Способы и системы управления направлением проходки горной машины - RU2756634C2
Код документа: RU2756634C2
Чертежи











Описание
Перекрестная ссылка на родственные заявки
[01] По настоящей заявке испрашивается приоритет по предварительным патентным заявкам США 62/679,424, подана 1 июня 2018 г., и 62/681,345, подана 6 июня 2018 г., полное содержание которых включено в данный документ посредством ссылки.
Область техники, к которой относится изобретение
[02] Варианты осуществления изобретения относятся к способам и системам для управления направлением проходки горной машины, когда горная машина выполняет операцию врубки.
Уровень техники
[03] Для управления направлением проходки горного оборудования применяют различные методики. Управление направлением проходки на поверхности земли опирается в основном на спутниковые системы глобального позиционирования (GPS), позиционирование дополняют инерциальные датчики, такие как гироскопы. Под землей применяют лидарные датчики для управления подвижным оборудованием, перемещающимся через существующие рудники в ограниченных сценариях, но не для управления направлением проходки во время врубки. Вместо этого управление направлением проходки во время врубки выполняет оператор, управляющий горной машиной, применяя визуальный контроль машины и стенок горной выработки (например, стенок), в некоторых случаях с помощью одноточечного излучателя или лазерного нивелира, установленного вне машины и применяемого для визуальной привязки.
Раскрытие изобретения
[04] Управление направлением проходки выемочного комбайна непрерывного действия во время врубки в минеральном пропластке представляет сложную проблему, поскольку ни датчики, ни опорные точки нельзя разместить впереди машины, где порода еще не удалена. Кроме того, подземное оборудование не позволяет применять GPS, и гироскопы являются неэффективными, вследствие комбинации медленного перемещение машин и высокой вибрации.
[05] Управление направлением проходки является элементом, требуемым в горной промышленности для согласованной врубки и следования плану рудника. Как отмечено, управление направлением проходки во время врубки в настоящее время операторы выполняют вручную на основе своего визуального наблюдения. Недостаток точности и сложность наблюдения отклонения часто приводит к значительным корректировкам и либо заметным уступам в стенке выработки или корректирующим врубам для удаления уступов, что приводит к потере продуктивности.
[06] Соответственно, варианты осуществления, описанные в данном документе, обеспечивают способы и системы для управления направлением проходки горной машины. Целью некоторых способов и систем, описанных в данном документе, является измерение и управление относительного направления проходки машины, когда машина врезается в новую породу, посредством применения установленных на машине лидарных датчиков для измерения ранее вырезанных элементов рудника сзади и сбоку машины, что не требует применения датчиков или источников излучения, установленных вне машины. Информация, собранная одним или более лидарными датчиками, применяетcя для управления направлением проходки, когда врубовая машина выполняет врубку в направлении вперед. В некоторых вариантах осуществления данные, собранные лидарным датчиком (датчиками) можно интегрировать с данными с других установленных на машине датчиков, таких как видеокамеры или сверхширокополосные измерительные приборы. Альтернативно или в дополнение, в некоторых вариантах осуществления, поскольку ранее вырезанные элементы должны быть измерены и применены, как основа для управления направлением проходки будущего врубки, вначале производят изыскания на ранее вырезанных элементах рудника до измерения с помощью горной машины и применения для управления будущей врубкой, для подтверждения что ранее вырезанные элементы соответствуют плану рудника.
[07] Соответственно, варианты осуществления обеспечивают способы и системы для управления направлением проходки горной машины, когда горная машина выполняет операцию врубки. Например, один вариант осуществления обеспечивает систему для управления направлением проходки горной машины, когда горная машина выполняет операцию врубки. Система содержит врубовую систему горной машины и гусеничную ходовую часть горной машины, содержащую левую гусеницу и правую гусеницу. Система также содержит лидарный датчик, установленный на горной машине, причем лидарный датчик выполнен с возможностью испускания светового импульса к поверхности ранее вырезанной горной выработки и принимают световой импульс, отраженный обратно от поверхности ранее вырезанной горной выработки. Система также содержит электронный процессор. Электронный процессор выполнен с возможностью приема данных с лидарного датчика на основе светового импульса, принятого лидарным датчиком. Электронный процессор также выполнен с возможностью определения текущего направления проходки горной машины на основе данных, принятых с лидарного датчика, и сравнения текущего направления проходки с направлением на цель проходки горной машины. Электронный процессор выполнен с возможностью в ответ на текущее направление проходки, отличающееся от направления на цель проходки горной машины не на заданную величину, управления горной машиной для корректировки текущего направления проходки горной машины.
[08] В некоторых вариантах осуществления лидарный датчик установлен на задней части горной машины. В других вариантах осуществления первый лидарный датчик установлен на первой боковой стороне горной машины и второй лидарный датчик установлен на второй боковой стороне горной машины.
[09] Другой вариант осуществления содержит способ управление направлением проходки горной машины, когда горная машина выполняет операцию врубки. Способ содержит прием электронным процессором данных с лидарного датчика, установленного на горной машине. Способ также содержит определение электронным процессором, текущего направления проходки горной машины на основе данных, принятых с лидарного датчика, причем данные генерируются лидарным датчиком на основе светового импульса, принятого лидарным датчиком. Способ также содержит сравнение электронным процессором текущего направления проходки с направлением на цель проходки горной машины. Способ также содержит, в ответ на текущее направление проходки, отличающееся от направления на цель проходки горной машины не на заданную величину, управление с помощью электронного процессора горной машиной для корректировки текущего направления проходки горной машины.
[10] Другие аспекты изобретения станут понятными из подробного описания и прилагаемых чертежей.
Краткое описание чертежей
[11] На фиг. 1A-1C показана горная машина.
[12] На фиг. 2 показана система управления направлением проходки горной машины некоторых вариантов осуществления.
