Автоматизированное устройство и способы для наклонно-направленного бурения - RU2471980C2
Код документа: RU2471980C2
Чертежи




















Описание
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В начале процесса бурения бурильщики обычно разрабатывают план бурения, который включает целевое местоположение и траекторию бурения к целевому местоположению. После начала бурения оборудование низа бурильной колонны направляют или "отклоняют" от вертикального курса бурения в любом направлении, следуя предложенному плану бурения. Например, для добычи нефти или газа из подземного месторождения план бурения может включать вертикальную скважину в точке над продуктивным пластом, затем наклонно-направленную или горизонтальную скважину, которая проникает в месторождение. Затем оператор может направлять бурение и по вертикали, и по горизонтали, в соответствии с планом.
В некоторых вариантах осуществления такое наклонно-направленное бурение требует точной ориентации изогнутого сегмента забойного двигателя, который приводит в движение буровую коронку. В таких вариантах осуществления вращение бурильной колонны изменяет ориентацию изогнутого сегмента и торца долота. Для эффективного управления агрегатом оператор должен сначала определить текущую ориентацию торца долота, например, посредством устройства для "измерений при бурении" (ИПБ). После этого, если направление бурения необходимо отрегулировать, оператор должен повернуть бурильную колонну для изменения ориентации торца бурового долота. В других вариантах осуществления, например в ротационных управляемых системах, оператор еще должен определить текущую ориентацию торца долота.
В процессе бурения инклинометрические замеры, идентифицирующие данные о положении и направлении оборудования низа бурильной колонны (ОНБК) в скважине, получают в различные промежутки времени. Каждое измерение инклинометрии дает значения наклона и азимута (или компасного курса) положения в скважине (обычно полная глубина во время измерения). В наклонно-направленных стволах скважин, в частности, положение ствола скважины должно быть известно с достаточной точностью, чтобы гарантировать правильную траекторию ствола скважины. Сами измерения включают отклонение от вертикали и азимут ствола скважины. В дополнение к данным по торцу долота, а также наклону и азимуту данные, полученные в процессе каждого измерения инклинометрии, могут также включать, например, данные по глубине скважины, данные по вращению колонны, данные по нагрузке на крюке, данные по перепаду давления (через забойный двигатель), а также смоделированные данные по изгибу ствола.
Указанные измерения могут быть сделаны в отдельных точках в скважине, и приблизительная траектория ствола скважины может быть определена на основе указанных отдельных точек. Обычно стандартные измерения инклинометрии проводят в каждом соединении бурильной трубы, чтобы получить точное измерение наклона и азимута для нового положения инклинометрии. Однако если операции наклонно-направленного бурения требуют одного или более переходов между передвижением и вращением в пределах интервала одного звена или замка бурильной трубы, бурильщик не может полагаться на новые измерения инклинометрии для точной оценки продвижения или эффективности операции. Например, бурильщик не может использовать новые данные инклинометрии для оценки эффективности или точности "безроторного" бурения, начатого после того, как были получены инклинометрические данные. Обычное применение измерений инклинометрии не предоставляет технологу по наклонно-направленному бурению какой-либо обратной связи по продвижению или эффективности операций, выполняемых после получения новых инклинометрических данных.
Когда происходит отклонение от запланированной траектории бурения, бурильщики должны изучить доступные для них факторы, чтобы пробовать вернуть направление бурения к исходной траектории. Обычно это требует, чтобы оператор управлял тормозом буровой лебедки и вращал стол ротора или шпиндель верхнего привода, чтобы найти точные комбинации нагрузки на крюке, перепада давления забойного двигателя и крутящего момента на бурильной колонне для должного размещения торца долота. Это может быть тяжелым, трудоемким и сложным процессом. Каждое регулирование производит различные эффекты относительно ориентации торца долота, и каждый нужно рассматривать в комбинации с другими нормативами бурения при бурении скважины. Таким образом, переориентировка торца долота в скважине является очень сложной, трудоемкой и зачастую неточной. Поэтому необходим более эффективный, надежный способ управления ОНБК.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В одном варианте настоящее описание направлено на способ бурения к целевому местоположению, который включает получение исходных данных, включающих планируемую траекторию бурения к целевому местоположению, и определение прогнозируемого положения оборудования низа бурильной колонны в буровой системе. Прогнозируемое местоположение оборудования низа бурильной колонны сравнивают с планируемой траекторией бурения и создают измененную траекторию бурения к целевому местоположению. Создаются сигналы управления буровой установки, обычно на поверхности скважины, которые направляют оборудование низа бурильной колонны буровой системы к целевому местоположению по измененной траектории бурения.
В одном варианте создание измененной траектории бурения к целевому местоположению включает вычисление кривых от прогнозируемого местоположения оборудования низа бурильной колонны, которые пересекают планируемую траекторию бурения. В другом варианте создание измененной траектории бурения к целевому местоположению включает вычисление новой планируемой траектории бурения, которая не пересекает планируемую траекторию бурения и которая направлена от прогнозируемого положения оборудования низа бурильной колонны к целевому местоположению, способ также включает повторное определение прогнозируемого положения оборудования низа бурильной колонны буровой системы. Прогнозируемое положение оборудования низа бурильной колонны сравнивают с новой измененной траекторией бурения и создают вторую измененную траекторию бурения к целевому местоположению. Один или более сигналов управления буровой установки автоматически и с помощью электроники создаются на поверхности скважины, которые направляют оборудование низа бурильной колонны буровой системы по второй измененной траектории бурения к целевому местоположению.
В одном варианте определение прогнозируемого положения оборудования низа бурильной колонны включает определение прогнозируемого положения бурового долота оборудования низа бурильной колонны, и определение прогнозируемого положения бурового долота включает рассмотрение данных от одного или более результатов измерений инклинометрии.
В одном варианте создание измененной траектории бурения на основе того, превышает ли величина отклонения от запланированной траектории пороговую величину, включает создание измененной траектории бурения, которая пересекает заданную траекторию бурения, если величина отклонения от заданной траектории превышает первую пороговую величину отклонения, и создание измененной траектории бурения, которая не пересекает заданную траекторию бурения, если величина отклонения от заданной траектории превышает вторую пороговую величину отклонения. Способ может включать получение входных данных, инициированных пользователем, указывающих, создавать ли новую заданную траекторию к цели, которая не пересекает заданную траекторию бурения, когда отклонение оборудования низа бурильной колонны превышает вторую пороговую величину отклонения от заданной траектории.
В одном варианте заданная траектория бурения включает зону допуска, и создание измененной траектории бурения осуществляется, когда прогнозируемое положение оборудования низа бурильной колонны пересекает границу зоны допуска, и не осуществляется, когда прогнозируемое положение оборудования низа бурильной колонны находится в пределах зоны допуска. В другом варианте способ включает вычисление инклинометрического значения торца долота и измеренной глубины, требуемой для направления оборудования низа бурильной колонны к целевому местоположению.
В одном варианте создание измененной траектории бурения к целевому местоположению включает вычисление первой трехмерной кривой, вычисление удерживаемой секции и необязательно вычисление второй трехмерной кривой. Первые и необязательные вторые трехмерные кривые могут быть частью измененной траектории бурения. Необязательная вторая трехмерная кривая может соединять измененную траекторию с исходной, заданной траекторией бурения в положении перед целевым местоположением. В предпочтительном варианте осуществления настоящего изобретения все вычисления кривой выполняются с помощью электроники, например с помощью компьютера или другого подходящего логического устройства, как описано в настоящей заявке.
В одном варианте способ включает определение зоны допуска, пороговой зоны и зоны коррекции вблизи заданной траектории бурения. Сравнение прогнозируемого положения оборудования низа бурильной колонны с заданной траекторией бурения включает определение того, какая зона содержит определенное прогнозируемое положение оборудования низа бурильной колонны. После создания измененной траектории бурения к целевому местоположению определяют новую зону допуска, новую пороговую зону и новую коррекции вблизи измененной траектории бурения.
В одном варианте определение прогнозируемого положения оборудования низа бурильной колонны включает использование инклинометрической проекции в реальном времени в качестве ориентира. Проекцию в реальном времени выполняют, используя способ, включающий, по меньшей мере, одно из кривой минимального радиуса, направляющих ориентировок и прямой линии. Проекция в реальном времени может включать ввод ориентации торца долота.
В одном варианте способ включает создание измененной траектории бурения к целевому местоположению, которое включает вычисление первой трехмерной кривой, удерживаемой секции и необязательной второй трехмерной кривой, которая направляет оборудование низа бурильной колонны по заданной траектории бурения. Первые и необязательные вторые трехмерные кривые могут быть вычислены, предпочтительно с помощью электроники, путем вычисления любых кривых, требуемых для пересечения заданной траектории бурения в целевом местоположении, вычисления любых кривых, требуемых для пересечения заданной траектории бурения в первом положении перед целевым местоположением. Каждая кривая может иметь приемлемый уровень кривизны для ОНБК. Кривые могут быть также вычислены, предпочтительно с помощью электроники, путем вычисления любых кривых, требуемых для пересечения заданной траектории бурения во втором положении перед первым положением, причем все кривые имеют приемлемый уровень кривизны, первое и второе положение разделены выбранным расстоянием измерения, и выбора расчетных кривых, которые пересекают заданную траекторию в первом положении перед достижением целевого местоположения.
В другом варианте настоящее изобретение создает систему для бурения до целевого местоположения, содержащую приемное устройство, предназначенное для приема входных данных, включающих заданную траекторию бурения до целевого местоположения, сенсорное устройство для определения прогнозируемого положения оборудования низа бурильной колонны буровой системы, первое логическое устройство для сравнения прогнозируемого положения оборудования низа бурильной колонны с заданной траекторией бурения для определения величины отклонения от заданной траектории, второе логическое устройство для создания измененной траектории бурения к целевому местоположению, выбранной на основе величины отклонения от заданной траектории бурения, генератор сигнала управления буровой установки для автоматизированного и электронного создания одного или более сигналов управления буровой установки на поверхности скважины, которые направляют оборудование низа бурильной колонны буровой системы к целевому местоположению по измененной траектории бурения.
В одном варианте система включает привод буровой лебедки, верхний привод и буровой насос. Генератор сигнала управления передает один или несколько сигналов для управления буровой лебедкой, верхним приводом и буровым насосом с целью изменения направления оборудования низа бурильной колонны в процессе бурения. В одном варианте второе логическое устройство создает измененную траекторию бурения на основе того, превышает ли величина отклонения от заданной траектории пороговое значение, и включает приспособление для создания измененной траектории бурения, которая пересекает заданную траекторию бурения, если величина отклонения от заданной траектории превышает первую пороговую величину отклонения от заданной траектории, и приспособление для создания измененной траектории бурения, которая не пересекает заданную траекторию бурения, если величина отклонения от заданной траектории превышает вторую пороговую величину отклонения от заданной траектории.
В другом варианте настоящее изобретение создает способ направленного управления оборудованием низа бурильной колонны в процессе бурения от буровой установки до подземного целевого местоположения, содержащий следующие этапы: разработка плана бурения, включающего траекторию бурения и допустимую погрешность в качестве зоны допуска; получение данных, характеризующих одну или более направляющих ориентировок и прогнозируемую глубину долота; определение фактического местоположения оборудования низа бурильной колонны на основе одной или более направляющих ориентировок и проекции глубины долота; определение, находится ли буровое долото в пределах зоны допуска, сравнение фактического местоположения оборудования низа бурильной колонны с заданной траекторией бурения для определения величины отклонения от заданной траектории оборудования низа бурильной колонны фактической траектории бурения и создание измененной траектории бурения на основе величины отклонения от заданной траектории, которое включает создание измененной траектории бурения, которая пересекает заданную траекторию бурения, если величина отклонения от заданной траектории превышает первую пороговую величину отклонения от заданной траектории, и создание измененной траектории бурения к целевому местоположению, которое не пересекает заданную траекторию бурения, если величина отклонения от заданной траектории превышает вторую пороговую величину отклонения от заданной траектории. Способ также включает определение желаемой ориентации торца долота с целью направления оборудования низа бурильной колонны по измененной траектории бурения, автоматизированное и электронное создание одного или более сигналов управления буровой установкой на поверхности скважины в блоке управления и подачу одного или более сигналов управления буровой установки к буровой лебедке и верхнему приводу для направления оборудования низа бурильной колонны по измененной траектории бурения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Наилучшим образом настоящее описание можно понять из последующего подробного описания, рассматриваемого вместе с сопровождающими фигурами. Следует подчеркнуть, что в соответствии с общепринятой практикой в промышленности, различные детали не показаны в масштабе. Фактически, размеры различных деталей могут быть необязательно увеличены или уменьшены для ясности описания.
Фиг. 1 является схематическим изображением буровой установки согласно одному или более аспектам настоящего описания.
Фиг. 2А и 2B являются блок-схемами способов согласно одному или более аспектам настоящего описания.
Фиг. 3 является схемой устройства согласно одному или более аспектам настоящего описания.
Фиг. 4A-4C являются схемами установок согласно одному или более аспектам настоящего описания.
Фиг. 5A является блок-схемой способа согласно одному или более аспектам настоящего описания.
Фиг. 5B является изображением цилиндрической зоны допуска вокруг траектории бурения.
Фиг. 6A является блок-схемой способа согласно одному или более аспектам настоящего описания.
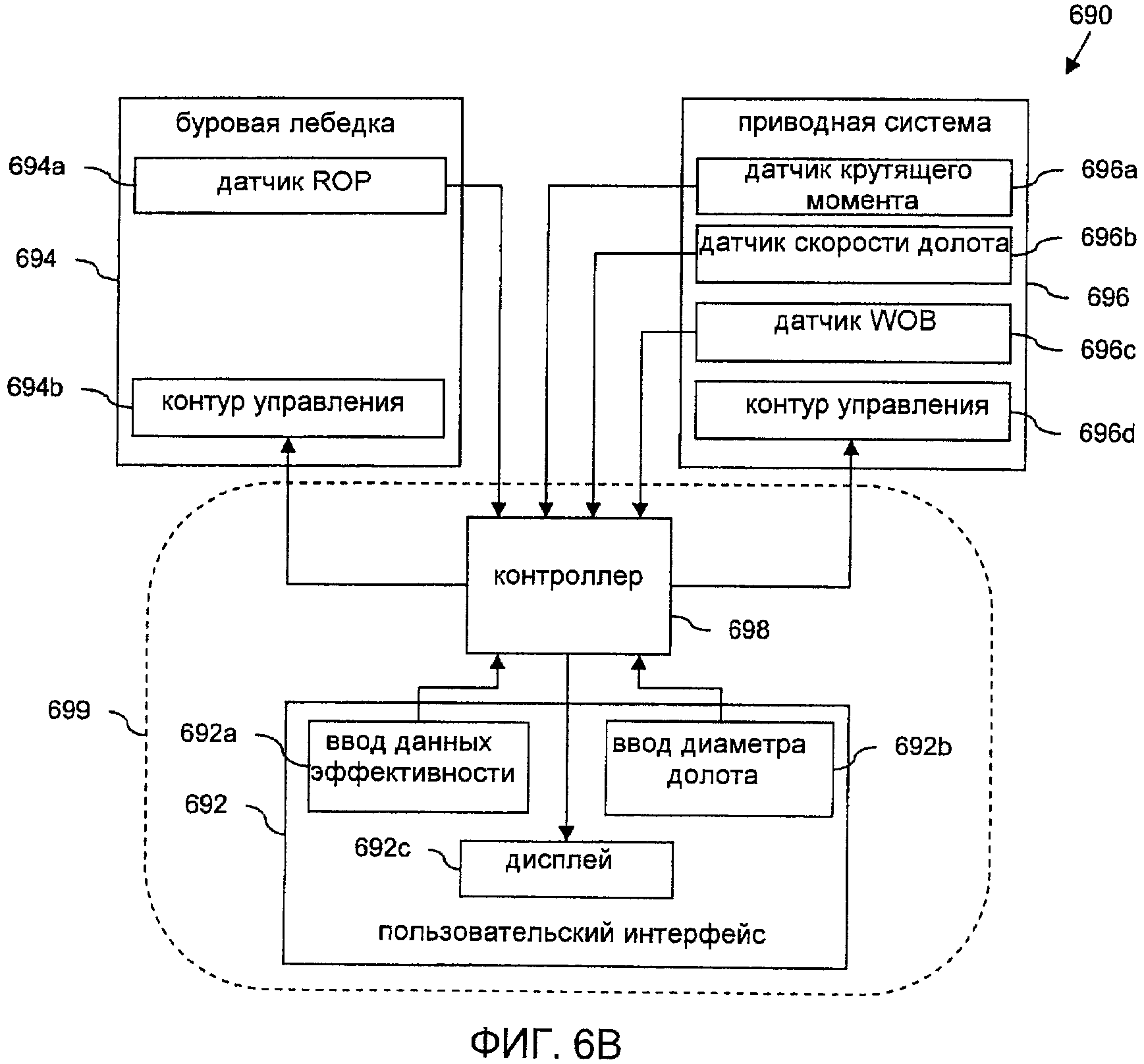
Фиг. 6B является схемой устройства согласно одному или более аспектам настоящего описания.
Фиг. 6C-6D являются блок-схемами способов согласно одному или более аспектам настоящего описания.
Фиг. 7A-7C являются блок-схемами способов согласно одному или более аспектам настоящего описания.
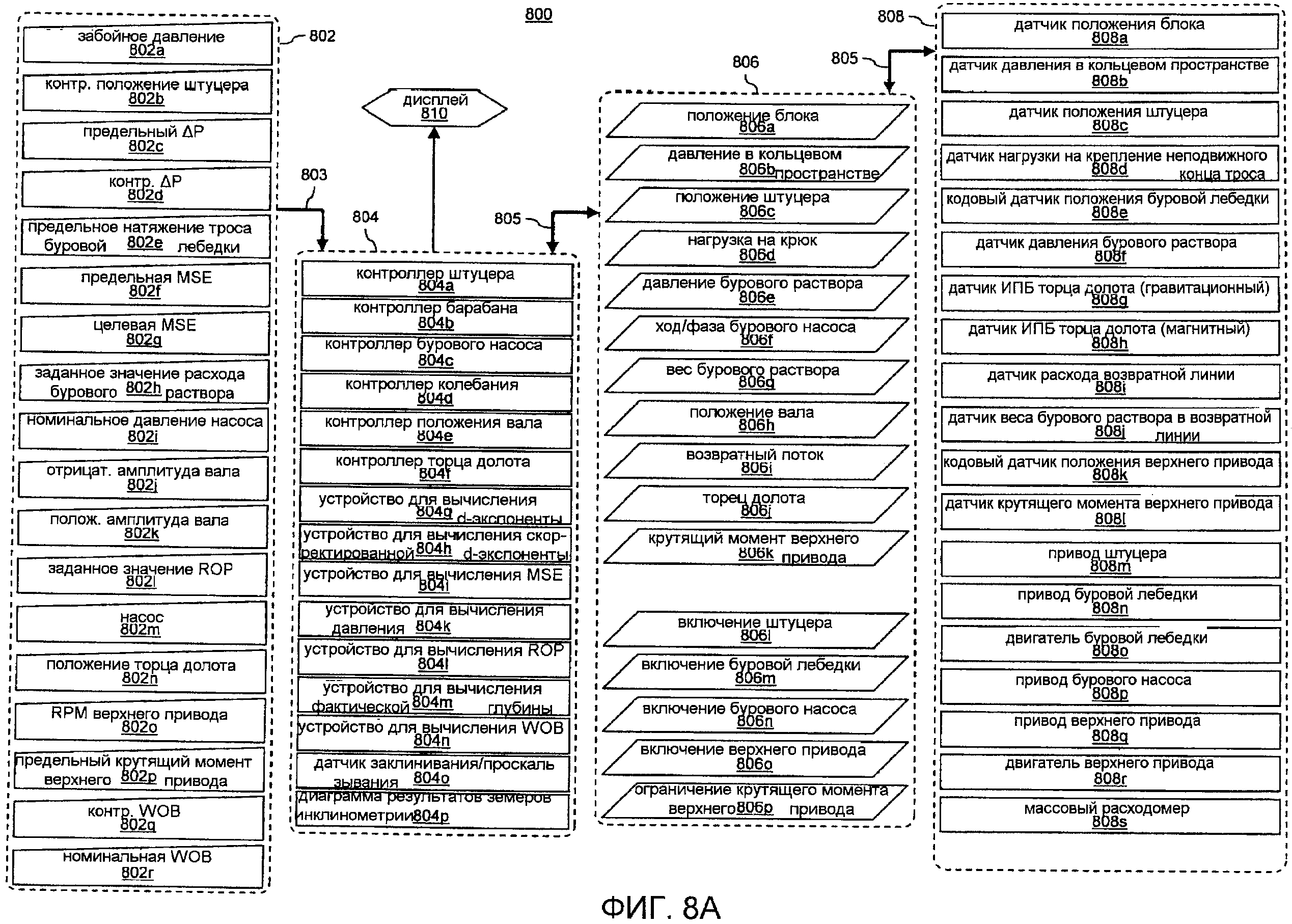
Фиг. 8A-8B является схемой установок согласно одному или более аспектам настоящего описания.
Фиг. 8C является блок-схемой способа согласно одному или более аспектам настоящего описания.
Фиг. 9A-9B являются блок-схемами способов согласно одному или более аспектам настоящего описания.
Фиг. 10A-10B являются схемами устройства индикации согласно одному или более аспектам настоящего описания.
Фиг. 11 является схемой устройства согласно одному или более аспектам настоящего описания.
ПОДРОБНОЕ ОПИСАНИЕ
Следует понимать, что настоящее описание обеспечивает много различных вариантов осуществления или примеров осуществления различных признаков различных вариантов осуществления. Конкретные примеры элементов и конфигураций описаны ниже с целью упрощения настоящего описания. Конечно, они являются лишь примерами и не ограничивают настоящее изобретение. Кроме того, в настоящем описании могут повторяться номера и/или буквы позиций в различных примерах. Данное повторение применяется в целях простоты и ясности и само по себе не определяет отношения между различными описанными вариантами осуществления и/или конфигурациями. Кроме того, формирование первого признака или второго признака в описании ниже может включать варианты осуществления, в которых первый и второй признаки сформированы в непосредственном контакте, и могут также включать варианты осуществления, в которых могут быть сформированы дополнительные признаки, включающие первый и второй признаки, причем первый и второй признаки могут и не находиться в непосредственном контакте.
Системы и способы, раскрытые в настоящей заявке, обеспечивают улучшенное управление ОНБК, что приводит к улучшенному отклику ОНБК и более быстрой работе ОНБК по сравнению с обычными системами, которые значительно чаще требуют ручного ввода данных или остановок для выполнения ввода данных. Изобретение предпочтительно может обеспечивать это посредством обратной информационной связи и обнаружения местоположения, обработки полученных данных, а также оптимизации траектории бурения на основе прогнозируемого, фактического положения долота. Перед бурением обычно идентифицируют целевое местоположение и устанавливают оптимальный профиль ствола скважины или заданную траекторию. Такие предполагаемые траектории бурения в большинстве случаев основаны на наиболее эффективной траектории, ведущей к целевому местоположению или местоположениям. В процессе начала бурения ОНБК может начать отклоняться от оптимальной заданной траектории бурения вследствие одного или нескольких различных факторов. Системы и способы, раскрытые в настоящей заявке, предназначены для обнаружения отклонения от заданной траектории и введения корректировок с целью возвращения ОНБК на траекторию бурения или, если более эффективно, выработать альтернативную траекторию бурения, ведущую к целевому местоположению, предпочтительно максимально эффективным методом, предпочтительно избегая избыточной корректировки.
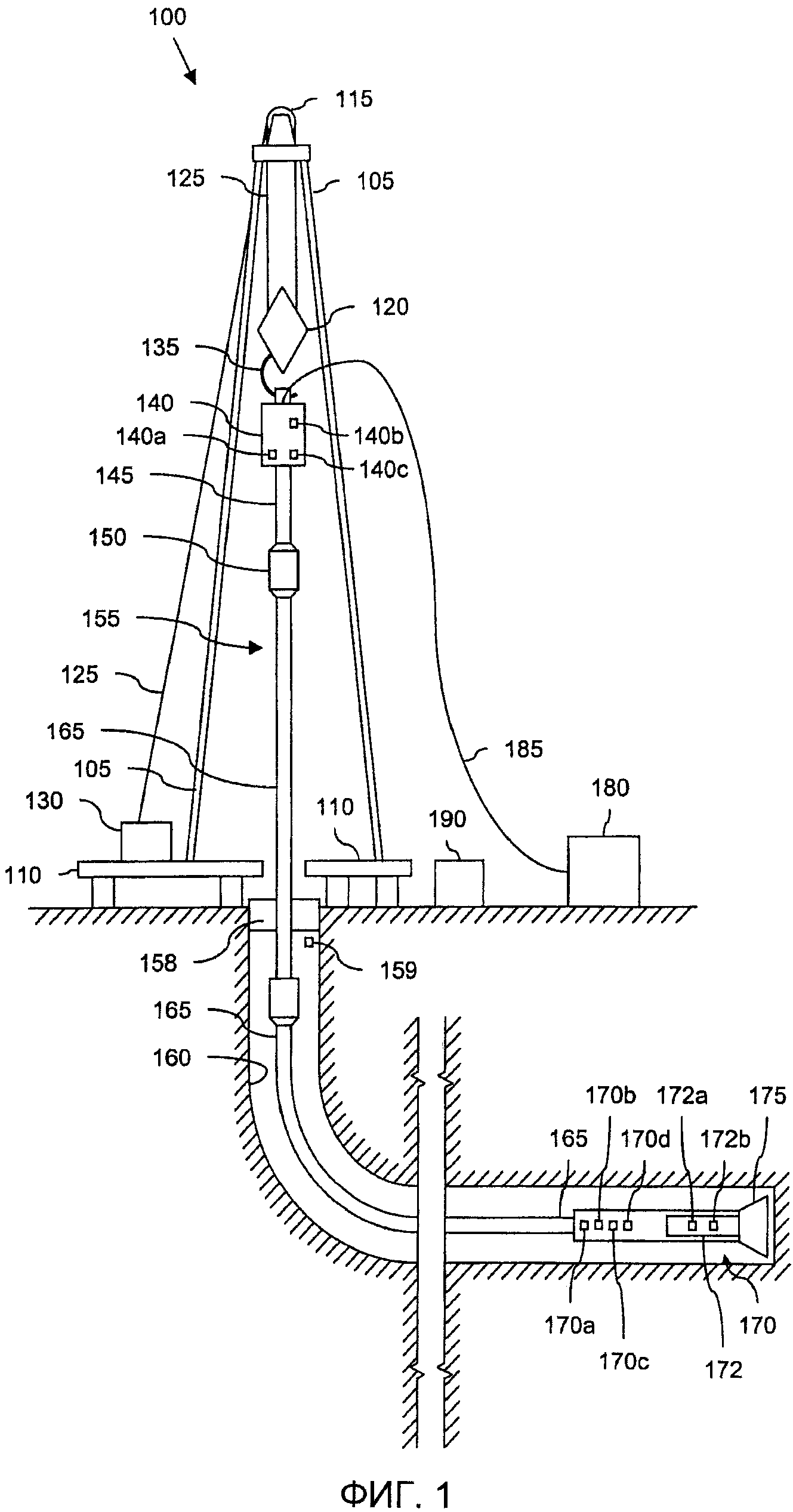
На фиг. 1 схематически изображено устройство 100 согласно одному или более аспектам настоящего описания. Устройство 100 является или включает наземную буровую установку. Впрочем, один или более аспектов настоящего описания применимы или могут быть легко адаптированы к буровой установке любого типа, например к самоподъемной буровой установке, полупогружным буровым установкам, буровым судам, буровым установкам с гибкими насосно-компрессорными трубами, установкам для подземного ремонта скважин, приспособленным к буровым и/или ремонтным операциям, а также буровым установкам на обсадных трубах, которые, среди прочих, включены в объем настоящего описания.
Устройство 100 включает опору 105, поддерживающую подъемный механизм над полом буровой установки 110. Подъемный механизм включает кронблок 115 и подвижный блок 120. Кронблок 115 установлен на или вблизи верхней части опоры 105, а подвижный блок 120 подвешен через кронблок 115 на буровом тросе 125. Один конец бурового троса 125 тянется от подъемного механизма до буровой лебедки 130, которая разматывает и сматывает буровой трос 125, что вызывает спуск и подъем подвижного блока 120 относительно пола буровой установки 110. Другой конец бурового троса 125, известный как крепление неподвижного конца, зафиксирован в неподвижном положении, по возможности вблизи буровой лебедки 130 или в другом месте на буровой установке.
Крюк 135 присоединен к нижней части подвижного блока 120. Верхний привод 140 подвешен на крюке 135. Вал 145, который тянется от верхнего привода 140, присоединен к предохранительному переводнику 150, который присоединен к бурильной колонне 155, подвешенной в стволе скважины 160. В альтернативе вал 145 может быть присоединен к бурильной колонне 155 непосредственно.
Термин "вал", используемый в настоящей заявке, не ограничивается элементом, который непосредственно тянется от верхнего привода или который иначе обычно называется как вал. Например, в рамках настоящего описания "вал" может дополнительно или альтернативно включать главный вал, ведущий вал, выводной вал и/или другой элемент, который передает крутящий момент, положение и/или вращение от верхнего привода к бурильной колонне, по меньшей мере, косвенно, или другой вращаемый приводной элемент. Тем не менее, хотя всего лишь ради ясности и краткости, указанные элементы могут быть вместе обозначены в настоящей заявке как "вал".
Бурильная колонна 155 включает соединенные секции бурильной трубы 165, оборудование 170 низа бурильной колонны (ОНБК) и буровое долото 175. Оборудование низа бурильной колонны 170 может включать стабилизаторы, утяжеленные бурильные трубы и/или оборудование для измерения при бурении (ИПБ) или спускаемое на тросе, среди прочих элементов. Буровое долото 175, которое может быть также обозначено в настоящей заявке как инструмент, присоединено к нижней части ОНБК 170 или присоединено к бурильной колонне 155 другим способом. Один или более насосов 180 могут подавать буровой раствор в бурильную колонну 155 через гибкую трубу или другой трубопровод 185, который может быть соединен с верхним приводом 140.
Скважинные ИПБ или подаваемые на тросе инструменты могут быть предназначены для оценки физических параметров, таких как давление, температура, крутящий момент, нагрузка на долото (WOB), вибрация, наклон, азимут, ориентация торца долота в трехмерном пространстве и/или другие параметры в скважине. Указанные измерения могут быть выполнены в скважине, данные сохранены в твердотельной памяти на некоторое время и загружены из инструмента (инструментов) на поверхность и/или переданы на поверхность в режиме реального времени. Методы передачи данных могут включать, например, перевод данных в цифровую форму и передачу кодированных данных на поверхность, по возможности в форме импульсов давления в буровом растворе или системе циркуляции бурового раствора, передачу звуковых сигналов через бурильную колонну 155, электронную передачу через трос или гибкую трубу и/или передачу в форме электромагнитных импульсов. Инструменты ИПБ и/или другие части ОНБК 170 могут обладать способностью хранения данных, полученных при измерениях, для последующего извлечения через трос и/или когда ОНБК 170 поднимают из ствола скважины 160.
В примере осуществления устройство 100 может также включать вращаемый противовыбросовый превентор 158, например, если скважину 160 бурят с использованием методов бурения при отрицательной депрессии или регулируемом давлении. В таком варианте осуществления буровой раствор и шлам из кольцевого пространства могут под давлением подаваться на поверхность, при этом фактический требуемый расход и давление по возможности регулируются системой штуцеров, а текучая среда и давление удерживаются в устье скважины и направляются вниз по нагнетательному трубопроводу в штуцер посредством вращаемого BOP 158. Устройство 100 может также включать датчик давления в кольцевом пространстве технической колонны 159, предназначенный для измерения давления в кольцевом пространстве между, например, стволом скважины 160 (или обсадной колонной в нем) и бурильной колонной 155.
В примере осуществления, показанном на фиг. 1, верхний привод 140 используется для передачи вращательного движения бурильной колонне 155. Впрочем, аспекты настоящего описания также могут быть применены или легко адаптированы к вводу в эксплуатацию с использованием других систем привода, таких как приводной вертлюг, роторный стол, установка с непрерывной колонной, забойный двигатель и/или обычная роторная буровая установка, среди других.
Устройство 100 также включает контроллер 190, предназначенный для управления или содействия в управлении одним или несколькими элементами устройства 100. Например, контроллер 190 может служить для передачи сигналов оперативного управления к буровой лебедке 130, верхнему приводу 140, ОНБК 170 и/или насосу 180. Контроллер 190 может являться автономным элементом, установленным вблизи опоры 105 и/или других элементов устройства 100. В примере осуществления контроллер 190 включает одну или несколько систем, расположенных в контроллерной, расположенной рядом с устройством 100, такой как универсальная кабина, часто называемая "будкой", которая служит помещением для хранения различного оборудования, офисом, центром связи и местом для общих собраний. Контроллер 190 может служить для передачи сигналов оперативного контроля к буровой лебедке 130, верхнему приводу 140, ОНБК 170 и/или насосу 180 через проводные или беспроводные средства передачи, которые, в целях ясности, не показаны на фиг. 1.
Контроллер 190 также предназначен для приема электронных сигналов через проводные или беспроводные средства передачи (также не показанные на фиг. 1) от различных датчиков в составе устройства 100, где каждый датчик служит для измерения рабочей характеристики или параметра. Одним подобным датчиком является датчик давления в кольцевом пространстве технической колонны 159, описанный выше. Устройство 100 может включать скважинный датчик давления в кольцевом пространстве 170a, подсоединенный или иным образом связанный с ОНБК 170. Скважинный датчик давления в кольцевом пространстве 170a может служить для измерения значения или диапазона давления в кольцевом пространстве между внешней поверхностью ОНБК 170 и внутренним диаметром ствола скважины 160, который может также упоминаться как межтрубное давление, забойное межтрубное давление, ИПБ межтрубное давление или давление в кольцевом пространстве скважины. Указанные измерения могут включать статическое давление в кольцевом пространстве (насосы выключены) и активное кольцевое давление (насосы включены).
