Автоматизированные операции горной машины - RU2617498C2
Код документа: RU2617498C2
Чертежи


















Описание
Настоящая заявка испрашивает приоритет по временным патентным заявкам U.S. Provisional Patent Application No. 61/514,542, зарегистрирована 3 августа 2011 г., U.S. Provisional Patent Application No. 61/514,543, зарегистрирована 3 августа 2011 г., и U.S. Provisional Patent Application No. 61/514,566, зарегистрирована 3 августа 2011 г., полностью включены в данный документ в виде ссылки. В настоящую заявку также полностью включены в виде ссылки безусловные патентные заявки U.S. Non-Provisional Patent Application No. 13/566,462, зарегистрирована 3 августа 2012 г. под названием " MATERIAL HANDLING SYSTEM FOR MINING MACHINE " и U.S. Non-Provisional Patent Application No. 13/566,150, зарегистрирована 3 августа 2012 г. под названием "STABILIZATION SYSTEM FOR MINING MACHINE".
Варианты осуществления настоящего изобретения относятся к автоматизированным операциям горных машин, таких как горные машины разработки твердых горных пород непрерывного действия.
Традиционно, выемка твердой горной породы проводится с помощью взрывной или механической выемки. Взрывная выемка включает в себя бурение серии шпуров в горную породу, подлежащую выемке, и заряжание шпуров взрывчатым веществом (ВВ). ВВ затем подрывают в последовательности, разработанной для отбойки требуемого объема горной породы. Отбитую породу затем удаляют с помощью подходящего погрузочного и транспортного оборудования. Стремительная отбойка горной породы не позволяет автоматизировать взрывной способ и, как следствие, делает способ неэффективным и непрогнозируемым.
При механической выемке исключается использование ВВ и применяется технология с режущим элементом в виде головки с дисковыми шарошками для резания горной породы для выемки. Режущий элемент в виде головки с дисковыми шарошками, вместе с тем, требует приложения очень больших сил для разрушения и дробления горной породы, выемку которой проводят. Например, средняя сила, требуемая на резце составляет около 50 тонн, и обычные пиковые силы, испытываемые каждым резцом часто составляют более 100 тонн. С учетом данных требуемых сил, обычно располагают многочисленные резцы (например, 50 режущих элементов) в группе поперек горной породы с небольшими интервалами с параллельными траекториями движения. Данные группы резцов могут весить до 800 тонн или больше и часто требуют электрической мощности порядка тысяч киловатт. По существу, применение данного механического оборудования может являться экономически оправданным только в больших проектах, таких как строительство тоннелей подачи воды и тоннелей гидроэлектростанций.
Горные машины с вибрационными дисковыми резцами (часто именуются проходческими комбайнами непрерывного действия для твердой горной породы) снимает многие проблемы, относящиеся к машинам с врубовыми головками с дисковыми шарошками. В горных машинах с вибрационными дисковыми резцами используются дисковые режущие элементы с эксцентричным приводом для резания породы. Вследствие вибрационной работы дисковых режущих элементов, горные машины с вибрационными дисковыми резцами требуют уменьшенной силы для отбойки породы, чем машины с врубовыми головками с дисковыми шарошками. Соответственно, горные машины с вибрационными дисковыми резцами более эффективны в работе, чем машины с врубовыми головками с дисковыми шарошками. Горные машины с вибрационными дисковыми резцами, вместе с тем, имеют много проблем, связанных с безопасностью оператора и низкой производительностью работы. В частности, для ручного управления машиной часто требуется нахождение оператора вблизи машины для наблюдения за ее работой.
Варианты осуществления изобретения поэтому создают способы и системы для автоматического управления горной проходческой машиной непрерывного действия. Один способ включает в себя автоматическое управление по меньшей мере одним исполнительным механизмом для установки платформы, несущей врубовую головку, в заданное положение для пуска и автоматическое управление по меньшей мере одним исполнительным механизмом для выдвижения платформы к разрабатываемому забою до входа врубовой головки в контакт с разрабатываемым забоем и превышения заданного значения по меньшей мере одним индикатором физической силы, действующей между врубовой головкой и разрабатываемым забоем. Способ также включает в себя автоматическое сохранение по меньшей мере одной координаты разрабатываемого забоя на машиночитаемом носителе, причем по меньшей мере одна координата основана на параметре по меньшей мере одного исполнительного механизма, когда индикатор превышает заданное значение.
Одна система включает в себя платформу, несущую врубовую головку, по меньшей мере один исполнительный механизм для линейного перемещения платформы, и систему управления, выполненную с возможностью проведения автоматизированной операции обнаружения разрабатываемого забоя, не требуя взаимодействия с ручным управлением. Система управления выполняет автоматизированную операцию обнаружения разрабатываемого забоя посредством (I) управления по меньшей мере одним исполнительным механизмом для установки платформы в заданное положение для пуска, (II) управления по меньшей мере одним исполнительным механизмом для выдвижения платформы к разрабатываемому забою до входа врубовой головки в контакт с разрабатываемым забоем, и превышения заданного значения по меньшей мере одним индикатором физической силы, действующей между врубовой головкой и разрабатываемым забоем, и (III) сохранения по меньшей мере одной координаты разрабатываемого забоя на машиночитаемом носителе, причем по меньшей мере одна координата основана на параметре по меньшей мере одного исполнительного механизма, когда индикатор превышает заданное значение.
Другая система включает в себя платформу и рычаг, соединенный с платформой и включающий в себя врубовую головку. Система также включает в себя первый исполнительный механизм, выполненный с возможностью линейного перемещения платформы, второй исполнительный механизм, выполненный с возможностью горизонтального поворота рычага, и третий исполнительный механизм, выполненный с возможностью отклонения рычага от вертикали. В дополнение система включает в себя систему управления, выполненную с возможностью (I) автоматического управления первым исполнительным механизмом для установки платформы в заданное положение выдвижения для пуска, (II) автоматического управления вторым исполнительным механизмом для установки рычага в заданное положение поворота для пуска, (III) автоматического управления третьим исполнительным механизмом для установки рычага в заданное положение наклона для пуска, и (IV) автоматического управления первым исполнительным механизмом для перемещения платформы из заданного положения для пуска к разрабатываемому забою до входа врубовой головки в контакт с разрабатываемым забоем и нагнетания в первом исполнительном механизме давления до заданного значения. Система управления также выполнена с возможностью (V) автоматического сохранения первой координаты разрабатываемого забоя на основе положения первого исполнительного механизма, когда давление в первом исполнительном механизме нагнетается до заданного значения, (VI) автоматического сохранения второй координаты разрабатываемого забоя на основе положения второго исполнительного механизма, когда давление в первом исполнительном механизме нагнетается до заданного значения, и (VII) автоматического сохранения третьей координаты разрабатываемого забоя на основе положения третьего исполнительного механизма, когда давление в первом исполнительном механизме нагнетается до заданного значения.
Другой способ включает в себя выборку из памяти по меньшей мере одной координаты разрабатываемого забоя, сохраненной на машиночитаемом носителе, автоматическое управление по меньшей мере одним исполнительным механизмом для установки платформы на заданном для пуска расстоянии от по меньшей мере одной координаты, причем платформа несет врубовую головку, и автоматическое управление по меньшей мере одним исполнительным механизмом для выдвижения платформы к разрабатываемому забою и за по меньшей мере одну координату на заданную глубину вруба для выполнения разработки забоя с помощью врубовой головки.
Еще одна система включает в себя платформу, несущую врубовую головку, по меньшей мере один исполнительный механизм, выполненный с возможностью линейного перемещения платформы, и систему управления, выполненную с возможностью проведения автоматизированной операции резания без взаимодействия с ручным управлением. Система управления выполняет автоматизированную операцию резания посредством (I) выборки из памяти по меньшей мере одной координаты разрабатываемого забоя, сохраненной на машиночитаемом носителе, (II) управления по меньшей мере одним исполнительным механизмом для установки платформы на заданном расстоянии от по меньшей мере одной координаты, и (III) управления по меньшей мере одним исполнительным механизмом для выдвижения платформы к разрабатываемому забою и за по меньшей мере одну координату на заданную глубину вруба для разработки забоя с помощью врубовой головки.
Еще одна система включает в себя платформу и рычаг, соединенный с платформой и включающий в себя врубовую головку. Система также включает в себя первый исполнительный механизм, выполненный с возможностью линейного перемещения платформы, второй исполнительный механизм, выполненный с возможностью горизонтального поворота рычага, и третий исполнительный механизм, выполненный с возможностью отклонения рычага от вертикали. В дополнение, система включает в себя систему управления, выполненную с возможностью (I) выборки из памяти первой координаты разрабатываемого забоя и второй координаты разрабатываемого забоя, сохраненной на машиночитаемом носителе, (II) автоматического управления первым исполнительным механизмом для установки платформы на заданном для пуска расстоянии от первой координаты, (III) автоматического управления вторым исполнительным механизмом для установки рычага в заданное положение резания, и (IV) автоматического управления третьим исполнительным механизмом для установки рычага в нужное положение на основе второй координаты. Система управления также выполнена с возможностью (V) автоматического управления первым исполнительным механизмом для выдвижения платформы к разрабатываемому забою и за первую координату на заданную глубину вруба, (VI) автоматического управления вторым исполнительным механизмом для поворота рычага на максимальный угол для вруба в забой с помощью врубовой головки, и (VII) автоматического обновления первой координаты на основе заданной глубины вруба.
Другой способ включает в себя выборку из памяти по меньшей мере одной координаты разрабатываемого забоя, сохраненной на машиночитаемом носителе, автоматическое управление первым исполнительным механизмом для установки платформы с заданным зазором от по меньшей мере одной координаты, причем платформа несет врубовую головку, и автоматическое управление вторым исполнительным механизмом для установки рычага в положение для перемещения по выработке после установки в требуемое положение платформы с заданным зазором от по меньшей мере одной координаты, причем рычаг соединяется с платформой и включает в себя врубовую головку.
Дополнительно система включает в себя платформу, рычаг, соединенный с платформой и включающий в себя врубовую головку, первый исполнительный механизм, выполненный с возможностью линейного перемещения платформы, и второй исполнительный механизм, выполненный с возможностью горизонтального поворота рычага. Система также включает в себя систему управления, выполненную с возможностью проведения автоматизированной операции по подготовке перемещения по выработке, не требуя взаимодействия с ручным управлением. Система управления выполняет автоматизированную подготовку к перемещению по выработке, управляя посредством (I) выборки из памяти по меньшей мере одной координаты разрабатываемого забоя, сохраненной на машиночитаемом носителе, (II) управления первым исполнительным механизмом для установки платформы с заданным зазором от по меньшей мере одной координаты, и (II) управления вторым исполнительным механизмом для поворота рычага в заданное положение для перемещения по выработке после установки в требуемое положение платформы с заданным зазором от по меньшей мере одной координаты.
Еще одна система включает в себя платформу, рычаг, соединенный с платформой и включающий в себя врубовую головку, первый исполнительный механизм, выполненный с возможностью линейного перемещения платформы, и второй исполнительный механизм, выполненный с возможностью горизонтального поворота рычага. Система также включает в себя систему управления, выполненную с возможностью (I) автоматической выборки из памяти по меньшей мере одной координаты разрабатываемого забоя, (II) автоматического управления первым исполнительным механизмом для установки платформы на заданном расстоянии от по меньшей мере одной координаты, и (III) автоматического управления вторым исполнительным механизмом поворота рычага в положение для перемещения по выработке после установки в требуемое положение платформы на заданном расстоянии от по меньшей мере одной координаты. Система управления также выполнена с возможностью (IV) автоматического управления первым исполнительным механизмом для установки платформы в заданное для резания положение после поворота рычага в положение для перемещения по выработке, и (V) перемещения по выработке машины после установки платформы в положение резания.
Еще один способ включает в себя выполнение автоматизированной операции резания, не требующей взаимодействия с ручным управлением с использованием врубовой головки на рычаге, соединенном поворотном шарниром подвижной платформой, и остановку автоматизированной операции резания, не требующей взаимодействия с ручным управлением. Остановка автоматизированной операции резания включает в себя (I) остановку по меньшей мере одного двигателя, приводящего в действие врубовую головку, (II) управления первым исполнительным механизмом для отвода платформы от разрабатываемого забоя на заданное расстояние, и (III) управление вторым исполнительным механизмом для поворота рычага в заданное положение для перемещения по выработке.
Другая система включает в себя платформу, рычаг, соединенный с платформой и включающий в себя врубовую головку, первый исполнительный механизм, выполненный с возможностью линейного перемещения платформы, и второй исполнительный механизм, выполненный с возможностью горизонтального поворота рычага. Система также включает в себя систему управления, выполненную с возможностью проведения автоматизированной операции резания, не требуя взаимодействия с ручным управлением и остановки автоматизированной операции резания, не требующей взаимодействия с ручным управлением. Система управления останавливает автоматизированную операцию резания посредством (I) остановки по меньшей мере одного двигателя, приводящего в действие врубовую головку, (II) управления первым исполнительным механизмом для отвода платформы от разрабатываемого забоя на заданное расстояние, и (III) управления вторым исполнительным механизмом для поворота рычага в заданное положение для перемещения по выработке.
Еще одна система включает в себя платформу, рычаг, соединенный с платформой и включающий в себя врубовую головку, первый исполнительный механизм, выполненный с возможностью линейного перемещения платформы, и второй исполнительный механизм, выполненный с возможностью горизонтального поворота рычага. Система управления также включает в себя систему управления, выполненную с возможностью приема команды на остановку работы из блока дистанционного управления, когда насос работает, и выполнения автоматизированной операции остановки работы в ответ на команду, не требуя взаимодействия с ручным управлением. Система управления выполняет автоматизированную операцию остановки работы посредством (I) управления первым исполнительным механизмом для установки платформы в выдвинутое положение для резания, (II) управления вторым исполнительным механизмом для поворота рычага в положение поворота для резания после установки платформы в выдвинутое положение для резания, и (III) остановки насоса после установки рычага в положение поворота для резания.