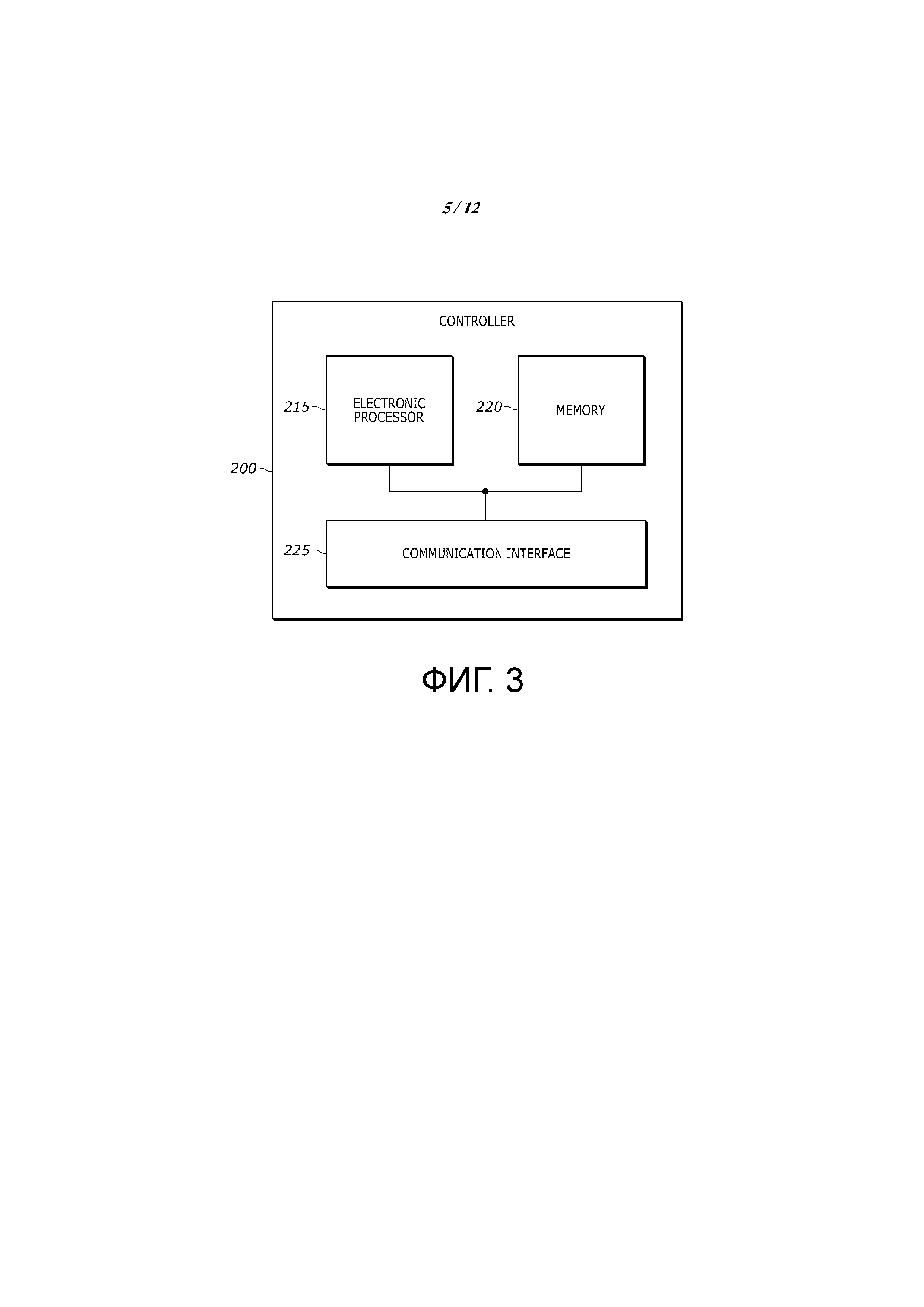
[13] На фиг. 3 показан контроллер системы фиг. 2 некоторых вариантов осуществления.
[14] На фиг. 4 показано множество лидарных датчиков, установленных на горной машине некоторых вариантов осуществления.
[15] На фиг. 5A показан вид сбоку горной машины с лидарным датчиком, установленным на задней части горной машины некоторых вариантов осуществления.
[16] На фиг. 5B показан вид сверху горной машины с двумя лидарными датчиками, установленными на задней части горной машины, некоторых вариантов осуществления.
[17] На фиг. 6A показан вид сбоку горной машины с лидарным датчиком, установленным на боковой стороне горной машины некоторых вариантов осуществления.
[18] На фиг. 6B показан вид сверху горной машины с двумя лидарными датчиками, установленный на двух боковых сторонах горной машины некоторых вариантов осуществления.
[19] На фиг. 7 показана блок-схема последовательности операций способа управления направлением проходки горной машины с применением системы фиг. 2 некоторых вариантов осуществления.
[20] На фиг. 8 показана двумерная карта рудника, построенная с применением данных, обнаруженных одним или более лидарными датчиками некоторых вариантов осуществления.
Описание предпочтительных вариантов осуществления изобретения
[21] Перед подробным описанием любых вариантов осуществления изобретения следует пояснить, что изобретение не ограничено в заявке деталями конструкции и устройством компонентов, изложенными в следующем описании или проиллюстрированными на прилагаемых чертежах. Изобретение предполагает возможность других вариантов осуществления, а также реализацию их на практике различными путями.
