Быстрое и чувствительное измерение биоинформации - RU2415433C2
Код документа: RU2415433C2
Чертежи
Описание
Изобретение относится к датчикам, в частности биодатчикам и, в особенности, к способам магнитно-активируемого этапа «притягивания» и/или «связывания» в процессе измерения биоинформации с использованием подобных биодатчиков.
Медицинская диагностика, как в центральной лаборатории, так и у постели больного, имеет тенденцию к интеграции и автоматизации. Это обусловлено необходимостью простого выполнения тестов надежным и экономичным способом, при минимальном участии человека. Причем постоянно возрастает потребность в более высокой чувствительности и специфичности обнаружения.
В качестве нового средства для чувствительного обнаружения низких концентраций намеченных молекул в биологических жидкостях для диагностики предложены магнитные биочипы. Подобные магнитные биочипы обладают свойствами, перспективными для биомолекулярной диагностики с точки зрения чувствительности, специфичности, интеграции, удобства применения и затрат. Например, чувствительные магниторезистивные датчики магнитного поля, например супермагниторезистивные (GMR) датчики магнитного поля, можно сочетать с подходящей биохимией для селективного притягивания магнитных гранул, что дает, в результате, миниатюризированный биодатчик, который пригоден для обнаружения в матричной форме. Чувствительность и специфичность срочных исследований обычно обеспечиваются целевым захватом пробных молекул, например, высокоафинной комбинации антитела-антигена. При таком иммунологическом анализе намеченные молекулы помещаются между антителами на твердофазной подложке и меткой, которая обнаруживается датчиком. Обычно такая метка является флуорофором, и для обнаружения применяют планшет-ридер. В большинстве чувствительных анализов исследование выполняется на носителях в виде магнитных гранул, которые можно активировать, поэтому скорость реакции больше не ограничена диффузией, и исследование ускоряется. Магнитное обнаружение естественным образом объединяет активирование и обнаружение с использованием магнитных гранул одновременно в качестве метки и носителя. Кроме такого естественного объединения, магнитное мечение имеет некоторые другие преимущества: биологические жидкости проявляют автофлуоресценцию, но по характеру лишь слабо магнитны, что способствует улучшению порога обнаружения. Магнитное обнаружение магнитных частиц не требует дорогих оптических устройств, но, при этом, характеризуется быстродействием и чувствительностью и, кроме того, хорошо подходит для миниатюрных диагностических систем измерения благодаря возможности непосредственного получения электронных сигналов и небольшому размеру требуемой аппаратуры.
Задачей биодатчика является обнаружение и количественное определение присутствия биологической молекулы в пробе, обычно в растворе. Искомыми свойствами являются высокая чувствительность, высокая специфичность и высокое быстродействие. Кроме того, биодатчик предпочтительно должен быть дешевым, надежным и простым в применении.
Многие десятилетия магнитные частицы использовали в биологии для разделения, экстрагирования и очистки биологических материалов. В последние годы стали разрабатывать биодатчики, основанные на использовании магнитных частиц для активирования, а также обнаружения. В подобных исследованиях магнитные частицы обнаруживаются оптическими способами, электрическими способами, катушками индуктивности или магниторезистивными датчиками. Активирование частиц применяют для создания напряженности, концентрируя частицы вблизи поверхности контакта или усиливая взаимное связывание частиц.
Для повышения чувствительности и быстродействия при анализе сэндвич-методом (сэндвич-анализе) можно применить нижеописанный протокол:
- Диспергирование: Подмешать гранулы в пробу жидкости.
- Захват: Предоставить объектам анализа возможность связывания с гранулами.
- Притягивание: Подвести гранулы к поверхности связывания сенсорного устройства.
- Связывание: Предоставить гранулам возможность создания биологических связей с областью связывания или центрами связывания датчика. Поверхность связывания датчика содержит участок, который химически и/или биохимически подготовлен к поддержке связывания частиц, в частности с помощью селективных биохимических связей. В случае многослойной формы (сэндвич-формы) биохимическая связь включает в себя, по меньшей мере, следующие элементы: площадку на поверхности связывания датчика, первый связывающий объект, объект анализа, второй связывающий объект и гранулу.
- Повышение специфичности (т.е. селективное удаление): Удалить несвязанные и слабо связанные гранулы с поверхности связывания сенсорного устройства магнитным или немагнитным методом. Определить относительные усилия связывания.
Этап захвата можно очень существенно ускорить обеспечением высокого отношения поверхности к объему, т.е. диспергированием очень мелких частиц в растворе. Однако это полезно только в том случае, когда другие этапы также допускают очень существенное ускорение. Однако термодиффузия вызывает лишь очень медленный перенос субмикронных гранул к поверхности связывания. Перенос можно ускорить приложением градиента магнитного поля, например, с помощью постоянного магнита (например, как в работе Perrin, J.Immun.Meth., 224, 77 (1999)).
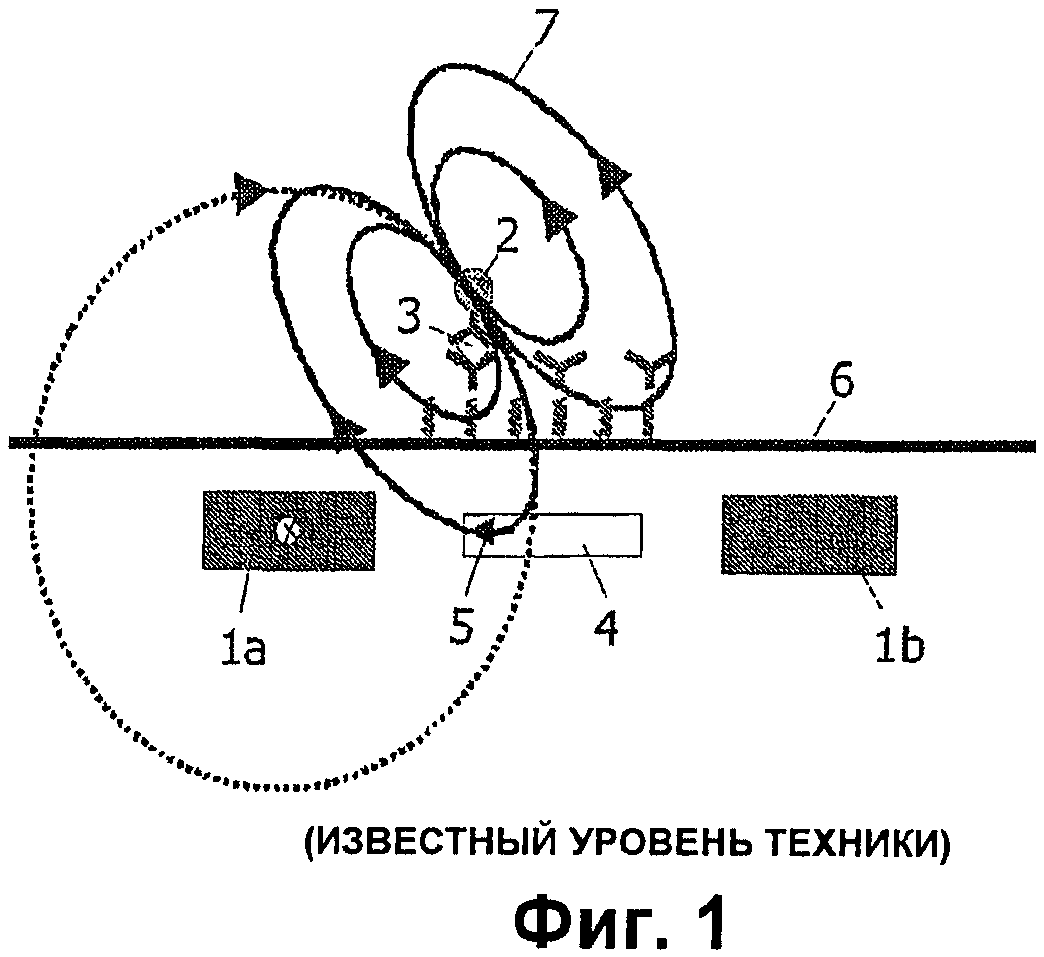
Кроме того, биодатчик, содержащий матрицу датчиков, например, из 100 датчиков, основанных на магнитном обнаружении магнитных гранул, например, суперпарамагнитных гранул, можно использовать для одновременного измерения концентрации большого числа разных биологических молекул (например, белков, ДНК) в растворе (например, крови). Это можно обеспечить соединением магнитных гранул с намеченной молекулой, намагничиванием данных гранул прилагаемым магнитным полем и использованием супермагниторезистивного (GMR) датчика для обнаружения поля рассеяния намагниченных гранул, причем поле рассеяния зависит от концентрации. На фиг.1 изображен пример комплексного возбуждения. Ток, протекающий по проводу 1a, создает магнитное поле, которое намагничивает магнитную гранулу 2, которая соединяется с намеченной молекулой 3. Следовательно, каждая гранула 2, присутствующая на поверхности 6 связывания сенсорного устройства, создает магнитный момент m, обозначенный силовыми линиями 7 поля. Поле рассеяния от магнитной гранулы 2 создает плоскостную компоненту Hext намагничивания в GMR-датчике 4, которая вызывает изменение ΔRGMR(Hext) сопротивления. На фиг.1 расположенная в плоскости компонента Hext показана стрелкой 5.
Чтобы обеспечить сокращение времени анализа, магнитные гранулы 2 следует активировать магнитным способом, т.е. магнитным воздействием для притягивания к поверхности 6 связывания. Соответственно, процесс связывания должен происходить как можно эффективнее. Это означает, что (i) частицы должны концентрироваться в зонах связывания с самой высокой чувствительностью обнаружения датчиками и (ii) что все частицы должны обладать оптимальными возможностями образования искомых (био)химических связей с поверхностью связывания. Недостаток притягивания большим внешним постоянным магнитом состоит в том, что магнитные частицы образуют крупные и неподвижные скопления на поверхности, что обеспечивает оптимальные условия связывания с поверхностью связывания. Кроме того, магниты могут создавать сильные плоскопараллельные магнитные поля 5, которые сказываются на чувствительности магнитного датчика вследствие смещения рабочей точки на нелинейной характеристике изменения сопротивления R(H) датчика. Кроме того, сильные магнитные поля могут дезориентировать датчик и вызвать нарастание магнитного поля в датчике из-за гистерезиса его характеристики.
Задачей настоящего изобретения является создание усовершенствованных устройств и способов измерения биоинформации. Преимуществом вариантов осуществления настоящего изобретения может быть оптимизация процесса «связывания», например, путем повышения эффективности контакта (для максимального повышения скорости специфического биологического связывания, когда гранула находится около поверхности связывания) и/или увеличения времени контакта (общего времени, в течение которого отдельные гранулы находятся в контакте с поверхностью связывания). Преимуществом вариантов осуществления настоящего изобретения может быть повышение быстродействия обнаружения намеченных молекул в жидкости при использовании магнитных частиц в качестве меток в сенсорном устройстве, например магнитном сенсорном устройстве для обнаружения магнитных частиц. Преимуществом настоящего изобретения является датчик, пригодный для высокоскоростного измерения биоинформации. Способы и устройства в соответствии с вариантами осуществления настоящего изобретения допускают обнаружение намеченных молекул, например, белков, антител, нуклеиновых кислот (например, ДНК, РНК), пептидов, олиго- или полисахаридов или сахаров, в жидкостях, например, биологических жидкостях типа слюны, мокроты, крови, плазмы крови, тканевой жидкости или мочи, с высокими чувствительностью и специфичностью.
Вышеупомянутые задачи решаются с помощью способа и устройства в соответствии с настоящим изобретением.
Частные и предпочтительные аспекты изобретения изложены в прилагаемых независимых и зависимых пунктах формулы изобретения. Признаки зависимых пунктов формулы изобретения можно объединять с признаками независимых пунктов формулы изобретения и с признаками других зависимых пунктов формулы изобретения, по обстоятельствам, и не только так, как прямо изложено в формуле изобретения.
В соответствии с первым аспектом настоящего изобретения предлагается сенсорное устройство, например магнитное сенсорное устройство, для обнаружения магнитных частиц, при этом сенсорное устройство имеет поверхность связывания с центрами связывания на данной поверхности и содержит:
- по меньшей мере, один чувствительный элемент для обнаружения присутствия магнитных частиц,
- средство для притягивания магнитных структур к поверхности и на поверхность связывания сенсорного устройства, причем упомянутые магнитные структуры содержат, по меньшей мере, одну магнитную частицу,
- средство для изменения порядка и рандомизации расположения отдельных магнитных частиц относительно центров связывания на поверхности связывания, чтобы предоставить центрам связывания на всех отдельных магнитных частицах большую вероятность наличия времени контакта с центрами связывания на поверхности связывания.
Изменение порядка и рандомизация расположения отдельных магнитных частиц относительно центров связывания на поверхности связывания обеспечивает улучшенное связывание магнитных частиц в центрах связывания. Отдельные магнитные частицы могут быть частицами, которые входят в состав многочастичной магнитной структуры.
Сенсорное устройство в соответствии с вариантами осуществления настоящего изобретения может дополнительно содержать средство создания поля, в частности средство создания магнитного поля, выполненное с возможностью формирования многочастичных магнитных структур, имеющих продольную ось, по существу, параллельную поверхности связывания сенсорного устройства, при этом упомянутые многочастичные магнитные структуры содержат множество отдельных магнитных частиц.
Путем формирования многочастичных магнитных структур, имеющих продольную ось, по существу параллельную поверхности связывания сенсорного устройства, можно добиться небольшого расстояния между большинством частиц или гранул и поверхностью связывания, так как многочастичные магнитные структуры ориентируются вдоль поверхности связывания.
