Устройство эндоскопического зонда для оптической когерентной томографии - RU184084U1
Код документа: RU184084U1
Чертежи
Описание
Предлагаемое техническое решение (полезная модель) относится к области катетеров и полых зондов и может быть использовано в медицине и ветеринарии для проведения диагностики в полостях и трактах организма, а также в физике для исследования или анализа материалов с помощью оптических средств.
Видеоэндоскоп позволяет получать качественные изображения слизистых оболочек полых внутренних органов человека, что имеет значительную диагностическую ценность. Тем не менее, для постановки корректного диагноза целесообразным является получение дополнительной информации о внутреннем строении найденной патологии. Такую информацию может дать биопсия, в большинстве случаев являющаяся инвазивной и болезненной для пациента процедурой. Безболезненной альтернативой биопсии служит эндоскопическая оптическая когерентная томография, объединяющая в себе сильные стороны эндоскопии (возможность исследовать полые внутренние органы и тракты) и оптической когерентной томографии (возможность получать изображения внутренней структуры исследуемого объекта с микронным пространственным разрешением на глубину до 2.5 миллиметров). Отличием эндоскопического оптического когерентного томографа от традиционного является конструкция эндоскопического зонда, являющегося выносным, сменным плечом образца этого томографа.
По патенту US 20110009752 А1, МПК А61В 1/267, А61В 6/00 и А61В 1/07, опубл. 13.01.2011 г. известны система эндоскопической оптической когерентной томографии в частотной области с перестраиваемым источником излучения с широким динамическим диапазоном длин волн, эндоскопический зонд для этой системы и способ трехмерной анатомической визуализации дыхательных путей. Эндоскопический зонд для системы эндоскопической оптической когерентной томографии в частотной области с перестраиваемым источником излучения с широким динамическим диапазоном длин волн содержит: полую удлиненную гибкую оболочку с дистальным и проксимальным концом, оптическое волокно, протянутое от проксимального к дистальному концу, линзу с градиентным показателем преломления, соединенную с оптическим волокном, микроэлектромеханическую систему с выходным валом, расположенную рядом с дистальным концом, контроллер, соединенный с микроэлектромеханической системой, гибкий управляющий провод, соединяющий микроэлектромеханическую систему и контроллер, и проходящий через полую удлиненную гибкую оболочку от ее проксимального конца к микроэлектромеханической системе, сканирующее зеркало, соединенное с выходным валом микроэлектромеханической системы и отражающее пучок излучения, фокусируемый линзой с градиентным показателем преломления. Известны варианты эндоскопического зонда для системы эндоскопической оптической когерентной томографии в частотной области с перестраиваемым источником излучения с широким динамическим диапазоном длин волн дополнительно содержащие: дополнительный внешний контроллер (для более эффективного управления процессом сканирования); прокладку в виде стеклянного стержня между оптическим волокном и линзой с градиентным показателем преломления (для уменьшения отражения от поверхности линзы с градиентным показателем преломления); соединенный с оболочкой столик поступательного движения (для обеспечения точного контролируемого продольного смещения полой удлиненной гибкой оболочки).
Система эндоскопической оптической когерентной томографии в частотной области с перестраиваемым источником излучения с широким динамическим диапазоном длин волн и эндоскопический зонд для этой системы предназначены для быстрой трехмерной анатомической визуализации дыхательных путей во время обструктивного апноэ сна. Техническим результатом использования системы и эндоскопического зонда являются непрерывность отображения анатомии верхних дыхательных путей.
Недостатком системы эндоскопической оптической когерентной томографии в частотной области с перестраиваемым источником излучения с широким динамическим диапазоном длин волн и эндоскопического зонда для этой системы является низкая точность позиционирования эндоскопического зонда в исследуемом биологическом объекте или его части.
По патенту US 9574870 В2, МПК А61В 5/00, G01B 9/02, G02B 6/26, опубл. 21.02.2017 г. известен зонд для получения оптических изображений содержащий: неподвижное оптическое волокно, жестко закрепленное в трубчатый катетер, первый блок изменения оптического пути, расположенный рядом с наконечником неподвижного оптического волокна и приводимый в движение первым двигателем для вращения таким образом, чтобы направлять оптическое излучение радиально, вращающееся оптическое волокно, расположенное между неподвижным оптическим волокном и первым блоком изменения оптического пути, оптически связанное с вращающимся оптическим соединителем и приводимое в движение вторым двигателем для вращения, второй блок изменения оптического пути, расположенный таким образом, чтобы путем наклона оптического пути к наконечнику вращающегося оптического волокна на минутный угол относительно центра вращения испускать излучение при вращении, причем неподвижное оптическое волокно, первый блок изменения оптического пути, вращающееся оптическое волокно и второй блок изменения оптического пути лежат на одной прямой. Известны варианты зонда для получения оптических изображений, в которых: вращающийся вал первого двигателя имеет полый профиль, причем первый блок изменения оптического пути закреплен на нем, а вращающееся оптическое волокно при вращении проникает в полость вращающегося вала первого двигателя, вращающийся вал второго двигателя также имеет полый профиль, причем вращающееся оптическое волокно расположено в его полости; первый блок изменения оптического пути закреплен на вращающемся вале первого двигателя, причем вращающийся вал расположен ближе к наконечнику неподвижного оптического волокна относительно первого блока изменения оптического пути, вращающийся вал второго двигателя также имеет полый профиль, причем вращающееся оптическое волокно расположено в его полости; по меньшей мере, один из двигателей устройства является ультразвуковым; скорость вращения первого и второго двигателей одинаковая.