Сущность изобретения поясняется на чертежах, где:
На фиг.1 показана горная машина проходки твердых горных пород непрерывного действия.
На фиг.2 показано в изометрии врубовое устройство горной машины фиг.1.
На фиг.3 показано в изометрии разобранное врубовое устройство фиг.2.
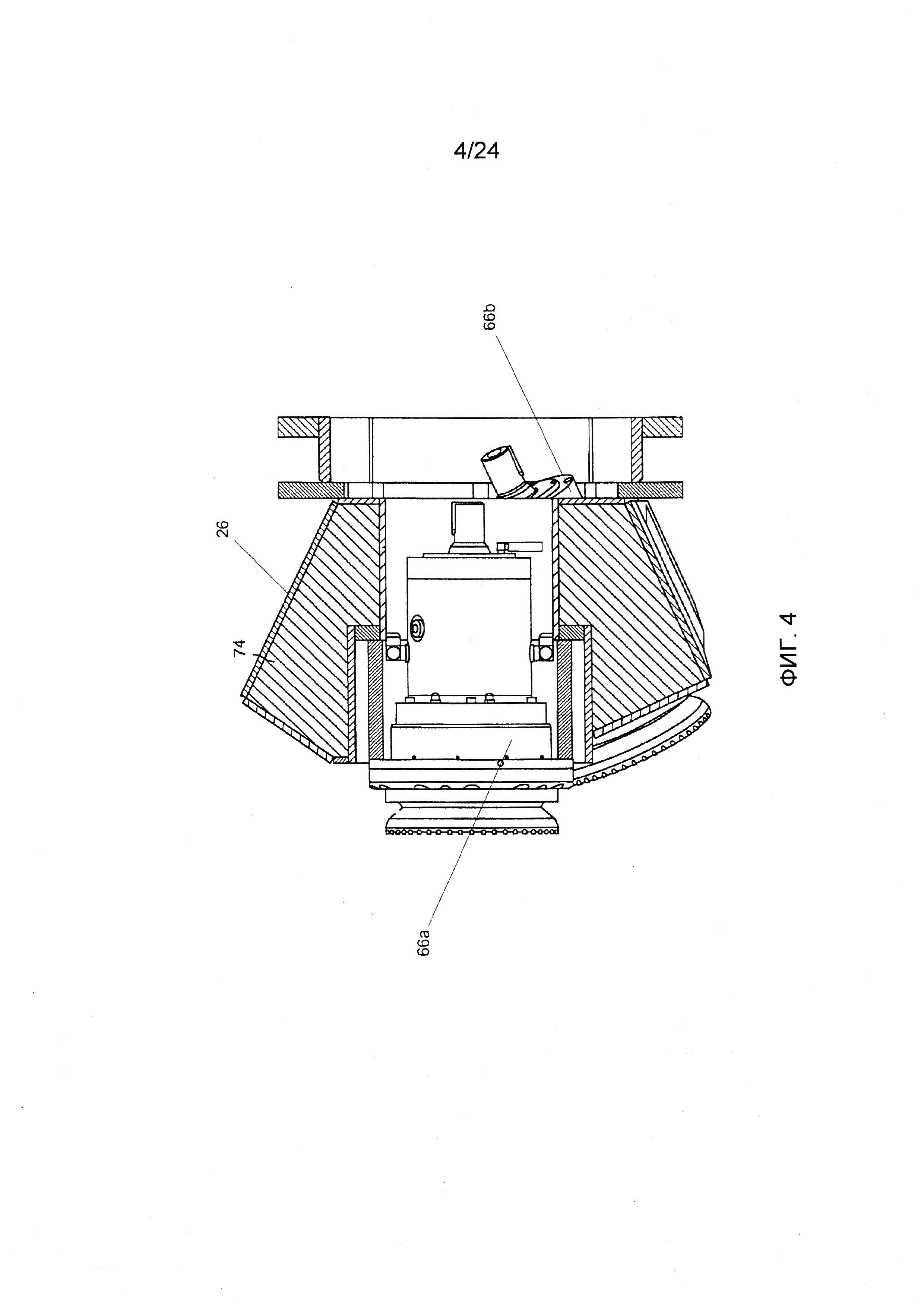
На фиг.4 показана часть сечения врубовой головки врубового устройства фиг.2 по оси 34 фиг.2.
На фиг.5 схематично показана часть вида сверху горной машины фиг.1.
На фиг.6 показан в изометрии поворотное устройство для установки рычага горной машины фиг.1.
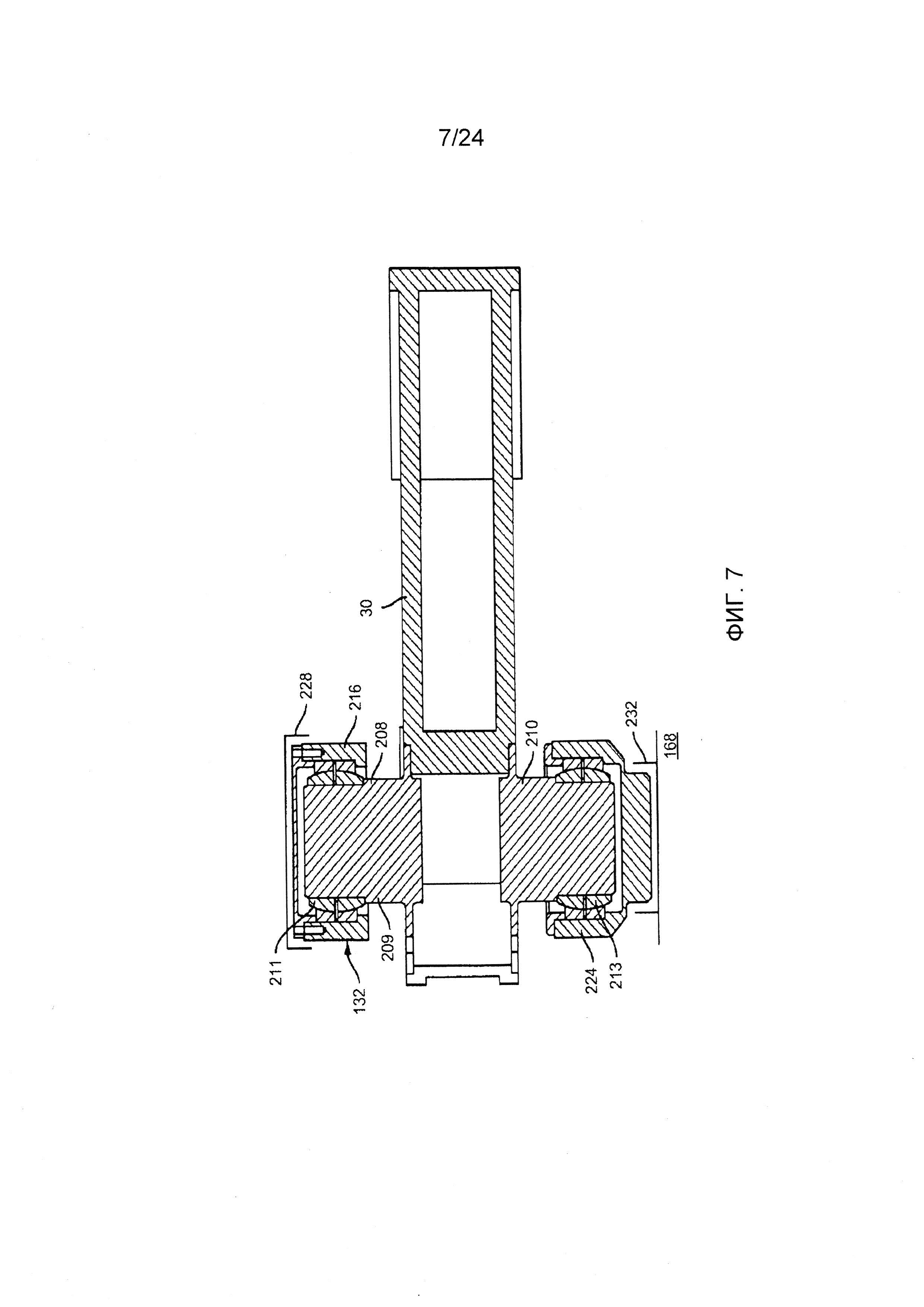
На фиг.7 показано сечение поворотного устройства и рычага фиг.6.
На фиг.8 схематично показана система управления горной машины на фиг.1.
На фиг.9a-c схематично показан по меньшей мере один контроллер системы управления фиг.8.
На фиг.10a-b показаны блок-схемы последовательности автоматизированных операций по подготовке к перемещению в выработке, выполняемой с помощью системы управления фиг.8.
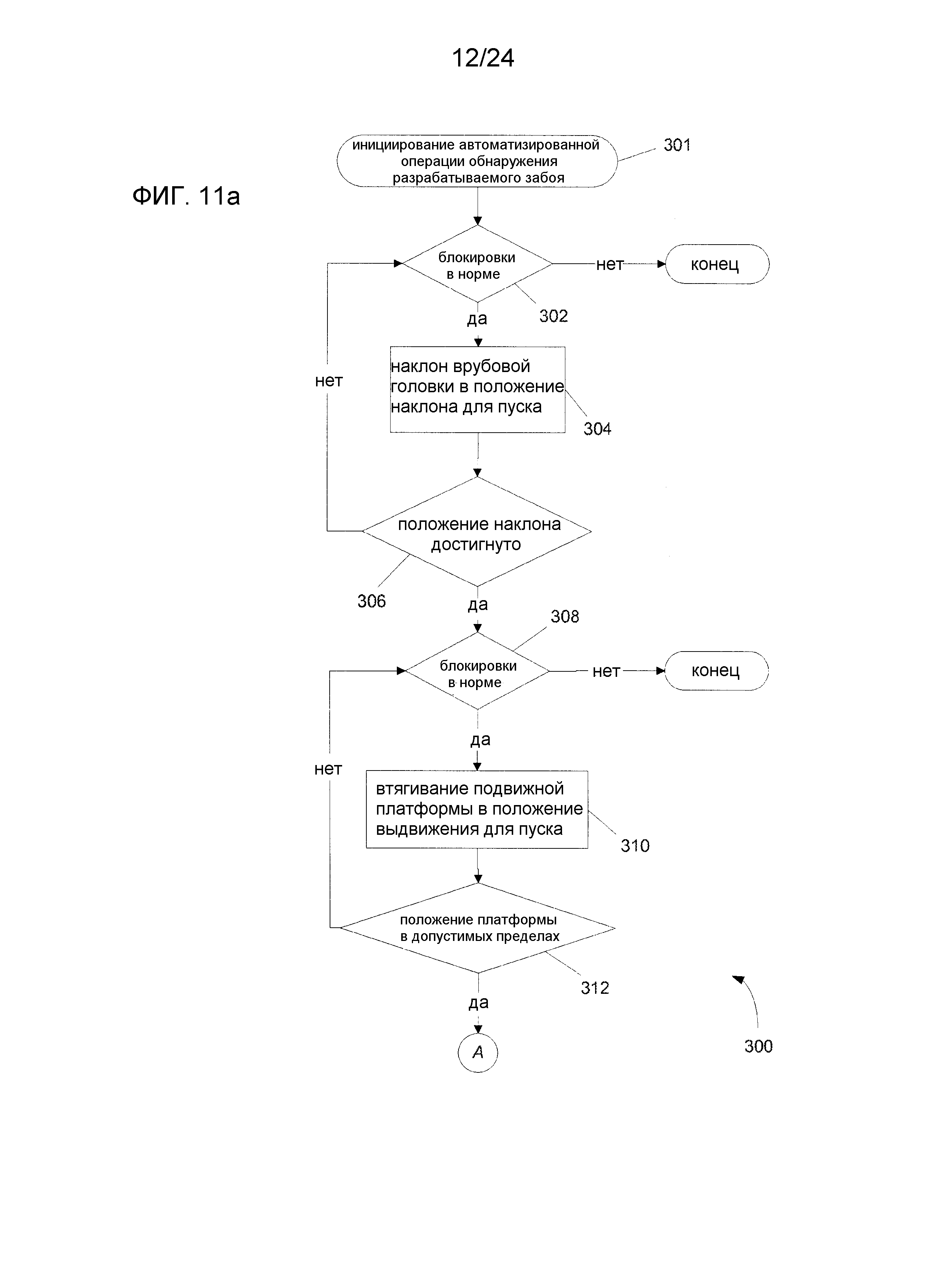
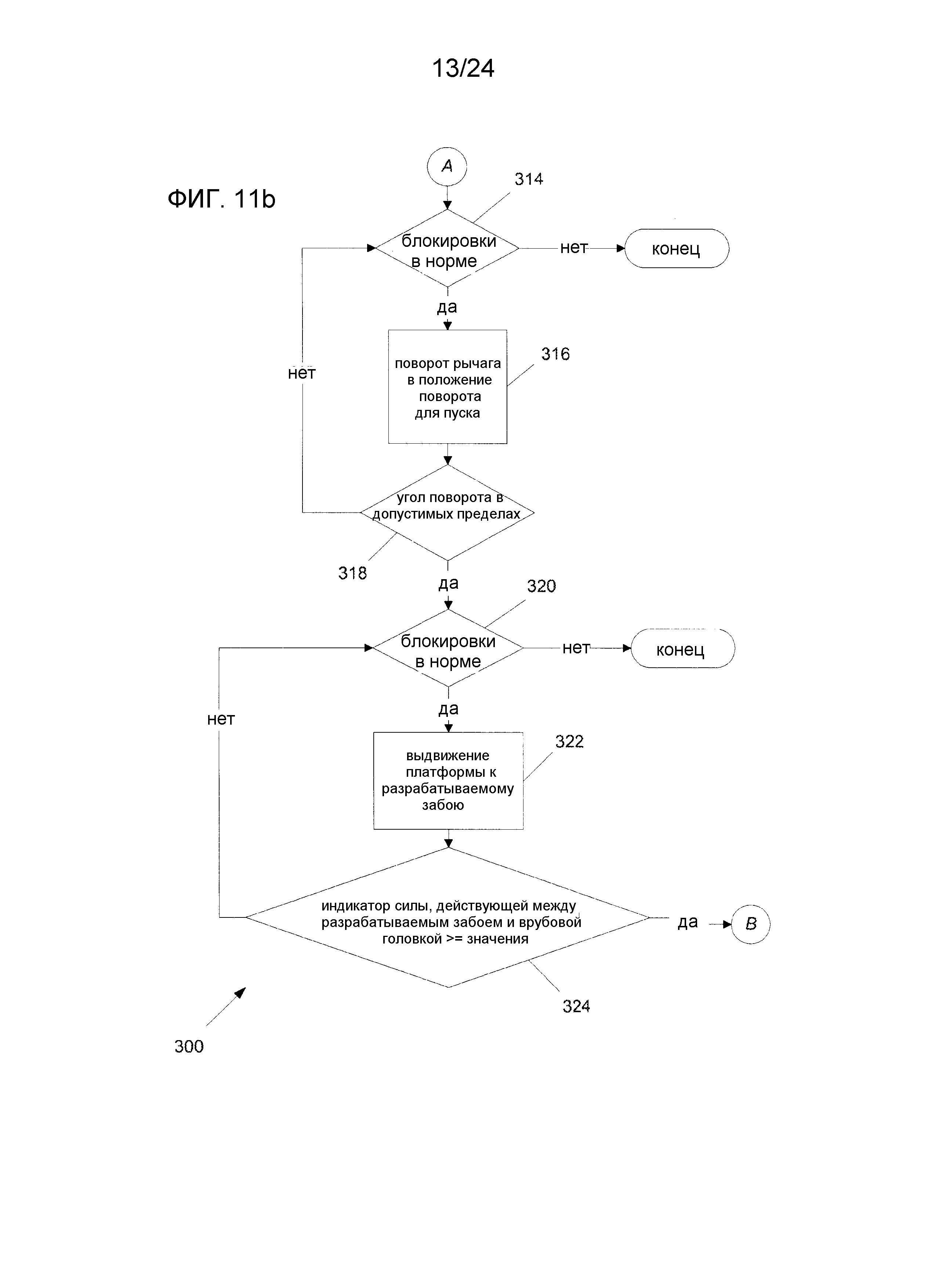
На фиг.11a-c показаны блок-схемы последовательности автоматизированных операций обнаружения разрабатываемого забоя выполняемой с помощью системы управления фиг.8.