В предпочтительном варианте, по меньшей мере, один чувствительный элемент может представлять собой магнитный чувствительный элемент, например, GMR (супермагниторезистивный), TMR (туннельный магниторезистивный) или AMR (анизотропный магниторезистивный) чувствительный элемент или чувствительный элемент на эффекте Холла, но может быть также другим чувствительным элементом, например, оптическим чувствительным элементом. Следовательно, вместо магнитного обнаружения частиц частицы можно также обнаруживать оптическим методом.
Что касается магнитных частиц, присутствующих в объеме пробы, средство для изменения порядка и рандомизации расположения отдельных магнитных частиц может быть выполнено таким образом, чтобы отдельные магнитные частицы откреплялись от поверхности связывания так, что 90% отдельных магнитных частиц, которые входят в состав магнитной структуры, например, самой отдельной частицы или многочастичной структуры остается в пределах, самое большее, 10% от объема пробы. Следовательно, во время изменения порядка и рандомизации магнитные частицы не отходят далеко от поверхности связывания в направлении, по существу, перпендикулярном поверхности связывания. Магнитные частицы предпочтительно остаются не дальше чем 100 мкм от поверхности связывания и, в более предпочтительном варианте, остаются не дальше чем 10 мкм от поверхности связывания в направлении, по существу, перпендикулярном поверхности связывания. Рандомизация магнитных частиц может выполняться, например, изменением градиента магнитного поля во времени, по величине, по частоте (в зависимости от величины и магнитной анизотропии магнитных частиц) или по направлению. В альтернативном варианте, чтобы рандомизировать магнитные частицы, их можно возбуждать вибрацией или воздействием потока жидкости.
Датчик может быть в форме одноразовой кассеты с кассетным устройством считывания для обеспечения считывания с датчика. Датчик может быть частично или полностью интегрированным в полупроводниковую микросхему. Средство создания поля, выполненное с возможностью формирования многочастичных магнитных структур, может представлять собой, в соответствии с вариантами осуществления изобретения, внутреннее микросхемное средство создания магнитного поля, например, токоведущие провода, или внемикросхемное средство создания магнитного поля. Внемикросхемное средство создания магнитного поля может представлять собой средство создания магнитного поля, присутствующее в одноразовой кассете для биодатчика, а не на микросхеме, или данное средство может присутствовать в кассетном устройстве считывания.
В предпочтительном варианте микросхема и кассета выполнены из материалов, которые пригодны для дешевого массового производства, например, из органических или неорганических материалов, например, кремния, стекла, пластиков, композитных материалов, керамики и т.п.
В соответствии с вариантами осуществления изобретения многочастичные структуры могут представлять собой цепочки магнитных частиц, кольца магнитных частиц, кластеры магнитных частиц или другие известные многочастичные структуры. Данные структуры имеют продольную ось, расположенную, по существу, в плоскости, т.е. ось, расположенную в одной плоскости. Ориентация продольной оси зависит от ориентации прилагаемых магнитных полей. Продольная ось может быть прямой или искривленной.
Средство для притягивания магнитных структур, например, отдельных частиц или многочастичных структур к поверхности и на поверхность связывания сенсорного устройства может быть внутренним микросхемным или внемикросхемным средством. Средство для притягивания упомянутых магнитных структур, например, отдельных частиц или многочастичных структур к поверхности и на поверхность связывания сенсорного устройства может быть внутренним микросхемным или внемикросхемным элементом, обладающим относительной магнитной проницаемостью больше единицы, т.е. средство для притягивания упомянутых магнитных структур, например, отдельных частиц или многочастичных структур может содержать магнитопровод. Внутренний микросхемный или внемикросхемный элемент может быть элементом типа MEMS (микроэлектромеханической системой), который может изменять положение или форму, чтобы изменять градиент магнитного поля для притягивания магнитных структур, например, отдельных частиц или многочастичных структур к поверхности и на поверхность связывания сенсорного устройства.
В одном конкретном варианте осуществления изобретения средство для притягивания магнитных структур, например, отдельных частиц или многочастичных структур к поверхности и на поверхность связывания сенсорного устройства может содержать первый токоведущий провод и, по меньшей мере, один дополнительный токоведущий провод. В другом варианте осуществления средство для притягивания магнитных структур, например, отдельных частиц или многочастичных структур может представлять собой упорядоченное множество токоведущих проводов.
В соответствии со вторым аспектом настоящего изобретения предлагается способ для процесса измерения биоинформации, при этом процесс измерения биоинформации заключается в обнаружении магнитных частиц посредством сенсорного устройства, обладающего поверхностью связывания с центрами связывания на данной поверхности. Способ содержит следующие этапы:
- притягивают упомянутые магнитные структуры, содержащие, по меньшей мере, одну магнитную частицу к поверхности и на поверхность связывания сенсорного устройства,
- изменяют порядок и рандомизируют расположение отдельных магнитных частиц относительно центров связывания на поверхности связывания, чтобы предоставить центрам связывания на всех отдельных магнитных частицах большую вероятность наличия времени контакта с центрами связывания на поверхности связывания.
Что касается магнитных частиц, присутствующих в объеме пробы, изменение порядка и рандомизация расположения отдельных магнитных частиц могут выполняться таким образом, чтобы отдельные магнитные частицы откреплялись от поверхности связывания так, что 90% отдельных магнитных частиц, которые входят в состав магнитной структуры, например, самой отдельной частицы или многочастичной структуры остается в пределах, самое большее, 10% или менее от объема пробы. Следовательно, во время изменения порядка и рандомизации магнитные частицы не отходят далеко от поверхности связывания в направлении, по существу, перпендикулярном поверхности связывания. Магнитные частицы предпочтительно остаются не дальше чем 100 мкм от поверхности связывания и, в более предпочтительном варианте, остаются не дальше чем 10 мкм от поверхности связывания в направлении, по существу, перпендикулярном поверхности связывания датчика.
Способ в соответствии с вариантами осуществления настоящего изобретения может дополнительно содержать этап приложения магнитного поля, настроенного на формирование многочастичных магнитных структур, имеющих продольную ось, по существу параллельную поверхности связывания сенсорного устройства, при этом многочастичные магнитные структуры содержат множество отдельных магнитных частиц.
Приложение магнитного поля для создания многочастичных структур можно осуществлять путем приложения формирующего цепочки магнитного поля для формирования цепочек магнитных частиц.
В соответствии с вариантами осуществления изобретения притягивание магнитных структур, например, отдельных частиц или многочастичных структур к поверхности и на поверхность связывания датчика можно осуществлять путем приложения внутреннего микросхемного или внемикросхемного магнитного поля. В некоторых вариантах осуществления притягивание магнитных структур, например, отдельных частиц или многочастичных структур можно осуществлять путем приложения градиента магнитного поля в направлении, по существу, перпендикулярном поверхности связывания сенсорного устройства.
Сенсорное устройство, если это магнитное сенсорное устройство, может содержать, по меньшей мере, один магнитный чувствительный элемент с одним направлением чувствительности, и притягивание магнитных структур, например, отдельных частиц или многочастичных структур к поверхности и на поверхность связывания можно осуществлять путем приложения магнитного поля в направлении чувствительности магнитного чувствительного элемента. В других вариантах осуществления изобретения сенсорное устройство может содержать, по меньшей мере, первый и второй токоведущие провода, и притягивание магнитных структур, например, отдельных частиц или многочастичных структур к поверхности и на поверхность связывания можно осуществлять путем пропускания первого тока по первому токоведущему проводу и пропускания второго тока по второму токоведущему проводу. Первый и второй токи могут быть равны по величине. Они могут быть противоположно направлены. В других дополнительных вариантах осуществления притягивание магнитных структур, например, отдельных частиц или многочастичных структур к поверхности и на поверхность связывания можно осуществлять посредством упорядоченного множества токоведущих проводов.
В других вариантах осуществления изобретения формирование многочастичных структур, имеющих продольную ось, по существу параллельную поверхности связывания, может заключаться в том, что:
- прилагают первое магнитное поле для формирования в неплоскостных многочастичных структур, т.е. многочастичных структур, которые не расположены, по существу, параллельно поверхности связывания,
- затем прилагают второе магнитное поле для ориентирования многочастичных структур так, чтобы их продольная ось установилась, по существу, в плоскости, по существу, параллельной поверхности связывания сенсорного устройства.
Затем магнитное поле можно вращать для обеспечения максимального контакта между отдельными магнитными частицами и поверхностью связывания.
Вышеупомянутые и другие характеристики, признаки и преимущества настоящего изобретения становятся очевидными из нижеследующего подробного описания, приведенного в связи с прилагаемыми чертежами, которые поясняют на примерах принципы изобретения. Настоящее описание приведено только для примера и не ограничивает объем изобретения. Ссылки на указанные ниже фигуры относятся к прилагаемым чертежам.
Фиг.1 представляет изображение магнитного датчика в соответствии с известным уровнем техники.
Фиг.2 - изображение взаимодействий магнитных гранул и образования цепочки в присутствии однородного магнитного поля.
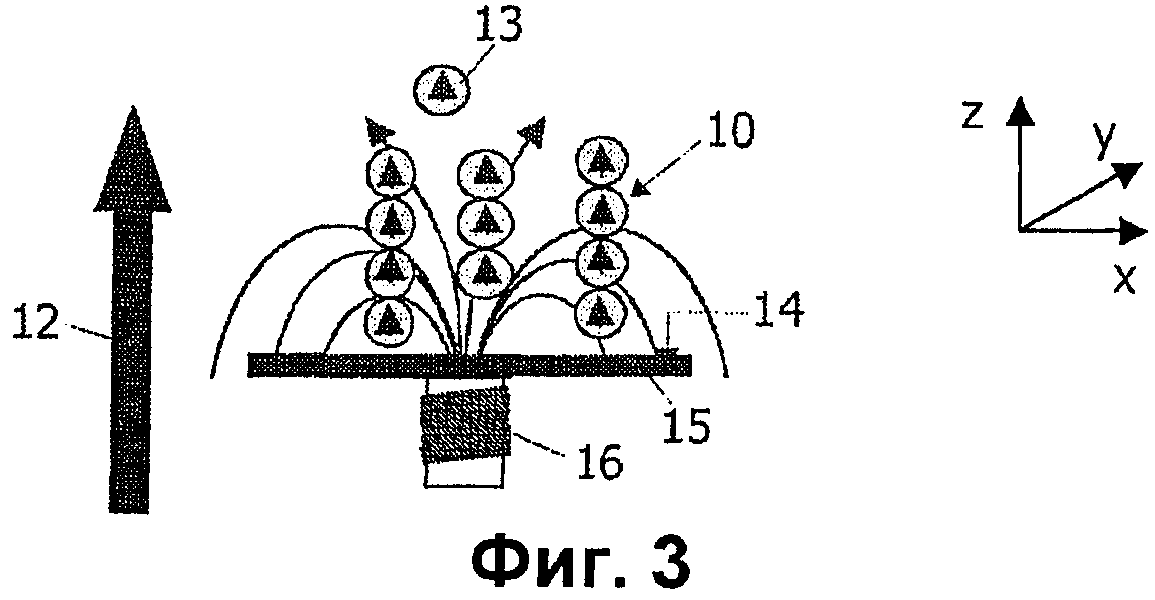
Фиг.3 - изображение столбиков из магнитных гранул, образуемых намагниченными гранулами в однородном магнитном поле.
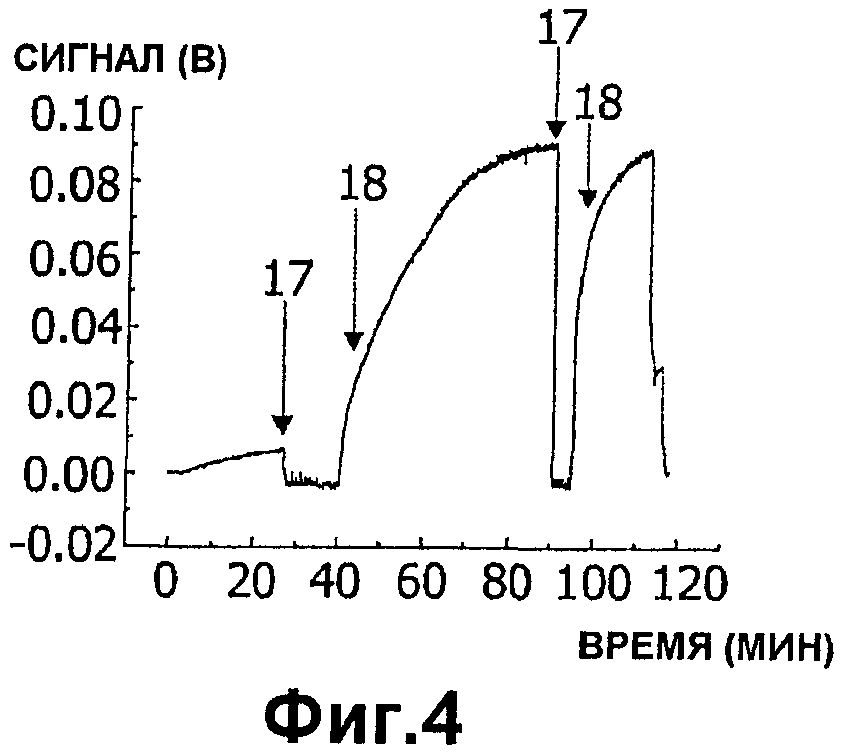
Фиг.4 - пояснение эффекта отталкивания и притягивания столбиков из магнитных гранул от/к поверхности магнитного датчика в соответствии с вариантом осуществления настоящего изобретения.
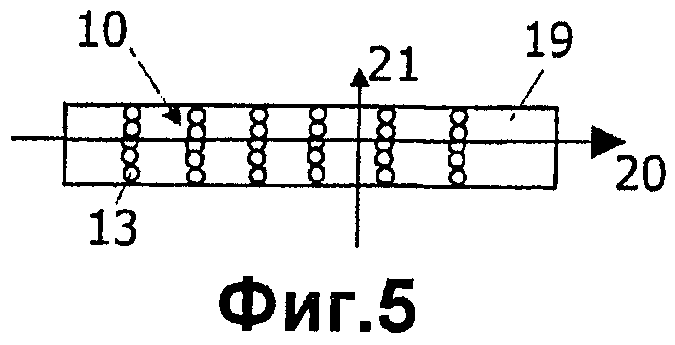
Фиг.5 - вид сверху на токоведущий провод в соответствии с вариантом осуществления настоящего изобретения.
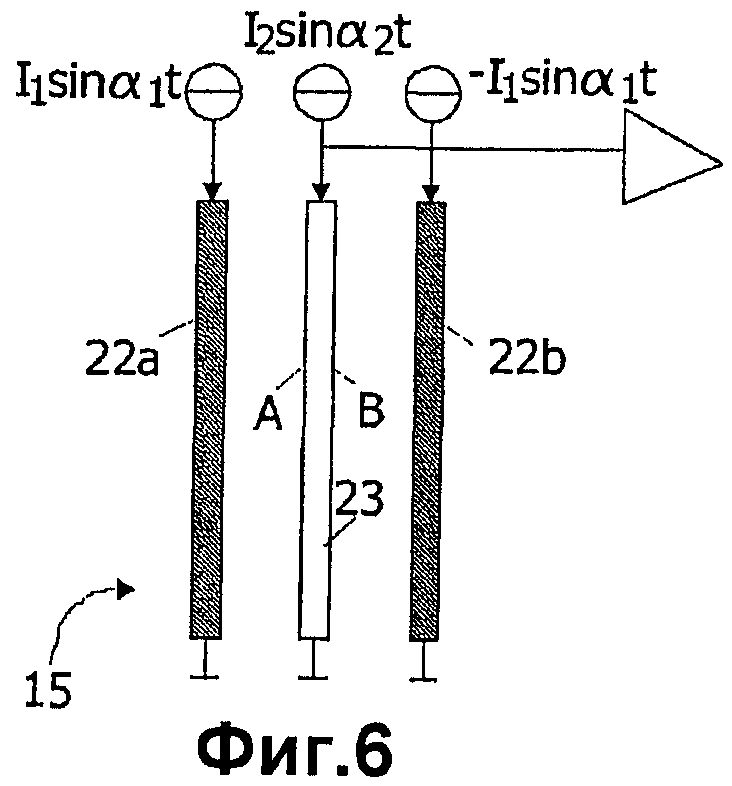
Фиг.6 - изображение конфигурации датчика в соответствии с вариантом осуществления изобретения для притягивания гранул к поверхности связывания сенсорного устройства.
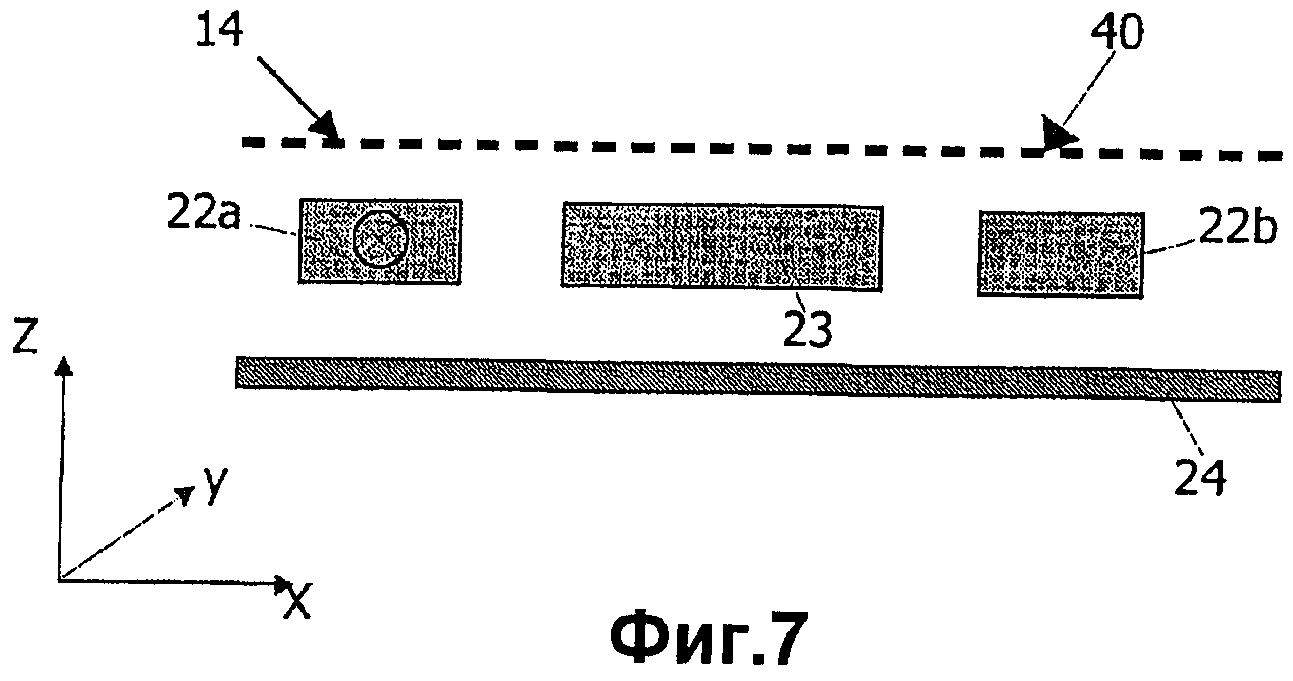
Фиг.7 - поперечное сечение датчика в конфигурации, показанной на фиг.6.
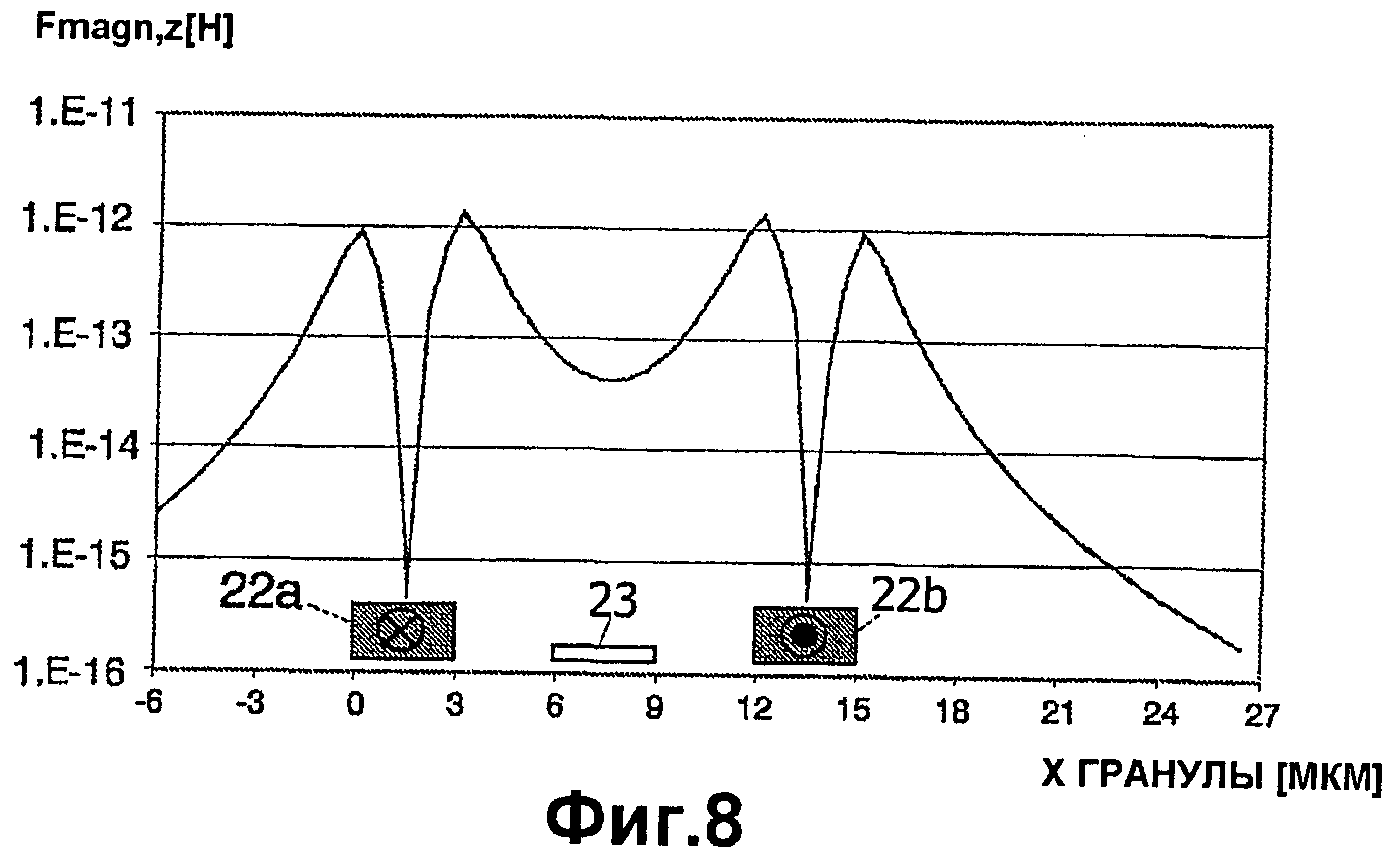
Фиг.8 - диаграмма вертикальной магнитной силы на расстоянии z=0,64 мкм от поверхности связывания в виде функции положения гранул для датчика в конфигурации, показанной на фиг.6 и 7.
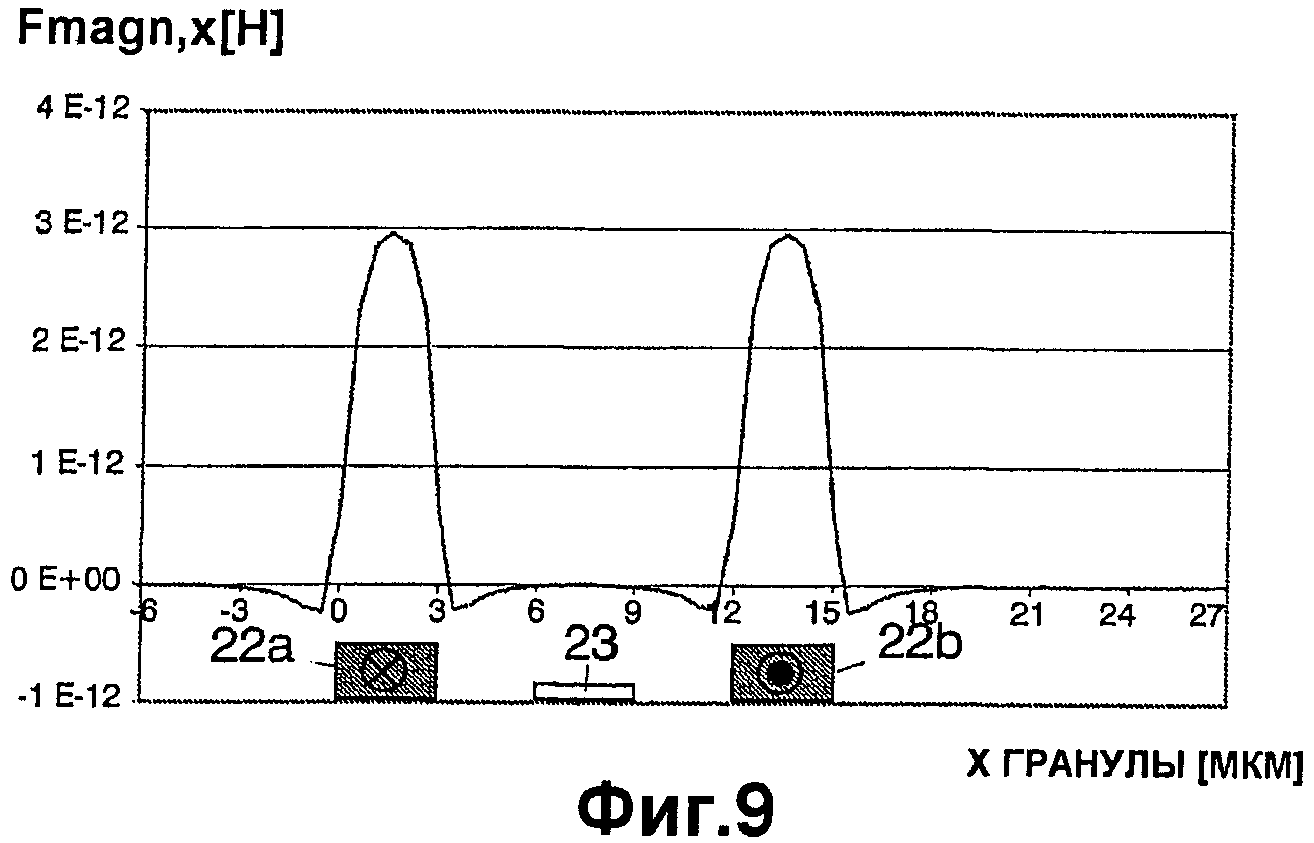