[22] Также следует понимать, что фразеология и терминология, применяемая в данном документе, служит для описания и не должна считаться ограничивающей. Применение терминов ʺвключающий в себяʺ, ʺсодержащийʺ и ʺимеющийʺ, а также их вариаций в данном документе охватывает позиции, перечисленные ниже в данном документе и их эквиваленты, а также дополнительные позиции. Термины ʺустановленныйʺ, ʺсоединенныйʺ и ʺсцепленныйʺ, применены в широком смысле и охватывают как варианты прямого, так и непрямого монтажа, соединения и сцепления. Кроме того, ʺсоединенныйʺ, ʺсцепленныйʺ не ограничены физическими или механическими соединениями или сцеплениями и могут включать в себя электрические или соединения или сцепления, как прямые, так и не прямые. Также, электронные коммуникации и сообщения могут быть выполнены с применением любых известных средств, в том числе прямых соединений, беспроводных соединений и т.д.
[23] Следует также отметить что множество устройств на основе агрегатного обеспечения и программного обеспечения, а также множество отличающихся конструктивных компонентов может быть использовано для реализации изобретения. Кроме того, следует понимать, что варианты осуществления заявки могут содержать агрегатное обеспечение, программное обеспечение и электронные компоненты или модули, которые для рассмотрения могут быть проиллюстрированы и описаны, как если большинство компонентов реализовано только в агрегатном обеспечении. Вместе с тем, специалисту в данной области техники на основе прочтения данного описания должно быть ясно, что по меньшей мере в одном варианте осуществления основанные на электронике аспекты заявки можно реализовать в программном обеспечении (например, сохраняемыми на нетранзиторном машиночитаемом средстве), исполняемым одним или более электронными процессорами. Поэтому следует отметить, что множество устройств на базе агрегатного обеспечения и программного обеспечения, а также множество отличающихся конструктивных компонентов можно использовать для реализации изобретения. Например, ʺблоки управленияʺ и ʺконтроллерыʺ, описанные в спецификации, могут содержать один или более электронных процессоров, один или более модулей запоминающих устройств, в том числе нетранзиторные машиночитаемые средства, один или более вводных /выводных интерфейсов и различные соединения (например, системную шину), соединяющих компоненты.
[24] Как отмечено выше, управление направлением проходки выемочного комбайна непрерывного действия во время врубки в минеральном пропластке представляет трудную проблему, поскольку ни датчики ни опорные точки не могут быть расположены впереди машины, по меньшей мере на одном с ней уровне, поскольку порода еще не удалена. Альтернативно или в дополнение, датчики некоторых типов, такие как блок инерциального измерения, не способны обеспечить курсовые измерения с достаточной точностью для вариантов применения в горных разработках. Варианты осуществления, описанные в данном документе, решают проблемы и обеспечивают способы и системы для управления направлением проходки горной машины при выполнении горной машиной процесса врубки.
[25] На фиг. 1A-1C показан выемочный комбайн 150 непрерывного действия (например, горная машина). Выемочный комбайн 150 непрерывного действия содержит врубовую систему 155, которая содержит вращающиеся резцы 160 с зубками 165, которые, по существу, стесывают руду (например, уголь) со стенки или потолка в шахте горной выработки. Врубовую систему 155 приводит во вращение пара двигателей через коробку передач. То есть, коробка передач принимает вращение на выходе пары двигателей и, в свою очередь, приводит во вращение резцы 160. Падающая руда собирается в сборный лоток 170 и направляется загребающими головками 175 к конвейеру 180. Каждую загребающую головку 175 вращает отдельный двигатель, и лапы 185 выталкивают руду в сборном лотке 170 на конвейер 180. Выемочный комбайн 150 непрерывного действия дополнительно содержит левую гусеницу 190a и правую гусеницу 190b для обеспечения перемещения машины в целом. Каждая гусеница 190a-b приводится в действие отдельным двигателем. Как показано на фиг. 1B, врубовая система 155 и конвейер 180 могут подниматься и опускаться и, как показано на фиг. 1C, конвейер 180 может поворачиваться в шарнире 193.
[26] На фиг. 2 показана система 195 управления направлением проходки горной машины 150, когда горная машина 150 выполняет операцию врубки некоторых вариантов осуществления. Как показано на фиг. 2, система 195 содержит контроллер 200, множество лидарных датчиков 205 и другие датчики 210, связанные с горной машиной 150. В некоторых вариантах осуществления система 195 содержит меньше, дополнительные или отличающиеся от показанных на фиг. 2 компонентов в различных конфигурациях и может выполнять функции, дополняющие описанные в данном документе. Например, в некоторых вариантах осуществления система 195 содержит один лидарный датчик 205 или больше двух лидарных датчиков 205. Система 195 дополнительно содержит двигатели 211 врубовой системы, двигатель 212 левой гусеницы и двигатель 213 правой гусеницы. В других вариантах осуществления система 195 содержит другие компоненты, связанные с горной машиной 150, такие как один или более исполнительных механизмов, двигатели, насосы и т.п.
[27] В примере, показанном на фиг. 3, контроллер 200 содержит электронный процессор 215 (например, микропроцессор, специализированную интегральную микросхему, или другой подходящий электронный прибор), запоминающее устройство 220 (например, одно или более нетранзиторных машиночитаемых запоминающих устройств), и интерфейс 225 ввода-вывода. Электронный процессор 215, запоминающее устройство 220 и интерфейс 225 ввода-вывода поддерживают связь с одним или более соединениями передачи данных или шинами, или их комбинациями. Контроллер 200, показанный на фиг. 3, представляет один пример, и в некоторых вариантах осуществления контроллер 200 содержит меньше, дополнительные или отличающиеся компоненты в конфигурациях, отличающихся от показанной на фиг. 3. Также, в некоторых вариантах осуществления контроллер 200 выполняет функции дополняющие функциональность, описанную в данном документе.