Следует отметить, что значение слова "детектирование", в контексте настоящего описания, может включать обнаружение, определение, измерение, вычисление и/или получение данных каким-либо иным путем. Аналогично, значение слова "детектировать", в контексте настоящего описания, может включить обнаруживать, определять, измерять, вычислять и/или получать данные каким-либо иным путем.
Устройство 100 может дополнительно или альтернативно включать датчик удара/вибрации 170b, который предназначен для обнаружения удара и/или вибрации в ОНБК 170. Устройство 100 может дополнительно или альтернативно включать датчик перепада давления (ΔP) в забойном двигателе 172a, который предназначен для измерения значения или диапазона перепада давления в одном или нескольких двигателях 172 ОНБК 170. Один или несколько двигателей 172 могут являться или включать гидравлический буровой двигатель, также известный как турбонасосный забойный двигатель, который использует гидравлическую энергию бурового раствора для вращения долота 175. Один или несколько датчиков крутящего момента 172b также могут быть включены в ОНБК 170, чтобы передавать контроллеру 190 данные, которые характеризуют крутящий момент, приложенный к долоту 175 одним или несколькими двигателями 172.
Устройство 100 может дополнительно или альтернативно включать торцевой датчик долота 170c, предназначенный для определения текущей ориентации торца долота. Торцевой датчик долота 170c может являться или включать стандартный или перспективный магнитный датчик торца долота, который определяет ориентацию переднего торца долота относительно магнитного севера или географического севера. В альтернативе, или дополнительно, датчик торца долота 170c может являться, или включать в себя стандартный или перспективный гравитационный датчик торца долота, который определяет ориентацию торца долота относительно гравитационного поля Земли. Датчик торца долота 170c может дополнительно, или альтернативно, являться, или включать в себя стандартный или перспективный гиродатчик. Устройство 100 может дополнительно или альтернативно включать датчик 170d нагрузки на долото, входящий в состав ОНБК 170 и предназначенный для определения нагрузки на долото в, или вблизи, ОНБК 170.
Устройство 100 может дополнительно или альтернативно включать датчик крутящего момента 140a, подсоединенный или иным путем связанный с верхним приводом 140. Датчик крутящего момента 140a альтернативно может быть расположен в или связан с ОНБК 170. Датчик крутящего момента 140a может служить для определения значения или диапазона кручения вала 145 и/или бурильной колонны 155 (например, в ответ на рабочие силы, действующие на бурильную колонну). Верхний привод 140 может дополнительно или альтернативно включать, или может быть иным способом связан с датчиком скорости 140b, который предназначен для измерения значения или диапазона скорости вращения вала 145.
Верхний привод 140, буровая лебедка 130, кронблок или перемещаемый блок, буровой трос или крепление неподвижного конца могут дополнительно или альтернативно включать, или могут быть иным способом связаны с датчиком 140c нагрузки на долото (нагрузку на долото вычисляют на основе показаний датчика нагрузки на крюк, которые могут быть основаны на динамической и статической нагрузке на крюк) (например, один или несколько датчиков устанавливают где-либо на механизмах, расположенных на траектории действия нагрузки, для измерения и вычисления нагрузки на долото, которая может изменяться в зависимости от конкретной буровой установки), отличным от датчика 170d нагрузки на долото. Датчик 140c нагрузки на долото может служить для измерения значения или диапазона нагрузки на долото, где такое измерение может быть выполнено в верхнем приводе 140, буровой лебедке 130 или другом элементе устройства 100.
Измерение, выполняемое датчиками, описанными в настоящей заявке, может выполняться однократно, непрерывно, периодически и/или через произвольные интервалы времени. Измерение может быть вручную запущено оператором или другим лицом, имеющим доступ к операторскому интерфейсу, или запущено автоматически, например, путем синхронизации характеристики или параметра, удовлетворяющих заданному условию (например, истечение промежутка времени, достижение заданной глубины в процессе бурения, износ бурового долота, достигающий заданного уровня и т.д.). Такие датчики и/или другие средства обнаружения могут включать один или несколько интерфейсов, которые могут быть расположены на буровой площадке или в другом, удаленном положении с подключением к системе по сети.
На фиг. 2A показана блок-схема способа 200a направления ориентации торца долота в требуемое положение согласно одному или более аспектам настоящего описания. Способ 200a может быть выполнен во взаимодействии с одним или несколькими элементами устройства 100, показанного на фиг. 1, в процессе работы устройства 100. Например, способ 200a может быть выполнен с целью регулирования ориентации торца долота в процессе операций бурения, выполняемых с помощью устройства 100.
Способ 200a включает операцию 210, в ходе которого определяется текущая ориентация торца долота TFM. TFM может быть определено с использованием стандартного или перспективного магнитного датчика торца долота, который определяет ориентацию торца долота относительно магнитного севера или географического севера. В альтернативе, или дополнительно, TFM может быть определено с использованием стандартного или перспективного гравитационного датчика торца долота, который определяет ориентацию торца долота относительно гравитационного поля Земли. В примере осуществления TFM может быть определено с использованием магнитного датчика торца долота, когда конец ствола скважины менее чем на приблизительно 7° отклонен от вертикали, а затем определено с использованием гравитационного датчика торца долота, когда конец ствола скважины более чем на приблизительно 7° отклонен от вертикали. Впрочем, гиродатчики и/или другие устройства для определения TFM также включены в объем настоящего описания.
В следующей операции 220 TFM сравнивают с требуемой ориентацией торца долота TFD. Если TFM в достаточной мере равен TFD, как определено в ходе операции решения 230, способ 200a итерируют, а операцию 210 повторяют. "В достаточной мере равен" может означать по существу равный, например, отличающийся не более чем на несколько процентов или, альтернативно, может означать отличающийся не более чем на заданный угол, например приблизительно на 5°. Кроме того, итерация способа 200a может являться по существу мгновенной, или перед итерацией способа 200a может быть период задержки, после которого повторяют операцию 210.
Если TFM не в достаточной мере равен TFD, как определено в ходе операции решения 230, способ 200a продолжают до операции 240, в ходе которого вал вращается приводной системой, например, на величину приблизительно равную различию между TFM и TFD. Однако другие величины вращательного регулирования, выполненного в ходе операции 240, также включены в объем настоящего описания. После выполнения операции 240 способ 200a итерируют, а операцию 210 повторяют. Такое повторение может быть по существу мгновенным или перед повтором способа 200a может быть период задержки, после которого повторяют операцию 210.
На фиг. 2B показана блок-схема другого варианта осуществления способа 200a, показанного на фиг. 2A, обозначенного в настоящем описании номером 200b. Способ 200b включает операцию сбора информации, когда ориентация торца долота находится в требуемой ориентации, и может быть выполнен во взаимодействии с одним или несколькими элементами устройства 100, показанного на фиг. 1, в процессе работы устройства 100. Например, способ 200b может быть выполнен для регулирования ориентации торца долота в процессе операций бурения, выполняемых с помощью устройства 100.
Способ 200b включает операции 210, 220, 230, 240, описанные выше для способа 200a и показанные на фиг. 2A. Однако способ 200b также включает операцию 233, в ходе которой определяют текущие рабочие параметры, если TFM в достаточной мере равен TFD, как определено в ходе операции решения 230. В альтернативе, или дополнительно, текущие рабочие параметры могут быть определены в периодических или заданных промежутках времени, или после возникновения других событий. Способ 200b также включает операцию 236, в ходе которой регистрируют рабочие параметры, измеренные в операции 233. Рабочие параметры, зарегистрированные в ходе операции 236, могут использоваться в будущих вычислениях величины вращения вала, выполняемых в ходе операции 240, при этом они могут быть определены одним или несколькими программируемыми адаптивными контроллерами, программируемыми логическими контроллерами, искусственными нейронными сетями и/или другими адаптивными и/или "обучающимися" контроллерами или обрабатывающим устройством.
Каждая операция способов 200a и 200b может быть выполнена автоматически. Например, контроллер 190 на фиг. 1 может служить для автоматизированного выполнения сравнения торца долота операции 230, либо периодически, с произвольными интервалами, либо иным путем. Контроллер 190 может также служить для автоматизированной генерации и передачи сигналов управления, направляющих вращение вала в операции 240, как например, в ответ на сравнение торца долота, выполняемое в ходе операций 220 и 230.
На фиг. 3 показана блок-схема устройства 300 согласно одному или более аспектам настоящего описания. Устройство 300 включает пользовательский интерфейс 305, ОНБК 310, приводную систему 315, буровую лебедку 320 и контроллер 325. Устройство 300 может функционировать в окружающей среде и/или в установке, показанной на фиг. 1. Например, ОНБК 310 может являться по существу аналогичным ОНБК 170, показанному на фиг. 1, приводная система 315 может являться по существу аналогичной верхнему приводу 140, показанному на фиг. 1, буровая лебедка 320 может являться по существу аналогичной буровой лебедке 130, показанной на фиг. 1, и/или контроллер 325 может являться по существу аналогичным контроллеру 190, показанному на фиг. 1. Устройство 300 может также применяться при осуществлении способа 200a, показанного на фиг. 2A, и/или способа 200b, показанного на фиг. 2B, среди прочих способов, описанных в настоящей заявке или включенных в рамки настоящего описания.
Пользовательский интерфейс 305 и контроллер 325 могут представлять собой отдельные элементы, которые связаны посредством проводных или беспроводных средств. В альтернативе пользовательский интерфейс 305 и контроллер 325 могут являться составляющими элементами одной системы или контроллера 327, как указано пунктирными линиями на фиг. 3.
Пользовательский интерфейс 305 включает приспособление 330 для ввода пользователем одной или более контрольных точек торца долота, и может также включать приспособление для ввода пользователем других контрольных точек, пределов и других входных данных. Приспособление 330 для ввода данных может включать клавиатуру, устройство идентификации речи, диск, кнопку, выключатель, ползунковый селектор, переключатель, джойстик, мышку, базу данных и/или другое стандартное или перспективное устройство ввода. Такие приспособления для ввода данных могут поддержать ввод данных из локальных и/или удаленных местоположений. В альтернативе, или дополнительно, приспособление 330 для ввода данных может включать приспособление для выбора пользователем заданных значений или диапазонов контрольных точек торца долота, например, посредством одного или нескольких выпадающих меню. Данные контрольных точек торца долота могут быть дополнительно или альтернативно выбраны контроллером 325 посредством выполнения одной или более процедур поиска в базе данных. Обычно приспособление 330 для ввода данных и/или другие элементы в рамках настоящего описания поддерживают работу и/или мониторинг от станций на буровой площадке, а также из одного или нескольких удаленных местоположений, посредством линии связи с системой, сети, локальной сети, глобальной сети, Интернета, спутниковой связи и/или радио, среди прочих средств.
Пользовательский интерфейс 305 может также включать дисплей 335 для вывода пользователю информации в текстовой, графической или видео форме. Дисплей 335 может также использоваться пользователем для ввода данных контрольных точек торца долота в соединении с приспособлением для ввода данных 330. Например, приспособление для ввода данных контрольных точек торца долота 330 может являться составной частью дисплея 335 или может быть подсоединено к нему.
ОНБК 310 может включать ИПБ датчик 340 давления в кольцевом пространстве, который предназначен для детектирования значения или диапазона давления в кольцевом пространстве, в или вблизи ИПБ части ОНБК 310, при этом он может быть по существу аналогичен датчику давления 170a, показанному на фиг. 1. Данные давления в кольцевом пространстве, полученные с помощью ИПБ датчика давления в кольцевом пространстве 340, могут отсылаться посредством электронного сигнала в контроллер 325 с помощью проводной или беспроводной передачи.
ОНБК 310 может также включать ИПБ датчик 345 удара/вибрации, который предназначен для детектирования удара и/или вибрации в ИПБ части ОНБК 310, при этом он может быть по существу аналогичен датчику удара/вибрации 170b, показанному на фиг. 1. Данные удара/вибрации, полученные с помощью ИПБ датчика удара/вибрации 345, могут отсылаться посредством электронного сигнала в контроллер 325 с помощью проводной или беспроводной передачи.
ОНБК 310 может также включать датчик перепада давления гидравлического забойного двигателя 350, который предназначен для детектирования значения или диапазона перепада давления в забойном двигателе ОНБК 310, при этом он может быть по существу аналогичен датчику 172a перепада давления забойного двигателя, показанному на фиг. 1. Данные перепада давления, полученные с помощью датчика перепада давления гидравлического забойного двигателя 350, можно отослать посредством электронного сигнала в контроллер 325 с помощью проводной или беспроводной передачи. Перепад давления гидравлического забойного двигателя может быть альтернативно или дополнительно вычислен, детектирован или определен иным путем на поверхности, например, посредством вычисления разности между поверхностным давлением в стояке, не доходя до забоя, и давлением при контакте долота с забоем при начале бурения и действии крутящего момента.
ОНБК 310 может также включать магнитный датчик торца долота 355 и гравитационный датчик торца долота 360, которые вместе служат для определения текущего положения торца долота и которые вместе могут быть по существу аналогичны датчику торца долота 170c, показанному на фиг. 1. Магнитный датчик торца долота 355 может представлять собой или включать обычный или перспективный магнитный датчик торца долота, который определяет ориентацию торца долота относительно магнитного севера или географического севера. Гравитационный датчик торца долота 360 может представлять собой или включать стандартный или перспективный гравитационный датчик торца долота, который определяет ориентацию торца долота относительно гравитационного поля Земли. В примере осуществления магнитный датчик торца долота 355 может определять текущее положение торца долота, когда конец ствола скважины отклонен от вертикали менее чем на приблизительно 7°, а гравитационный датчик торца долота 360 может определять текущее положение торца долота, когда конец ствола скважины отклонен от вертикали более чем на приблизительно 7°. Впрочем, в рамках настоящего описания могут также применяться другие датчики торца долота, включая немагнитные датчики торца долота и негравитационные датчики наклона. В любом случае, ориентацию торца долота, определенную с помощью одного или нескольких датчиков торца долота (например, датчиков 355 и/или 360), можно отправить посредством электронного сигнала в контроллер 325 с помощью проводной или беспроводной передачи.
ОНБК 310 может также включать ИПБ датчик 365 крутящего момента, который предназначен для детектирования значения или диапазона значений крутящего момента, приложенного к биту двигателем (двигателями) ОНБК 310, при этом он может быть по существу аналогичен датчику крутящего момента 172b, показанному на фиг. 1. Данные крутящего момента, полученные с помощью ИПБ датчика крутящего момента 365, можно отослать посредством электронного сигнала в контроллер 325 с помощью проводной или беспроводной передачи.
ОНБК 310 может также включать ИПБ датчик 370 нагрузки на долото, который предназначен для детектирования значения или диапазона значений нагрузки на долото в, или вблизи, ОНБК 310, при этом он может быть по существу аналогичен датчику 170d нагрузки на долото, показанному на фиг. 1. Данные нагрузки на долото, полученные с помощью датчика 370 нагрузки на долото, можно отослать посредством электронного сигнала в контроллер 325 с помощью проводной или беспроводной передачи.
Буровая лебедка 320 включает контроллер 390 и/или другое устройство для управления разматыванием и/или сматыванием бурового троса (такого как буровой трос 125, показанный на фиг. 1). Такое управление может включать управление вращением буровой лебедки (в или из) для регулировки высоты или положения крюка, и может также включать регулирование скорости, с которой крюк поднимается или опускается. Впрочем, примеры осуществления в рамках настоящего описания включают также такие, в которых система подачи бурильной колонны в скважину с помощью буровой лебедки может альтернативно представлять собой гидравлический подъемник или реечно-шестеренчатый подъемник подъемной системы буровой установки, в которых движение бурильной колонны вверх и вниз осуществляется с помощью механизма, отличного от буровой лебедки. Бурильная колонна может также иметь форму гибкой трубы, при этом движение бурильной колонны в и из скважины управляется устьевой головкой, которая захватывает и проталкивает/поднимает непрерывную колонну в/из скважины. Тем не менее, такие варианты осуществления могут также включать вариант контроллера 390, причем контроллер 390 может также служить для управления подачей и/или подъемом бурильной колонны.
Приводная система 315 включает поверхностный датчик 375 крутящего момента, который предназначен для детектирования значения или диапазона реактивного кручения полого вала или бурильной колонны, почти так же, как датчик 140a крутящего момента, показанный на фиг. 1. Приводная система 315 также включает датчик положения полого вала 380, который предназначен для определения значения или диапазона углового положения полого вала, например, относительно географического севера или другой неподвижной точки. Данные поверхностного кручения и положения вала, полученные с помощью датчиков 375 и 380, соответственно, можно отослать посредством электронного сигнала в контроллер 325 с помощью проводной или беспроводной передачи. Приводная система 315 также включает контроллер 385 и/или другое устройство для управления угловым положением, скоростью и направлением вала или другого элемента бурильной колонны, присоединенного к приводной системе 315 (например, вала 145, показанного на фиг. 1).
В примере осуществления приводная система 315, контроллер 385 и/или другой элемент устройства 300 может включать устройство для определения трения между бурильной колонной и стволом скважины. Например, такое устройство для определения трения может служить для детектирования возникновения и/или интенсивности трения, которое затем может быть вычтено из фактического "реактивного" крутящего момента, возможно контроллером 385 и/или другим контрольным элементом устройства 300.
Контроллер 325 предназначен для приема одного или нескольких вышеописанных параметров от пользовательского интерфейса 305, ОНБК 310 и/или приводной системы 315, а также использования таких параметров для непрерывного, периодического или иного определения текущей ориентации торца долота. Контроллер 325 может также служить для генерации сигнала управления, например, посредством программируемого адаптивного контроля, и подачи сигнала управления приводной системе 315 и/или буровой лебедке 320 для регулирования и/или поддерживания ориентации торца долота. Например, контроллер 325 может выполнять способ 202, показанный на фиг. 2B, подавая один или несколько сигналов приводной системе 315 и/или буровой лебедке 320 для увеличения или уменьшения нагрузки на долото, и/или положение вала, что может требоваться для точного "регулирования" процесса бурения.
Кроме того, как и в примере осуществления, изображенном на фиг. 3, контроллер 385 приводной системы 315 и/или контроллер 390 буровой лебедки 320 могут служить для генерации и передачи сигнала контроллеру 325. Следовательно, контроллер 385 приводной системы 315 может быть предназначен для влияния на управление ОНБК 310 и/или буровой лебедки 320, чтобы способствовать достижению и/или сохранению нужной ориентации торца долота. Аналогично, контроллер 390 буровой лебедки 320 может быть предназначен для влияния на управление ОНБК 310 и/или приводной системой 315, чтобы способствовать достижению и/или сохранению нужной ориентации торца долота. В альтернативе, или дополнительно, контроллер 385 приводной системы 315 и контроллер 390 буровой лебедки 320 могут обмениваться данными напрямую, как обозначено двойной стрелкой 392, показанной на фиг. 3. Таким образом, контроллер 385 приводной системы 315 и контроллер 390 буровой лебедки 320 могут взаимодействовать при достижении и/или сохранении нужной ориентации торца долота. Такое взаимодействие может не зависеть от контроля, осуществляемого в отношении или посредством контроллера 325 и/или ОНБК 310.
На фиг. 4A показано схематическое изображение, по меньшей мере, части устройства 400a согласно одному или более аспектам настоящего описания. Устройство 400a является примером исполнения устройства 100, показанного на фиг. 1, и/или устройства 300, показанного на фиг. 3, и служит примером среды, в которой может быть осуществлен способ 200a, показанный на фиг. 2A, и/или способ 200b, показанный на фиг. 2B. Устройство 400a включает группу вводов 410 пользователя и, по меньшей мере, один главный модуль 420 управления, который может включать один или несколько процессоров. Вводы 410 пользователя включают положительный предел 410a крутящего момента вала, отрицательный предел 410b крутящего момента вала, положительный предел 410c скорости вала, отрицательный предел 410d скорости вала, положительный предел 410e колебания вала, отрицательный предел 410f колебания вала, ввод 410g нейтральной точки колебания вала и ввод 410h ориентации торца долота. Некоторые варианты осуществления включают ввод данных из предыдущих замеров 410p инклинометрии, заданную траекторию 410q бурения или предпочтительно и то, и другое. Указанные вводимые данные могут использоваться для получения ввода 410h ориентации торца долота, необходимого для удерживания ОНБК на заданной траектории бурения. Впрочем, в других вариантах осуществления ориентацию торца долота вводят напрямую. В других вариантах осуществления в объеме настоящего описания могут использоваться дополнительные или альтернативные вводы 410 пользователя. Ввод 410 пользователя может быть по существу аналогичен вводу 330 пользователя или другим элементам пользовательского интерфейса 305, показанным на фиг. 3. По меньшей мере, один модуль 420 управления может формировать, по меньшей мере, часть, или сам может быть сформирован, по меньшей мере, частью контроллера 325, показанного на фиг. 3, и/или контроллера 385 приводной системы 315, показанного на фиг. 3. В примере осуществления, показанном на фиг. 4A, по меньшей мере, один модуль 420 управления включает контроллера 420a торца долота и контроллер 420b буровой лебедки. В некоторых вариантах осуществления он также включает контроллер бурового насоса.
Устройство 400a также включает или иным способом объединено с группой датчиков 430. Группа датчиков 430 включает датчик 430a крутящего момента долота, датчик 430b крутящего момента вала, датчик 430c скорости вала, датчик 430d положения вала, датчик перепада давления гидравлического забойного двигателя 430e и датчик 430f ориентации торца долота. В других вариантах осуществления в рамках настоящего описания, впрочем, могут использоваться дополнительные или альтернативные датчики 430. В примере осуществления каждая группа датчиков 430 может располагаться на поверхности ствола скважины и не располагаться в скважине вблизи долота, оборудования низа бурильной колонны и/или любых приборов "для измерения в процессе бурения". В других вариантах осуществления, впрочем, один или несколько датчиков 430 могут не являться поверхностными датчиками. Например, в примере осуществления датчик 430b крутящего момента вала, датчик 430c скорости вала и датчик 430d положения вала могут являться поверхностными датчиками, тогда как датчик 430a крутящего момента долота, датчик перепада давления гидравлического забойного двигателя 430e и датчик 430f ориентации торца долота могут являться скважинными датчиками (например, ИПБ датчиками). Кроме того, некоторые из датчиков 430 могут быть по существу аналогичны соответствующим датчикам, показанным на фиг. 1 или фиг. 3.
Устройство 400a также включает или соединено с приводом 440 вала. Привод 440 вала может формировать, по меньшей мере, часть верхнего привода или другой приводной системы вращения, такой как верхний привод 140, показанный на фиг. 1, и/или приводная система 315, показанная на фиг. 3. Привод 440 вала служит для получения сигнала управления приводом вала, по меньшей мере, от одного модуля 420 управления, или же от других элементов устройства 400a. Сигнал управления приводом вала задает положение (например, азимут), направление вращения, скорость вращения и/или колебание вала. Контроллер торца долота 420a предназначен для генерации сигнала управления приводом вала с использованием данных, полученных от ввода 410 пользователя и датчиков 430.
Контроллер 420a торца долота может сравнивать фактический крутящий момент вала с положительным пределом кручения вала, полученным из соответствующего ввода 410a пользователя. Фактический крутящий момент вала может быть определен с использованием данных, полученных от датчика 430b крутящего момента вала. Например, если фактический крутящий момент вала превышает положительный предел крутящего момента вала, то сигнал управления приводом вала может указать, чтобы привод 440 вала уменьшил крутящий момент, приложенный к валу. В примере осуществления контроллер 420a торца долота может служить для оптимизации параметров процесса бурения, связанных с фактическим крутящим моментом вала, например, максимально повышая фактический крутящий момент вала, не превышая при этом положительный предел кручения вала.
Контроллер 420a торца долота, альтернативно или дополнительно, может сравнивать фактический крутящий момент вала с отрицательным пределом кручения вала, полученным от соответствующего ввода 410b пользователя. Например, если фактический крутящий момент вала меньше, чем отрицательный предел крутящего момента вала, то сигнал управления приводом вала может указать, чтобы привод 440 вала увеличил крутящий момент, приложенный к валу. В примере осуществления контроллер 420a торца долота может служить для оптимизации параметров процесса бурения, связанных с фактическим крутящим моментом вала, например, максимально снижая фактический крутящий момент вала, но не превышая при этом отрицательного предела кручения вала.
Контроллер 420a торца долота, альтернативно или дополнительно, может сравнивать фактическую скорость вала с положительным пределом скорости вала, полученным из соответствующего ввода 410c пользователя. Фактическая скорость вала может быть определена с использованием данных, полученных от датчика 430c скорости вала. Например, если фактическая скорость вала превышает положительный предел скорости вала, то сигнал управления приводом вала может указать, чтобы привод 440 вала снизил скорость вращения вала. В примере осуществления контроллер 420a торца долота может служить для оптимизации параметров процесса бурения, связанных с фактической скоростью вала, например, максимально повышая фактическую скорость вала, не превышая при этом положительный предел скорости вала.
Контроллер 420a торца долота, альтернативно или дополнительно, может сравнивать фактическую скорость вала с отрицательным пределом скорости вала, полученным из соответствующего ввода 410d пользователя. Например, если фактическая скорость вала меньше, чем отрицательный предел скорости вала, то сигнал управления приводом вала может указать, чтобы привод 440 вала повысил скорость вращения вала. В примере осуществления контроллер 420a торца долота может служить для оптимизации параметров процесса бурения, связанных с фактической скоростью вала, например, максимально снижая фактическую скорость вала, не превышая при этом отрицательный предел скорости вала.
Контроллер 420a торца долота, альтернативно или дополнительно, может сравнивать фактическую ориентацию (азимут) вала с положительным пределом колебания вала, полученным из соответствующего ввода 410e пользователя. Фактическая ориентация вала может быть определена с использованием данных, полученных от датчика 430d положения вала. Например, если фактическая ориентация вала превышает положительный предел колебания вала, то сигнал управления приводом вала может указать, чтобы привод 440 вала вращал вал до положительного предела колебания вала, или изменял параметры колебания вала таким образом, что фактическое колебание вала в положительном направлении (например, по часовой стрелке) не превышало положительный предел колебания вала. В примере осуществления контроллер 420a торца долота может служить для оптимизации параметров процесса бурения, связанных с фактическим колебанием вала, например, максимально повышая величину фактического колебания вала в положительном направлении, не превышая при этом положительный предел колебания вала.
Контроллер 420a торца долота, альтернативно или дополнительно, может сравнивать фактическую ориентацию вала с отрицательным пределом колебания вала, полученным из соответствующего ввода 410f пользователя. Например, если фактическая ориентация вала меньше, чем отрицательный предел колебания вала, то сигнал управления приводом вала может указать, чтобы привод 440 вала вращал вал до отрицательного предела колебания вала, или изменял параметры колебания вала таким образом, что фактическое колебание вала в отрицательном направлении (например, против часовой стрелки) не превышает отрицательный предел колебания вала. В примере осуществления контроллер 420a торца долота может служить для оптимизации параметров процесса бурения, связанных с фактическим колебанием вала, например, максимально повышая фактическую величину колебания вала в отрицательном направлении, не превышая при этом отрицательного предела колебания вала.
Контроллер 420a торца долота, альтернативно или дополнительно, может сравнивать фактическую нейтральную точку колебания вала с вводом желаемой нейтральной точки колебания вала, полученного из соответствующего ввода 410g пользователя. Фактическая нейтральная точка колебания вала может быть определена с использованием данных, полученных от датчика 430d положения вала. Например, если нейтральная точка фактического колебания вала отличается от желаемой нейтральной точки колебания вала на заданную величину или выходит за пределы желаемого диапазона нейтральной точки колебания, то сигнал управления приводом вала может указать, чтобы привод 440 вала изменил параметры колебания вала, чтобы сделать соответствующее исправление.
Контроллер 420a торца долота, альтернативно или дополнительно, может сравнивать фактическую ориентацию торца долота с вводом ориентации торца долота, полученным из соответствующего ввода 410h пользователя. Ввод ориентации торца долота, полученный из ввода 410h пользователя, может представлять собой отдельное значение, характеризующее желаемую ориентацию торца долота. Он может быть введен непосредственно или получен из файлов данных инклинометрии 410p и заданной траектории 410q бурения с использованием, например, способа, описанного на фиг. 4C, 5A и 5B. Если фактическая ориентация торца долота отличается от значения ввода ориентации торца долота на заданную величину, то сигнал управления приводом вала может указать, чтобы привод 440 вала вращал вал на уровне, соответствующем необходимому исправлению ориентации торца долота. Однако ввод ориентации торца долота, полученный из ввода 410h пользователя, может альтернативно являться диапазоном, в пределах которого желательно остается ориентация торца долота. Например, если фактическая ориентация торца долота выходит за пределы диапазона ввода ориентации торца долота, то сигнал управления приводом вала может указать, чтобы привод 440 вала вращал вал на уровне, необходимом для восстановления фактической ориентации торца долота в пределах диапазона ввода ориентации торца долота. В примере осуществления фактическая ориентация торца долота сравнивается с вводом ориентации торца долота, который непосредственно введен или получен из файлов данных инклинометрии 410p и заданной траектории 410q бурения с использованием автоматизированного процесса. В некоторых вариантах осуществления это основано на заданном и/или постоянно обновляемом плане бурения (например, "проекте скважины"), по возможности с учетом ошибки продвижения по траектории бурения.
В каждом из вышеуказанных сравнений и/или вычислений, выполняемых контроллером торца долота, фактический перепад давления гидравлического забойного двигателя и/или фактический крутящий момент долота может также использоваться при генерации сигнала привода вала. Фактический перепад давления гидравлического забойного двигателя может быть определен с использованием данных, полученных от датчика перепада давления 430e гидравлического забойного двигателя и/или путем измерения давления насоса перед тем, как долото приходит в контакт с плоскостью забоя и резко изменяет данное значение, а фактический крутящий момент долота может быть определен с использованием данных, полученных от датчика крутящего момента долота 430a. В альтернативе фактический крутящий момент долота может быть вычислен с использованием данных, полученных от датчика перепада давления гидравлического забойного двигателя 430e, поскольку фактический крутящий момент долота и фактический перепад давления гидравлического забойного двигателя пропорциональны.
Одним из примеров, в котором может использоваться фактический перепад давления гидравлического забойного двигателя и/или фактический крутящий момент долота, является тот, когда нельзя исходить из фактической ориентации торца долота при получении точных или достаточно быстрых данных. Например, такой случай может иметь место в процессе "слепого" бурения (при полном поглощении бурового раствора) или других случаев, в которых бурильщик не получает данных от датчика 430f ориентации торца долота. В таких случаях фактический крутящий момент долота и/или фактический перепад давления гидравлического забойного двигателя могут использоваться для определения фактической ориентации торца долота. Например, если все другие параметры бурения остаются неизменными, изменение фактического крутящего момента долота и/или фактического перепада давления гидравлического забойного двигателя может указывать пропорциональное вращение ориентации торца долота в том же или в противоположном направлении бурения. Например, увеличение крутящего момента или перепада давления может указывать, что торец долота изменяется в противоположном направлении бурения, тогда как уменьшение крутящего момента или перепада давления может указывать, что торец долота перемещается в направлении бурения. Таким образом, данные, полученные от датчика 430a крутящего момента долота и/или датчика перепада давления 430e гидравлического забойного двигателя, могут использоваться контроллером 420 торца долота при генерации сигнала привода вала, в результате чего вал может вращаться таким образом, что исправляется или иным путем учитывается какое-либо изменение положения торца долота, которое характеризуется изменением фактического крутящего момента долота и/или при фактическом перепаде давления гидравлического забойного двигателя.
Кроме того, при некоторых режимах работы данные, полученные контроллером 420 торца долота от датчика 430f ориентации торца долота, могут запаздывать от фактической ориентации торца долота. Например, датчик 430f ориентации торца долота может определять фактическое положение торца долота лишь периодически, или для передачи данных от торца долота до поверхности может требоваться значительный период времени. Фактически, в системах предшествующего уровня техники подобная задержка часто может составлять 30 секунд или более. Следовательно, в некоторых исполнениях в рамках настоящего описания может быть более точным или каким-либо иным образом выгодным, чтобы контроллер 420a торца долота использовал фактический крутящий момент и данные давления, полученные от датчика крутящего момента долота 430a и датчика 430e перепада давления гидравлического забойного двигателя, в дополнение, если не в альтернативе, к использованию данных фактического положения торца долота, полученных от датчика 430f ориентации торца долота. Впрочем, в некоторых вариантах осуществления настоящего описания могут применяться инклинометрические измерения в реальном времени, как раскрыто на фиг. 9A и 9B, для получения данных относительно направления ОНБК и ориентации торца долота.
Как показано на фиг. 4A, вводы 410 пользователя устройства 400a могут также включать номинальную нагрузку на долото 410i, номинальный перепад давления гидравлического забойного двигателя 410j, ввод 410k скорости проходки, ввод 410l нагрузки на долото, ввод 410m перепада давления гидравлического забойного двигателя и предельную нагрузку 410n на крюк, а также, по меньшей мере, один модуль 420 управления может также включать контроллер 420b буровой лебедки. Группа датчиков 430 устройства 400a может также включать датчик 430g нагрузки на крюк, датчик 430h давления бурового насоса, датчик 430i глубины долота, датчик 430j давления в кольцевом пространстве и датчик 410k скорости проходки. Каждая группа датчиков 430 может быть расположена на поверхности ствола скважины, в скважине (например, ИПБ) или в другом месте.
Как описано выше, контроллер 420a торца долота предназначен для генерации сигнала управления приводом вала с использованием данных, полученных из вводов 410 пользователя и от датчиков 430, с последующей подачей сигнала управления приводом вала к приводу 440 вала, управляя, таким образом, ориентацией торца долота путем регулирования ориентации и скорости вала. Таким образом, сигнал управления приводом вала служит для управления (по меньшей мере, частичного) ориентацией вала (например, азимутом), а также скоростью и направлением вращения вала (при наличии).