На фиг.12a-g показаны блок-схемы последовательности автоматизированных операций резания, выполняемой с помощью системы управления фиг.8.
На фиг.13 показана блок-схема последовательности автоматизированных операций остановки резания, выполняемой с помощью системы управления фиг.8.
На фиг.14a-b показаны блок-схемы последовательности автоматизированных операций остановки работы, выполняемой с помощью системы управления фиг.8.
Для подробного рассмотрения любых вариантов осуществления изобретения следует понимать, что изобретение не ограничено применениям конструкций и устройств следующего описания или прилагаемых чертежей. Изобретение подходит для других вариантов осуществления и реализации на практике различными способами. Также способы, операции и последовательности, описанные в данном документе, могут выполняться в различном порядке. Поэтому, если иное не указано в данном документе, не требуется строгого следования порядку, в котором элементы, этапы или ограничения представлены в подробном описании или формуле изобретения настоящей заявки. Также, если иное не указано в данном документе, способ и этапы способа, описанные в данном документе можно комбинировать, объединяя или разделяя этапы уменьшая или увеличивая их число.
Также, следует понимать, что фразеология и терминология используются в данном документе для описания и не должны считаться ограничивающими. Использование терминов "включающий в себя", "содержащий" или "имеющий" и их вариаций в данном документе охватывает перечисленные за ними позиции и их эквиваленты, а также дополнительные позиции. Термины "установленный", "соединенный" и "спаренный" используются в широком смысле и охватывают как прямые, так и непрямые установку, соединение и спаривание. Дополнительно, "соединенный" и "спаренный" не ограничиваются физическими или механическими соединением или спариванием и могут включать в себя электрическое или гидравлическое соединение или спаривание, прямое или непрямое. Также электронную связь и оповещение можно выполнять с использованием любых известных средств, включающих в себя прямые соединения, беспроводные соединения и т.д.
Следует также отметить, что множество устройств на основе агрегатного и программного обеспечения, а также множество различных конструктивных компонентов можно использовать для реализации изобретения. Кроме того, должно быть понятно, что варианты осуществления изобретения могут включать в себя агрегатное обеспечение, программное обеспечение и электронные компоненты или модули, которые для рассмотрения можно показывать и описывать, как если большинство компонентов реализуются только в агрегатном обеспечении. Вместе с тем, специалист в данной области техники на основе прочтения данного подробного описания должен понимать, что по меньшей мере в одном варианте осуществления основанные на электронике аспекты изобретения можно реализовать в программном обеспечении (например, сохраняемом на несъемном машиночитаемом носителе) выполняемом одним или несколькими процессорами. При этом, следует отметить, что множество устройств на основе агрегатного и программного обеспечения, а также множество различных конструктивных компонентов можно использовать для реализации изобретения. Кроме того, и как описано ниже, конкретные механические конфигурации показаны на чертежах в качестве примеров вариантов осуществления изобретения и возможны другие альтернативные механические конфигурации. Например, "контроллеры", представленные в описании, могут включать в себя стандартные компоненты обработки данных, такие как один или несколько процессоров, один или несколько модулей машиночитаемых носителей, один или несколько интерфейсов ввода/вывода данных и различных соединений (например, системную шину), соединяющую компоненты.
На фиг.1 показана горная машина 10 непрерывного действия. Машина 10 включает в себя корпус или раму 12, врубовое устройство 22 прикрепленное поворотным шарниром к раме 12, и пару гусениц 24 для перемещения машины 10. Машина 10 имеет продольную ось 25 параллельную направлению перемещения машины 10. Каждая гусеница 24 имеет привод от двигателя (например, гидравлического двигателя) для перемещения по выработке горной машины 10, и двигатели управляются и синхронизируются для обеспечения хода вперед, назад, стоянки и выполнения поворотов. В некоторых вариантах осуществления горная машина 10 также включает в себя систему стабилизации 26, помогающую стабилизировать и установить (например, горизонтировать) горную машину 10 во время работы.
Как показано на фиг.2 и 3, врубовое устройство 22 включает в себя врубовую головку 26, рычаг или стрелу 30 имеющую продольную ось 34, и кронштейн 42 для прикрепления врубовой головки 26 к рычагу 30. Рычаг 30 поворачивается на поворотной оси 44 впереди рамы 12. Передняя сторона рамы 12 ближайшая к рычагу 30 образует вертикальную плоскость 45, которая включает в себя поворотную ось 44 и является перпендикулярной продольной оси 25. В контексте настоящей заявки и если иное не указано, когда положение рычага 30 задается углом плоскость 45 служит плоскостью привязки заданного угла. Например, если рычаг 30 устанавливается под углом приблизительно 90 градусов, он устанавливается приблизительно под углом 90 градусов к плоскости 45 (например, приблизительно параллельно продольной оси 25 рамы 12 горной машины 10).
Врубовая головка 26 включает в себя фланец 54 и три отверстия 58 (см. фиг.3). В каждом отверстие 58 съемно размещается дисковый режущий узел 66. Дисковые режущие узлы 66 разнесены друг от друга и ориентированы вдоль отдельных осей. Каждый дисковый режущий узел 66 образует продольную ось 70 вращения (показаны позициями 70a, 70b, и 70c), и дисковые режущие узлы 66 установлены под углом так, что оси 70 вращения узлов 66 являются не параллельными и не пересекаются. Например, как показано на фиг.2, ось 70a центрального дискового режущего узла 66а является по существу коаксиальной с продольной осью 34 рычага 30. Ось 70b нижнего дискового режущего узла 66b расположена под углом к оси 70a центрального дискового режущего узла 66а. Ось 70c верхнего дискового режущего узла 66с расположена под углом к осям 70a, 70b центрального дискового режущего узла 66а и нижнего дискового режущего узла 66b. Данное расположение дисковых режущих узлов 66 дает ровные заходки, когда врубовая головка 26 взаимодействует с забоем горной выработки. Дополнительные варианты осуществления могут включать в себя меньше или больше дисковых режущих узлов 66, расположенных в различных положениях.
Как показано на фиг.4, врубовая головка 26 также включает в себя демпфирующую массу 74, в виде тяжелого материала, такого как свинец, расположенного во внутреннем объеме врубовой головки 26, окружающем три отверстия 58. При трех эксцентричных снабженных приводом дисковых режущих узлах 66, на которые распределяется общий тяжелый вес, требуется уменьшенный общий вес и обеспечивается более легкое и более компактное конструктивное решение. В одном варианте осуществления приблизительно 6 тонн распределяется по трем дисковым режущим узлам 66. Установочное расположение выполнено с возможностью реагирования на усредненные силы, приложенные каждым дисковым режущим узлом 66, а пиковые силы резания абсорбируются демпфирующей массой 74, а не рычагом 30 (фиг.3) или другой опорной конструкцией. Масса каждого дискового режущего узла 66 значительно меньше демпфирующей массы 74.
Как показано на фиг.3, рычаг 30 включает в себя верхнюю часть 82 и нижнюю часть 86. Кронштейн 42 включает в себя фланец 94. Кронштейн 42 скрепляется с рычагом 30 любым подходящим способом, например, сварным соединением. Кронштейн 42 прикрепляется к врубовой головке 26 U-образными профилями 98. Каждый профиль 98 принимает фланец 54 врубовой головки и фланец кронштейна 94 для скрепления врубовой головки 26 с кронштейном 42. Эластичная муфта (не показано) устанавливается между врубовой головкой 26 и кронштейном 42 для изоляции вибраций врубовой головки от рычага 30.
Дисковые режущие узлы 66 приводятся в действие для перемещения в эксцентричном режиме своими двигателями. Данное выполняется, например, посредством привода дисковых режущих узлов с использованием приводного вала (не показано) с первым участком, образующим первую ось вращения и вторым участком, образующим вторую ось вращения, радиально смещенную от первой оси вращения. Величина эксцентричного перемещения является пропорциональной сумме радиального смещения между осью вращения каждого участка вала. В одном варианте осуществления величина смещения составляет несколько миллиметров, и дисковый режущий узел 66 приводится в эксцентричное движение с относительно небольшой амплитудой на высокой частоте, такой как приблизительно 3000 об/мин.
Эксцентричное перемещение дисковых режущих узлов создает воздействие на разрабатываемый минерал аналогичное воздействию молоткового перфоратора, обуславливая разрушение при растяжении горной породы, так что обломки горной породы смещаются от поверхности горной породы. В частности, действие дискового режущего узла 66 на поверхность снизу является аналогичным действию зубила, создающего растягивающие напряжения в хрупком материале, таком как горная порода, который эффективно разрушается при растяжении. Сила, требуемая для производства разрушения при растяжении в горной породе имеет величину на порядок меньше величины, требуемой от обычных врубовых головок с дисковыми шарошками для удаления равного объема горной породы. В некоторых вариантах осуществления дисковые режущие узлы 66 могут также нутировать, при этом ось вращения перемещается по синусоидальной траектории при вибрации дискового режущего узла 66. Для получения указанного режима ось, вокруг которой вращается приводной вал дискового режущего элемента, выполняется с угловым смещением от кожуха дискового режущего элемента. Как показано на фиг.2, гидромонитор 99 установлен смежно с передней стороной каждого дискового режущего узла 66 в положении для направления воды к породе. Гидромонитор 99 подает струю воды или другой текучей среды на разрабатываемую породу для содействия смещению и удалению разрушенной породы и локализации пыли, создаваемой во время разработки.
Горная машина 10 работает, продвигая рычаг 30 к породе (т.е. к разрабатываемому забою) и поворачивая рычаг 30 для вреза в породу. Во время работы нижний дисковый режущий узел 66b первым контактирует с породой, когда рычаг 30 поворачивается по часовой стрелке (на виде сверху рычага 30 на фиг.2). Когда нижний дисковый режущий узел 66b контактирует с породой, смещенная порода отпадает от разрабатываемого забоя. Центральный дисковый режущий узел 66а контактирует с породой после нижнего дискового режущего узла 66b, и порода, отбитая центральным дисковым режущим узлом 66а отпадает от разрабатываемого забоя через пространство, созданное нижним дисковым режущим узлом 66b. Аналогично, верхний дисковый режущий узел 66с взаимодействует с породой после центрального дискового режущего узла 66а, и отбитая порода, разрушенная верхним дисковым режущим узлом 66с падает на грунт или подошву горной выработки через пространство, созданное центральным дисковым режущим узлом 66а. Соответственно, поскольку дисковые режущие узлы 66 контактируют с породой от самого нижнего положения до самого верхнего положения, отбитая порода, произведенная опережающими дисковыми режущими элементами повторно не разрушается задними дисковым режущими элементами, что уменьшает износ на дисковых режущих узлах 66. В дополнение, дисковые режущие узлы 66 установлены так, что каждый дисковый режущий узел 66 производит разрушение породы на одинаковую глубину, что предотвращает возникновение неровностей в породе, которые могут препятствовать продвижению горной машины 10.
