Система и способ управления конвейером в системе горных разработок - RU2606732C2
Код документа: RU2606732C2
Чертежи















Описание
РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящая заявка ссылается на приоритет ранее поданной предварительной заявки США №61/510850, зарегистрированной 22 июля 2011 г., содержание которой настоящим полностью включается в настоящую заявку путем ссылки. Настоящая заявка также ссылается на приоритет ранее поданной предварительной заявки США №61/510839, зарегистрированной 22 июля 2011 г., содержание которой настоящим также включается полностью в настоящую заявку путем ссылки.
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
[0002] Настоящее изобретение относится к управлению конвейером, таким как скребковый забойный конвейер (armored face conveyor, AFC) или консольный перегружатель (beam stage loader, BSL).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Системы горных разработок длинными забоями содержат, наряду с прочим, AFC или BSL для транспортировки добываемого материала (например, угля) из области, где он добывается, в область обработки (например, дробления, хранения и т.д.). Конвейеры AFC содержат, например, первую звездочку и вторую звездочку, вокруг которых предусматривается цепь. Цепь приводится в движение одним или более двигателями (например, двигателем в основном штреке, двигателем во вспомогательном штреке и т.д.), и движение цепи вокруг звездочек побуждает конвейер транспортировать добытый материал.
[0004] В обычных конвейерах AFC, которые содержат выдвижную раму концевой станции, используют способы предварительного натяжения для увеличения натяжения цепи вокруг звездочек и предотвращения состояния ослабленной цепи или состояния нулевого натяжения. Способы предварительного натяжения включают, например, использование гидравлического цилиндра для отведения первой звездочки от второй звездочки. Затем для поддержания высокого предварительного натяжения цепи рядом со звездочкой вручную устанавливаются прокладки или распорки.
[0005] Предварительное натяжение цепи, как описано выше, имеет целый ряд недостатков. Например, получение и поддержание высокого предварительного натяжения в цепи (например, 30-40 тонн) увеличивает напряжение и износ цепи, звездочек и т.д. Кроме того, поскольку добытый материал загружается на AFC, напряженное состояние в цепи продолжает расти. Таким образом, цепь, которая уже испытывает напряжение в результате высокого предварительного натяжения, подвергается дальнейшему возросшему напряжению по мере того, как добытый материал загружается на конвейер.
[0006] Таким образом, изобретение, в общем, предлагает, среди прочего, системы и способы управления конвейером AFC для автоматического управления натяжением цепи путем изменения положения звездочки с помощью гидравлического цилиндра. Изобретение может быть использовано с, например, AFC, в котором первый конец AFC является фиксированным, а второй конец AFC является выдвижным. Для таких AFC натяжение цепи изменяется по длине конвейера, и следует избегать состояний нулевого натяжения или ослабленной цепи для обеспечения максимальной надежности AFC. По существу, одна конструкция системы содержит AFC, имеющий выдвижную раму концевой станции, первую звездочку, вторую звездочку, один или более гидравлических цилиндров, одну или более цепей и контроллер. По меньшей мере одна из звездочек, первая или вторая, имеет приводной механизм (например, двигатель и контроллер двигателя). Приводной механизм вращает соответствующие первую звездочку и вторую звездочку для транспортирования добытого материала из первого местоположения во второе местоположение, а котроллер использует измеренную электрическую характеристику, связанную с AFC, для автоматического управления положением одного или более гидравлических цилиндров или звездочек.
[0007] Например, контроллер использует сохраненную зависимость между электрической характеристикой одного или более двигателей и положением одного или более гидравлических цилиндров, положением первой или второй звездочки, натяжением одной или более цепей, количеством добытого материала, погруженного на конвейер и т.п. На основе электрической характеристики осуществляется управление одним или более гидравлическими цилиндрами для увеличения или уменьшения расстояния между первой звездочкой и второй звездочкой для учета растягивания одной или более цепей, которое происходит при погрузке добытого материала на конвейер. Хотя предварительное натяжение все также используется, величина требуемого предварительного натяжения может быть уменьшена с примерно 30-40 тонн до примерно менее 10 тонн (например, 5-6 тонн) за счет динамического изменения положения, например, одного или более гидравлических цилиндров на основе электрической характеристики. Сокращение требуемой величины предварительного натяжения уменьшает значение напряжения и износа компонентов системы. В другой конструкции контроллер принимает прямое измерение натяжения одной или более цепей от датчика натяжения цепи. На основе измеренного натяжения цепи осуществляется управление одним или более гидравлическими цилиндрами для увеличения или уменьшения расстояния между первой звездочкой и второй звездочкой для учета растягивания одной или более цепей.
[0008] В одном варианте осуществления предлагается способ управления положением гидравлического цилиндра в скребковом забойном конвейере. Скребковый забойный конвейер содержит звездочку, цепь, гидравлический цилиндр и контроллер. Способ, в общем, может включать измерение электрической характеристики, соответствующей забойному скребковому конвейеру, определение крутящего момента, соответствующего звездочке, на основе электрической характеристики, определение натяжения, соответствующего цепи, на основе крутящего момента, определение величины растяжения цепи на основе натяжения и изменение положения гидравлического цилиндра на основе определенной величины растяжения цепи.
[0009] В другом варианте осуществления предлагается способ управления положением гидравлического цилиндра в скребковом забойном конвейере. Скребковый забойный конвейер содержит звездочку, цепь, датчик натяжения цепи, гидравлический цилиндр и контроллер. Способ включает измерение или считывание натяжения цепи с помощью датчика натяжения цепи, генерирование сигнала, соответствующего измеренному натяжению цепи, преобразование сигнала, соответствующего измеренному натяжению цепи, определение величины растяжения цепи на основе преобразованного сигнала и изменение положения гидравлического цилиндра на основе определенной величины растяжения цепи.
[0010] В одном варианте осуществления изобретения предлагается конвейер для системы горных разработок. Конвейер содержит раму, первую звездочку, имеющую первое положение, вторую звездочку, имеющую второе положение, цепь, связанную с первой звездочкой и второй звездочкой, датчик, выполненный с возможностью генерирования сигнала, соответствующего электрической характеристике конвейера, приводной механизм, соединенный по меньшей мере с одной из звездочек, первой или второй, гидравлический цилиндр и контроллер. Рама имеет фиксированный первый конец и выдвижной второй конец. Первое положение находится на расстоянии от второго положения. Приводной механизм выполнен с возможностью приведения в движение по меньшей мере одной из звездочек, первой или второй. Контроллер выполнен с возможностью получения сигнала от датчика, определения величины растяжения цепи в цепи на основе полученного сигнала, определения положения гидравлического цилиндра на основе определенной величины растяжения цепи и генерирования сигнала управления для управления гидравлическим цилиндром в соответствии с этим положением гидравлического цилиндра.
[0011] В другом варианте осуществления изобретения предлагается способ управления натяжением цепи для конвейера в системе горных разработок. Способ включает в себя анализ сигнала, соответствующего натяжению цепи, определение натяжения цепи на основе анализируемого сигнала, определение удлинения цепи на основе определенного натяжения цепи, определение положения гидравлического цилиндра на основе определенного удлинения цепи и управление гидравлическим цилиндром в соответствии с этим положением.
[0012] В другом варианте осуществления изобретения предлагается система горных разработок, которая содержит конвейер, первый датчик, второй датчик, гидравлический цилиндр и контроллер. Первый датчик предназначен для измерения натяжения цепи и выполнен с возможностью генерирования первого сигнала, указывающего натяжение цепи. Второй датчик предназначен для измерения электрической характеристики конвейера и выполнен с возможностью генерирования второго сигнала, указывающего натяжение цепи, на основе электрической характеристики конвейера. Контроллер выполнен с возможностью приема первого сигнала от первого датчика, приема второго первого и второго сигналов и управления положением гидравлического цилиндра на основе определенного натяжения цепи.