Контроллер 420b буровой лебедки предназначен для генерации сигнала управления приводом барабана буровой лебедки (или тормоза) также с использованием данных, полученных из ввода 410 пользователя и от датчиков 430. После этого контроллер 420b буровой лебедки подает сигнал управления приводом буровой лебедки к приводу 450 буровой лебедки, управляя, таким образом, направлением подачи и скоростью буровой лебедки. Привод 450 буровой лебедки может формировать, по меньшей мере, часть или может быть сформирован, по меньшей мере, частью буровой лебедки 130, показанной на фиг. 1, и/или буровой лебедки 320, показанной на фиг. 3. Объем настоящего описания также может быть применен или легко адаптирован к другим приспособлениям для регулировки вертикального положения бурильной колонны. Например, контроллер 420b буровой лебедки может являться контроллером подъема, а привод 450 буровой лебедки может представлять собой или включать приспособление для подъема бурильной колонны, отличное от или дополнительное к буровой лебедке (например, реечно-шестеренчатое подъемное устройство).
Устройство 400a также включает устройство 420c сравнения, которое сравнивает текущие данные нагрузки на крюк с номинальной нагрузкой на долото, получая текущую нагрузку на долото. Текущие данные нагрузки на крюк получают от датчика 430g нагрузки на крюк, а номинальную нагрузку на долото получают из соответствующего ввода пользователя 410i.
Контроллер буровой лебедки 420b сравнивает текущую нагрузку на долото с введенными данными нагрузки на долото. Текущую нагрузку на долото получают от устройства 420c сравнения, а введенные данные нагрузки на долото получают из соответствующего ввода 410i пользователя. Введенные данные нагрузки на долото, полученные из ввода 410i пользователя, могут являться отдельным значением, характеризующим требуемую нагрузку на долото. Например, если фактическая нагрузка на долото отличается от нагрузки на долото, введенной с заданной величиной, то сигнал управления приводом буровой лебедки может указать, чтобы привод 450 буровой лебедки подавал или сматывал трос на длину, соответствующую необходимому исправлению нагрузки на долото. Впрочем, введенные данные нагрузки на долото, полученные из ввода 410i пользователя, могут альтернативно являться диапазоном, в пределах которого желательно остается нагрузка на долото. Например, если фактическая нагрузка на долото выходит за пределы диапазона ввода нагрузки на долото, то сигнал управления приводом буровой лебедки может указать, чтобы привод 450 буровой лебедки подавал или сматывал трос на длину, необходимую для восстановления фактической нагрузки на долото в пределах диапазона ввода нагрузки на долото. В примере осуществления контроллер 420b буровой лебедки может служить для оптимизации параметров процесса бурения, связанных с нагрузкой на долото, например, максимально повышая фактическую нагрузку на долото, не превышая при этом значение или диапазон ввода нагрузки на долото.
Устройство 400a также включает устройство 420d сравнения, которое сравнивает данные давления бурового насоса с номинальным перепадом давления гидравлического забойного двигателя, получая "нескорректированное" значение перепада давления гидравлического забойного двигателя. Данные по давлению бурового насоса получают от датчика давления бурового насоса 430h, а номинальный перепад давления гидравлического забойного двигателя получают из соответствующего ввода 410j пользователя.
Устройство 400a также включает устройство 420e сравнения, которое использует нескорректированный перепад давления гидравлического забойного двигателя вместе с данными глубины долота и данными давления в кольцевом пространстве, с получением "скорректированного" или текущего перепада давления гидравлического забойного двигателя. Данные глубины долота получают от датчика 430i глубины долота, а данные давления в кольцевом пространстве получают от датчика 430j давления в кольцевом пространстве. Датчик 430j давления в кольцевом пространстве может являться поверхностным датчиком давления в кольцевом пространстве, таким как датчик 159, показанный на фиг. 1, и/или скважинным датчиком давления в кольцевом пространстве, таким как датчик 170a, показанный на фиг. 1, при этом и в том, и в другом случае он может измерять давление в кольцевом пространстве между обсадной колонной или диаметром ствола скважины и элементом бурильной колонны.
Контроллер 420b буровой лебедки сравнивает текущее значение перепада давления гидравлического забойного двигателя с введенными данными перепада давления гидравлического забойного двигателя. Текущий перепад давления гидравлического забойного двигателя получают от устройства 420e сравнения, а введенные данные перепада давления гидравлического забойного двигателя получают из соответствующего ввода 410m пользователя. Введенные данные перепада давления гидравлического забойного двигателя, полученные из ввода 410m пользователя, могут являться отдельным значением, характеризующим требуемое значение перепада давления гидравлического забойного двигателя. Например, если текущее значение перепада давления гидравлического забойного двигателя отличается от введенного перепада давления гидравлического забойного двигателя на заданную величину, то сигнал управления приводом буровой лебедки может указать, чтобы привод 450 буровой лебедки подавал или сматывал трос на длину, соответствующую необходимому исправлению перепада давления гидравлического забойного двигателя. Впрочем, введенные данные перепада давления гидравлического забойного двигателя, полученные из ввода 410m пользователя, могут альтернативно являться диапазоном, в пределах которого желательно сохраняется перепад давления гидравлического забойного двигателя. Например, если текущее значение перепада давления гидравлического забойного двигателя выходит за пределы данного диапазона, то сигнал управления приводом буровой лебедки может указать, чтобы привод 450 буровой лебедки подавал или сматывал трос на длину, необходимую для восстановления текущего значения перепада давления гидравлического забойного двигателя в пределах введенного диапазона. В примере осуществления контроллер 420b буровой лебедки может служить для оптимизации параметров процесса бурения, связанных с перепадом давления гидравлического забойного двигателя, например, максимально повышая перепад давления гидравлического забойного двигателя, не превышая при этом введенное значение или диапазон.
Контроллер 420b буровой лебедки, дополнительно или альтернативно, может сравнивать фактические данные скорости проходки с введенными данными скорости проходки. Фактические данные скорости проходки получают от датчика 430k скорости проходки, а введенные данные скорости проходки получают из соответствующего ввода 410k пользователя. Введенные данные скорости проходки, полученные из ввода 410k пользователя, могут являться отдельным значением, характеризующим требуемую скорость проходки. Например, если фактическая скорость проходки отличается от введенной скорости проходки на заданную величину, то сигнал управления приводом буровой лебедки может указать, чтобы привод 450 буровой лебедки подавал или сматывал трос на длину, соответствующую необходимому исправлению скорости проходки. Впрочем, введенные данные скорости проходки, полученные из ввода 410k пользователя, альтернативно могут являться диапазоном, в пределах которого желательно остается скорость проходки. Например, если фактическая скорость проходки выходит за пределы введенного диапазона скорости проходки, то сигнал управления приводом буровой лебедки может указать, чтобы привод 450 буровой лебедки подавал или сматывал трос на длину, необходимую для восстановления фактической скорости проходки в пределах введенного диапазона скорости проходки. В примере осуществления контроллер 420b буровой лебедки может служить для оптимизации параметров процесса бурения, связанных со скоростью проходки, например, максимально повышая фактическую скорость проходки, не превышая при этом введенное значение или диапазон скорости проходки.
Контроллер 420b буровой лебедки может также использовать данные, полученные от контроллера 420a торца долота, генерируя сигнал управления приводом буровой лебедки. Изменения в фактической нагрузке на долото могут вызвать изменения в фактическом крутящем моменте долота, фактическом перепаде давления гидравлического забойного двигателя и фактической ориентации торца долота. Например, по мере роста нагрузки, приложенной к долоту, фактическая ориентация торца долота может вращаться в направлении, противоположном направлению вращения долота (из-за реактивного крутящего момента), при этом фактический крутящий момент долота и давление гидравлического забойного двигателя могут пропорционально вырасти. Следовательно, контроллер 420a торца долота может направить контроллеру 420b буровой лебедки данные, указывающие, требуется ли подавать трос буровой лебедки или сматывать, и возможно соответствующую скорость подачи, необходимую для приведения фактической ориентации торца долота в соответствие с введенным значением или диапазоном ориентации торца долота, обеспечиваемым соответствующим вводом 410h пользователя. В примере осуществления контроллер 420b буровой лебедки может также подавать данные контроллеру 420a торца долота, чтобы вращать вал по часовой стрелке или против часовой стрелки на величину и/или со скоростью, достаточными, чтобы компенсировать увеличенную или уменьшенную нагрузку на долото, глубину долота или давление в кольцевом пространстве.
Как показано на фиг. 4A, ввод 410 пользователя может также включать ввод 410n предела натяжения. При генерации сигнала управления приводом буровой лебедки контроллер 420b буровой лебедки может обеспечивать, что буровая лебедка не натянет трос с превышением предела натяжения, полученного из ввода 410n пользователя. Предел натяжения также известен как предельная нагрузка на крюк и, среди прочих параметров, может зависеть от конкретной конфигурации буровой установки.
В примере осуществления контроллер 420b буровой лебедки может также направлять данные контроллеру 420a торца долота, чтобы контроллер 420a торца долота вращал вал, например, на величину, в направлении и/или со скоростью, достаточными, чтобы компенсировать достижение или превышение предела натяжения. Контроллер 420a торца долота может также направлять данные контроллеру 420b буровой лебедки, чтобы контроллер 420b буровой лебедки увеличивал или уменьшал нагрузку на долото, или регулировал подачу бурильной колонны, например, на величину, в направлении и/или со скоростью, достаточными, чтобы надлежащим образом регулировать ориентацию торца долота.
Далее на фиг. 4B показано обобщенное схематическое изображение, по меньшей мере, части другого варианта осуществления устройства 400b. Как и устройство 400a, устройство 400b является примером исполнения устройства 100, показанного на фиг. 1, и/или устройства 300, показанного на фиг. 3, и служит примером среды, в которой может быть осуществлен способ 200a, показанный на фиг. 2A, и/или способ 200b, показанный на фиг. 2B.
Как и устройство 400a, устройство 400b включает группу вводов 410 пользователя и, по меньшей мере, один модуль 420 управления. По меньшей мере, один модуль управления 420 включает контроллер 420a торца долота и контроллер 420b буровой лебедки, описанные выше, а также контроллер 420c бурового насоса. Устройство 400b также включает или иным способом связано с группой датчиков 430, приводом 440 вала и приводом 450 буровой лебедки, как и устройство 400a. Устройство 400b также включает или иным способом связано с приводом 460 бурового насоса, который предназначен для управления работой бурового насоса, такого как буровой насос 180, показанный на фиг. 1. В примере осуществления устройства 400b, показанного на фиг. 4B, каждая группа датчиков 430 может быть расположена на поверхности ствола скважины, в скважине (например, ИПБ) или в другом месте.
Контроллер 420c бурового насоса предназначен для генерации сигнала управления приводом бурового насоса с использованием данных, полученных от вводов пользователя 410 и датчиков 430. После этого контроллер 420c бурового насоса подает сигнал управления приводом бурового насоса приводу 460 бурового насоса, регулируя, таким образом, скорость, расход и/или давление бурового насоса. Контроллер 420c бурового насоса может формировать, по меньшей мере, часть или может быть сформирован, по меньшей мере, частью контроллера 190, показанного на фиг. 1, и/или контроллера 325, показанного на фиг. 3.
Как описано выше, перепад давления гидравлического забойного двигателя может быть пропорционально или иным образом связано с ориентацией торца долота, нагрузкой на долото и/или крутящим моментом долота. Следовательно, контроллер 420c бурового насоса может использоваться для воздействия на фактический перепад давления гидравлического забойного двигателя, способствуя приведению фактической ориентации торца долота в соответствие с введенным значением или диапазоном ориентации торца долота, которое обеспечивается соответствующим вводом пользователя. Такая работа контроллера 420c бурового насоса может являться независимой от работы контроллера 420a торца долота и контроллера 420b буровой лебедки. В альтернативе, как обозначено двойными стрелками 462, показанными на фиг. 4B, работа контроллера 420c бурового насоса по обеспечению или поддерживанию требуемой ориентации торца долота может выполняться совместно или во взаимодействии с контроллером 420a торца долота и контроллером 420b буровой лебедки.
Контроллеры 420a, 420b и 420c, показанные на фиг. 4A и 4B, могут являться или включать программируемые или независимые от модели адаптивные контроллеры, такие как поставляемые фирмами CyberSoft, General Cybernation Group. Контроллеры 420a, 420b и 420c также, все вместе или независимо, могут применяться на любом стандартном или перспективном вычислительном устройстве, таком как один или более персональных компьютеров или серверов, переносных устройств, ПЛК систем и/или универсальных ЭВМ, среди прочих.
Фиг. 4C является другой обобщенной блок-схемой, идентифицирующей примерные элементы другой альтернативной системы 400c управления бурением (размещаемой на буровой площадке) устройства 100, показанной на фиг. 1. В данном примере осуществления блок-схема включает главный контроллер 402, включающий вычислительную машину 404 торца долота, модуль 420 управления, включающий контроллер 420a торца долота, контроллер 420b буровой лебедки и контроллер 420f бурового насоса. Кроме того, система управления включает устройство 470 ввода пользователя, которое может принимать вводы 410, показанные на фиг. 4A, дисплей 472 вывода, а также датчики 430, соединенные с главным контроллером 402. В показанном варианте осуществления вычислительная 404 машина торца долота и модуль управления 420 представляют собой приборы, которые могут совместно использовать один и тот же процессор или работать с использованием отдельных процессоров, выполняя различные, но совместные функции. Соответственно, показан главный 402 контроллер, который включает в себя контроллеры буровой лебедки, торца долота и бурового насоса, а также вычислительную машину 404 торца долота. Впрочем, в других вариантах осуществления вычислительная машина 404 торца долота работает с использованием отдельного процессора для его вычислений и определений траектории. Устройство 470 входа пользователя и дисплей 472 могут включать, по меньшей мере, часть пользовательского интерфейса, такого как пользовательский интерфейс 305, показанный на фиг. 3. Пользовательский интерфейс и контроллер могут являться отдельными элементами, которые связаны с помощью проводных или беспроводных средств. Впрочем, альтернативно они могут, например, являться составными элементами отдельной системы.
Как указано выше, план бурения включает профиль ствола скважины или заданную траекторию бурения. План бурения представляет собой предварительно выбранную траекторию пробуриваемого ствола скважины, обычно до того как условия не потребуют внесения в план бурения изменений. Обычно он определяет ключевые точки изгиба ствола скважины и оптимальные степени изгиба, которые используются для достижения позиционной цели или целей ствола скважины, называемых целевыми местоположениями. По мере возможности главный контроллер 402 управляет буровой установкой, направляя ОНБК в целевое местоположение по заданной траектории бурения в пределах указанной зоны допуска.
Вычислительная машина 404 представляет собой контроллер или часть контроллера, предназначенные для вычисления контрольной траектории бурения для ОНБК. Указанная траектория придерживается заданной траектории бурения ствола скважины в пределах допустимой погрешности, известной как зона допуска (также называемая в настоящем описании как "цилиндр допуска" в качестве примера). На основе позиционных и других откликов, а также на основе исходной, заданной траектории бурения, вычислительная машина 404 торца долота либо задает рекомендуемые угловые настройки торца долота в пределах 0-360 градусов и дистанцию бурения в футах или метрах при данной настройке параметров торца долота, либо дает рекомендацию продолжать бурение в режиме роторного бурения. Предпочтительно, угловые настройки по возможности минимально отличаются от пробуренной секции в целях минимизации резких изгибов, которые могут усложнять установку обсадной трубы. Данные рекомендации обеспечивают движение ОНБК в нужном направлении с эффективным достижением целевого местоположения.
Вычислительная машина 404 торца долота вводит рекомендации на основе ряда факторов. Например, вычислительная машина 404 торца долота рассматривает исходную контрольную траекторию бурения, оценивает направляющие ориентировки и оценивает прогнозируемую глубину долота в реальном времени. В некоторых вариантах осуществления указанная машина 404 оценивает дополнительную информацию, которая помогает идентифицировать местоположение и направление ОНБК. В других вариантах машина 404 оценивает только направляющие ориентировки и исходную траекторию бурения.
Исходная контрольная траектория бурения может быть непосредственно введена пользователем или может быть вычислена вычислительной машиной 404 торца долота на основе параметров, введенных пользователем. Направляющие ориентировки могут быть определены на основе предыдущих или существующих координатных данных из результатов периодических или оперативных геофизических исследований для теоретического определения положения долота. Это может включать, например, параметры изгиба или интенсивность отклонения ствола скважины, получаемые через определенные пользователем интервалы бурения на заданную глубину. Указанные параметры могут использоваться в качестве исходных точек для следующей пробуриваемой контрольной кривой и могут быть получены из анализа текущего характера бурения с учетом предыдущих параметров бурения. Вычисление расстояния по прямой до заданного целевого местоположения можно выполнить на основе прогнозируемой позиции долота в реальном времени. Указанная прогнозируемая позиция долота в реальном времени может быть вычислена вычислительной машиной 404 торца долота или модулем 420 управления на основе статических и/или динамических данных, полученных от датчиков 430. Если значения вычислены модулем 420 управления, они могут направляться вычислительной машине 404 торца долота для дополнительной обработки. Указанные значения прогнозируемой глубины долота могут быть вычислены с использованием любого числа методов, включающих, например, метод минимальной дуги, метода направляющих ориентировок и линейного метода. После вычисления положения оно используется в качестве исходной точки для вычисления нормального зазора и любой последующей контрольной траектории или для вычисления уточненной траектории.
Используя указанные вводы, вычислительная машина 404 торца долота определяет, где фактическая траектория бурения совпадает с заданной или контрольной траекторией бурения. На основе полученных данных вычислительная машина 404 торца долота создает команды управления, способствующие удерживанию фактической траектории бурения на заданной траектории бурения, то есть в пределах зоны допуска. Указанные команды могут быть выведены как команды ориентации торца долота, которые могут использоваться во вводе 410h на фиг. 4A. В некоторых вариантах осуществления созданные команды управления основаны на степени отклонения фактической траектории бурения относительно заданной траектории бурения, как дополнительно описано ниже. Примерный способ 500, осуществляемый вычислительной машиной торца долота 404 для определения уровня отклонения от желаемой траектории и для определения уточненной траектории, показан на фиг. 5A.
На фиг. 5A способ 500 может начинаться с операции 502, в которой вычислительная машина 404 торца долота принимает введенную пользователем контрольную или заданную траекторию бурения. Контрольная или заданная траектория бурения представляет собой желаемую траекторию, которая может быть основана на ряде факторов, но обычно является наиболее эффективной траекторией, ведущей от буровой установки до целевого местоположения.
В операции 504 вычислительная машина 404 торца долота оценивает текущую желаемую траекторию бурения, направляющие ориентировки и прогнозируемую глубину долота. Как описано выше, направляющие ориентировки основаны на предыдущих замерах инклинометрии и прогнозируемых значениях глубины долота, или позицию долота определяет вычислительная машина 404 торца долота, модуль 420 управления, или другой контроллер или модуль в главном контроллере 402. Полученные данные передаются от вычислительного элемента вычислительной машине 404 торца долота и включают значение интенсивности отклонения ствола скважины, которое используется для вычисления корректирующих кривых в случае необходимости, как описано ниже. В данном случае, в качестве первой итерации текущая желаемая траектория бурения может соответствовать контрольной или заданной траектории бурения, определенной в плане бурения, принятом в операции 502.
В операции 506 вычислительная машина 404 торца долота определяет фактическую траекторию бурения на основе направляющих ориентировок и прогнозируемой глубины долота. Как указано выше, дополнительные данные могут использоваться для определения фактической траектории бурения, а в некоторых вариантах осуществления направляющие ориентировки могут использоваться для оценки фактической траектории бурения, если определение фактической траектории бурения сомнительно или необходимый сенсорный ввод для вычисления ограничен. В операции 508 вычислительная машина 404 торца долота определяет, находится ли фактическая траектория в пределах зоны допуска, определенной текущей желаемой траекторией бурения. Зона допуска или зона продолжения бурения показана и описана на фиг. 5B.
На фиг. 5B показан пример заданной траектории 530 бурения ствола скважины, обозначенной пунктирной линией. Заданная траектория 530 ствола скважины формирует ось предполагаемого цилиндра 532 допуска, пороговой зоны 534 и зоны 536 коррекции. До тех пор пока фактическая траектория бурения находится в пределах цилиндра 532 допуска, фактическая траектория бурения находится в пределах приемлемого диапазона отклонения от заданной траектории бурения, и бурение можно продолжать без регулировки управления. Цилиндр допуска может быть определен в пределах определенных процентных долей расстояния от желаемой траектории или от диаметра скважины, и может частично зависеть от факторов, которые отличаются для каждой предлагаемой скважины. Например, альтернативно зона коррекции может быть установлена на уровне приблизительно 50% отклонения или приблизительно 20% отклонения от заданной траектории, тогда как пороговая зона может быть установлена приблизительно на уровне 25% или приблизительно 10% отклонения от заданной траектории. Таким образом, возвращаясь к фиг. 5A, если вычислительная машина 404 торца долота решает, что фактическая траектория находится в пределах зоны допуска вокруг заданной траектории бурения в операции 508, то тогда процесс может просто возвращаться к операции 504, ожидая подтверждения следующей направляющей ориентировки и/или прогнозируемой глубины долота.
Если в операции 508 вычислительная машина 404 торца долота решает, что фактическая траектория бурения выходит за пределы цилиндра 532 допуска, показанного на фиг. 5B, то тогда вычислительная машина 404 торца долота определяет, находится ли фактическая траектория в пределах пороговой зоны 534, при этом модуль 420 управления может генерировать один или более сигналов управления, которые обеспечивают удерживание ОНБК в желаемом направлении. Пороговая зона 534 на фиг. 5B концентрически расположена вокруг цилиндра 532 допуска. Она включает внутреннюю границу, определяемую цилиндром 532 допуска, и внешнюю границу, определяемую зоной 536 коррекции. Если фактическая траектория бурения находилась в пороговой зоне 534, то фактическую траекторию бурения можно оценить как умеренно отклонившуюся от заданной траектории 530 бурения. В данном варианте осуществления зона 536 коррекции концентрически расположена вокруг пороговой зоны 534 и определяет всю область за переделами пороговой зоны 534. Если фактическая траектория бурения находилась в зоне 536 коррекции, то фактическую траекторию бурения можно оценить как значительно отклонившуюся от заданной траектории бурения 530.
Далее, возвращаясь к фиг. 5A, если фактическая траектория бурения находится в пределах пороговой зоны 534 в операции 510, то вычислительная машина 404 торца долота может вычислять трехмерную криволинейную секционную траекторию из прогнозируемой позиции долота в направлении заданной траектории 530 бурения в операции 512. Как указано выше, данное вычисление может быть основано на данных, полученных из текущих или предыдущих файлов инклинометрии, и может включить прогноз глубины долота или позиции долота и значения интенсивности отклонения ствола скважины. Расчетная криволинейная траектория предпочтительно включает ориентацию торца долота, требуемую для движения по криволинейной секции, и измеренную глубину бурения в футах или метрах, требуемую, например, для возвращения ОНБК в зону допуска с максимально возможной эффективностью, но с минимизацией какой-либо избыточной коррекции.
Указанная скорректированная направляющая траектория, в качестве одного или нескольких сигналов управления, подается в модуль 420 управления в операции 514. Таким образом, один или несколько контроллеров 420a, b, f на фиг. 4C принимают данные по желаемой ориентации торца долота и другую рекомендательную информацию, которые позволяют контроллеру генерировать один или более сигналов управления, которые направляют ОНБК. От заданной траектории бурения модуль 420 управления и/или другие элементы системы 400c управления бурением, расположенные на буровой площадке, могут управлять буровой лебедкой, верхним приводом и буровым насосом, регулируя направление ОНБК согласно скорректированной траектории.
Отсюда процесс возвращается к операции 504, в которой вычислительная машина 404 торца долота оценивает текущую заданную траекторию, направляющие ориентировки и прогнозируемую глубину долота. В данном случае текущая заданная траектория изменяется с помощью криволинейной секции траектории, вычисленной в операции 512. Соответственно в ходе следующей итерации траектория бурения, оцениваемая как "заданная" траектория бурения, становится корректируемой траекторией.
Если в операции 510 фактическая траектория бурения не находилась в пределах пороговой зоны 534, то тогда вычислительная машина 404 торца долота определяет, что фактическая траектория бурения должна находиться в зоне 536 коррекции, и определяет, является ли заданная траектория критической траекторией бурения в операции 516. Критическая траектория бурения обычно является траекторией, в случае которой существуют факторы, которые ограничивают целесообразность создания новой заданной траектории бурения к целевому местоположению. Например, критическая траектория бурения может являться траекторией, выбранной с целью обхода подземных пластов горной породы, при этом области за пределами пороговой зоны 534 включают пласт горной породы. Конечно, определение заданной траектории бурения как критической траектории может быть сделано по любой причине.
Если заданная траектория бурения не определена как критическая траектория в операции 516, то вычислительная машина 404 торца долота генерирует новую заданную траекторию на основе прогнозируемого текущего местоположения долота относительно целевого местоположения. Указанная новая заданная траектория может являться независимой, или даже может не пересекаться с исходной планируемой траекторией, и может быть выработана на основе, например, наиболее эффективной траектории к целевому местоположению из текущего. Например, новая траектория может включать минимальную величину изгиба, требуемую от прогнозируемого текущего местоположения долота до целевого. Новая заданная траектория может указывать измеренную глубину, наклон, азимут, север-юг и восток-запад, торец долота и интенсивность отклонения ствола скважины или изгиб через равные расстояния между точками наблюдений, например приблизительно через 100 футов или 30 метров. Траектория, данные ориентации торца долота, а также другие данные могут быть направлены в модуль управления 420, при этом модуль управления 420 может регулировать ОНБК, чтобы следовать по новой траектории с максимально возможной точностью. Указанные выводимые данные могут включать расчетный рекомендуемый угол торца долота и оставшееся расстояние бурения. Процесс снова возвращается к операции 504, в которой вычислительная машина 404 торца долота оценивает текущую заданную траекторию, направляющие ориентировки и прогнозируемую глубину долота. Теперь текущая заданная траектория потока является новой заданной траекторией, вычисленной в операции 518.
Если заданная траектория определена как критическая траектория в операции 516, то тогда вычислительная машина 404 торца долота создает траекторию, следуя по которой долото пересекается с исходной заданной траекторией при непрерывном бурении. Для этого, как указано в операции 520, вычислительная машина 404 торца долота вычисляет, по меньшей мере, первую трехмерную криволинейную секционную траекторию ("перекрестную траекторию") от прогнозируемой позиции долота до заданной траектории бурения или до цели. Необязательно вычислительная машина 404 торца долота может дополнительно вычислять вторую трехмерную криволинейную секционную траекторию, чтобы объединять ОНБК на заданной траектории из перекрестной траектории перед достижением цели. Указанные криволинейные секционные траектории могут быть разделены на удерживаемую или прямую секцию в зависимости от того, насколько далеко отклонился ОНБК в зону коррекции. Конечно, если траектория пересечения будет задана без второй трехмерной криволинейной секционной траектории, то уточненный план будет удерживаемой, или прямой секцией, от отклонения до новой цели, конечной цели или местоположения на исходной заданной траектории.
Вычислительная машина 404 торца долота подает уточненную направляющую траекторию, включающую только что сгенерированную кривую (кривые) в форме одного или более сигналов управления, модулю 420 управления в операции 514. Как указано выше, уточненная заданная траектория может включать измеренную глубину, наклон, азимут, север-юг и восток-запад, торец долота и интенсивность отклонения ствола скважины через равные расстояния между точками наблюдений, например, приблизительно через 100 футов или 30 метров. В ходе следующей итерации вычислительная машина 404 торца долота оценивает текущую заданную траекторию, направляющие ориентировки и прогнозируемую глубину долота, причем текущая заданная траектория является скорректированной заданной траекторией в операции 504.
Способ 500 повторно выполняют в ходе процесса бурения с целью сохранения фактической траектории бурения на заданной траектории и изменения заданной траектории в зависимости от обстоятельств. В некоторых вариантах осуществления процесс идет непрерывно в реальном времени. Это может успешно обеспечить ускоренное бурение без необходимости в остановках, чтобы технолог сверялся с планом бурения или оценивал данные инклинометрии. В других вариантах осуществления процесс повторяют после заданного периода или интервала бурения, такого как, например, приблизительно 90 секунд, приблизительно пять минут, приблизительно десять минут, приблизительно тридцать минут или какой-либо другой продолжительности. В альтернативе итерация может выполняться при проходке до заданной глубины бурения. Например, процесс может быть повторен, когда существующий ствол скважины удлиняется приблизительно на пять футов (≈1,5 м), приблизительно на десять футов (≈3 м), приблизительно на пятьдесят футов (≈15 м) или на какую-либо другую глубину. Интервал процесса может также включать и временную, и глубинную составляющие. Например, процесс может включить бурение в течение, по меньшей мере, приблизительно тридцати минут или до тех пор, пока ствол скважины не удлинится приблизительно на десять футов. В другом примере интервал может включать бурение до тех пор, пока ствол скважины не удлинится приблизительно на двадцать футов, но не дольше чем приблизительно девяносто минут. Конечно, вышеуказанные значения времени и глубины для интервала являются всего лишь примерами, и многие другие значения также включены в объем настоящего описания.
После вычисления вычислительной машиной 404 торца долота, обычно с помощью электроники, скорректированная траектория для исходного плана бурения и скорректированная траектория до целевого местоположения передаются элементам управления системы управления буровой площадки. После вычисления коррекции вычислительная машина 404 торца долота или другой элемент управления буровой площадки, включающий модуль управления 420, вводит рекомендации торца долота или команды, которые могут быть выполнены на буровой установке.
В некоторых вариантах осуществления пользователь может выборочно контролировать, создает ли вычислительная машина 404 торца долота новую заданную траекторию до цели или же создает скорректированную заданную траекторию к исходному плану, когда фактическая траектория бурения находится в зоне 536 коррекции. Например, пользователь может выбрать функцию по умолчанию, которая делает указание опции корректировки вычислить траекторию до "цели" или "исходного плана". В некоторых вариантах осуществления установка по умолчанию может быть активна в течение только определенных частей исходной траектории бурения.
Поскольку решения по управлению траекторией основаны на величине отклонения буровой скважины от заданной траектории, после каждого инклинометрического измерения может быть выполнено нормальное плановое бесконтактное сканирование заданной скважины. Если положение бурения находится в пороговой зоне, то обычно рекомендуется сдвиг буровой скважины назад к плану. Если скважина продолжает отклоняться от плана и входит в зону коррекции, то обычно в качестве коррекции вычисляется измененная заданная траектория до цели или выполняется коррекция исходного плана.
В некоторых вариантах осуществления оценивают одну или более переменных в дополнение или вместо оперативного прогнозирования глубины долота или направляющих ориентировок. Вводимые переменные могут варьироваться в каждом вычислении. Кроме того, интенсивность отклонения ствола скважины или кривизна могут использоваться для вычисления подходящей кривой, которая ограничивает величину колебания и предотвращает выход за пределы траектории бурения. Интенсивность отклонения ствола скважины или кривизна могут быть получены посредством анализа с использованием текущих параметров бурения ОНБК на основе предыдущих параметров бурения или их комбинации.
При создании измененного плана бурения, который возвращает ОНБК на исходную траекторию бурового долота, когда, например, прогнозируемое положение долота находится в пределах пороговой зоны 534 или когда заданная траектория бурения значительно отклонилась и является критической траекторией, задача состоит в том, чтобы возвратиться на исходную, заданную траекторию бурения до достижения целевого местоположения. Профиль кривой, тем не менее, все еще рассматривается, поскольку профиль кривой может влиять на трение, колебание и другие факторы. Значение интенсивности отклонения ствола скважины может использоваться для вычисления одного или обоих вычислений кривой, как и раньше, при этом первая кривая поворачивает долото по исходной заданной траектории или к цели, а необязательная вторая кривая позволяет ОНБК более быстро выровняться и следовать по заданной траектории с ограниченной величиной, или без выхода за пределы или избыточной коррекции. Один из способов определения профиля кривой включает вычисление профиля "кривая-прямая" или "кривая-прямая-кривая" до конечной точки или целевого местоположения в исходном плане, а затем выполнение повторного вычисления в конечной точке "цель-минус-1", период измерения инклинометрии или вычисление расстояния, или другой период. Вычисление предпочтительно выполняют с помощью электроники. Оно продолжается, доходя до точки цель-минус-2 и так далее, пока вычисление не прекращается. Последнее успешное вычисление профиля может служить для получения одной или двух дуг, имеющих наименьшую допустимую кривизну с соответствующей протяженностью бурения. Указанные значения определяют рекомендуемую информацию торца долота для первой кривой коррекции, которая используется для выработки новой траектории бурения и для направления ОНБК. Когда фактическая траектория бурения достигает конечной кривой, пересекающей исходный план бурения, в дополнительном варианте осуществления, в котором используется вторая, конечная кривая, возвращаемая к исходному плану бурения, то указанную конечную кривую бурят со второй расчетной длиной бурения и степенью кривизны.
Следует отметить, что хотя цилиндр 532 допуска и пороговая зона 534 показаны в виде цилиндров без круглого поперечного сечения, они могут иметь другую форму, включая, помимо прочего, овальную, коническую, параболическую или другую, например, или могут не являться концентрическими вокруг заданной траектории 530 бурения. Альтернативные формы могут, например, позволять долоту отклоняться от заданной траектории в одном направлении больше, чем в другом, в зависимости, например, от геологических залежей на одной стороне заданной траектории. Кроме того, хотя описанный пример включает три зоны (зону допуска, пороговую зону и зону коррекции), это необходимо всего лишь для пояснения. В другие варианты осуществления могут быть включены дополнительные зоны, и могут оцениваться дополнительные факторы при решении, следует ли создавать траекторию, которая пересекает исходную заданную траекторию, следует ли создавать траекторию, которая идет непосредственно к целевому местоположению, не пересекая исходную заданную траекторию бурения, или насколько DLS может быть щадящей на корректирующей кривой (кривых).
В некоторых примерах осуществления бурильщик может увеличить или уменьшить размер допуска в процессе бурения, вводя данные в вычислительную машину 404 торца долота. Это может способствовать минимизации или предотвращению избыточной корректировки или избыточного колебания в траектории бурения.