На фиг.5 показана часть вида сверху горной машины 10. Как схематично показано на фиг.5, рама 12 машины 10 включает в себя переднюю платформу 128 и заднюю платформу 130. Машина 10 также включает в себя один или несколько исполнительных механизмов 136 для перемещения передней платформы 128 вперед (например, к породе). В некоторых вариантах осуществления исполнительные механизмы 136 могут также перемещать заднюю платформу 130 вперед (например, к передней платформе 128). Например, в некоторых вариантах осуществления платформы 128 и 130 могут крепиться к подошве или грунту для создания опоры с использованием закрепляющей системы. Когда одна из платформ 128 и 130 закреплена, исполнительные механизмы 136 могут перемещать только незакрепленную платформу. Закрепляющая система может включать в себя бурильные блоки 144, скрепленные с каждой платформой 128 и 130, которые могут выдвигаться в подошву. В настоящей заявке исполнительный механизм может включать в себя гидравлический исполнительный механизм (например, гидравлические цилиндры или поршни), пневматический исполнительный механизм, электрический исполнительный механизм (например, с переключателем или реле, пьезоэлектрическим исполнительным механизмом или соленоидом), механический исполнительный механизм (например, винтовой или кулачковый исполнительный механизм), или механизм или систему другого типа для перемещения компонента горной машины.
В некоторых вариантах осуществления система перемещения породы может использоваться c горной машиной 10. Система перемещения породы может включать в себя скребки, вакуумную систему, дробилку или разрушитель породы с превышением по крупности, и конвейерную систему 145 (фиг.5). Система перемещения породы перемещает отбитую породу от разрабатываемого забоя. Части системы перемещения породы могут устанавливаться на горной машине 10 или вне машины. Например, конвейерная система 145 может устанавливаться под рычагом 30 и вдоль по меньшей мере одной стороны машины 10 для сбора и переноса разрушенной породы. Аналогично, вакуумная система может устанавливаться вне машины 10. Как описано более подробно ниже (см. фиг.8), некоторые компоненты системы перемещения породы могут управляться контроллером, включенным в состав горной машины 10. В частности, один или несколько контроллеров, включенных в состав горной машины 10, могут передавать команды в систему перемещения породы по проводной или беспроводной линии связи. В некоторых вариантах осуществления компоненты системы перемещения породы могут также управляться вручную локально или через блок дистанционного управления.
Как показано на фиг.5, рычаг 30 установлен на подвижной платформе или скользящей раме 168, которая скользит вдоль рельса (не показано) на передней платформе 128. Один или несколько исполнительных механизмов ("исполнительные механизмы 171 и 172 выдвижения") закреплены на передней платформе 128 и линейно перемещают подвижную платформу 168 вдоль рельса. Поэтому рычаг 30, который соединяется с подвижной платформой 168, может поступательно перемещаться относительно передней платформы 128. Положения исполнительных механизмов 171 и 172 выдвижения согласуются для предотвращения нештатного перекоса подвижной платформы 168. В некоторых вариантах осуществления выдвижение подвижной платформы 168 (т.е. выдвижение исполнительных механизмов 171 и 172) может иметь диапазон от 0 миллиметров (т.е. не выдвинут) до приблизительно 1500 миллиметров (т.е. полностью выдвинут). В описаниях, приведенных ниже, положение подвижной платформы 168 можно представлять, как выдвижение исполнительных механизмов 171 и 172. В некоторых вариантах осуществления каждый исполнительный механизм 171 и 172 выдвижения имеет ход приблизительно 200 миллиметров.
Рычаг 30 поворачивается горизонтально из стороны в сторону на поворотной оси 44 для вреза дисковых режущих узлов 66 в породу. В частности, рычаг 30 установлен на подвижной платформе 168 на поворотной оси 44 с использованием поворотного узла 132. Поворотный узел 132 включает в себя шарнир 133, который обеспечивает горизонтальный поворот рычага 30. Рычаг 30 поперечно поворачивается c использованием одного или нескольких исполнительных механизмов ("исполнительных механизмов 160 и 164 поворота"), которые соединены между рычагом 30 и подвижной платформой 168. Исполнительные механизмы 160 и 164 поворота могут выполняться с возможностью поворота рычага 30 по максимальной дуге, составляющей приблизительно 150 градусов. В некоторых вариантах осуществления машина 10 также включает в себя роторный исполнительный механизм, который вращает рычаг 30, что увеличивает угол поворота рычага и улучшает установку в нужное положение врубового устройства 22.
Рычаг 30 также перемещается вертикально от верха до низа (т.е. изменяется отметка рычага 30). Например, как показано на фиг.6 и 7, поворотный узел 132, который обеспечивает горизонтальный поворот рычага 30, может включать в себя дополнительный поворотный узел 204 который обеспечивает поворот или отклонение рычага 30 от вертикали. Поворотный узел 204 включает в себя раздельный опорный штырь 208, который включает в себя верхний штырь 209 и нижний штырь 210. Верхний штырь 209 прикрепляется к верху рычага 30 и нижний штырь 210 прикрепляется к низу рычага 30. Рычаг 30 устанавливается на верхний штырь 209 с помощью верхнего сферического подшипника 211 между кожухом 216 верхнего сферического подшипника и верхним штырем 209, и рычаг 108 устанавливается на нижний штырь 210 с помощью нижнего сферического подшипника 213 между кожухом нижнего сферического подшипника и нижним штырем 210. Каждый из кожухов 216 и 224 сферических подшипников удерживается неподвижно относительно платформы 168 рычага в приемных гнездах 228 и 232, как показано схематично на фиг.7.
Для перемещения рычага 30 вертикально сверху вниз (т.е. наклона врубового устройства 22), рычаг 234 прикрепляется к кожуху нижнего сферического подшипника 224 (см. фиг.6). Штырь 236 прикрепляется к рычагу 234 и шарнирно прикрепляется своим основанием к платформе 168 рычага. Как показано на фиг.6, один или несколько исполнительных механизмов ("исполнительный механизм 237 наклона") соединяются между верхом штыря 236 и подвижной платформой 168 для наклона кожуха нижнего сферического подшипника 224 и, следовательно, поворота в шарнире или наклона рычага 30. Идентичные рычаг и штырь, прикрепленные к подвижной платформе 168 также прикрепляются к противоположной стороне кожуха 224 нижнего сферического подшипника, создавая неподвижную поворотную точку для поворотного узла 204. В некоторых вариантах осуществления исполнительный механизм 237 наклона может отклонять рычаг 30 приблизительно на 1,5 градуса вверх и вниз от горизонтального положения рычага 30.
Поэтому, в некоторых вариантах осуществления горная машина 10 включает в себя многочисленные исполнительные механизмы для установки в требуемое положение и перемещения рычага 30. В частности, исполнительные механизмы 160 и 164 поворота используются для качания или поворота рычага 30, исполнительные механизмы 171 и 172 выдвижения используются для выпуска и втягивания рычага 30, и исполнительный механизм 237 наклона используется для наклона или выставления по вертикали рычага 30. Должно быть понятно, что можно использовать дополнительные исполнительные механизмы или можно использовать меньше исполнительных механизмов для выполнения конкретного перемещения рычага 30. Когда исполнительные механизмы включают в себя один или несколько гидравлических исполнительных механизмов, каждый гидравлический исполнительный механизм может оборудоваться линейно регулируемыми дифференциальными измерительными преобразователями ("LVDT") или другими датчиками, передающими сигналы положения хода исполнительного механизма, и датчиками давления. Каждый гидравлический исполнительный механизм можно также оборудовать либо пропорциональными клапанами или клапаном выдержки нагрузки для блокирования исполнительного механизма в нужном положении, когда механизм выключен. Когда используются не гидравлические исполнительные механизмы, такие исполнительные механизмы могут включать в себя датчики и устройства для передачи аналогичной информации о состоянии исполнительного механизма и для блокирования исполнительного механизма в конкретном положении.
Горная машина 10 также включает в себя систему управления, управляющую работой горной машины 10. Как описано более подробно ниже, система управления выполняет некоторые операции горной машины 10 автоматически, не требуя взаимодействия с оператором. В общем, система управления может запускать автоматизированную последовательность автоматически или в ответ на команду оператора (например, с блока дистанционного управления оператора). После инициирования автоматизированной работы система управления выполняет автоматизированную последовательность не требуя взаимодействия с оператором.
На фиг.8 схематично показана система 250 управления горной машины 10 согласно одному варианту осуществления изобретения. Как показано на фиг.8, система 250 включает в себя по меньшей мере один контроллер 252. В частности, система 250 управления включает в себя первый контроллер 252a (т.е. "контроллер 1"), второй контроллер 252b (т.е. "контроллер 2") и третий контроллер 252c (т.е. "контроллер 3").
В некоторых вариантах осуществления первый контроллер 252a управляет перемещением по выработке машины 10 на гусеницах 24 и управляет системой 25 стабилизации. Первый контроллер 252a может также поддерживать связь с блоком дистанционного управления. В дополнение, в некоторых вариантах осуществления первый контроллер 252a управляет одним или несколькими насосами, приводящими в действие по меньшей мере некоторые исполнительные механизмы и/или двигатели в горной машине 10. Второй контроллер 252b может управлять дисковыми режущими узлами 66 (например, двигателями режущих узлов) и перемещением рычага 30 (например, исполнительными механизмами 160 и 164 поворота, исполнительными механизмами 171 и 172 выдвижения, и исполнительным механизмом 237 наклона). Второй контроллер 252b может также управлять индикаторами, установленными на машине 10 или выносными, дающими информацию (например, визуальную, звуковую и т.д.) операторам и другому персоналу. В дополнение, второй контроллер 252b может управлять вакуумной системой и поддерживать связь с блоком дистанционного управления и другими выносными системами и устройствами. В некоторых вариантах осуществления третий контроллер 252c управляет связью между горной машиной 10 и наружными устройствами и системами (например, вводом/выводом выдвижения машины). Должно быть понятно, что функции, выполняемые контроллерами 252, можно объединить в одном контроллере или распределить среди дополнительных контроллеров. Аналогично, система 250 управления может включать в себя дополнительные выносные контроллеры 252 горной машины 10. Три контроллера 252, показанные на фиг.8, и их соответствующая функциональность являются одним примером конфигурации системы 250.
Контроллеры 252 поддерживают связь через системную шину 254. Как показано на фиг.8, другие компоненты горной машины 10 также соединяются с шиной 254 и осуществляют связь через нее. В частности, исполнительные механизмы 255 включенные в состав машины 10 соединяются с шиной 254 и могут осуществлять связь (например, принимать команды и передавать информацию) с контроллерами 252. Исполнительные механизмы 255 могут включать в себя исполнительные механизмы 136 для перемещения передней и/или задней платформ 128 и 130, исполнительные механизмы 160 и 164 поворота, исполнительные механизмы 171 и 172 выдвижения и исполнительный механизм 237 наклона. В некоторых вариантах осуществления контроллеры 252 передают рабочие команды на исполнительные механизмы 255 и могут принимать информацию положения и давления с исполнительных механизмов 255 (например, с линейно регулируемого дифференциального измерительного преобразователя, связанного с каждым исполнительным механизмом 255) через шину 254.
Двигатели 256 привода дисковых режущих узлов 66 (т.е. "двигатели врубовой головки") и/или гусениц 24 также соединены с шиной 254 и имеют связь с контроллерами 252. В дополнение, насосный блок 257 соединяется с шиной 254 и связывается с контроллерами 252. Как описано более подробно ниже, насосный блок 257 подает масло по меньшей мере в некоторые исполнительные механизмы и двигатели в горной машине 10. В частности, насосный блок 257 может включать в себя трехкомпонентный основной насосный блок, который управляет двигателями и исполнительными механизмами, связанными с перемещением гусениц 24 и рычага 30 (например, исполнительные механизмы 160 и 164 поворота, исполнительные механизмы 171 и 172 выдвижения, и исполнительный механизм 237 наклона). В некоторых вариантах осуществления насосный блок 257 также управляет водяным насосом и подает масло для гидростатического подшипника к дисковым режущим узлам 66. Кроме того, в некоторых вариантах осуществления насосный блок 257 управляет различными исполнительными механизмами и исполнительными механизмами, включенными в систему 25 стабилизации.
Контроллеры 252 могут также поддерживать связь с различными индикаторами 258 машины, такими как световая, звуковая тревожная сигнализация и соответствующие дисплеи, включенные в состав горной машины 10. Индикаторы 258 используются для передачи информации операторам и персоналу. Горная машина 10 может также включать в себя приемопередатчик 260, который обеспечивает горной машине 10 передачу и прием данных (например, команд, записей, рабочих параметров и т.д.) на и с выносных компонентов горной машины 10. Например, контроллеры 252 могут использовать приемник 260 для поддержания связи с блоком 261 дистанционного управления (например, ручным пультом дистанционного управления) и другими внешними системами мониторинга или управления, такими как система диспетчерского управления и сбора данных ("SCADA"). В частности, в некоторых вариантах осуществления оператор может выдавать команды горной машине 10 с использованием блока 261 дистанционного управления. Блок 261 дистанционного управления может включать в себя радиопередатчик, кабель с разъемными соединениями, или то и другое. Блок 261 дистанционного управления обеспечивает инициирование оператором различных операций горной машины 10, такое как включение и выключение машины 10, остановка машины 10, пуск и остановка различных компонентов и систем машины 10, стабилизация машины 10, инициирование автоматизированных операций, инициирование работы с ручным управлением и остановка работы машины 10. Контроллеры 252 могут также использовать приемопередатчик 260 для поддержания связи с системой 262 перемещения породы, которая включает в себя вакуумную систему 264 и конвейерную систему 145.
Как показано на фиг.8, система 266 сбора данных может также соединяться с шиной 254 и может собирать и регистрировать данные работы машины на машиночитаемом носителе. Машиночитаемый носитель может являться съемным или переносным для обеспечения просмотра данных на персональном компьютере (например, портативном компьютере, карманном персональном компьютере, смартфоне, планшетном компьютере, и т.д.). Система 266 сбора данных может также выполняться с возможностью передачи данных по сетевому соединению (например, соединению локальной сети), кабелю (кабелю универсальной последовательной шины ("USB"), или проводным или беспроводным соединениям других типов. В некоторых вариантах осуществления система 266 сбора данных автоматически запускает сбор данных, когда резание выполняется горной машиной 10 и автоматически останавливает сбор данных, когда резание прекращается.
