Врубовая установка и способ ее работы - RU2537449C2
Код документа: RU2537449C2
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ
Данное изобретение относится к врубовой машине и способу, с помощью которого врубовая машина может быть приведена в движение по ширине разрабатываемого пласта, содержащего породу. Данное изобретение применяется, в частности, хотя не исключительно, для разработки месторождения угля в сплошном забое. Более конкретно, данное изобретение относится к устройству и способу для управления действиями длиннозабойного угольного комбайна в сплошном забое с отслеживанием его расположения относительно плоскости выемочной панели угля.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
В области, связанной с добычей угля, к настоящему времени разработаны способы, которые относятся к способам разработки месторождения сплошным забоем. В соответствии с этими способами подвижный рельс помещают с расположением поперек угольного пласта. Врубовую машину, снабженную режущей головкой или стругом, перемещают с поперечной подачей вдоль рельса в одном направлении вдоль пласта, при этом выполняют управление перемещением режущей головки или струга вверх и вниз для срезания угля с плоскости пласта. При каждом проходе рельс перемещают вперед к пласту, расположенному за траекторией врубовой машины. Затем обеспечивают прохождение врубовой машины с пересечением пласта в противоположном направлении с одновременным подъемом и опусканием режущей головки для удаления следующего количества угля из пласта. Данный процесс повторяют до тех пор, пока не закончится весь уголь в планируемом выемочном поле. Для защиты врубовой машины от падающей породы над рельсом и врубовой машиной располагают приводную опору кровли выработки, которая перемещается вместе с рельсом.
Транспортировка угля из пласта выполняется посредством забойного скребкового конвейера. Каждая секция этого конвейера присоединена к приводной опоре кровли посредством реверсивного гидравлического цилиндра или силового цилиндра двустороннего действия. После выемки угля перед данной секцией конвейера соответствующую ей опору кровли опускают и продвигают вперед, а затем гидравлическим способом «приставляют» к кровле с последующим выдвижением секцию забойного конвейера. Патент США №4228508 иллюстрирует подобную длиннозабойную систему разработки месторождения. Таким образом, посредством продвижения рельсового средства к пласту на соответствующее расстояние после каждого прохода можно постепенно проходить в пласт с приблизительно равной глубиной срезания при каждом проходе.
Надлежащее поддержание расположения плоскости врубовой машины относительно плоскости выемочной панели является важным для максимального увеличения производительности длиннозабойной разработки угольного месторождения. Другими словами, и как в дальнейшем проиллюстрировано на чертежах, важно иметь уверенность в том, что врубовая машина, или струг, расположена параллельно срезаемой плоскости породы. Отклонение относительно плоскости выемочной панели может потребовать выполнения дополнительного срезания, чтобы снова получить желательный профиль выемочной панели, что приводит к значительной потере производительности. Подобное отклонение могут создать различные неблагоприятные обстоятельства, такие как ошибка оператора, нарастание обломков породы на подстилающей поверхности забоя, неравномерность подстилающей поверхности или кровли выработки, а также ухудшающиеся эксплуатационные характеристики гидравлических компонентов угольного комбайна.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью данного изобретения является обеспечение надлежащего расположения плоскости длиннозабойной врубовой машины по мере продвижения машины последовательно через рудоносный участок.