После вычисления вывод данных от вычислительной машины 404 торца долота может выступать в качестве вводимых данных для модуля 420 управления на фиг. 4C, или модуля 420 управления на фиг. 4A. Например, вывод данных от вычислительной машины торца долота 404 может включать, среди прочего, ориентацию торца долота, пригодную в качестве ввода 410h на фиг. 4A. На данной фигуре ориентация торца долота служит вводом в устройство 400a и используется контроллером 420a торца долота для управления приводом 440 вала. Дополнительный вывод данных от вычислительной машины 404 торца долота может использоваться в качестве вводов в устройство 400a. С помощью указанных вводов контроллер торца долота 420a, контроллер 420b буровой лебедки и контроллер 420f бурового насоса могут управлять буровой установкой или ОНБК непосредственно, направляя ОНБК по желаемой траектории бурения.
В некоторых вариантах осуществления может использоваться модуль оповещения для предупреждения бурильщиков и/или станции контрольного наблюдения скважин об отклонении долота от заданной траектории бурения, о какой-либо потенциальной проблеме с системой бурения или для сообщения другой информации, требующей внимания. Когда бурильщики не присутствуют на буровой установке, то есть бурильщик(и) находится на удалении от буровой установки, модуль оповещения может быть связан с вычислительной машиной 404 торца долота таким образом, что когда вычислительная машина 404 торца долота обнаруживает отклонение долота от заданной траектории бурения, модуль оповещения предупреждает бурильщика и, в некоторых случаях, может ожидать ручного вмешательства пользователя, например, подтверждения, перед направлением долота по новой траектории. Указанное предупреждение может осуществляться на буровой установке с помощью любых подходящих средств и может отображаться на дисплее 472 в форме визуального сигнала тревоги. В альтернативе, предупреждение может представлять собой звуковой сигнал тревоги или может вызывать передачу сигнала тревоги посредством радиосигнала, направляемого в определенные местоположения или конкретным лицам.
В дополнение к передаче сигнала тревоги на дисплей 472 или в другое местоположение около буровой установки, аварийный модуль может передавать сигнал тревоги на прилегающие объекты (вне буровой площадки). Это может позволить проводить внешний контроль и может позволить бурильщику выполнять удаленное регулирование. Указанные сигналы тревоги могут передаваться с помощью любой подходящей линии связи. Например, в некоторых вариантах осуществления, когда модуль оповещения подает аварийный сигнал в удаленное местоположение, сигнал тревоги может идти через систему спутниковой связи. Более конкретно, один или несколько орбитальных (обычно в фиксированном положении) спутников могут использоваться для передачи сигналов связи (потенциально двунаправленных) между станцией контрольного наблюдения скважины и модулем оповещения на морской буровой платформе. В альтернативе для связи между модулем оповещения и бурильщиками или станцией контрольного наблюдения скважин могут использоваться радио, сотовые, оптические или стационарные проводные системы передачи сигнала. В ситуациях, когда местоположением нефтяной скважины является морская платформа, может использоваться система спутниковой связи, поскольку такие системы связи как сотовая, проводная и корабль-берег в некоторых ситуациях являются непрактичными или ненадежными. Необходимо отметить, что внешний контроль и регулирование могут быть выполнены без конкретных сигналов тревоги, но с использованием описанных систем удаленного доступа.
Станция централизованного контрольного наблюдения скважин в большинстве случаев может являться компьютером или сервером, который соединен с множеством модулей оповещения, каждый из которых помещен на различных буровых платформах. Станция контрольного наблюдения скважин может получать различные типы сигналов (например, спутниковые, радио, сотовые, проводные, оптические, корабль-берег и телефонные) с нескольких буровых площадок, на которых установлен модуль оповещения. Станция контрольного наблюдения скважин может также передавать избирательную информацию с модуля оповещения на определенный удаленный пользовательский терминал группы удаленных пользовательских терминалов, связанных с модулем оповещения. Станция контрольного наблюдения скважин может также получать информацию или команды от удаленного пользовательского терминала. Удаленный пользовательский терминал, через станцию контрольного наблюдения скважин и модуль оповещения, отображает параметры бурения или добычи на скважине, связанной с модулем оповещения.
Станция контрольного наблюдения скважин в большинстве случаев может размещаться в центральном терминале данных и может быть связана с модулем оповещения на буровой площадке, например, через линию спутниковой связи. Станция контрольного наблюдения может позволять пользователям определять тревоги на основе информации и данных, собранных на буровой площадке (площадках) с помощью различных методов репликации и синхронизации. По этой причине полученные данные могут по существу не являться оперативными в каждом варианте осуществления изобретения, поскольку сигналы тревоги зависят от данных, которые были переданы от буровой площадки в центральный терминал данных по радио или спутниковой связи (что по определению отнимает некоторое время).
В одном варианте осуществления примерный модуль оповещения контролирует один, два или более определенных процессов или параметров. Рабочая секция и фактические значения, на которые установлен сигнал тревоги, также обычно происходит из базы данных и метаданных, и поэтому, когда параметр относится к конкретному типу данных, соответствующие операции могут быть выбраны пользователем.
На фиг. 6A показана блок-схема способа 600a согласно одному или более аспектам настоящего описания. Способ 600a может быть выполнен во взаимодействии с одним или более элементами устройства 100, показанного на фиг. 1, в процессе работы устройства 100. Например, способ 600a может быть выполнен с целью оптимизации эффективности бурения в процессе операций бурения, выполняемых посредством устройства 100, может быть выполнен любой из систем управления, раскрытых на любой из фигур в настоящей заявке, включая, среди прочих, фиг. 3 и 4A-C.
Способ 600a включает операцию 602, в ходе которой детектируют, собирают или иным путем получают параметры для вычисления удельной механической энергии. Указанные параметры могут быть упомянуты в настоящей заявке как параметры удельной механической энергии и могут использоваться в качестве ввода в фиг. 4A-C и других. Параметры удельной механической энергии включают статические и динамические параметры. Таким образом, некоторые указанные параметры изменяются по существу непрерывно. Указанные динамические параметры удельной механической энергии включают нагрузку на долото, частоту вращения бурового долота, крутящий момент бурильной колонны и скорость проходки бурового долота через пласт. Другие параметры удельной механической энергии изменяются редко, например после подъема бурильной колонны, достижения породы нового типа и изменения типа долота, среди прочих событий. Указанные статические параметры удельной механической энергии включают механический кпд и диаметр бурового долота.
Параметры удельной механической энергии могут быть по существу или полностью получены автоматически, с небольшой потребностью во вводе пользователя, или без него. Например, в ходе первой итерации, в процессе выполнения операций способа 600a, статические параметры удельной механической энергии могут быть получены посредством автоматического запроса из базы данных. Таким образом, в ходе последующих итераций статические параметры удельной механической энергии могут не потребовать повторного получения, например, если тип бурового долота или характеристики пласта не изменились после предыдущего повтора способа 600a. Поэтому выполнение операции 602 во многих итерациях может потребовать определения лишь динамических параметров удельной механической энергии. Определение динамических параметров удельной механической энергии может быть выполнено посредством или при ином взаимодействии с различными датчиками, такими как датчики, показанные на фиг. 1, 3, 4A и/или 4B.
Последующая операция 604 в способе 600a включает вычисление удельной механической энергии. В примере осуществления удельную механическую энергию вычисляют согласно следующей формуле:
MSE = MEP×[(4×WOB)/(π×DIA2)+(480×RPM×TOR)/(ROP×DIA2)],
в которой:
MSE = удельная механическая энергия (фунты на квадратный дюйм);
МЕР = механический кпд (отношение);
WOB = нагрузка на долото (фунты);
ДИАМЕТР = диаметр бурового долота (дюймы);
RPM = частота вращения долота (об/мин);
TOR = крутящий момент бурильной колонны (футо-фунты); и
ROP = скорость проходки (футы в час).
МЕР может быть также назван как коэффициент полезного действия бурового долота. В примере осуществления МЕР равен 0,35. Впрочем, МЕР может изменяться в зависимости от одного или более различных факторов, таких как, например, тип долота, тип пласта и/или другие факторы.
Способ 600a также включает операцию 606 решения, в ходе которой значение удельной механической энергии, вычисленное в ходе предыдущей операции 604, сравнивается с идеальной удельной механической энергией. Идеальная удельная механическая энергия, используемая для сравнения в операции 606 решения, может являться отдельным значением, таким как 100%. В альтернативе идеальная удельная механическая энергия, используемая для сравнения в операции 606 решения, может являться целевым диапазоном значений, таким как 90-100%. В альтернативе идеальная удельная механическая энергия может являться диапазоном значений, полученных из усовершенствованного анализа области, которую предстоит бурить, учитывающего различные пласты, пробуриваемые в текущей операции.
Если в ходе операции 606 определено, что удельная механическая энергия, вычисленная в операции 604, равна идеальной удельной механической энергии или находится в пределах идеального диапазона удельной механической энергии, способ 600a может быть повторен с повторным выполнением операции 602. Однако если в операции 606 определено, что расчетная удельная механическая энергия не равна идеальной удельной механической энергии или не находится в пределах идеального диапазона удельной механической энергии, то выполняют дополнительную операцию 608. В ходе операции 608 один или более рабочих параметров регулируют с целью приближения удельной механической энергии к идеальному значению удельной механической энергии или значению в пределах идеального диапазона удельной механической энергии. Например, одновременно обращаясь к фиг. 1 и 6A, выполнение операции 608 может включать увеличение или уменьшение нагрузки на долото, частоту вращения бурового долота и/или крутящий момент бурильной колонны, передачу сигнала управления от контроллера 190 верхнему приводу 140 и/или буровой лебедке 130, с целью изменения частоты вращения бурового долота, крутящего момента бурильной колонны и/или нагрузки на долото. После выполнения операции 608, способ 600a может быть повторен с повтором операции 602.
Каждая из операций способа 600a может быть выполнена автоматизированно. Например, автоматизированное определение динамических параметров удельной механической энергии и поиск в базе данных статических параметров удельной механической энергии уже было описано выше применительно к операции 602. Контроллер 190 на фиг. 1 (а также другие, описанные в настоящей заявке) может служить для автоматического выполнения вычисления удельной механической энергии в операции 604, и могут также служить для автоматизированного выполнения сравнения удельной механической энергии в операции решения 606, в которой и вычисление, и сравнение удельной механической энергии могут выполняться периодически, через случайные интервалы, или иным образом. Контроллер может также служить для автоматической генерации и передачи сигналов управления в операции 608, например, в ответ на сравнение удельной механической энергии в операции 606.
На фиг. 6B показана блок-схема устройства 690 согласно одному или более аспектам настоящего описания. Устройство 690 включает пользовательский интерфейс 692, буровую лебедку 694, приводную систему 696 и контроллер 698. Устройство 690 может применяться в пределах окружающей среды и/или устройства, показанного на фиг. 1, 3 и 4A-4C. Например, буровая лебедка 694 может являться по существу аналогичной буровой лебедке 130, показанной на фиг. 1, приводная система 696 может являться по существу аналогичной верхнему приводу 140, показанному на фиг. 1, и/или контроллер 698 может являться по существу аналогичным контроллеру 190, показанному на фиг. 1. Устройство 690 может также применяться при осуществлении способа 200a, показанного на фиг. 2A, способа 200b, показанного на фиг. 2B, способа 500, на фиг. 5A, и/или способа 600a, показанного на фиг. 6A.
Пользовательский интерфейс 692 и контроллер 698 могут являться отдельными элементами, которые связаны через проводные или беспроводные средства. Впрочем, пользовательский интерфейс 692 и контроллер 698 могут альтернативно являться составляющими элементами отдельной системы 699, как указано пунктирными линиями на фиг. 6B.
Пользовательский интерфейс 692 включает приспособления 692a для ввода пользователем одного или более заданных значений и/или диапазонов эффективности (например, MER) и приспособления 692b для ввода пользователем одного или более заданных значений и/или диапазонов диаметра долота. Каждое из приспособлений 692a, 692b для ввода данных может включать клавиатуру, устройство идентификации речи, диск, кнопку, выключатель, ползунковый селектор, переключатель, джойстик, мышку, базу данных (например, с информацией по смещению) и/или другое стандартное или перспективное устройство ввода данных. Такие приспособления для ввода данных могут поддерживать ввод данных из локальных и/или удаленных местоположений. В альтернативе, или дополнительно, приспособления 692a и/или 692b для ввода данных могут включать приспособление для выбора пользователем заданных значений или диапазонов MER и диаметра бурового долота, например, посредством одного или нескольких выпадающих меню. Данные MER и DIA, дополнительно или альтернативно, могут быть выбраны контроллером 698 при выполнении одного или более процедур поиска в базе данных. Обычно приспособление для ввода данных и/или другие элементы в объеме настоящего описания могут поддерживать работу и/или контроль системы со станций на буровой площадке, а также из одного или более удаленных местоположений, связанных с системой по линии связи, сети, локальной сети, глобальной сети, интернету и/или радио, среди прочих средств.
Пользовательский интерфейс 692 может также включать дисплей 692c для визуального отображения информации пользователю в текстовой, графической или видео форме. Дисплей 692c может также использоваться пользователем для введения данных MER и DIA во взаимодействии с приспособлениями 692a и 692b для ввода данных. Например, приспособления для ввода заданных данных кпд и диаметра долота 692a и 692b могут входить в состав или иным образом соединены с дисплеем 692c.
Буровая лебедка 694 включает датчик 694a скорости проходки, который предназначен для детектирования значения или диапазона скорости проходки, и может быть по существу аналогичен датчику 130a скорости проходки, показанному на фиг. 1. Данные скорости проходки, полученные с помощью датчика 694a скорости проходки, можно послать посредством электронного сигнала контроллеру 698 с помощью проводной или беспроводной передачи. Буровая лебедка 694 также включает контур 694b управления и/или другие средства для управления подачей и/или сматыванием бурового троса (такого как буровой трос 125, показанный на фиг. 1).
Приводная система 696 включает датчик 696a крутящего момента, который предназначен для детектирования значения или диапазона реактивного крутящего момента бурильной колонны, почти такие же, как датчик крутящего момента 140a и бурильная колонна 155, показанные на фиг. 1. Приводная система 696 также включает датчик 696b скорости долота, который предназначен для детектирования значения или диапазона частоты вращения бурового долота в стволе скважины (например, частота вращения бурового долота), почти такие же, как датчик 140b скорости долота, буровое долото 175 и ствол скважины 160, показанные на фиг. 1. Приводная система 696 также включает датчик 696c нагрузки на долото, который предназначен для детектирования значения или диапазона нагрузки на долото, почти такой же, как датчик 140c нагрузки на долото, показанный на фиг. 1. В альтернативе, или дополнительно, датчик нагрузки на долото 696c может быть расположен отдельно от приводной системы 696, в каком-либо другом элементе, показанном на фиг. 6B, либо в другом месте. Крутящий момент бурильной колонны, скорость вращения бурового долота и данные нагрузки на долото, полученные с помощью датчиков 696a, 696b, 696c, соответственно, можно послать посредством электронного сигнала в контроллер 698, с помощью проводной или беспроводной передачи. Приводная система 696 также включает контур 696d управления и/или другие средства, предназначенные для управления угловым положением, скоростью и направлением вала или другого элемента бурильной колонны, соединенного с приводной системой 696 (такого как вал 145, показанный на фиг. 1). Контур 696d управления и/или другой элемент приводной системы 696 может также включать средства для управления гидравлическим забойным двигателем (двигателями). Таким образом, частота вращения долота в рамках настоящего описания может включать данные по потокам бурового насоса, преобразованные в частоту вращения бурового долота гидравлического забойного двигателя, которые могут быть добавлены к частоте вращения колонны для определения общего значения частоты вращения долота.
Контроллер 698 предназначен для получения вышеописанных параметров удельной механической энергии от пользовательского интерфейса 692, буровой лебедки 694 и приводной системы 696 и использования параметров удельной механической энергии для непрерывного, периодического или иного вычисления удельной механической энергии. Контроллер 698 также предназначен для подачи сигнала буровой лебедке 694 и/или приводной системе 696 на основе расчетной удельной механической энергии. Например, контроллер 6980 может выполнить способ 200a, показанный на фиг. 2A, и/или способ 200b, показанный на фиг. 2B, и, следовательно, подать один или несколько сигналов буровой лебедке 694 и/или приводной системе 696 для увеличения или уменьшения нагрузки на долото и/или скорости вращения бурового долота, что может потребоваться для оптимизации эффективности бурения (на основе удельной механической энергии).
На фиг. 6C показана блок-схема способа 600b оптимизации процесса бурения на основе оперативно вычисленной удельной механической энергии согласно одному или более аспектам настоящего описания. Полученные данные могут использоваться во взаимодействии с любой из систем, раскрытых в настоящем описании. Способ 600b может быть выполнен с помощью устройства 100, показанного на фиг. 1, устройства 300, показанного на фиг. 3, устройства 400a, показанный на фиг. 4A, устройства 400b показанного на фиг. 4B, и/или устройства 690, показанного на фиг. 6B. Способ 600b может быть также выполнен совместно с выполнением способа 200a, показанного на фиг. 2A, способа 200b, показанного на фиг. 2B, и/или способа 600a, показанного на фиг. 6A. Способ 600b, показанный на фиг. 6C, может включать или формировать, по меньшей мере, часть способа 600a, показанного на фиг. 6A.
В ходе операции 612 способа 600b базовую удельную механическую энергию определяют для оптимизации эффективности бурения на основе удельной механической энергии, путем изменения нагрузки на долото. Поскольку базовая удельная механическая энергия, определенная в операции 612, используется для оптимизации путем изменения нагрузки на долото, в настоящем описании используется условное обозначение MSEBLWOB.
В следующей операции 614 изменяют нагрузку на долото. Такое изменение может включать либо увеличение, либо уменьшение нагрузки на долото. Увеличение или уменьшение нагрузки на долото в ходе операции 614 могут происходить в пределах определенных, заданных предельных значений нагрузки на долото. Например, изменение нагрузки на долото может составлять не более чем приблизительно 10%. Впрочем, другие проценты также включены в объем настоящего описания, где такие проценты находятся в пределах или вне заданных пределов нагрузки на долото. Нагрузка на долото может быть изменена вручную, посредством ввода оператора, или нагрузка на долото может быть изменена автоматически, посредством сигналов, переданных контроллером, системой управления и/или другим элементом буровой установки и связанным устройством. Как указано выше, такие сигналы могут подаваться посредством удаленного управления из другого местоположения.
После этого в ходе операции 616 бурение продолжается с измененной нагрузкой на долото в течение заданного интервала бурения ΔWOB. Интервал ΔWOB может представлять собой заданный период времени, например пять минут, десять минут, тридцать минут или какой-либо другой продолжительности. В альтернативе интервал ΔWOB может являться заданной глубиной проходки при бурении. Например, операция 616 может включать продолжение бурения с измененной нагрузкой на долото до тех пор, пока существующий ствол скважины не будет углублен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Интервал ΔWOB может также включать и временную, и глубинную составляющие. Например, интервал ΔWOB может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет углублен на десять футов. В другом примере интервал ΔWOB может включать бурение до тех пор, пока ствол скважины не будет углублен на двадцать футов, но не более чем в течение девяноста минут. Конечно, вышеописанные значения времени и глубины для интервала ΔWOB являются лишь примерами, и многие другие значения также включены в объем настоящего описания.
После продолжения бурения в течение интервала ΔWOB с измененной нагрузкой на долото выполняют операцию 618 для определения MSEΔWOB, полученной в результате работы с измененной нагрузкой на долото в течение интервала ΔWOB. В следующей операции решения 620 измененную MSEΔWOB сравнивают с базовой MSEBLWOB. Если измененная MSEΔWOB является предпочтительной по сравнению с MSEBLWOB, способ 600b продолжают до операции 622. А если измененная MSEΔWOB не является предпочтительной по сравнению с MSEBLWOB, способ 600b продолжают до операции 624, в которой нагрузку на долото восстанавливают до его значения перед тем, как была выполнена операция 614, и затем способ продолжают до операции 622.
Определение, производимое в ходе операции решения 620, может быть выполнено вручную или автоматически, контроллером, системой управления и/или другим элементом буровой установки и связанным устройством. Определение может включать определение значения MSEΔWOB как предпочтительное, если оно меньше и/или по существу равно MSEBLWOB. Впрочем, дополнительные или альтернативные факторы могут также играть роль в определении, выполняемом в ходе операции 620.
В ходе операции 622 способа 600b определяют базовую удельную энергию для оптимизации эффективности бурения на основе удельной механической энергии путем изменения частоты вращения долота. Поскольку базовая удельная механическая энергия, определенная в операции 622, используется для оптимизации путем изменения частоты вращения бурового долота, в настоящем описании используется обозначение MSEBLRPM.
В следующей операции 626 изменяют частоту вращения бурового долота. Такое изменение может включать либо увеличение, либо уменьшение частоты вращения бурового долота. Увеличение или уменьшение частоты вращения бурового долота в ходе операции 626 может происходить в пределах определенных, заданных предельных значений частоты вращения бурового долота. Например, изменение частоты вращения бурового долота может составлять не более чем приблизительно 10%. Впрочем, другие проценты также включены в объем настоящего описания, где такие проценты находятся в пределах или вне заданных пределов частоты вращения бурового долота. Частота вращения бурового долота может быть изменена вручную, посредством ввода оператора, или частота вращения бурового долота может быть изменена автоматически, посредством сигналов, переданных контроллером, системой управления и/или другим элементом буровой установки и связанным усройством.
После этого, в ходе операции 628, бурение продолжают с измененной частотой вращения бурового долота в течение заданного интервала бурения ΔRPM. Интервал ΔRPM может представлять собой заданный период времени, например пять минут, десять минут, тридцать минут или некоторой другой продолжительности. В альтернативе интервал ΔRPM может являться заданной глубиной проходки при бурении. Например, операция 628 может включать продолжение бурения с измененной частотой вращения бурового долота до тех пор, пока существующий ствол скважины не будет углублен на пять футов, десять футов, пятьдесят футов или некоторую другую глубину. Интервал ΔRPM может также включать и временную, и глубинную составляющие. Например, интервал ΔRPM может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет углублен на десять футов. В другом примере интервал ΔRPM может включать бурение до тех пор, пока ствол скважины не будет углублен на двадцать футов, но не более чем в течение девяноста минут. Конечно, вышеописанные значения времени и глубины для интервала ΔRPM являются лишь примерами, и многие другие значения также включены в объем настоящего описания.
После продолжения процесса бурения в течение интервала ΔRPM с измененной частотой вращения бурового долота выполняют операцию 630 с целью определения MSEΔRPM, полученной в результате работы с измененной частотой вращения бурового долота в течение интервала ΔRPM. В следующей операции решения 632 измененная MSEΔRPM сравнивают с базовой MSEBLRPM. Если измененная MSEΔRPM является предпочтительной по сравнению с MSEBLRPM, способ 600b возвращают к операции 612. А если измененная MSEΔRPM не является предпочтительной по сравнению с MSEBLRPM, способ 600b продолжают до стадии 634, в которой частоту вращения бурового долота восстанавливают до его значения перед тем, как была выполнена операция 626, и затем способ продолжают до операции 612.
Определение, сделанное в ходе операции решения 632, может быть выполнено вручную или автоматически, контроллером, системой управления и/или другим элементом буровой установки и связанным устройством. Определение может включать определение значения MSEΔRPM как предпочтительное, если оно меньше и/или по существу равно MSEBLRPM. Впрочем, дополнительные или альтернативные факторы также могут играть роль в определении, выполняемом в ходе операции 632.
Кроме того, после выполнения операций 632 и/или 634 способ 600b не должен быть немедленно возвращен к операции 612 при следующей итерации. Например, следующая итерация способа 600b может быть задержана на заданный промежуток времени или до проходки на заданную глубину. В альтернативе, способ 600b может закончиться после выполнения операций 632 и/или 634.
На фиг. 6D показана блок-схема способа 600c оптимизации процесса бурения на основе оперативно вычисленной удельной механической энергии согласно одному или более аспектам настоящего описания. Способ 600c может быть выполнен с помощью устройства 100, показанного на фиг. 1, устройства 300, показанного на фиг. 3, устройства 400a, показанного на фиг. 4A, устройства 400b, показанного на фиг. 4B, и/или устройства 690, показанного на фиг. 6B. Способ 600c может быть также выполнен во взаимодействии с выполнением способа 200a, показанного на фиг. 2A, способа 200b, показанного на фиг. 2B, способа 600a, показанного на фиг. 6 A, и/или способа 600b, показанного на фиг. 6C. Способ 600c, показанный на фиг. 6D, может включать или формировать, по меньшей мере, часть способа 600a, показанного на фиг. 6A, и/или способа 600b, показанного на фиг. 6C.
В ходе операции 640 способа 600c определяют базовую удельную механическую энергию для оптимизации эффективности бурения на основе удельной механической энергии путем уменьшения нагрузки на долото. Поскольку базовая удельная механическая энергия, определенная в операции 640, используется для оптимизации путем уменьшения нагрузки на долото, в настоящем описании используется обозначение MSEBL-WOB.
В следующей операции 642 уменьшают нагрузку на долото. Уменьшение нагрузки на долото в ходе операции 642 может происходить в пределах определенных, заданных предельных значений нагрузки на долото. Например, уменьшение нагрузки на долото может составлять не более чем приблизительно 10%. Впрочем, другие проценты также включены в объем настоящего описания, где такие проценты находятся в пределах или вне заданных пределов нагрузки на долото. Нагрузка на долото может быть вручную уменьшена посредством ввода оператора, или нагрузка на долото может быть автоматически уменьшена посредством сигналов, переданных контроллером, системой управления и/или другим элементом буровой установки и связанным устройством.
После этого, в ходе операции 644, бурение продолжают с уменьшенной нагрузкой на долото в течение заданного интервала бурения -ΔWOB. Интервал -ΔWOB может представлять собой заданный период времени, например пять минут, десять минут, тридцать минут или некоторой другой продолжительности. В альтернативе интервал -ΔWOB может являться заданной глубиной проходки при бурении. Например, операция 644 может включать продолжение процесса бурения с уменьшенной нагрузкой на долото до тех пор, пока существующий ствол скважины не будет углублен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Интервал -ΔWOB может также включать и временную, и глубинную составляющую. Например, интервал -ΔWOB может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины будет углублен на десять футов. В другом примере интервал -ΔWOB может включать бурение до тех пор, пока ствол скважины не будет углублен на двадцать футов, но не более чем в течение девяноста минут. Конечно, вышеописанные значения времени и глубины для интервала -ΔWOB являются лишь примерами, и многие другие значения также включены в объем настоящего описания.
После продолжения процесса бурения в течение интервала -ΔWOB с уменьшенной нагрузкой на долото, выполняют операцию 646 с целью определения MSE-ΔWOB, полученной в результате работы с уменьшенной нагрузкой на долото в течение интервала -ΔWOB. В следующей операции решения 648 уменьшенную MSE-ΔWOB сравнивают с базовой MSEBL-WOB. Если уменьшенная MSE-ΔWOB является предпочтительной по сравнению с MSEBL-WOB, то способ 600c продолжают до операции 652. А если уменьшенная MSE-ΔWOB не является предпочтительной по сравнению с MSEBL-WOB, способ 600c продолжают до операции 650, в которой нагрузку на долото восстанавливают до ее значения перед тем, как была выполнена операция 642, и затем способ продолжают до операции 652.
Определение, сделанное в ходе операции решения 648, может быть выполнено вручную или автоматически, контроллером, системой управления и/или другим элементом буровой установки и связанным устройством. Определение может включать определение значения MSE-ΔWOB как предпочтительное, если оно меньше и/или по существу равно MSEBL-WOB. Впрочем, дополнительные или альтернативные факторы могут также играть роль в определении, выполняемом в ходе операции 648.
В ходе операции 652 способа 600c определяют базовую удельную механическую энергию для оптимизации эффективности бурения на основе удельной механической энергии путем увеличения нагрузки на долото. Поскольку базовая удельная механическая энергия, определенная в операции 652, используется для оптимизации путем увеличения нагрузки на долото, в настоящем описании используется обозначение MSEBL+WOB.
В следующей операции 654 увеличивают нагрузку на долото. Увеличение нагрузки на долото в ходе операции 654 может происходить в пределах определенных, заданных предельных значений нагрузки на долото. Например, увеличение нагрузки на долото может составлять не более чем приблизительно 10%. Впрочем, другие проценты также включены в объем настоящего описания, где такие проценты находятся в пределах или вне заданных пределов нагрузки на долото. Нагрузка на долото может быть вручную увеличена посредством ввода оператора, или нагрузку на долото может быть автоматически увеличена, посредством сигналов, переданных контроллером, системой управления и/или другим элементом буровой установки и связанным устройством.
После этого, в ходе операции 656, бурение продолжают с увеличенной нагрузкой на долото в течение заданного интервала бурения +ΔWOB. Интервал +ΔWOB может представлять собой заданный период времени, например пять минут, десять минут, тридцать минут или некоторой другой продолжительности. В альтернативе интервал
+ΔWOB может являться заданной глубиной проходки при бурении. Например, операция 656 может включать продолжение процесса бурения с увеличенной нагрузкой на долото до тех пор, пока существующий ствол скважины не будет углублен на пять футов, десять футов, пятьдесят футов или некоторую другую глубину. Интервал +ΔWOB может также включать и временную, и глубинную составляющие. Например, интервал +ΔWOB может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет углублен на десять футов. В другом примере, интервал +ΔWOB может включать бурение до тех пор, пока ствол скважины не будет углублен на двадцать футов, но не более чем в течение девяноста минут.
После продолжения процесса бурения в течение интервала +ΔWOB с увеличенной нагрузкой на долото выполняют операцию 658 с целью определения MSE+ΔWOB, полученной в результате работы с увеличенной нагрузкой на долото в течение интервала +ΔWOB. В следующей операции решения 660 измененную MSE+ΔWOB сравнивают с базовой MSEBL+WOB. Если измененная MSE+ΔWOB является предпочтительной по сравнению с MSEBL+WOB, способ 600c продолжают до операции 664. А если измененная MSE+ΔWOB не является предпочтительной по сравнению с MSEBL+WOB, способ 600c продолжают до операции 662, в которой нагрузку на долото восстанавливают до ее значения перед тем, как была выполнена операция 654, и затем способ продолжают до операции 664.
Определение, сделанное в ходе операции решения 660, может быть выполнено вручную или автоматически, контроллером, системой управления и/или другим элементом буровой установки и связанным устройством. Определение может включать определение значения MSE+ΔWOB как предпочтительное, если оно меньше и/или по существу равно MSEBL+WOB. Впрочем, дополнительные или альтернативные факторы могут также играть роль в определении, выполняемом в ходе операции 660.
В ходе операции 664 способа 600c определяют базовую удельную механическую энергию для оптимизации эффективности бурения на основе удельной механической энергии путем уменьшения частоты вращения долота, частоты вращения бурового долота. Поскольку базовая удельная механическая энергия, определенная в операции 664, используется для оптимизации путем уменьшения частоты вращения бурового долота, в настоящем описании используется обозначение MSEBL-RPM.
В следующей операции 666 уменьшают частоту вращения бурового долота. Уменьшение частоты вращения бурового долота в ходе операции 666 может происходить в пределах определенных заданных предельных значений частоты вращения бурового долота. Например, уменьшение частоты вращения бурового долота может составлять не более чем приблизительно 10%. Впрочем, другие проценты также включены в объем настоящего описания, где такие проценты находятся в пределах или вне заданных пределов частоты вращения бурового долота. Частота вращения бурового долота может быть уменьшена вручную, посредством ввода оператора, или частота вращения бурового долота может быть уменьшена автоматически, посредством сигналов, переданных контроллером, системой управления и/или другим элементом буровой установки и связанным устройством.
После этого в ходе операции 668 бурение продолжают с уменьшенной частотой вращения бурового долота в течение заданного интервала бурения -ΔRPM. Интервал -ΔRPM может представлять собой заданный период времени, например пять минут, десять минут, тридцать минут или некоторой другой продолжительности. В альтернативе интервал -ΔRPM может являться заданной глубиной проходки при бурении. Например, операция 668 может включать продолжение процесса бурения с уменьшенной частотой вращения бурового долота до тех пор, пока существующий ствол скважины не будет углублен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Интервал -ΔRPM может также включать и временную, и глубинную сотавляющие. Например, интервал -ΔRPM может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет углублен на десять футов. В другом примере интервал -ΔRPM может включать бурение до тех пор, пока ствол скважины не будет углублен на двадцать футов, но не более чем в течение девяноста минут.
После продолжения процесса бурения в течение интервала -ΔRPM с уменьшенной частотой вращения бурового долота выполняют операцию 670 с целью определения MSE-ΔRPM, полученной в результате работы с уменьшенной частотой вращения бурового долота в течение интервала -ΔRPM. В следующей операции решения 672 уменьшенную MSE-ΔRPM сравнивают с базовой MSEBL-RPM. Если измененная MSE-ΔRPM является предпочтительной по сравнению с MSEBL-RPM, способ 600c продолжают до операции 676. А если измененная MSE-ΔRPM не является предпочтительной по сравнению с MSEBL-RPM, способ 600c продолжают до операции 674, в которой частоту вращения бурового долота восстанавливают до его значения перед тем, как была выполнена операция 666, и затем способ продолжают до операции 676.
Определение, сделанное в ходе операции решения 672, может быть выполнено вручную или автоматически, контроллером, системой управления и/или другим элементом буровой установки и связанным устройством. Определение может включать определение значения MSE-ΔRPM как предпочтительное, если оно меньше и/или по существу равно MSEBL-RPM. Впрочем, дополнительные или альтернативные факторы могут также играть роль в определении, выполняемом в ходе операции 672.
В ходе операции 676 способа 600c определяют базовую удельную механическую энергию для оптимизации эффективности бурения на основе удельной механической энергии путем увеличения частоты вращения долота, частоты вращения бурового долота. Поскольку базовая удельная механическая энергия, определенная в операции 676, используется для оптимизации путем увеличения частоты вращения бурового долота, в настоящем описании используется обозначение MSEBL+RPM.
