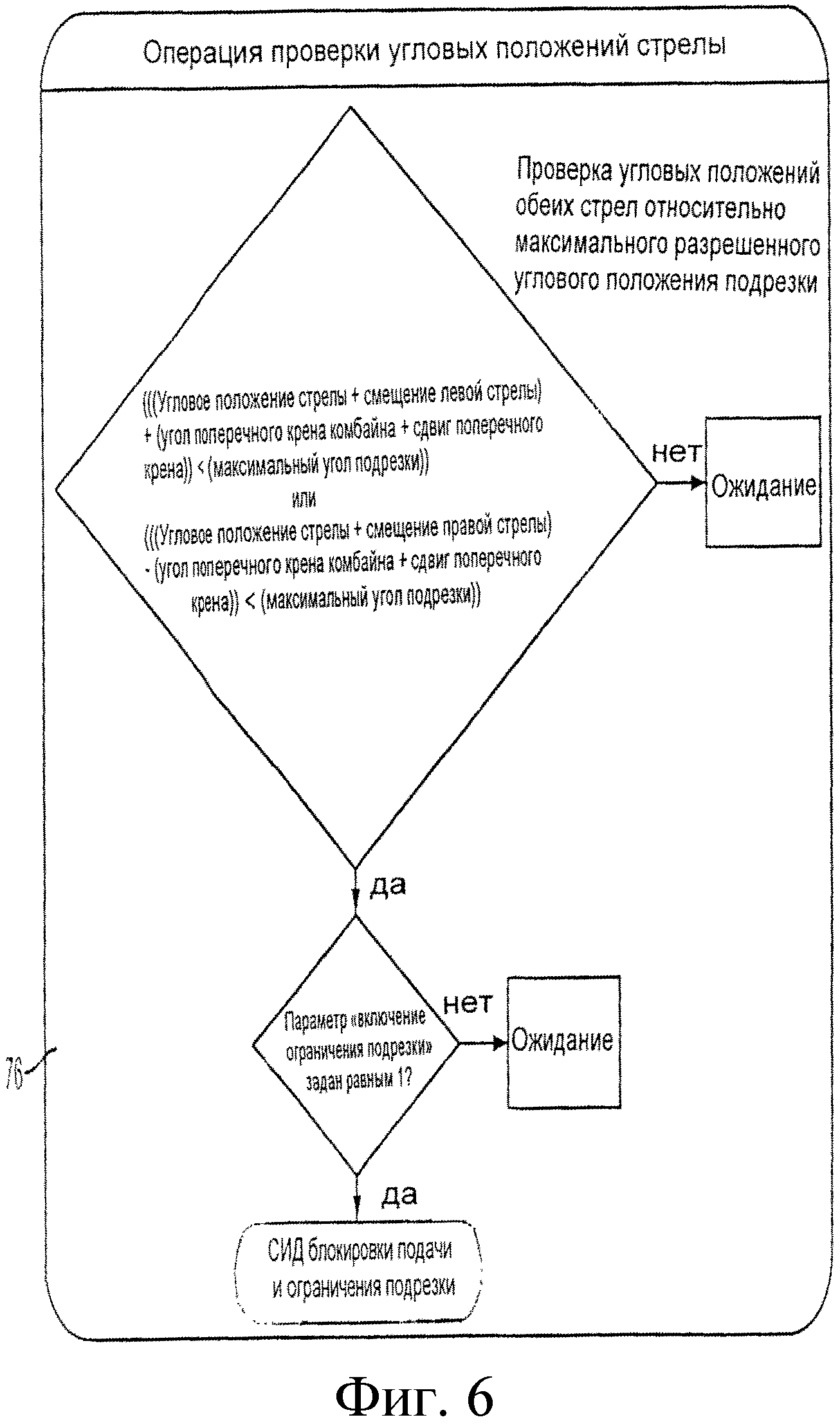
Фиг.6 представляет собой блок-схему операции 76 проверки угловых положений стрелы, показанной на фиг.5.
Фиг.7 представляет собой блок-схему операции 78 контроля блокировки подачи.