Зонд для получения оптических изображений предназначен к использованию в эндоскопической оптической когерентной томографии, в частности для получения трехмерных изображений исследуемого биологического объекта или его части с высоким пространственным разрешением. Техническим результатом использования зонда для получения оптических изображений является уменьшение потерь крутящего момента и задержек при передаче вращения.
Недостатком зонда для получения оптических изображений является низкая точность его позиционирования в исследуемом биологическом объекте или его части.
Ближайшим аналогом (прототипом) разработанной полезной модели является волоконно-оптический зонд к устройству низкокогерентной интерферометрии в частотной области для получения обратно рассеянного излучения (US 8860945 В2, МПК G01B 9/02, G01J 3/45, G01N 21/31, А61В 5/00 и G01N 21/47, опубл. 14.10.2014 г. ), содержащий: оптический элемент с оптической осью, приемно-выводное волокно, волоконный жгут (приемник расслоенного пучка), включающий в себя множество оптических волокон и имеющий проксимальный и дистальный конец, причем дистальный конец волоконного жгута расположен в фокусном расстоянии от оптического элемента с оптической осью, а приемно-выводное волокно является одномодовым и смещено относительно оптической оси оптического элемента таким образом, чтобы пучок излучения, падающий на исследуемый образец перемещался от приемно-выводного волокна через оптический элемент с оптической осью под углом относительно этой оси, волоконный жгут выполнен таким образом, чтобы принимать пучок рассеянного от исследуемого объекта излучения на множество оптических волокон, получая угловое распределение рассеянного пучка по аналогии с результатом Фурье-преобразования. Известны варианты волоконно-оптического зонда, в которых: оптический элемент с оптической осью представляет собой преломляющий оптический элемент, отражающий оптический элемент или их комбинацию; дополнительно содержится прозрачная оболочка, позволяющая размещать исследуемый объект в передней фокальной плоскости оптического элемента с оптической осью; угловое распределение рассеянного пучка приближенно составляет 30°; приемно-выводное волокно является поляризационно-стабилизированным волокном.
Волоконно-оптический зонд к устройству низкокогерентной интерферометрии в частотной области предназначен для получения диагностической информации in vivo, с высокой скоростью и в режиме одиночного сканирования. Техническим результатом использования волоконно-оптического зонда является повышение быстродействия. Время, затрачиваемое на получение структурного изображения исследуемого объекта, в среднем снижено до 40 миллисекунд.
Недостатком волоконно-оптического зонда к устройству низкокогерентной интерферометрии в частотной области для получения обратно рассеянного излучения является низкая точность позиционирования этого эндоскопического зонда в исследуемом объекте.
Технической задачей полезной модели является повышение точности позиционирования катетера эндоскопического зонда в исследуемом биологическом объекте или его части, за счет получения дополнительной информации об угловой скорости и ускорении по всем координатным осям при движении катетера эндоскопического зонда во время проведения диагностического исследования.
Поставленная техническая задача достигается тем, что в устройстве эндоскопического зонда для оптической когерентной томографии, так же, как и в устройстве, которое является ближайшим аналогом, содержатся преломляющий оптический элемент с оптической осью, приемно-выводное волокно, волоконный жгут, включающий в себя множество оптических волокон и имеющий проксимальный и дистальный конец, причем дистальный конец волоконного жгута расположен в фокусном расстоянии от преломляющего оптического элемента с оптической осью, а приемно-выводное волокно является одномодовым и смещено относительно оптической оси преломляющего оптического элемента таким образом, чтобы пучок излучения, падающий на исследуемый объект перемещался от приемно-выводного волокна через преломляющий оптический элемент с оптической осью под углом относительно этой оси, волоконный жгут выполнен таким образом, чтобы принимать пучок рассеянного от исследуемого объекта излучения на множество оптических волокон, получая угловое распределение рассеянного пучка по аналогии с результатом Фурье-преобразования, причем для размещения исследуемого объекта в передней фокальной плоскости преломляющего оптического элемента с оптической осью используется прозрачная оболочка.