В следующей операции 678 увеличивают частоту вращения бурового долота. Увеличение частоты вращения бурового долота в ходе операции 678 может происходить в пределах определенных, заданных предельных значений частоты вращения бурового долота. Например, увеличение частоты вращения бурового долота может составлять не более чем приблизительно 10%. Впрочем, другие проценты также включены в объем настоящего описания, где такие проценты находятся в пределах или вне заданных пределов частоты вращения бурового долота. Частота вращения бурового долота может быть увеличена вручную, посредством ввода оператора, или частота вращения бурового долота может быть увеличена автоматически, посредством сигналов, переданных контроллером, системой управления и/или другим элементом буровой установки и связанным устройством.
После этого, в ходе операции 680, бурение продолжают с увеличенной частотой вращения бурового долота в течение заданного интервала бурения +ΔRPM. Интервал +ΔRPM может представлять собой заданный период времени, например пять минут, десять минут, тридцать минут или некоторой другой продолжительности. В альтернативе интервал +ΔRPM может являться заданной глубиной проходки при бурении. Например, операция 680 может включать продолжение процесса бурения с увеличенной частотой вращения бурового долота до тех пор, пока существующий ствол скважины не будет углублен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Интервал +ΔRPM может также включать и временную, и глубинную составляющие. Например, интервал +ΔRPM может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет углублен на десять футов. В другом примере интервал +ΔRPM может включать бурение до тех пор, пока ствол скважины не будет углублен на двадцать футов, но не более чем в течение девяноста минут.
После продолжения процесса бурения в течение интервала +ΔRPM с увеличенной частотой вращения бурового долота выполняют операцию 682 с целью определения MSE+ΔRPM, полученной в результате работы с увеличенной частотой вращения бурового долота в течение интервала +ΔRPM. В следующей операции решения 684 увеличенная MSE+ΔRPM сравнивают с базовой MSEBL+RPM. Если измененная MSE+ΔRPM является предпочтительной по сравнению с MSEBL+RPM, способ 600c продолжают до операции 688. А если измененная MSE+ΔRPM не является предпочтительной по сравнению с MSEBL+RPM, способ 600c продолжают до операции 686, в которой частоту вращения бурового долота восстанавливают до его значения перед тем, как была выполнена операция 678, и затем способ продолжают до операции 688.
Определение, сделанное в ходе операции решения 684, может быть выполнено вручную или автоматически, контроллером, системой управления и/или другим элементом буровой установки и связанным устройством. Определение может включать определение значения MSE+ΔRPM как предпочтительное, если оно меньше и/или по существу равно MSEBL+RPM. Впрочем, дополнительные или альтернативные факторы могут также играть роль в определении, выполняемом в ходе операции 684.
Операция 688 включает ожидание в течение заданного периода времени или интервал глубины бурения перед повтором способа 600c с возвратом к операции 640. При этом в примере осуществления интервал может составлять до 0 секунд или 0 футов, а способ возвращают к операции 640 по существу сразу после выполнения операций 684 и/или 686. В альтернативе способ 600c может не требовать итерации, при этом способ 600c может по существу завершаться после выполнения операций 684 и/или 686.
Кроме того, интервалы бурения ΔWOB, +ΔWOB, - ΔRPM и +ΔROM могут быть по существу идентичными в пределах одной итерации способа 600c. В альтернативе один или более интервалов могут изменяться в продолжительности или глубине по сравнению с другими интервалами. Точно так же величина, на которую нагрузка на долото уменьшается и увеличивается в операциях 642 и 654, может являться по существу идентичной или может изменяться по отношению друг к другу в пределах одной итерации способа 600c. Величина, на которую частота вращения бурового долота уменьшается и увеличивается в операциях 666 и 678, может являться по существу идентичной или может изменяться по отношению друг к другу в пределах одной итерации способа 600c. Изменения нагрузки на долото и частоты вращения бурового долота могут также изменяться или оставаться такими же относительно последующих итераций способа 600c.
Как описано выше, один или более аспектов настоящего описания могут использоваться в процессе бурения или для его контроля на основе удельной механической энергии. Впрочем, один или более аспектов настоящего описания, дополнительно или альтернативно, могут применяться в процессе бурения или для его контроля на основе ΔT. Таким образом, как описано выше, в процессе бурения крутящий момент передается от верхнего привода или другого привода вращения к бурильной колонне. Крутящий момент, требуемый для вращения долота, может упоминаться как крутящий момент на долоте, и может контролироваться с использованием датчика, такого как датчик крутящего момента 140a, показанный на фиг. 1, датчик 355 крутящего момента, показанный на фиг. 3, один или более датчиков 430, показанных на фиг. 4A и 4B, датчик 696a крутящего момента, показанный на фиг. 6B, и/или одно или более устройств для измерения крутящего момента ОНБК.
В ходе бурения бурильная колонна подвергается различным типам вибрации, включая осевые (продольные) колебания, изгибные (поперечные) колебания и крутильные (вращательные) колебания. Крутильные колебания обусловлены нелинейным взаимодействием между долотом, бурильной колонной и стволом скважины. Как описано выше, указанная крутильная вибрация может включать прерывистые колебания, характеризуемые периодическими остановками (в ходе которых ОНБК "прилипает" к стволу скважины), и интервалы с большой угловой скоростью ОНБК (в ходе которых ОНБК "скользит" относительно ствола скважины).
Прерывистое движение ОНБК вызывает оперативные изменения крутящего момента на долоте или ΔT. Данная ΔT может использоваться для обеспечения Сигнализации прерывистого движения (СПД) согласно одному или более аспектам настоящего описания. Например, параметр ΔT или СПД могут быть отображены визуально с помощью индикатора "Stop Light" (стоп-сигнал), зеленое свечение которого может указывать на приемлемый режим работы (например, параметр СПД равен 0-15), желтый свет может указывать, что неизбежно прерывистое движение (например, параметр СПД равен 16-25), и красный свет может указывать, что прерывистое движение, вероятно, уже происходит (например, параметр СПД превышает 25). Впрочем, данные примерные пороговые значения могут регулироваться в ходе работы, поскольку они могут изменяться в зависимости от условий бурения. Параметр ΔT или СПД, альтернативно или дополнительно, могут быть отображены графически (например, путем показа текущих и предыдущих данных), акустически (например, с помощью сигнализатора) и/или посредством приборной панели или индикатора прибора. Комбинации данных вариантов отображения также включены в объем настоящего описания. Например, вышеописанный индикатор "Stop Light" может непрерывно показывать параметр СПД независимо от его значения, а акустический аварийный сигнал может быть запущен, если параметр СПД превышает заданное значение (например, 25).
Контроллер процесса бурения или другое устройство в рамках настоящего описания может включать один или более аспектов процесса или контроля бурения, основанных на параметре ΔT или СПД, как описано выше. Например, контроллер, такой как контроллер 190, показанный на фиг. 1, контроллер 325, показанный на фиг. 3, контроллер 420, показанный на фиг. 4A или 4B, и/или контроллер 698, показанный на фиг. 6B, может автоматически регулировать частоту вращения бурового долота бурильной колонны с коротким импульсом увеличения или уменьшения частоты вращения бурового долота (например, +/-5 частоты вращения бурового долота), прерывая гармоничную прерывистую вибрацию либо до, либо в момент обнаружения прерывистого движения, а затем возвращаться до нормальной частоты вращения бурового долота. Контроллер может служить для автоматического повышения или снижения частоты вращения бурового долота на заданную или регулируемую пользователем величину или процент в течение заданной или регулируемой пользователем продолжительности, при попытке выведения процесса бурения из гармонического состояния. В альтернативе контроллер может автоматически продолжать повышать или понижать частоту вращения бурового долота с приращением до тех пор, пока параметр ΔT или СПД не будет указывать, что работа с прерывистым движением была остановлена.
В примере осуществления контроллер с поддержкой ΔT или СПД может дополнительно автоматически уменьшать нагрузку на долото, если прерывистое движение интенсивное, что может быть обусловлено избыточно высокой целевой нагрузкой на долото. Такое автоматическое снижение нагрузки на долото может включать одну регулировку или пошаговую регулировку, кратковременную или длительную, и может быть продолжено, пока параметр ΔT или СПД не будет указывать, что прерывистая работа была остановлена.
Контроллер с поддержкой ΔT или СПД может дополнительно автоматически повышать нагрузку на долото, например, чтобы найти верхний предел нагрузки на долото при прерывистом движении. Например, если все другие возможные параметры бурения оптимизированы или отрегулированы в пределах соответствующих диапазонов, контроллер может автоматически повышать нагрузку на долото с приращением, пока параметр ΔT или СПД не приблизится или не сравняется с его верхним пределом (например, 25).
В примере осуществления процесс или контроль бурения на основе ΔT, согласно одному или более аспектам настоящего описания, может функционировать согласно одному или более аспектам следующего псевдокода:
IF (counter <= Process_Time)
IF (counter = = 1)
Minimum_Torque = Realtime_Torque
PRINT ("Minimum", Minimum_Torque)
Maximum_Torque = Realtime_Torque
PRINT ("Maximum", Maximum_Torque)
END
IF (Realtime_Torque < Minimum_Torque)
Minimum_Torque = Realtime_Torque
END
IF (Maximum_Torque < Realtime_Torque)
Maximum_Torque = Realtime_Torque
END
Torque_counter = (Torque_counter + Realtime_Torque)
Average_Torque = (Torque_counter / counter)
counter = counter + 1
PRINT ("Process_Time", Process_Time)
ELSE
SSA = ((Maximum_Torque - Minimum_Torque)/Average_Torque)*100
где Process_Time является временем, прошедшим с начала контроля параметра ΔT или СПД, Minimum_Torque является минимальным крутящим моментом на долоте, который присутствует в течение Process_Time, Maximum_Torque является максимальным крутящим моментом на долоте, который присутствует в течение Process_Time, Realtime_Torque является текущим крутящим моментом на долоте, Average_Torque является средним крутящим моментом на долоте в течение Process_Time и СПД является параметром Сигнализации прерывистого движения.
Как описано выше, параметр ΔT или СПД может применяться в, или иначе согласно способу 200a, показанному на фиг. 2A, способу 200b, показанному на фиг. 2B, способу 600a, показанному на фиг. 6A, способу 600b, показанному на фиг. 6C, и/или способу 600c, показанному на фиг. 6D. Например, как показано на фиг. 7A, параметр ΔT или СПД можно заменить параметром удельной механической энергии, описанным выше применительно к фиг. 6A. В альтернативе параметр ΔT или СПД могут отслеживаться в дополнение к параметру удельной механической энергии, описанному выше в отношении фиг. 6A, при этом процесс или контроль бурения основан и на удельной механической энергии, и на параметре ΔT или СПД.
На фиг. 7A показана блок-схема способа 700a согласно одному или более аспектам настоящего описания. Способ 700a может быть выполнен во взаимодействии с одним или более элементами устройства 100, показанного на фиг. 1, устройства 300, показанного на фиг. 3, устройства 400a, показанного на фиг. 4A, устройства 400b, показанного на фиг. 4B, и/или устройства 690, показанного на фиг. 6B, в ходе их работы.
Способ 700a включает операцию 702, в ходе которой измеряются текущие параметры ΔT. В следующей операции 704 вычисляют ΔT. Если ΔT в достаточной мере равен желаемому ΔT или иначе идеальному, как определено в ходе операции решения 706, способ 700a повторяют, и повторяют операцию 702. "Идеальный" может соответствовать описанному выше. Итерация способа 700a может выполняться по существу немедленно, или перед итерацией способа 700a может присутствовать период задержки, после которого повторяется операция 702. Если ΔT не является идеальным, как определено в ходе операции решения 706, способ 700a продолжают до операции 708, в ходе которой один или несколько параметров бурения (например, нагрузка на долото, частота вращения бурового долота и т.д.) регулируют с целью улучшения ΔT. После выполнения операции 708 способ 700a повторяют, а также повторяют операцию 702. Такая итерация может выполняться по существу немедленно, или перед итерацией способа 700a может присутствовать период задержки, после которого повторяется операция 702.
На фиг. 7B показана блок-схема способа 700b контроля ΔT и/или СПД согласно одному или более аспектам настоящего описания. Способ 700b может быть выполнен с помощью устройства 100, показанного на фиг. 1, устройства 300, показанного на фиг. 3, устройства 400a, показанного на фиг. 4A, устройства 400b, показанного на фиг. 4B, и/или устройства 690, показанного на фиг. 6B. Способ 700b может быть также выполнен во взаимодействии с выполнением способа 200a, показанного на фиг. 2A, способа 200b, показанного на фиг. 2B, способ 600a показанный на фиг. 6A, способ 600b показанный на фиг. 6C, способ 600c показанный на фиг. 6D, и/или способ 700a, показанный на фиг. 7A. Способ 700b, показанный на фиг. 7B, может включать или формировать, по меньшей мере, часть способа 700a, показанного на фиг. 7A.
В ходе операции 712 способа 700b определяют базовое ΔT для оптимизации на основе ΔT путем изменения нагрузки на долото. Поскольку базовое ΔT, определенное в операции 712, используется для оптимизации путем изменения нагрузки на долото, в настоящем описании используется обозначение ΔTBLWOB.
В следующей операции 714 изменяют нагрузку на долото. Такое изменение может включать либо увеличение, либо уменьшение нагрузки на долото. Увеличение или уменьшение нагрузки на долото в ходе операции 714 могут происходить в пределах определенных заданных предельных значений нагрузки на долото. Например, изменение нагрузки на долото может составлять не более чем приблизительно 10%. Впрочем, другие проценты также включены в объем настоящего описания, где такие проценты находятся в пределах или вне заданных пределов нагрузки на долото. Нагрузка на долото может быть изменена вручную, посредством ввода оператора, или нагрузка на долото может быть изменена автоматически, посредством сигналов, переданных контроллером, системой управления и/или другим элементом буровой установки и связанным устройством. Как указано выше, такие сигналы могут подаваться посредством удаленного управления из другого местоположения.
После этого в ходе операции 716, бурение продолжают с измененной нагрузкой на долото в течение заданного интервала бурения ΔWOB. Интервал ΔWOB может являться заданным периодом времени, например пять минут, десять минут, тридцать минут или некоторой другой продолжительности. В альтернативе интервал ΔWOB может являться заданной глубиной проходки при бурении. Например, операция 716 может включать продолжение процесса бурения с измененной нагрузкой на долото до тех пор, пока существующий ствол скважины не будет углублен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Интервал ΔWOB может также включать и временную, и глубинную составляющие. Например, интервал ΔWOB
может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет углублен на десять футов. В другом примере интервал ΔWOB может включать бурение до тех пор, пока ствол скважины не будет углублен на двадцать футов, но не более чем в течение девяноста минут. Конечно, вышеописанные значения времени и глубины для интервала ΔWOB являются лишь примерами, и многие другие значения также включены в объем настоящего описания.
После продолжения процесса бурения в течение интервала ΔWOB с измененной нагрузкой на долото выполняют операцию 718 с целью определения ΔTΔWOB, полученного в результате работы с измененной нагрузкой на долото в течение интервала ΔWOB. В следующей операции решения 720 измененный ΔTΔWOB сравнивают с базовым ΔTBLWOB. Если измененный ΔTΔWOB является предпочтительным по сравнению с ΔTBLWOB, способ 700b продолжают до операции 722. А если измененный ΔTΔWOB не является предпочтительным по сравнению с ΔTBLWOB, способ 700b продолжают до операции 724, в которой нагрузку на долото восстанавливают до ее значения перед тем, как была выполнена операция 714, и затем способ продолжают до операции 722.
Определение, сделанное в ходе операции решения 720, может быть выполнено вручную или автоматически, контроллером, системой управления и/или другим элементом буровой установки и связанным устройством. Определение может включать определение значения ΔTΔWOB как предпочтительное, если оно меньше и/или по существу равно ΔTBLWOB. Впрочем, дополнительные или альтернативные факторы могут также играть роль в определении, выполняемом в ходе операции 720.
В ходе операции 722 способа 700b определяют базовое ΔT для оптимизации на основе ΔT путем изменения частоты вращения долота. Поскольку базовое ΔT, определенное в операции 722, используется для оптимизации путем изменения частоты вращения бурового долота, в настоящем описании используется обозначение ΔTBLRPM.
В следующей операции 726 изменяют частоту вращения бурового долота. Такое изменение может включать либо увеличение, либо уменьшение частоты вращения бурового долота. Увеличение или уменьшение частоты вращения бурового долота в ходе операции 726 могут происходить в пределах определенных заданных предельных значений частоты вращения бурового долота. Например, изменение частоты вращения бурового долота может составлять не более чем приблизительно 10%. Впрочем, другие проценты также включены в объем настоящего описания, где такие проценты находятся в пределах или вне заданных пределов частоты вращения бурового долота. Частота вращения бурового долота может быть изменена вручную, посредством ввода оператора, или частота вращения бурового долота может быть изменена автоматически, посредством сигналов, переданных контроллером, системой управления и/или другим элементом буровой установки и связанным устройством.
После этого в ходе операции 728, бурение продолжают с измененной частотой вращения бурового долота в течение заданного интервала бурения ΔRPM. Интервал ΔRPM может представлять собой заданный период времени, например пять минут, десять минут, тридцать минут или некоторой другой продолжительности. В альтернативе интервал ΔRPM может являться заданной глубиной проходки при бурении. Например, операция 728 может включать продолжение процесса бурения с измененной частотой вращения бурового долота до тех пор, пока существующий ствол скважины не будет углублен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Интервал ΔRPM может также включать и временную, и глубинную составляющие. Например, интервал ΔRPM может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет углублен на десять футов. В другом примере интервал ΔRPM может включать бурение до тех пор, пока ствол скважины не будет углублен на двадцать футов, но более чем в течение девяноста минут. Конечно, вышеописанные значения времени и глубины для интервала ΔRPM являются лишь примерами, и многие другие значения также включены в объем настоящего описания.
После продолжения процесса бурения в течение интервала ΔRPM с измененной частотой вращения бурового долота, выполняют операцию 730 с целью определения ΔTΔRPM, полученного в результате работы с измененной частотой вращения бурового долота в течение интервала ΔRPM. В следующей операции решения 732 измененный ΔTΔRPM сравнивают с базовым ΔTBLRPM. Если измененный ΔTΔRPM является предпочтительным по сравнению с ΔTBLRPM, способ 700b возвращают к операции 712. А если измененный ΔTΔRPM не является предпочтительным по сравнению с ΔTBLRPM, способ 700b продолжают до операции 734, в которой частоту вращения бурового долота восстанавливают до его значения перед тем, как была выполнена операция 726, и затем способ продолжают до операции 712.
Определение, сделанное в ходе операции решения 732, может быть выполнено вручную или автоматически, контроллером, системой управления и/или другим элементом буровой установки и связанным устройством. Определение может включать определение значения ΔTΔRPM как предпочтительное, если оно меньше и/или по существу равно ΔTBLRPM. Впрочем, дополнительные или альтернативные факторы могут также играть роль в определении, выполняемом в ходе операции 732.
Кроме того, после выполнения операций 732 и/или 734 способ 700b может не возвращаться сразу к операции 712 в следующей итерации. Например, следующая итерация способа 700b может быть задержана на заданный промежуток времени или до заданной глубины бурения. В альтернативе способ 700b может закончиться после выполнения операции 732 и/или 734.
На фиг. 7C показана блок-схема способа 700c оптимизации процесса бурения, основанного на оперативно вычисленном ΔT согласно одному или более аспектам настоящего описания. Способ 700c может быть выполнен с помощью устройства 100, показанного на фиг. 1, устройства 300, показанного на фиг. 3, устройства 400a, показанного на фиг. 4A, устройства 400b, показанного на фиг. 4B, и/или устройства 690, показанного на фиг. 6B. Способ 700c может быть также выполнен во взаимодействии с выполнением способа 200a, показанного на фиг. 2A, способа 200b, показанного на фиг. 2B, способа 600a, показанного на фиг. 6A, способа 600b, показанного на фиг. 6C, способа 600c, показанного на фиг. 6D, способа 700a, показанного на фиг. 7A, и/или способа 700b, показанного на фиг. 7B. Способ 700c, показанный на фиг. 7C, может включать или формировать, по меньшей мере, часть способа 700a, показанного на фиг. 7A, и/или способа 700b, показанного на фиг. 7B.
В ходе операции 740 способа 700c определяют базовое ΔT для оптимизации на основе ΔT путем уменьшения нагрузки на долото. Поскольку базовое ΔT, определенное в операции 740, используется для оптимизации путем уменьшения нагрузки на долото, в настоящем описании используется обозначение ΔTBL-WOB.
В следующей операции 742 уменьшают нагрузку на долото. Уменьшение нагрузки на долото в ходе операции 742 может происходить в пределах определенных, заданных предельных значений нагрузки на долото. Например, уменьшение нагрузки на долото может составлять не более чем приблизительно 10%. Впрочем, другие проценты также включены в объем настоящего описания, где такие проценты находятся в пределах или вне заданных пределов нагрузки на долото. Нагрузка на долото может быть уменьшена вручную, посредством ввода оператора или автоматически посредством сигналов, переданных контроллером, системой управления и/или другим элементом буровой установки и связанным устройством.
После этого в ходе операции 744, бурение продолжают с уменьшенной нагрузкой на долото в течение заданного интервала бурения -ΔWOB. Интервал -ΔWOB может представлять собой заданный период времени, например пять минут, десять минут, тридцать минут или некоторой другой продолжительности. В альтернативе интервал -ΔWOB может являться заданной глубиной проходки при бурении. Например, операция 744 может включать продолжение процесса бурения с уменьшенной нагрузкой на долото до тех пор, пока существующий ствол скважины не будет углублен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Интервал -ΔWOB может также включать и временную, и глубинную составляющие. Например, интервал -ΔWOB может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет углублен на десять футов. В другом примере интервал -ΔWOB может включать бурение до тех пор, пока ствол скважины не будет углублен на двадцать футов, но не более чем в течение девяноста минут. Конечно, вышеописанные значения времени и глубины для интервала -ΔWOB являются лишь примерами, и многие другие значения также включены в объем настоящего описания.
После продолжения процесса бурения в течение интервала -ΔWOB с уменьшенной WOB выполняют операцию 746 с целью определения значения ΔT-ΔWOB, полученного в результате работы с уменьшенной нагрузкой на долото в течение интервала -ΔWOB. В следующей операции решения 748 уменьшают ΔT-ΔWOB, сравнивают с базовым ΔTBL-WOB. Если уменьшенный ΔT-ΔWOB является предпочтительным по сравнению с ΔTBL-WOB, способ 700c продолжают до операции 752. А если уменьшенный ΔT-ΔWOB не является предпочтительным по сравнению с ΔTBL-WOB, способ 700c продолжают до операции 750, в которой нагрузку на долото восстанавливают до его значения перед тем, как была выполнена операция 742, и затем способ продолжают 752.
Определение, сделанное в ходе операции решения 748, может быть выполнено вручную или автоматически, контроллером, системой управления и/или другим элементом буровой установки и связанным устройством. Определение может включать определение значения ΔT-ΔWOB как предпочтительное, если оно меньше и/или по существу равно ΔTBL-WOB. Впрочем, дополнительные или альтернативные факторы могут также играть роль в определении, выполняемом в ходе операции 748.
В ходе операции 752 способа 700c определяют базовое ΔT для оптимизации на основе ΔT путем увеличения нагрузки на долото. Поскольку базовое ΔT, определенное в операции 752, используется для оптимизации путем увеличения нагрузки на долото, в настоящем описании используется обозначение ΔTBL+WOB.
В следующей операции 754 увеличивают нагрузку на долото. Увеличение нагрузки на долото в ходе операции 754 может происходить в пределах определенных заданных предельных значений нагрузки на долото. Например, увеличение нагрузки на долото может составлять не более чем приблизительно 10%. Впрочем, другие проценты также включены в объем настоящего описания, где такие проценты находятся в пределах или вне заданных пределов нагрузки на долото. Нагрузка на долото может быть увеличена вручную, посредством ввода оператора, или нагрузка на долото может быть увеличена автоматически, посредством сигналов, переданных контроллером, системой управления и/или другим элементом буровой установки и связанным устройством.
После этого в ходе операции 756 бурение продолжают с увеличенной нагрузкой на долото в течение заданного интервала бурения +ΔWOB. Интервал +ΔWOB может представлять собой заданный период времени, например пять минут, десять минут, тридцать минут или некоторой другой продолжительности. В альтернативе интервал +ΔWOB может являться заданной глубиной проходки при бурении. Например, операция 756 может включать продолжение процесса бурения с увеличенной нагрузкой на долото до тех пор, пока существующий ствол скважины не будет углублен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Интервал +ΔWOB может также включать и временную, и глубинную составляющие. Например, интервал +ΔWOB может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет углублен на десять футов. В другом примере интервал +ΔWOB может включать бурение до тех пор, пока ствол скважины не будет углублен на двадцать футов, но не более чем в течение девяноста минут.
После продолжения процесса бурения в течение интервала +ΔWOB с увеличенной нагрузкой на долото, выполняют операцию 758 с целью определения ΔT+ΔWOB, полученного в результате работы с увеличенной нагрузкой на долото в течение интервала +ΔWOB. В следующей операции решения 760 измененный ΔT+ΔWOB сравнивают с базовым ΔTBL+WOB. Если измененный ΔT+ΔWOB является предпочтительным по сравнению с ΔTBL+WOB, способ 700c продолжают до операции 764. А если измененный ΔT+ΔWOB не является предпочтительным по сравнению с ΔTBL+WOB, способ 700c продолжают до операции 762, в которой нагрузку на долото восстанавливают до его значения перед тем, как была выполнена операция 754, и затем способ продолжают до операции 764.
Определение, сделанное в ходе операции решения 760, может быть выполнено вручную или автоматически, контроллером, системой управления и/или другим элементом буровой установки и связанным устройством. Определение может включать определение значения ΔT+ΔWOB как предпочтительное, если оно меньше и/или по существу равно ΔTRL+WOB. Впрочем, дополнительные или альтернативные факторы могут также играть роль в определении, выполняемом в ходе операции 760.
В ходе операции 764 способа 700c определяют базовое ΔT для оптимизации на основе ΔT путем уменьшения частоты вращения долота. Поскольку базовое ΔT, определенное в операции 764, используется для оптимизации путем уменьшения частоты вращения бурового долота, в настоящем описании используется обозначение ΔTBL-RPM.
В следующей операции 766 уменьшают частоту вращения бурового долота. Уменьшение частоты вращения бурового долота в ходе операции 766 может происходить в пределах определенных заданных предельных значений частоты вращения бурового долота. Например, уменьшение частоты вращения бурового долота может составлять не более чем приблизительно 10%. Впрочем, другие проценты также включены в объем настоящего описания, где такие проценты находятся в пределах или вне заданных пределов частоты вращения бурового долота. Частота вращения бурового долота может быть уменьшена вручную, посредством ввода оператора, или частота вращения бурового долота может быть уменьшена автоматически, посредством сигналов, переданных контроллером, системой управления и/или другим элементом буровой установки и связанным устройством.
После этого в ходе операции 768 бурение продолжают с уменьшенной частотой вращения бурового долота в течение заданного интервала бурения -ΔRPM. Интервал -ΔRPM может представлять собой заданный период времени, например пять минут, десять минут, тридцать минут или некоторой другой продолжительности. В альтернативе интервал -ΔRPM может являться заданной глубиной проходки при бурении. Например, операция 768 может включать продолжение процесса бурения с уменьшенной частотой вращения бурового долота до тех пор, пока существующий ствол скважины не будет углублен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Интервал -ΔRPM может также включать и временную, и глубинную составляющие. Например, интервал -ΔRPM может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины не будет углублен на десять футов. В другом примере интервал -ΔRPM может включать бурение до тех пор, пока ствол скважины не будет углублен на двадцать футов, но более чем в течение девяноста минут.
После продолжения процесса бурения в течение интервала -ΔRPM с уменьшенной частотой вращения бурового долота выполняют операцию 770 с целью определения значения ΔT-ΔRPM, полученного в результате работы с уменьшенной частотой вращения бурового долота в течение интервала -ΔRPM. В следующей операции решения 772 уменьшенный ΔT-ΔRPM сравнивают с базовым ΔTBL-RPM. Если измененный ΔT-ΔRPM является предпочтительным по сравнению с ΔTBL-RPM, способ 700c продолжают до операции 776. А если измененный ΔT-ΔRPM не является предпочтительным по сравнению с ΔTBL-RPM, способ 700c продолжают до операции 774, в которой частоту вращения бурового долота восстанавливают до ее значения перед тем, как была выполнена операция 766, и затем способ продолжают до операции 776.
Определение, сделанное в ходе операции решения 772, может быть выполнено вручную или автоматически, контроллером, системой управления и/или другим элементом буровой установки и связанным устройством. Определение может включать определение значения ΔT-ΔRPM как предпочтительного, если оно меньше и/или по существу равно ΔTBL-RPM. Впрочем, дополнительные или альтернативные факторы могут также играть роль в определении, выполняемом в ходе операции 772.
В ходе операции 776 способа 700c определяют базовое ΔT для оптимизации на основе ΔT путем увеличения частоты вращения долота. Поскольку базовое ΔT, определенное в операции 776, используется для оптимизации путем увеличения частоты вращения бурового долота, в настоящем описании используется обозначение ΔTBL+RPM.
В следующей операции 778 увеличивают частоту вращения бурового долота. Увеличение частоты вращения бурового долота в ходе операции 778 может происходить в пределах определенных заданных предельных значений частоты вращения бурового долота. Например, увеличение частоты вращения бурового долота может составлять не более чем приблизительно 10%. Впрочем, другие проценты также включены в объем настоящего описания, где такие проценты находятся в пределах или вне заданных пределов частоты вращения бурового долота. Частота вращения бурового долота может быть увеличена вручную, посредством ввода оператора, или частота вращения бурового долота может быть увеличена автоматически, посредством сигналов, переданных контроллером, системой управления и/или другим элементом буровой установки и связанным устройством.
После этого, в ходе операции 780, бурение продолжают с увеличенной частотой вращения бурового долота в течение заданного интервала бурения +ΔRPM. Интервал +ΔRPM может представлять собой заданный период времени, например пять минут, десять минут, тридцать минут или некоторой другой продолжительности. В альтернативе интервал +ΔRPM может являться заданной глубиной проходки при бурении. Например, операция 780 может включать продолжение процесса бурения с увеличенной частотой вращения бурового долота до тех пор, пока существующий ствол скважины не будет углублен на пять футов, десять футов, пятьдесят футов или на некоторую другую глубину. Интервал +ΔRPM может также включать и временную, и глубинную составляющие. Например, интервал +ΔRPM может включать бурение в течение, по меньшей мере, тридцати минут или до тех пор, пока ствол скважины будет углублен на десять футов. В другом примере интервал +ΔRPM может включать бурение до тех пор, пока ствол скважины не будет углублен на двадцать футов, но не более чем в течение девяноста минут.
После продолжения процесса бурения в течение интервала +ΔRPM с увеличенной частотой вращения бурового долота выполняют операцию 782 с целью определения ΔT+ΔRPM, полученного в результате работы с увеличенной частотой вращения бурового долота в течение интервала +ΔRPM. В следующей операции решения 784 увеличенное ΔT+ΔRPM сравнивают с базовым ΔTBL+RPM. Если измененный ΔT+ΔRPM является предпочтительным по сравнению с ΔTBL+RPM, способ 700c продолжают до операции 788. А если измененное ΔT+ΔRPM не является предпочтительным по сравнению с ΔTBL+RPM, способ 700c продолжают до операции 786, в которой частоту вращения бурового долота восстанавливают до его значения перед тем, как была выполнена операция 778, и затем способ продолжают до операции 788.
Определение, сделанное в ходе операции решения 784, может быть выполнено вручную или автоматически, контроллером, системой управления и/или другим элементом буровой установки и связанным устройством. Определение может включать определение значения ΔT+ΔRPM как предпочтительного, если оно меньше и/или по существу равно ΔTBL+RPM. Впрочем, дополнительные или альтернативные факторы могут также играть роль в определении, выполняемом в ходе операции 784.
Операция 788 включает ожидание в течение заданного периода времени или бурения до заданного интервала глубины перед повтором способа 700c с возвратом к операции 740. При этом в примере осуществления интервал может составлять всего 0 секунд или 0 футов, а способ возвращают к операции 740 по существу немедленно после выполнения операций 784 и/или 786. В альтернативе способ 700c может не потребовать итерации, при этом способ 700c может по существу заканчиваться после выполнения операций 784 и/или 786.
Кроме того, интервалы бурения -ΔWOB, +ΔWOB, -ΔRPM и +ΔROM могут быть по существу идентичными в пределах одной итерации способа 700c. В альтернативе один или более интервалов могут варьироваться по продолжительности или глубине относительно других интервалов. Точно так же величина, на которую нагрузка на долото уменьшается и увеличивается в операциях 742 и 754, может являться по существу идентичной или может варьироваться по отношению друг к другу в пределах одной итерации способа 700c. Величина, на которую частота вращения бурового долота уменьшается и увеличивается в операциях 766 и 778, может являться по существу идентичной или может варьироваться по отношению друг к другу в пределах одной итерации способа 700c. Изменения нагрузки на долото и частоты вращения бурового долота могут также изменяться или оставаться теми же относительно последующих итераций способа 700c.
На фиг. 8A показано схематическое изображение устройства 800 согласно одному или более аспектам настоящего описания. Устройство 800 может включать или составлять, по меньшей мере, часть устройства 100, показанного на фиг. 1, устройства 300, показанного на фиг. 3, устройства 400a, показанного на фиг. 4A, устройства 400b, показанного на фиг. 4B, устройства 400c, показанного на фиг. 4C, и/или устройства 690, показанного на фиг. 6B. Устройство 800 представляет собой пример осуществления, в котором один или более способов в рамках настоящего описания могут быть выполнены или иным путем осуществлены, включая способ 200a, показанный на фиг. 2A, способ 200b, показанный на фиг. 2B, способ 500, показанный на фиг. 5A, способ 600a, показанный на фиг. 6A, способ 600b, показанный на фиг. 6C, способ 600c, показанный на фиг. 6D, способ 700a, показанный на фиг. 7A, способ 700b, показанный на фиг. 7B, и/или способ 700c, показанный на фиг. 7C.