В данном изобретении врубовая машина содержит выравнивающее средство, предназначенное для определения относительного углового расположения между врубовой машиной и опорой кровли выработки, которое, в свою очередь, связано с надлежащим расположением врубовой машины относительно плоскости выемочной панели. Выравнивающее средство содержит источник света в виде лазера, расположенный на врубовой машине и направленный на опору кровли. Выравнивающее средство также содержит направляющий элемент, расположенный на опоре кровли выше врубовой машины, так что когда расположение между врубовой машиной и опорой кровли соответствует требуемому расположению, свет, испускаемый указанным источником света, попадает в заданное место относительно указанного направляющего элемента. Когда врубовая машина находится в ненадлежащем расположении относительно опоры кровли, источник света не попадает в заданное место относительно указанного направляющего элемента, как показано на фиг.3. Когда оператор врубовой машины обнаруживает, что свет от источника не попадает в заданное место относительно направляющего элемента, он регулирует наклон врубовой машины, используя гидравлические цилиндры, так чтобы испускаемый источником свет снова попадал в заданное место относительно указанного направляющего элемента.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
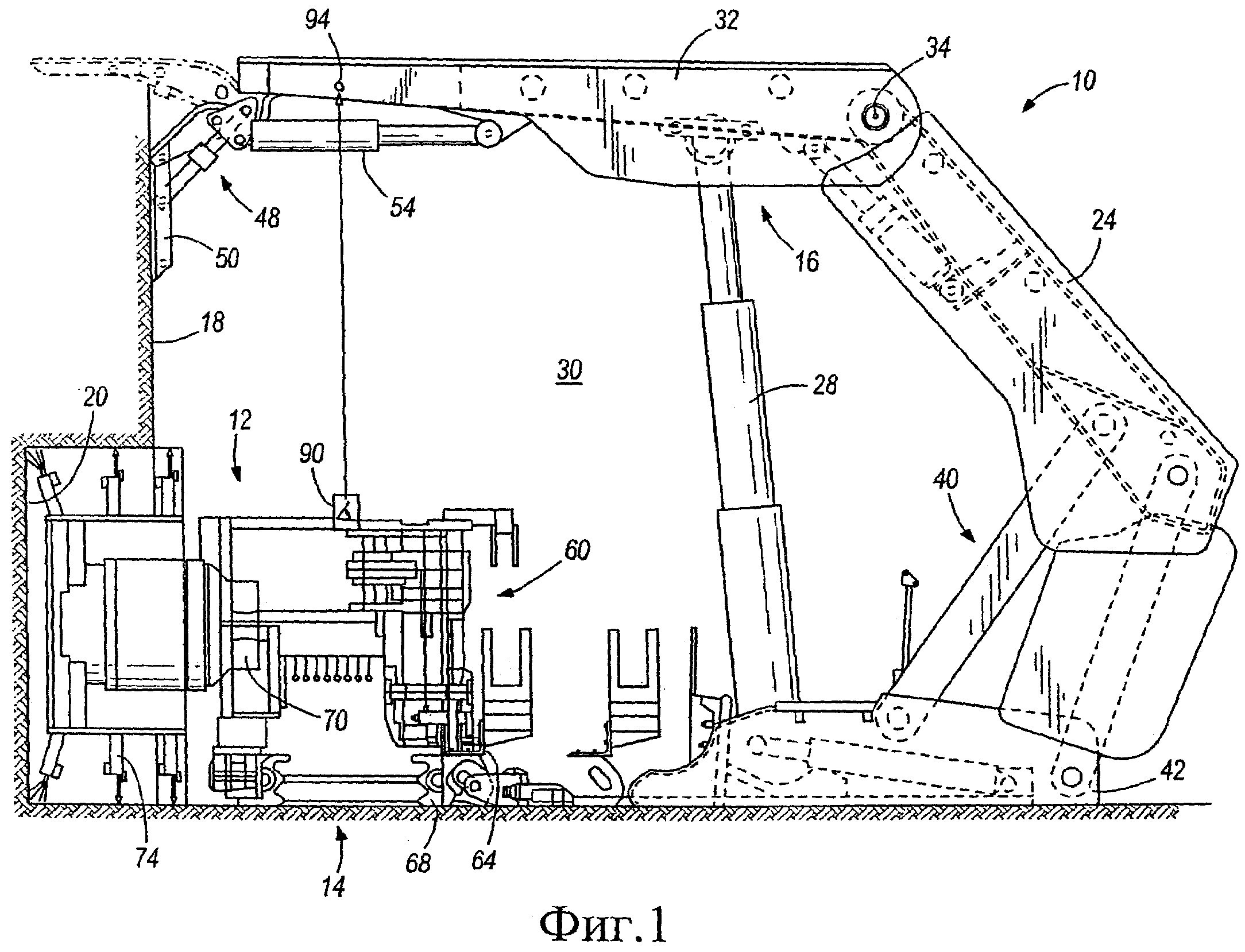
Фиг.1 изображает вид сбоку длиннозабойной врубовой машины, продвигающейся через пласт породы, и иллюстрирует систему, обеспечивающую выравнивание с плоскостью забоя.