[28] Электронный процессор 215 выполнен с возможностью считывания инструкций из запоминающего устройства 220 и исполнения инструкций для выполнения набора функций, в том числе, способов, описанных в данном документе. Например, в некоторых вариантах осуществления, электронный процессор 215 исполняет инструкции для управления направлением проходки горной машины 150, когда горная машина 150 выполняет операцию врубки. Запоминающее устройство 220 может содержать комбинации запоминающих устройств отличающихся типов, таких как постоянное запоминающее устройство (ʺROMʺ), оперативное запоминающее устройство (ʺRAMʺ) или другой нетранзиторный машиночитаемый носитель. Как отмечено выше, запоминающее устройство 220 сохраняет инструкции, исполняемые электронным процессором 215. Запоминающее устройство 220 может также сохранять данные, такие как данные, собранные лидарными датчиками 205, другими датчиками 210, или их комбинацией. Запоминающее устройство 220 может также сохранять встроенное программное обеспечение, одно или более приложений, программные данные, фильтры, правила, один или более программных модулей и другие исполняемые инструкции или данные.
[29] Интерфейс 225 ввода-вывода обеспечивает контроллеру 200 связь с приборами внешними относительно контроллера 200 (например, принимает ввод и обеспечивает вывод данных для приборов внешних относительно контроллера 200 напрямую или не напрямую). В одном примере контроллер 200 поддерживает связь с одним или более лидарными датчиками 205, другими датчиками 210, двигателями 211 врубовой системы, двигателем 212 левой гусеницы и двигателем 213 правой гусеницы, или их комбинацией через интерфейс 225 ввода-вывода. В некоторых вариантах осуществления интерфейс 225 ввода-вывода содержит порт для приема проводного соединения с лидарными датчиками 205, другими датчиками 210 или их комбинацией. Альтернативно или в дополнение, интерфейс 225 ввода-вывода содержит приемопередатчик для установления беспроводного соединения с лидарными датчиками 205, другими датчиками 210 или их комбинацией. Альтернативно или в дополнение, интерфейс 225 ввода-вывода поддерживает связь с коммуникационной шиной (например, сетью контроллеров (ʺCANʺ) для поддержания не напрямую связи, например, с лидарными датчиками 205, другими датчиками 210, или их комбинацией.
[30] Возвращаясь к рассмотрению фиг. 2, система 195 также содержит двигатели 211 врубовой системы, двигатель 212 левой гусеницы и двигатель 213 правой гусеницы. Двигатели 211 врубовой системы включают в себя двигатели, которые приводят в действие резцы 160, сборные головки 175 и конвейер 180. Двигатель 212 левой гусеницы приводит в действие левую гусеницу 190a, и двигатель 213 правой гусеницы приводит в действие правую гусеницу 190b. Контроллер 200 выполнен с возможностью управления каждым из данных двигателей.
[31] Система 195 дополнительно содержит один или более лидарных датчиков 205. Лидарные датчики 205 эмитируют световые импульсы к поверхности и принимают световые импульсы, отраженные обратно от поверхности. На основе испускаемых и принятых световых импульсов, лидарный датчик (датчики) 205 может определять расстояние между лидарным датчиком 205 и поверхностью. Например, лидарный датчик (датчики) 205 может содержать схему синхронизации для вычисления времени прохождения светового импульса (от эмиссии до приема), и затем делить время прохождения на скорость света для определения расстояния от поверхности. В других вариантах осуществления сравнивают длины волн принятого светового импульса и опорного светового импульса для определения расстояния между лидарным датчиком 205 и поверхностью. В некоторых вариантах осуществления лидарный датчик 205 снимает и обеспечивает электронному процессору 215 ряд измерений расстояния до отличающихся точек цели (например, сканируя площадь), при этом электронный процессор 215 выполнен с возможностью генерирования цифрового двумерного или трехмерного представления цели (например, поверхности).
[32] Другими словами, лидарные датчики 205 выполнены с возможностью обнаружения данных (информации), связанных с окружением горной машины 150. В частности, лидарные датчики (например, лидарные датчики 205) выполнены с возможностью измерения ранее вырезанных элементов горной выработки за горной машиной 150, с одной или более боковых сторон горной машины 150 или их комбинации (ранее вырезанных элементов). В некоторых вариантах осуществления лидарные датчики 205 выполнены с возможностью измерения элементов горной выработки которые были ранее вырезаны перед фронтом горной машины 150 на другом уровне. Например, в варианте многоуровневых планов горных работ, где пропласток удаляют, применяя многочисленные заходки на все более глубоких уровнях, лидарные датчики 205 выполнены с возможностью измерения элементов горной выработки, ранее вырезанных впереди текущего положения горной машины 150, но на более высоком уровне, чем текущее положение. Другими словами, лидарные датчики 205 выполнены с возможностью обнаружения или сбора данных, относящихся к одной или более ранее вырезанным поверхностям горной выработки. Лидарные датчики 205 обеспечивают обнаруженными данными электронный процессор 215. Соответственно, применяющий лидарный датчики 205, электронный процессор 215 выполнен с возможностью определения и измерения элементов горной выработки, относящихся к ранее вырезанным поверхностям горной выработки.
[33] Как проиллюстрировано на фиг. 4, один или более лидарных датчиков 205 установлены на горной машине 150. В примере, показанном на фиг. 4, четыре лидарных датчика 205 (показаны позиции 205a, 205b, 205c, и 205d) установлены на горной машине 150. Горная машина 150 установлена шахте 250 рудника между одной стенкой 255a и второй стенкой 255b.