Устройство 800 включает множество ручных или автоматизированных вводов данных, которые в совокупности именуются в настоящем описании как вводы 802. Устройство также включает множество контроллеров, вычислительных устройств, датчиков и других процессоров, в совокупности именуемых в настоящем описании как процессоры 804. Данные от различных вводов 802 передаются различным процессорам 804, как показано на фиг. 8A стрелкой 803. Устройство 800 также включает множество датчиков, кодовых датчиков положения, механизмов управления, приводов, двигателей и других сенсорных, измерительных и приводных устройств, в совокупности именуемых в настоящем описании как устройства 808. Различные данные и сигналы, в совокупности именуемые в настоящем описании как данные 806, передаются между различными процессорами 804 и различными устройствами 808, как показано на фиг. 8A стрелками 805.
Устройство 800 может также включать, быть связано с, или связано иным путем, с дисплеем 810, который может управляться или получать данные иным путем от одного или нескольких процессоров 804, если также не от других элементов устройства 800. Дисплей 810 может также именоваться в настоящем описании как операторский интерфейс, который может дополнительно включать один или более вводов 802 и/или процессоров 804.
В примере осуществления, показанном на фиг. 8A, вводы 802 включают приспособления для введения следующих заданных значений, предельных значений, диапазонов и других данных:
ввод 802a забойного давления;
ввод 802b контрольного положения штуцера;
ввод 802c предельного значения перепада давления;
ввод 802d контрольного значения перепада давления;
ввод 802e предельного натяжения троса буровой лебедки;
ввод 802f предельного значения удельной механической энергии;
ввод 802g целевого значения удельной механической энергии;
ввод 802h заданного значения расхода бурового раствора;
ввод 802i номинального значения давления насоса;
ввод 802j отрицательной амплитуды вала;
ввод 802k положительной амплитуды вала;
ввод 802l заданного значения скорости проходки;
ввод 802m насоса;
ввод 802n положения торца долота;
ввод 802o частоты вращения бурового долота верхнего привода;
ввод 802p предельного крутящего момента верхнего привода;
ввод 802q контрольного значения нагрузки на долото; и
ввод 802r номинального значения нагрузки на долото.
Впрочем, вводы 802 могут включать приспособления для введения дополнительных или альтернативных заданных значений, предельных значений, диапазонов и других данных в рамках настоящего описания.
Ввод 802a забойного давления может указывать значение максимального требуемого давления газообразной и/или другой среды в нижнем конце ствола скважины. В альтернативе ввод 802a забойного давления может указывать диапазон, в пределах которого желательно поддерживается давление в забое ствола скважины. Такое давление может быть выражено как абсолютное давление или манометрическое давление (например, относительно атмосферного давления или какого-либо другого заданного давления).
Ввод 802b контрольного положения штуцера может являться заданной точкой или значением, которое указывает желательное положение штуцера. В альтернативе ввод 802b контрольного положения штуцера может указывать диапазон, в пределах которого желательно поддерживается положение дроссельной катушки. Штуцер может представлять собой устройство, имеющее проходное отверстие или другие средства, которые позволяют регулировать расход текучей среды и/или давление. Штуцер может быть установлен на конце штуцерной линии, которая является трубой высокого давления, идущей от выпускного отверстия на блоке противовыбросового превентора, через который жидкость под давлением в стволе скважины может течь из скважины через штуцерную линию к штуцеру, понижая, таким образом, давление текучей среды (например, до атмосферного давления). Ввод 802b контрольного положения штуцера может являться двойным индикатором, отражающим положение штуцера как "открытое" или "закрытое". В альтернативе ввод 802b контрольного положения штуцера может быть указан в процентах, указывающих степень, на которую штуцер частично открыт или закрыт.
Ввод 802c предельного значения перепада давления может являться значением, указывающим максимальный или минимальный перепад давления в гидравлическом забойном двигателе. В альтернативе ввод 802c предельного значения перепада давления может указывать диапазон, в пределах которого желательно поддерживается перепад давления в гидравлическом забойном двигателе. Ввод контрольного значения перепада давления 802d может являться заданной точкой или значением, указывающим требуемый перепад давления в гидравлическом забойном двигателе. В примере осуществления ввод 802c предельного значения перепада давления является значением, указывающим максимальный требуемый перепад давления в гидравлическом забойном двигателе, а ввод 802 контрольного значения перепада давления контрольного значения является значением, указывающим номинальный требуемый перепад давления в гидравлическом забойном двигателе.
Ввод 802e предельного натяжения троса буровой лебедки может являться значением, указывающим максимальное усилие, приложенное к буровой лебедке буровым тросом (например, при поддерживании бурильной колонны над забоем или при подъеме оборудования, установленного в стволе скважины). Например, ввод предельного натяжения троса буровой лебедки 802e может указывать максимальную нагрузку на крюк, которая должна поддерживаться буровой лебедкой в ходе работы. Ввод предельного натяжения троса буровой лебедки 802e может быть выражен как максимальный вес или натяжение бурового троса, которое может выдержать буровая лебедка без повреждения буровой лебедки, бурового троса и/или другого оборудования.
Ввод 802f предельного значения удельной механической энергии может являться значением, указывающим максимальную или минимальную удельную механическую энергию, требуемую в ходе бурения. В альтернативе ввод 802f предельного значения удельной механической энергии может являться диапазоном, в пределах которого удельная механическая энергия желательно поддерживается в ходе бурения. Как описано выше, фактическое значение удельной механической энергии, по меньшей мере, частично зависит от нагрузки на долото, диаметра долота, скорости вращения бурового долота, крутящего момента бурильной колонны и скорости проходки, каждое из которых может регулироваться согласно аспектам настоящего описания с поддерживанием желательной удельной механической энергии. Ввод 802g целевого значения удельной механической энергии может являться значением, указывающим требуемую удельную механическую энергию, или диапазоном, в пределах которого удельная механическая энергия желательно поддерживается в ходе бурения. В примере осуществления ввод 802f предельного значения удельной механической энергии является значением или диапазоном, указывающим максимальную и/или минимальную удельную механическую энергию, а ввод 802g целевого значения удельной механической энергии - значением, указывающим требуемую номинальную удельную механическую энергию.
Ввод заданного значения расхода бурового раствора 802h может являться значением, указывающим максимальный, минимальный или номинальный требуемый расход бурового раствора на выпуске бурового насоса. В альтернативе ввод заданного значения расхода бурового раствора 802h может являться диапазоном, в пределах которого желательно поддерживается расход бурового раствора. Ввод 802i номинального давления насоса может являться значением, указывающим текущее, требуемое, начальное, измеренное или другое номинальное давление бурового насоса. Номинальное давление бурового насоса обычно является разностью между давлением бурового раствора и давлением в кольцевом пространстве или в стволе скважины, когда бурильная колонна удерживается над забоем.
Ввод 802j отрицательной амплитуды вала может являться значением, указывающим максимальное требуемое вращение вала из нейтральной точки колебания вала в первом угловом направлении, тогда как ввод 802k положительной амплитуды вала может являться значением, указывающим максимальное требуемое вращение вала из нейтральной точки колебания вала в противоположном угловом направлении. Например, в ходе работы верхнего привода, который вызывает колебание вала, ввод 802j отрицательной амплитуды вала может указывать максимальное требуемое вращение вала по часовой стрелке в направлении нейтральной точки колебания, а ввод 802k положительной амплитуды вала может указывать максимальное требуемое вращение вала против часовой стрелки в направлении нейтральной точки колебания.
Ввод 802l заданного значения скорости проходки может являться значением, указывающим максимальную, минимальную или номинальную требуемую скорость проходки. В альтернативе ввод заданного значения скорости проходки 802l может являться диапазоном, в пределах которого желательно поддерживается скорость проходки.
Ввод 802m насоса может являться значением, указывающим максимальный, минимальный или номинальный требуемый расход, мощность, скорость (например, число ходов в минуту) и/или другой рабочий параметр, связанный с работой бурового насоса. Например, буровой насос фактически может включать больше одного насоса, при этом ввод 802m насоса может указывать требуемое максимальное или номинальное общее давление, расход или другие параметры на выпуске нескольких буровых насосов, или же насосная система работает совместно с несколькими буровыми насосами.
Ввод 802n положения торца долота может являться значением, указывающим требуемую ориентацию торца долота. В альтернативе ввод 802n положения торца долота может являться диапазоном, в пределах которого желательно поддерживается торец долота. Ввод 802n положения торца долота может быть выражен как один или несколько углов относительно неподвижной или заданной координатной точки. Например, ввод 802n положения торца долота может представлять требуемую ориентацию торца долота по азимуту относительно географического севера и/или требуемый наклон торца долота относительно вертикали. Как описано выше, в некоторых вариантах осуществления его вводят напрямую, или он может быть основан на заданной траектории бурения. В процессе бурения с использованием способа на фиг. 5A ориентация торца долота может быть рассчитана на основе других данных, таких как данные инклинометрии или данные по направлению и величина отклонения от заданной траектории бурения. Это может являться значением, которое оценивают для направления ОНБК по измененной траектории бурения.
Ввод 802o скорости вращения верхнего привода может являться значением, указывающим максимальную, минимальную или номинальную требуемую частоту вращения верхнего привода. В альтернативе ввод 802o может являться диапазоном, в пределах которого желательно поддерживается частота вращения верхнего привода. Ввод 802p предельного крутящего момента верхнего привода может являться значением, указывающим максимальный крутящий момент, развиваемый верхним приводом.
Ввод 802q контрольного значения нагрузки на долото может являться значением, указывающим максимальную, минимальную или номинальную требуемую нагрузку на долото, возникающую в результате действия веса бурильной колонны на буровое долото, хотя также могут учитываться другие силы, влияющие на нагрузку на долото, такие как трение между бурильной колонной и стволом скважины. В альтернативе ввод 802q контрольного значения нагрузки на долото может являться диапазоном, в котором желательно поддерживается нагрузка на долото. Ввод 802r номинального значения нагрузки на долото может являться значением, указывающим текущее, требуемое, начальное, измеренное или другое номинальное значение нагрузки на долото, в котором учитывается нагрузка на крюк и вес бурильной колонны, когда последняя удерживается над забоем.
Один или более вводов 802 может включать клавиатуру, устройство идентификации речи, диск, джойстик, мышку, базу данных и/или другое стандартное или перспективное устройство ввода. Один или более вводов 802 может поддерживать ввод данных из локальных и/или удаленных местоположений. Один или больше вводов 802 может включать средства для выбора пользователем заданных контрольных точек, значений или диапазонов, например, с помощью одного или нескольких выпадающих меню. Один или более вводов 802, дополнительно или альтернативно, может обеспечивать автоматизированное введение посредством одного или более процессоров 804, например, путем выполнения одной или более процедур поиска в базе данных. Один или более вводов 802, возможно в соединении с другими элементами устройства 800, может поддерживать работу и/или контроль со станций на буровой площадке, а также из одного или более удаленных местоположений. Каждый из вводов 802 может иметь индивидуальные приспособления для ввода, хотя два или более из вводов 802 могут вместе иметь одно приспособление для ввода. Один или более вводов 802 может позволять ввод оператору, хотя один или больше вводов 802 альтернативно может обеспечивать автоматический ввод данных компьютером, программным обеспечением, модулем, подпрограммой, путем поиска в базе данных, алгоритмом, вычислением и/или иным путем. Один или более вводов 802 может служить для такого автоматического ввода данных, но с переопределенной функцией, посредством которой человек-оператор может одобрить или скорректировать автоматически введенные данные.
В примере осуществления, показанном на фиг. 8A, устройства 808 включают следующие элементы:
датчик 808a положения блока;
датчик 808b давления в кольцевом пространстве;
датчик 808c положения штуцера;
датчик 808d нагрузки на крепление неподвижного конца троса;
кодовый датчик 808e положения буровой лебедки;
датчик 808f давления бурового раствора;
гравитационный датчик 808g ИПБ торца долота;
магнитный датчик 808h ИПБ торца долота;
датчик 808i расхода возвратной линии;
датчик 808j веса бурового раствора в возвратной линии;
кодовый датчик 808k положения верхнего привода;
датчик 808l крутящего момента верхнего привода;
привод 808m штуцера;
привод 808n буровой лебедки;
двигатель 808o буровой лебедки;
привод 808p бурового насоса;
привод 808q верхнего привода; и
двигатель 808r верхнего привода.
Впрочем, устройства 808 могут включать дополнительные или альтернативные устройства в рамках настоящего описания. Устройства 808 предназначены для работы во взаимодействии с соответствующими буровой лебедкой, штуцером, буровым насосом, верхним приводом, блоком, бурильной колонной и/или другими элементами буровой установки. В альтернативе устройства 808 также включают один или более других элементов буровой установки из указанных.
Датчик 808a положения блока может представлять собой или включать оптический датчик, радиодатчик, оптический или другой кодовый датчик положения или датчик другого типа, предназначенный для детектирования относительного или абсолютного вертикального положения блока. Датчик положения блока 808a может быть соединен, или может представлять собой единое целое, с блоком, кронблоком, буровой лебедкой и/или другим элементом устройства 800 или буровой установки.
Датчик 808b давления в кольцевом пространстве предназначен для детектирования давления в кольцевом пространстве, определенном между бурильной колонной и обсадной трубой или стволом скважины, и может представлять собой или включать один или более преобразователей, тензометров и/или других устройств для детектирования изменений давления или детектирования давления иным образом. Датчик 808b давления в кольцевом пространстве может быть присоединен к обсадной трубе, бурильной колонне и/или другому элементу устройства 800 или буровой установки, и может быть установлен на или вблизи поверхности ствола скважины, немного ниже поверхности или значительно глубже в стволе скважины.
Датчик 808c положения штуцера предназначен для определения того, открыт ли штуцер, или закрыт, и может также служить для определения степени, на которую штуцер частично открыт или закрыт. Датчик 808c положения штуцера может быть соединен, или может представлять собой единое целое, со штуцером, приводом штуцера и/или другим элементом устройства 800 или буровой установки. Штуцер может альтернативно поддерживать установленное давление или стабилизировать массовый расход, например, в зависимости от давления в кольцевом пространстве. Это может быть измерено с помощью дополнительного массового расходомера 808s.
Датчик 808d нагрузки на крепление неподвижного конца предназначен для определения натяжения бурового троса на или вблизи крепления неподвижного конца. Он может включать один или более преобразователей, тензометров и/или других датчиков, присоединенных к буровому тросу.
Кодовый датчик 808e положения буровой лебедки предназначен для определения углового положения шкивов буровой лебедки, на которые опирается буровой трос. Он может включать один или более оптических кодовых датчиков положения, интерферометров и/или других датчиков, предназначенных для определения углового положения шкива и/или любого изменения углового положения шкива. Кодовый датчик 808e положения буровой лебедки может включать один или более элементов, соединенных, или представляющих единое целое, со шкивом и/или стационарной частью буровой лебедки.
Датчик 808f давления бурового раствора предназначен для измерения давления рабочей жидкости на выходе из забойного двигателя и может представлять собой или включать один или несколько преобразователей, тензометров и/или других устройств для определения давления жидкости. Он может быть соединен, или может представлять собой единое целое, с буровым насосом и, таким образом, размещен на поверхности или вблизи устья скважины.
Гравитационный датчик 808g ИПБ торца долота предназначен для определения ориентации торца долота на основе гравитации. Магнитный датчик 808h ИПБ торца долота предназначен для определения ориентации торца долота на основе магнитного поля. Указанные датчики 808g и 808h могут быть соединены, или могут представлять собой единое целое, с узлом ИПБ и, таким образом, размещены в скважине.
Датчик 808i потока возвратной линии предназначен для определения расхода бурового раствора в возвратной линии, который может быть выражен в галлон/мин. Датчик веса бурового раствора в возвратной линии 808j предназначен для измерения веса бурового раствора, текущего по возвратной линии. Указанные датчики 808i и 808j могут быть соединены с возвратной линией и, таким образом, могут быть размещены на поверхности или вблизи устья скважины.
Кодовый датчик 808k положения верхнего привода предназначен для определения углового положения вала. Он может включать один или более оптических кодовых датчиков положения, интерферометров и/или других датчиков, предназначенных для определения углового положения вала и/или любого изменения углового положения вала относительно верхнего привода, географического севера или некоторой другой неподвижной координатной точки. Датчик 808l крутящего момента верхнего привода предназначен для измерения крутящего момента, приложенного верхним двигателем, или крутящего момента, необходимого для вращения вала или бурильной колонны с текущей скоростью. Указанные датчики 808k и 808l могут быть соединены, или могут представлять собой единое целое, с верхним приводом.
Привод 808m штуцера предназначен для приведения в действие штуцера для переведения штуцера в открытое, закрытое положение и/или одно или более положений между полностью открытым и полностью закрытым положением. Привод штуцера может являться гидравлическим, пневматическим, механическим, электрическим или комбинацией перечисленного.
Привод 808n буровой лебедки предназначен для подачи электрического сигнала двигателю 808o буровой лебедки для приведения ее в действие. Привод 808o буровой лебедки предназначен для вращения шкива, на который опирается буровой трос, подаваемый или сматываемый таким образом.
Привод 808p бурового насоса предназначен для подачи электрического сигнала буровому насосу и регулирования, таким образом, расхода и/или давления бурового насоса на выходе. Привод 808q верхнего привода предназначен для подачи электрического сигнала двигателю верхнего привода 808r для приведения его в действие. Двигатель верхнего привода 808r предназначен для вращения вала и вращения, таким образом, бурильной колонны, соединенной с валом.
В примере осуществления, показанном на фиг. 8A, данные 806, передаваемые между устройствами 808 и процессорами 804, включают следующее:
положение 806a блока;
давление 806b в кольцевом пространстве;
положение 806c штуцера;
нагрузка 806d на крюк;
давление 806e бурового раствора;
ход/фаза 806f бурового насоса;
вес 806g бурового раствора;
положение 806h вала;
возвратный поток 806i;
торец 806j долота;
крутящий момент 806k верхнего привода;
сигнал 806l включения штуцера;
сигнал 806m включения буровой лебедки;
сигнал 806n включения бурового насоса;
сигнал 806o включения верхнего привода; и
сигнал 806p ограничения крутящего момента верхнего привода.
Впрочем, данные 806, передаваемые между устройствами 808 и процессорами 804, могут включать дополнительные или альтернативные данные в рамках настоящего описания.
В примере осуществления, показанном на фиг. 8A, процессоры 804 включают следующие элементы:
контроллер 804a штуцера;
контроллер 804b барабана;
контроллер 804c бурового насоса;
контроллер 804d колебания;
контроллер 804e положения вала;
контроллер 804f торца долота;
устройство 804g для вычисления d-экспоненты;
устройство 804h для вычисления скорректированной d-экспоненты;
устройство 804i для вычисления удельной механической энергии;
устройство 804l для вычисления скорости проходки;
устройство 804m для вычисления фактической глубины;
устройство 804n для вычисления нагрузки на долото;
датчик 804o заклинивания/проскальзывания; и
диаграмма 804p результатов замеров инклинометрии.
Впрочем, процессоры 804 могут включать дополнительные или альтернативные контроллеры, устройства для вычисления, датчики, накопители данных и/или другие процессоры в рамках настоящего описания.
Контроллер 804a штуцера предназначен для получения забойного давления, установленного вводом 802a забойного давления, давления 806b в кольцевом пространстве от датчика 808b давления в кольцевом пространстве, положения штуцера 806c от датчика 808c положения штуцера, а также веса 806g бурового раствора от датчика веса бурового раствора в возвратной линии 808j. Контроллер 804a штуцера может также получать данные забойного давления от устройства 804k для вычисления давления. В альтернативе процессоры 804 могут включать устройство сравнения, суммирующее или другое устройство, выполняющее алгоритм, в котором используются установочные параметры забойного давления, полученные из ввода 802a забойного давления, и текущее забойное давление, полученное от устройства 804k для вычисления давления, при этом результат подобного алгоритма поступает в контроллер 804a штуцера вместо или в дополнение к установочным параметрам забойного давления и/или текущему давлению забоя. Контроллер 804a штуцера предназначен для обработки полученных данных и генерации сигнала включения штуцера 806l, который затем передается приводу 808 штуцера.
Например, если текущее забойное давление превышает установленное забойное давление, то сигнал включения штуцера 806l может указывать, чтобы привод штуцера 808m больше открывал штуцер, увеличивая, таким образом, возвратный поток и уменьшая текущее забойное давление. Аналогичным образом, если текущее забойное давление меньше, чем установленное забойное давление, то тогда сигнал включения штуцера 806l может указывать, чтобы привод 808m
штуцера больше закрывал штуцер, уменьшая, таким образом, возвратный поток и увеличивая текущее забойное давление. Включение привода 808m штуцера может выполняться пошагово, при этом сигнал 806l включения штуцера неоднократно указывает, чтобы привод 808m штуцера открывался или закрывался на заданную величину, пока текущее забойное давление не будет соответствовать установленным параметрам забойного давления. В альтернативе сигнал 806l включения штуцера может указывать, чтобы привод 808m штуцера открывался или закрывался на величину, пропорциональную текущей разности между текущим забойным давлением и установленным забойным давлением.
Контроллер 804b барабана предназначен для получения заданного значения скорости проходки из ввода 802l заданного значения скорости проходки, а также текущей скорости проходки от устройства 804l для вычисления скорости проходки. Контроллер 804b барабана также предназначен для получения данных нагрузки на долото от устройства сравнения, суммирующего или другого устройства, выполняющего алгоритм, в котором используется контрольное значение нагрузки на долото из ввода 802g контрольного значения нагрузки на долото и текущая нагрузка на долото от устройства 804n для вычисления нагрузки на долото. Указанные данные нагрузки на долото могут быть изменены на основе текущих данных удельной механической энергии. В альтернативе контроллер 804b барабана предназначен для получения контрольного значения нагрузки на долото из ввода 802g контрольного значения нагрузки на долото и текущего значения нагрузки на долото от устройства 804n для вычисления нагрузки на долото непосредственно, а затем выполнения сравнения нагрузки на долото или суммирующего алгоритма непосредственно. Контроллер 804b барабана также предназначен для получения данных перепада давления от устройства сравнения, суммирующего или другого устройства, выполняющего алгоритм, в котором используется контрольное значение перепада давления, полученное из ввода 802d контрольного значения перепада давления и текущего значения перепада давления, полученного от одного из процессоров 804, который предназначен для определения текущего значения перепада давления. Текущее значение перепада давления может быть скорректировано с учетом давления 806b в кольцевом пространстве.
Контроллер 804b барабана предназначен для обработки полученных данных и для генерации сигнала 806m включения буровой лебедки, который затем передается приводу 808n буровой лебедки. Например, если текущее значение нагрузки на долото, полученное от устройства 804n для вычисления нагрузки на долото меньше, чем контрольное значение нагрузки на долото, полученной из ввода 802q контрольного значения нагрузки на долото, то сигнал 806m включения буровой лебедки может указывать приводу буровой лебедки 808n, чтобы он управлял двигателем буровой лебедки, который в свою очередь подает буровой трос. Если текущее значение нагрузки на долото меньше, чем контрольное значение нагрузки на долото, то сигнал включения буровой лебедки 806m может указывать приводу буровой лебедки 808n, чтобы он управлял двигателем буровой лебедки 808o, который в свою очередь сматывает буровой трос.
Если текущее значение скорости проходки, полученное от устройства 804l для вычисления скорости проходки меньше, чем заданное значение скорости проходки, полученное из ввода 802l заданного значения скорости проходки, то сигнал включения буровой лебедки 806m может указывать приводу буровой лебедки 808n, чтобы он управлял двигателем буровой лебедки, который в свою очередь подает буровой трос. Если текущее значение скорости проходки превышает заданное значение скорости проходки, то сигнал 806m включения буровой лебедки может указывать приводу буровой лебедки 808n, чтобы он управлял двигателем буровой лебедки 808o, который в свою очередь сматывает буровой трос.
Если текущее значение перепада давления меньше, чем контрольное значение перепада давления, полученное из ввода 802d контрольного значения перепада давления, то сигнал 806m включения буровой лебедки может указывать приводу буровой лебедки 808n, чтобы он управлял двигателем буровой лебедки 808o, который в свою очередь подает буровой трос. Если текущее значение перепада давления превышает контрольное значение перепада давления, то сигнал включения буровой лебедки 806m может указывать приводу 808n буровой лебедки, чтобы он управлял двигателем 808o буровой лебедки, который в свою очередь сматывает буровой трос.
Контроллер 804c бурового насоса предназначен для получения данных хода/фазы 806f бурового насоса, давления 806e бурового раствора от датчика 808f давления бурового раствора, текущего значения перепада давления, текущего значения удельной механической энергии от устройства 804i для вычисления удельной механической энергии, текущего значения скорости проходки от устройства 804l для вычисления скорости проходки, показателя заклинивания/проскальзывания от датчика 804o заклинивания/проскальзывания, заданного расхода бурового раствора из ввода 802h заданного значения расхода бурового раствора, а также данных насоса из ввода 802m насоса. Затем контроллер 804c бурового насоса использует указанные данные, чтобы генерировать сигнал 806n включения бурового насоса, который передается буровому насосу 808p.
Контроллер 804d колебания предназначен для получения текущего положения вала 806h, текущего крутящего момента 806k верхнего привода, показателя заклинивания/проскальзывания от датчика 804o заклинивания/проскальзывания, текущего значения скорости проходки от устройства 804l для вычисления скорости проходки и предельных значений амплитуды колебания вала из вводов 802j и 802k. Затем контроллер 804d колебания использует указанные данные, чтобы генерировать ввод контроллеру 804e положения вала для использования в генерации сигнала 806o включения верхнего привода. Например, если показатель заклинивания/проскальзывания от датчика 804o заклинивания/проскальзывания укажет, что происходит заклинивание/проскальзывание, то тогда сигнал, генерируемый контроллером 804d колебания, указывает, что должно быть начато колебание или увеличена его амплитуда.
Контроллер 804e положения вала предназначен для получения сигнала от контроллера 804d колебания, заданной частоты вращения бурового долота верхнего привода из ввода частоты вращения бурового долота верхнего привода 802o, сигнала от контроллера 804f торца долота, текущего значения нагрузки на долото от устройства 804n для вычисления нагрузки на долото, а также текущего положения 806j торца долота от, по меньшей мере, одного из датчиков 808g и 808h ИПБ торца долота. Контроллер 804e положения вала может также служить для получения заданного значения предельного крутящего момента верхнего привода из ввода 802p предельного крутящего момента верхнего привода, хотя указанное заданное значение может быть скорректировано устройством сравнения, суммирующим или другим устройством с учетом текущего значения удельной механической энергии, где текущее значение удельной механической энергии получено от устройства 804i для вычисления удельной механической энергии. Контроллер 804e положения вала может быть также предназначен для получения показателя заклинивания/проскальзывания от датчика заклинивания/проскальзывания 804o. Затем контроллер 804e положения вала использует указанные данные, чтобы генерировать сигнал включения верхнего привода 806o.
Например, сигнал 806o включения верхнего привода указывает приводу 808q верхнего привода, чтобы он управлял двигателем 808r верхнего привода, который в свою очередь вращает вал на скорости, указанной вводом 802o скорости вращения верхнего привода. Однако это может произойти только тогда, когда другие вводы не отменяют данную задачу. Например, если сигнал включения верхнего привода 806o направлен сигналом от контроллера 804d колебания, то он также указывает приводу 808q верхнего привода, чтобы он управлял двигателем 808r верхнего привода, который вращает вал с колебанием. Кроме того, сигнал от контроллера 804d торца долота может отменять или иным образом влиять на сигнал 806o включения верхнего привода, вращательно ориентируя вал в определенном статическом положении или устанавливая нейтральную точку колебания.
Контроллер 804f торца долота предназначен для получения положения торца долота, установленную вводом 802n положения торца долота, а также текущего положения 806j торца долота, по меньшей мере, от одного из датчиков 808g ИПБ торца долота и 808h. Контроллер 804f торца долота может также служить для получения данных перепада давления. Затем контроллер 804f торца долота использует указанные данные, чтобы генерировать сигнал, который подается в контроллер 804e положения вала. Устройство 804g для вычисления d-экспоненты предназначено для получения текущего значения скорости проходки от устройства 804l для вычисления скорости проходки, текущего значения перепада давления и/или других данных давления, диаметра долота, текущего значения нагрузки на долото от устройства 804n для вычисления нагрузки на долото, а также текущего веса 806g бурового раствора от датчика 808j веса бурового раствора в возвратной линии. Затем устройство 804g для вычисления d-экспоненты использует указанные данные для вычисления d-экспоненты, которая является фактором оценки скорости проходки и обнаружения или прогноза зон аномального порового давления. Принятие всех других параметров постоянно, при этом d-экспонента должна увеличиваться с глубиной при бурении в пластах с нормальным давлением, тогда как обращение данной динамики служит признаком бурения в пластах с потенциальным аномально высоким давлением. Сигнал от устройства для вычисления d-экспоненты 804g необязательно выводится на дисплей 810, а также подается в вычислительную машину 404 торца долота. Следовательно, модуль 420 управления может остановить бурение или скорректировать заданную траекторию, рассматривая область, вызывающую повышение значения, получаемого от устройства для вычисления d-экспоненты 804g, как отклонение от заданной траектории за пределы зоны допуска. Это предпочтительно может позволить автоматически указать главному контроллеру, чтобы он направил бурение в другом направлении для предотвращения бурения в области с потенциальным аномально высоким давлением. Устройство для вычисления d-экспоненты всего лишь является другим подходящим способом или алгоритмом для анализа скорости проходки, а также является другим вычислением, которое может быть выполнено подобно вычислению удельной механической энергии.
Устройство 804h для вычисления скорректированной d-экспоненты может быть предназначено для получения по существу тех же данных, которые получает устройство 804g для вычисления d-экспоненты. В альтернативе устройство 804h для вычисления скорректированной d-экспоненты предназначено для получения текущей d-экспоненты, вычисляемой устройством 804g для вычисления d-экспоненты. Затем устройство 804h для вычисления скорректированной d-экспоненты использует указанные данные для вычисления скорректированной d-экспоненты, которая исправляет значение d-экспоненты с учетом веса бурового раствора и которая может быть связана непосредственно с давлением пласта, а не дифференциальным давлением. Сигнал от устройства 804g для вычисления d-экспоненты выводится, например, на дисплей 810.
Устройство 804i для вычисления удельной механической энергии предназначено для получения текущих данных частоты вращения бурового долота из ввода 802o скорости вращения верхнего привода, крутящего момента 806k верхнего привода от датчика 808l крутящего момента верхнего привода, а также текущего значения нагрузки на долото от устройства 804n для вычисления нагрузки на долото. Затем устройство для вычисления удельной механической энергии 804i использует указанные данные для вычисления текущего значения удельной механической энергии, которое передается контроллеру 804b барабана, контроллеру положения вала 804e и контроллеру 804c бурового насоса. Устройство 804i для вычисления удельной механической энергии может также служить для получения предельного значения удельной механической энергии, заданного вводом 802f предельного значения удельной механической энергии, при этом 804i устройство для вычисления удельной механической энергии может также служить для сравнения текущего значения удельной механической энергии с заданным предельным значением удельной механической энергии и инициирования предупреждения, если текущее значение удельной механической энергии превышает заданное предельное значение удельной механической энергии. Устройство 804i для вычисления удельной механической энергии может также служить для получения целевого значения удельной механической энергии, заданного вводом 802g целевого значения удельной механической энергии, при этом устройство 804i для вычисления удельной механической энергии может также служить для генерации сигнала, указывающего разность между текущим значением удельной механической энергии и целевым значением удельной механической энергии. Данный сигнал может использоваться одним или несколькими процессорами 804 для корректировки различных значений данных, используемых таким образом, например, для регулирования текущего или контрольного значения нагрузки на долото, используемого контроллером 804b барабана, и/или заданного предельного значения крутящего момента верхнего привода, используемого контроллером 804e положения вала, как описано выше.
Устройство 804k для вычисления давления предназначено для получения давления 806b в кольцевом пространстве от датчика 808b давления в кольцевом пространстве, давления бурового раствора 806e от датчика 808f давления бурового раствора, веса 806g бурового раствора от датчика 808j веса бурового раствора в возвратной линии, а также фактической вертикальной глубины от устройства 804m для вычисления фактической глубины. Затем устройство 804k для вычисления давления используют указанные данные для вычисления текущего забойного давления, которое передается контроллеру 804a штуцера. Однако перед отправкой контроллеру 804a штуцера текущее забойное давление может быть сравнено с заданным значением забойного давления, полученным из ввода 802a забойного давления, при этом контроллер 804a штуцера может использовать только разность между текущим забойным давлением и заданным значением забойного давления при генерации сигнала 806l включения штуцера. Указанное сравнение между текущим забойным давлением и заданным забойным давлением может быть выполнено устройством 804k для вычисления давления, контроллером 804a штуцера или другими процессорами 804.
Устройство 804l для вычисления скорости проходки предназначено для получения положения блока 806a от положения блока 808a с последующим использованием полученных данных для вычисления текущего значения скорости проходки. Затем текущее значение скорости проходки передается в устройство 804m для вычисления фактической глубины, контроллер 804b барабана, контроллер 804c бурового насоса и контроллер 804d колебания.
Устройство 804m для вычисления фактической глубины предназначено для получения текущего положения торца долота 806j, по меньшей мере, от одного из датчиков торца долота 808g и 808h, диаграммы 804p результатов замеров инклинометрии и текущей измеренной глубины, вычисляемой от текущего значения скорости проходки, полученного от устройства 804l для вычисления скорости проходки. Затем устройство 804m для вычисления фактической глубины использует указанные данные для вычисления фактической вертикальной глубины, которая передается в устройство 804k для вычисления давления.