Фиг.9 - диаграмма горизонтальной магнитной силы на расстоянии z=0,64 мкм от поверхности связывания в виде функции положения гранул для датчика в конфигурации, показанной на фиг.6 и 7.
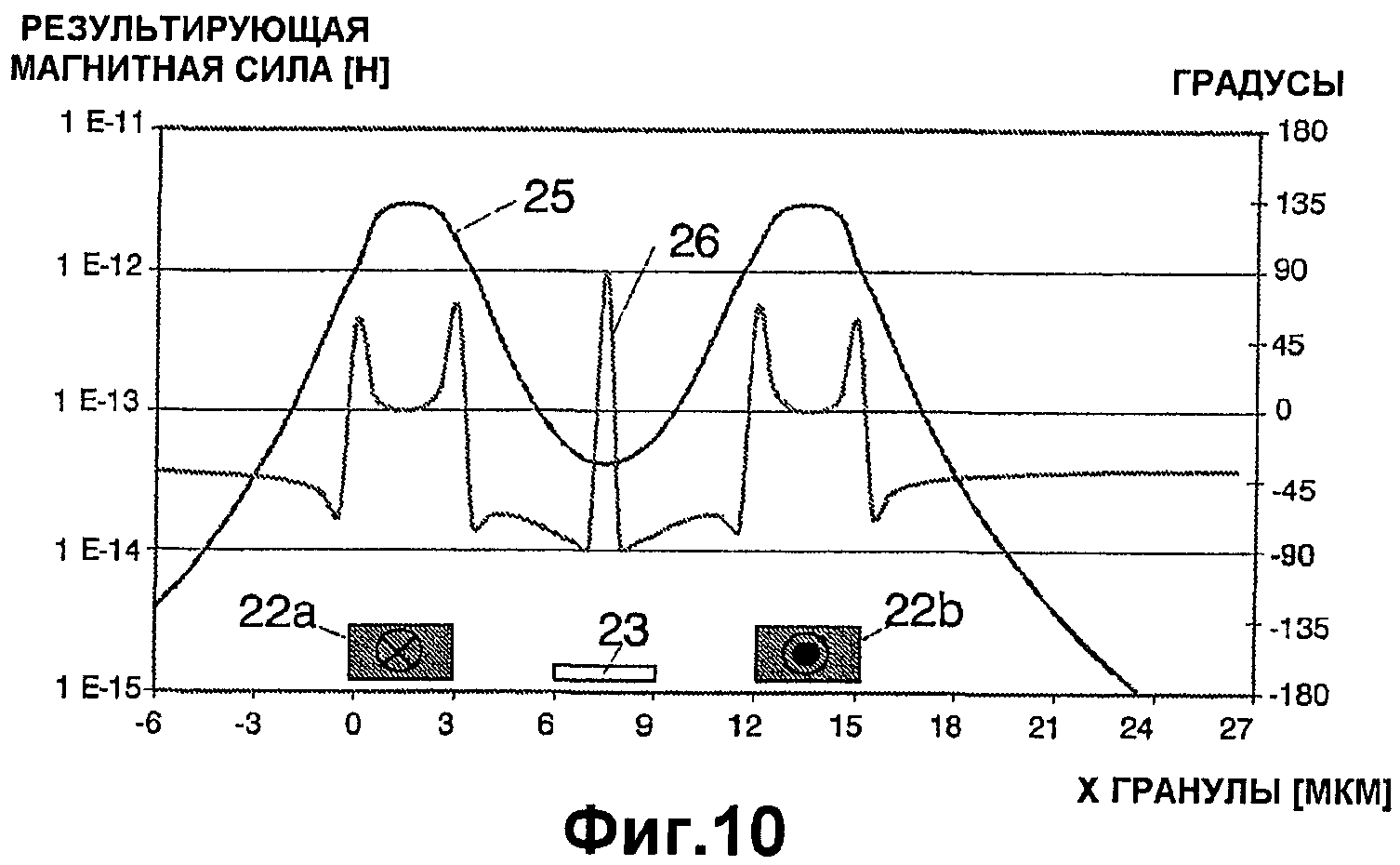
Фиг.10 - диаграмма величины и фазы магнитной силы на расстоянии z=0,64 мкм от поверхности связывания в виде функции положения гранул для датчика в конфигурации, показанной на фиг.6 и 7.
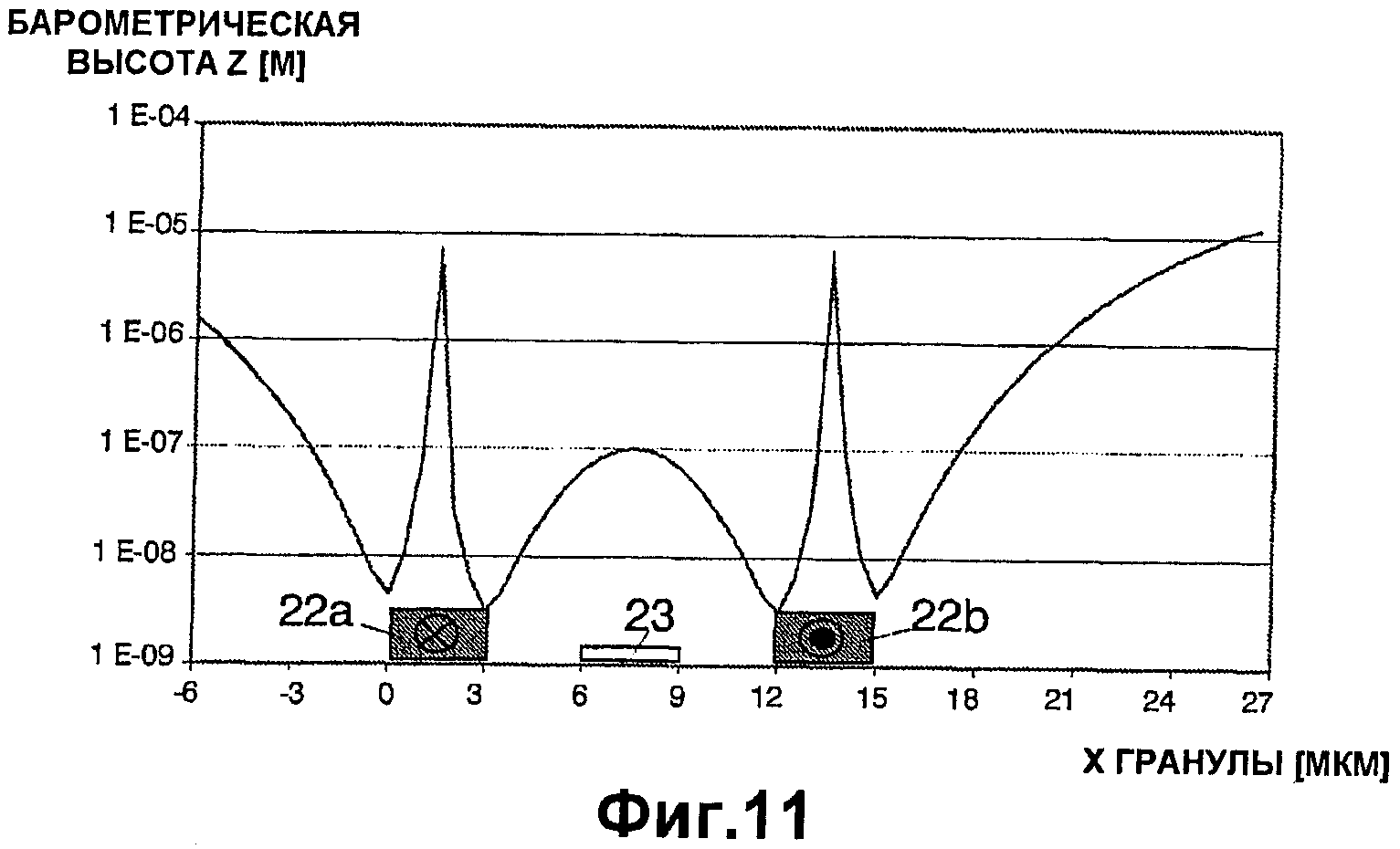
Фиг.11 - диаграмма локальной барометрической высоты на расстоянии z=0,64 мкм от поверхности связывания для гранул в окрестности датчика в конфигурации, показанной на фиг.6 и 7.
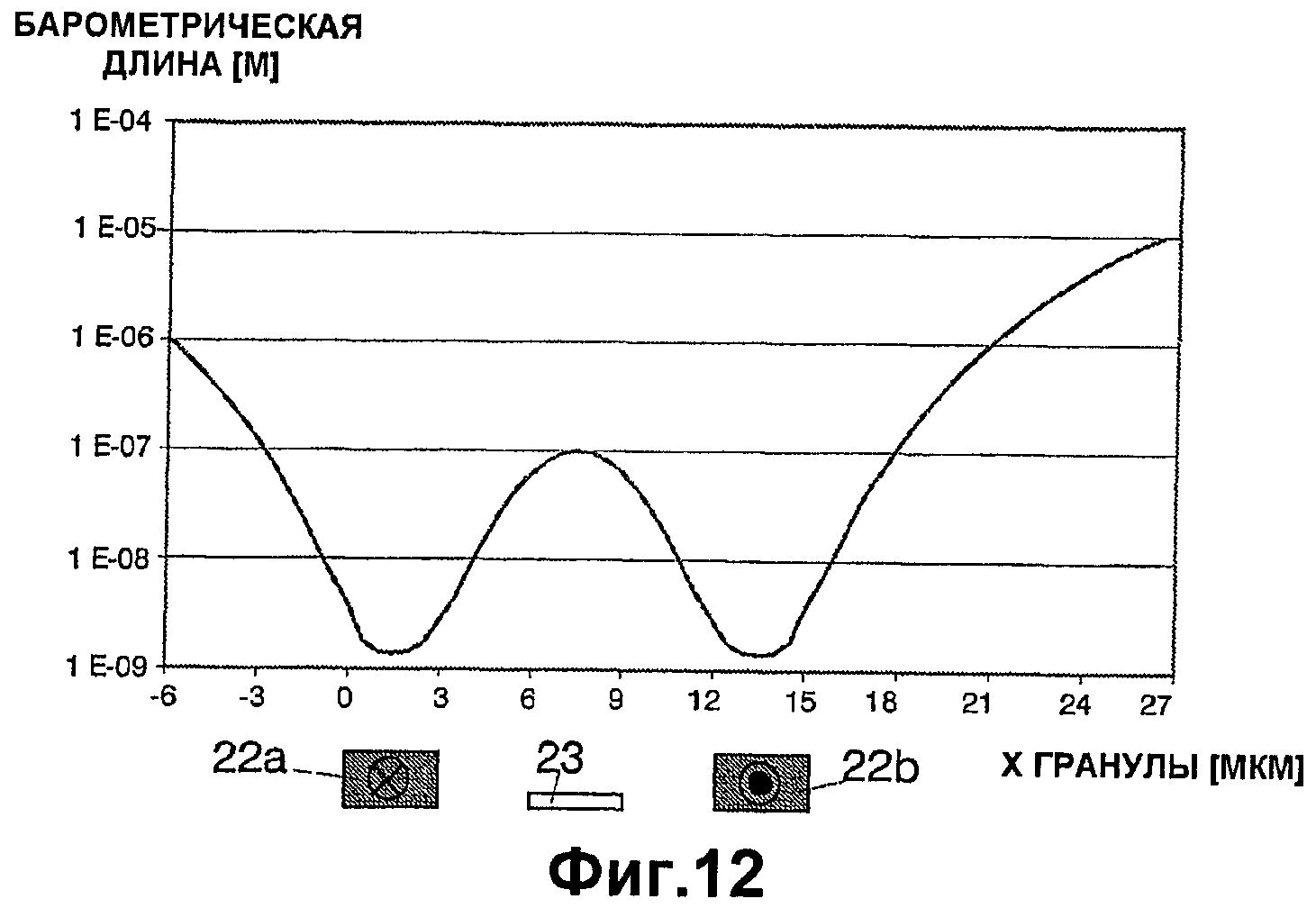
Фиг.12 - диаграмма локальной барометрический длины на расстоянии z=0,64 мкм от поверхности связывания, для гранул в окрестности датчика в конфигурации, показанной на фиг.6 и 7.
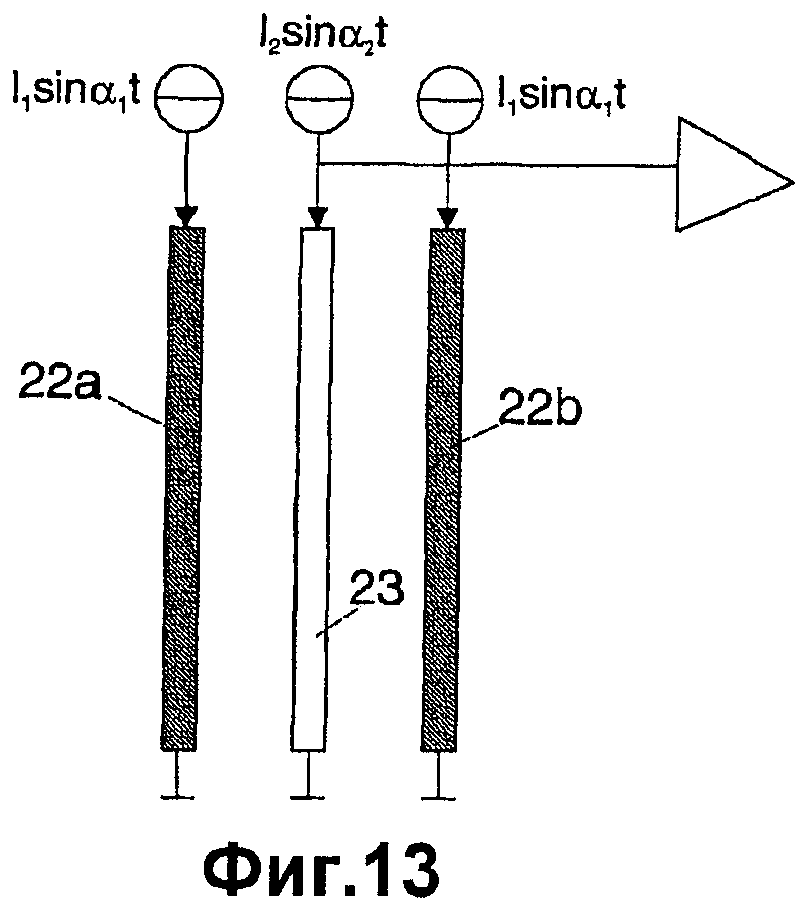
Фиг.13 - изображение конфигурации датчика для обнаружения гранул в соответствии с вариантом осуществления изобретения.
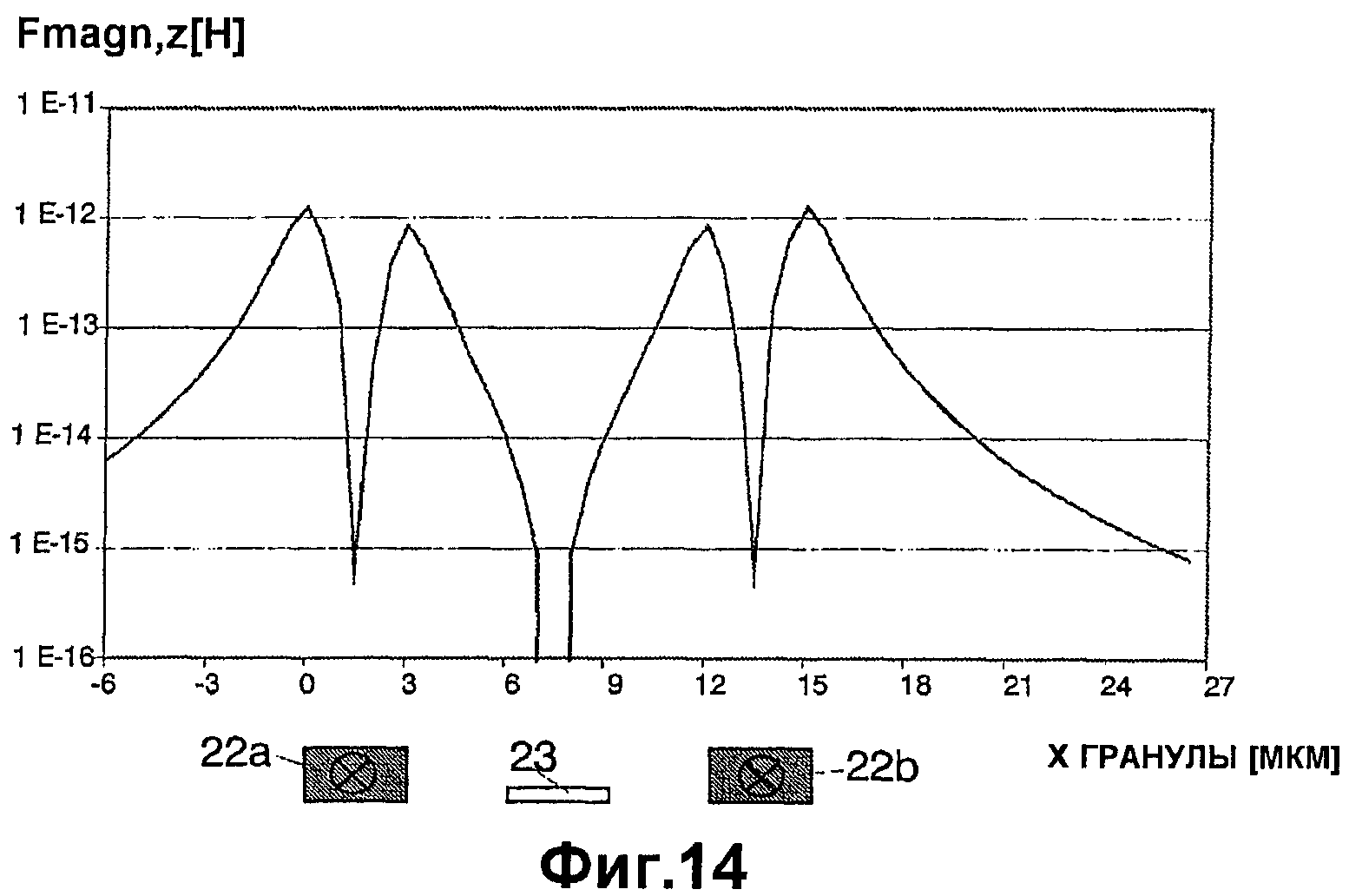
Фиг.14 - диаграмма вертикальной магнитной силы на расстоянии z=0,64 мкм от поверхности связывания в виде функции положения гранул для датчика в конфигурации, показанной на фиг.13.
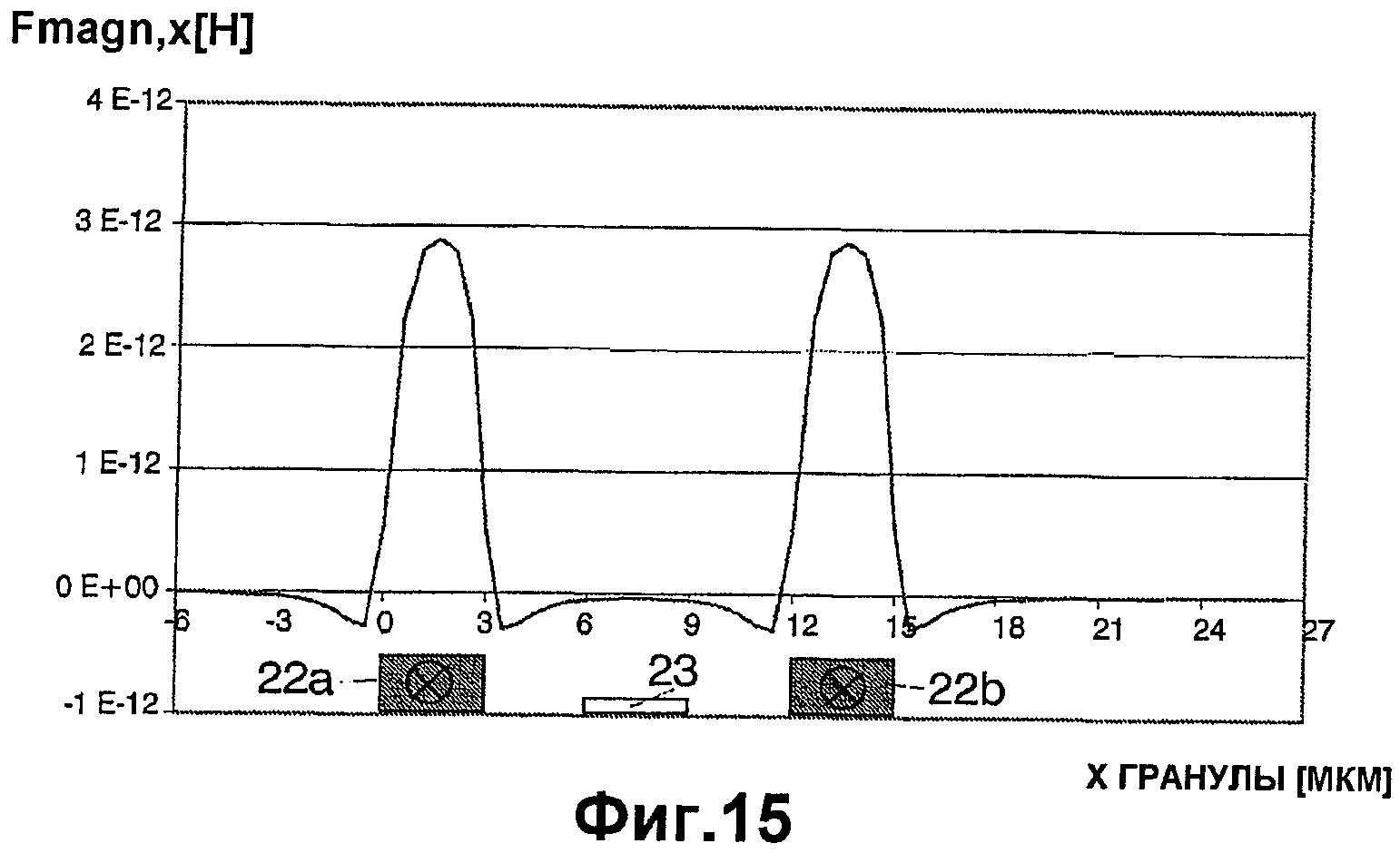
Фиг.15 - диаграмма горизонтальной магнитной силы на расстоянии z=0,64 мкм от поверхности связывания в виде функции положения гранул для датчика в конфигурации, показанной на фиг.13.
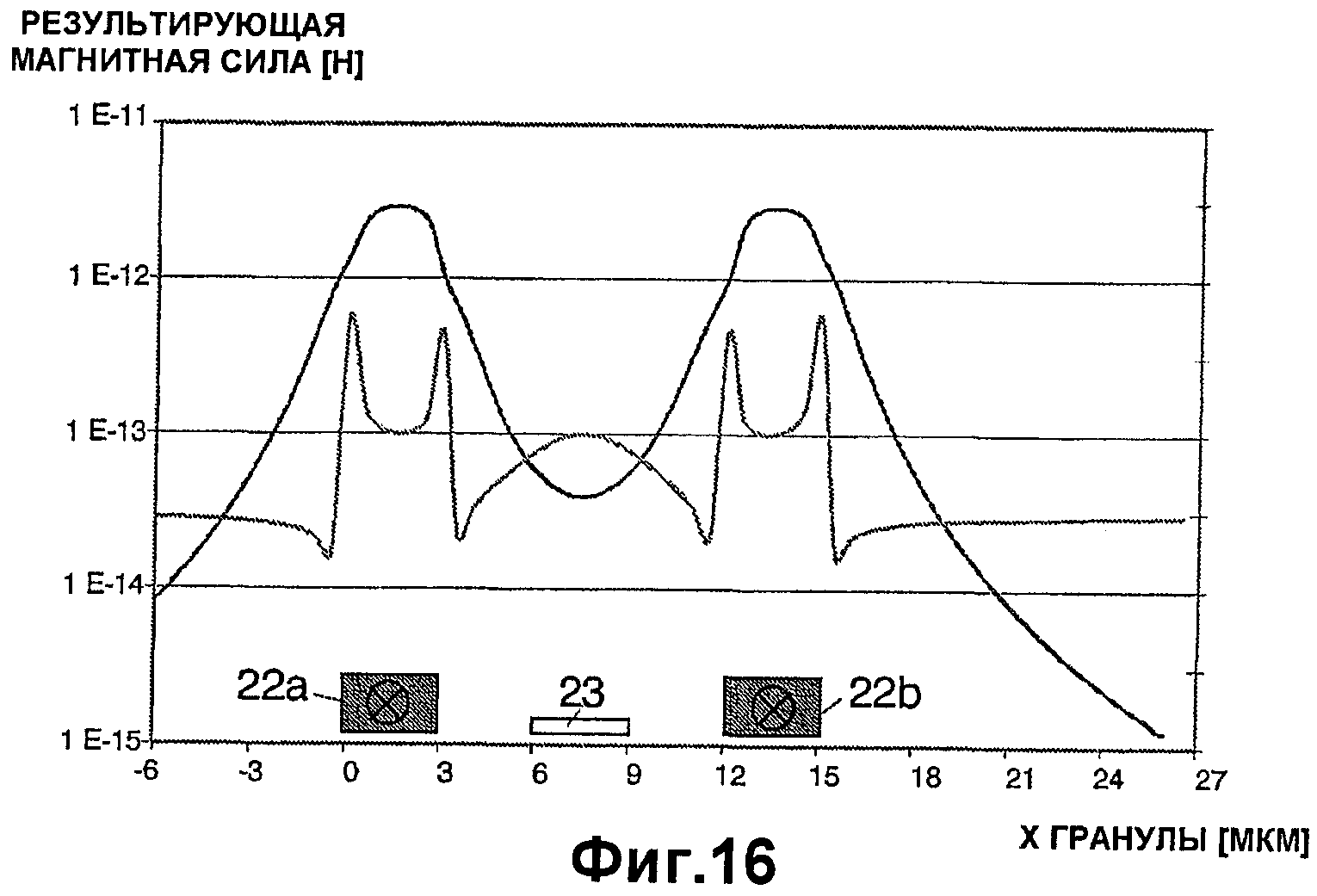
Фиг.16 - диаграмма величины и фазы магнитной силы на расстоянии z=0,64 мкм от поверхности связывания в виде функции положения гранул для датчика в конфигурации, показанной на фиг.13.
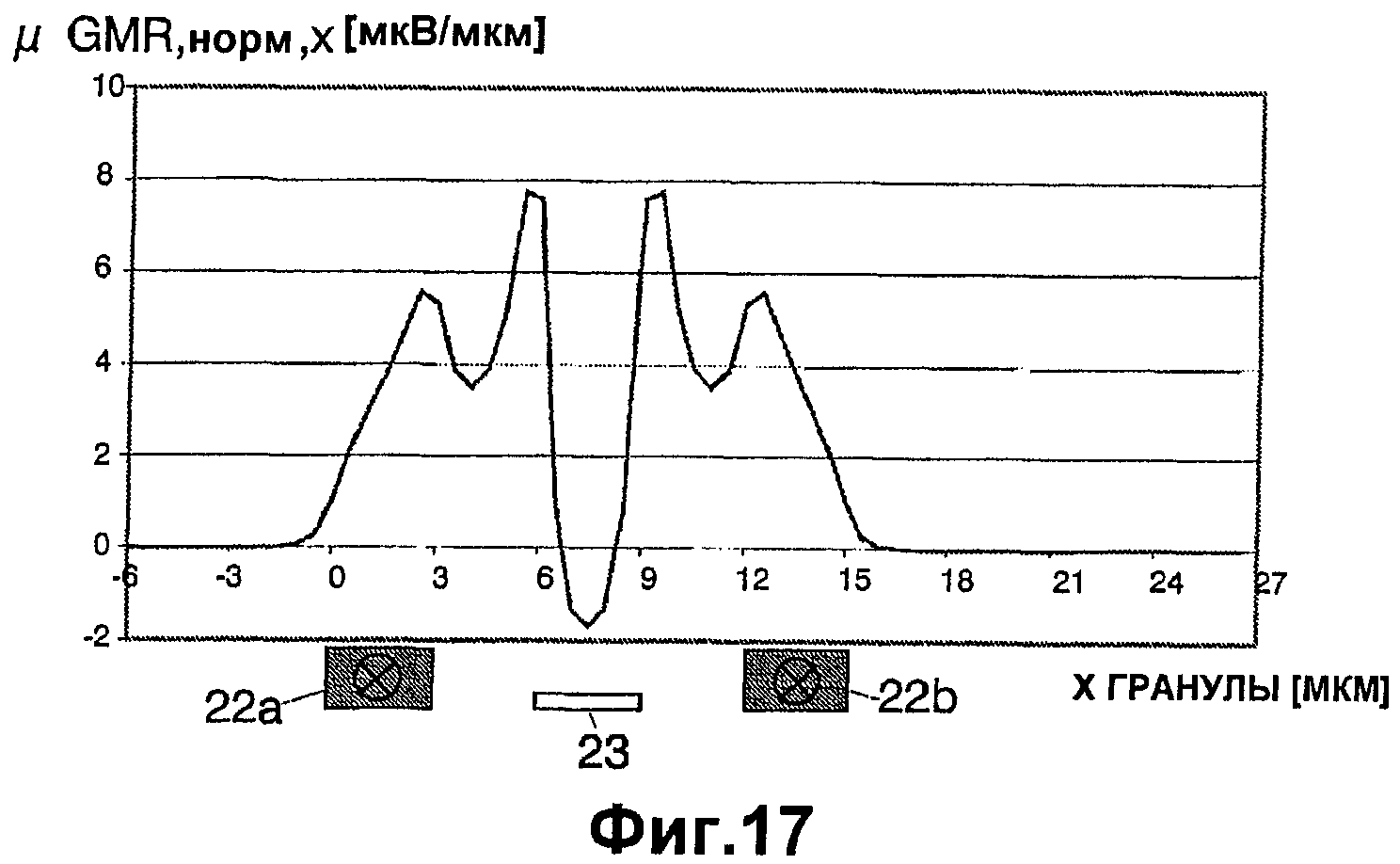
Фиг.17 - диаграмма чувствительности в синфазном режиме на расстоянии z=0,64 мкм от поверхности связывания для датчика в конфигурации, показанной на фиг.13.
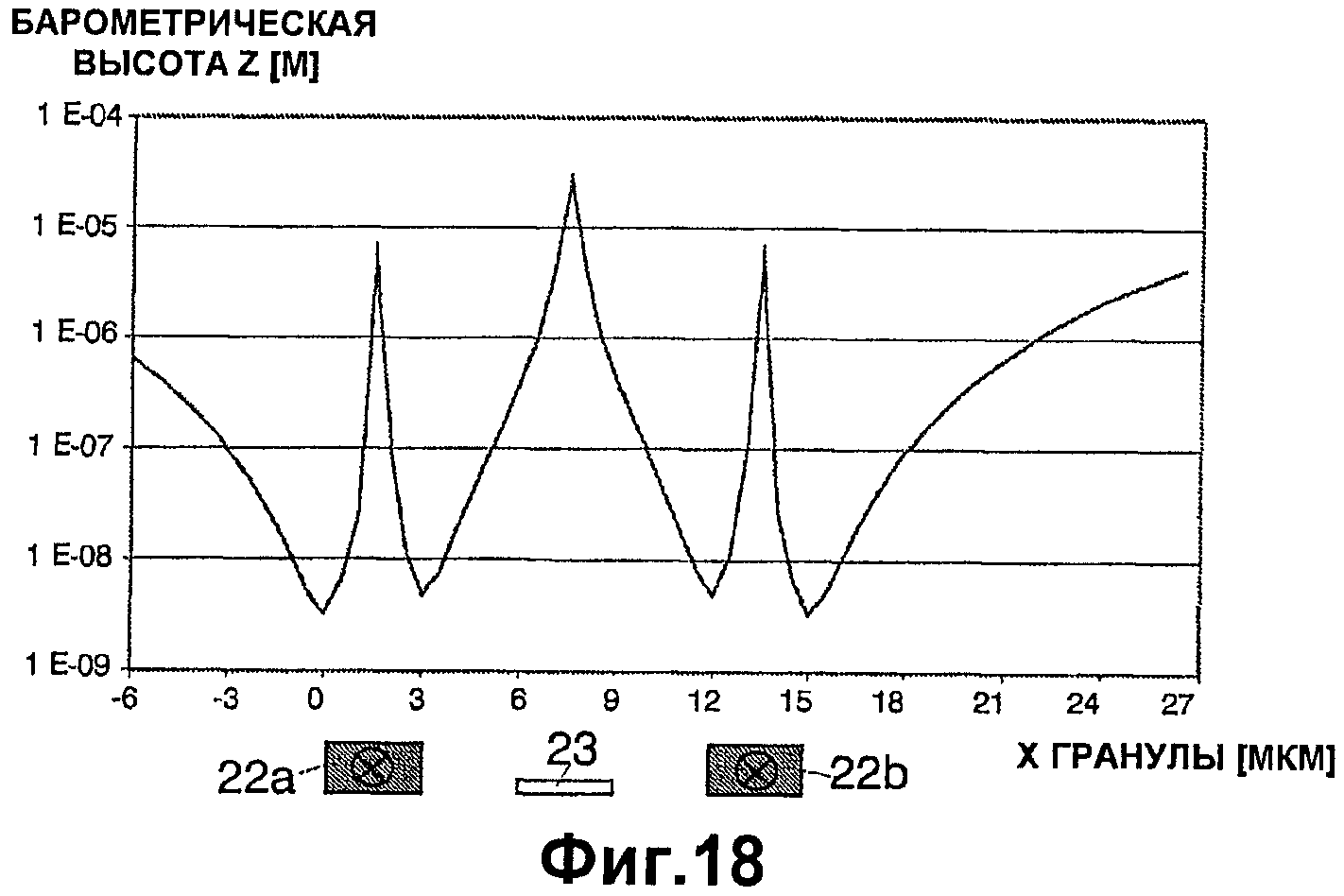
Фиг.18 - диаграмма локальной барометрической высоты на расстоянии z=0,64 мкм от поверхности связывания для гранул в окрестности датчика в конфигурации, показанной на фиг.13.
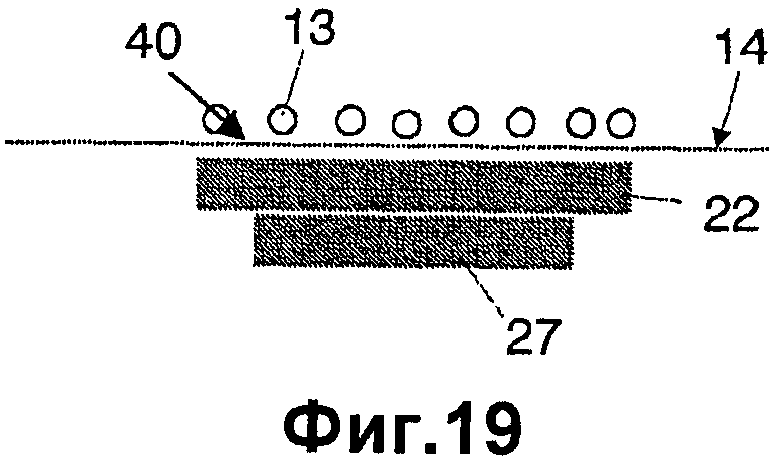
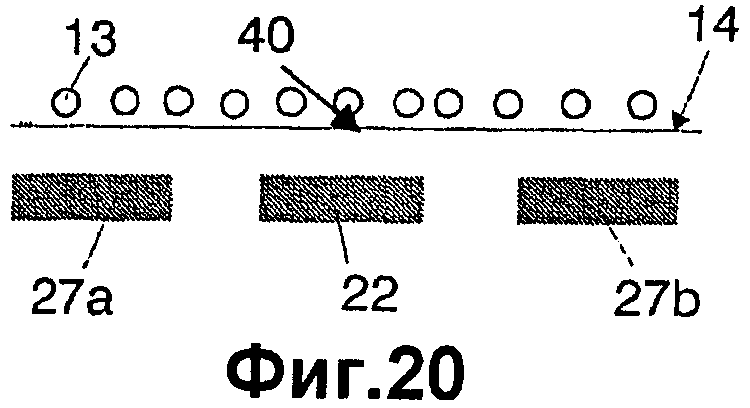
Фиг.19 и 20 - поперечные сечения токоведущих проводов для формирования однородного распределения частиц на поверхности связывания сенсорного устройства в соответствии с вариантами осуществления настоящего изобретения.
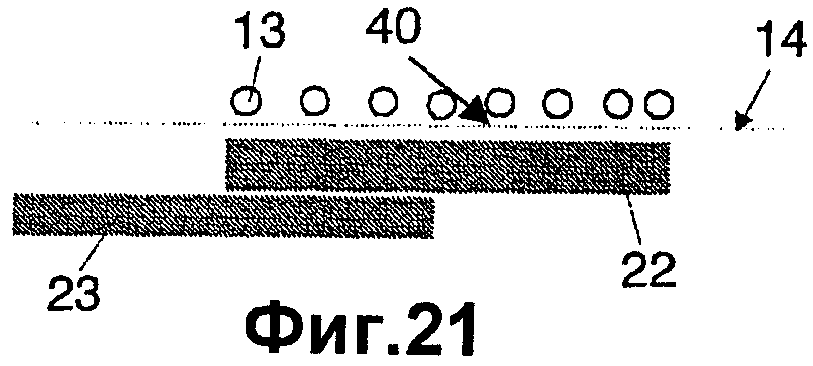
Фиг.21 - поперечное сечение конфигурации датчика в соответствии с вариантом осуществления изобретения.
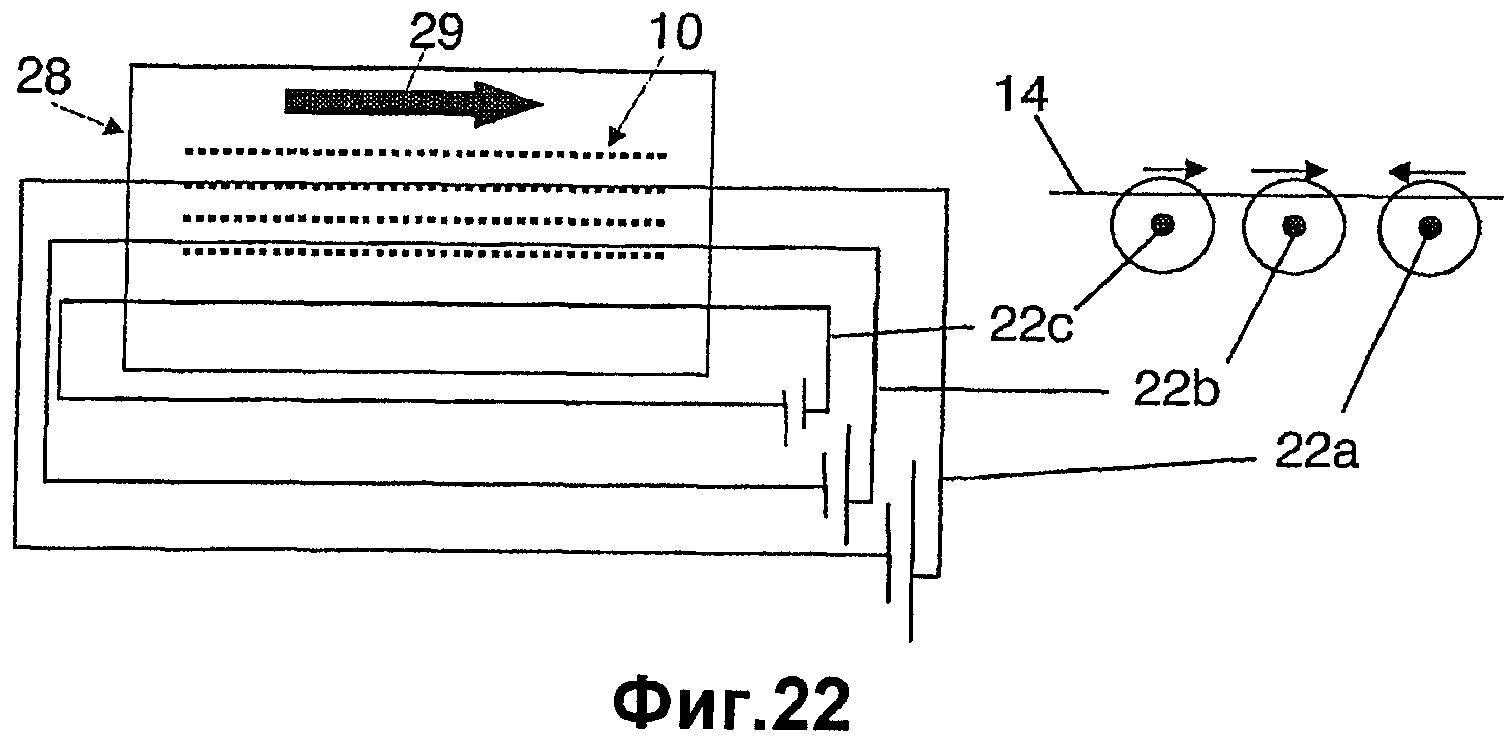
Фиг.22 - изображение плоскостного «магнитно-волнового активирования» столбцов из гранул с помощью упорядоченного множества токоведущих проводов, которые можно адресовать последовательно.
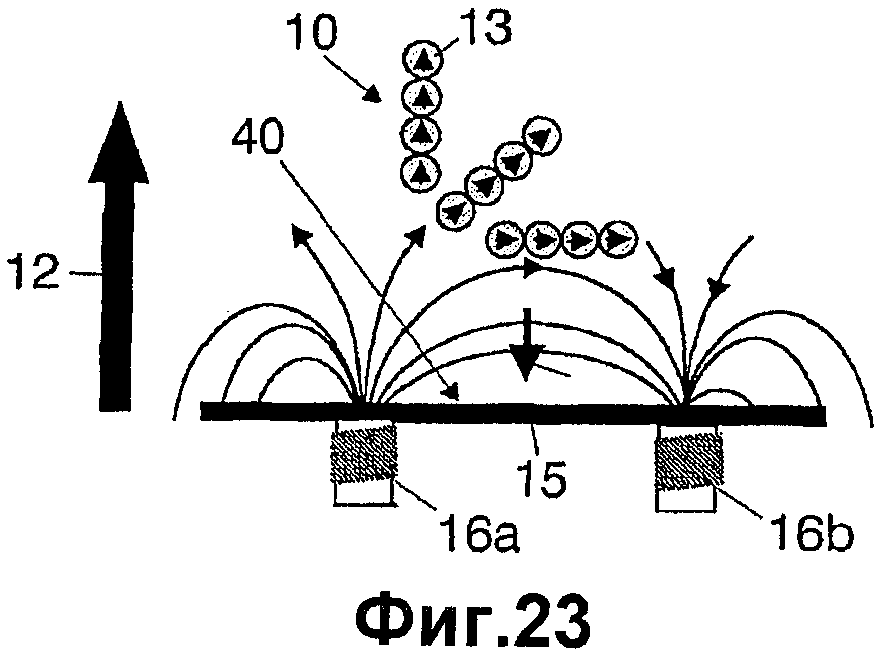
Фиг.23 - поперечное сечение конфигурации датчика в соответствии с вариантом осуществления изобретения.
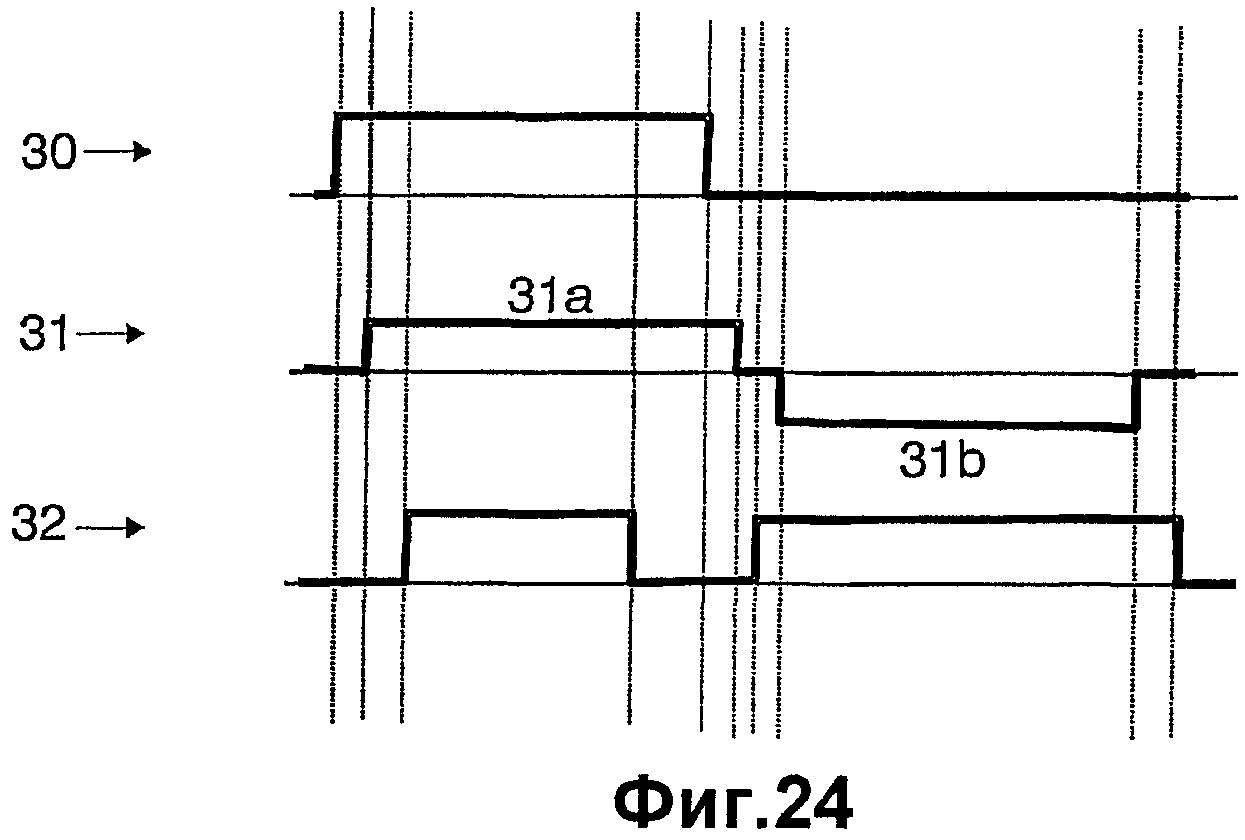
Фиг.24 - пример последовательностей возбуждения в виде функции времени в соответствии с вариантом осуществления изобретения.
Фиг.25 - пояснение образования петли или кольца из магнитных частиц.
Фиг.26 - вид по оси z, т.е. вдоль продольной оси цепочек из гранул в соответствии с вариантом осуществления изобретения.
Фиг.27 - вид сверху вдоль продольной оси цепочек из гранул на конфигурацию, содержащую два токопроводящих провода с магнитным чувствительным элементом в середине.
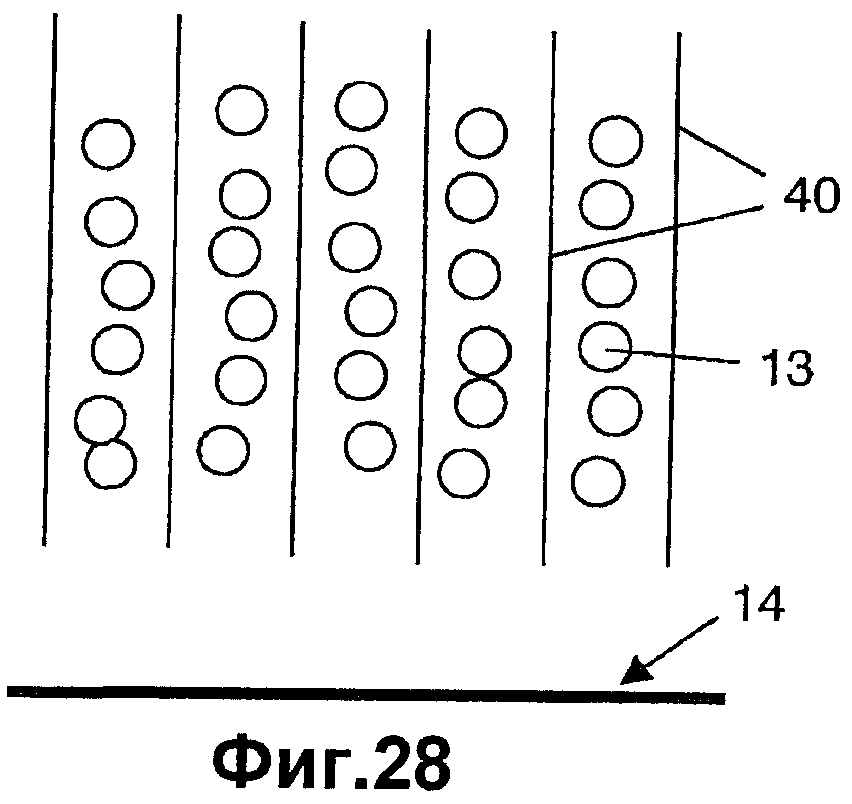
Фиг.28 - изображение сенсорного устройства с поверхностью связывания в виде пористой многоканальной структуры.
На разных чертежах одинаковые позиции обозначают одни и те же или аналогичные элементы.
Ниже настоящее изобретение описано со ссылками на конкретные варианты осуществления и со ссылками на некоторые чертежи, но ограничивается изобретение не данными вариантами, а только формулой изобретения. Ни одну из позиций в формуле изобретения нельзя истолковывать как ограничивающую объем изобретения. Чертежи в описании являются схематичными изображениями и не имеют ограничительного смысла. На чертежах размеры некоторых элементов могут быть преувеличены и показаны не в масштабе для наглядности. Термин «содержащий» в случае его использования и формуле изобретения не исключает других элементов или этапов. Указание на единственное число предмета охватывает множественное число данного предмета, если прямо не утверждается что-нибудь иное.
Кроме того, термины первый, второй, третий и т.п.в настоящем описании и формуле изобретения служат для различения между подобными элементами и не обязательно для отражения последовательного или хронологического порядка. Следует понимать, что используемые подобным образом термины являются взаимозаменяемыми в соответствующих обстоятельствах, и что варианты осуществления изобретения, представленные в настоящем описании, способны действовать в других последовательностях, кроме представленных или изображенных в настоящем описании.
Кроме того, термины верхний, нижний, над, под и т.п.в настоящем описании и формуле изобретения использованы только для наглядности и не обязательно для описания относительных положений. Следует понимать, что используемые подобным образом термины являются взаимозаменяемыми в соответствующих обстоятельствах и что варианты осуществления изобретения, представленные в настоящем описании, способны действовать при других ориентациях, кроме представленных или изображенных в настоящем описании.
Настоящее изобретение предлагает устройство и способ для измерения биоинформации. Преимущество настоящего изобретения может заключаться в ускорении процесса измерения биоинформации, осуществляемого при использовании сенсорного устройства, например, но без ограничения, магнитного сенсорного устройства. В ходе процессов измерения биоинформации с использованием магнитного сенсорного устройства магнитные частицы или гранулы непосредственно или косвенным путем прикрепляются к намеченным молекулам, например, белкам, антителам, нуклеиновым кислотам (например ДНК, РНК), пептидам, олиго- или полисахаридам или сахарам, небольшим молекулам, гормонам, лекарствам, метаболитам, клеткам или клеточным фракциям, тканевым фракциям. Упомянутые молекулы следует обнаруживать в жидкости, которая может быть исходной пробой или может быть уже обработана перед вставкой в биодатчик (например, разбавлена, выварена, расщеплена, биохимически модифицирована, отфильтрована, растворена в буферном растворе). Исходные жидкости могут быть, например, биологическими жидкостями, например, слюной, мокротой, кровью, плазмой крови, тканевой жидкостью или мочой, или другими жидкостями, например, жидкостями для питья, жидкости из окружающей среды или жидкость, которую получают предварительной обработкой пробы. Жидкость может, например, содержать элементы твердофазной пробы, например, от проб из биопсии, стула, пищи, окружающей среды.
Поверхность сенсорного устройства можно модифицировать закреплением на ней молекул, которые пригодны для связывания намеченных молекул, которые присутствуют в жидкости. Поверхность датчика можно также снабдить микроорганизмами (например, вирусами или клетками) или фракциями микроорганизмов (например, тканевыми фракциями, клеточными фракциями, мембранами). Поверхность биологического связывания может находиться в непосредственном контакте с микросхемой датчика, но возможно также наличие зазора между поверхностью связывания и микросхемой датчика. Например, поверхность связывания может быть представлена материалом, который отделен от микросхемы, например, пористым материалом. Этот материал может быть материалом, допускающим боковое растекание или сквозное протекание, например, содержащим микроканалы в кремнии, стекле, пластике и т.п. Поверхность связывания может быть параллельной поверхности микросхемы датчика. В альтернативном варианте поверхность связывания может находиться под углом, например, перпендикулярно относительно поверхности микросхемы датчика.
Перед тем как магнитные частицы или комбинация из магнитных частиц/намеченных молекул могут стать связанными с поверхностью сенсорного устройства, они должны быть притянуты к поверхности. Варианты осуществления настоящего изобретения предлагают способ ускорения измерения биоинформации путем ускорения, по меньшей мере, одного из этапов «притягивания» и/или «связывания» в протоколе анализа, описанном в разделе обзора уровня техники. В соответствии с вариантами осуществления изобретения этап притягивания можно ускорить магнитным активированием комбинаций из магнитных частиц/намеченных молекул. Процесс «связывания» можно оптимизировать повышением эффективности контакта (для максимального увеличения скорости специфического биологического связывания, когда гранула находится вблизи поверхности связывания), а также увеличения времени контакта (общего времени, в течение которого отдельные гранулы находятся в контакте с поверхностью связывания).
В соответствии с первым аспектом, не показанном в явном виде на чертежах, настоящее изобретение предлагает применение средства для изменения порядка и рандомизации расположения отдельных магнитных частиц относительно центров связывания на поверхности связывания, чтобы предоставить центрам связывания на всех отдельных магнитных частицах большую вероятность наличия времени контакта с центрами связывания на поверхности связывания и чтобы тем самым оптимизировать процесс связывания. Следует отметить, что магнитные частицы можно использовать в анализах различных типов, например, анализах связывания или разрыва связывания, сэндвич-анализе, анализе методом вытеснения, ингибиторном анализе или конкурентном анализе.
В дальнейшем основное внимание уделяется анализу связывания, в частности сэндвич-анализу, но описанные способы не ограничены анализом данного типа.
При анализе на биодатчике этапы «притягивания» и «связывания» требуется сделать насколько возможно более эффективными и быстрыми. На этапе «притягивания» гранулы из всего объема жидкости концентрируются в зоне вблизи поверхности связывания датчика. Время, необходимое для притягивания к поверхности связывания, должно быть как можно короче, меньше 30 минут, предпочтительно меньше 10 минут, и, более предпочтительно, меньше 1 минуты.
На этапе «связывания» образующаяся совокупность гранул приводится еще ближе к поверхности связывания для оптимизации наступления искомого (био)химического связывания с площадкой захвата или связывания на датчике, т.е. площадкой, на которой имеет место высокая чувствительность обнаружения датчиками, например магнитными датчиками, и высокая биологическая специфичность связывания. Задача оптимизации процесса «связывания» не тривиальна. Поэтому существует потребность в повышении эффективности контакта (для максимального повышения скорости специфического биологического связывания, когда гранула находится вблизи поверхности связывания), а также в увеличении времени контакта (общего времени, в течение которого отдельные гранулы находятся в контакте с поверхностью связывания).
Во-первых, сначала рассмотрена эффективность контакта. Эффективность контакта характеризует контакт между поверхностью гранул, которые являются самыми близкими к датчику, поверхностью области связывания на датчике. В идеальном случае расстояние между биологическими молекулами на поверхности гранул и биологическими молекулами на поверхности области связывания датчика должно быть порядка размера биологических молекул, например 0-100 нм.
Для одной гранулы, находящейся вблизи поверхности и под действием градиента магнитного поля, расстояние приближения ξ можно оценить сравнением тепловых флуктуаций с магнитной силой:

Следовательно, необходимо создавать градиент ∇B магнитного поля, чтобы притягивать частицы или гранулы к поверхности связывания. Чем больше градиент ∇B магнитного поля и, следовательно, чем больше сила F, действующая на гранулы, тем меньше расстояние приближения ξ. Градиенты ∇B магнитного поля можно создавать разными способами. Например, внешним средством (например, внешним магнитом или катушкой индуктивности). Внешняя катушка индуктивности может создавать, например, градиент магнитного поля 25 Тл/м. Градиенты магнитного поля можно также создавать, по меньшей мере, одним внутренним микросхемным токоведущим проводом. В таком случае градиент можно оценить по формуле:

где I означает ток в токоведущем проводе, и r означает расстояние между магнитной гранулой и токоведущим проводом. Например, ток 10 мA на расстоянии 0,5 мкм от гранулы может создать градиент поля 8,103 Тл/м на уровне гранулы.
В другом примере рассчитывается величина градиента магнитного поля вблизи магнитного материала, включенного в поверхность датчика. Взять пример, в котором магнитные гранулы включены в материал. Величина градиента магнитного поля на расстоянии r от центра сферической гранулы с моментом m приближенно дается уравнением:

Для простоты в уравнении (8) не учитывается угловая зависимость градиента, которая может дать различие в два раза. Например, 300-нм гранула с магнитным моментом m=10-16 А·м2 может создать градиент около 2,103 Тл/м на расстоянии 400 нм.
Например, допустим, что поле имеет градиент 103 Тл/м. Из уравнения (6) можно вычислить, что при магнитном моменте m, создаваемым структурой из одной гранулы (или структурой из нескольких гранул, как во втором аспекте настоящего изобретения), 10-15 А·м2 или более, можно обеспечить расстояние приближения или притягивания ξ, равное 4 нм (если m=10-15 А·м2) или меньше (если m больше 10-15 А·м2) при комнатной температуре. Это означает, что, в принципе, очень короткие расстояния можно обеспечить с использованием уже применяемых на практике градиентов магнитных полей, например, в диапазоне от 10 Тл/м до 10000 Тл/м, так что возможно эффективное биологическое связывание.
Во-вторых, далее рассматривается время контакта. Когда большое число гранул или частиц притягивается к поверхности связывания сенсорного устройства и вся поверхность связывания становится покрытой магнитными частицами, то сформированная таким образом магнитная структура будет очень плотной, а также неподвижной и жесткой. Из-за ограничений переноса большая часть частиц не сможет достигнуть поверхности связывания и не будет иметь возможности образования искомой специфической биохимической связи. Это приводит к ослаблению сигнала в биодатчике и, тем самым, ложному показанию или чрезмерно продолжительному времени анализа.
Авторы настоящего изобретения пришли к пониманию, что отдельные гранулы обладают свободой поворота. Например, суперпарамагнитные гранулы характеризуются очень слабой магнитной анизотропией, поэтому имеет место очень слабая связь между магнитным моментом и физической ориентацией частицы. Тепловая энергия вызывает поворот магнитных гранул (вращательную диффузию), и, в результате, гранулы подставляют значительную часть площади своей поверхности для воздействия со стороны поверхности связывания. Воздействие одной поверхности на другую обеспечит возможность образования специфических биохимических связей.
В соответствии с настоящим изобретением магнитные частицы можно рандомизировать периодически или непериодически, например, снятием и повторным приложением магнитных полей, притягивающих отдельные магнитные частицы к поверхности связывания сенсорного устройства или возбуждением поворота гранул, или созданием движения жидкости, например, перемешиванием или акустическими вибрациями. Под рандомизацией понимается, что магнитные частицы, которые притянуты к поверхности связывания, но которые не связаны с поверхностью связывания, немного отодвигаются от поверхности связывания, но никогда не отводятся очень далеко от поверхности связывания, т.е. они остаются на малом расстоянии от поверхности связывания в направлении по оси z, т.е. в направлении, перпендикулярном поверхности связывания. В предпочтительном варианте магнитные частицы остаются на расстоянии не дальше, чем 100 мкм от поверхности связывания и, в более предпочтительном варианте, остаются не дальше, чем 10 мкм от поверхности связывания в направлении, по существу, перпендикулярном поверхности связывания. В соответствии с изобретением частицы отодвигаются от поверхности связывания так, что 90% магнитных частиц, которые притянуты к поверхности связывания, остается в пределах, самое большее, 10% от объема пробы. Частицы не диспергируют обратно в весь объем пробы. Многократное повторение притягивания и рандомизации гарантирует, что биологический материал, связанный с магнитными гранулами, располагает высокой вероятностью, по меньшей мере, однократного пребывания в контакте с центрами связывания на поверхности связывания сенсорного устройства во время общего анализа, т.е. что все объекты анализа располагают высокой вероятностью получения времени контакта с центрами связывания на поверхности связывания сенсорного устройства.
Таким образом, магнитные частицы или гранулы притягиваются к поверхности и на поверхность связывания с помощью градиента магнитного поля.
Анализ должен быть разработан с возможностью достижения максимально специфического связывания (притягиванием гранул к поверхности связывания), минимума помех связыванию (все гранулы должны располагать высокой вероятностью взаимодействия с центрами связывания на поверхности связывания сенсорного устройства) и минимума нежелательных разрывов связей (под действием сил, разрывающих необходимые связи между гранулами и поверхностью связывания).
Как пояснялось, поворот магнитных частиц можно использовать для оптимизации степени воздействия и скорости связывания в ходе биохимического анализа. Поворот может вызываться тепловой энергией, но может также вызываться или усиливаться приложением переменных во времени полей. Во-первых, когда в растворе присутствуют магнитные частицы, поворот данных магнитных частиц может усилить взаимодействие и увеличить скорость связывания между биологическим материалом в растворе и поверхностью магнитных частиц. Это применимо, например, к этапу извлечения или захвата в ходе анализа, на котором магнитные частицы служат для связывания со специфическим биологическим материалом в растворе пробы и/или извлечения упомянутого материала. Во-вторых, когда магнитные частицы поворачиваются относительно другого тела, например поверхности биочипа или поверхности клетки, возможно усиление взаимодействия и увеличение скорости связывания между меткой и другим телом. Увеличение скорости связывания может иметь значение, в частности, когда площадь поверхности метки велика относительно размера соответствующей области связывания молекулы на магнитной частице. Это соответствует, например, случаю анализов при низких концентрациях, когда этап захвата или извлечения дает магнитные частицы только с очень небольшим количеством интересующего биологического материала на поверхности магнитной частицы. Для справки, некоторые вычисления, касающиеся влияния ориентации и поворота на биохимическую кинетику, можно найти в работе «K.S.Schmitz and J.M.Schurr: «The role of orientation constraints and rotation diffusion in biomolecular solution kinetics», J. Phys. Chem., vol. 76, p.534 (1972)».
Идеальная скорость поворота дается оптимальной скоростью связывания при допустимой скорости разрыва связей для биохимической связи, создание которой требуется за данное время анализа. Иными словами, поворот оптимизируют в отношении чувствительности, а также специфичности. Во избежание обрыва искомых специфических связей прилагаемые силы должны быть меньше 1 нН.
Кроме того, в соответствии со вторым аспектом настоящего изобретения предлагается использование многочастичных магнитных структур, например, но без ограничения перечисленным, цепочек или столбиков магнитных частиц или гранул, например, для обеспечения повышенного быстродействия при измерении биоинформации. В частности, в соответствии с изобретением многочастичные структуры применяются для повышения скорости этапов «притягивания» и/или «связывания» процесса в протоколе измерения биоинформации. Следует отметить, что магнитные частицы можно использовать в разнотипных анализах, например, анализе связывания или разрыва связывания, сэндвич-анализе, анализе методом вытеснения, ингибиторном анализе или конкурентном анализе. В дальнейшем основное внимание уделяется анализу связывания, в частности сэндвич-анализу, но описанные способы не ограничены анализом данного типа.
Преимущество использования многочастичных структур состоит в том, что отдельные частицы внутри структур обладают более сильным магнитным моментом вследствие ослабления размагничивающих полей. Кроме того, суммарные магнитные моменты таких структур и, следовательно, также магнитные силы больше, чем в случае отдельных частиц. Сила, которая может быть приложена к магнитной многочастичной структуре, дается уравнением (1):