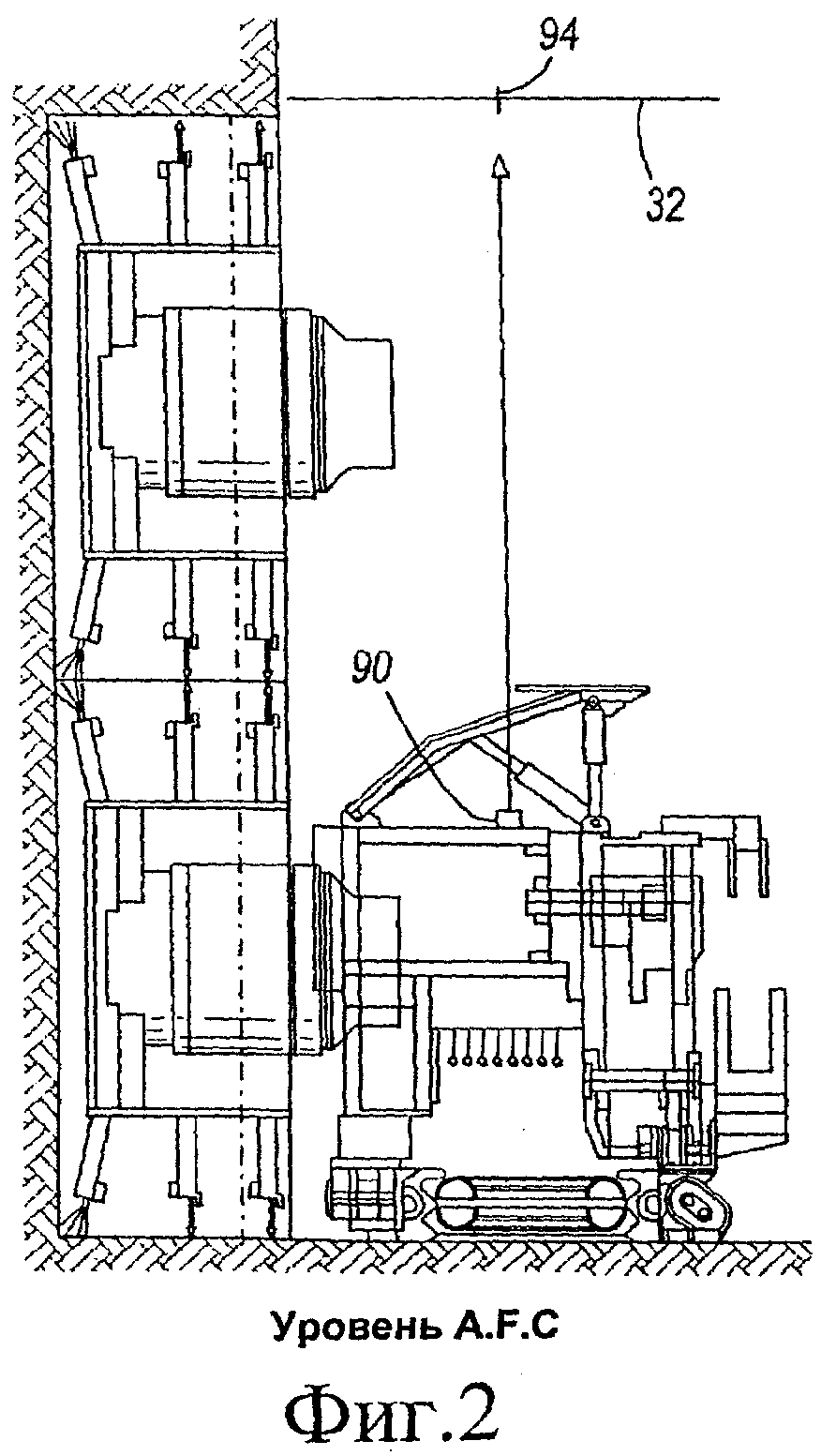
фиг.2 изображает вид сбоку врубовой машины, показанной на фиг.1, в положении правильного расположения относительно плоскости выемочной панели;
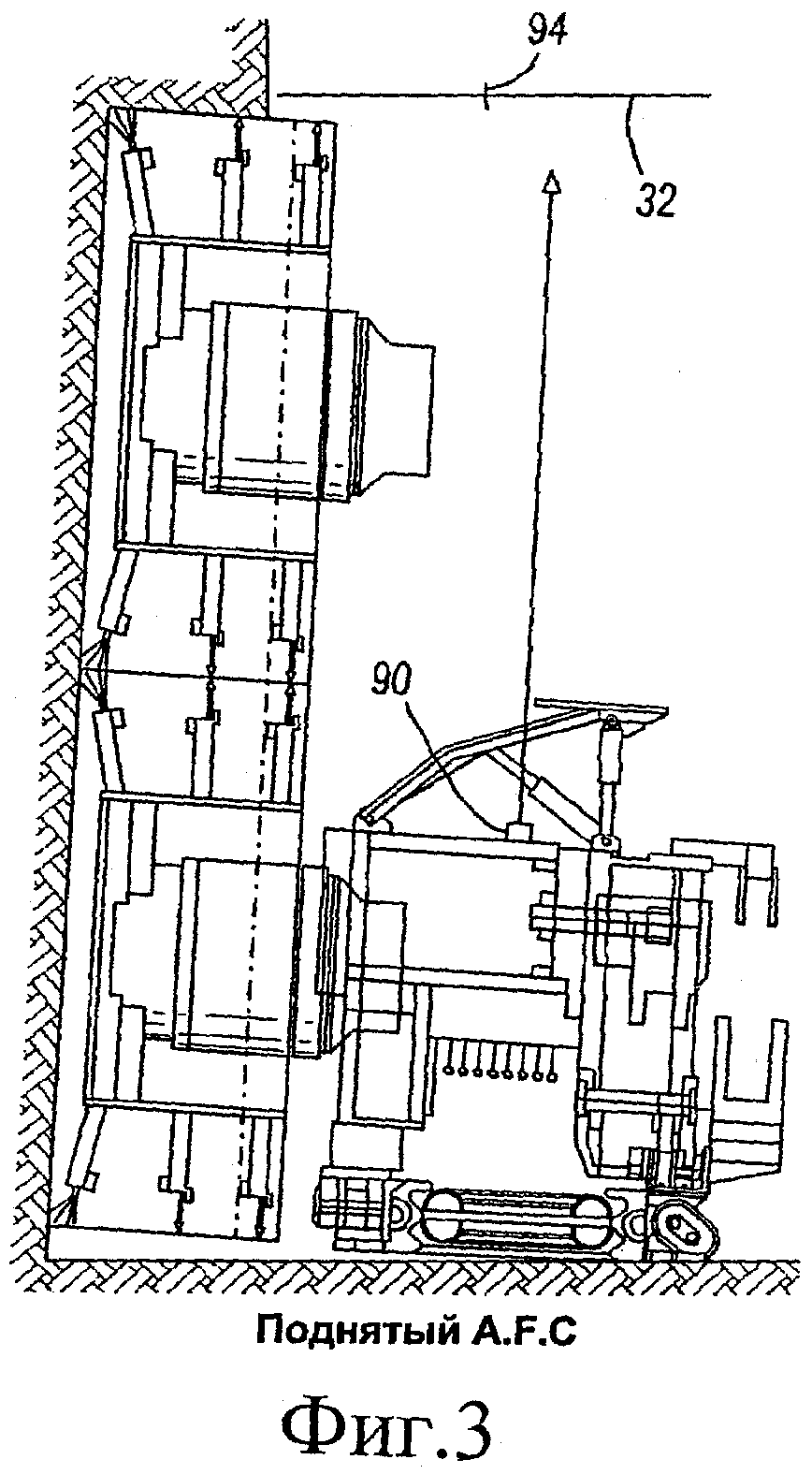
фиг.3 изображает вид сбоку врубовой машины, показанной на фиг.1, в положении неправильного расположения относительно плоскости выемочной панели;
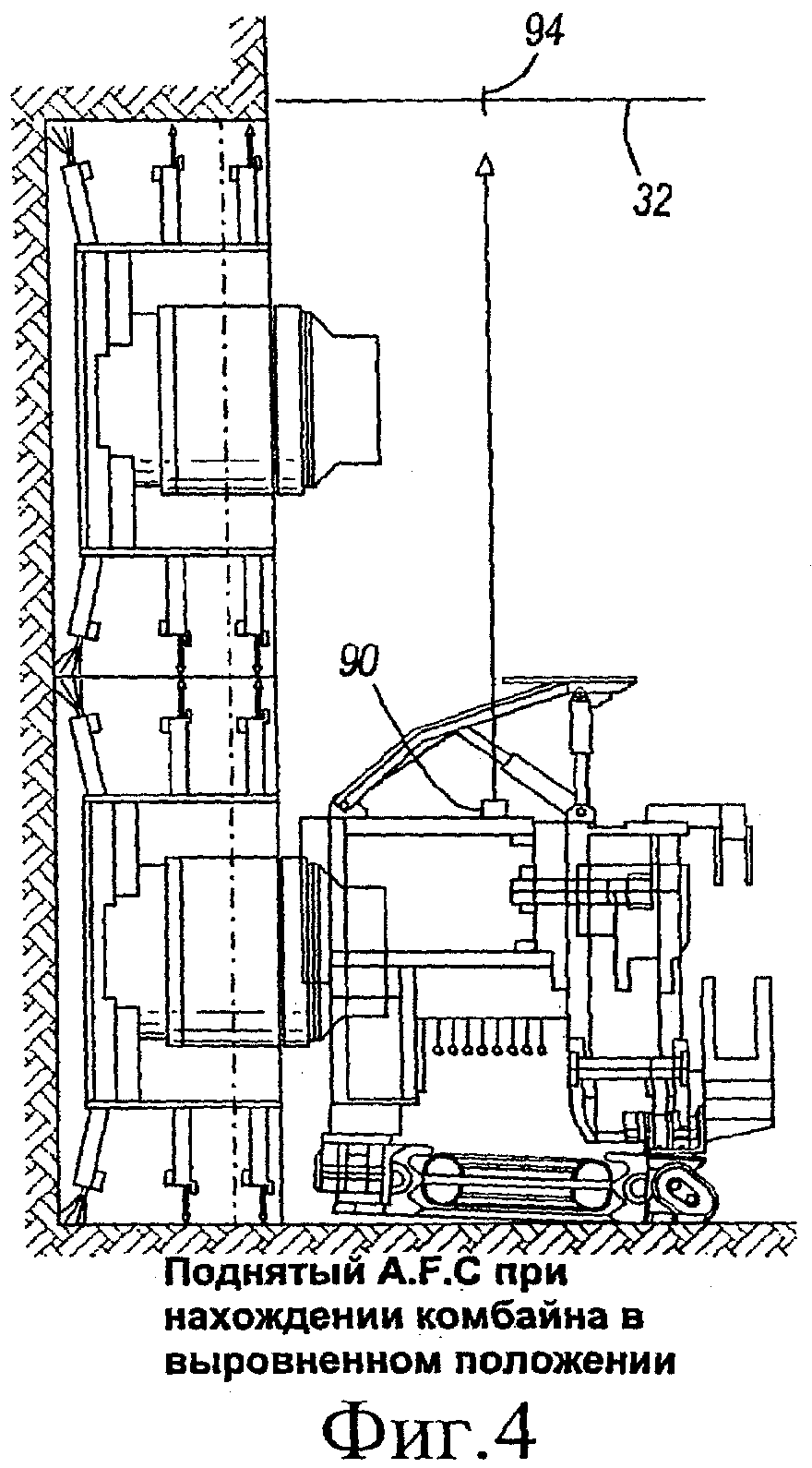
фиг.4 изображает вид сбоку врубовой машины, показанной на фиг.1, в положении откорректированного расположения относительно плоскости выемочной панели;