Устройство 804n для вычисления нагрузки на долото предназначено для получения показателя заклинивания/проскальзывания от датчика 804o заклинивания/проскальзывания, а также текущей нагрузки на крюк 806d от датчика 808d нагрузки на крепление неподвижного конца троса. Устройство 804n для вычисления нагрузки на долото может также служить для получения номинального веса колонны, удерживаемой над забоем, который может отличаться от номинальной нагрузки на долото, полученной из ввода 802r номинальной нагрузки на долото, и текущей нагрузки на крюк 806d, полученной от датчика 808d нагрузки на крепление неподвижного конца. В любом случае, устройство 804n для вычисления нагрузки на долото предназначено для вычисления текущей нагрузки на долото на основе текущей нагрузки на крюк, текущего веса колонны и показателя заклинивания/проскальзывания. Затем текущее значение нагрузки на долото передается контроллеру 804e положения вала, устройству 804g для вычисления d-экспоненты, устройству 804h для вычисления скорректированной d-экспоненты, устройству 804i для вычисления удельной механической энергии и контроллеру барабана 804b.
Датчик 804o заклинивания/проскальзывания предназначен для получения текущего крутящего момента 806k верхнего привода и использования полученных данных для генерации показателя заклинивания/проскальзывания, который затем подается в контроллер 804c бурового насоса, контроллер 804d колебания и контроллер 804e положения вала. Датчик 804o заклинивания /проскальзывания измеряет изменения крутящего момента 806k верхнего привода во времени, которые являются показателем того, может ли долото показывать прерывистое движение (заклинивание/проскальзывание), что указывает на то, что крутящий момент верхнего привода и/или нагрузку на долото требуется уменьшить, или необходимо изменить амплитуду колебаний вала.
Процессоры 804 могут быть выполнены вместе как одно устройство обработки или как множество устройств обработки. Каждый процессор 804 может включать одну или более программ или другие программные модули, подмодули, подпрограммы, стандартные подпрограммы, конечные автоматы, алгоритмы. Каждый процессор 804 может дополнительно включать одно или более компьютерных запоминающих устройств или другие средства для хранения цифровых данных. Аспекты одного или более процессоров 804 могут быть по существу аналогичны описанным в настоящей заявке применительно к любому контроллеру или другому устройству обработки данных. Соответственно, процессоры 804 могут включать или состоять, по меньшей мере, из части контроллера 190 на фиг. 1, контроллера 325 на фиг. 3, контроллера 420 на фиг. 4A-C и контроллера 698 на фиг. 6B, например.
На фиг. 8B показан модуль управления системы 812 согласно одному или более аспектам настоящего описания. Модуль 812 управления системы является одним из возможных вариантов исполнения устройства 800, показанного на фиг. 8A, и может применяться во взаимодействии с или может быть размещен в устройстве 100, показанном на фиг. 1, а также в любом из устройств 300, 400a, 400b, 400c и 790, показанных на фиг. 3, 4A-C и 7B соответственно. Модуль 812 управления системы может также применяться для осуществления одного или более аспектов способов, показанных на любой из фиг. 2A, 2B, 5A, 6A, 6C, 7A, 7B и 7C.
Модуль 812 управления системы включает модуль 814 интерфейса, модуль 816 передачи данных и ведущий модуль 818 управления процессом бурения. Модуль 814 включает модуль 814a ручного ввода 814b данных и модуль вывода изображения. Ведущий модуль 818 управления процессом бурения включает модуль 818a данных от датчиков, модуль 818b передачи сигнала управления, модуль 818c управления ОНБК, модуль 420b управления буровой лебедки, модуль 420a управления верхнего привода, модуль 420f управления бурового насоса, модуль 818g оптимизации скорости проходки, модуль 818h оптимизации срока службы долота, модуль 818i оптимизации на основе удельной механической энергии, модуль 818j оптимизации на основе d-экспоненты, модуль 818k оптимизации на основе скорректированной d-экспоненты и модуль 818m оптимизации ОНБК.
Модуль 814a ручного ввода данных предназначен для облегчения ввода пользователем различных контрольных значений, рабочих диапазонов, пластовых условий, параметров оборудования и/или других данных, включающих план бурения или данные для определения плана бурения. Например, модуль 814a ручного ввода данных может обеспечивать вводы 802, показанные на фиг. 8A, среди прочих. Такие данные могут быть получены модулем 814a ручного ввода данных через модуль 816 передачи данных, который может включать или поддерживать один или более соединителей, портов и/или других средств для получения данных от различных устройств для ввода данных. Модуль 814b вывода изображения предназначен для вывода индикации относительно того, что пользователь успешно произвел частичный или полный ввод, чему способствует модуль 814a ручного ввода данных. Такая индикация может включать визуальную индикацию некоторого типа, например, индикацию посредством вывода текста или графических знаков, или другой информации, посредством включения одного или более световых индикаторов или светодиодов, или изменения цвета световых индикаторов, светодиодов, графического знака или символа, среди прочих.
Ведущий модуль 818 управления процессом бурения предназначен для получения ввода данных, выполненного пользователем из модуля 814 интерфейса, который в некоторых вариантах осуществления связан через модуль 816 передачи данных, как в примере осуществления, изображенном на фиг. 8B.
Модуль 818a данных от датчиков ведущего модуля 818 управления процессом бурения также получает сенсорные или измеренные данные от различных датчиков, сенсоров, кодовых датчиков и других подобных устройств, связанных с различным оборудованием и элементами буровой установки. Примеры таких сенсорных и получающих информацию устройств включают устройства 430, показанные на фиг. 4A, и устройств 806 на фиг. 8A, среди прочих фигур, включенных в настоящую заявку. Указанные сенсорные данные могут быть также получены модулем 818a данных от датчиков через модуль 816 передачи данных.
Модуль 718b передачи сигнала управления служит интерфейсом между модулями управления ведущего модуля 818 управления процессом бурения и фактическими рабочими системами. Например, он отправляет и принимает сигналы 130 управления буровой лебедке, верхнему приводу 140, буровому насосу 180 и, в некоторых вариантах осуществления, ОНБК 170 на фиг. 1. Модуль 718c управления ОНБК может использоваться, когда управление ОНБК осуществляется в скважине.
Модуль 420b управления буровой лебедки, модуль 420a управления верхнего привода и модуль 420f управления бурового насоса используются для генерации сигналов управления, посылаемых через модуль 718b передачи сигнала управления буровой лебедке, верхнему приводу и буровому насосу. Они могут соответствовать контроллерам, показанным на фиг. 4C.
В некоторых вариантах осуществления ведущий модуль 818 управления процессом бурения может включать не все показанные модули 818g-m оптимизации, при этом каждый из модулей оптимизации отдельно заказывается пользователем. Соответственно, некоторые варианты осуществления могут включать только один из модулей оптимизации, тогда как другие варианты осуществления включают больше одного модуля оптимизации. Таким образом, ведущий модуль 818 управления процессом бурения может иметь такую конфигурацию, в которой доступные модули взаимодействуют, достигая значений оптимизации с учетом всех модулей оптимизации, доступных в ведущем модуле управления процессом бурения. Это дополнительно обсуждается ниже со ссылкой на фиг. 8C.
Показанный на фиг. 8B модуль 818g оптимизации скорости проходки определяет способы или корректировки процессов, которые улучшают скорость проходки ОНБК. Модуль 818g оптимизации скорости проходки получает данные от модуля 430 данных от датчиков, а также другие данные, включая данные, касающиеся ориентации торца долота, среди прочих, с целью определения наиболее эффективного способа максимизации скорости проходки. После оценки указанных и/или других факторов модуль 818g оптимизации скорости проходки связывается с модулями 818c, 420a, 420b и 420f управления таким образом, чтобы модули контроля могли определить, могут ли управляющие изменения оптимизировать скорость проходки таким путем, который максимально повышает производительность и эффективность.
Модуль 818h оптимизации срока службы долота может оценивать данные, полученные от модуля 430 данных от датчиков, а также данные ориентации торца долота, включая азимут, данные отклонения ориентации торца долота, продолжительность бурения, чтобы определить наиболее эффективный способ сохранения срока службы долота без снижения эффективности или производительности. После оценки указанных или других факторов модуль оптимизации срока службы долота взаимодействует с модулями 818c, 420a, 420b, 420f управления так, чтобы модули управления могли определить, действительно ли изменения регулирования сохранили срок службы долота таким путем, который максимизирует производительность и эффективность.
Модуль 818i оптимизации на основе удельной механической энергии выполняет процессы оптимизации на основе удельной механической энергии, описанные выше применительно к фиг. 6A, 6C и 6D. Выводы 818i модуля оптимизации могут быть связаны с модулями 818c, 420a, 420b, 420f, управления чтобы фактически осуществлять изменения, которые приводят к повышению эффективности.
Модуль 818j оптимизации на основе d-экспоненты может включать устройство 804g для вычисления d-экспоненты, которое предназначено для определения d-экспоненты и оценки скорости проходки, что позволяет обнаруживать или прогнозировать зоны с аномальным поровым давлением. Таким образом, поскольку модуль d-экспоненты определяет разность при нормальном давлении, модуль d-экспоненты может взаимодействовать с модулями 818c, 420a, 420b, 420f управления при оценке, что делает необходимыми какие-либо изменения управления для эффективного бурения.
Модуль 818k оптимизации на основе скорректированной d-экспоненты может включать устройство 804h для вычисления скорректированной d-экспоненты. Используя полученные данные, модуль 818k оптимизации корректирует значение d-экспоненты с учетом веса бурового раствора, который может быть связан непосредственно с пластовым давлением, а не с дифференциальным давлением. Указанное скорректированное значение может также поступать в модули 818c, 420a, 420b, 420f управления при оценке, что делает необходимыми какие-либо изменения управления для эффективного бурения.
Модуль 818m оптимизации ОНБК может оценивать данные, полученные от модуля 430 данных от датчиков, ввод данных в модуле ручного ввода данных 714a, а также другие доступные данные, с целью определения профилей оптимизации для ОНБК. В некоторых вариантах осуществления модуль 818m оптимизации ОНБК обрабатывает информацию, полученную от других модулей в ведущем модуле 718 управления процессом бурения. Используя данную информацию, модуль оптимизации ОНБК 818m выдает данные модулям 818c, 420a, 420b, 420f управления при оценке, что делает необходимыми какие-либо изменения управления ОНБК при оптимизации ОНБК.
Как и модуль 420b управления буровой лебедки, модуль 420a управления верхнего привода и модуль 420f управления бурового насоса получают информацию от модулей оптимизации, они обрабатывают данные для определения, каким образом, положительно или отрицательно, взаимодействие рекомендованных изменений влияет на общую производительность системы скважин, и генерируют сигналы управления, инструктирующие буровую лебедку 130, верхний привод 140 и буровой насос 180, показанные на фиг. 1, осуществляя изменения с максимальной эффективностью.
На фиг. 8C показан примерный способ 830, выполняемый ведущим модулем 818 управления процессом бурения для оптимизации общего процесса бурения на буровой установке. Как описано выше, некоторые варианты осуществления ведущего модуля 818 управления процессом бурения не включают все модули оптимизации, показанные на фиг. 8B. Таким образом, способ 830 рассматривает обстоятельства, при которых ведущий модуль управления процессом бурения включает один, больше одного или не все из показанных модулей оптимизации. Предполагается, что указанные модули являются примерными и что в них могут быть включены другие модули оптимизации.
Способ 830 включает операции, которые выполняются параллельно, и могут не выполняться последовательно. В некоторых вариантах осуществления указанные параллельные пути способа представляют собой альтернативные пути и могут быть осуществлены на основе конфигурации ведущего модуля управления процессом бурения и/или доступности модулей оптимизации. Например, с операции 832 способ 830 продолжают до операций 834, 840, 846, 852, 858. Все они описаны ниже.
На фиг. 8C, в операции 832 ведущий модуль 718 управления процессом бурения получает ручные вводы и/или данные датчиков из модуля 814a ручного ввода данных и/или модуля 430 данных от датчиков (ввод или данные датчиков не показаны). В некоторых случаях ведущий модуль 718 управления процессом бурения может получать доступ к данным динамики, сохраненным в предыдущих замерах инклинометрии.
Используя указанную информацию и данные, модули оптимизации в ведущем модуле 818 управления процессом бурения вычисляют или иным образом обрабатывают данные, используя алгоритмы для определения значения оптимизации для любого числа факторов, влияющих на эффективность или производительность бурения, включая скорость проходки. В некоторых вариантах осуществления альтернативные пути на фиг. 8C зависят от доступности модулей оптимизации. Например, с операции 832 способ 830 продолжают до операции 834, если ведущий модуль 818 управления процессом бурения из модулей оптимизации включает только модуль 818g оптимизации скорости проходки. В альтернативе, с операции 832 способ 830 продолжают до операции 840, если ведущий модуль 818 управления процессом бурения включает только один из модуля 818i оптимизации на основе удельной механической энергии, модуля 818j оптимизации на основе d-экспоненты, модуля 818k оптимизации на основе скорректированной d-экспоненты и модуля 818m оптимизации ОНБК. Опять же, в альтернативе, начиная с операции 832, способ 830 продолжают до операции 846, если ведущий модуль 818 управления процессом бурения включает больше одного модуля оптимизации. Способ 832 продолжают до операции 852, если ведущий модуль 818 управления процессом бурения включает модуль 818g оптимизации скорости проходки и один из модуля 818i оптимизации на основе удельной механической энергии, модуля 818j оптимизации на основе d-экспоненты, модуля 818k оптимизации на основе скорректированной d-экспоненты и модуля 818m оптимизации ОНБК. Способ 832 продолжают до операции 858, если ведущий модуль 818 управления процессом бурения включает модуль 818g оптимизации скорости проходки и больше одного модуля 818i, 818j, 818k, 818l, 818m оптимизации.
В альтернативных вариантах осуществления ведущий модуль 818 управления процессом бурения выполняет все операции способа вместо обработки их как альтернативных операций, как описано выше. Таким образом, хотя ведущий модуль управления процессом бурения включает множество модулей оптимизации, он все еще оценивает модуль 818g оптимизации скорости проходки независимо в операции 834, оценивает один из других модулей оптимизации независимо в операции 840, и точно так же с операциями 846, 852 и 858.
При обстоятельствах, когда в ведущий модуль 818 управления процессом бурения включен только модуль 818g оптимизации скорости проходки или ведущий модуль 818 управления предназначен для оценки только модуля 818g оптимизации скорости проходки, в операции 834, модуль 818g оптимизации скорости проходки определяет изменения параметров бурения, которые оптимизируют процесс бурения на основе скорости проходки с использованием ручных вводов и/или данных от датчиков. Указанные изменения параметров бурения передаются в модуль 818c управления ОНБК, модуль 420b управления буровой лебедки, модуль 420a управления верхнего привода и/или модуль 420f управления бурового насоса. В операции 836 указанные модули управления изменяют один или более сигналов управления, посылаемых ОНБК, буровой лебедке, верхнему приводу и/или буровому насосу для изменения параметра (параметров) бурения, необходимых для оптимизации процесса бурения на основе скорости проходки.
При обстоятельствах, когда в ведущий модуль 818 управления процессом бурения включен только один модуль оптимизации, или ведущий модуль 818 управления предназначен для оценки только одного модуля 840 оптимизации, в операции, с помощью модуля 818i оптимизации на основе удельной механической энергии, модуля 818j оптимизации на основе d-экспоненты, модуля 818k оптимизации на основе скорректированной d-экспоненты и модуля 818m оптимизации ОНБК ведущий модуль 818 управления процессом бурения может вычислить одно из удельной механической энергии, d-экспоненты, скорректированной d-экспоненты и значений оптимизации ОНБК, на основе данных, полученных от модуля данных от датчиков или модуля 814a ручного ввода данных. На основе указанных данных, в операции 842, ведущий модуль 818 управления процессом бурения может определить изменения параметра бурения, необходимые для оптимизации процесса бурения на основе одного вычисленного значения из удельной механической энергии, d-экспоненты, скорректированной d-экспоненты и значений оптимизации ОНБК. Указанные изменения параметра бурения поступают в модуль 818c управления ОНБК, модуль 420b управления буровой лебедки, модуль 420a управления верхнего привода и/или модуль 420f управления бурового насоса. В операции 844 указанные модули управления изменяют сигналы управления, посылаемые ОНБК, буровой лебедке, верхнему приводу и/или буровому насосу с целью изменения параметров бурения, необходимых для оптимизации процесса бурения на основе вычисленного значения.
При обстоятельствах, когда в ведущий модуль управления процессом бурения включено больше одного модуля оптимизации, в операции 846 с помощью модулей 818i, 818j, 818k, 8181, 818m оптимизации ведущий модуль 818 управления процессом бурения предпочтительно вычисляет больше одного (обычно, по меньшей мере, два) параметра из удельной механической энергии, d-экспоненты, скорректированной d-экспоненты и значений оптимизации ОНБК, на основе данных, полученных от модуля данных от датчиков или модуля 814a ручного ввода данных. На основе указанных данных, в операции 848, ведущий модуль управления процессом бурения 818 может определить изменения параметра бурения, необходимые для оптимизации процесса бурения на основе ряда расчетных значений. Данные изменения параметра бурения поступают в модуль 818c управления ОНБК, модуль 420b управления буровой лебедки, модуль 420a управления верхнего привода и/или модуль 420f управления бурового насоса, и в операции 850 указанные модули управления изменяют сигналы управления, посылаемые ОНБК, буровой лебедке, верхнему приводу и/или буровому насосу с целью изменения параметров бурения, необходимых для оптимизации процесса бурения на основе ряда вычисленных значений.
При обстоятельствах, когда в ведущий модуль 818 управления процессом бурения включен модуль 818g оптимизации скорости проходки и только один другой модуль оптимизации или ведущий модуль 818 управления предназначен для оценки только модуля 818g оптимизации скорости проходки и только одного другого модуля оптимизации, в операции 854, ведущий модуль 818 управления процессом бурения предпочтительно определяет изменения параметра бурения, необходимые для оптимизации процесса бурения на основе одного вычисленного значения и значение оптимизации скорости проходки. Указанные значения поступают в модули управления и, в операции 856, указанные модули управления могут изменить сигналы управления, посылаемые ОНБК, буровой лебедке, верхнему приводу и/или буровому насосу с целью изменения параметров бурения, необходимых для оптимизации процесса бурения на основе вычисленного значения.
При обстоятельствах, когда в ведущий модуль управления процессом бурения включены модуль оптимизации скорости проходки и больше одного дополнительного модуля оптимизации, в операции 858, с помощью модулей 818i, 818j, 818k, 8181, 818m оптимизации ведущий модуль 818 управления процессом бурения вычисляет больше одного параметра из d-экспоненты, скорректированной d-экспоненты и значений оптимизации ОНБК, на основе данных, полученных от модуля данных от датчиков и/или модуля 814a ручного ввода данных. В данном случае, ведущий модуль 818 управления процессом бурения оценивает скорость проходки, определяя изменения параметра бурения, необходимые для оптимизации процесса бурения. Таким образом, ведущий модуль 818 управления процессом бурения может оценивать множество вычисленных значений, полученных от модулей оптимизации, включая скорость проходки, для определения оптимизированных изменений параметра бурения. Указные изменения параметра бурения поступают в модули 818c, 420b, 420a и/или 420f управления, и в операции 862 указанные модули управления изменяют сигналы управления, посылаемые ОНБК, буровой лебедке, верхнему приводу и/или буровому насосу с целью изменения параметров бурения, необходимых для оптимизации процесса бурения на основе множества вычисленных значений.
Независимо от того, какой путь используется, после отправки измененных сигналов управления из ведущего модуля управления процессом бурения модуль 814b вывода изображения предпочтительно обновляет дополнительный, но предпочтительный дисплей интерфейса в операции 838, отображая указанные новые измененные сигналы управления. Дисплей интерфейса далее обсуждается в настоящем описании и включен в него.
В некоторых случаях ведущий модуль 818 управления процессом бурения выполняет все или некоторые из операций 834, 840, 846, 852, 858 в одно и то же время, или в достаточно быстрой последовательности, почти одновременно, и сигналы управления изменяются на основе множественных вводов из системы.
На фиг. 9A и 9B показаны блок-схемы, детализирующие способы оптимизации точности наклонно-направленного бурения в ходе операций бурения, выполняемых с помощью устройства 100 на фиг. 1. При осуществлении способов фиг. 9A и 9B может использоваться любая из систем управления, раскрытых в настоящей заявке, включая фиг. 1, 3, 4A-C, 6B, 8A и 8B. Данные, полученные в режиме реального времени в указанных способах, могут быть сконфигурированы в качестве вводов на фиг. 4A с целью оптимизации процесса бурения и вычисления позиции долота для идентификации и корректировки каких-либо отклонений долота от заданной траектории бурения в ходе операций бурения.
На фиг. 9A показана блок-схема способа 900 согласно одному или более аспектам настоящего описания. Способ 900 может быть выполнен во взаимодействии с одним или более элементами устройства 100, показанного на фиг. 1, в ходе работы устройства 100. Например, способ 900 может быть выполнен с целью оптимизации точности наклонно-направленного бурения в ходе операций бурения, выполняемых с помощью устройства 100.
Способ 900 включает операцию 910, в ходе которой положение торца долота в реальном времени, глубина скважины, вращение трубы, нагрузка на крюк, перепад давления и/или другие данные поступают в контроллер или другое устройство для обработки данных (например, любой контроллер 190, 325, 420, 402, 698, 804, 812 или другие, описанные в настоящей заявке). Данные могут быть получены от различных приборов на буровой установке и/или датчиков, предназначенных для подобных измерений (таких как датчики, показанные на фиг. 1, 4A, 8 A, и другие). Операция 910 также может включать получение смоделированного резкого изгиба ствола и/или другие данные плана бурения, взятые от инклинометрических замеров или полученные иным путем. В следующей операции 920 оперативные и/или смоделированные данные, полученные в ходе операции 910, используются для вычисления инклинометрических проекций в реальном времени перед последним результатом стандартной инклинометрии. Инклинометрическая проекция в реальном времени, вычисленная в ходе операции 920, может затем, необязательно, временно использоваться в качестве следующей стандартной точки инклинометрии в ходе последующей операции 930. Способ 900 может также включать операцию 940, выполняемую после операции 920 и/или операции 930, в ходе которой инклинометрическая проекция в реальном времени, вычисленная в ходе операции 920, сравнивается с планом бурения в соответствующей глубине скважины. Операция 950 может выполняться после операции 930 и/или до операции 940, при этом во время нее технолог по наклонно-направленному бурению получает инклинометрическую проекцию в реальном времени, вычисленную в ходе операции 920, и/или результаты сравнения, выполненного в ходе операции 940. Следовательно, технолог по наклонно-направленному бурению может более точно оценить продвижение текущей операции бурения даже в отсутствие какого-либо прямого наклона и измерений азимута на глубине скважины.
В примере осуществления в рамках настоящего описания способ 900 затем повторят так, что поток способа возвращают к операции 910 и начинают снова. Итерация способа 900 может использоваться для оценки работы оборудования низа бурильной колонны. Кроме того, итерация может позволить модели вычисления проекции инклинометрии в реальном времени обновляться каждый раз при получении данных инклинометрии. Применение способа 900, по меньшей мере, в некоторых вариантах осуществления, может помочь технологу по наклонно-направленному бурению в процессе бурения при применении радиуса набора кривизны и угловой скорости поворота к безроторным интервалам и проекциям по интервалам, проходимым посредством роторного бурения.
Как описано выше, обычный подход включает проведение стандартной инклинометрии в каждом соединении бурильной трубы с целью получения измерения наклона и азимута для нового положения инклинометрии. Таким образом, в предшествующем уровне техники проводят измерения после того, как скважина пробурена. В отличие от этого, с помощью способа 900 и других способов, в объеме настоящего описания, перед последней стандартной инклинометрией проводят измерения в реальном времени, которые могут предоставить технологу по наклонно-направленному бурению информацию относительно продвижения и эффективности операции безроторного или роторного бурения.
На фиг. 9B показана блок-схема упрощенного варианта способа 900, показанного на фиг. 9A, который обозначен как 900a. Способ 900a включает операцию 910, в ходе которой от приборов на буровой установке получают данные положения торца долота и измерений глубины скважины. Операция 910 может также включать получение данных модели или плана бурения, соответствующие оперативным данным, полученным от приборов на буровой установке. Такой прием оперативных и/или смоделированных данных может происходить в одном или нескольких контроллерах, устройствах обработки данных и/или других устройствах, таких как контроллер 190, показанный на фиг. 1.
В следующей операции 960 указанные измерения используют вместе с моделированными или вычисленными данными, полученными из предыдущих замеров инклинометрии (например, включающими темп набора кривизны стволом, резкое искривление ствола и т.д.), с целью отслеживания проходки скважины путем вычисления проекции инклинометрии в реальном времени, с последующим сравнением проекции с планом бурения. Затем повторяют операции 910 и 960, по возможности с темпами или интервалами, которые дают высокую степень разрешения. Операция 960 может также включать усреднение полученных данных по интервалам глубины (например, усреднение последних полученных данных с ранее полученными данными). Таким образом, данные, полученные в ходе операции 910 и обработанные в ходе операции 960, могут обеспечивать точное разрешение, возможно на основании фут-за-футом в ходе операции безроторного бурения, и могут демонстрировать, как на конкретную операцию бурения может повлиять или влияет то, насколько точно поддерживается определенный торец долота.
Обзор с высоким разрешением текущей скважины в сопоставлении с планом бурения часто является ключевым в определении эффективности операции безроторного бурения. Например, в пределах интервала с соединением внахлест технологу по наклонно-направленному бурению может потребоваться (например, согласно плану бурения) выполнить безроторное бурение на отрезке 20 футов, 50 футов роторного бурения, а затем опять 20 футов безроторного бурения. Обычно бурильщик не будет знать эффективность данной секции, пока он не получит данные следующего замера инклинометрии, выполняемого после попытки выполнить операцию "безроторного-роторного-безроторного" бурения. Впрочем, согласно одному или более аспектам настоящего описания, бурильщик может вычислить, используя проекции инклинометрии в реальном времени в ходе операции "безроторного-роторного-безроторного" бурения, прогнозируемую траекторию долота в скважине. Таким образом, точность, с которой выполняется операция "безроторного-роторного-безроторного" бурения, может быть существенно увеличена, и в случае применения при осуществлении способа на фиг. 5A обеспечивает более точную коррекцию направления по сравнению с обычными системами. Кроме того, способы 900 и 900a могут включать обновление радиуса набора кривизны и модель по каждому замеру инклинометрии в режиме реального времени, обеспечивая, таким образом, повышение точности каждого последующего замера, проекции инклинометрии и/или стадии бурения.
Фиг. 10A и 10B являются примерными изображениями пользовательских дисплеев, передающих информацию о местоположении долота пользователю. Дисплей на Фигурах может являться любым дисплеем, описанным в настоящей заявке, включая дисплеи 335, 472, 692c и 810. На фиг. 10A показано схематическое изображение операторского интерфейса 1000 согласно одному или более аспектам настоящего описания. Интерфейс 100 может использоваться человеком-оператором в ходе наклонно-направленного бурения и/или других операций бурения для контроля отношения между ориентацией торца долота и положением вала. В примере осуществления интерфейс 1000 представляет собой один из нескольких дисплеев, выбираемых пользователем в процессе операций бурения, и может быть включен в качестве или в пределах операторских интерфейсов, буровых операций и/или буровых устройств, описанных в системах в настоящей заявке и системах, включенных путем ссылки, интерфейс 100 может быть также исполнен в виде ряда инструкций, записанных на машиночитаемом носителе, таком как описанный в одной или более указанных ссылок.
Интерфейс 100 используется технологом наклонно-направленного бурения в процессе бурения с целью контроля ОНБК в трехмерном пространстве. Система управления или компьютер, который управляет одним или несколькими другими операторскими интерфейсами в ходе процесса бурения, могут также обеспечивать отображение интерфейса 1000. В альтернативе, интерфейс 1000 может управляться или отображаться отдельной системой управления или компьютером, и может отображаться на компьютерном дисплее (мониторе), отличном от того, на который выводятся остальные изображения процесса бурения.
Система управления или компьютер, управляющие интерфейсом 1000, включают "инклинометрический" или другой канал данных, или включают иные средства для получения и/или считывания данных от датчиков, передаваемых от ОНБК, оборудования "измерения в процессе бурения" и/или других средств измерения параметра бурения, где подобная передача может выполняться посредством Протокола обмена данными с буровой, языка разметки и/или другого протокола передачи данных. Такие электронные данные могут включать данные по ориентации торца долота на основе гравитации, данные по ориентации торца долота на основе магнитного поля, данные по ориентации азимута торца долота и/или данные по ориентации наклона торца долота, среди прочих. В примере осуществления электронные данные включают данные по ориентации торца долота на основе магнитного поля, когда ориентация торца долота меньше, чем приблизительно 7° относительно вертикали, и альтернативно включают данные по ориентации торца долота на основе гравитации, когда ориентация торца долота превышает приблизительно 7° относительно вертикали. Впрочем, в других вариантах осуществления электронные данные могут включать данные по ориентации торца долота и на основе гравитации, и на основе магнитного поля. Данные по ориентации азимута торца долота могут относиться к азимутальному направлению удаленного конца бурильной колонны относительно географического севера, верхней стороны ствола скважины и/или другой заданной ориентации. Данные по ориентации наклона торца долота могут относиться к наклону удаленного конца бурильной колонны относительно вертикали.
Как показано на фиг. 10A, интерфейс 1000 может быть изображен, как по существу напоминающий форму диска или мишени, имеющей множество концентрических вложенных колец 1005. Данные по ориентации торца долота на основе магнитного поля представлены в интерфейсе 1000 символами 1010, а данные по ориентации торца долота на основе гравитации представлены символами 1015. Интерфейс 1000 также включает символы 1020, указывающие положения вала. В примере осуществления, показанном на фиг. 10A, символы 1010 магнитных данных торца долота являются круглыми, символы 1015 гравитационных данных торца долота являются прямоугольными, и символы 1020 данных о положении вала являются треугольными, что позволяет, таким образом, отличить различные типы данных друг от друга. Конечно, в рамках настоящего описания могут использоваться другие формы. Символы 1010, 1015, 1020 дополнительно или альтернативно могут отличаться друг от друга цветом, размером, подсветкой, частотой мерцания и/или другими графическими средствами.
Символы 1010, 1015, 1020 могут указывать только самые последние измерения положения торца долота (символы 1010, 1015) и вала символа (120). Впрочем, как и в примере осуществления, показанном на фиг. 10A и 10B, интерфейс 1000 может включать представление предыдущих измерений положения торца долота и вала, при этом показывается последнее измерение и несколько предыдущих измерений. Таким образом, например, каждое кольцо 1005 в интерфейсе 1000 может представлять итерацию измерения или счет, или заданный интервал времени, или иным путем указывать динамику между новым измерением (измерениями) и предыдущим измерением (измерениями). В примере осуществления, показанном на фиг. 10A, в диске присутствует пять таких колец 1005 (внешнее кольцо предназначено для указания других данных), причем каждое кольцом 1005 представляет измерения данных или итерацию передачи, или счет. Символы 1010, 1015 торца долота могут включать число, указывающее относительную давность каждого измерения. В других вариантах осуществления цвет, форма и/или другие знаки могут графически отображать относительную давность измерения. Хотя на фиг. 10A это не показано, данная концепция может также применяться для отображения предыдущих данных о положении вала.
Интерфейс 1000 может также включать пояснение обозначений данных 1025, связанных с формой, цветом и/или другими параметрами символов 1010, 1015, 1020 данных для соответствующих данных, представленным символами. Интерфейс 1000 может также включать текстовый и/или другой тип индикатора 1030 текущего режима настройки торца долота. Например, режим торца долота может быть установлен на отображение только гравитационных данных торца долота, только магнитных данных торца долота или их комбинации (возможно на основе текущего наклона торца долота и/или конца бурильной колонны). Индикатор 1030 может также указывать текущее время системы. Индикатор 1030 может также идентифицировать вторичный канал либо контролируемый параметр или параметр, иным путем отображаемый интерфейсом 1000. Например, в примере осуществления, показанном на фиг. 10A, индикатор 1030 указывает, что комбинация ("Комбо") режима торца долота в настоящий момент выбрана пользователем, что глубина долота контролируется по вторичному каналу и что текущее время системы - 13:09:04.
Интерфейс 1000 может также включать текстовый и/или другой тип индикатора 1035, показывающий текущую или последнюю ориентацию торца долота. Индикатор 1035 может также показывать текущий режим измерения торца долота (например, гравитационный или магнитный). Индикатор 1035 может также показывать время, в которое было выполнено или получено последнее измерение торца долота, а также и значение любого параметра, отслеживаемого в тот момент вторым каналом. Например, в примере осуществления, показанном на фиг. 10A, последнее измерение торца долота было выполнено гравитационным датчиком торца долота и показало, что ориентация торца долота составляла -75°, что измерение было выполнено в 13:00:13 по часам системы и что последняя глубина долота, измеренная в указанное время, составляла 1830 футов.
Интерфейс 1000 может также включать текстовый и/или другой тип индикатора 1040, показывающий текущий или последний наклон удаленного конца бурильной колонны. Индикатор 1040 может также показывать время, в которое было выполнено или получено последнее измерение наклона, а также значение любого параметра, отслеживаемого в тот момент вторым каналом. Например, в примере осуществления, показанном на фиг. 10A, последняя величина наклона конца бурильной колонны составляла 8°, при этом данное измерение было выполнено в 13:00:04 по часам системы, а последняя глубина долота, измеренная в указанное время, составляла 1830 футов. Интерфейс 1000 может также включать дополнительный графический или другой тип индикатора 1040a, показывающий текущий или последний наклон. Таким образом, например, интерфейс 1000 может отображать текущую или последнюю величину наклона с помощью и текстового индикатора (например, индикатора 1040), и графического индикатора (например, индикатора 1040a). В варианте осуществления, показанном на фиг. 10A, графический индикатор наклона 1040a представляет текущую или последнюю величину наклона в виде дугообразной полосы, длина которой указывает степень, в которой наклон отклоняется относительно вертикали, и где направление, в котором тянется полоса (например, по часовой стрелке или против часовой стрелки), может указывать направление наклона (например, север или юг).