[34] Как показано на фиг. 4, первый лидарный датчик 205a и второй лидарный датчик 205b установлены на задней части горной машины 150. Первый лидарный датчик 205a и второй лидарный датчик 205b обнаруживают данные, связанные с задним окружением горной машины 150 (ранее вырезанные элементы сзади горной машины 150). Например, на фиг. 5A-5B показан первый лидарный датчик 205a и второй лидарный датчик 205b обнаруживающие данные, связанные с окружение задней части горной машины 150. На фиг. 5A показан вид сбоку горной машины 150, и на фиг. 5B показан вид сверху горной машины 150. Как показано на фиг. 5A-5B, первый лидарный датчик 205a имеет первую дальность 206a обнаружения, и второй лидарный датчик 205b имеет вторую дальность 206b обнаружения. Соответственно, первый лидарный датчик 205a обнаруживает данные, связанные с ранее вырезанными элементами на первой дальности 206a обнаружения, и второй лидарный датчик 205b обнаруживает данные, связанные с ранее вырезанными элементами на второй дальности 206b обнаружения. В некоторых вариантах осуществления как проиллюстрировано на фиг. 5B, первый лидарный датчик 205a и второй лидарный датчик 205b нацелены на отличающиеся области и, соответственно, первая дальность 206a обнаружения и вторая дальность 206b обнаружения отличаются. В некоторых вариантах осуществления первая дальность 206a обнаружения и вторая дальность обнаружения 205b, являясь отличающимися, включают в себя перекрываемый участок, такой как проиллюстрирован на фиг. 5B. В некоторых вариантах осуществления участок сзади горной машины 150 содержит участок горной машины 150 сзади от средней точки горной машины 150 (т.е., заднюю половину горной машины 150 по продольной оси горной машины 150). В некоторых вариантах осуществления участок сзади горной машины 150 содержит участок задней трети, участок задней четверти или участок задней одной пятой горной машины 150. В некоторых вариантах осуществления один или более из первого и второго лидарных датчиков 205a, 205b установлены на обращенной назад поверхности задней части горной машины 150.
[35] Дополнительно, как показано на фиг. 4, третий лидарный датчик 205c установлен на первой боковой стороне горной машины 150, и четвертый лидарный датчик 205d установлен на второй боковой стороне горной машины 150. Третий лидарный датчик 205c обнаруживает данные, связанные с окружением первой боковой стороны горной машины 150, и четвертый лидарный датчик 205d обнаруживает данные, связанные с окружением второй боковой стороны горной машины 150. Например, на фиг. 6A-6B показан третий лидарный датчик 205c и четвертый лидарный датчик 205d, обнаруживающие данные, связанные с окружением первой боковой стороны и окружением второй боковой стороны, соответственно, горной машины 150. На фиг. 6A показан вид сбоку горной машины 150, и на фиг. 6B показан вид сверху горной машины 150. Как показано на на фиг. 6A-6B, третий лидарный датчик 205c имеет третью дальность 206c обнаружения, и четвертый лидарный датчик 205d имеет четвертую дальность 206d обнаружения. Соответственно, третий лидарный датчик 205c обнаруживает данные, связанные с ранее вырезанными элементами на третьей дальности 206c обнаружения и четвертый лидарный датчик 205d обнаруживает данные, связан с ранее вырезанными элементами на четвертой дальности 206d обнаружения. Например, третий лидарный датчик 205c выполнен с возможностью обеспечивать электронному процессору 215 измерения расстояний между третьим лидарным датчиком 205c и различными точками первой стенки 255а выработки, и четвертый лидарный датчик 205d выполнен с возможностью обеспечивать электронный процессор 215 измерениями расстояний между четвертым лидарным датчиком 205d и различными точками второй стенки 255b выработки. В некоторых вариантах осуществления, как проиллюстрировано на фиг. 6B, третий лидарный датчик 205c и четвертый лидарный датчик 205d нацелены на отличающиеся области и, соответственно, третья дальность 206c обнаружения и четвертая дальность 206d обнаружения отличаются. В некоторых вариантах осуществления третья дальность 206c обнаружения и четвертая дальность обнаружения 205d, являются не перекрывающимися дальностями, как проиллюстрировано на фиг. 6B. В некоторых вариантах осуществления каждая боковая сторона горной машины 150 (например, левая боковая сторона) содержит участок горной машины 150 до соответствующей стороны средней точки горной машины 150 (например, левая половина горной машины 150). В некоторых вариантах осуществления боковая сторона горной машины 150 содержит одну треть боковой стороны, одну четвертую боковой стороны или одну пятую боковой стороны горной машины 150. В некоторых вариантах осуществления один или более лидарных датчиков 205 установлены на обращенной вбок поверхности боковой стороны горной машины 150.
[36] Альтернативно или в дополнение, в некоторых вариантах осуществления дополнительный или меньше лидарных датчиков 205 установлены на горной машине, чем показано на фиг. 4, 5A-5B и 6A-6B. Например, в некоторых вариантах осуществления только один или более лидарных датчиков 205 установлены на задней части горной машины 150. Вместе с тем, в других вариантах осуществления только один или более лидарных датчиков 205 установленный на одной или более боковых сторонах горной машины 150. Альтернативно или в дополнение, в некоторых вариантах осуществления один или более лидарных датчиков 205 могут быть установлены на передней части горной машины 150. Один или более лидарных датчиков 205, установленных на передней части горной машины 150, могут быть выполнены с возможностью измерения элементов горной выработки, которые были ранее вырезаны впереди текущего положения горной машины 150 но на более высоком уровне чем текущие положения (например, в варианте многоуровневого плана горных работ). В некоторых вариантах осуществления передняя часть горной машины 150 содержит часть горной машины 150, расположенную впереди средней точки горной машины 150 (т.е., переднюю половину горной машины 150 вдоль продольной оси горной машины 150). В некоторых вариантах осуществления передняя часть горной машины 150 содержит переднюю треть, четверть или пятую часть горной машины 150. В некоторых вариантах осуществления один или более лидарных датчиков 205 установлены на обращенной вперед поверхности передней части горной машины 150.