[0013] Независимые аспекты изобретения станут очевидными при рассмотрении подробного описания и сопроводительных чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0014] На фиг.1 показана концевая рама цепного конвейера.
[0015] На фиг.2 показан контроллер для AFC в соответствии с вариантом осуществления изобретения.
[0016] На фиг.3 представлена схема, иллюстрирующая, каким образом натяжение цепи меняется по длине AFC.
[0017] На фиг.4 представлен график, иллюстрирующий зависимость между положением выемочного комбайна и количеством добытого материала, погруженного на AFC.
[0018] На фиг.5 представлен график, иллюстрирующий зависимость между количеством добытого материала, погруженного на AFC, и положением гидравлического цилиндра.
[0019] На фиг.6 представлен график, иллюстрирующий варианты натяжения цепи в зависимости от различных местоположений цепи.
[0020] На фиг.7 представлен график, иллюстрирующий мощность двигателя, соответствующую двигателю AFC в основном штреке и двигателю AFC во вспомогательном штреке.
[0021] На фиг.8 показан процесс управления положением гидравлического цилиндра.
[0022] На фиг.9 показан другой процесс управления положением гидравлического цилиндра.
[0023] На фиг.10 приведен перспективный вид концевой рамы цепного конвейера.
[0024] На фиг.11 представлено увеличенное изображение концевой рамы цепного конвейера, изображенной на фиг.10.
[0025] На фиг.12 представлен перспективный вид узла датчика.
[0026] На фиг.13 показано изображение узла датчика, представленного на фиг.12.
[0027] На фиг.14 представлен вид в разрезе узла датчика, показанного на фиг.12, взятый вдоль линии 15-15.
[0028] На фиг.15 представлен увеличенный вид в разрезе узла датчика, показанного на фиг.14.
[0029] На фиг.16 представлен увеличенный вид в разрезе узла датчика, показанного на фиг.14.
[0030] На фиг.17 представлено перспективное изображение с пространственным разделением деталей пружинного механизма.
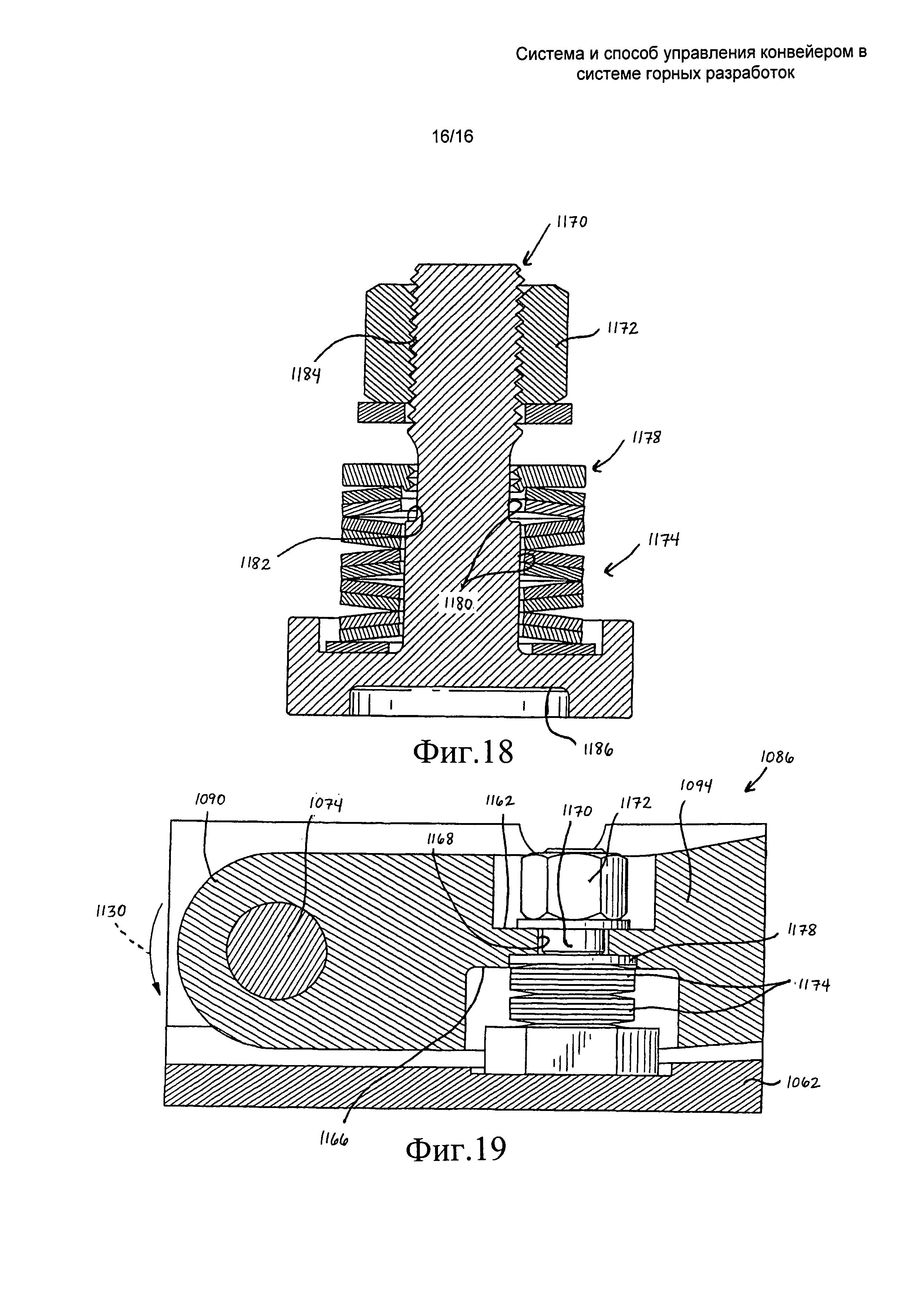
[0031] На фиг.18 показан вид в разрезе пружинного механизма, показанного на фиг.17.
[0032] На фиг.19 представлен увеличенный вид в разрезе узла датчика.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0033] Прежде чем независимые варианты осуществления изобретения будут подробно описаны, следует понимать, что изобретение не ограничивается в своем применении деталями конструкции и организацией компонентов, описанных в последующем описании или проиллюстрированных на последующих чертежах. Изобретение может быть представлено другими независимыми вариантами и может быть осуществлено на практике и выполнено различными способами.