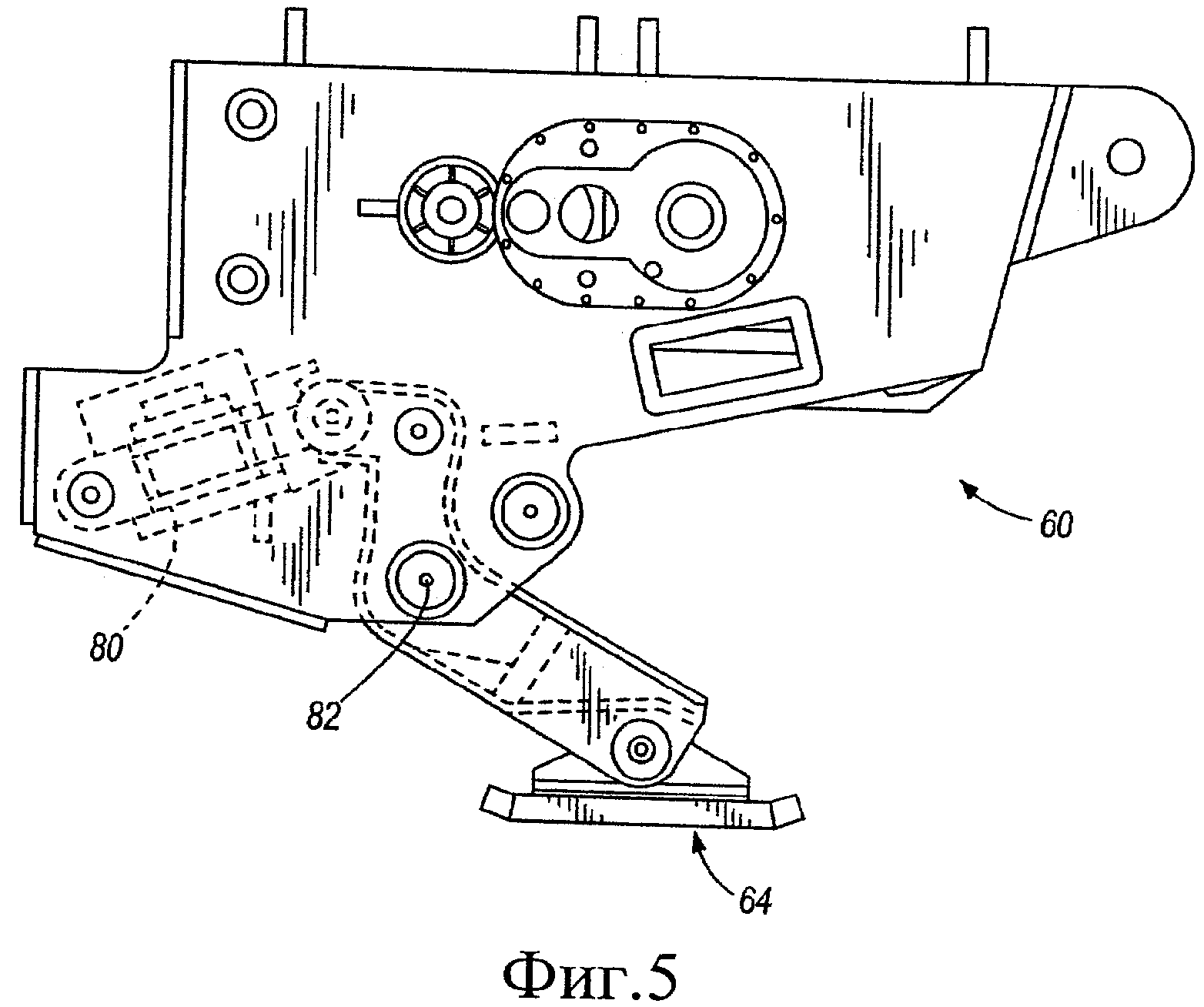
фиг.5 изображает вид сбоку башмака, установленного на врубовой машине и предназначенного для корректирования отклонения врубовой машины от правильного расположения относительно плоскости выемочной панели.
Перед подробным описанием одного варианта выполнения изобретения следует понять, что данное изобретение не ограничивается его применением для деталей конструкции и расположения компонентов, рассматриваемых в последующем описании или проиллюстрированных на чертежах. Данное изобретение может иметь другие варианты выполнения и использовано на практике или выполнено различными способами. Кроме того, следует понимать, что фразеология и терминология, используемые в данном документе, приведены с целью описания и не должны рассматриваться как ограничительные. Использование в данном документе терминов «включающий» и «содержащий», а также производных от них означает охват перечисленных за ними элементов и их эквивалентов, а также дополнительных элементов. Использование в данном документе термина «состоящий из» и производных от него означает охват только перечисленных за ними элементов и их эквивалентов. Далее, следует понимать, что такие термины, как «передний», «задний», «левый», «правый», «верхний» и «нижний», и т.д., являются терминами, используемыми для удобства, которые не следует толковать как ограничительные.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Фиг.1 иллюстрирует длиннозабойную систему 10, содержащую врубовую машину 12 в виде комбайна (расположенную на забойном конвейере 14) и консольные опоры 16 кровли выработки. По мере продвижения системы 10 через выемочную панель 18 передвижные опоры 16 продвигаются к плоскости 20 забоя известным способом.