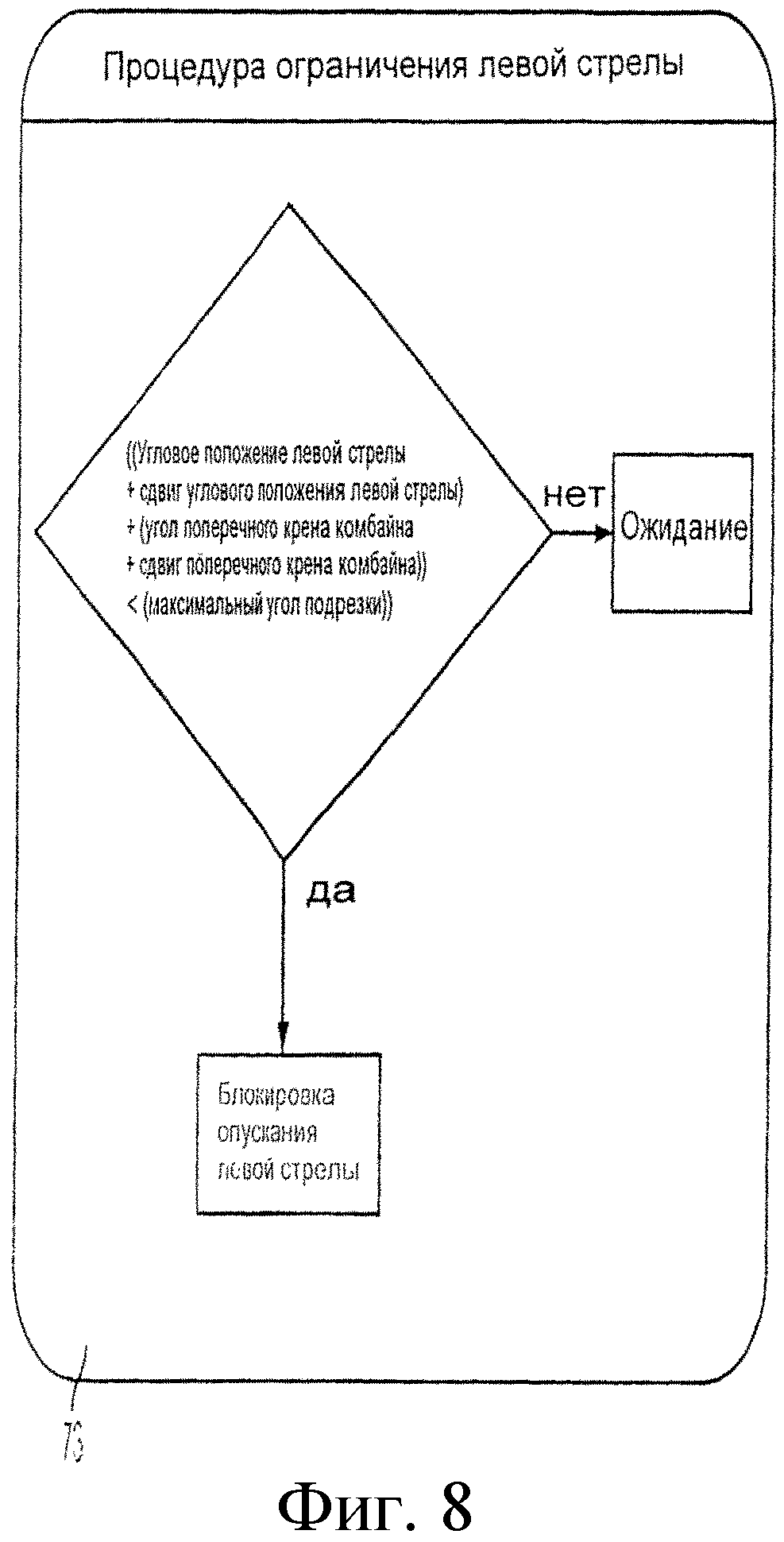
фиг.8 представляет собой блок-схему операции 73 ограничения левой стрелы, показанной на фиг.7.
Фиг.9 представляет собой блок-схему операции 74 ограничения правой стрелы, показанной на фиг.7.
Перед описанием одного варианта выполнения данного изобретения следует отметить, что реализация данного изобретения не ограничивается конструкцией и расположением компонентов, раскрытыми в последующем описании или проиллюстрированными на чертежах. Данное изобретение может иметь другие варианты выполнения и может быть реализовано на практике или выполнено различными способами. Кроме того, следует понимать, что используемые в данном документе фразы и термины предназначены для описания и не должны рассматриваться как ограничивающие изобретение. Использование в данном документе слов «включающий» и «содержащий», а также их производных подразумевает включение перечисленных далее элементов и их эквивалентов, а также дополнительных элементов. Использование в данном документе слова «состоящий из» и его производных подразумевает включение только перечисленных далее элементов и их эквивалентов. Кроме того, следует понимать, что такие слова, как «передний», «задний», «левый», «правый», «верхний», «нижний» и т.д. относительны, используются для удобства описания и не должны толковаться как ограничительные.