[0034] Варианты осуществления и конструкции изобретения, описанные в настоящей заявке, относятся к транспортной системе на основе цепного конвейера для разработки длинными забоями и к управлению ею. Транспортная система на основе цепного конвейера для разработки длинными забоями содержит, например, скребковые забойные конвейеры ("AFC") или консольные перегружатели ("BSL"). В описательных целях изобретение описывается в настоящей заявке в отношении вариантов, которые содержат конвейеры AFC. Конвейеры AFC содержат, например, раму концевой станции, первую звездочку, вторую звездочку, одну или более цепей, один или более двигателей, один или более гидравлических цилиндров, контроллер и пользовательский интерфейс. Контроллер выполнен с возможностью приема одного или более сигналов, соответствующих электрической характеристике AFC, и автоматического управления положением первой звездочки или второй звездочки на основе электрической характеристики. Электрической характеристикой является, например, напряжение, ток, коэффициент мощности, скорость вращения двигателя, крутящий момент двигателя, входная мощность, выходная мощность и т.д. В некоторых вариантах осуществления электрическая характеристика связана с одним или более двигателями (например, двигателем в основном штреке или двигателем во вспомогательном штреке), которые используются для приведения во вращение первой и второй звездочки. Дополнительно или альтернативно, контроллер выполнен с возможностью приема одного или более сигналов натяжения цепи, соответствующих измеренному натяжению цепи, и автоматического управления положением первой звездочки или второй звездочки на основе сигналов натяжения цепи. На основе электрической характеристики или сигналов натяжения цепи контроллер определяет необходимое удлинение рамы концевой станции, необходимое положение одного или более гидравлических цилиндров, необходимое положение первой звездочки, необходимое положение второй звездочки, количество добытого материала, погруженного на AFC, одно или более натяжений, соответствующих одной или более цепям, одно или более требуемых натяжений, соответствующих одной или более цепям, положение выемочного комбайна и т.д. Например, после того, как контроллер определил необходимое положение одного или более гидравлических цилиндров, он управляет одним или более гидравлическими цилиндрами в отношении необходимого положения для перемещения первой звездочки. В некоторых вариантах осуществления определение положения одного или более гидравлических цилиндров производится на основе зависимости между электрической характеристикой и крутящим моментом звездочки, натяжением цепи, количеством добытого материала, погруженного на конвейер и т.д.
[0035] На фиг.1 представлена рама 100 концевой станции, которая содержит, среди прочего, фиксированную часть рамы, выдвижную часть рамы и один или более гидравлических цилиндров. Рама 100 концевой станции является частью системы горных разработок длинными забоями, в которую также входит, например, выемочный комбайн. В некоторых конструкциях положение выдвижной части рамы определяется с помощью датчика линейного перемещения, выполненного с возможностью измерения положения выдвижной части рамы на протяжении полной амплитуды ее движений. Положение выдвижной части рамы может быть изменено (например, увеличено или уменьшено) для соответствующего управления положением одного или более гидравлическими цилиндрами, первой звездочки, второй звездочки и т.д.
[0036] На фиг.2 изображен контроллер 200, связанный с рамой 100 концевой станции. Контроллер 200 соединен или связан с различными дополнительными модулями или компонентами, такими как модуль 205 пользовательского интерфейса, один или более индикаторов 210, модуль 215 питания, один или более датчиков 220, модуль 225 параметров двигателя и один или более гидравлических цилиндров 230. Один или более датчиков 220 представляют собой, например, датчики мощности в пределах AFC, выполненные с возможностью измерения или считывания электрической характеристики (например, тока, напряжения, коэффициента мощности, крутящего момента, скорости вращения, входной мощности, выходной мощности и т.д.), датчики натяжения цепи, выполненные с возможностью непосредственного измерения или считывания натяжения цепи и т.д. Применение датчиков, которые во многих случаях входят в состав AFC, сокращает или устраняет необходимость в специальных датчиках. В некоторых конструкциях датчики мощности и датчики натяжения цепи используются совместно (например, один датчик работает в качестве резервной системы для другого). Кроме того, датчики мощности располагают за пределами неблагоприятных областей, в которых датчики могут выйти из строя или могут подлежать постоянной замене. Контроллер 200 включает в себя комбинации программного и аппаратного обеспечения, которые функционируют, среди прочего, для управления конвейером AFC, управления положением рамы 100 концевой станции, активации одного или более индикаторов 210 (например, светодиодные индикаторы (LED) или жидкокристаллический индикатор (LCD)), и т.д. Контроллер 200 содержит, среди прочего, процессор 235 (например, микропроцессор, микроконтроллер или другое подходящее программное устройство), память 240 и шину. Шина соединяет различные компоненты контроллера 200, включая память 240, с процессором 235. В некоторых конструкциях контроллер 200 также соединяется с модулем связи, который выполнен с возможностью организации связи по одной или более сетям.
[0037] Память 240 включает в себя, например, постоянное запоминающее устройство (ПЗУ, read-only memory, ROM), запоминающее устройство с произвольной выборкой (ЗУПВ, random access memory, RAM), электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ, electrically erasable programmable read-only memory, EEPROM), флэш-память, жесткий диск, SD-карту или любое другое подходящее магнитное, оптическое, физическое или электронное устройство памяти. Процессор 235 соединен с памятью 240 и осуществляет программное обеспечение, которое может храниться в ЗУПВ (например, во время выполнения), ПЗУ (например, в общем на постоянной основе) или другом не изменяемом во времени машиночитаемом носителе, таком как другое устройство памяти или диск. Дополнительно или альтернативно память 240 включается в состав процессора 235. Контроллер 200 также содержит систему 245 ввода/вывода ("I/O"), которая включает в себя программы обмена информацией между компонентами в пределах контроллера 200 и другими компонентами AFC. Программное обеспечение, входящее в состав варианта выполнения AFC, хранится в памяти 240 контроллера 200. Программное обеспечение включает в себя, например, встроенные программы, одно или более приложений, программные данные, один или более программных модулей и другие исполняемые команды. Контроллер 200 выполнен с возможностью извлечения из памяти и выполнения, среди прочего, команд, относящихся к процессам и способам управления, описанным в настоящей заявке. В других конструкциях контроллер 200 содержит дополнительные компоненты, меньшее количество компонентов или другие компоненты. Модуль 215 питания обеспечивает номинальным напряжением переменного (АС) или постоянного (DC) тока конвейер AFC, а также компоненты и модули в пределах AFC. Например, модуль 215 питания получает питание в системе утвержденного рудничного энергоснабжения.
[0038] Модуль 225 параметров двигателя соединен или связан с одним или более двигателями или приводными механизмами, которые соединены с первой звездочкой и/или второй звездочкой. Модуль 225 параметров двигателя подключается, например, к одному или более распределительным устройствам или включается в их состав. Модуль 225 параметров двигателя выполнен с возможностью получения сигналов, соответствующих одному или более параметрам (например, току, напряжению, коэффициенту мощности, крутящему моменту, скорости вращения, входной мощности, выходной мощности и т.д.), одного или более двигателей. В некоторых вариантах осуществления изобретения модуль 225 параметров двигателя принимает сигналы, относящиеся к параметрам двигателя. В других вариантах модуль 225 параметров двигателя содержит один или более датчиков 220 или подключается к одному или более датчикам для считывания параметров двигателя. Двигатели управляются с помощью сигналов управления, полученных от контроллера 200 или другого соответствующего контроллера, такого как распределительное устройство. Один или более двигателей также связаны с редукторами для уменьшения скорости вращения двигателя до скорости вращения, подходящей для звездочек и конвейера. В некоторых вариантах осуществления контроллер 200 выполнен с возможностью управления двигателями и AFC автономно, используя множество датчиков и одну или более сохраненных программ или модулей. В других вариантах осуществления контроллер 200 выполнен с возможностью управления двигателями и AFC на основе комбинации входных данных, вводимых вручную, и автоматического управления. Один или более гидравлических цилиндров 230 также принимают сигналы управления от контроллера 200 и выборочно удлиняют раму концевой станции (например, изменяют положение одного или более гидравлических цилиндров, первой звездочки, второй звездочки и т.д.) на основе сигналов управления от контроллера 200. Контроллер 200 также осуществляет контроль одного или более двигателей и одного или более гидравлических цилиндров 230 для определения соответствующих характеристик. Например, контроллер 200 может отслеживать или считывать электрические характеристики одного или более двигателей, положение одного или более гидравлических цилиндров 230 (например, выдвижение одного или более гидравлических цилиндров) и т.д. Хотя иллюстрируется один контроллер, в других конструкциях контроллер 200 может быть разделен на множество контроллеров. Например, контроллер 200 может быть разделен на объединенный блок управления (consolidated control unit, CCU), программируемый блок управления (programmable control unit, PCU), один или более редукторов и т.д. Блок CCU может быть размещен во взрывозащищенном корпусе и обеспечивать управление конвейерной системой разработок длинными забоями. Блок PCU является, по существу, системой безопасности, которая может быть связана интерфейсом с CCU для, среди прочего, остановки, отключения и т.д. работы конвейера. Один или более редукторов выполнены с возможностью управления пуском и остановкой конвейера, обеспечения защиты для одного или более двигателей, считывания или отслеживания одного или более параметров (например, электрических параметров) одного или более двигателей и т.д. Сигналы от одного или более редукторов, соответствующие одному или более параметрам двигателя, могут затем быть направлены, например, в блок CCU, контроллер 200, модуль 225 параметров двигателя и т.д.