Более конкретно, консольная опора 16 является оградительно-поддерживающей крепью, содержащей взаимодействующее с подстилающей поверхностью основание 20 и взаимодействующую с кровлей выработки балку 24, поддерживаемую четырьмя гидравлическим опорами 28 (показаны только две из них), разнесенными в стороны попарно спереди и сзади для определения границ доступной полосы 30 движения. В месте 34 к балке 24 с возможностью поворота прикреплен щит 32, который присоединен к основанию 42 лемнискатными соединениями 40. На переднем конце щита 32 также расположен подпирающий плоскость забоя узел 48, содержащий контактную пластину 50, показанную в режиме поддерживания плоскости забоя, причем пластина 50 выдвигается из своего сложенного положения посредством гидравлических цилиндров 54 в положение, в котором она упирается в часть плоскости забоя. На фиг.1 штрихпунктирной линией показан подпирающий плоскость забоя узел в полностью выдвинутом положении.
Более конкретно, комбайн 12 содержит опору в виде удлиненной подвижной рамы 60 с башмаком 64 подкладного типа, который с возможностью перемещения поддерживается на бегунке 68, по существу, параллельно плоскости сплошного забоя. Отходящий вбок вращающийся барабан 70, который содержит множество прикрепленных к нему резцов 74, присоединен с возможностью поворота к концам рамы 60 соответствующим кронштейном 78. Работа комбайна 12 хорошо известна в горном деле и по сути не описывается подробно в данном документе. Однако специалист должен понимать, что комбайн 12 перемещается назад и вперед на бегунке 68 так, что резцы 74 на барабане 70 могут быть введены во взаимодействие с разрабатываемой плоскостью забоя с отделением от нее породы. По мере убыли плоскости забоя бегунок 68 и машину 12 продвигают к плоскости забоя для обеспечения возможности продолжения процесса разработки месторождения.
Как показано на фиг.5, башмак 64 подкладного типа сдержит средство регулировки угла атаки врубовой машины относительно разрабатываемой плоскости забоя в виде гидравлических цилиндров 80, обеспечивающих регулирование рабочих диапазонов машины, чтобы задать переменный шаг и возможность вращения для контроля горизонта. Более конкретно, башмак содержит опорную стойку Г-образной формы, прикрепленную в месте 82 с возможностью поворота вблизи ее средней точки к подвижной раме 60. На одном конце опорной стойки находится башмак 64, а на другом конце находится гидравлический цилиндр 80, присоединенный одним концом к подвижной раме 60, а другим концом - к опорной стойке башмака. Удлинение и втягивание гидравлического цилиндра 80 вызывает подъем или опускание подвижной рамы 60 относительно башмака 64.
Указанный регулируемый башмак 64 находится на задней части подвижной рамы 60 на расстоянии от плоскости 20 выемочной панели. Подъем и опускание подвижной рамы 60 относительно башмака 64 регулирует расположение врубовой машины 12 относительно плоскости 20 выемочной панели. Более конкретно, как показано на фиг.2, машина 12 должна быть ориентирована перпендикулярно плоскости 20 выемочной панели. Однако в некоторых случаях бегунок 68 может сместиться от плоскости 20, например, как показано на фиг.3. В этом случае приводят в действие гидравлический цилиндр 80 для возврата машины 12 к надлежащему размещению относительно плоскости выемочной панели.
В настоящее время оператору врубовой машины нелегко определить наличие ненадлежащего расположения машины относительно плоскости забоя. В данном изобретении предлагается средство, позволяющее оператору врубовой машины обнаруживать такое ненадлежащее расположение.
Более конкретно, врубовая машина 12 содержит выравнивающее средство, обеспечивающее определение относительного углового расположения между врубовой машиной и опорой 16 кровли выработки, которое, в свою очередь, связано с надлежащим расположением врубовой машины 12 относительно плоскости 20. Выравнивающее средство содержит источник 90 света в виде лазера, расположенный на врубовой машине 12 и направленный на щит 32. Выравнивающее средство также содержит направляющий элемент 94, расположенный на опоре 16 кровли над врубовой машиной 12, так что при требуемом расположении врубовой машиной 12 относительно опоры кровли 32 свет, испускаемый источником 90 света, попадает в заданное место относительно направляющего элемента 94. Предпочтительно заданное место находится на направляющем элементе, хотя в других вариантах выполнения (не показаны) оно может находиться на некотором расстоянии от направляющего элемента. Кроме того, в менее предпочтительных вариантах выполнения (не показаны) источник света может быть направлен на часть опоры кровли, а не на щит 32.