Подробное описание изобретения
На фиг.1 показана установка 11 для добычи угля, содержащая подвижный добычной или очистной комбайн в виде комбайна 26, который содержит вращающуюся режущую или врубовую головку 34, снабженную несколькими резцами 38, выполненными с возможностью отбивания угля из пласта (не показаны). Режущая головка 34 прикреплена к подвижной стреле 42, обеспечивающей регулировку положения режущей головки 34 относительно подошвы забоя. По мере вращения и продвижения в пласт режущей головки 34 уголь отбивается из забоя и попадает в устройства 36 для сбора и транспортирования установки 11. Устройство 36 выгружает извлеченную породу на отдельные автономные или подвижные устройства для транспортирования (не показаны) для окончательной транспортировки из горной выработки. По мере отбоя породы комбайн продвигается по скребковому конвейеру обычным способом.
В некоторых случаях машинист (не показан) вручную перемещает комбайн вдоль забоя 60 (см. фиг.3) и регулирует положение поворотных рукоятей 42. Машинист взаимодействует с комбайном, подавая команды в контроллер комбайна или систему 52 управления. Контроллер 52 после взаимодействия с программой 64 защиты от подрезки (см. фиг.4) обеспечивает горизонтальное перемещение комбайна (подачу) и перемещение поворотных рукоятей.
Для предотвращения повреждения очистного комбайна 26 в данном изобретении предлагается способ ограничения случайного контакта врубовой головки 34 с подошвой или другими частями лавы (не показаны). Данный способ реализуют в программном обеспечении контроллера 52 комбайна, и в нем используются блок-схемы, показанные на фиг.4-9.
Таким образом, программа 64 защиты от подрезки определяет предельную величину подрезки для конкретного комбайна в конкретном забое, которая является первоначально задаваемой машинистом величиной. Затем она определяет положение поворотной рукояти относительно комбайна путем определения положения поворотной рукояти относительно комбайна, определения поперечного крена комбайна и определения перемещения и направления перемещения комбайна. Если комбайн отходит от забоя штрека, а положение поворотной рукояти ниже предельной величины подрезки, то перемещение комбайна останавливают.
Вдоль забоя выработки расположены щитовые крепи 68 (схематически показаны на фиг.3), закрывающие и защищающие комбайн 26 в лаве. Номера щитовых крепей известны, при этом также известны номера щитовых крепей, расположенных вблизи забоя штрека лавы. Номера щитовых крепей, расположенных между забойной дорожкой и забоем штрека, также известны, при этом они ограничивают место начала забоя штрека и конца забойной дорожки, и наоборот.
Более конкретно, очистной комбайн 26 содержит несколько датчиков, установленных на комбайне и выполненных с возможностью измерения различных рабочих параметров и формирования электрических сигналов, представляющих указанные параметры. Первый из указанных датчиков является инклинометром 56, установленным в точке поворота каждой из поворотных рукоятей 42 и выполненным с возможностью измерения положений каждой из указанных рукоятей относительно комбайна 26, а второй датчик является датчиком 55, установленным на приводных шестернях комбайна и выполненным с возможностью измерения перемещения и направления перемещения комбайна 26. Третий из указанных датчиков является датчиком 54 продольного и поперечного крена и выполнен с возможностью измерения поперечного крена комбайна 26 вдоль забоя (см. фиг.2). При необходимости продольный крен комбайна (не показан) также может учитываться при определении положения поворотной рукояти относительно подошвы забоя.
Более конкретно, способ включает этап получения от первого и второго датчиков электрических сигналов, указывающих на направление перемещения и положение комбайна относительно забоя с полезным ископаемым, и электрических сигналов, указывающих на положение поворотной рукояти относительно комбайна, и этап обработки указанных электрических сигналов в контроллере комбайна для остановки перемещения комбайна, если комбайн покидает забой штрека и если положение поворотной рукояти ниже предельной величины подрезки.
На фиг.4-9 более подробно показана программа для защиты от подрезки в соответствии с данным изобретением. Более конкретно, задание начального параметра запускает программу 64 для защиты от подрезки. Когда этот параметр задан, программа определяет, находится ли комбайн на забойной дорожке, путем сравнения текущего номера щитовой крепи с номерами щитовых крепей, расположенных в забоях штрека (номер текущей крепи>номер крепи забоя штрека), как показано на фиг.З. Если комбайн 26 находится на забойной дорожке, программа ограничивает ход поворотной рукояти или стрелы величиной предельной подрезки путем выполнения операции 73 ограничения левой стрелы и операции 74 ограничения правой стрелы. Если комбайн не находится на забойной дорожке, программа переходит к концевым операциям 70 в забое штрека.