[0039] Модуль 205 пользовательского интерфейса используют для управления или контроля AFC или системы горных разработок длинными забоями. Например, модуль 205 пользовательского интерфейса функционально связан с контроллером 200 для управления скоростью конвейера, скоростью одного или более двигателей и т.д. Модуль 205 пользовательского интерфейса может содержать комбинацию цифровых и аналоговых входных или выходных устройств, необходимых для достижения желаемого уровня управления и контроля для AFC. Например, модуль 205 пользовательского интерфейса может включать в себя дисплей и устройства ввода, такие как сенсорный дисплей, одну или более ручек, циферблатов, переключателей, кнопок и т.д. Дисплеем является, например, жидкокристаллический дисплей (ЖК-дисплей, LCD), дисплей на светодиодах (LED), дисплей на органических светодиодах (OLED), электролюминесцентный дисплей (ELD), дисплей с электронной эмиссией за счет поверхностной проводимости (surface-conduction electron-emitter display, SED), дисплей полевого излучения (field emission display, FED), дисплей на тонкопленочных транзисторах (thin-film transistor, TFT) и т.д. В других конструкциях дисплеем является ЖК-дисплей с суперактивной матрицей на органических светодиодах (super active-matrix OLED, AMOLED). Модуль 205 пользовательского интерфейса может также быть выполнен с возможностью отображения условий или данных, связанных с AFC в режиме реального времени или по существу в режиме реального времени. Например, модуль 205 пользовательского интерфейса выполнен с возможностью отображения измеренных электрических характеристик конвейера AFC, состояния AFC, натяжений цепи, состояний отказа (например, ослабленной цепи, цепи с нулевым натяжением и т.д.), количества добытого материала на конвейере и т.д. В некоторых вариантах осуществления управление модулем 205 пользовательского интерфейса осуществляется в сочетании с одним или более индикаторами 210 (например, светодиодами) для получения визуальной индикации состояний или условий AFC.
[0040] В некоторых вариантах осуществления изобретения информация и данные, связанные с работой AFC, посылаются, переносятся или передаются на удаленное или мобильное устройство для дистанционного мониторинга, дистанционного управления, регистрации данных и т.д. Удаленным или мобильным устройством является, например, персональный компьютер, ноутбук, мобильный телефон, планшетный компьютер, персональный цифровой помощник (personal digital assistant, PDA), электронная книга (е-reader), сервер, база данных и т.д. В некоторых вариантах выполнения данные передаются через беспроводную локальную сеть (local area network, LAN), районную сеть (neighborhood area network, NAN), домашнюю сеть (home area network, HAN) или персональную сеть (personal area network, PAN), используя любой из множества протоколов, таких как Wi-Fi, Bluetooth, ZigBee и др. Дополнительно или альтернативно данные передаются к удаленному или мобильному устройству через глобальную сеть (wide area network, WAN) (например, сеть на основе TCP/IP (Transmission Control Protocol/Internet Protocol, протокол управления передачей/протокол Интернет), сеть на основе глобальной системы мобильной связи (Global System for Mobile Communications, GSM), сеть пакетной передачи данных по радиоканалам (General Packet Radio Service, GPRS), сеть множественного доступа с кодовым разделением каналов (Code Division Multiple Access, CDMA), сеть эволюционировавшей оптимизированной передачи данных (Evolution-Data Optimized, EV-DO), сеть на основе перспективной технологии для развития стандарта GSM (Enhanced Data Rates for GSM Evolution, EDGE), сеть 3GSM, сеть улучшенной цифровой беспроводной связи (Digital Enhanced Cordless Telecommunications, DECT), сеть цифровой усовершенствованной системы мобильной связи (Digital AMPS, Advanced Mobile Phone Service, IS-136/TDMA" (Time Division Multiple Access, множественный доступ с временным уплотнением)), сеть интегрированной системы мобильной связи (Integrated Digital Enhanced Network, iDEN), сеть цифровой усовершенствованной системы мобильной связи (Digital Advanced Mobile Phone System, D-AMPS) и т.д.
[0041] Удаленное или мобильное устройство включает в себя, например, отдельный контроллер, модуль пользовательского интерфейса, дисплей, модуль питания и модуль связи, который действует аналогичным образом по отношению к соответствующим компонентам AFC, описанным выше. Удаленное или мобильное устройство также включает в себя, например, комбинации программного обеспечения и аппаратного обеспечения, которые пригодны, наряду с прочим, для управления работой AFC, контроля информации, которая представлена на дисплее и т.д. Информация, полученная от AFC, может быть принята через модуль связи, который содержит одну или более антенн, одну или более сетевых интерфейсных карт (network interface cards, NIC) и т.д. для связи посредством одной или более сетей, описанных выше.
[0042] Как указывалось выше, в некоторых вариантах осуществления контроллер 200 выполнен с возможностью предотвращения состояния цепи с нулевым натяжением или ослабленной цепи в одной или более цепях с помощью электрической характеристики, относящейся к AFC, для автоматического управления положением одного или более гидравлических цилиндров. Контроллер 200 также выполнен с возможностью приема сигналов от одного или более датчиков 220, связанных с одним или более двигателями, одним или более гидравлическими цилиндрами 230, одной или более цепями или другими компонентами AFC. Сигналы от датчиков 220 относятся, например, к напряжениям одной или более цепей или напряжению, току, коэффициенту мощности, скорости вращения двигателя, крутящему моменту двигателя, входной мощности, выходной мощности и т.д. одного или более двигателей. Контроллер 200 затем обрабатывает и анализирует сигналы для определения необходимого положения гидравлического цилиндра, которое базируется на величине растяжения цепи. Величина растяжения цепи зависит, среди прочего, от количества добытого материала, погруженного на конвейер. В некоторых исполнениях общая электрическая мощность AFC используется для управления положением гидравлического цилиндра. В других исполнениях мощность одного из одного или более двигателей (например, двигателя в основном штреке или двигателя во вспомогательном штреке) используется для управления положением гидравлического цилиндра.
[0043] В некоторых исполнениях контроллер 200 управляет положением гидравлического цилиндра на основе одной или более зависимостей между электрической характеристикой (например, мощностью) конвейера AFC и положением одного или более гидравлических цилиндров 230, положением первой или второй звездочки, натяжением одной или более цепей, количеством добытого материала, погруженного на конвейер, положением выемочного комбайна и т.д. В зависимости от электрической характеристики осуществляется управление одним или более гидравлическими цилиндрами для увеличения или уменьшения расстояния между первой звездочкой и второй звездочкой для учета растягивания одной или более цепей, которое происходит, когда добытый материал погружается на конвейер. С помощью автоматического управления положением гидравлического цилиндра на основе электрической характеристики в процессе работы AFC величина необходимого предварительного натяжения может быть существенно уменьшена, что сокращает величину напряжения и износа одной или более цепей, звездочек и т.д. В других вариантах осуществления контроллер 200 управляет положением гидравлического цилиндра аналогичным образом на основе измеренных натяжений одной или более цепей. Кроме того, автоматическое управление положением гидравлического цилиндра, как описано, позволяет контроллеру 200 реализовать различные алгоритмы, улучшающие работу AFC. Например, контроллер 200 может выключить AFC в случае снижения натяжения цепи, снижения гидравлического давления, незапланированного изменения положения гидравлического цилиндра, когда предполагается, что положение гидравлического цилиндра было изменено, но при этом никаких изменений обнаружено не было, и т.д.