[37] Как отмечено выше, электронный процессор 215 контроллера 200 исполняет инструкции для управления направлением проходки горной машины 150, когда горная машина 150 выполняет операцию врубки. В частности, электронный процессор 215 исполняет инструкции для выполнения способа 300, показанного на фиг. 7 для управления направлением проходки горной машины 150, когда горная машина 150 выполняет операцию врубки. Как показано на фиг. 7, способ 300 содержит этап, на котором электронный процессор 215, принимает данные с лидарного датчика 205 (блок 305). Электронный процессор 215 принимает данные с лидарного датчика 205 через интерфейс 225 ввода-вывода контроллера 200. Как отмечено выше, данные, принимаемые с лидарного датчика 205 связаны с окружающей горную машину 150 площадью. Окружающая горную машину 150 площадь может содержать заднее окружение горной машины 150, переднее окружение горной машины 150, одно или более окружений боковых сторон горной машины 150, другой окружение горной машины 150, или их комбинацию. В частности, данные, принимаемые с лидарного датчика 205 связаны с поверхностью ранее вырезанной горной выработки.
[38] Электронный процессор 215 определяет текущее направление проходки горной машины 150 на основе данных, принятых с лидарного датчика 205 (блок 310). Текущее направление проходки горной машины 150, также называемое измеренным направлением проходки, представляет текущий путь перемещения или траекторию перемещения горной машины 150. В некоторых вариантах осуществления электронный процессор 215 получает доступ к алгоритму анализа данных для определения текущего направления проходки горной машины 150. Алгоритм анализа данных может быть сохранен в запоминающем устройстве 220 контроллера 200 и исполнен электронным процессором 215, при этом данные с лидарных датчиков 205 вводят в алгоритм анализа данных. Через исполнение алгоритма анализа данных, электронный процессор 215 идентифицирует прямые линии по обеспеченным лидаром данным, которые соответствуют стенкам горной выработки (стенкам) (например, ʺидентифицированные объектыʺ). Соответственно, электронный процессор 215 может идентифицировать один или более объектов, как стенки горной выработки, которые являются достаточно прямыми, имеют достаточную длину, обнаружены для времени достаточной продолжительности, или их комбинацию. Альтернативно или в дополнение, в некоторых вариантах осуществления электронный процессор 215 определяет текущее направление проходки горной машины 150, применяя дополнительный или отличающийся подход обработки данных. Например, в некоторых вариантах осуществления электронный процессор 215 определяет текущее направление проходки горной машины 150, применяя алгоритм одновременной локализации и картирования (SLAM). После идентификации одного или более объектов электронный процессор 215 классифицирует идентифицированные объекты по степени достоверности. Степень достоверности может указывать уровень достоверности, связанный с классифицированием одного или более идентифицированных объектов, как являющихся, например, стенкой (стенками) выработки (например, стенки 255a и 255b) для уменьшения вероятности некорректного классифицирования (например, горного оборудования, человека и т.п.). Электронный процессор 215 может также измерять угол и расстояние до идентифицированных объектов относительно горной машины 150. На основе измеренного угла и расстояния до идентифицированного объекта электронный процессор 215 может делать окончательный вывод по текущему курсу, а также расстояние между горной машиной 150 и одной или более стенками горной выработки.
[39] Как предпоследний пример со ссылкой на фиг. 4, когда расстояние между горной машиной 150 и стенками 255a и 255b выработки является постоянным (как указано данными измерений одного или более лидарных датчиков 205c, 205b, 205c и 205d), электронный процессор 215 выполнен с возможностью определения, что горная машина 150 держит прямой курс в шахте горной выработки (текущее направление проходки). Другими словами, когда расстояние между горной машиной 150 и стенками 255a и 255b выработки является постоянным, горная машина 150 перемещается параллельно стенкам 255a и 255b выработки. Вместе с тем, когда расстояние между горной машиной 150 и стенкой 255а выработки уменьшается, а расстояние между горной машиной 150 и стенкой 255b выработки увеличивается, электронный процессор 215 выполнен с возможностью определения, что горная машина 150 имеет направление проходки влево (текущее направление проходки). Аналогично, когда расстояние между горной машиной 150 и стенкой 255а выработки увеличивается, а расстояние между горной машиной 150 и стенкой 255b выработки уменьшается, электронный процессор 215 выполнен с возможностью определения, что горная машина 150 имеет направление проходки вправо (текущее направление проходки). В некоторых рудниках с камерно-столбовой системой разработки, в общем требуется для элементов горной выработки быть параллельными или перпендикулярными. В некоторых вариантах осуществления текущее направление проходки может принимать форму точки или вектора на двух или трехкоординатной сетке рудника, с точкой или вектором, представляющими одно или более из следующего: требуемое положение, направление перемещения и скорость перемещения. Например, на фиг. 8 показана двумерная сетка координат рудника, генерируемая по данным, обнаруженным с применением лидарных датчиков 205.
[40] В некоторых вариантах осуществления электронный процессор 215 определяет текущее направление проходки горной машины 150 на основе дополнительных данных, собранных другими датчиками 210, такими как сверхширокополосные датчики, датчики изображения и т.п., связанными с горной машиной 150, в дополнение к данным, принимаемым с лидарного датчика 205. Например, электронный процессор 215 может принимать дополнительные данные с датчиков двигателей (других датчиков 210), такие как скорости и направления движения пары левой и правой гусениц 190a-b горной машины 150 (ʺданные направления проходкиʺ). Датчики двигателей могут содержать, например, преобразователи углового положения в код, оптические кодовые датчики, датчики тока, или датчики на эффекте Холла, функционально соединенные c двигателями 212, 213 левой и правой гусеницы и выполненные с возможностью обнаружения и выведения индикации углового положения двигателя, скорости и/или ускорения. Электронный процессор 215 может применять указанные дополнительные данные для дополнения данных, принимаемых с лидарного датчика 205, при определении текущего направления проходки горной машины 150. Альтернативно или в дополнение, данные, собранные другими датчиками 210, можно применять для улучшения точности и надежности данных, собранных, например, лидарными датчиками 205. Например, в некоторых вариантах осуществления данные, собранные другими датчиками 210, можно применять для улучшения точности и надежности измерений направления проходки, применяя обе группы, данные, принимаемые с лидарного датчика 205, и данные, собранные другими датчиками 210, как ввод в алгоритм сочетания различных датчиков (например, фильтр Калмана). Как другой пример, в некоторых вариантах осуществления дополнительные данные можно применять для повышения степени достоверности, связанной корректностью идентификации, одного или более идентифицируемых объектов (используемых для определения текущего направления проходки), например, как стенки 255а, 255b горной выработки.