Когда врубовая машина 12 расположена неправильно относительно опоры 32 кровли, источник света 90 не будет попадать в заданное место относительно направляющего элемента 94, как показано на фиг.3. Когда оператор врубовой машины обнаруживает, что свет от источника 90 не попадает в заданное место относительно элемента 94, он регулирует наклон врубовой машины 12, используя гидравлические цилиндры 80, чтобы испускаемый источником 90 свет снова попадал в заданное место относительно элемента 94.
В предпочтительном варианте выполнения направляющий элемент 94, показанный схематически на фиг.1-4, является окрашенным куском ленты, приклеенным к щиту 32. Однако в других вариантах выполнения возможно использование любого видимого элемента на опоре 16 кровли.
Различные другие свойства данного изобретения изложены в последующей формуле изобретения.
Реферат
Изобретение относится к устройству и способу для управления действиями длиннозабойного угольного комбайна в сплошном забое с отслеживанием его расположения относительно плоскости выемочной панели угля. Технический результат заключается в увеличении производительности длиннозабойной разработки за счет надлежащего поддержания расположения плоскости врубовой машины относительно плоскости выемочной панели. Врубовая машина содержит источник света и направляющий элемент, расположенный на опоре кровли, для определения относительного углового расположения между врубовой машиной и опорой кровли. Источник света, выполненный в виде лазера, расположен на врубовой машине и направлен на опору кровли. Указанный направляющий элемент расположен на опоре кровли над врубовой машиной так, что когда врубовая машина расположена правильно относительно опоры кровли, свет, испускаемый источником света, попадает в заданное место относительно указанного направляющего элемента. Когда врубовая машина находится в неправильном расположении относительно опоры кровли, источник света не будет попадать в заданное место относительно направляющего элемента. Когда оператор врубовой машины обнаруживает, что свет от источника не попадает в заданное место относительно направляющего элемента, он регулирует наклон врубовой машины, используя гидравлические цилиндры, так чтобы испускаемый источником свет снова попадал в заданное место относительно направляющего элемента. 2 н. и 7 з.п. ф-лы, 5 ил.
Формула
опору для врубовой машины, предназначенную для размещения смежно с плоскостью забоя на подстилающей поверхности забоя,
врубовую машину, выполненную с возможностью перемещения вдоль плоскости забоя на указанной опоре,
опору кровли, расположенную над врубовой машиной и ее опорой, средство регулировки угла атаки врубовой машины относительно плоскости забоя,
средство определения относительного углового расположения между указанной врубовой машиной и указанной опорой кровли, содержащее источник света, расположенный на врубовой машине и направленный на указанную опору кровли, и
направляющий элемент, расположенный на указанной опоре кровли, так что когда угловое расположение между врубовой машиной и опорой кровли соответствует требуемому расположению, свет, испускаемый указанным источником света, попадает в заданное место относительно указанного направляющего элемента.
опору для врубовой машины, предназначенную для размещения смежно с плоскостью забоя на подстилающей поверхности забоя,
врубовую машину, выполненную с возможностью перемещения вдоль плоскости забоя на указанной опоре,
опору кровли, расположенную над врубовой машиной и ее опорой,
средство регулировки угла атаки врубовой машины относительно плоскости забоя,
средство определения относительного углового расположения между указанной врубовой машиной и указанной опорой кровли, содержащее источник света, расположенный на врубовой машине и направленный на указанную опору кровли, и
направляющий элемент, расположенный на указанной опоре кровли, так что когда угловое расположение между врубовой машиной и опорой кровли соответствует требуемому расположению, свет, испускаемый указанным источником света, попадает в заданное место относительно указанного направляющего элемента,
причем способ включает обнаружение того, что свет, испускаемый источником света, не попадает в заданное место относительно указанного направляющего элемента, и последующее регулирование наклона врубовой машины так, чтобы свет, испускаемый источником света, снова попадал в заданное место относительно указанного направляющего элемента.
Комментарии