[0044] В некоторых вариантах осуществления измеряется как натяжение цепи, так и электрическая характеристика. Например, натяжение цепи непосредственно измеряется с помощью первого датчика или датчика натяжения цепи, а электрическая характеристика измеряется с помощью второго датчика, такого так датчик мощности. В таком варианте осуществления и первый сигнал, сформированный первым датчиком, и второй сигнал, сформированный вторым датчиком, принимаются контроллером 200, при этом один сигнал является резервным для другого сигнала. Например, когда первый сигнал не принимается, контроллер 200 использует второй сигнал для определения натяжения цепи. И наоборот, когда не принимается второй сигнал, контроллер 200 использует первый сигнал для определения натяжения цепи. В некоторых вариантах осуществления первый сигнал и второй сигнал могут сравниваться друг с другом для установления, не находится ли один из датчиков, первый или второй, в неисправном состоянии. В случае неисправности контроллер 200 может не принимать сигнал от одного из датчиков, первого или второго (или обоих). Например, если первый датчик является первичным датчиком, но контроллер 200 не принимает сигнал от первого датчика (или сигнал искаженный), контроллер использует сигнал от второго датчика для определения натяжения цепи. Или же, если второй датчик является первичным датчиком, но контроллер 200 не принимает сигнал от второго датчика (или сигнал является искаженным), контроллер 200 использует сигнал от первого датчика для определения натяжения цепи. В некоторых вариантах осуществления как первый, так и второй сигналы используются для определения натяжения цепи.
[0045] На фиг.3-7 представлены различные зависимости, связанные с работой AFC или системы горных разработок длинными забоями, на основе тестовых данных. Хотя один или более графиков, показанных на фиг.4-7, могут быть объединены на одном чертеже, графики показаны отдельно в иллюстративных целях. По существу, один или более графиков могут показывать связь между, например, добытым материалом, погруженным на конвейер, и положением гидравлического цилиндра, но могут быть показаны по отношению к другой характеристике системы горных разработок длинным забоями (например, положению выемочного комбайна). Такие отношения являются иллюстрацией различных соответствий и зависимостей между описанными характеристиками систем горных разработок длинными забоями. Кроме того, каждый из графиков показывает изменение во времени (например, минутах) вдоль оси абсцисс в системе координат. Одинаковое представление времени для всех графиков позволяет более легко различать зависимости между характеристиками и компонентами системы горных разработок длинными забоями.
[0046] На фиг.3 показан конвейер 300, который содержит первую звездочку 305 (например, звездочку концевой станции во вспомогательном штреке) и вторую звездочку 310 (например, звездочку разгрузочной станции в основном штреке). Первая и вторая звездочки 305 и 310 находятся на расстоянии друг от друга и соединяются цепью 315, которая оборачивается вокруг как первой звездочки 305, так и второй звездочки 310. Натяжение цепи 315 представлено линией 320. Чем дальше линия 320 от цепи 315, тем больше натяжение в цепи 315. Как показано на фиг.3, натяжение изменяется по всей длине цепи 315 и является самым большим в нижней части 325 первой звездочки 305 (то есть звездочки во вспомогательном штреке) и верхней части 330 второй звездочки 310 (то есть звездочки в основном штреке). Натяжения, относящиеся к конвейеру 300, далее описываются и иллюстрируются графически на фиг.6.
[0047] На фиг.4 представлен график 400, который показывает зависимость между положением выемочного комбайна (то есть выемочного комбайна системы горных разработок длинными забоями) и количеством добытого материала, погруженного на AFC (то есть в тоннах на метр). Положение комбайна описывается в виде процента (%) от поверхности стены. Например, если комбайн расположен на самом дальнем конце системы горных разработок длинными забоями, положение комбайна составляет 100% (то есть в отношении к полному диапазону движения комбайна вдоль груди забоя). По мере увеличения значения положения комбайна количество добытого материала, который погружается на AFC, также возрастает по отношению к положению комбайна.
[0048] На фиг.5 представлен график 500 зависимости между количеством добытого материала, погруженного на конвейер 300 (то есть в т/м), и положением гидравлического цилиндра (то есть в метрах). Зависимость, показанная на графике 500, представлена по отношению к положению комбайна, ранее проиллюстрированному и описанному со ссылкой на фиг.4. По мере увеличения значения положения комбайна количество добытого материала, погруженного на конвейер 300, соответственно возрастает. Увеличение количества добытого материала увеличивает величину растяжения в цепи 315. Так как цепь растягивается, необходимо переместить звездочку для устранения ослабленного состояния, вызванного растяжением цепи, и для обеспечения надлежащего функционирования и надежности AFC.
[0049] На фиг.6 представлен график 600 натяжений (то есть в тоннах) в различных местоположениях цепи 315. Например, график 600 представляет натяжение в основном штреке у кровли, натяжение во вспомогательном штреке у кровли, натяжение в основном штреке у подошвы и натяжение во вспомогательном штреке у подошвы. Натяжения приведены в тоннах и также связаны с положением выемочного комбайна, количеством добытого материала, погруженного на конвейер 300, и положением гидравлического цилиндра в сопоставлении с предыдущими фиг.4 и 5. В сравнении с фиг.4 и 5, поскольку количество добытого материала, погруженного на конвейер 300, возрастает, увеличивается и натяжение в цепи 315. Подобным образом, по мере того, как величина положения комбайна увеличивается, натяжение в цепи возрастает. Точно так же, поскольку натяжение растет, гидравлический цилиндр раздвигается для устранения ослабленного состояния, связанного с растяжением цепи 315.
[0050] На фиг.7 представлен график 700 мощности двигателя (то есть в киловаттах, кВт) для каждого из одного или более двигателей (например, двигателя во вспомогательном штреке, связанного с первой звездочкой 305, и двигателя в основном штреке, связанного со второй звездочкой 310). Благодаря точности распределения мощности между двумя двигателями различия между мощностями, используемыми каждым двигателем, практически неразличимы. Как видно из приведенных выше графиков 400, 500 и 600, мощность двигателей в основном штреке и вспомогательном штреке связана с положением выемочного комбайна, натяжением цепи, количеством добытого материала, погруженного на конвейер 300, и положением гидравлического цилиндра. По существу, контроллер 200 может использовать эти зависимости для управления работой AFC на основе мощности двигателя, другой электрической характеристики AFC, измеренного натяжения цепи и т.д. Например, зависимости между одной или более электрическими характеристиками двигателей в основном штреке и вспомогательном штреке сохраняются в памяти (например, памяти 240). Зависимости могут быть запомнены в виде одной или более функций, одной или более таблиц соответствий (look up tables, LUT), или ряда пороговых значений, с которыми может производиться сравнение мощности двигателя или другой характеристики AFC.