[41] После определения текущего направления проходки горной машины 150, электронный процессор 215 сравнивает текущее направления проходки с направлением на цель проходки горной машины 150 (блок 315). Направление на цель проходки горной машины 150 представляет путь к цели или планируемое перемещение к цели или траекторию перемещения горной машины 150. В некоторых вариантах осуществления направление на цель проходки может принимать форму ряда точек или векторов на двумерной или трехмерной координатной сетке рудника, с точками или векторами, представляющими одно или более из требуемых положений, направлений перемещения и скоростей перемещения. В некоторых вариантах осуществления направление на цель проходки горной машины 150 сохраняют в запоминающем устройстве 220 контроллера 200. Направление на цель проходки оператор может вводить и сохранять посредством клавиатуры, сенсорного экрана, или других устройств ввода-вывода, соединенных c интерфейсом 225 ввода-вывода, или может быть принимать и сохранять из удаленного вычислительного устройства, поддерживающего связь с контроллером 200 через интерфейс 225 ввода-вывода и сеть (например, интернет или локальную сеть). Соответственно, электронный процессор 215 может получать доступ к направлению на цель проходки горной машины 150 из запоминающего устройства 220.
[42] На основе сравнения текущего направления проходки горной машины 150 и направления на цель проходки горной машины 150 электронный процессор 215 определяет, следует ли горная машина 150 в направлении на цель проходки горной машины 150. Другими словами, электронный процессор 215 может определить имеет ли горная машина 150 отклонение от направления на цель проходки горной машины 150. Горная машина 150 имеет отклонение от направления на цель проходки горной машины 150, когда текущее направление проходки варьируется (или отличается от) направления на цель проходки горной машины 150.
[43] В ответ на текущее направление проходки, отличающееся от направления на цель проходки горной машины 150 на заданную величину, электронный процессор 215 управляет горной машиной 150 для корректировки текущего направления проходки горной машины 150 (блок 320). Другими словами, в ответ на определенную разницу между текущим направлением проходки горной машины 150 и направлением на цель проходки горной машины 150 электронный процессор 215 управляет горной машиной 150 для внесения поправки с учетом разницы. В некоторых вариантах осуществления заданная величина является любой величиной или наименьшей возможной не нулевой величиной для точности применяемого измерения. Соответственно, в данных вариантах осуществления, когда текущее направление проходки определено, как отличающееся от направления на цель проходки горной машины 150 на любую величину (в примере, когда имеется какое-либо расхождение), электронный процессор 215 управляет горной машиной 150 для корректировки текущего направления проходки горной машины 150 (блок 320). Например, электронный процессор 215 может вычесть цифровые представления направления на цель проходки из текущего направления проходки (или наоборот) в блоке 315. Другими словами, в блоке 315, электронный процессор 215 может определить разницу между текущим направлением проходки и направлением на цель проходки горной машины 150 (величину разницы). Затем, (a) когда результат вычитания равен нулю, указывая, что направление на цель проходки и текущее направление проходки совпадают, электронный процессор 215 не управляет горной машиной 150 для корректировки текущего направления проходки горной машины 150 (например, электронный процессор 215 вместо этого возвращается в блок 305), и (b) когда результ является не нулевым, указывая, по меньшей мере некоторое расхождение между направлением на цель проходки и текущим направлением проходки, электронный процессор 215 управляет горной машиной 150 для корректировки текущего направления проходки горной машины 150 (блок 320). В некоторых вариантах осуществления выбирают не нулевую величину, как заданную величину, так что некоторое расхождение между направлением на цель проходки и текущим направлением проходки является допустимым до автоматического управления электронным процессором 215 горной машиной 150 для корректировки текущего направления проходки горной машины 150.
[44] В некоторых вариантах осуществления электронный процессор 215 автоматически управляет горной машиной 150 для корректировки текущего направления проходки горной машины 150 посредством управления одним или более компонентами горной машины 150. Например, электронный процессор 215 может управлять левой гусеницей 190a (посредством двигателя 212 левой гусеницы), правой гусеницей 190b (посредством двигателя 213 правой гусеницы) или обеими для корректировки текущего направления проходки горной машины 150. В качестве другого примера, электронный процессор 215 может управлять двигателями 211 врубовой системы для компенсации разницы между текущим направлением проходки горной машины 150 и направлением на цель проходки горной машины 150. Например, электронный процессор 215 может управлять двигателями 211 врубовой системы для смещения положения резцов 160 вертикально или горизонтально для врубки ближе к направлению на цель проходки.
[45] В некоторых вариантах осуществления электронный процессор 215 управляет горной машиной 150 на основе величины разницы между направлением на цель проходки горной машины 150 и текущим направлением проходки горной машины 150. Например, чем больше величина разницы, тем больше управляющая корректировка электронного процессора 215 для управления горной машиной 150. В отличие от этого, чем меньше величина разницы, тем меньше управляющая корректировка электронного процессора 215 для управления горной машиной 150. Другими словами, величина управляющей корректировки пропорциональна величине разницы в некоторых вариантах осуществления.
[46] В некоторых вариантах осуществления контроллер 200 является частью бортовой системы управления горной машиной 150. Бортовая система управления собирает данные с лидарных датчиков 205, других датчиков 210 или их комбинации для управления в режиме реального времени горной машиной 150.