Когда программа 64 выполняет концевые операции 70, программа сначала определяет, в каком направлении перемещается комбайн. Если по номеру конкретной щитовой крепи определено, что комбайн 26 отходит от забоя штрека, выполняют операцию 76 проверки угловых положений стрелы и операцию 78 контроля блокировки подачи. Сначала выполняют операцию 76 и определяют положение поворотной рукояти (угловое положение левой стрелы) с учетом первоначальной величины сдвига (сдвиг левой стрелы) и с поправкой на поперечный крен комбайна (угол поперечного крена комбайна+сдвиг поперечного крена). Затем эту величину сравнивают с предельной величиной подрезки (максимальный угол подрезки), и, если она меньше указанной предельной величины, подачу или перемещение очистного комбайна прекращают. Программа затем выполняет операцию контроля блокировки подачи, при которой вновь проверяют угловое положение стрелы до тех пор, пока угловое положение стрелы не превысит предельную величину подрезки.
Если положение стрелы превышает предельную величину подрезки, блокировку подачи снимают и позволяют комбайну перемещаться по забойной дорожке.
Когда программное обеспечение останавливает комбайн, на экране состояния комбайна появляется сообщение о превышении предельной величины подрезки. Кроме того, в каком-либо месте на комбайне обеспечивается световая сигнализация, однако не все комбайны имеют средства для световой сигнализации. В этом случае комбайн будет работать в нормальном режиме, но не будет возобновлять подачу до тех пор, пока поворотная рукоять не будет поднята до положения, находящегося выше предельной величины параметра. Сообщение сигнализации представляет собой сообщение «Подача отключена - поворотная рукоять ниже предельной величины подрезки». Данная текстовая подсказка сообщает о том, что система управления обнаружила, что поворотная рукоять, находясь на забойной, дорожке достигла предельной величины подрезки. Максимальный угол подрезки определяется параметром.
Возможными причинами указания контроллером на случай подрезки является чрезмерное опускание рукояти машинистом, или нарушение калибровки инклинометра поворотной рукояти, или нарушение калибровки датчика продольного/поперечного крена.
Различные другие признаки данного изобретения изложены в прилагаемой формуле изобретения.
Реферат
Изобретение относится к способу управления режущим органом очистного комбайна двустороннего действия с поворотными барабанами. Технический результат направлен на снижение вероятности подрезания оператором породы ниже забоя, ограничение величины подрезки на забое на участках, отличных от концевых участков забоя, при обеспечении полной подрезки на забоях штрека. Способ управления задним барабаном очистного комбайна с установленными на корпусе датчиками, включает этап получения от первого и второго датчиков сигналов, указывающих на направление перемещения комбайна и положение комбайна относительно забоя с полезным ископаемым, и сигналов, указывающих на положение поворотной рукояти относительно подошвы забоя. Этап определения поперечного крена комбайна. Этап обработки указанных сигналов для определения того, отходит ли комбайн от забоя штрека. Этап определения положения поворотной рукояти. Этап сравнения определенного положения поворотной рукояти с предельной величиной подрезки на забое и этап остановки перемещения комбайна, если указанное определенное положение поворотной рукояти ниже предельной величины подрезки. Этап возобновления перемещения комбайна, когда поворотная рукоять больше не находится ниже предельной величины подрезки. 2 н. и 2 з.п. ф-лы, 9 ил.
Формула
этап получения от первого и второго датчиков сигналов, указывающих на направление перемещения комбайна и положение комбайна относительно забоя с полезным ископаемым, и сигналов, указывающих на положение поворотной рукояти относительно подошвы забоя,
этап определения поперечного крена комбайна,
этап обработки указанных сигналов для определения того, отходит ли комбайн от забоя штрека,
этап определения положения поворотной рукояти,
этап сравнения определенного положения поворотной рукояти с предельной величиной подрезки на забое и
этап остановки перемещения комбайна, если указанное определенное положение поворотной рукояти ниже предельной величины подрезки.
этап получения от первого и второго датчиков сигналов, указывающих на направление перемещения комбайна и положение комбайна относительно забоя с полезным ископаемым, и сигналов, указывающих на положение поворотной рукояти относительно подошвы забоя,
этап определения поперечного крена комбайна,
этап обработки указанных сигналов для определения того, отходит ли комбайн от забоя штрека,
этап сравнения определенного положения поворотной рукояти с предельной величиной подрезки на забое,
этап остановки перемещения комбайна, если положение поворотной рукояти ниже предельной величины подрезки и если комбайн покидает забой штрека,
и этап возобновления перемещения комбайна, когда поворотная рукоять больше не находится ниже предельной величины подрезки.
Комментарии