[0051] В некоторых вариантах осуществления значение электрической характеристики используется для управления положением гидравлического цилиндра и, значит, натяжением цепи 315 (например, натяжением у кровли вспомогательного штрека). Положение гидравлического цилиндра зависит (например, пропорционально) от разницы между значением электрической характеристики и соответствующим значением электрической характеристики без нагрузки. Разница между измеренным значением электрической характеристики и значением электрической характеристики без нагрузки может быть затем использована для определения крутящего момента, соответствующего одной или более из первой звездочки 305 и второй звездочки 310. Крутящий момент звездочки используется в сочетании с известной жесткостью цепи 315 и характерным растягиванием цепи 315 для определения расстояния, на которое гидравлический цилиндр должен быть выдвинут. Положение гидравлического цилиндра (например, выдвижение гидравлического цилиндра) затем изменяется для учета растяжения в цепи 315. Как описано выше, изменение положения гидравлического цилиндра изменяет относительные положения первой звездочки 305 и второй звездочки 310.
[0052] В конструкциях, которые содержат датчик натяжения цепи, сигнал натяжения цепи, сформированный датчиком натяжения цепи, может быть использован для управления положением гидравлического цилиндра. Датчик натяжения цепи выполнен с возможностью непосредственного измерения натяжения одной или более цепей. Пример системы, содержащей датчик натяжения цепи, описан и проиллюстрирован в Приложении А. Сигналом натяжения цепи является, например, низковольтный сигнал, который показывает величину натяжения, соответствующую одной или более цепям. Контроллер 200 принимает сигнал натяжения цепи. Преобразователь сигнала или модуль преобразования сигнала в контроллере 200 выполнен с возможностью анализа и/или формирования низковольтного сигнала натяжения цепи путем идентификации и отбора одного или более пиков сигнала, усреднения отобранных пиков сигнала и создания преобразованного сигнала, показывающего динамическое натяжение одной или более цепей (например, в единицах тонны-на-цепь). Контроллер также выполнен с возможностью отображения динамического натяжения пользователю, отображения диагностики датчика натяжения цепи пользователю, калибровки датчика натяжения цепи и т.д. Измеренное натяжение цепи (например, преобразованный сигнал, показывающий динамическое натяжение одной или более цепей) может затем быть использовано в сочетании с известной жесткостью цепи 315 и характерным растяжением цепи 315 для определения расстояния, на которое должен быть выдвинут гидравлический цилиндр. Положение гидравлического цилиндра (например, выдвижение гидравлического цилиндра) затем изменяется для учета растяжения в цепи 315. Как описано выше, изменение положения гидравлического цилиндра изменяет относительные положения первой звездочки 305 и второй звездочки 310.
[0053] В вариантах осуществления изобретения с использованием LUT (таблицы соответствий), значения положений цилиндра, положений звездочки, растяжений цепи и т.д. сохраняются в памяти, соответствуя множеству значений электрической характеристики или измеренным значениям натяжения цепи. В некоторых исполнениях используются 8-разрядные числа (то есть 256 значений) или 16-разрядные числа (то есть 65536 значений) для идентификации положения звездочки, натяжения цепи или положения цилиндра, что соответствует значению электрической характеристики или значению измеренного натяжение цепи. Значение электрической характеристики или значение натяжения цепи используется в качестве входного значения, которое сравнивается со значениями, хранящимися в LUT. Элемент LUT, который соответствует входному значению, затем извлекается контроллером 200, и положение гидравлического цилиндра, положение звездочки и т.д. соответственно корректируются. В вариантах осуществления изобретения, в которых используются одна или более функций (например, хранящихся в памяти 240), значение электрической характеристики или значение натяжения цепи используется в качестве входного значения для одной или более функций таким образом, что контроллер 200 может вычислить соответствующее положение цилиндра, положение звездочки и т.д. Такой метод вычисления может обеспечить более точное управление положением гидравлического цилиндра, чем с использованием LUT. В вариантах осуществления изобретения, в которых используется множество пороговых значений, значение электрической характеристики или значение натяжения цепи сравниваются последовательно с рядом пороговых значений. Пороговые значения соответствуют положению гидравлического цилиндра, натяжению цепи, положению звездочки и т.д. В некоторых исполнениях изобретения сравнения с пороговыми значениями применяются, когда приемлемо грубое управление положением гидравлического цилиндра, натяжением цепи, положением звездочки и т.д.
[0054] На фиг.8 представлен процесс 800 управления AFC. На шаге 805 определяется значение электрической характеристики (например, измеренной, считанной, вычисленной и т.д.). Как описано выше, электрической характеристикой является, например, напряжение, ток, коэффициент мощности, скорость вращения двигателя, крутящий момент двигателя, входная мощность, выходная мощность и т.д. Контроллер 200 выполнен с возможностью определения, с помощью значения электрической характеристики, крутящего момента звездочки (шаг 810). В качестве иллюстративного примера крутящий момент звездочки может быть определен на основе значения мощности двигателя и скорости вращения звездочки. Используя эти значения, может быть вычислен крутящий момент. Затем на основе крутящего момента звездочки может быть вычислено натяжение цепи (шаг 815). Как указывалось выше, натяжение цепи связано с величиной растяжения в цепи. Используя сохраненную зависимость (например, в памяти 240) между натяжением цепи и растяжением цепи, может быть определена величина удлинения цепи (шаг 820). Затем величина удлинения цепи увязывается (например, прямо или косвенно) с требуемым положением гидравлического цилиндра или требуемым изменением в положении гидравлического цилиндра (шаг 825). На основе требуемого положения или изменения в положении гидравлического цилиндра контроллер 200 генерирует один или более управляющих сигналов для управления гидравлическим цилиндром в соответствии с его новым положением (шаг 830). Хотя процесс 800 описывается выше в отношении управления положением гидравлического цилиндра, процесс 800 может быть подобным образом выполнен в отношении различных характеристик AFC или системы горных разработок длинными забоями, таких как положение звездочки, натяжение цепи, положение выемочного комбайна, количество угля, погруженного на AFC, положение выдвижной части рамы 100 и т.д.
[0055] На фиг.9 представлен процесс 900 управления AFC. На шаге 905 измеряется натяжение цепи с помощью датчика натяжения цепи. Датчик натяжения цепи генерирует сигнал (шаг 910), который указывает измеренное натяжение цепи. Сигнал натяжения цепи принимается контроллером 200, в котором модуль преобразования сигнала преобразует сигнал натяжения цепи (шаг 915) (например, выборки, средние значения и т.д.). Преобразованный сигнал натяжения цепи затем используется для идентификации или определения измеренного натяжения в одной или более цепях (шаг 920). Например, преобразованный сигнал натяжения цепи может соответствовать усредненному значению электрического напряжения от датчика натяжения цепи. Зависимость между усредненным электрическим напряжением и натяжением цепи используется затем для определения фактического соответствующего натяжения цепи. Как описано выше, натяжение цепи связано с величиной растяжения в цепи. Используя сохраненную зависимость (например, в памяти 240) между натяжением цепи и растяжением цепи, может быть определена величина удлинения цепи (шаг 925). Затем величина удлинения цепи увязывается (например, прямо или косвенно) с требуемым положением гидравлического цилиндра или требуемым изменением в положении гидравлического цилиндра (шаг 930). На основе требуемого положения или изменения в положении гидравлического цилиндра контроллер 200 генерирует один или более управляющих сигналов для управления гидравлическим цилиндром в соответствии с его новым положением (шаг 935). Хотя процесс 900 описывается выше в отношении управления положением гидравлическим цилиндром, процесс 900 может быть подобным образом выполнен в отношении различных характеристик AFC или системы горных разработок длинными забоями, таких как положение звездочки, натяжение цепи, положение выемочного комбайна, количество угля, погруженного на AFC, положение выдвижного участка рамы 100 и т.д.