Кроме того, контроллеры 252 могут поддерживать связь с другими системами, датчиками и компонентами горной машины 10 для мониторинга и/или управления. Например, как показано на фиг.8, контроллеры 252 могут поддерживать связь с множеством датчиков 267, дающих информацию, касающуюся работы машины 10. Датчики 267 могут включать в себя датчики тока двигателя, температурные датчики, релейные датчики, датчики параметров масла, датчики положения, датчики давления и т.д. Датчики 267 дают информацию, касающуюся температуры масла, положения исполнительного механизма, давления масла в подшипнике, обнаруженной воды, и т.д. Как описано более подробно ниже, контроллеры 252 используют информацию с датчиков 267 для автоматического управления машиной 10.
На фиг.9a-c схематично показаны контроллеры 252. Как показано на фиг.9a-c, каждый контроллер 252 включает в себя процессор 270, машиночитаемые носители 272, и интерфейс 274 ввода/вывода данных. Должно быть понятно, что в некоторых вариантах осуществления контроллеры 252 включают в себя многочисленные процессоры 270, модули 272 машиночитаемых носителей и/или интерфейсы 274 ввода/вывода данных. Также в некоторых вариантах осуществления компоненты каждого из контроллеров 252 отличаются (например, контроллер 1 включает в себя дополнительные компоненты по сравнению с контроллером 2). В некоторых вариантах осуществления каждый контроллер 252 заключен в прочный пыленепроницаемый корпус.
Процессор 270 считывает и исполняет инструкции, сохраненные в машиночитаемых носителях 272. Процессор 270 также сохраняет данные на машиночитаемых носителях 272. Машиночитаемые носители 272 включает в себя несъемный машиночитаемый носитель и включает в себя энергозависимое запоминающее устройство, энергонезависимое запоминающее устройство (например, флэш-память), или их комбинацию. Интерфейс 274 ввода/вывода данных принимает информацию с внешних устройств контроллера 252 (например, от шины 254) и выдает информацию на внешние устройства контроллера 252 (например, на шину 254). В некоторых вариантах осуществления интерфейс 274 ввода/вывода данных также сохраняет данные, принятые с внешних устройств контроллера 252 на машиночитаемые носители 272 и, аналогично, считывает данные с машиночитаемых носителей 272 для выдачи на внешние устройства контроллера 252.
Инструкции, сохраняемые в машиночитаемых носителях 272 каждого контроллера 252 выполняют конкретную функцию при исполнении процессором 270. Например, как описано более подробно ниже, контроллеры 252 исполняют инструкции для выполнения различных автоматизированных операций горной машины. В частности, как описано более подробно ниже, контроллеры 252 могут управлять горной машиной для автоматического (т.е. не требующего с ручного управления от оператора) выполнения операций по подготовке к перемещению в выработке, операции обнаружения разрабатываемого забоя, операций резания, операций остановки резания, и операций остановки работы. Как часть данных операций, контроллеры 252 автоматически управляют исполнительными механизмами 255, двигателями 256, насосным блоком 257, приемопередатчиком 260, индикаторами 258 и другими компонентами и системами, связанными с горной машиной 10. Контроллеры 252 могут также поддерживать связь с системой 262 перемещения породы, системой подачи воды и электрической системой, связанными с горной машиной 10 во время данных автоматизированных операций.
Работа машины
Для пуска машины 10 оператор включает размыкатель подачи электропитания. Оператор или инженер затем проверяет различные рабочие параметры машины 10 (например, с использованием системы диспетчерского управления и сбора данных). рабочие параметры могут включать в себя скорость наклона, скорости выдвижения и втягивания, скорость поворота, глубину вруба, максимальный угол поворота рычага, приращение корректировки наклона, параметры автоматического резания и положения резания и поворота. После проверки параметров оператор может активировать блок 261 дистанционного управления и инициировать команду с блока 261 дистанционного управления на пуск насосного блока 257. В некоторых вариантах осуществления тревожный сигнал звучит приблизительно 10 секунд перед пуском насоса 257 для предупреждения персонала о пуске машины 10. В некоторых вариантах осуществления система 250 управления также проверяет находятся ли в рабочем состоянии блокировки цепи, связанные с насосным блоком 257 перед пуском насоса 257. Если блокировки цепи находятся в рабочем состоянии, система 250 управления запускает двигатель, связанный с насосным блоком 257. При работающем насосном блоке 257 оператор может перемещать по выработке, наклонять и поворачивать машину 10 в требуемое положение с использованием блока 261 дистанционного управления.
Подготовка к перемещению по выработке
После пуска машины 10, но до перемещения машины 10 по выработке рычаг 30 устанавливается в заданное положение для безопасного перемещения по выработке машины 10. Данную операцию обычно называют "подготовкой к перемещению по выработке". Система 250 управления может автоматически выполнять подготовку к перемещению по выработке. В частности, как указано выше и показано на фиг.9a-c, контроллеры 252 включают в себя программное обеспечение, хранящееся в машиночитаемых носителях 272 и исполняемое процессором 270 для выполнения различных автоматизированных операций горной машины 10. В некоторых вариантах осуществления программное обеспечение включает в себя инструкции для выполнения автоматизированной операции подготовки к перемещению по выработке. На фиг.10a-b показаны дополнительные детали автоматизированной операции подготовки к перемещению по выработке.
Автоматизированную операцию подготовки к перемещению по выработке можно инициировать с помощью ручного управления или автоматически. Для инициирования операции с помощью ручного управления оператор может выбрать функцию или кнопку операции подготовки к перемещению по выработке в блоке 261 дистанционного управления, и блок 261 дистанционного управления может передать команду "инициирование" в систему 250 управления. Как описано ниже, система 250 управления может также автоматически инициировать операцию подготовки к перемещению по выработке во время автоматизированной операции резания (см. фиг.12f).
После того как автоматизированная операция подготовки к перемещению по выработке инициирована (позиция 299), система 250 управления выполняет автоматизированную операцию, не требующую взаимодействия с ручным управлением. В частности, как показано на фиг.10a, система 250 управления определяет, обнаружен ли разрушаемый забой (позиция 300). Данную операцию обычно называют "обнаружения разрабатываемого забоя", и операция может включать в себя совмещение платформы 168 и рычага 30 с разрабатываемым забоем. Координаты разрабатываемого забоя можно затем определять на основе положения (например, выдвижения, угла поворота и наклона) совмещенной платформы 168 и рычага 30.
Обнаружение разрабатываемого забоя
Система 250 управления может выполнять автоматизированную операцию обнаружения разрабатываемого забоя. В частности, как указано выше и показано на фиг.9a-c, контроллеры 252 включают в себя программное обеспечение, хранящееся в машиночитаемых носителях 272 и исполняемое процессором 270 для выполнения различных автоматизированных операций горной машины 10. В некоторых вариантах осуществления программное обеспечение включает в себя инструкции для выполнения автоматизированной операции обнаружения разрабатываемого забоя. Для инициирования автоматизированной операции обнаружения разрабатываемого забоя, оператор может выбрать функцию или кнопку нахождения разрабатываемого забоя в блоке 261 дистанционного управления, и блок 261 дистанционного управления может передать команду «инициирование» в систему 250 управления. Также в некоторых вариантах осуществления система 250 управления автоматически инициирует операцию обнаружения разрабатываемого забоя. Например, система 250 управления может автоматически инициировать автоматизированную операцию обнаружения разрабатываемого забоя, как часть автоматизированной операции подготовки к перемещению по выработке, если разрушаемый забой еще не обнаружен (позиция 300, см. фиг.10a). На фиг.11а-с показаны дополнительные детали автоматизированной операции обнаружения разрабатываемого забоя.
После того как автоматизированная операция обнаружения разрабатываемого забоя инициирована (позиция 301), система 250 управления выполняет операцию, не требующую взаимодействия с ручным управлением. В частности, как показано на фиг.11a, система управления определяет отключены или установлены блокировки машины (позиция 302). Если блокировки сработали или установлены (т.е. не "в норме"), в любое время в процессе операции обнаружения разрабатываемого забоя система 250 управления заканчивает автоматизированную операцию обнаружения разрабатываемого забоя. Если блокировки не сработали или не установлены (т.е. "в норме") (позиция 302), система 250 управления устанавливает подвижную платформу 168 и рычаг 30 в заданное положение для пуска. Заданное положение для пуска может включать в себя положение выдвижения для пуска и положение поворота для пуска. В некоторых вариантах осуществления заданное положение для пуска также включает в себя положение наклона для пуска.
В частности, как показано на фиг.11a, если блокировки в норме (позиция 302), система 250 управления автоматически управляет исполнительным механизмом 237 наклона для наклона рычага 30 в положение для пуска (позиция 304). Наклон или выставление по вертикали рычага 30 помогает горной машине 10 выполнять отбойку вдоль угольного пласта или жилы с помощью совмещения дисковых режущих узлов 66 с жилой. Поэтому, положение рычага по вертикали должно поддерживаться от одной заходки к другой для обеспечения эффективности выполнения резания. В некоторых вариантах осуществления отклонение от вертикали для пуска составляет приблизительно 135 миллиметров, но данное значение можно изменять на основе профиля конкретной отбиваемой жилы и параметров горной машины 10. Положение наклона для пуска можно определить как угол, образуемый с вертикалью, задаваемой рычагом 30 в положении без наклона, где миллиметры представляют выдвижение исполнительного механизма 237 наклона, или как смещение от вертикали задаваемой рычагом 30 в положении без наклона. В некоторых вариантах осуществления положение наклона для пуска является одинаковым с положением наклона для резания, описанным ниже для автоматизированной операции резания (см. фиг.12a-12g).
Когда рычаг 30 достигает положение наклона для пуска и когда блокировки остаются нормальными (позиция 302 и 308), система 250 управления автоматически управляет исполнительными механизмами 171 и 172 выдвижения подвижной платформы 168 в положение выдвижения для пуска (позиция 310). В некоторых вариантах осуществления положение выдвижения для пуска является минимальным ходом или выдвижением исполнительных механизмов 171 и 172 выдвижения, при котором может проходить резание (например, 1100 миллиметров). Положение выдвижения для пуска может являться одинаковым с положением выдвижения для резания, описанным ниже для автоматизированной операции резания (см. фиг.12a-12g).
Когда платформа 168 расположена в пределах положения выдвижения для пуска (например, выдвинута от приблизительно 1097 миллиметров до приблизительно 1103 миллиметра), (позиция 312) и при этом блокировки остаются нормальными (позиция 308 и 314, см. фиг.11b), система 250 управления автоматически управляет исполнительными механизмами 160 и 164 поворота, поворачивающими рычаг 30 в положение поворота для пуска (позиция 316). В некоторых вариантах осуществления положение поворота для пуска получается при повороте приблизительно на 90 градусов (т.е. в положение приблизительно параллельное продольной оси 25 рамы 12 горной машины 10), то есть угол поворота, при котором глубина вруба максимальна. В других вариантах осуществления положение поворота для пуска является тождественным положению поворота для резания, описанному ниже для автоматизированной операции резания (см. фиг.12a-12g).
Когда рычаг 30 расположен в пределах положения поворота для пуска (например, приблизительно в пределах 1 градуса от положения поворота для пуска) (позиция 318), и при этом блокировки остаются нормальными (позиция 314 и 320), система 250 управления обнаруживает разрушаемый забой относительно заданного положения для пуска. В частности, система 250 управления автоматически управляет исполнительными механизмами 171 и 172 выдвижения подвижной платформы 168 (например, с установленной скоростью) до касания одним из дисковых режущих узлов 66 (т.е. "обнаруживает") разрушаемый забой (позиция 322). В частности, система 250 управления управляет исполнительными механизмами 171 и 172 выдвижения врубовой головки 26 к разрабатываемому забою до входа в контакт центрального дискового режущего узла 66а с разрабатываемым забоем. Система 250 управления также продолжает продвигать платформу 168 (и следовательно врубовую головку 26) к разрабатываемому забою до превышения заданного порога физической силой, действующей между врубовой головкой 26 и разрабатываемым забоем. Когда физическая сила достигает или превышает заданный порог, врубовая головка 26 устанавливается надлежащим образом на разрушаемом забое для определения по меньшей мере одной координаты разрабатываемого забоя на основе положений рычага 30 и/или платформы 168.
В некоторых вариантах осуществления система 250 управления не напрямую измеряет физическую силу, действующую между врубовой головкой 26 и разрабатываемым забоем. В частности, параметры исполнительных механизмов 171 и 172 выдвижения могут создавать один или несколько индикаторов физической силы, действующей между врубовой головкой 26 и разрабатываемым забоем. Система 250 управления может определять, равны ли данные индикаторы или превосходят заданное значение для непрямого определения, достигла ли физическая сила, действующая между врубовой головкой 26 и разрабатываемым забоем, заданного порога. Например, если исполнительные механизмы 171 и 172 выдвижения включают в себя гидравлические цилиндры, система 250 управления может использовать значение давления исполнительных механизмов 171 и 172, как индикатор физической силы, действующей между врубовой головкой 26 и разрабатываемым забоем. В частности, система 250 управления может продвигать платформу 168 к разрабатываемому забою до нагнетания давления в исполнительных механизмах 171 и 172 выдвижения до заданного значения (например, 120 бар (12 МПа). Система 250 управления может иметь аналогичное значение давления, как индикатора физической силы, действующей между врубовой головкой 26 и разрабатываемым забоем, когда исполнительные механизмы 171 и 172 включают в себя пневматические исполнительные механизмы. В других вариантах осуществления, система 250 управления может использовать параметры тока, питающего исполнительные механизмы 171 и 172, значение силы, действующей между компонентами исполнительных механизмов 171 и 172, или физическое положение компонентов исполнительных механизмов 171 и 172 как индикатор физической силы, действующей между врубовой головкой 26 и разрабатываемым забоем. Другие компоненты машины 10, такие как поворотные исполнительные механизмы 160 и 164, цилиндр 237 наклона и датчики 267 могут также создавать один или несколько индикаторов физической силы, действующей между врубовой головкой 26 и разрабатываемым забоем.