Интерфейс 1000 может также включать текстовый и/или другой тип индикатора 1045, показывающий текущую или последнюю ориентацию азимута удаленного конца бурильной колонны. Индикатор 1045 может также показывать время, в которое было выполнено или получено последнее измерение азимута, а также значение любого параметра, отслеживаемого в тот момент вторым каналом. Например, в примере осуществления, показанном на фиг. 10A, последнее значение азимута конца бурильной колонны составляло 67°, при этом данное измерение было выполнено в 12:59:55 по часам системы, а последняя глубина долота, измеренная в указанное время, составляла 1830 футов. Интерфейс 1000 может также включать дополнительный графический или другой тип индикатора 1045a, показывающий текущую или последнюю величину наклона. Таким образом, например, интерфейс 1000 может отображать текущий или последний наклон с помощью и текстового индикатора (например, индикатора 1045), и графического индикатора (например, индикатора 1045a). В варианте осуществления, показанном на фиг. 10A, графический индикатор 1045a азимута представляет текущее или последнее измерение азимута в виде дугообразной полосы, длина которой указывает степень, в которой ориентация азимута отклоняется от географического севера или некоторого другого заданного положения, и где направление, в котором тянется полоса (например, по часовой стрелке или против часовой стрелки), может указывать направление азимута (например, северо-восток или северо-запад).
В некоторых вариантах осуществления интерфейс 1000 включает данные, соответствующие заданной траектории бурения и фактической траектории бурения, описанных на фиг. 4C и 5A. Указанные данные могут предоставить бурильщику визуальный индикатор местоположения долота ОНБК относительно заданной траектории бурения и/или целевого местоположения. Кроме того, данные, регистрируемые в динамике, отображаемые в интерфейсе 1000 на фиг. 10A, можно оценить при вычислении положения ОНБК, независимо от того, отклоняется ли ОНБК от заданной траектории бурения и в какой зоне, показанной на фиг. 5B, ОНБК расположено.
На фиг. 10B показано увеличенное изображение части интерфейса 1000, показанного на фиг. 10A. В вариантах осуществления, в которых интерфейс 1000 изображен в форме диска или мишени, последние измерения положения торца долота и вала могут быть расположены ближе к краю диска, а предыдущие показания могут отступать к середине диска. Например, в примере осуществления, показанном на фиг. 2, последнее показание было получено за 8 минут до отображаемого в текущий момент времени системы, следующее показание было получено за 7 минут до первого, а самое старое показание было получено на 6 минут раньше, чем остальные, в общей сложности в течение 21 минуты регистрации. Показания, полученные несколько часов или секунд назад, могут указывать продолжительность/единицу времени символами "ч" или "с".
Как также показано на фиг. 10B, при наведении курсора мыши пользователя или других графических средств ввода пользователя на один из символов положения торца долота или вала 1010, 1015, 1020 может быть показана временная метка символа, а также вторичный индикатор (если таковой присутствует) в окне 1050. Временные метки могут зависеть от параметров настройки устройства в фактическое время регистрации измерения. Символы 1010, 1015 торца долота могут показывать время, прошедшее после регистрации измерения сенсорным устройством (например, относительно текущего времени системы). Вторичные каналы, настроенные, чтобы показывать временную метку, могут показывать временную метку, соответствующую устройству, регистрирующему измерение.
В варианте осуществления, показанном на фиг. 10A и 10B, интерфейс 1000 показывает абсолютное положение вала верхнего привода, ориентированного на географический север, верхнюю сторону скважины или на некоторое другое заданное направление. Интерфейс 1000 также показывает текущие и предыдущие данные торца долота, полученные от скважинных приборов. Интерфейс 1000, другие операторские интерфейсы в рамках настоящего описания и/или другие приборы в рамках настоящего описания могут иметь, обеспечивать и/или демонстрировать упрощенное понимание эффекта реактивного крутящего момента на измерения торца долота, точно контролируя и одновременно отображая измерения положения и торца долота, и вала пользователю.
Ввиду вышеизложенного, а также фигур и ссылок, включенных в настоящую заявку, средним специалистам в данной области техники будет очевидно, что в настоящем описании предложен способ видимой демонстрации отношений между ориентацией торца долота и ориентацией вала, при этом такой способ включает: получение электронных данных на постоянной основе, которые включают данные по ориентации вала и, по меньшей мере, одно из данных по ориентации торца долота на основе гравитации и данных по ориентации торца долота на основе магнитного поля и вывод электронных данных на дисплей, доступный для обзора пользователя, в историческом формате, отображающем данные, полученные в последнем измерении и множестве предыдущих измерений. Электронные данные могут также включать данные азимута торца долота, связывающие ориентацию азимута бурильной колонны около долота. Электронные данные могут далее включить торец долота данные склонности, связывая склонность бурильной колонны около долота. Данные положения вала могут связывать ориентацию вала, верхнего привода, ведущей трубы и/или другие устройства роторного двигателя с долотом и/или торцом долота. Электронные данные могут быть получены от ИПБ и/или других сенсорных/измерительных скважинных устройств.
Способ может также включать соединение электронных данных с показаниями времени, основанных на определенных моментах, в которые были выполнены измерения, дающие электронные данные. В примере осуществления самые последние данные могут быть отображены в текстовой форме, а предыдущие данные могут быть показаны графически, например в виде индикации в форме диска или мишени. Графический дисплей может включать зависимые от времени или времяспецифические символы или другие изображения, которые в режиме, доступном для пользователя, могут временно отображать данные, относящиеся к указанному времени (например, всплывающие данные). Иконки могут иметь числовую, текстовую, цветовую или другую индикацию по давности относительно других иконок. Иконки могут соответствовать времени, последнему на крае диска, первому в центре диска. Иконки могут отображать изменение во времени от измерения, зарегистрированного соответствующим сенсорным устройством, до текущего времени компьютерной системы. Дисплей может также отображать текущее время системы.
В настоящем описании также предложено устройство, содержащее приспособления для приема электронных данных на постоянной основе, где электронные данные включают данные по ориентации вала и, по меньшей мере, одно из данных по ориентации торца долота на основе гравитации и данных по ориентации торца долота на основе магнитного поля и приспособления для вывода электронных данных на дисплей, доступный для обзора пользователя, в историческом формате, отображающем данные, полученные в последнем измерении и множестве предыдущих измерений.
Варианты осуществления в рамках настоящего описания могут предоставлять определенные преимущества по сравнению с предшествующим уровнем техники. Например, когда данные положения торца долота и вала объединены на одном дисплее, это может помочь оператору или другому работнику понять отношения между положением вала и торцом долота. Объединение данных положения торца долота и вала на одном дисплее может дополнительно или альтернативно помочь пониманию отношений, посредством которых реактивный крутящий момент связан с положением торца долота и/или вала.
На фиг. 11 показана примерная система 1100 для осуществления одного или более вариантов осуществления, по меньшей мере, части устройства и/или способов, описанных в настоящей заявке. Система 1100 включает процессор 1102, устройство 1104 ввода, устройство 1106 хранения данных, видеоконтроллер 1108, системную память 1110, дисплей 1114 и устройство 1116 связи, связанные одной или более шинами 1112. Устройство 1106 хранения данных может являться дискетой, жестким диском, компакт-диском, DVD, накопителем на оптических дисках или любой другой формой устройства хранения данных. Кроме того, устройство хранения данных 1106 может быть способно к приему дискеты, CD, DVD или любой другой формы машиночитаемого носителя, который может содержать машиноисполняемые команды. Устройство 1116 связи может являться модемом, сетевой картой или любым другим устройством, с помощью которого система 1100 может связываться с другими системами.
Компьютерная система обычно включает, по меньшей мере, аппаратное оборудование, способное к выполнению машиночитаемых команд, а также программное обеспечение для выполнения действий (обычно машиночитаемых команд), которые производят желаемый результат. Кроме того, компьютерная система может включать гибриды аппаратного оборудования и программного обеспечения, а также компьютерные подсистемы.
Аппаратное оборудование обычно включает, по меньшей мере, процессорные платформы, такие как пользовательские машины (также известные как персональные компьютеры или серверы), а также карманные устройства обработки данных (такие как, например, смартфоны, КПК, а также персональные вычислительные устройства). Кроме того, аппаратное оборудование обычно включает любое физическое устройство, которое способно к хранению машиночитаемых команд, например память или другие устройства хранения данных. Другие формы аппаратного оборудования включают подсистемы аппаратного оборудования, включающие устройства передачи, такие как модемы, карты-модемы, порты и порт-карты, например. Аппаратное оборудование может также включать, по меньшей мере, в рамках настоящего описания, многомодальную технологию, как например устройства и/или системы, позволяющие пользователям использовать множественные формы ввода и вывода, включающие голос, клавиатуры и перо - попеременно в том же взаимодействии, применении или интерфейсе.
Программное обеспечение может включать любой машинный код, сохраненный на любом носителе, таком как RAM или ROM, машинный код, сохраненный на других устройствах (таких как дискеты, CD или DVD, например), и может включать исполняемый код, операционную систему, а также исходный или объектный код, например. Кроме того, программное обеспечение может охватывать любой набор инструкций, исполняемых в пользовательской машине или сервере и, в данной форме, часто называемых программой или исполняемым кодом.
Гибриды (комбинации программного обеспечения и аппаратного оборудования) становятся все более обычными как устройства для обеспечения повышенной функциональности и эффективности компьютерных систем. Гибрид может быть создан, когда то, что традиционно является программными функциями, непосредственно вшивают в кремниевый кристалл в процессе производства - это возможно, так как программное обеспечение может быть собрано и переведено в бинарный код, и, точно так же бинарный код может быть представлен непосредственно в кремнии. Как правило, функции гибрида (изготовленного аппаратного оборудования) разработаны, чтобы работать без прошивки программным обеспечением. Соответственно, необходимо понимать, что гибриды и другие комбинации аппаратного оборудования и программного обеспечения также включены в определение компьютерной системы в настоящей заявке и, таким образом, предусмотрены настоящим описанием как возможно эквивалентные структуры и эквивалентные способы.
Машиночитаемые носители могут включать пассивное запоминающее устройство, такое как оперативное запоминающее устройство (RAM), а также полупостоянное запоминающее устройство, например CD или DVD. Кроме того, вариант осуществления настоящего описания может быть воплощен в виде RAM компьютера и может эффективно преобразовывать стандартный компьютер в новую специальную вычислительную машину.
Структуры данных являются определенными организациями данных, которые могут обеспечивать вариант осуществления настоящего описания. Например, структура данных может предоставить организацию данных или организацию исполняемого кода (исполняемого программного обеспечения). Кроме того, сигналы данных переносятся в передающей среде и сохраняются, а также транспортируют различные структуры данных и, таким образом, могут использоваться для транспорта варианта осуществления изобретения. В настоящем описании следует отметить, что процессы с подобными названиями могут быть выполнены подобным способом, если не указано иное.
Контроллеры и/или системы настоящего описания могут быть разработаны так, чтобы работать на любой определенной архитектуре. Например, контроллеры и/или системы могут исполняться на одном или нескольких компьютерах, в сетях Ethernet, локальных сетях, глобальных сетях, Интернете, интранете, карманных и других портативных и беспроводных устройствах и сетях.
Ввиду всего вышеизложенного, а также фиг. 1-11, средним специалистам в данной области техники будет очевидно, что в настоящем описании предложен способ направления оборудования низа бурильной колонны в ходе процесса бурения от буровой установки к подземному целевому местоположению. Способ включает разработку плана бурения, включающего траекторию бурения и допустимый предел погрешности в виде зоны допуска; получение данных, характеризующих ориентировку и проекцию глубины долота; определение фактического местоположения оборудования низа бурильной колонны на основе ориентировки и проекции глубины долота; определение, находится ли долото в пределах зоны допуска; сравнение фактического местоположения оборудования низа бурильной колонны с заданной траекторией бурения с целью определения уровня отклонения оборудования низа бурильной колонны от фактической траектории бурения; создание измененной траектории бурения, основанной на величине идентифицированного отклонения от заданной траектории, включающее: создание измененной траектории бурения, которая пересекает заданную траекторию бурения, если уровень отклонения от заданной траектории меньше, чем пороговый уровень отклонения, и создание измененной траектории бурения к целевому местоположению, которая не пересекает заданную траекторию бурения, если уровень отклонения от заданной траектории превышает пороговый уровень отклонения; определение требуемой ориентации торца долота с целью направления оборудования низа бурильной колонны по измененной траектории бурения; автоматическая и электронная генерация сигналов управления буровой установки в контроллере управления движением; и вывод сигналов управления буровой установки к буровой лебедке и верхнему приводу с целью направления оборудования низа бурильной колонны по измененной траектории бурения.
В настоящем описании также предложен способ применения вала для регулировки гидравлического двигателя при проходке ствола скважины в направлении, имеющем горизонтальный компонент, где вал и гидравлический двигатель присоединены на противоположных концах бурильной колонны, при этом способ включает: контроль фактической ориентации торца долота, приводимого в движение гидравлическим двигателем, посредством контроля параметра процесса бурения, характеризующего различие между фактической ориентацией торца долота и требуемой ориентацией торца долота; и регулировку положения вала на величину, которая зависит от контролируемого параметра процесса бурения. Величина регулирования положения вала может являться достаточной для компенсации различия между фактической и требуемой ориентацией торца долота. Регулировка положения вала может включать регулировку углового положения вала относительно ствола скважины, вертикального положения вала относительно ствола скважины или и того, и другого. Контроль параметра процесса бурения, характеризующего различие между фактической и требуемой ориентацией торца долота, может включать контроль множества параметров процесса бурения, характеризующих различия между фактической и требуемой ориентацией торца долота, а величина регулирования положения вала может также зависеть от каждого множества параметров процесса бурения.
Контроль параметра процесса бурения может включать контроль данных, полученных от датчика ориентации торца долота, а величина регулирования положения вала может зависеть от данных датчика ориентации торца долота. Датчик торца долота может включать гравитационный датчик торца долота и/или магнитный датчик торца долота.
Параметр процесса бурения может включать осевую нагрузку на долото, глубину долота в стволе скважины и/или скорость проникновения долота в ствол скважины. Параметр процесса бурения может включать перепад гидравлического давления в гидравлическом двигателе, который может быть скорректирован с учетом контролируемого давления текучей среды, присутствующей в кольцевом пространстве, определяемом между стволом скважины и бурильной колонной.
В примере осуществления контроль параметра процесса бурения, характеризующего различие между фактической и требуемой ориентацией торца долота, включает контроль данных, полученных от датчика ориентации торца долота, контроль нагрузки на долото, контроль глубины долота в стволе скважины, контроль скорости проходки (проникновения долота в ствол скважины), и контроль перепада гидравлического давления в гидравлическом двигателе. Регулировка положения вала может включать регулировку положения вала на величину, которая зависит от контролируемых данных датчика ориентации торца долота, контролируемой нагрузки на долото, контролируемой глубины долота в стволе скважины, контролируемой скорости проходки и указанного контролируемого перепада давления в гидравлическом двигателе.
Контроль параметра процесса бурения и регулировка положения вала могут быть выполнены одновременно с работой гидравлического двигателя. Регулировка положения вала может включать управление буровой лебедкой, которая регулирует нагрузку на долото на величину, которая зависит от контролируемого параметра процесса бурения. Регулировка положения вала может включать регулировку нейтрального углового положения вала, при этом способ может дополнительно включать колебание вала, вращение вала на заданный угол от нейтрального положения в направлении по часовой стрелке и против часовой стрелки.
В настоящем описании также предложена система для применения вала с целью регулировки гидравлического двигателя при проходке ствола скважины в направлении, имеющем горизонтальный компонент, где вал и гидравлический двигатель присоединены на противоположных концах бурильной колонны. В примере осуществления система включает приспособления для контроля фактической ориентации торца долота, которое приводится в движение гидравлическим двигателем, включает приспособления для контроля параметра процесса бурения, характеризующего различие между фактической ориентацией торца долота и требуемой ориентацией торца долота, и приспособления для регулировки положения вала на величину, которая зависит от контролируемого параметра процесса бурения.
Настоящее описание также обеспечивает устройство для применения вала с целью регулировки гидравлического двигателя при проходке ствола скважины в направлении, имеющем горизонтальный компонент, где вал и гидравлический двигатель присоединены на противоположных концах бурильной колонны. В примере осуществления устройство включает датчик, предназначенный для обнаружения параметра процесса бурения, характеризующего различие между фактической ориентацией торца долота, которое приводится в движение гидравлическим двигателем, и требуемой ориентацией торца долота; и контроллер торца долота, предназначенный для регулировки фактической ориентации торца долота посредством генерации сигнала управления приводом вала, регулирующего привод вала с целью регулировки углового положения вала в зависимости от контролируемого параметра процесса бурения.
В настоящем описании также предложен способ применения вала для регулировки гидравлического двигателя при проходке ствола скважины в направлении, имеющем горизонтальный компонент, где вал и гидравлический двигатель присоединены на противоположных концах бурильной колонны. В примере осуществления способ включает контроль перепада гидравлического давления в гидравлическом двигателе с одновременным управлением гидравлическим двигателем, а также регулировкой ориентации торца долота гидравлического двигателя посредством регулировки углового положения вала в зависимости от контролируемого перепада давления. Контролируемый перепад давления может являться скорректированным перепадом давления, вычисленным с использованием контролируемого давления текучей среды, присутствующей в кольцевом пространстве, определяемом между стволом скважины и бурильной колонной. Способ может дополнительно включать контроль текущей ориентации торца долота двигателя с одновременным управлением гидравлическим двигателем и регулировкой углового положения вала в зависимости от контролируемой ориентации торца долота. Способ может дополнительно включать контроль нагрузки на долото гидравлического двигателя с одновременным управлением гидравлическим двигателем и регулировкой углового положения вала в зависимости от контролируемой нагрузки на долото. Способ может дополнительно включать контроль глубины долота гидравлического двигателя в стволе скважины с одновременным управлением гидравлическим двигателем и регулировкой углового положения вала в зависимости от контролируемой глубины долота. Способ может дополнительно включать контроль скорости проникновения гидравлического двигателя в ствол скважины с одновременным управлением гидравлическим двигателем и регулировкой углового положения вала в зависимости от контролируемой скорости проходки. Регулировка ориентации торца долота может включать регулировку углового положения вала в зависимости от контролируемой нагрузки на долото и контролируемой скорости проходки. В альтернативе регулировка ориентации торца долота может включать регулировку углового положения вала в зависимости от контролируемой нагрузки на долото, контролируемой скорости проходки и текущей ориентации торца долота. Регулировка ориентации торца долота гидравлического двигателя может дополнительно включать управление буровой лебедкой, которая регулирует нагрузку на долото гидравлического двигателя в зависимости от контролируемого перепада давления. Угловое положение вала может являться нейтральным положением, при этом способ может дополнительно включать колебание вала, вращение вала на заданный угол от нейтрального положения в направлении по часовой стрелке и против часовой стрелки.
В настоящем описании также предложена система для применения вала с целью регулировки гидравлического двигателя при проходке ствола скважины в направлении, имеющем горизонтальный компонент, где вал и гидравлический двигатель присоединены на противоположных концах бурильной колонны. В примере осуществления система включает приспособление для измерения перепада гидравлического давления в гидравлическом двигателе с одновременным управлением гидравлическим двигателем и приспособлением для регулировки ориентации торца долота гидравлического двигателя, где приспособление для регулировки ориентации торца долота включает приспособление для регулировки углового положения вала в зависимости от измеряемого перепада давления. Система может дополнительно включать приспособление для определения текущей ориентации торца долота двигателя с одновременным управлением гидравлическим двигателем, где приспособление для регулировки углового положения вала может также служить для регулировки углового положения вала в зависимости от контролируемой ориентации торца долота. Система может дополнительно включать приспособление для измерения нагрузки на долото гидравлического двигателя с одновременным управлением гидравлическим двигателем, где приспособление для регулировки углового положения вала может также служить для регулировки углового положения вала в зависимости от контролируемой нагрузки на долото. Система может дополнительно включать приспособление для определения глубины долота гидравлического двигателя в стволе скважины с одновременным управлением гидравлическим двигателем, где приспособление для регулировки углового положения вала может также служить для регулировки углового положения вала в зависимости от определяемой глубины долота. Система может дополнительно включать приспособление для измерения скорости проникновения гидравлического двигателя в ствол скважины с одновременным управлением гидравлическим двигателем, где приспособление для регулировки углового положения вала может также служить для регулировки углового положения вала в зависимости от контролируемой скорости проходки. Приспособление для регулировки ориентации торца долота может дополнительно включать приспособление для управления буровой лебедкой, которая регулирует нагрузку на долото гидравлического двигателя в зависимости от измеряемого перепада давления.
В настоящем описании также предложено устройство для применения вала с целью регулировки гидравлического двигателя при проходке ствола скважины в направлении, имеющем горизонтальный компонент, где вал и гидравлический двигатель присоединены на противоположных концах бурильной колонны. В примере осуществления устройство включает датчик давления, предназначенный для измерения перепада гидравлического давления в гидравлическом двигателе в процессе работы гидравлического двигателя, и контроллер торца долота, предназначенный для регулировки ориентации торца долота гидравлического двигателя посредством генерации сигнала управления приводом вала, который указывает двигателю вала регулировать угловое положение вала в зависимости от измеряемого перепада давления. Устройство может дополнительно включать датчик ориентации торца долота, предназначенный для определения текущей ориентации торца долота, где контроллер торца долота может служить для генерации сигнала управления приводом вала, также основанного на определяемой текущей ориентации торца долота. Устройство может дополнительно включать датчик нагрузки на долото, предназначенный для детектирования данных, характеризующих величину нагрузки на долото гидравлического двигателя, а также контроллер буровой лебедки, предназначенный для взаимодействия с контроллером торца долота при регулировке ориентации торца долота посредством генерации сигнала управления буровой лебедки, который указывает буровой лебедке управлять буровой лебедкой, где сигнал управления буровой лебедки может быть основан на измеряемой нагрузке на долото. Устройство может дополнительно включать датчик скорости проходки, предназначенный для определения скорости проходки ствола скважины, где сигнал управления буровой лебедки может быть также основан на определяемой скорости проходки.
Способы и устройство в рамках настоящего описания включают способы и устройство, направленные на автоматическое получение и/или сохранение требуемой ориентации торца долота посредством контроля параметров процесса бурения, которые ранее не применялись для автоматической ориентации торца долота и включают один или более из фактического периода давления гидравлического забойного двигателя, фактической ориентации торца долота, фактической нагрузки на долото, фактической глубины долота, фактической скорости проходки, фактического колебания вала. Примеры комбинаций указанных параметров процесса бурения, которые могут применяться согласно одному или более аспектам настоящего описания для получения и/или сохранения требуемой ориентации торца долота, включают следующее
ΔP и TF;
ΔP, TF и WOB;
ΔP, TF, WOB и ГЛУБИНУ;
ΔP и WOB;
ΔP, TF и ГЛУБИНУ;
ΔP, TF, WOB и ROP;
ΔP и ROP;
ΔP, TF и ROP;
ΔP, TF, WOB и OSC;
ΔP и ГЛУБИНУ;
ΔP, TF и OSC;
ΔP, TF, ГЛУБИНУ и ROP;
ΔP и OSC;
ΔP, WOB и ГЛУБИНУ;
ΔP, TF, ГЛУБИНУ и OSC;
TF и ROP;
ΔP, WOB и ROP;
ΔP, WOB, ГЛУБИНУ и ROP;
TF и ГЛУБИНУ;
ΔP, WOB и OSC;
ΔP, WOB, ГЛУБИНУ и OSC;
TF и OSC;
ΔP, ГЛУБИНУ и ROP;
ΔP, ГЛУБИНУ, ROP и OSC;
WOB и ГЛУБИНУ;
ΔP, ГЛУБИНУ и OSC;
ΔP, TF, WOB, ГЛУБИНУ и ROP;
WOB и OSC;
ΔP, ROP и OSC;
ΔP, TF, WOB, ГЛУБИНУ и OSC;
ROP и OSC;
ΔP, TF, WOB, ROP и OSC;
ROP и ГЛУБИНУ; и
ΔP, TF, WOB, ГЛУБИНУ, ROP и OSC;
где ΔP представляет собой фактический перепад давления гидравлического забойного двигателя, TF представляет собой фактическую ориентацию торца долота, нагрузка на долото представляет собой фактическую нагрузку на долото, глубина представляет собой фактическую глубину долота, скорость проходки представляет собой фактическую скорость проходки и OSC представляет собой фактическую частоту колебания вала, скорость, амплитуду, нейтральную точку и/или крутящий момент.
В примере осуществления обеспечивается требуемая ориентация торца долота (например, пользователем, компьютером или компьютерной программой), а устройство согласно одному или более аспектам настоящего описания затем отслеживает и управляет фактической ориентацией торца долота, как описано выше. Впрочем, при отслеживании и управлении фактической ориентацией торца долота, данные параметра операции бурения могут контролироваться с целью зафиксировать, а затем обновить в реальном времени отношение между перепадом давления гидравлического забойного двигателя и крутящим моментом долота, изменениями нагрузки на долото и крутящим моментом долота и изменениями в положении вала и фактической ориентацией торца долота, среди прочих возможных отношений в рамках настоящего описания. Затем полученная информация может использоваться для контроля фактической ориентации торца долота путем изменения одного или нескольких контролируемых параметров процесса бурения.
Таким образом, например, требуемая ориентация торца долота может быть введена пользователем, при этом ротационная приводная система согласно аспектам настоящего описания может вращать бурильную колонну до тех пор, пока контролируемая ориентация торца долота и/или другие данные параметра процесса бурения не выявят движения скважинного инструмента. Затем автоматизированное устройство настоящего описания продолжает управлять ротационным двигателем, пока не будет получена требуемая ориентация торца долота. Затем выполняют наклонно-направленное бурение. Если фактическая ориентация торца долота уходит в сторону от требуемой ориентации торца долота, что может быть указано контролируемыми данными параметра процесса бурения, роторный привод может реагировать, вращая вал и/или бурильную колонну в направлении по часовой стрелке или против часовой стрелки, согласно отношению между контролируемыми данными параметра бурения и ориентацией торца долота. Если используется режим колебаний, устройство может изменять амплитуду колебания (например, увеличивая или уменьшая часть колебаний по часовой стрелке), приводя фактическую ориентацию торца долота в соответствие с планом. Альтернативно или дополнительно система буровой лебедки может реагировать на отклонение ориентации торца долота, подавая или сматывая буровой трос, и/или может реагировать система бурового насоса, увеличивая или уменьшая перепад давления гидравлического забойного двигателя. Если фактическая ориентация торца долота отклоняется от требуемой ориентации с превышением заданного (регулируемого пользователем) предела в течение периода с более длительной, чем заданная (регулируемая пользователем), продолжительностью, то устройство может подавать звуковой и/или визуальный сигнал предупреждения. Затем оператор может позволить продолжение автоматического контроля или принять ручное управление.
Данный подход может также применяться для управления ориентацией торца долота с известной ориентацией вала до и после соединения, что позволяет сократить время, требуемое на соединение. Например, ориентация вала может контролироваться в забое при известной ориентации торца долота, нагрузке на долото и/или перепаде давления забойного двигателя. Затем могут быть установлены зажимы, и ориентация вала может регистрироваться, а затем сравниваться с вышеописанным отношением (отношениями). Затем может быть выполнено соединение, и ориентация вала может регистрироваться только перед снятием зажимов. В данной точке ориентация вала может быть возвращена к той, которая была перед соединением. Затем оператор на буровой установке или автоматизированный контроллер могут начать процедуру "автоориентации", при этом устройство может вращать вал в некоторое положение, а затем возвращать в забой. Таким образом, оператору, возможно, не потребуется ждать определения ориентации торца долота и, возможно, не потребуется возвращаться к забою наугад. Следовательно, аспекты настоящего описания могут обеспечить существенную экономию времени в ходе соединений.
Кроме того, способы в рамках настоящего описания могут быть локальными или удаленными по природе. Указанные способы, а также любые контроллеры, описанные в настоящей заявке, могут обеспечиваться одним или более интеллектуальными адаптивными контроллерами, программируемыми логическими контроллерами, искусственными нейронными сетями и/или другими адаптивными, и/или "обучающимися" контроллерами или устройствами обработки данных. Например, такие способы могут быть применены или выполнены посредством ПЛК, ПКА, ПК, одного или более серверов, настольных станций, портативных компьютеров и/или любой другой формы или типа вычислительного устройства с соответствующей способностью.
Используемый в настоящем описании термин "по существу" означает, что числовое количество находится в пределах приблизительно 20 процентов, предпочтительно в пределах приблизительно 10 процентов и более предпочтительно в пределах приблизительно 5 процентов от указанного значения. В предпочтительном варианте осуществления указанные термины относятся к количествам в пределах приблизительно 1 процента, в пределах приблизительно 0,5 процентов или даже в пределах приблизительно 0,1 процентов от указанного значения.
Термин "приблизительно", используемый в настоящем описании, в целом следует понимать, как относящийся к обоим числам в числовом диапазоне. Например, "приблизительно 1-2" следует понимать как "от приблизительно 1 до приблизительно 2". Кроме того, следует понимать, что все числовые диапазоны в настоящем описании включают каждое целое число, или 1/10 целого числа, в пределах диапазона.
Также в настоящее описание путем ссылки полностью включен каждый из следующих документов:
патент США 6,050,348 (Richarson и др.)
патент США 5,474,142 (Bowden);
патент США 5,713,422 (Dhindsa);
патент США 6,192,998 (Pinckard);
патент США 6,026,912 (King и др.);
патент США 7,059,427 (Power и др.);
патент США 6,029,951 (Guggari);
"A Real-Time Implementation of MSE", AADE-05-NTCE-66;
"Maximizing Drill Rates with Real-Time Surveillance of Mechanical Specific Energy", SPE 92194;
"Comprehensive Drill-Rate Management Process to Maximize Rate of Penetration", SPE 102210; и
"Maximizing ROP with Real-Time Analysis of Digital Data and MSE", IPTC 10607.
Выше изложены признаки нескольких вариантов осуществления, чтобы средние специалисты в данной области техники могли лучше понять аспекты настоящего описания. Средние специалисты в данной области техники должны понимать, что они могут с готовностью применить настоящее описание в качестве основы для разработки или модификации других способов и структур с целью выполнения тех же цели и/или достижения тех же преимуществ вариантов осуществления, предложенных в настоящей заявке. Средние специалисты в данной области техники также должны понимать, что такие эквивалентные толкования не отступают от сущности и объема настоящего описания, в которое они могут внести различные модификации, замены и изменения, не отступая при этом от сущности и объема настоящего описания.
Реферат
Изобретение относится к способу и системе непрерывного бурения. Техническим результатом является улучшенное управление оборудованием низа бурильной колонны (ОНБК), что приводит к улучшенному отклику ОНБК и более быстрой работе ОНБК. Способ содержит следующие стадии: получение ввода, включающего в себя заданную траекторию бурения к целевому местоположению; определение прогнозируемого местоположения оборудования низа бурильной колонны системы бурения при непрерывном бурении; сравнение прогнозируемого местоположения оборудования низа бурильной колонны с заданной траекторией бурения для определения величины отклонения; создание измененной траектории бурения к целевому местоположению, выбранной на основе величины отклонения от заданной траектории бурения; автоматическое и электронное создание одного или более сигналов управления буровой установки на поверхности скважины для направления оборудования низа бурильной колонны буровой системы к целевому местоположению по измененной траектории бурения. 3 н. и 18 з.п. ф-лы, 11 ил.
Формула
получение ввода, включающего в себя заданную траекторию бурения к целевому местоположению;
определение прогнозируемого местоположения оборудования низа бурильной колонны системы бурения при непрерывном бурении;
сравнение прогнозируемого местоположения оборудования низа бурильной колонны с заданной траекторией бурения для определения величины отклонения;
создание измененной траектории бурения к целевому местоположению, выбранной на основе величины отклонения от заданной траектории бурения;
автоматическое и электронное создание одного или более сигналов управления буровой установки на поверхности скважины для направления оборудования низа бурильной колонны буровой системы к целевому местоположению по измененной траектории бурения.
повторное определение прогнозируемого положения оборудования низа бурильной колонны буровой системы;
сравнение прогнозируемого местоположения оборудования низа бурильной колонны с новой измененной траекторией бурения;
создание с помощью электроники второй измененной траектории бурения к целевому местоположению;
автоматическое и электронное создание одного или более сигналов управления буровой установки для направления оборудования низа бурильной колонны системы бурения по второй измененной траектории бурения к целевому местоположению.
вычисление с помощью электроники первой трехмерной кривой;
вычисление с помощью электроники удерживающей секции;
необязательное вычисление с помощью электроники второй трехмерной кривой, при этом первая и необязательная вторая трехмерные кривые являются частью измененной траектории бурения, необязательная вторая трехмерная кривая соединяет измененную траекторию с исходной заданной траекторией бурения в местоположении, расположенном перед целевым местоположением.
разработка плана бурения, включающего в себя траекторию бурения и допустимый предел погрешности в виде зоны допуска при непрерывном бурении;
получение данных, характеризующих одну или более направляющих ориентировок и прогноз глубины долота;
определение фактического местоположения оборудования низа бурильной колонны на основе одной или более направляющих ориентировок и прогноза глубины долота;
определение нахождения бурового долота в пределах зоны допуска;
сравнение фактического местоположения оборудования низа бурильной колонны с заданной траекторией бурения для определения уровня отклонения оборудования низа бурильной колонны от фактической траектории бурения;
создание измененной траектории бурения на основании величины отклонения, включающее в себя создание измененной траектории бурения, которая пересекает заданную траекторию бурения, если уровень отклонения превышает первую пороговую величину отклонения, и создание измененной траектории бурения к целевому местоположению, которое не пересекает заданную траекторию бурения, если уровень отклонения превышает вторую пороговую величину отклонения;
определение требуемой ориентации торца долота для направления оборудования низа бурильной колонны по измененной траектории бурения;
автоматическое и электронное создание одного или более сигналов управления буровой установки в контроллере управления движением;
подача одного или более сигналов управления буровой лебедке и верхнему приводу для направления оборудования низа бурильной колонны по измененной траектории бурения.
Комментарии