[0056] На фиг.10-11 представлен участок забойного конвейера 1022, включая концевую станцию 1026 (фиг.11), элемент транспортировки (конвейера) или цепь 1014, которая движется между концевой станцией 1026 и разгрузочной станцией (не показана), и узел 1010 датчика рядом с концевой станцией 1026. Концевая станция 1026 включает в себя раму 1038, вал холостого хода или натяжной вал 1042, установленный на раме 1038, и по меньшей мере один гидравлический привод (не показан). Рама 1038 перемещается по отношению к разгрузочной станции между внутренним втянутым положением и внешним выдвинутым положением за счет выдвижения и втягивания гидравлического привода. Цепь 1014 проходит вокруг натяжного вала 1042 для перемещения в виде непрерывной петли между разгрузочной станцией и концевой станцией 1026. Цепь 1014 содержит множество скребковых элементов 1050, установленных на цепи 1014 и разнесенных на первое расстояние в направлении движения 1054 цепи 1014.
[0057] Как показано на фиг.12-15, узел 1010 датчика расположен примыкающим к сменной накладке 1062 фланцевой части 1066 рамы 1038 и содержит реактивный рычаг 1070, ось 1074 шарнира главной опоры, реактивный кронштейн 1078 (фиг.13-14), штифт 1082 измерения нагрузки (фиг.13-14) и пружинный механизм 1086. Примеры узлов датчиков могут быть также найдены в заявке на патент США №13/297067, озаглавленной «Датчик натяжения цепи» ("CHAIN TENSION SENSOR") и поданной 15 ноября 2011 г., и заявке на патент США №13/553487, озаглавленной «Датчик натяжения цепи» ("CHAIN TENSION SENSOR") и поданной 19 июля 2012 г., содержание которых настоящим полностью включается в настоящую заявку путем ссылки.
[0058] Другой пример узла датчика раскрыт в патенте США №8061510, озаглавленном «Двухсенсорный детектор обрыва цепи» ("DUAL SENSOR CHAIN BREAK DETECTOR"), который был выдан 22 ноября 2011 г., и содержание которого настоящим полностью включается в настоящую заявку путем ссылки.
[0059] Реактивный рычаг 1070 имеет первый конец 1090, плечо 1094, второй конец 1098 (фиг.13) и нагрузочную площадку 1102. Первый конец 1090 соединен с возможностью вращения с вторичной опорной плитой 1106 рамы 1038 с помощью оси 1074 шарнира главной опоры. Плечо 1094 располагается вблизи от первого конца 1090. Второй конец 1098 имеет отверстие 1122 (фиг.13 and 14), простирающееся от второго конца 1098 частично через реактивный рычаг 1070 в продольном направлении. Нагрузочная площадка 1102 располагается между первым концом 1090 и вторым концом 1098. Как показано на фиг.11, нагрузочная площадка 1102 располагается параллельно сменной накладке 1062 для контактирования со скребковыми элементами 1050, минующими сменную накладку 1062, побуждая реактивный рычаг 1070 поворачиваться вокруг оси 1074 шарнира. Нагрузочная площадка 1102 также обеспечивает непрерывную направляющую поверхность для направления скребковых элементов 1050 во время движения скребковых элементов 1050 вокруг натяжного вала 1042.
[0060] Ось 1074 шарнира крепится к вторичной опорной плите 1106 рамы 1038 и располагается по существу поперек направления движения 1054 цепи 1014. Ось 1074 шарнира ограничивает движение реактивного рычага 1070 в любом направлении, кроме вращения (см. стрелку 1130) вокруг оси 1074 шарнира.
[0061] Как показано на фиг.13-15, реактивный кронштейн 1078 устанавливается на вторичной опорной плите 1106 рамы 1038 и имеет паз 1138. Реактивный кронштейн 1078 выполнен с возможностью регулировки в пределах второго конца 1098 реактивного рычага 1070 таким образом, что паз 1138 совмещается с отверстием 1122, проходящим через реактивный рычаг 1070. Штифт 1082 измерения нагрузки устанавливается в пазе 1138 реактивного кронштейна 1078 и внутри отверстия 1122 реактивного рычага 1070. Штифт 1082 измерения нагрузки, таким образом, размещается по существу перпендикулярно оси 1074 шарнира. Штифт 1082 измерения нагрузки подсоединяется к измерительному кабелю 1150 (фиг.14 и 15).
[0062] Как показано на фиг.16, плечо 1094 имеет сторону 1162 головки болта, сторону 1166 пружины и отверстие 1168, проходящее между стороной 1162 головки болта и стороной 1166 пружины сквозь реактивный рычаг 1070 в направлении по касательной к направлению вращения 1130 реактивного рычага 1070 (то есть перпендикулярно оси 1074 шарнира). Как видно из фиг.16 и 17, пружинный механизм 1086 включает в себя шпильку или болт 1170, гайку 1172, множество пружинных шайб 1174 и стопорную шайбу 1178. Болт 1170 соединен со сменной накладкой 1062 и проходит через отверстие 1168 плеча. Болт 1170 имеет гладкую часть 1180, буртик 1182 и резьбовую часть 1184 для накручивания по резьбе гайки 1172, которая затягивается для закрепления плеча 1094 к болту 1170.
[0063] Пружинные шайбы 1174 надевают на болт 1170 со стороны 1166 пружины между плечом 1094 и сменной накладкой 1062. В варианте, показанном на фиг.18, болт 1170 имеет полую нишу 1186 для уменьшения физического контакта между сменной накладкой 1062 и болтом 1170, что сокращает количество тепла, переносимого от сменной накладки 1062 к болту 1170. Стопорную шайбу 1178 располагают между стороной 1166 пружины плеча 1094 и пружинными шайбами 1174. Стопорную шайбу 1178 навинчивают на болт 1170 по резьбовой части 1184 болта 1170, надежно «захватывая» пружинные шайбы 1174 вокруг гладкой части 1180. Каждая пружинная шайба 1174 имеет в общем форму усеченного конуса, что создает силу сжатия пружины, когда пружинная шайба 1174 подвергается сжатию. Сжатие пружинных шайб 1174, таким образом, создает силу предварительной нагрузки на реактивный рычаг 1070, отклоняя реактивный рычаг 1070 от рамы 1038. Стопорная шайба 1178 центрует самые верхние пружинные шайбы 1174 по отношению к болту 1170.
[0064] В варианте, показанном на фиг.16, гайка 1172 является колпачковой, чтобы предотвратить поджатие гайки 1172 к плечу 1094. Это создает зазор между гайкой 1172 и реактивным рычагом 1070, обеспечивая приложение силы предварительной нагрузки пружинных шайб 1174 к штифту 1082 измерения нагрузки. В другом варианте (см. фиг.17-19) гайка 1172 является открытой, что позволяет прижимать гайку 1172 к плечу 1094 (фиг.19). По мере того как гайку 1172 затягивают, стопорная шайба 1178 сжимает каждую пружинную шайбу 1174, и плечо 1094 реактивного рычага фиксируется стопорной шайбой 1178. Затягивание гайки 1172 приближает стопорную шайбу 1178 к буртику 1182 болта (фиг.18). Как только стопорная шайба 1178 коснется буртика 1182 болта, гайку 1172 затянуть больше будет невозможно. Таким образом буртик 1182 болта обеспечивает механическую блокировку, предотвращая чрезмерное сжатие пружинных шайб 1174.
[0065] Пружинные шайбы 1174 могут быть сложены вместе различными конфигурациями компоновок для получения необходимой силы предварительной нагрузки на реактивный рычаг 1070. Например, пружинные шайбы 1174 могут быть сложены перемежающимися наборами таким образом, что «пики» двух шайб 1174 находятся друг на друге, а «пики» соседних шайб 1174 направлены в противоположную сторону по отношению к первым двум (см. фиг.18). Требуемая компоновка может быть выполнена с использованием меньшего или большего количества шайб 1174 в каждом наборе. В другом варианте все шайбы 1174 могут быть установлены в одном направлении. В еще одном варианте может использоваться одна пружинная шайба 1174. В других конструкциях могут использоваться другой тип или другая форма пружины.