где m означает магнитный момент многочастичной структуры, B означает приложенное магнитное поле, и ∇B означает градиент приложенного магнитного поля. На цепочку, например, из 100 частиц может действовать приблизительно в 100 раз большая сила, чем на одну частицу или гранулу вследствие более сильного общего магнитного момента m многочастичной структуры. Многочастичные структуры в соответствии со вторым аспектом настоящего изобретения могут содержать комбинацию больших и малых частиц, но могут быть также структурами, содержащими частицы аналогичного размера. Обычно многочастичные структуры могут содержать от 5 до нескольких 1000 магнитных частиц или гранул, но возможны также даже большие количества.
В дальнейшем описание второго аспекта изобретения изложено на примере цепочек или столбиков магнитных частиц. Однако следует понимать, что такое описание дано исключительно для удобства пояснения, и что изобретение этим не ограничивается. Возможно также использование других многочастичных структур в соответствии со вторым аспектом изобретения, например, кластеров магнитных частиц или одиночных или составных петель, или колец из магнитных частиц.
Таким образом, одним из примеров многочастичной структуры, которую можно использовать в соответствии со вторым аспектом настоящего изобретения, является цепочка 10 из магнитных частиц или гранул. Известно, что магнитные частицы или гранулы образуют цепочки 10, когда магнитные силы, действующие между гранулами, преобладают над тепловым движением. Намагничивание магнитных частиц или гранул в магнитном поле вызывает, в результате, дипольное взаимодействие между соседними гранулами, которое, если энергия взаимодействия превышает тепловую энергию частиц, приводит к образованию цепочек 10 из магнитных частиц в направлении линий магнитного поля. С течением времени цепочки 10 взаимодействуют между собой с образованием столбцов. Например, в однородном магнитном поле без градиентов поля цепочки и столбики могут располагаться в виде регулярных структур вследствие отталкивания, вызываемого дипольными моментами. Данное явление отражено на фиг.2, на котором показано взаимодействие магнитных гранул и образование цепочек 10 в присутствии однородного магнитного поля в квадратной 50-мкм капиллярной трубке 11 (audry et al., J. Phys. Cond. Matt. 16, R469 (2004)).
Многочастичные структуры, которые образуются, определяются картиной силовых линий прилагаемого магнитного поля, продолжительностью приложения магнитного поля, частотой модуляции, типами гранул, которые применяются (например, зависимостью от размера, магнитной восприимчивостью, магнитной анизотропией, формой, суперпарамагнитными или ферромагнитными свойствами гранул), и концентрацией гранул. Например, что касается картины силовых линий магнитного поля, то возможно образование искривленных цепочек при приложении имеющих кривизну полей. Для образования кластеров частиц можно использовать, например, петлеобразный провод. Частицы будут притягиваться к области максимального поля в центре петли провода. Для получения петель или колец 8 из частиц можно применить токоведущий провод 9 с сегментом, к которому имеется свободный доступ со всех сторон. Это показано на фиг.25. Силовые линии поля будут следовать за краем токоведущего провода 9, и частицы будут располагаться с образованием кольца или петли 8. Частицы, обладающие большой продолжительностью релаксации или гистерезисом, будут сохранять петлеобразную фигуру, когда магнитное поле снимается. Кроме того, магнитные частицы, первоначально организованные в цепочки, могут образовывать петли или кольца, когда магнитное поле снимается.
В дальнейшем описание второго аспекта настоящего изобретения дополнительно изложено на примере цепочек 10 из гранул. Подобное описание обусловлено только удобством объяснения и не ограничивает изобретение. В дальнейшем поясняется образование цепочек 10 из частиц. Отношение λ энергии взаимодействия двух параллельных диполей, находящихся в контакте, к тепловой энергии дается уравнением:

где U означает энергию взаимодействия между магнитными гранулами, k означает постоянную Больцмана, равную 1,38054·10-23 Дж/К, и T означает температуру в градусах Кельвина. Энергию U взаимодействия можно также описать уравнением:

где μ0 означает магнитную проницаемость вакуума (4π·10-7 Гн/м), m1 и m2 означают магнитные моменты соответственно первой и второй магнитных частиц или гранул, r означает расстояние между центрами магнитных частиц или гранул, и

где r означает расстояние между центрами частиц и поэтому равняется диаметру частицы, если частицы находятся в непосредственном контакте. В случае магнитных гранул диаметром 300 нм, выпускаемых компанией Ademtech, с магнитным моментом m, равным 1,5×10-15 А·м2 в поле возбуждения 0,1 Тл, λ может иметь значение около 4×103. Столь большое отношение энергии взаимодействия двух параллельных диполей, находящихся в контакте, к тепловой энергии предполагает, что сила магнитного взаимодействия намного больше, чем тепловое воздействие на магнитные частицы или гранулы, что приводит к образованию цепочек 10 из магнитных частиц. Когда отношение λ уменьшается, степень подвижности гранул в цепочке 10 возрастает, и цепочки 10 проявляют флуктуации формы. Цепочки 10 разъединяются, когда отношение становится меньше единицы.
Силу взаимодействия или притяжения Fint между магнитными частицами или гранулами в положении взаимного притягивания (в отличие от положения, когда одноименные полюса соприкасаются) можно выразить следующим выражением:

где Fint выражается в Н.
В предпочтительном варианте, в соответствии со вторым аспектом настоящего изобретения, можно использовать суперпарамагнитные частицы или гранулы. Суперпарамагнитные частицы или гранулы являются ферромагнитными гранулами, настолько малыми, что они быстро теряют свой магнитный момент в отсутствие внешнего магнитного поля. Суперпарамагнитные частицы или гранулы легко намагничиваются до больших магнитных моментов, что облегчает обнаружение, но, при этом, еще можно выключать взаимное магнитное притяжение для предотвращения необратимого скопления. В общем, суперпарамагнитные частицы или гранулы с диаметром, например, около 300 нм могут потребовать поля с индукцией всего 4-10 мТл для образования цепочек 10 гранул. Скорость образования цепочек и длина цепочек могут зависеть от концентрации частиц или гранул и магнитного момента частицы или гранулы [Zhang, Phys. Rev. E51, 2099 (1995)]. Например, цепочки 10 в соответствии с вариантами осуществления настоящего изобретения могут быть составлены в длину из приблизительно 100 частиц.
Поверхность магнитных частиц или гранул может быть подготовлена так, что обеспечивать возможность обратимого скопления, т.е. образования многочастичных структур в присутствии магнитного поля, и разъединения многочастичных структур, когда магнитные поля, по существу, снимаются. Эксперименты показали, что обратимое образование цепочек возможно для, например, 300-нм частиц, выпускаемых компанией Ademtech. Поверхность гранул можно подготовить так, чтобы исключить слипание и обеспечить обратимость образования цепочек. Этого можно добиться, например, нанесением полимерного слоя для энтропийного отталкивания, стерическим препятствием и/или нанесением электрических зарядов на поверхность. При очень сильных полях из-за слишком сильного сближения может иметь место некоторое необратимое связывание и приводить к неспецифической адгезии. В этом случае следует ослаблять прилагаемые поля.
Как уже сказано, в ходе анализа на биодатчике этапы «притягивания» и «связывания» должны выполняться как можно эффективнее и быстрее. На этапе «притягивания» гранулы из объема жидкости концентрируются в зоне вблизи поверхности связывания датчика. Время, необходимое для притягивания частиц к поверхности связывания, должно быть как можно короче, меньше 30 минут, предпочтительно меньше 10 минут и, еще предпочтительнее, меньше 1 минуты.
На этапе «связывания» образующаяся совокупность гранул приводится еще ближе к поверхности связывания для оптимизации наступления искомого (био)химического связывания с площадкой захвата или связывания на датчике, т.е. площадкой, на которой имеет место высокая чувствительность обнаружения датчиками, например магнитными датчиками, и высокая биологическая специфичность связывания. Задача оптимизации процесса «связывания» не тривиальна. Поэтому существует потребность в повышении эффективности контакта (для максимального повышения скорости специфического биологического связывания, когда гранула находится вблизи к поверхности связывания), а также в увеличении времени контакта (общего времени, в течение которого отдельные гранулы находятся в контакте с поверхностью связывания).
Вопросы эффективности контакта и времени контакта изложены выше в связи с первым аспектом настоящего изобретения.
Что касается времени контакта, когда к поверхности связывания сенсорного устройства притянуто большое число гранул или частиц и вся поверхность связывания становится покрытой магнитными частицами, то магнитная структура будет очень плотной, а также неподвижной и жесткой. Из-за ограничений переноса большая часть частиц не сможет достигнуть поверхности связывания и не будет иметь возможности образования искомой специфической биохимической связи. Это приводит к ослаблению сигнала в биодатчике и, тем самым, ложному показанию или чрезмерно продолжительному времени анализа.
Представленный выше анализ приводит к выводу, что многогрануловые структуры создают контакт по большой площади с поверхностью связывания, но не допускают их полезного использования в магнитных биодатчиках из-за невысоких трансляционных динамических характеристик внутри многогрануловой структуры. Однако авторы настоящего изобретения нашли, что существует способ решения данной проблемы. В связи с этим требуется понять, что внутри многогрануловых структур отдельные гранулы сохраняют свободу поворота. Например, суперпарамагнитные гранулы обладают очень слабой магнитной анизотропией, поэтому связь между магнитным моментом и физической ориентацией частицы является очень слабой. Тепловая энергия вызывает поворот магнитных гранул (вращательную диффузию), и, в результате, гранулы будут подставлять значительную часть площади своей поверхности воздействию поверхности связывания. Воздействие одной поверхности на другую обеспечит возможность образования специфических биохимических связей.
Другими словами, многогрануловые структуры можно использовать в биодатчиках при условии, что, в соответствии с настоящим изобретением, структуры периодически или непериодически рандомизируются, например, снятием и повторным приложением магнитных полей, притягивающих многочастичные структуры к поверхности связывания сенсорного устройства, или возбуждением поворота гранул и структур из гранул, или созданием движения жидкости, например, перемешиванием или акустическими вибрациями. Под рандомизацией понимается, что магнитные частицы, которые притянуты к поверхности связывания, но которые не связаны с поверхностью связывания, немного отодвигаются от поверхности связывания, но никогда не отводятся очень далеко от поверхности связывания, т.е. они остаются на малом расстоянии от поверхности связывания в направлении по оси z, т.е. в направлении, перпендикулярном поверхности связывания. В предпочтительном варианте магнитные частицы остаются не дальше чем 100 мкм от поверхности связывания и, в более предпочтительном варианте, остаются не дальше, чем 10 мкм от поверхности связывания в направлении, по существу, перпендикулярном поверхности связывания. В соответствии с изобретением частицы отодвигаются от поверхности связывания так, что 90% магнитных частиц, которые входят в состав многочастичной структуры, остается в пределах, самое большее, 10% от объема пробы. Частицы не диспергируют обратно в весь объем пробы. Многократное повторение притягивания и рандомизации гарантирует, что биологический материал, связанный с магнитными гранулами, располагает высокой вероятностью, по меньшей мере, однократного пребывания в контакте с центрами связывания на поверхности связывания сенсорного устройства во время общего анализа, т.е. что все объекты анализа располагают высокой вероятностью получения времени контакта с центрами связывания на поверхности связывания сенсорного устройства.
Таким образом, магнитные частицы или гранулы притягиваются к поверхности и на поверхность связывания с помощью градиента магнитного поля. Гранулы, участвующие в процессе связывания, будут входить в состав многогрануловых структур, отличающихся тем, что гранулы характеризуются более чем 80% вероятностью присутствия поверхности, по меньшей мере, одной другой гранулы в их окрестности, т.е. на расстоянии между поверхностями гранул не более двукратного диаметра гранулы.
В заключение, анализ должен быть разработан с возможностью достижения максимально специфического связывания (притягиванием гранул к поверхности связывания), минимума помех связыванию (все гранулы должны располагать высокой вероятностью взаимодействия с центрами связывания на поверхности связывания сенсорного устройства) и минимума нежелательных разрывов связей (под действием сил, разрывающих необходимые связи между гранулами и поверхностью связывания).
Как пояснялось, поворот магнитных частиц и многогрануловых структур можно использовать для оптимизации степени воздействия и скорости связывания в ходе биохимического анализа. Поворот может вызываться тепловой энергией, но может также вызываться или усиливаться приложением переменных во времени полей. Во-первых, когда в растворе присутствуют магнитные частицы, поворот данных магнитных частиц может усилить взаимодействие и увеличить скорость связывания между биологическим материалом в растворе и поверхностью магнитных частиц. Это применимо, например, к этапу извлечения или захвата в ходе анализа, на котором магнитные частицы служат для связывания со специфическим биологическим материалом в растворе пробы и/или извлечения упомянутого материала. Во-вторых, когда магнитные частицы поворачиваются относительно другого тела, например поверхности биочипа или поверхности клетки, возможно усиление взаимодействия и увеличение скорости связывания между меткой и другим телом. Увеличение скорости связывания может иметь значение, в частности, когда площадь поверхности метки велика относительно размера соответствующей области связывания молекулы на магнитной частице. Это соответствует, например, случаю анализов при низких концентрациях, когда этап захвата или извлечения дает магнитные частицы только с очень небольшим количеством интересующего биологического материала на поверхности магнитной частицы. Для справки, некоторые вычисления, касающиеся влияния ориентации и поворота на биохимическую кинетику, можно найти в работе «K.S. Schmitz and J. M. Schurr: «The role of orientation constraints and rotation diffusion in biomolecular solution kinetics», J. Phys. Chem., vol. 76, p.534 (1972)».
Идеальная скорость поворота дается оптимальной скоростью связывания при допустимой скорости разрыва связей для биохимической связи, создание которой требуется за данное время анализа. Иными словами, поворот оптимизируют в отношении чувствительности, а также специфичности. Во избежание обрыва искомых специфических связей, прилагаемые силы должны быть меньше 1 нН.
В соответствии с первым вариантом осуществления второго аспекта настоящего изобретения описано применение магнитных полей, которые ориентированы, по существу, перпендикулярно поверхности 14 датчика сенсорного устройства 15, т.е. в соответствии с ориентирующими степенями подвижности, показанными на чертежах, ориентированы в направлении по оси z. Это показано на фиг.3. Однородное магнитное поле, обозначенное стрелкой 12, вызывает образование цепочек 10 из частиц или гранул, содержащих множество магнитных частиц или гранул 13, как пояснялось ранее. Затем может быть создан градиент магнитного поля для притягивания цепочек 10 из магнитных частиц или к поверхности 14 сенсорного устройства 15. Градиент магнитного поля можно обеспечить, по меньшей мере, одним средством 16 для создания градиента магнитного поля. В примере, показанном на фиг.3, градиент магнитного поля создается с помощью внешней катушки 16 индуктивности, которая расположена под сенсорным устройством 15 и которая применяется для создания сил, направленных к и от поверхности 14 датчика. В вариантах осуществления настоящего изобретения сенсорное устройство 15, которое можно применить в соответствии с настоящим изобретением, может содержать, по меньшей мере, один магнитный чувствительный элемент и, по меньшей мере, одно средство создания магнитного поля для создания магнитного поля с целью образования цепочек 10 гранул. В предпочтительном варианте магнитный чувствительный элемент может представлять собой магниторезистивный чувствительный элемент, например, GMR (супермагниторезистивный), TMR (туннельный магниторезистивный) или AMR (анизотропный магниторезистивный) чувствительный элемент. Биомолекулярные диагностические средства обычно включают в себя систему считывания, пригодную для многократного использования, и одноразовый блок, в который вводят пробу. Катушки индуктивности для возбуждения поля могут входить в состав устройства считывания или одноразового блока. В одноразовом блоке катушка индуктивности может быть встроена в наружный материал (обычно, пластик) или может быть встроена в микросхему, которая выполняет также обнаружение магнитного поля гранул. В соответствии с альтернативными вариантами осуществления сенсорное устройство 15 может содержать, по меньшей мере, один немагнитный чувствительный элемент, например оптический чувствительный элемент.
Цепочки гранул, ориентированные в направлении по оси z, можно легко концентрировать в небольшой области вблизи датчика или даже на нем приложением слабого градиентного магнитного поля в дополнение к более однородному полю большей величины. Это схематически показано на фиг.26, где представлен вид по оси z, т.е. вдоль продольной оси цепочек 10 гранул, которые изображены незаштрихованными кружками.
Поле, ориентированное по оси z, образует цепочки 10 гранул. Локальный токопроводящий провод создает градиент поля в середине контура 30. Когда поле, созданное контуром 30, имеет такую же ориентацию, как внешнее поле, то поле внутри контура 30 сильнее, чем снаружи контура. Поэтому цепочки 10 притягиваются в середину контура 30. Когда направление тока изменяют на обратное, поле, созданное контуром 30, будет противоположным внешнему полю в середине контура 30 и, вследствие этого, цепочки 10 будут выталкиваться из контура 30. Аналогично, на фиг.27, где представлен вид сверху вдоль продольной оси цепочек 10 гранул на конфигурацию, содержащую два токоведущих провода с датчиком в середине, показано, как токи в токоведущих проводах могут служить для концентрации цепочек 10 гранул к области связывания датчика.
Следует отметить, что присутствие магнитного датчика или других магнитных материалов в микросхеме может влиять на поля вблизи датчика из-за магнитостатических или магнитопроводных свойств. Преимущество неплоской ориентации цепочек состоит в том, что канализация магнитного потока оказывается слабой благодаря плоскостной анизотропии форм тонких магнитных пленок. Градиент магнитного поля можно модулировать синфазно с модулированием магнитного поля 12, образующего цепочки, что ведет к притягиванию цепочек 10 гранул к поверхности 14 датчика. Когда модуляция осуществляется в противофазе, градиент поля обращается, и, в результате, цепочки 10 гранул могут отталкиваться от поверхности 14 датчика. Это показано на фиг.4, где изображен эффект отталкивания (позиция 17) и притягивания (позиция 18) магнитной частицы или цепочки 10 гранул соответственно от и к поверхности 14 сенсорного устройства 15. Отталкивание цепочек 10 гранул может обеспечить специфичность, которая позволит различать (прочно) связанные и слабо связанные гранулы или частицы 13 на поверхности 14 датчика.
Сопротивление потоку цепочек 10 гранул меньше для цепочек 10, двигающихся вдоль их продольной оси, чем для цепочек 10, двигающихся перпендикулярно их продольной оси. При этом форма контейнера с жидкой пробой и получаемое, в результате, требуемое направление движения к датчику могут повлиять на выбор прилагаемых полей.
Как описано выше, магнитное поле для образования многочастичных магнитных структур, в представленном примере цепочек 10, прилагается в направлении, по существу, перпендикулярном поверхности 14 датчика, т.е. в направлении по оси z. Из-за приложения таких полей перпендикулярно поверхности 14 датчика, цепочки 10 из частиц или гранул ориентируются в направлении, по существу, перпендикулярном поверхности 14 датчика, как показано на фиг.3.
В случае если поверхность 40 связывания параллельна поверхности 14 датчика, расположена на или вблизи поверхности 14 датчика, вышеописанный вариант осуществления обладает недостатком, состоящим в том, что не все магнитные частицы 13 могут очень близко подойти поверхности 40 связывания из-за расположения продольных осей многочастичных структур 10 в плоскости, перпендикулярной плоскости поверхности 40 связывания. Однако в случае, если поверхность 40 связывания является пористой средой со стенками, по существу, перпендикулярными поверхности 14 датчика, гранулы 13 в многочастичной структуре 10, которые находятся в плоскости, по существу, параллельной поверхности 40 связывания, могут хорошо контактировать с поверхностью 40 связывания. Это показано на фиг.28, где поверхность 40 связывания обеспечена на стенках пористой многоканальной структуры, стенки которой ориентированы перпендикулярно относительно поверхности 14 датчика. Каналы в многоканальной структуре могут представлять собой, например, трубки или пазы. Многочастичные структуры 10 могут притягиваться к поверхности 40 связывания, например, при посредстве магнитного градиента в направлении, перпендикулярном поверхности 40 связывания, в показанном варианте осуществления, параллельном поверхности 14 датчика. После этапа «притягивания» совершается этап «связывания», т.е. центры связывания на частицах 13 в многочастичных структурах 10 приходят в контакт и связываются с центрами связывания на поверхности 40 связывания. В соответствии с настоящим изобретением положение отдельных магнитных частиц 13 в многочастичных структурах 10 рандомизируется относительно центров связывания на поверхности 40 связывания, чтобы предоставить центрам связывания на всех отдельных магнитных частицах 13 в многочастичных структурах 10 большую вероятность наличия времени контакта с центрами связывания на поверхности 40 связывания. Такая рандомизация может выполняться изменением градиента магнитного поля в направлении, перпендикулярном поверхности 40 связывания. После этапа связывания многочастичные структуры 10 больше не притягиваются к поверхности 40 связывания, несвязанные частицы 13 смываются, и может происходить обнаружение частиц, связанных на поверхности 40 связывания. Такое обнаружение может быть, например, магнитным обнаружением или оптическим обнаружением. Обычно в биологических тестах концентрация гранул ограничена настолько, что часто нельзя ожидать множества связанных гранул в одном канале и поэтому присутствие гранулы в микроканале можно обнаруживать оптическим способом. Если ожидается более высокая концентрация, период измерения можно разделить на множество интервалов времени. Высокую концентрацию объектов анализа можно обнаружить очень быстро (например, после одного интервала времени, например, через несколько секунд), тогда как низкие концентрации объектов анализа можно обнаруживать через намного большее время обработки (через множество интервалов времени, например, от минут до часов). В альтернативном варианте, если множество гранул, присутствующих в одном микроканале, должны обнаруживаться оптически, то метки можно сделать флуоресцентными. Если свет попадает в микроканалы, то все гранулы получат свет, и будет излучаться свет флуоресценции, так что можно обнаруживать присутствие всех гранул в микроканале.
Когда поверхность 40 связывания, по существу, параллельна поверхности 14 датчика, в частности поверхность 40 связывания являются частью поверхности 14 датчика, то, чтобы обеспечить небольшое расстояние между большинством частиц или гранул 13 в цепочке 10 и поверхностью 40 связывания целесообразно выстроить цепочки 10 гранул вдоль поверхности 40 связывания, т.е. прилагать магнитные поля с мощными компонентами в плоскости, т.е. в направлении по оси x или y. Это описано во втором варианте осуществления настоящего изобретения. Магнитные поля с мощными компонентами в плоскости можно прилагать внемикросхемным, а также внутренним микросхемным средством создания поля. Создание поля внутри микросхемы дает значительное преимущество в том, что четко определяется неизбежная магнитная перекрестная помеха, действующая на магнитный чувствительный элемент, например GMR-датчик.
Следовательно, в соответствии со вторым аспектом настоящего изобретения средство создания магнитного поля выполнено с возможностью формирования многочастичных магнитных структур 10, которые имеют продольную ось, расположенную параллельно поверхности 40 связывания.
Магнитное поле с мощной компонентой в плоскости, параллельной поверхности 40 связывания сенсорного устройства 15 прилагают, например, посредством установки устройства вблизи постоянного магнита и/или катушки индуктивности. Многочастичные магнитные структуры, в приведенном примере цепочки 10, формируются и притягиваются к поверхности 40 связывания. В соответствии с настоящим вторым вариантом осуществления, предпочтительно, по меньшей мере, один токоведущий провод 19 может быть расположен вблизи поверхности 40 связывания сенсорного устройства 15 и под ней, предпочтительно, не дальше, чем 1 мм, более предпочтительно, не дальше, чем 30 микрометров и, в наиболее предпочтительном варианте, не дальше, чем 3 микрометра. Затем образованные цепочки 10 из частиц или гранул ориентируются, по существу, параллельно поверхности 14 сенсорного устройства, в направлении, по существу, перпендикулярном направлению тока в, по меньшей мере, одном токоведущем проводе 19, и будут подтягиваться к поверхности 40 связывания, как схематично показано на фиг.5. На данной фигуре направление тока в токоведущем проводе 19 указано стрелкой 20, и ориентация цепочек 10 из частиц или гранул указана стрелкой 21.
Следует отметить, что, может быть, полезно сначала концентрировать гранулы 13 вблизи датчика с помощью полей, по существу, перпендикулярных поверхности 14 датчика, и затем переключаться на, по существу, плоскостные поля для повышения эффективности контакта между многочастичными структурами 10 и поверхностью 40 связывания. Данный процесс можно повторять несколько раз, чтобы сочетать (i) эффективную концентрацию гранул или частиц 13 вблизи поверхности 40 связывания, (ii) эффективный контакт между гранулами 13 и поверхностью 40 связывания и (iii) периодическую перестройку и рандомизацию гранул 13, чтобы предоставить всем гранулам 13 большую вероятность взаимодействия с центрами связывания на поверхности 40 связывания. Переключение между притягиванием частиц к поверхности 40 связывания и рандомизацией можно регулировать при посредстве устройства считывания, или такое переключение можно реализовать на микросхеме, которая может входить в состав сенсорного устройства 15 или которая может быть отдельной микросхемой для обработки сигналов в сенсорном устройстве 15.
Локальные токоведущие провода пригодны для создания градиентов поля (в единицах Тл/м) при относительно малых токах, например, меньших чем 100 мА. Слабые поля целесообразно использовать для минимизирования полей и, особенно, плоскостных полей, прилагаемых к датчику, в частности, в случае, когда датчик является магнитным датчиком. Приложение сильных полей может изменить чувствительность датчика, в частности чувствительность магнитного датчика, и вызвать изменения его магнитной структуры, например, изменения стенок доменов, магнитных петель, гистерезиса.
Кроме того, может быть, полезно создавать упомянутые поля на микросхеме датчика, чтобы упомянутые поля четко определялись, что исключает жесткие механические допуски в кассетном и считывающем устройстве.
В отсутствие другого средства создания поля токоведущий провод 19 с прямоугольным сечением, как в случае, представленном в примере на фиг.5, может создавать самые сильные поля и самые большие градиенты полей на его краях. Это означает, что частицы или гранулы 13 около краев токоведущего провода 19 будут притягиваться сильнее, чем частицы или гранулы 13 в середине токоведущего провода 19 (смотри далее).
В дополнительном варианте осуществления второго аспекта настоящего изобретения сенсорное устройство 15 может содержать в качестве средства создания градиента магнитного поля, по меньшей мере, два токоведущих провода 22a, 22b и, по меньшей мере, один магнитный чувствительный элемент 23, при этом, по меньшей мере, первый токоведущий провод 22a расположен с первой стороны A магнитного чувствительного элемента 23 и, по меньшей мере, второй токоведущий провод 22b расположен со второй стороны B магнитного чувствительного элемента 23, как показано на фиг.6 и 7, где представлен пример возможной конфигурации датчика в соответствии с настоящим вариантом осуществления изобретения. В соответствии с вариантами осуществления изобретения, по меньшей мере, один магнитный чувствительный элемент 23 предпочтительно может быть магниторезистивным чувствительным элементом, например, GMR, TMR или AMR чувствительным элементом.
В соответствии с настоящим вариантом осуществления изобретения сначала прилагается магнитное поле или комбинация магнитных полей, которые вызывают образование многочастичных магнитных структур или цепочек 10 из магнитных гранул, содержащих множество магнитных частиц или гранул 13, описанных ранее, и имеющих продольную ось, по существу, параллельную поверхности 40 связывания сенсорного устройства 15. Затем может быть создана мощная магнитная сила по оси z вблизи поверхности 40 связывания, в чувствительной области чувствительного элемента 23, например, пропусканием токов, по меньшей мере, по одному токоведущему проводу. Одним из примеров является применение поля, ориентированного, по существу, по оси z (внеплоскостная ориентация) и пропусканием токов в противоположных направлениях по токоведущим проводам 22a, 22b. Затем притянутые таким образом (в случае, если поля создаются так, чтобы иметь максимальную величину над датчиком) многочастичные магнитные структуры или цепочки 10 из магнитных гранул можно обнаруживать, по меньшей мере, одним магнитным чувствительным элементом при пропускании токов, по меньшей мере, по двум токоведущим проводам 22a, 22b в одном направлении, с эффективным измерением тем самым количества гранул или частиц 13, присутствующих на поверхности 40 связывания. В альтернативном варианте многочастичные структуры можно обнаруживать, например, оптическим элементом обнаружения.
Кроме того, можно использовать поля, ориентированные, по существу, по оси x или y в соответствии с настоящим изобретением, т.е. для плоскостной ориентации магнитных многочастичных структур. Магнитная сила может создаваться по оси z пропусканием токов, по меньшей мере, по одному токопроводящему проводу 22. Сила будет притягивающей, когда поля от токоведущего провода 22 усиливают локальное поле над поверхностью и тем самым создают положительный градиент поля к поверхности 14 датчика. Недостаток приложения плоскостных полей состоит в том, что они направлены вдоль направления чувствительности магнитного датчика и будут влиять на свойства магнитного сенсорного устройства 15. Одно из решений состоит в том, чтобы разделить по времени два процесса: активировать и обнаруживать частицы последовательно.
На фиг.6 представлена возможная конфигурация магнитного сенсорного устройства 15 для комплексного притягивания и обнаружения магнитных гранул или частиц 13, ориентированных в многочастичные магнитные структуры. Магнитное сенсорное устройство 15 в настоящем примере может содержать магнитный чувствительный элемент 23 и, по меньшей мере, первый и второй токоведущие провода, соответственно 22a и 22b. Данная конфигурация датчика может быть предпочтительной для притягивания магнитных гранул или частиц 13 в многочастичных магнитных структурах 10 ближе к поверхности 40 связывания 40. Одинаковый ток, но в противоположных направлениях, пропускают по первому и второму проводам 22a, 22b, расположенным по обеим сторонам A, B магнитного чувствительного элемента 23. Описание достоинств данного решения приведено ниже. Для удобства объяснения дальнейшее описание приведено для одной гранулы 13 и с полями, создаваемыми только локальными внутренними микросхемными проводами. Однако следует понимать, что такое же описание применимо к многочастичным магнитным структурам 10 в соответствии с настоящим изобретением и допускает обобщение, когда используют дополнительные средства создания полей.
Вообще говоря, магнитная сила, действующая на одну гранулу 13, дается уравнением:

где Fmagn означает магнитную силу, приложенную к магнитной грануле 13 для ее притяжения к поверхности 40 связывания, u означает потенциальную энергию, соответствующую магнитному моменту m гранулы или частицы 13, и B означает индукцию приложенного магнитного поля.
В случае интегрального возбуждающего и сенсорного устройства 15, т.е. когда средство создания градиента магнитного поля встроено в сенсорное устройство 15, что имеет место в случае с настоящим вариантом осуществления, и если магнитные гранулы или частицы 13 являются суперпарамагнитными, магнитная сила, действующая на одну гранулу 13, сводится к:

где χbead означает магнитную восприимчивость гранулы, и H означает напряженность магнитного поля. Например, для 300-нм гранул, выпускаемых компанией Ademtech, χbead равняется 4,22·10-20.
Силу притяжения в уравнении (10) можно разложить на компоненты по осям x и z, т.е. соответственно на горизонтальную и вертикальную компоненты:

и

На фиг.7 представлено поперечное сечение сенсорного устройства 15, изображенного на фиг.6. Магнитный чувствительный элемент 23 и первый и второй токоведущие провода 22a, 22b расположены на верху подложки 24. Пунктирная линия, обозначенная позицией 14, представляет поверхность датчика сенсорного устройства. Участок поверхности 14 датчика является поверхностью 40 связывания, содержащей центры связывания (подробно не показанные). На фиг.7 изображена координатная система для большей ясности нижеследующего объяснения.
На фиг.8 показана зависимость вертикальной магнитной силы Fmagn,z(x) (смотри уравнение (12)), т.е. магнитной силы в направлении, перпендикулярном поверхности 14 датчика, а именно в направлении по оси z, указанной в координатной системе на фиг.7, от положения магнитной частицы или гранулы 13 в направлении повышенной чувствительности датчика, а именно в направлении по оси x. В конструкции на фиг.8 Fmagn,z(x) определяется на расстоянии 0,64 мкм от поверхности 40 связывания (т.е. z=0,64 мкм). В настоящей ситуации токи возбуждения в первом и втором токоведущих проводах 22a, 22b протекают в противоположных направлениях, как поясняется выше применительно к фиг.6 и указано на фиг.8 значками

На фиг.9 показана зависимость соответствующей горизонтальной магнитной силы Fmagn,x(x) (уравнение (11)), т.е. магнитной силы в направлении изменения чувствительности магнитного сенсорного устройства 15, а именно в направлении по оси x, показанной в системе координат на фиг.7, от положения магнитных гранул 13 в направлении по оси x. И снова в конструкции, представленной на фиг.9, Fmagn,x(x) определяется на расстоянии 0,64 мкм от поверхности 40 связывания (т.е. z=0,64 мкм). Из фиг.9 можно видеть, что горизонтальная магнитная сила Fmagn,x(x) намного больше в середине первого и второго токоведущих проводов, соответственно 22a и 22b, чем на краях токоведущих проводов 22a, 22b. Это означает, что магнитные частицы или гранулы 13, расположенные над центром токоведущих проводов 22a, 22b будут сильнее транспортироваться в направлении по оси x, чем магнитные частицы или гранулы 13, расположенные над краями токоведущих проводов 22a, 22b. То же самое относится к образованным многочастичным магнитным структурам 10. Силы, действующие на многочастичную магнитную структуру 10, больше, чем силы, действующие на одну гранулу (если многочастичная магнитная структура 10 содержит, например, множество гранул 13 такого же типа, как гранула, с которой производится сравнение) благодаря более сильным магнитным моментам многочастичной магнитной структуры 10.
На фиг.10 представлены величина, показанная кривой 25, и фаза, показанная кривой 26, результирующей магнитной силы (сумма Fmagn,z(x) на фиг.8 и Fmagn,x(x) на фиг.9). Из фиг.10 видно, что над центрами токоведущих проводов 22a, 22b магнитное поле ориентировано точно в плоскости (0°). Кривые, показанные на фиг.8, фиг.9 и фиг.10, получают при условии, что не образуются многочастичные структуры и не прилагается внешнее магнитное поле.
Из-за действия вышеописанных сил магнитные частицы или гранулы 13 транспортируются над поверхностью 14 датчика к краям первого и второго токоведущих проводов 22a, 22b.
Частицы или гранулы 13 находятся также под действием силы тяжести. Сила тяжести, действующая на магнитные частицы или гранулы 13, Fgrav, равна:

где r означает радиус магнитной частицы или гранулы 13, Δρ означает разность массовых плотностей гранулы и жидкости, и g означает ускорение под действием силы тяжести (9,81 Н/кг). В результате, расстояние приближения ξ на поверхности 14 сенсорного устройства 15, называемое также иногда расстоянием притяжения и именуемое также распределением локальной барометрической высоты, равно:
Расстояние приближения или распределение барометрической высоты, ξ, показано на фиг.11, где представлена барометрическая высота, обусловленная вертикальной магнитной силой Fmagn,z(x) плюс гравитацией. Данная кривая получена при условии, что не образуются многочастичные структуры и не прилагается внешнее магнитное поле. Из данной фигуры можно сделать вывод, что, в конфигурации с размерами, указанными для фиг.6-12, в диапазоне -3 мкм ≤x≤18 мкм, который получен прибавлением одной ширины провода с обеих сторон структуры проводов датчика, кроме позиций в середине первого и второго токоведущих проводов 22a, 22b, локальная барометрическая высота или расстояние приближения ξ≤100 нм. В результате, магнитные частицы или гранулы 13 очень близко притягиваются к поверхности 40 связывания, что способствует эффективному биохимическому связыванию. На фиг.12 показана локальная барометрическая длина в направлении суммарной силы, т.е. барометрическая длина, обусловленная магнитной силой плюс гравитацией. Различие между фиг.11 и фиг.12 состоит в том, что фиг.11 представляет взаимосвязь между вертикальными магнитными силами, гравитацией и распределением гранул в направлении по оси z, называемым по этой причине барометрической высотой, тогда как фиг.12 представляет взаимосвязь между распределением гранул в направлении силы, которая не перпендикулярна датчику. Поэтому такое распределение называют барометрической длиной.
Полученный выше диапазон (-3 мкм ≤ x ≤ 18 мкм), который образован прибавлением одной ширины провода с обеих сторон структуры проводов датчика, адекватно подходит к кривой чувствительности в синфазном режиме сенсорного устройства 15, представленной на фиг.17, которая получена, когда по первому и второму проводам 22a, 22b пропускают токи равной амплитуды в одном направлении, как показано на фиг.13. Кривая синфазного режима является зависимостью чувствительности обнаружения датчика от положения гранул на поверхности датчика при условии, что токи в обоих токоведущих проводах протекают в одном направлении (вследствие чего такой режим называется синфазным). Описанная конфигурация допускает обнаружение магнитных частиц или гранул 13.
На фиг.14, фиг.15 и фиг.16 представлены соответственно вертикальная магнитная сила, горизонтальная магнитная сила и суммарная магнитная сила для случая, когда по первому и второму токоведущим проводам 22a, 22b протекают равные токи в одном направлении. На фиг.17 представлена кривая чувствительности в синфазном режиме в плоскости y-z для датчика в конфигурации, показанной на фиг.13. На фиг.18 представлена барометрическая высота или расстояние приближения магнитных частиц или гранул 13 в случае токов равной амплитуды, пропускаемых в одном направлении по обоим, первому и второму, токоведущим проводам 22a, 22b. Кривая на фиг.18 показывает, что магнитные частицы или гранулы 13 намного слабее притягиваются к поверхности 40 связывания, поэтому связывание не оптимально.
Данный вариант осуществления изобретения дает преимущество в том, что как средство для притягивания гранул 13, так и средство для обнаружения гранул 13 интегрированы на подложке 24 магнитного датчика. В данном варианте осуществления не требуется внешнего средства активирования для притягивания гранул 13.
Однако, в соответствии с дополнительным вариантом осуществления изобретения, к сенсорному устройству 15 можно прилагать дополнительные внешние магнитные поля, как описано в прежнем варианте осуществления, для, например, достижения еще более ускоренного притяжения магнитных частиц или гранул 13 из объема к поверхности 40 связывания или для перемешивания. Однако дополнительное внешнее магнитное поле со слабым градиентом не развивает силу, необходимую для притяжения магнитных частиц или гранул 13 близко к поверхности 40 связывания. В предпочтительном варианте можно использовать переменные (AC) поля в качестве подобных дополнительных внешних магнитных полей. Постоянные (DC) поля, которые могут создаваться, например, постоянными магнитами, будут сдвигать характеристику R(H) изменения сопротивления от магнитного чувствительного элемента 23 и вводить изменения коэффициента усиления. Напротив, AC-поля будут лишь вводить дополнительные частотные компоненты, которые могут или не могут создавать помехи механизму обнаружения и могут или не могут вводить погрешности коэффициента усиления. Поэтому в предпочтительном варианте можно применять AC-поля, которые имеют такую частоту, чтобы не оказывать влияния на механизм обнаружения. Кроме того, нарастание и затухание огибающей таких дополнительных внешних магнитных полей должны происходить относительно медленно по сравнению с фактической частотой, чтобы не вызывать нарастания магнитного поля в датчике. Резкое переключение магнитных полей наведет остаточные магнитные поля в датчике. При медленном повышении и снижении амплитуды можно исключить такой эффект.
В другом варианте осуществления настоящего изобретения механизм притягивания - обнаружения магнитной частицы или гранулы можно реализовать локально и последовательно во времени на мультисенсорном биочипе, содержащем множество сенсорных устройств 15. Каждый раз, когда сенсорное устройство 15 в микросхеме получает питание или применяется для притягивания и/или обнаружения магнитных частиц или гранул 13, комбинации из объекта исследования - гранулы - антитела образуют очень прочную связь на поверхности 40 связывания данного сенсорного устройства 15. В тот же самый период времени другие неиспользуемые сенсорные устройства 15 в биочипе содержат неустановленные слабо связанные магнитные частицы или гранулы 13, которые можно легко смыть. При этом каждое сенсорное устройство 15 в микросхеме можно использовать по отдельности, поэтому биочип пригоден для непрерывного или периодического контроля.
Каждый раз, когда выполняется измерение одним из сенсорных устройств 15 в биочипе, неустановленные связанные молекулы и гранулы 13 на других (неиспользуемых) сенсорных устройствах 15 смываются перед следующим измерением. В одном из вариантов одно и то же сенсорное устройство 15 можно использовать несколько раз, когда прочно связанные гранулы не удаляют, а используют в виде исходной (калибровочной) точки для следующего измерения.
Для сенсорных устройств 15 с неравномерной чувствительностью по поверхности 14 датчика прилагаемые магнитные поля следует комбинировать так, чтобы обеспечивать максимальную плотность связанных частиц или гранул 13 в областях высокой чувствительности сенсорного устройства 15 (смотри далее).
Выше в настоящем описании приведены вычисления распределения силы и их сравнения с участками максимальной чувствительности. Магнитные структуры, например, отдельные магнитные частицы или многочастичные магнитные структуры, или цепочки 10 из магнитных гранул будут притягиваться к поверхности 40 связывания, на которой частицы или гранулы 13 можно обнаруживать детектором или чувствительным элементом 23. В соответствии с вариантами осуществления изобретения сила притяжения (Fmagn,z) может быть достаточной для приближения частиц или гранул 13 к поверхности 14 датчика на расстояние в пределах порядка нанометров, т.е. в пределах размера биологических молекул, которыми может быть модифицирована поверхность 14 датчика для формирования поверхности 40 связывания, чтобы связывать намеченные молекулы, присутствующие в жидкости, подлежащей анализу, которые связываются с магнитными частицами или гранулами 13.
В случае с сенсорными устройствами 15 с равномерной чувствительностью по поверхности связывания покрытие поверхности магнитными частицами или гранулами 13 должно быть насколько возможно равномерным, т.е. магнитные структуры, например, отдельные магнитные частицы, или многочастичные магнитные структуры, или цепочки 10 из магнитных гранул, не должны притягиваться только к краям сенсорных устройств. Равномерное распределение частиц можно обеспечить в следующих условиях.
Силы, действующие в плоскости на частицы или гранулы 13, должны быть ничтожно малыми (Fmagn.x=Fmagn,y≈0).
Сила притяжения частиц или гранул 13 должна быть равномерной по поверхности 40 связывания (Fmagn,z=constant).
С использованием уравнения (1) и того факта, что магнитный момент m пропорционален прилагаемому магнитному полю B, можно установить, что:
и
при

В случае трансляционной симметрии по оси y, уравнения (15)-(17) можно упростить принятием By=0 и d/dy=0:


и

где уравнение (20) выведено из уравнение Максвелла ∇B=0.
В соответствии с вариантами осуществления настоящего изобретения возможные схемы расположения токоведущих проводов 22, которые можно применять в соответствии с настоящим изобретением для создания таких полей, которые вызывают равномерное притягивание по поверхности 14 датчика, схематично показаны на фиг.19 и 20, на которых представлены поперечные сечения возможных конфигураций токоведущих проводов для создания однородного распределения частиц на поверхности 14 датчика сенсорного устройства 15. На данных фигурах токи в токоведущих проводах 22 протекают в направлении, перпендикулярном плоскости чертежа.
В соответствии с вариантами осуществления изобретения изменение градиента магнитного поля в направлении по оси x (и, следовательно, магнитной силы в направлении по оси x) можно ослабить введением дополнительных токоведущих проводов 27, например, добавлением токоведущего провода 27 ниже токоведущего провода 22 (фиг.19) или добавлением токоведущих проводов 27a, 27b вблизи токоведущего провода 22 (фиг.20). Токоведущие провода, добавленные в альтернативном варианте, могут составлять множество токоведущих проводов, так называемую подсистему токоведущих проводов.
В случае фиг.19 получаемое непрямоугольное распределение тока может создать более однородное распределение частиц или гранул 13 на поверхности 14 связывания сенсорного устройства 15, чем один токоведущий провод 22 прямоугольного сечения. В варианте осуществления, показанном на фиг.19, созданное магнитное поле является более однородным, чем в варианте осуществления с одним токоведущим проводом 22, так как коэффициент формы комбинации токоведущих проводов достигает единицы. Чем ближе коэффициент формы токоведущего провода (или комбинации токоведущих проводов) к единице, тем более однородным является создаваемое магнитное поле. Наиболее однородное магнитное поле создавалось бы круглым токоведущим проводом, если бы поверхность 40 связывания была круглой, а также концентрично расположенной вокруг токоведущего провода. Комбинации токоведущих проводов, показанные на фиг.19 и фиг.20, можно, например, применять вместо каждого из токоведущих проводов, показанных на фиг.7. В альтернативном варианте комбинации токоведущих проводов, показанные на фиг.19 и фиг.20, можно, например, применять сами по себе, вблизи одного магнитного чувствительного элемента.
На фиг.21 показан токоведущий провод 22, который притягивает кластер частиц или гранул 13 к поверхности 14 связывания, в то время как частицы или гранулы 13 обнаруживаются чувствительным элементом 23. Токоведущий провод 22 может обладать меньшим электрическим сопротивлением, чем чувствительный элемент 23, поэтому токоведущий провод 22 более пригоден для создания магнитных полей.
Как пояснялось выше в отношении второго аспекта настоящего изобретения, плоскостное магнитное поле может создавать плоскостные многочастичные магнитные структуры или цепочки 10 из магнитных гранул. Данные многочастичные магнитные структуры или цепочки 10 из магнитных гранул могут притягиваться, в некоторых вариантах осуществления, к поверхности 14 датчика градиентами магнитного поля, ориентированными в направлении, по существу, перпендикулярном поверхности 14 датчика и наводимыми, например, токоведущими проводами 22, расположенными вблизи поверхности 14 датчика. Градиенты магнитного поля, наводимые токоведущими проводами 22, в случае с круглым токоведущим проводом 22 и без учета матричных эффектов от окружения могут быть, по существу, осесимметричными. Это означает, что существует также плоскостной градиент, который прикладывает усилия, по существу, перпендикулярно осям многочастичных магнитных структур или цепочкам 10 из магнитных гранул на поверхности 14 датчика. Это приведет к неравномерному распределению многочастичных магнитных структур или цепочек 10 из магнитных гранул.
Решением данной проблемы является применение одномерного упорядоченного множества 28 токоведущих проводов 22a, 22b, 22c и последовательное пропускание тока по данным токоведущим проводам 22a, 22b, 22c. Это показано на фиг.22. В правой части данного чертежа в разрезе показано упорядоченное множество 28 токоведущих проводов 22a, 22b, 22c. Плоскостной градиент изменяется. Многочастичные магнитные структуры или цепочки 10 из магнитных гранул перекатываются по поверхности 14 датчика, чтобы создавалось постоянное движение качения и тем самым совершенствовалась кинетика связывания, так как все части многочастичных магнитных структур или цепочек 10 из магнитных гранул приходят в тесный контакт с поверхностью связывания 40 при таком движении качения. Главное направление магнитного поля указано стрелкой 29.
Дополнительным вариантом осуществления в соответствии с настоящим изобретением является благоприятная комбинация первого и второго вариантов осуществления. Магниторезистивные чувствительные элементы 23 чувствительны, например, к плоскостным полям. В случае если для манипулирования частицами необходимы сильные поля, эти поля прилагают предпочтительно вне плоскости.
В данном варианте осуществления магнитные поля, необходимые для входящего в процесс этапа «притягивания», прилагаются вне плоскости. Поэтому направление магнитного поля изменяется к плоскостному направлению для входящего в процесс этапа «связывания» (как во втором варианте осуществления). В предпочтительном варианте прилагаемое магнитное поле поворачивают так, чтобы сохранить цепочки 10 гранул 13, но переориентировать их так, чтобы их продольная ось находилась, по существу, в плоскости, в направлении, по существу, параллельном поверхности 14 сенсорного устройства 15. На фиг.23 схематично изображен один пример, который представляет сенсорное устройство 15 и два внешних средства создания градиента магнитного поля, в приведенном примере - две внешние катушки 16a, 16b индуктивности. С помощью двух катушек 16a, 16b индуктивности можно наводить плоскостное магнитное поле, вынуждающее многочастичные магнитные структуры или цепочки 10 магнитных гранул из частиц или гранул 13 (образованные во внешне приложенном в неплоскостном поле) поворачиваться и укладываться плоско относительно поверхности 40 связывания. Градиент магнитного поля притягивает многочастичные магнитные структуры или цепочки 10 из магнитных гранул к поверхности 14 датчика сенсорного устройства 15.
В других вариантах осуществления в соответствии с настоящим изобретением, чтобы активировать магнитные частицы 13, можно применять однородные внешние поля, неоднородные внешние поля или внутренние микросхемные токоведущие провода. На фиг.24 представлены примеры последовательностей сигналов для управления разными средствами создания полей. Кривая 30 показывает внутримикросхемные токи в токоведущих проводах 22a, 22b для притягивания магнитных частиц или гранул 13 к поверхности 14 датчика. Кривая 31 показывает последовательность возбуждения небольшой внешней катушки индуктивности. Часть 31a кривой 31 представляет притягивание гранул из объема к поверхности 14 датчика, и часть 31b представляет силу отталкивания в объем. Кривая 32 показывает последовательность возбуждения крупной катушки индуктивности для намагничивания частиц или гранул 13 и формирования столбцов или цепочек 10.
Настоящее изобретение описано, в основном, с использованием магниторезистивных датчиков 23 для обнаружения магнитных частиц или гранул 13. Однако следует отметить, что гранулы 13 можно также обнаруживать другими магнитными сенсорными средствами, например датчиками Холла, катушками индуктивности и т.п.
Как пояснялось выше, в вариантах осуществления в соответствии с настоящим изобретением можно также применять усиленное вращение гранул 13 для повышения скорости этапа «связывания».
Второй аспект настоящего изобретения обладает иными преимуществами. Благодаря большому объему и получаемым, в результате, большим усилиям сдвига многочастичные структуры 10 быстрее реагируют на этапах смывания жидкостью, чем отдельные частицы 13. В результате, повышается эффективность смывания и ослабляется неспецифическое связывание.
Кроме того, для многочастичных структур 10 силы гравитационного притяжения могут быть выше, чем для отдельных частиц 13. В основу разных аспектов настоящего изобретения положено использование магнитных сил. Однако силы гравитационного притяжения потребуют введения соответствующих поправок и допускают эффективное использование (например, на этапе «притягивания»).
Другое преимущество применения многочастичных структур в соответствии со вторым аспектом изобретения состоит в том, что скопления 10 магнитных гранул 13 обладают большим (совместным) магнитным моментом и поэтому допускают манипулирование с использованием градиентов поля, меньших, чем градиенты, необходимые для манипулирования отдельными гранулами 13. Такие градиенты магнитного поля можно наводить, например, магнитом или катушкой индуктивности, размещенными под сенсорным устройством 15 и/или внутренними микросхемными токоведущими проводами 22a, 22b.
Магнитные гранулы 13, применяемые в соответствии с любым из первого или второго аспектов изобретения, могут притягиваться к поверхности 14 датчика из пробы большого объема с использованием одних магнитных сил или в сочетании с процессами осаждения и диффузии. Кроме того, цепочки 10 из магнитных гранул 13 в соответствии со вторым аспектом изобретения могут притягиваться к поверхности 40 связывания, что создает локально высокую концентрацию гранул, хороший контакт между гранулами и поверхностью 40 связывания датчика и, тем самым, обеспечивает высокую скорость связывания.
Все процессы с гранулами 13 вблизи поверхности 14 датчика (например, притягивание, связывания, повышение специфичности и их повторения) можно измерять в их зависимости от времени. Данные характеризуют кинетику процессов. Кинетика зависит от концентрации объектов анализа в растворе, и, по существу, данные могут указывать, какова была концентрация объектов анализа, как только сигнал начинает превышать шумы. Измерение кинетики допускает также измерение в большом динамическом диапазоне, так как высокая концентрация объектов анализа будет обнаруживаться очень быстро (например, через несколько секунд), а низкую концентрацию объектов анализа можно обнаруживать по истечении намного большего времени обработки (например, от минут до часов). Кроме того, сигналы кинетики и шумов можно анализировать в рамках контроля качества, чтобы проверить, выполнялся ли анализ правильно, и гарантировать конечному пользователю, что результат теста надежен.
Следует понимать, что, хотя в настоящем описании представлены предпочтительные варианты осуществления, конкретные конструкции и конфигурации, а также материалы для устройств в соответствии с настоящим изобретением, в форму и детали можно вносить различные изменения или модификации, не выходящие за пределы объема и существа настоящего изобретения. Например, изобретение описано при посредстве магнитного обнаружения магнитных частиц 13. Магнитное обнаружение может выполняться магнитными датчиками, встроенными в часть одноразового применения (микросхему и/или кассету), но следует также понимать, что магнитные датчики могут также входить в состав системы считывания многоразового применения (например, головки считывания, которую подводят вплотную к кассете). Кроме того, в соответствии с изобретением магнитные частицы 13 можно также обнаруживать любым другим подходящим способом, например оптическим средством обнаружения. Оптический детектор может входить в состав системы считывания одноразового применения (микросхемы и/или кассеты) или многоразового применения.
Реферат
Изобретение относится к медицинской технике, а именно биодатчикам, и представляет собой сенсорное устройство для обнаружения магнитных частиц. Устройство имеет поверхность связывания с центрами связывания и содержит чувствительный элемент для обнаружения магнитных частиц, средство для притягивания магнитных структур, содержащих по меньшей мере одну магнитную частицу, к поверхности и на поверхность связывания, средство для изменения порядка и рандомизации расположения отдельных магнитных частиц относительно центров связывания. Средство для изменения порядка и рандомизации выполнено таким образом, чтобы отдельные магнитные частицы откреплялись от поверхности связывания так, чтобы 90% отдельных магнитных частиц, которые входят в состав магнитной структуры, оставались в пределах 10% от объема пробы. Способ измерения биоинформации заключается в том, что притягивают магнитные структуры, содержащие, по меньшей мере, одну магнитную частицу к поверхности и на поверхность связывания сенсорного устройства, и изменяют порядок и рандомизируют расположение отдельных магнитных частиц относительно центров связывания. Использование изобретения позволяет повысить скорость обнаружения намеченных молекул в жидкости. 2 н. и 17 з.п. ф-лы, 28 ил.
Формула
по меньшей мере, один чувствительный элемент (23) для обнаружения присутствия магнитных частиц (13),
средство для притягивания магнитных структур к поверхности и на поверхность (40) связывания сенсорного устройства (15), причем упомянутые магнитные структуры содержат, по меньшей мере, одну магнитную частицу (13), и
средство для изменения порядка и рандомизации расположения отдельных магнитных частиц (13) относительно центров связывания на поверхности (40) связывания, чтобы предоставить центрам связывания на всех отдельных магнитных частицах (13) большую вероятность наличия времени контакта с центрами связывания на поверхности (40) связывания;
причем магнитные частицы (13) присутствуют в объеме пробы, при этом упомянутое средство для изменения порядка и рандомизации расположения отдельных магнитных частиц (13) выполнено таким образом, чтобы отдельные магнитные частицы (13) откреплялись от поверхности (40) связывания так, чтобы 90% отдельных магнитных частиц (13), которые входят в состав магнитной структуры (10), оставались в пределах 10% от объема пробы;
и при этом отдельные магнитные частицы (13) остаются на расстоянии не дальше чем 100 мкм от поверхности связывания в направлении, по существу, перпендикулярном поверхности связывания.
причем способ содержит этапы, на которых:
притягивают магнитные структуры, содержащие, по меньшей мере, одну магнитную частицу (13) к поверхности и на поверхность (40) связывания сенсорного устройства (15), и
изменяют порядок и рандомизируют расположение отдельных магнитных частиц (13) относительно центров связывания на поверхности (40) связывания, чтобы предоставить центрам связывания всех упомянутых частиц (13) большую вероятность наличия времени контакта с центрами связывания на поверхности (40) связывания.
прилагают первое магнитное поле для формирования внеплоскостных многочастичных структур, и
затем прилагают второе магнитное поле для ориентирования многочастичных структур так, чтобы их продольная ось установилась, по существу, в плоскости, по существу, параллельной поверхности (40) связывания сенсорного устройства (15).
Комментарии