Когда индикатор физической силы, действующей между врубовой головкой 26 и разрабатываемым забоем становится равным заданному значению или превосходит его (позиция 324), система 250 управления сохраняет по меньшей мере одну координату разрабатываемого забоя на основе текущих положений исполнительного механизма 237 наклона, исполнительных механизмов 171 и 172 выдвижения и/или исполнительных механизмов 160 и 164 поворота (например, на машиночитаемом носителе одного из контроллеров 252) (позиция 325). В некоторых вариантах осуществления координаты получают для положения выдвижения на забой, положения поворота на забой и положения наклона на забой. Положения выдвижения на забой основано на положении подвижной платформы 168, положение поворота на забой основано на угле поворота рычага 30, и положение наклона на забой основано на наклоне рычага 30. В частности, положения выдвижения на забой может основываться на выдвижении или ходе исполнительных механизмов 171 и 172 выдвижения. Аналогично, положение поворота на забой может основываться на выдвижение или ходе исполнительных механизмов 160 и 164 поворота, и положение наклона на забой может основываться на выдвижении или ходе исполнительного механизма 237 наклона. Соответственно, координаты разрабатываемого забоя можно точно определить исходя из хода исполнительных механизмов 171 и 172 выдвижения, угла поворота рычага 30, и хода исполнительного механизма 237 наклона, когда центр дискового режущего узла 66а касается разрабатываемого забоя.
После сохранения координат разрабатываемого забоя (позиция 325) и когда блокировки остаются нормальными (позиция 326), система 250 управления автоматически управляет исполнительными механизмами 171 и 172 выдвижения для втягивания подвижной платформы 168 от идентифицированного разрабатываемого забоя на заданное расстояние отвода (например, для предотвращения трения дисковых режущих узлов 66 по разрабатываемому забою, когда рычаг 30 поворачивается) (позиция 328). В некоторых вариантах осуществления расстояние отвода составляет от приблизительно 20 миллиметров до приблизительно 35 миллиметров. Когда подвижная платформа 168 расположена в пределах расстояния отвода (например, в пределах 2 мм от расстоянии отвода) (позиция 330), и при этом блокировки остаются нормальными (позиция 332), система 250 управления автоматически приводит в действие исполнительные механизмы 160 и 164 поворота для поворота рычага 30 в заданное положение поворота для резания (например, с заданной скоростью поворота) (позиция 334). Положение поворота для резания может являться углом поворота рычага 30 при котором начинаются все врубы, выполняемые горной машиной 10. Когда рычаг 30 расположен в пределах положения поворота для резания (например, в пределах 1 градуса от положение поворота для резания) (позиция 336), операция обнаружения разрабатываемого забоя заканчивается.
После сохранения координат разрабатываемого забоя, система 250 управления (и/или другие системы управления, включенные в состав или внешние по отношению к горной машине 10) могут получить доступ к координатам с машиночитаемого носителя. Например, система 250 управления может получить доступ к координатам при начале нового вруба разрабатываемого забоя и при подготовке к перемещению по выработке машины 10. Система 250 управления может также иметь доступ к сохраненным координатам, если координаты потеряны (например, во время отключения электропитания во время вруба). Как описано ниже более подробно, после выполнения вруба система 250 управления также обновляет сохраненные координаты разрабатываемого забоя, учитывая глубину вруба.
В некоторых вариантах осуществления система 250 управления может обозначать сохраненные координаты либо как координаты, найденные с применением ручного управления или автоматически. Например, система 250 управления может раздельно сохранять найденные с применением ручного управления координаты и найденные автоматически координаты. В дополнение, если операция обнаружения разрабатываемого забоя выполняется с ручным управлением, система 250 управления может сохранять найденные при обнаружении разрабатываемого забоя с применением ручного управления координаты и может переустанавливать найденные автоматически координаты (например, с помощью установки найденных автоматически координат на ноль или другое принимаемое по умолчанию или недействительное значение) и наоборот. Переустановка найденных автоматически координат, когда выполняется операция с ручным управлением обнаружения разрабатываемого забоя и наоборот предотвращает использование системой 250 управления недействительных координат для разрабатываемого забоя.
Возвращаясь к показанному на фиг.10a и автоматизированной операции подготовки к перемещению в выработке, когда разрушаемый забой обнаружен (позиция 300), система 250 управления определяет в норме ли блокировки (позиция 350). Если блокировки не в норме в любое время в процессе автоматизированной операции подготовки к перемещению по выработке система 250 управления заканчивает автоматизированную операцию подготовки к перемещению по выработке. Если блокировки в норме, система 250 управления автоматически управляет исполнительными механизмами 171 и 172 выдвижения для втягивания подвижной платформы 168 на заданное расстояние зазора. Зазор может составлять приблизительно 50 миллиметров от разрабатываемого забоя. Например, система 250 управления может проводить выборку сохраненных координат разрабатываемого забоя из памяти и может втягивать подвижную платформу 158 на заданный зазор на основе таких координат. В частности, система 250 управления может втягивать подвижную платформу 168 приблизительно на 50 миллиметров от сохраненного положения выдвижения на забой. Отвод платформы 168 на величину зазора предотвращает контакт дисковых режущих узлов 66 с разрабатываемым забоем и их трение по нему, когда рычаг 30 поворачивается во время подготовки к перемещению по выработке.
Когда подвижная платформа 168 достигает зазора (например, значения в пределах приблизительно 2 миллиметров от зазора) (позиция 354) и если блокировки остаются нормальными (позиция 350 и 356, см. фиг.10b), система 250 управления поворачивает рычаг 30 в заданное положение для перемещения по выработке (позиция 358). В некоторых вариантах осуществления положение для перемещения по выработке составляет приблизительно 90 градусов. Вместе с тем, положение для перемещения по выработке может устанавливаться на любой угол, предотвращающий трение врубовой головки 26 по разрабатываемому забою, когда машина 10 перемещается по выработке. Положение для перемещения по выработке можно также выбирать для помощи перемещения центра тяжести горной машины как можно дальше назад, что помогает стабилизировать машину 10 во время перемещения по выработке.
Когда рычаг 30 достигает положения для перемещения по выработке и блокировки остаются нормальными (позиция 356 и 362), система 250 управления автоматически приводит в действие исполнительные механизмы 171 и 172 выдвижения для отвода подвижной платформы 168 в заданное положение выдвижения для резания (позиция 364). В некоторых вариантах осуществления положение выдвижения для резания является минимальным выдвижением исполнительных механизмов 171 и 172 выдвижения, при котором резание может начинаться (например, от приблизительно 1097 миллиметров до приблизительно 1103 миллиметра). Когда подвижная платформа 168 расположена в пределах положения выдвижения для резания (например, в положении выдвижения для резания или с его превышением) (позиция 366), автоматизированная операция подготовки к перемещению в выработке заканчивается.
После подготовки машины 10 к перемещению по выработке машина 10 может безопасно перемещаться по выработке (например, в положение для пуска резания). Для перемещения по выработке машины 10 вперед или назад оператор может нажать одну или комбинацию кнопок и привести в действие джойстик на блоке 261 дистанционного управления в требуемом направлении (т.е. дать команду "перемещение по выработке вперед" или "перемещение по выработке назад"). Когда оператор дает команду перемещения по выработке вперед или перемещения по выработке назад, гусеницы 24 снимаются с тормозов и двигатели приводят гусеницы 24 в движение в направлении команды. Система 250 управления согласует скорость движения гусениц 24 для предотвращения нештатного качания машины 10 и для точного направления машины 10. В некоторых вариантах осуществления, если разность скоростей двух гусениц 24 превышает заданное значение для заданного времени, система 250 управления автоматически отключает перемещение по выработке.
В некоторых вариантах осуществления машина 10 может оборудоваться лазерным датчиком расстояния, выполненным с возможностью измерения расстояния от врубовой головки 26 до разрабатываемого забоя. Если машина 10 перемещается по выработке слишком близко к разрабатываемому забою, система 250 управления автоматически отключает горизонтальный поворот рычага 30 для предотвращения повреждения дисковых режущих узлов 66. Также, в некоторых вариантах осуществления, когда оператор управляет перемещением по выработке машины 10 к разрабатываемому забою, система 250 управления может автоматически отключать перемещение по выработке, если машина 10 (например, врубовая головку 26) подходит ближе заданного минимального расстояния к разрабатываемому забою.
В некоторых вариантах осуществления система 250 управления также выполняется с возможностью проведения автоматизированного перемещения по выработке (т.е. "автоматически перемещаться по выработке" или " автоматического перемещения по выработке ") и оператор может включать или отключать функцию автоматического перемещения по выработке. В некоторых вариантах осуществления оператор задействует автоматическое перемещение по выработке, обеспечивая с помощью системы 250 управления автоматическое перемещение по выработке машины 10, когда исполнительные механизмы 171 и 172 выдвижения достигают заданного максимального выдвижения во время автоматизированной операции резания. Когда функция автоматического перемещения по выработке активируется, система 250 управления перемещает по выработке машину 10 вперед с заданной скоростью перемещения по выработке на заданное расстояние перемещения по выработке и затем автоматически останавливает. В некоторых вариантах осуществления после автоматического перемещения по выработке машина 10 стабилизируется (например, в режиме ручного управления или автоматически) перед возобновлением резания.
Резание
После перемещения машины 10 по выработке (например, в положение пуска), система 250 управления может выполнять автоматизированную операцию резания (т.е. "автоматическое резание"). В частности, как указано выше и показано на фиг.9a-c, контроллеры 252 включают в себя программное обеспечение, хранящееся в машиночитаемых носителях 272 и исполняемое процессором 270 для выполнения различных автоматизированных операций горной машины 10. В некоторых вариантах осуществления программное обеспечение включает в себя инструкции для выполнения автоматизированной операции резания. Автоматизация цикла резания требует минимального взаимодействия с оператором и уменьшает риски, связанные с операцией горной проходки. Во время автоматизированной операции резания машина 10 работает автономно под управлением системы 250 управления и не требует взаимодействия с ручным управлением. Система 250 управления вместе с тем может принимать команды и данные (например, по беспроводному каналу) с блока 261 дистанционного управления или выносного поста оператора (например, диспетчерского управления и сбора данных), останавливающие или блокирующие автоматизированную операцию резания. Система 250 управления также принимает данные (например, через шину 254), которые система 250 управления использует для корректировки или окончания последовательности автоматизированного резания на основе текущих рабочих параметров горной машины 10. В частности, в некоторых вариантах осуществления система 250 управления ведет непрерывный мониторинг параметров работы машины 10 и останавливает или прекращает автоматизированную операцию резания в случае отказа системы, или если параметры работы выходят за установленные пределы. Также система управления 20 может только обеспечивать разрушение породы, если машина 10 стабилизирована (например, с использованием системы 25 стабилизации) и обнаружения разрабатываемого забоя (см. операция обнаружения разрабатываемого забоя, описано выше, показано на фиг.11а-с). Кроме того, система 250 управления прекращает автоматизированную операцию резания, если оператор дает команду прекращения с блока 261 дистанционного управления.
Для инициирования с помощью ручного управления автоматизированной операции резания оператор может выбрать функцию или кнопку начала резания в блоке 261 дистанционного управления, и блок 261 дистанционного управления может передать команду «инициирования» в систему 250 управления. В некоторых вариантах осуществления, когда оператор выбирает функцию начала резания, система 266 сбора данных автоматически запускается (например, на основе команды из блока 261 дистанционного управления и/или системы 250 управления) для ведения мониторинга и регистрации операции резания. В некоторых вариантах осуществления система 250 управления может также автоматически инициировать автоматизированную операцию резания (например, после автоматического перемещения по выработке машины 10 для перестановки машины 10 для новой последовательности резания). На фиг.12a-g показаны дополнительные детали автоматизированной операции резания.