[0066] Множество прокладок 1190 (см. фиг.19) может быть добавлено в область между стопорной шайбой 1178 и полой нишей 1186, чтобы учесть накопление допусков в болтовом соединении и/или приложить дополнительную силу сжатия на пружинную(-ые) шайбу(-ы) 1174.
[0067] Во время работы нагрузочная площадка 1102 реактивного рычага 1070 вступает в контакт со скребковыми элементами 1050 цепи 1014 по мере того, как скребковые элементы 1050 перемещаются между концевой станцией 1026 и разгрузочной станцией. Тем самым нагрузочная площадка 1102 подвергается воздействию вертикальной составляющей натяжения цепи. Контакт со скребковыми элементами 1050 побуждает реактивный рычаг 1070 поворачиваться вокруг оси 1074 шарнира.
[0068] Как видно из фиг.14, в то время как реактивный рычаг 1070 поворачивается в направлении вращения 1130, второй конец 1098 отклоняется вверх, создавая направленную вверх силу, которая оказывает давление на штифт 1082 измерения нагрузки. Реактивный кронштейн 1078 оказывает сопротивление этому отклонению, вызывая появление направленной вниз силы, оказывающей давление на штифт 1082 измерения нагрузки, тем самым создавая условие для сдвигающей нагрузки на штифт 1082. Штифт 1082 измерения нагрузки воспринимает величину усилия сдвига и/или механического напряжения и передает сигнал, показывающий усилие или механическое напряжение, через измерительный кабель 1150 в контроллер цепи (не показан). Контроллер цепи затем использует эту информацию для определения натяжения в цепи 1014 и для вычисления необходимого изменения в положении рамы 1026 концевой станции для поддержания необходимого натяжения в цепи 1014.
[0069] Сила смещения пружинного механизма 1086 создает силу предварительной нагрузки, которая может быть откалибрована. Вместо калибровки натяжения по максимальной нагрузке, которую может испытывать цепь 1014 в процессе эксплуатации (например, в одном варианте выполнения примерно пять тонн, в других вариантах эта максимальная нагрузка может быть больше или меньше данного значения), положительная предварительная нагрузка дает возможность установить натяжение цепи на меньшую нагрузку. Это может уменьшить межзвенный износ цепи и износ звездочки и, в конечном счете, увеличить срок службы цепи 1014. Кроме того, «сочетание» допусков пружинных шайб 1174 обеспечивает широкий диапазон конфигураций и характеристик предварительной нагрузки для реактивного рычага 1070. В одном примере предварительная нагрузка в диапазоне от 200 до 400 фунтов (от 90,7 до 181,4 кг) может обеспечить улучшенные результаты даже при очень высоких нагрузках материалом.
[0070] В одном варианте предварительная нагрузка действует на реактивный рычаг 1070 в «положительном» направлении (то есть по существу параллельно направлению силы, действующей на реактивный рычаг 1070 со стороны скребковых элементов 1050). Положительная базовая нагрузка может способствовать точным измерениям тензометрических датчиков, повышая точность системы. Кроме того, положительная предварительная нагрузка может также сократить появление отрицательных выходных сигналов, которые могут вызвать ложное срабатывание системы аварийного оповещения.
[0071] Благодаря перпендикулярной ориентации штифта 1082 измерения нагрузки относительно оси 1074 шарнира штифт 1082 измерения нагрузки измеряет только вертикальную составляющую (например, поворот реактивного рычага 1070 вокруг оси 1074 шарнира) силы, действующей на реактивный рычаг 1070. Это эффективно изолирует штифт 1082 измерения нагрузки от воздействий на нагрузочную площадку 1102 реактивного рычага 1070, что ведет к повышению надежности и более точному электрическому сигналу.
[0072] Кроме того, в одном варианте осуществления нагрузочная площадка 1102 имеет длину, которая составляет значительную часть расстояния между скребковыми элементами 1050. В одном варианте осуществления нагрузочная площадка 1102 имеет длину в диапазоне между примерно 60% и примерно 70% расстояния между скребковыми элементами 1050. Такая существенная длина обеспечивает меньший интервал времени между моментом, когда один скребковый элемент 1050 входит в контакт с нагрузочной площадкой 1102, и моментом, когда второй скребковый элемент 1050 входит в контакт с нагрузочной площадкой 1102, снижая колебания нагрузочной площадки 1102 (а значит, и штифта 1082 измерения нагрузки) между нагруженным положением и ненагруженным положением. Это помогает штифту измерения нагрузки в генерировании плавного, ровного сигнала.
[0073] Паразитная нагрузка, возникающая в результате воздействия скребковых элементов 1050 на нагрузочную площадку 1102, поглощается осью 1074 шарнира главной опоры, которая располагается под прямым углом к направлению движения 1054 как цепи 1014, так и скребковых элементов 1050. Кроме того, штифт 1082 измерения нагрузки не находится в прямом контакте со сменной накладкой 1062, что снижает ударную нагрузку и изолирует штифт 1082 измерения нагрузки от тепла, создаваемого фрикционным контактом скребковых элементов 1050, скользящих вдоль нижней части сменной накладки 1062.
[0074] В другом независимом варианте осуществления изобретения конвейер 1022 может содержать множество узлов 1010 датчиков нагрузки. Например, конвейер 1022 может содержать узел 1010 датчика нагрузки, установленный на каждой стороне цепи 1014, где каждый датчик 1010 измеряет натяжение в соответствующей цепи 1014 независимо, что позволяет оператору выявлять разрыв в каждой цепи 1014. Поскольку цепи 1014 соединены друг с другом с помощью скребковых элементов 1050, некоторая часть нагрузки на растяжение в цепях 1014 будет перераспределена в случае разрыва какой-либо цепи 1014.
[0075] Хотя описанное местоположение узла 1010 датчика имеет преимущество, поскольку узел 1010 датчика подвергается меньшим прямым ударным нагрузкам, в другом варианте узлы 1010 датчиков могут быть разнесены по длине и с каждой стороны конвейера 1022.
[0076] Таким образом, изобретение может в целом обеспечить, среди прочего, системы и способы управления работой системой горных разработок на основе электрической характеристики и/или датчика натяжения.
Реферат
Изобретение относится к системе и способу управления конвейером в системе горных разработок. Техническим результатом является автоматическое управление натяжением цепи путем изменения положения звездочки с помощью гидравлического цилиндра. Конвейер для системы горных разработок содержит раму, имеющую фиксированный первый конец и выдвижной второй конец, первую звездочку, имеющую первое положение, вторую звездочку, имеющую второе положение, при этом первое положение отделено некоторым расстоянием от второго положения, цепь, связанную с первой звездочкой и второй звездочкой, датчик, выполненный с возможностью генерирования сигнала, связанного с электрической характеристикой конвейера, приводной механизм, соединенный с первой звездочкой и/или второй звездочкой, причем приводной механизм выполнен с возможностью приведения в движение первой звездочки и/или второй звездочки, гидравлический цилиндр и контроллер, выполненный с возможностью приема сигнала от датчика, определения величины растяжения цепи в цепи на основе принятого сигнала, определения положения гидравлического цилиндра на основе определенной величины растяжения цепи и генерирования сигнала управления для управления гидравлическим цилиндром в соответствии с определенным положением гидравлического цилиндра. 3 н. и 17 з.п. ф-лы, 19 ил.
Комментарии