[47] В некоторых вариантах осуществления электронный процессор 215 сохраняет данные, принятые с лидарного датчика 205, других датчиков 210 или их комбинации в запоминающем устройстве 220 контроллера 200. Кроме того, электронный процессор 215 может оценивать данные, принятые с лидарного датчика 205, других датчиков 210 или их комбинация для идентификации релевантных элементов горной выработки и удаления нерелевантных данных.
[48] В некоторых вариантах осуществления электронный процессор 215 применяет текущее направление проходки, расстояние между горной машиной 150 и по меньшей мере одной из стенок 255a или 255b горной выработки, или их комбинацию, как механизм обратной связи для систематической погрешности дифференциала гусениц машины. Например, механизм обратной связи может обеспечивать комплекту левой и правой гусеницы 190a-b поддержание отличающихся скоростей, что может быть необходимо для поддержания согласованного направления врубки для горной машины 150 (например, когда горная машина 150 находится в условиях присутствия боковых сил, генерируемых режущим воздействием на пропласток) и корректировки любого измеренного отклонения от требуемого направления врубки (в примере, направление на цель проходки горной машины 150).
[49] Альтернативно или в дополнение, в некоторых вариантах осуществления необработанные данные (например, текущего направления проходки горной машины 150 и расстояния между горной машиной 150 и по меньшей мере одной из стенок 255a или 255b горной выработки) могут быть наложены на видеоизображение, фотоизображение или т.п., например, горной машиной 150 (например, контроллером 200) или системой управления с удаленным оператором. Наложенные видео или фото изображения могут быть обеспечены оператору на удаленной площадке (например, на электронном дисплее системы управления оператора) для лучшего понимания ситуации в горных работах. Оператор может здесь управлять горной машиной дистанционно (например, передавая управляющие сигналы на контроллер 200 через интерфейс 225 ввода-вывода) на основе лучшего понимания ситуации в горных работах. Например, как отмечено выше, электронный процессор 215 может автоматически управлять горной машиной 150 (управление направлением проходки горной машины 150). Вместе с тем, в некоторых вариантах осуществления оператор может блокировать автоматическое управление горной машины 150, выполняемое электронным процессором 215. Оператор может блокировать автоматическое управление горной машины 150, применяя, например, наложенные видео или фото изображения, описанные выше.
[50] Как отмечено выше, в некоторых вариантах осуществления текущее направление проходки горной машины 150 может принимать форму точки или вектора в двумерной или трехмерной координатной сетке рудника, где точка или вектор представляют одно или более из требуемого: положения, направления перемещения и скорости перемещения. Соответственно, в некоторых вариантах осуществления двумерная или трехмерная координатная сетка рудника (в том числе точка или вектор, представляющие текущее направление проходки горной машины 150) могут быть обеспечены оператору на удаленной площадке для лучшего понимания ситуации в горных работах (через электронный дисплей). В некоторых вариантах осуществления оператор на удаленной площадке может применять двумерную или трехмерную координатную сетку рудника (содержащую точку или вектор, представляющие текущее направление проходки горной машины 150) для блокирования автоматического управления горной машиной 150, выполняемого электронным процессором 215.
[51] Хотя это не показано на фиг. 5, в некоторых вариантах осуществления после этапа 320 электронный процессор 215 возвращается к началу цикла на этап 305 для обеспечения непрерывного управления направлением проходки горной машины. Дополнительно, хотя не показано на фиг. 5, в некоторых вариантах осуществления после этапа 315, когда текущее направление проходки не отличается от направления на цель проходки на заданную величину, электронный процессор 215 возвращается к началу цикла на этап 305 для обеспечения непрерывного управления направлением проходки горной машины. Например, электронный процессор обеспечивает непрерывное управление направлением проходки горной машины посредством приема ʺобновленныхʺ данных с одного или более лидарных датчиков 205 и выполняя операции одного или более этапов, включенных в состав способа 300 фиг. 5, применяя ʺобновленныеʺ данные.
[52] Соответственно, варианты осуществления, описанные в данном документе обеспечивают способы и системы для управления направлением проходки горной машины, когда горная машина выполняет операцию врубки. В частности, способы и системы, описанные в данном документе, обеспечивают управление направлением проходки горной машины посредством определения направления проходки относительно конструкций рудника сзади машины, которые измеряют установленные на машине лидарные датчики. Другими словами, способы и системы, описанные в данном документе, обеспечивают управление направлением проходки горной машины, не требуя каких либо внешних (вне машины) датчиков или инфраструктуры рудника, такой как навигационные знаки, которые представляют проблемы для эксплуатации рудников.
Реферат
Изобретение относится к способам и системам для управления направлением проходки горной машины, когда горная машина выполняет операцию врубки. Система содержит врубовую систему горной машины, множество гусениц горной машины, содержащее левую гусеницу и правую гусеницу. Лидарный датчик, установленный на горной машине, причем лидарный датчик выполнен с возможностью испускания светового импульса к поверхности ранее вырезанной горной выработки и приема светового импульса, отраженного обратно от поверхности ранее вырезанной горной выработки. Электронный процессор, выполненный с возможностью: приема данных с лидарного датчика на основе светового импульса, принятого лидарным датчиком, определения текущего направления проходки горной машины на основе данных, принятых с лидарного датчика, сравнения текущего направления проходки с направлением на цель проходки горной машины, в ответ на текущее направление проходки, отличающееся от направления на цель проходки горной машины на заданную величину, управления горной машиной для корректировки текущего направления проходки горной машины, при этом электронный процессор выполнен с возможностью управления горной машиной для корректировки текущего направления проходки горной машины посредством управления по меньшей мере одним, выбранным из группы, состоящей из левой гусеницы и правой гусеницы. Технический результат заключается в повышении точности позиционирования врубовой машины. 2 н. и 18 з.п. ф-лы, 12 ил.
Комментарии