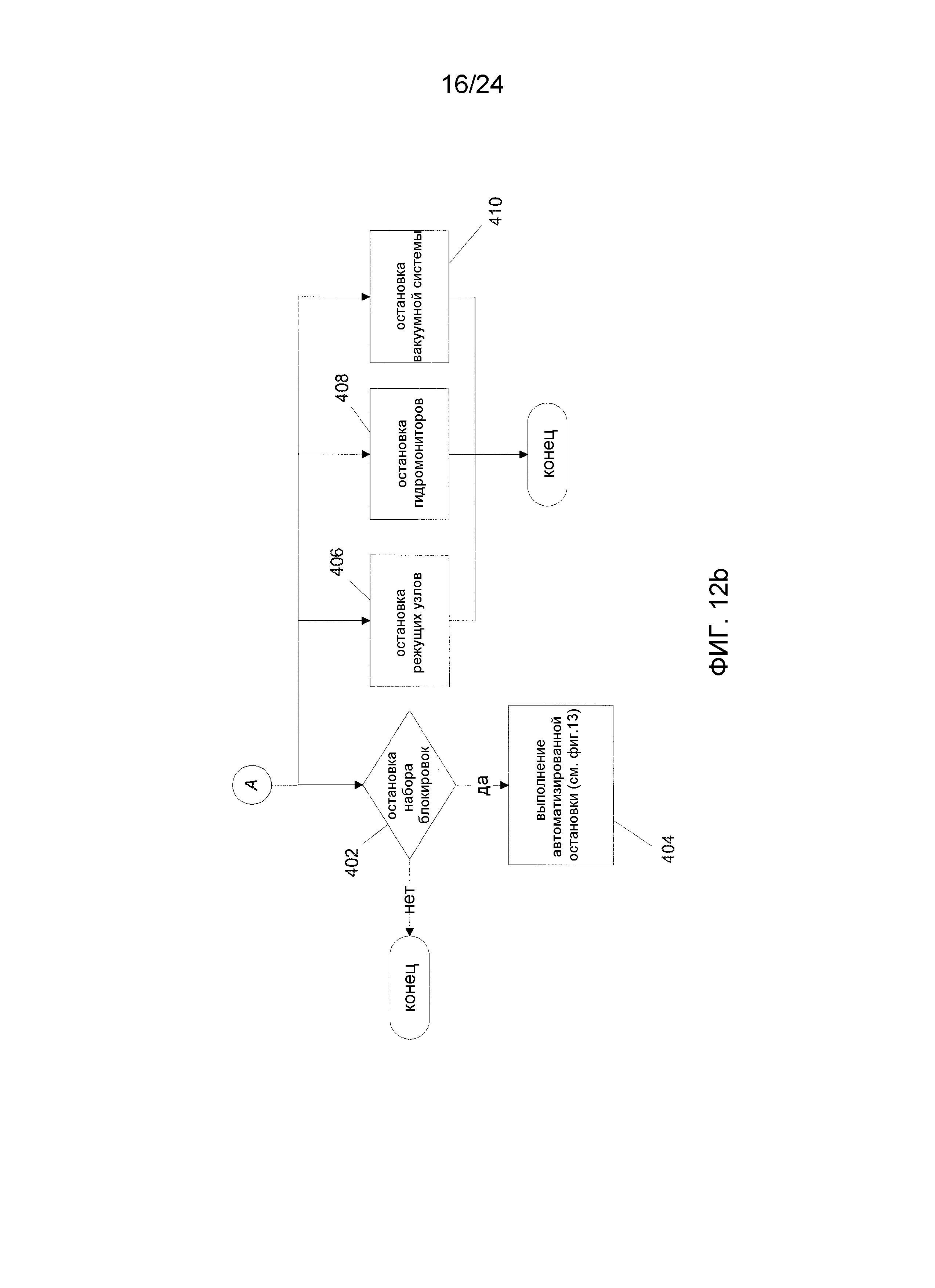
Как показано на фиг.12a, после инициирования автоматизированной операции резания (позиция 400), система 250 управления (например, второй контроллер 252b) определяет, в норме ли блокировки (позиция 401). Если блокировки не в норме, в любое время в процессе автоматизированной операции резания система 250 управления заканчивает автоматизированную операцию резания, как показано на фиг.12b. В частности, для окончания автоматизированной операции резания система 250 управления определяет, установлена ли останавливающая блокировка (позиция 402). В некоторых вариантах осуществления останавливающая блокировка устанавливается, когда резание начато, но последующие условия работы машины указывают, что резание должно быть остановлено или прекращено. Поэтому, если установлена останавливающая блокировка, система 250 управления может исполнить или выполнить автоматизированную операцию "остановка резания" (позиция 404), обеспечивающую надлежащую и безопасную остановку автоматизированной операции резания. Дополнительные детали, касающиеся автоматизированной операций остановки резания, приведены ниже и показаны на фиг.13.
Как показано на фиг.12b, в дополнение к проверке установлена ли останавливающая блокировка (позиция 402), система 250 управления также останавливает дисковые режущие узлы 66 (например, соответствующие двигатели врубовой головки) (позиция 406), останавливает гидромониторы 99 на каждом дисковом режущем узле 66 (позиция 408), и останавливает вакуумную систему 264 и другие компоненты системы 262 перемещения породы (позиция 410). Должно быть понятно, что в зависимости от состояния автоматизированной операции резания, когда она останавливается или прекращается, не все данные компоненты машины 10 могут работать. Поэтому на фиг.12b показаны компоненты, которые могут останавливаться при необходимости, когда останавливается автоматизированная операция резания.
В некоторых вариантах осуществления система 250 управления немедленно останавливает двигатели врубовой головки, гидромониторы 99 и насосный блок 257, когда останавливается автоматизированная операция резания. Вместе с тем, в некоторых вариантах осуществления система управления задерживает остановку работы вакуумной системы 264 и других компонентов системы 262 перемещения породы для обеспечения очистки от породы вакуумной и конвейерной линий. После остановки данных компонентов, связанных с машиной 10, и выполнения автоматизированной операции остановки резания (если необходимо), автоматизированная операция резания заканчивается.
Как также показано на фиг.12a, если блокировки в норме (позиция 401), система 250 управления запускает вакуумную систему 264 (позиция 412). В некоторых вариантах осуществления система 250 управления передает (например, по беспроводной связи) команду пуска в вакуумную систему 264 (например, с использованием приемопередатчика 260). Система 250 управления может также ожидать данных обратной связи от вакуумной системы 264, которые подтверждают, что вакуумная система 264 работает перед продолжением системой 250 управления автоматизированной операции резания. Если вакуумная система 264 не запускается, может устанавливаться блокировка, вызывающая остановку системой 250 управления автоматизированной операции резания. В дополнение, если система 250 управления теряет связь с вакуумной системой 264 во время автоматизированной операции резания, вакуумная система 264 остается работающей, но может останавливаться локально. Система 250 управления может также вести мониторинг давления вакуумной системы 264 во время автоматизированной операции резания. Если вакуумметрическое давление в системе превышает заданное минимальное значение или если вакуумная систем 264 останавливается локально, система 250 управления обеспечивает окончание текущей автоматизированной операции резания, но когда операция резания завершена, система 250 управления прекращает автоматизированную операцию резания и инициирует автоматизированную операцию остановки резания (см. фиг.13).
Если блокировки в норме (позиция 401, см. фиг.12a), система 250 управления также устанавливает машину 10 в заданное положение пуска резания (например, подвижную платформу 168 и рычаг 30). Поскольку возможно перемещение платформы 168 и рычага 30 в режиме ручного управления с использованием блока 261 дистанционного управления, перемещение подвижной платформы 168 и рычага 30 в заданное положение пуска перед пуском резания обеспечивает, что все резания начинаются из заданного положения. Поэтому, установка машины 10 в требуемое положение пуска резания при пуске каждой автоматизированной операции резания обеспечивает единообразное разрушение забоя. В некоторых вариантах осуществления положение пуска резания включает в себя положение выдвижения для резания, положение поворота для резания, и положение наклона для резания.
Для установки платформы 168 и рычага 30 в положение пуска резания система 250 управления (например, контроллер 2) выполняет выборку сохраненных координат разрабатываемого забоя и автоматически управляет исполнительными механизмами 171 и 172 выдвижения для выдвижения или втягивания подвижной платформы 168 в положение выдвижения для резания (позиция 414). В некоторых вариантах осуществления положение выдвижения для резания расположено приблизительно в 35 миллиметрах от разрабатываемого
забоя (т.е. положение выдвижения на забой, включенного в сохраненные координаты разрабатываемого забоя), что предотвращает трение дисковых режущих узлов 66 по разрабатываемому забою, когда рычаг 30 поворачивается, с удержанием машины 10 достаточно близко к разрабатываемому забою для предотвращения ненужного перемещения по выработке до и после резания. Поэтому, если подвижная платформа 168 устанавливается приблизительно от разрабатываемого забоя в 32 миллиметрах или ближе (т.е. от положения выдвижения на забой), система управления 270 втягивает подвижную платформу 168 для создания достаточного пространства между платформой 168 и разрабатываемым забоем, обеспечивающего поворот рычага 30. Альтернативно, если подвижная платформа расположена от разрабатываемого забоя приблизительно в 38 миллиметрах или дальше (т.е. от положение выдвижения на забой), система управления 270 поступательно перемещает подвижную платформу 168 для установки платформы 168 на надлежащем (например, минимальном) расстоянии от разрабатываемого забоя.
Когда подвижная платформа 168 устанавливается, обеспечивая зазор между рычагом 30 и разрабатываемым забоем (например, составляющий приблизительно от 33 миллиметров до 37 миллиметров) (позиция 416), система управления 20 определяет, находится ли угол поворота рычага 30 в пределах, приемлемых для положения поворота для резания (позиция 418). В частности, система 250 управления определяет имеет ли рычага 30 угол поворота, отличающийся больше чем на 2 градуса от угол поворота для резания. Положение поворота для резания может задаваться углом рычага 30, от которого начинается вруб, например, приблизительно 12 градусов. Как показано на фиг.12c, если величина имеющегося угла поворота выходит за приемлемый предел, система управления 20 определяет, остаются ли еще блокировки нормальными (позиция 420) и автоматически приводит в действие исполнительные механизмы 160 и 164 поворота, поворачивающие рычаг 30 (например, по часовой стрелке или против часовой стрелки) в положение поворота для резания (позиция 422). В некоторых вариантах осуществления при повороте рычага 30 к положению поворота для резания, система 250 управления также запускает двигатели, связанные с дисковыми режущими узлами 66. В других вариантах осуществления, как описано ниже, двигатели врубовой головки могут запускаться позже, во время автоматизированной операции резания.
Когда рычаг 30 установлен в положение поворота для резания (например, в пределах отклонения приблизительно на 1 градус от положения поворота для резания) (позиция 424), система 250 управления определяет, расположен ли рычаг 30 в положении наклона для резания (позиция 426, см. фиг.12g). В частности, система 250 управления определяет находится ли существующий угол наклона рычага 30 в пределах отклонения приблизительно на 2 градуса от положения наклона для резания. В некоторых вариантах осуществления положение наклона для резания устанавливается в положение наклона забоя. Поэтому, система 250 управления выполняет выборку сохраненных координат разрабатываемого забоя для определения нужного наклона рычага 30. Как показано на фиг.12g, если рычаг 30 не находится в положении наклона для резания (например, существующий угол наклона рычага 30 отличается более чем на 2 градуса от положения наклона для резания) и при этом блокировки остаются нормальными (позиция 430), система 250 управления автоматически управляет исполнительным механизмом 237 наклона для наклона врубовой головки 26 в положение наклона резания (позиция 432).
Когда подвижная платформа 168 устанавливается в выдвинутое положение для резания и рычаг 30 устанавливается в положение поворота для резания и положение наклона для резания (или в приемлемых пределах отклонения от каждого), рычаг 30 и подвижная платформа 168 установлены в положение для пуска резания и резание можно запускать. В частности, как показано на фиг.12d, после установки машины 10 в положение для пуска резания система 250 управления проверяет, что блокировки в норме (позиция 440) и запускает двигатели врубовой головки (позиция 442). В некоторых вариантах осуществления двигатели запускаются один за другим.
С работающими двигателями врубовой головки система 250 управления автоматически управляет исполнительными механизмами 171 и 172 выдвижения, выдвигающими платформу 168 к разрабатываемому забою до превышения сохраненного положения выдвижения забоя, включенного в координаты разрабатываемого забоя, на заданное значение глубины, называемой "глубина вруба" (т.е. максимальная глубина на которую в жилу требуется врезаться при повороте врубовой головки 26 по часовой стрелке) (позиция 446). В некоторых вариантах осуществления система 250 управления автоматически регулирует скорость и положение исполнительных механизмов 171 и 172 выдвижения для обеспечения согласования скорости и положения исполнительных механизмов 171 и 172 (например, с погрешностью приблизительно 0,1%) для предотвращения нештатного перекоса подвижной платформы 168 и, следовательно, рычага 30.
Когда подвижная платформа 168 достигает глубины вруба и с работающими двигателями врубовой головки, система управления 22 запускает гидромониторы 99 для очистки от разрушенной породы поверхностей дисковых режущих узлов 66 (позиция 448). В некоторых вариантах осуществления система 250 управления вначале дает на гидромониторы 99 давление приблизительно 100 бар (10 МПа). Как показано на фиг.12e, после запуска гидромониторов 99 система 250 управления проверяет блокировки (позиция 450), удостоверяется, что двигатели врубовой головки работают (позиция 452), и удостоверяется, что вакуумная система работает (позиция 454). В некоторых вариантах осуществления, когда гидромониторы 99 и вакуумная система выходят на заданные значения давления, система 250 управления увеличивает давление гидромониторов (позиция 456). Например, в некоторых вариантах осуществления система 250 управления увеличивает давление гидромониторов до давления резания (например, 250 бар (25 МПа).
Как показано на фиг.12e, когда подвижная платформа 168 достигает глубины вруба, система 250 управления также автоматически приводит в действие исполнительные механизмы 160 и 164 поворота, поворачивающие рычаг 30 (например, по часовой стрелке) (позиция 458), который врезается в жилу по дуге. Как описано выше, система 250 управления приводит в действие поворотные исполнительные механизмы возвратно-поступательно (т.е. один выдвигается, когда другой втягивается) для получения движения по кругу или дуге врубовой головки 26. Система 250 управления использует положение каждого поворотного исполнительного механизма 160 и 164 для вычисления угла дуги, которую врубовая головка 26 проходит. В некоторых вариантах осуществления система 250 управления вычисляют угол с использованием хода исполнительного механизма, с приложением к математическому алгоритму (например, полиномиальной кривой). Система 250 управления использует вычисленный угол для определения скорости поворота рычага 30. В частности, система 250 управления регулирует скорость поворота рычага 30 на основе математического алгоритма (например, полиномиальной кривой), который определяет пределы скорости для данного угла поворота. Например, система 250 управления может управлять скоростью поворота для поддержания постоянной скорости или алгоритма ограничения скорости или контролируя установленные пределы скорости для адаптивного поворота рычага 30 пропорционально нагрузке на двигатели врубового устройства. При этом система управления 20 управляет поворотом рычага 30 и связанной с ним врубовой головки 26, обеспечивая выполнение вруба требуемой глубины и ширины.
Система 250 управления поворачивает рычаг 30 до достижения врубовой головкой 26 заданного максимального угла поворота (позиция 460). Когда угол поворота рычага 30 достигает максимального значения (или положения с отклонением в пределах приблизительно 1 градуса от максимального угла поворота), система 250 управления уменьшает давление гидромониторов 99 (например, 100 бар (10 МПа) (позиция 470, см. фиг.12f). Система 250 управления также обновляет сохраненные координаты разрабатываемого забоя (например, сохраненные в одном из машиночитаемых носителей 272 контроллера 252) (позиция 472). В некоторых вариантах осуществления система 250 управления обновляет координаты добавляя глубину вруба к положению выдвижения на забой, включенному в сохраненные координаты разрабатываемого забоя. Также, если требуется управление горизонтированием, система 250 управления обновляет положение наклона на разрушаемом забое включенное в сохраненные координаты разрабатываемого забоя на основе заданного значения приращения для управление горизонтированием (например, прибавляя значение приращения для управления горизонтированием или вычитая его из сохраненного положения наклона на забое).
В дополнение, если исполнительный механизм 171 и 172 выдвижения не достиг максимального выдвижения (которое требует перемещения по выработке машины 10 для переустановки машины 10 в пределах разрабатываемого забоя) (позиция 474) и при этом блокировки остаются нормальными (позиция 476), система 250 управления управляет исполнительными механизмами 171 и 172 выдвижения для втягивания подвижной платформы 168 от разрабатываемого забоя с созданием заданного зазора (например, от приблизительно 25 до приблизительно 35 миллиметров) (позиция 480) для предотвращения трения дисковых режущих узлов 66 по разрабатываемому забою, когда рычаг 30 поворачивается в положению поворота для резания. Когда платформ 168 устанавливается с зазором (позиция 482) (например, платформа 168 устанавливается по меньшей мере приблизительно в 25 миллиметрах от обновленного разрабатываемого забоя), система 250 управления поворачивает рычаг 30 (например, против часовой стрелки) в положение поворота для резания (позиция 422, см. фиг.12c). В частности, система 250 управления поворачивает рычаг 30 в положение поворота для резания, как описано выше, и повторяет цикл резания показанный на фиг.12c-12g. В некоторых вариантах осуществления для выполнения последующего вруба после начального вруба, система 250 управления продвигает подвижную платформу 168 на расстояние равное глубине вруба плюс зазор.
Когда исполнительные механизмы 171 и 172 выдвижения достигают максимального выдвижения (позиция 474), машина 10 должна перемещаться по выработке для установки машины 10 в новое положение пуска резания, где рычаг 30 может вновь выдвигаться в разрабатываемый забой. В некоторых вариантах осуществления, когда исполнительные механизмы 171 и 172 достигают максимального выдвижения, система 250 управления активирует автоматизированную операцию подготовки к перемещению в выработке, описанную выше и показанную на фиг.10a-b (позиция 482), и автоматически перемещает по выработке машину 10 после автоматической подготовки машины к перемещению по выработке. После подготовки машины к перемещению по выработке и перемещения по выработке машина 10 может управляться (например, автоматически) для выполнения дополнительных врубов до достижения суммарного заданного расстояния выдвижения машины, которое приблизительно равно длине кабеля электропитания, соединенного с машиной 10. Когда данное расстояние достигается, машина должна перемещается по выработке (например, назад) и переустанавливаться для последующих врубов.
Остановка резания
Как указано выше, во время автоматизированной операции резания оператор может прерывать текущий цикл резания, нажимая кнопку на блоке 261 дистанционного управления или перемещая джойстик на блоке 261 дистанционного управления, и блок 261 дистанционного управления может передать команду «инициирование» в систему 250 управления. Система 250 управления может также автоматически прерывать текущий автоматизированный цикл резания, если конкретные параметры работы превышают заданные пороговые значения во время автоматизированного цикла резания (например, если одна или несколько блокировок машины устанавливаются или срабатывают). В некоторых вариантах осуществления, когда резание останавливается (либо в режиме ручного управления или автоматически), система 250 управления останавливает двигатели врубовой головки и прекращает автоматизированную операцию резания. Система 250 управления может также выполнять автоматизированную операцию остановки резания. В частности, как указано выше и показано на фиг.9a-c, контроллеры 252 включают в себя программное обеспечение, хранящееся в машиночитаемых носителях 272 и исполняемое процессором 270 для выполнения различных автоматизированных операций горной машины 10. В некоторых вариантах осуществления программное обеспечение включает в себя инструкции для выполнения автоматизированной операции остановки резания. На фиг.13 показана автоматизированная операция остановки резания, выполняемая с помощью системы 250 управления согласно одному варианту осуществления изобретения.
В некоторых вариантах осуществления, если оператор в режиме ручного управления останавливает текущий цикл резания, инициируется автоматизированная операция остановки резания. В дополнение, если конкретные параметры работы превышаются во время автоматизированной операции остановки резания, система 250 управления автоматически прекращает автоматизированную операцию резания и инициирует автоматизированную операцию остановки резания. Например, в некоторых вариантах осуществления система 250 управления автоматически останавливает автоматизированную операцию резания, когда подвижная платформа 168 достигает максимального выдвижения во время автоматизированной операции резания, так что машина может переустанавливаться для дополнительных последовательностей резания. Система 250 управления может также автоматически инициировать автоматизированную операцию остановки резания, когда конкретные неаварийные отказы происходят во время автоматизированной операции резания. Например, система 250 управления может инициировать автоматизированную операцию остановки резания, когда (I) токи в двигателях врубовой головки или температуры обмоток превышают заданные значения, (II) релейная связь защиты двигателя врубовой головки отказывает, (III) не исполняется какая-либо часть автоматизированной операции резания, (IV) масло загрязнено водой до конкретной величины, (V) подача масла или воды в гидростатический подшипник врубовой головки отказывает, или давление падает или становится чрезмерным, или (VI) температура масла гидростатического подшипника врубовой головки превышает заданные значения. В некоторых вариантах осуществления система 250 управления использует информацию с датчиков 267 для определения, возникает ли одно или несколько из данных условий для запуска автоматизированной операции остановки резания.
Автоматизация цикла остановки резания обеспечивает эффективную и безопасную остановку резания и обеспечивает безопасный выход машины 10 из конкретных системных отказов, которые происходят во время автоматизированной операции резания (например, отказов, не требующих аварийной или не аварийной остановки работы). В дополнение, в некоторых вариантах осуществления в автоматизированной операции остановки резания также переустанавливаются рычаг 30 и подвижная платформа 168 в положение, которое обеспечивает эксплуатационному и другому персоналу простой доступ к машине 10 и компонентам, связанным с рычагом 30 (например, дисковым режущим узлам 66) для выполнения любого требуемого техобслуживания. Кроме того, выполнение автоматизированной операции остановки резания также обеспечивает быстрый переход от одной группы врубов к следующей. В частности, автоматизированная операция остановки резания автоматически устанавливает машину 10 в положении для перемещения по выработке, в котором машина 10 готовится к последующему резанию.
Когда инициируется автоматизированная операция остановки резания (позиция 500), система 250 управления выполняет автоматизированную операцию остановки резания, не требуя взаимодействия с ручным управлением. В частности, как показано на фиг.13a, система 250 управления определяет в норме ли блокировки машины (позиция 501). Система 250 управления также автоматически управляет исполнительными механизмами 171 и 172 выдвижения, отводящими подвижную платформу 168 от разрабатываемого забоя на расстояние техобслуживания (позиция 502). В частности, система 250 управления убирает подвижную платформу 168 от разрабатываемого забоя приблизительно на 50 миллиметров от положения выдвижения на забой, включенного в сохраненные координаты разрабатываемого забоя. Уборка платформы 168 от разрабатываемого забоя на расстояние техобслуживания, обеспечивает дисковым режущими узлами 66 освобождение от разрабатываемого забоя, когда рычаг 30 поворачивается.
Когда подвижная платформа 168 достигает расстояния техобслуживания (например, устанавливается в пределах отклонения приблизительно на 3 миллиметра от расстояния техобслуживания) (позиция 506) и при этом блокировки остаются нормальными (позиция 508), система 250 управления автоматически приводит в действие исполнительные механизмы 160 и 164 поворота, поворачивающие рычаг 30 в положение для перемещения по выработке (позиция 510). Когда рычаг 30 расположен в положении для перемещения по выработке (например, с отклонением приблизительно в пределах 1 градуса от положения для перемещения по выработке) (позиция 512), автоматизированная операция остановки резания заканчивается.
Остановка работы
Остановка работы машины 10 может также выполняться, как автоматизированная операция. В частности, как указано выше и показано на фиг.9a-c, контроллеры 252 включают в себя программное обеспечение, хранящееся в машиночитаемых носителях 272 и исполняемое процессором 270 для выполнения различных автоматизированных операций горной машины 10. В некоторых вариантах осуществления программное обеспечение включает в себя инструкции для выполнения автоматизированной операции остановки работы. Использование автоматизированной операции остановки работы обеспечивает машине прохождение через управляемую остановку работы (например, в ответ на команду из блока 261 дистанционного управления), в которой машина 10 готовится к последующему пуску. Управляемая остановка работы также содействует подготовке машины после пересменки, что уменьшает простой машины.
В некоторых вариантах осуществления для инициирования автоматизированной операции остановки работы оператор нажимает и удерживает кнопку остановки работы на блоке 261 дистанционного управления (например, по меньшей мере две секунды), когда насосный блок 257 работает. Система 250 управления может также автоматически инициировать автоматизированную операцию остановки работы (например, по причине отказа машины, происходящего во время автоматизированной операции резания). После инициирования автоматизированной операции остановки работы (позиция 600), система 250 управления выполняет автоматизированную операцию остановки работы, не требуя взаимодействия с ручным управлением. В частности, как показано на фиг.14a, система 250 управления определяет в норме ли блокировки машины (позиция 601) и автоматически управляет исполнительными механизмами 171 и 172 выдвижения для выдвижения или втягивания подвижной платформы 168 в положение выдвижения для резания (например, приблизительно 1100 миллиметров) (позиция 602).
Когда платформа 168 достигает положение выдвижения для резания (например, с отклонением приблизительно в 2 миллиметра от положение выдвижения для резания) (позиция 604), система 250 управления определяет, установлен ли рычаг 30 в положении поворота для резания (позиция 606). Если рычаг 30 установлен в положение поворота для резания (например, имеется угол поворота рычага 30 с отклонением в пределах приблизительно в 2 градуса от положения поворота для резания), автоматизированная операция остановки работы заканчивается. Если рычаг 30 не установлен в положение поворота для резания (например, имеется угол поворота рычага 30 с отклонением, превышающим приблизительно 2 градуса от положения поворота для резания) и при этом блокировки остаются нормальными (позиция 607, см. фиг.14b), система 250 управления автоматически приводит в действие исполнительные механизмы 160 и 164 поворота, поворачивающие рычаг 30 в положение поворота для резания (позиция 608). В некоторых вариантах осуществления система 250 управления поворачивает рычаг 30 по часовой стрелке или против часовой стрелки в зависимости от положения рычага 30 относительно положения поворота для резания. Когда рычаг 30 достигает положения поворота для резания (например, положения с отклонением в пределах приблизительно 1 градуса от положения поворота для резания) (позиция 610), система 250 управления автоматически останавливает насосный блок 257 (позиция 612) и вакуумную систему (позиция 614) и автоматизированная операция остановки резания заканчивается.
После остановки работы машины 10 оператор может отключить электропитание машины 10. Когда машина 10 изолирована, электропитание должно быть отключено на всех приводах управления, но контроллеры 252 могут питаться электроэнергией до разрядки аккумуляторов в составе машины до заданного минимального напряжения. В дополнение, когда машина 10 изолирована, контроллеры 252 могут оставаться запитанными электроэнергией, но выход контроллеров 252 может отключаться для предотвращения выполнения контроллерами 252 любых функций управления. Кроме того, если машина 10 находится на холостом ходу в течение заданного времени холостого хода, система 250 управления может автоматически остановить работу двигателя насосного блока 257 в качестве меры безопасности и для экономии электроэнергии.
В некоторых вариантах осуществления может также выполняться аварийная остановка. Для инициирования аварийной остановки оператор может нажать кнопку аварийной остановки, установленную на машине 10 или блоке 261 дистанционного управления или другой выносной системе или устройстве (например, диспетчерского управления и сбора данных). Нажатие кнопки аварийной остановки представляет собой неуправляемую остановку работы, и система 250 управления немедленно останавливает насосный блок 257.
Должно быть понятно, что в некоторых вариантах осуществления во время любой из автоматизированных операций, описанных выше, оператор может отменить автоматизированную операцию, нажав конкретную или любую кнопку или устройство (например, джойстик) на блоке 261 дистанционного управления или на другой выносной системе или устройстве (например, диспетчерского управления и сбора данных). В дополнение параметры, используемые во время автоматизированных операций, описанных выше, могут варьироваться на основе среды горной разработки, породы и других параметров горной машины 10 и/или другого оборудования, используемого с машиной 10. В некоторых вариантах осуществления параметры могут устанавливаться в режиме ручного управления оператором через систему диспетчерского управления и сбора данных или другую систему или интерфейс для получения параметров машины и передачи параметров в систему 250 управления.
Поэтому, как описано выше, операции горной машины могут выполняться автоматически. При автоматической работе блок 261 дистанционного управления может использоваться для инициирования автоматизированной операции. Различные проверки и тесты могут выполняться до, во время и после автоматизированной операции для обеспечения правильного и безопасного выполнения операции. С помощью автоматизации операций горная машина может использоваться более эффективно и в более безопасных условиях работы.
Различные признаки изобретения изложены ниже в формуле изобретения.
Реферат
Варианты осуществления настоящего изобретения относятся к автоматизированным операциям горных машин, таких как горные машины разработки твердых горных пород непрерывного действия. Способы и система автоматического управления горной проходческой машиной непрерывного действия. Один способ включает в себя автоматическое управление по меньшей мере одним исполнительным механизмом для установки платформы, несущей врубовую головку, в заданное положение для пуска, автоматическое управление по меньшей мере одним исполнительным механизмом для выдвижения платформы к разрабатываемому забою до входа врубовой головки в контакт с разрабатываемым забоем и превышения по меньшей мере одним индикатором физической силы, действующей между врубовой головкой и разрабатываемым забоем, заданного значения, и автоматическое сохранение по меньшей мере одной координаты разрабатываемого забоя на машиночитаемом носителе, причем по меньшей мере одна координата основана на параметре по меньшей мере одного исполнительного механизма, когда индикатор превышает заданное значение. Технический результат заключается в повышении безопасности и производительности работ. 12 н. и 110 з.п. ф-лы, 26 ил.
Комментарии