Новым в разработанном устройстве эндоскопического зонда для оптической когерентной томографии является то, что преломляющим оптическим элементом с оптической осью служит фокусирующая линза, одномодовое приемно-выводное волокно находится в оптической связи с оптическим разветвителем, который в свою очередь посредством первого одномодового оптического волокна соединен с коллиматором, причем коллиматор оптически связан с фокусирующей линзой, которая жестко сочленена с дистальным концом волоконного жгута и прозрачной оболочкой таким образом, чтобы всегда находиться на фокусном расстоянии от дистального конца волоконного жгута и одновременно располагаться на внутренней границе прозрачной оболочки, оптический разветвитель посредством второго одномодового оптического волокна оптически связан с оптическим триггером, который в свою очередь электрически связан с микроэлектромеханическим гироскопом и микроэлектромеханическим акселерометром, которые электрически связаны с цифровым сигнальным процессором, причем микроэлектромеханический гироскоп и микроэлектромеханический акселерометр выполнены таким образом, чтобы формировать электрические сигналы об угловой скорости и ускорении, с которыми соответственно движется катетер эндоскопического зонда при проведении диагностического исследования, а цифровой сигнальный процессор выполнен так, чтобы обрабатывать эти электрические сигналы и тем самым вычислять пространственные координаты катетера эндоскопического зонда, цифровой сигнальный процессор электрически связан с коннектором эндоскопического зонда, а приемно-выводное волокно и волоконный жгут связаны с этим коннектором оптически, причем электрические и оптические связи с коннектором эндоскопического зонда проходят через гибкую часть эндоскопического зонда и сформированы таким образом, чтобы обеспечить сменность эндоскопических зондов у оптического когерентного томографа.
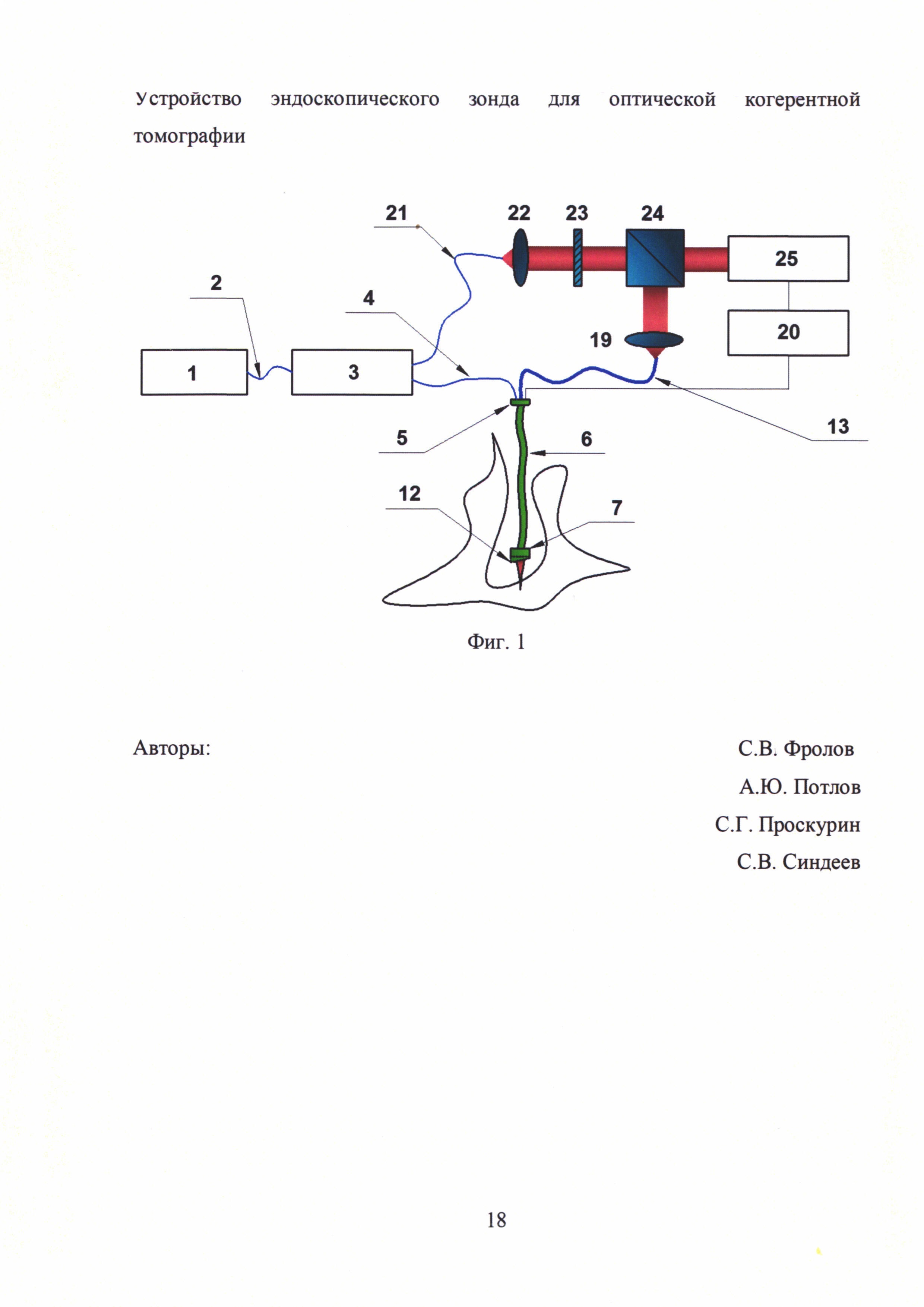
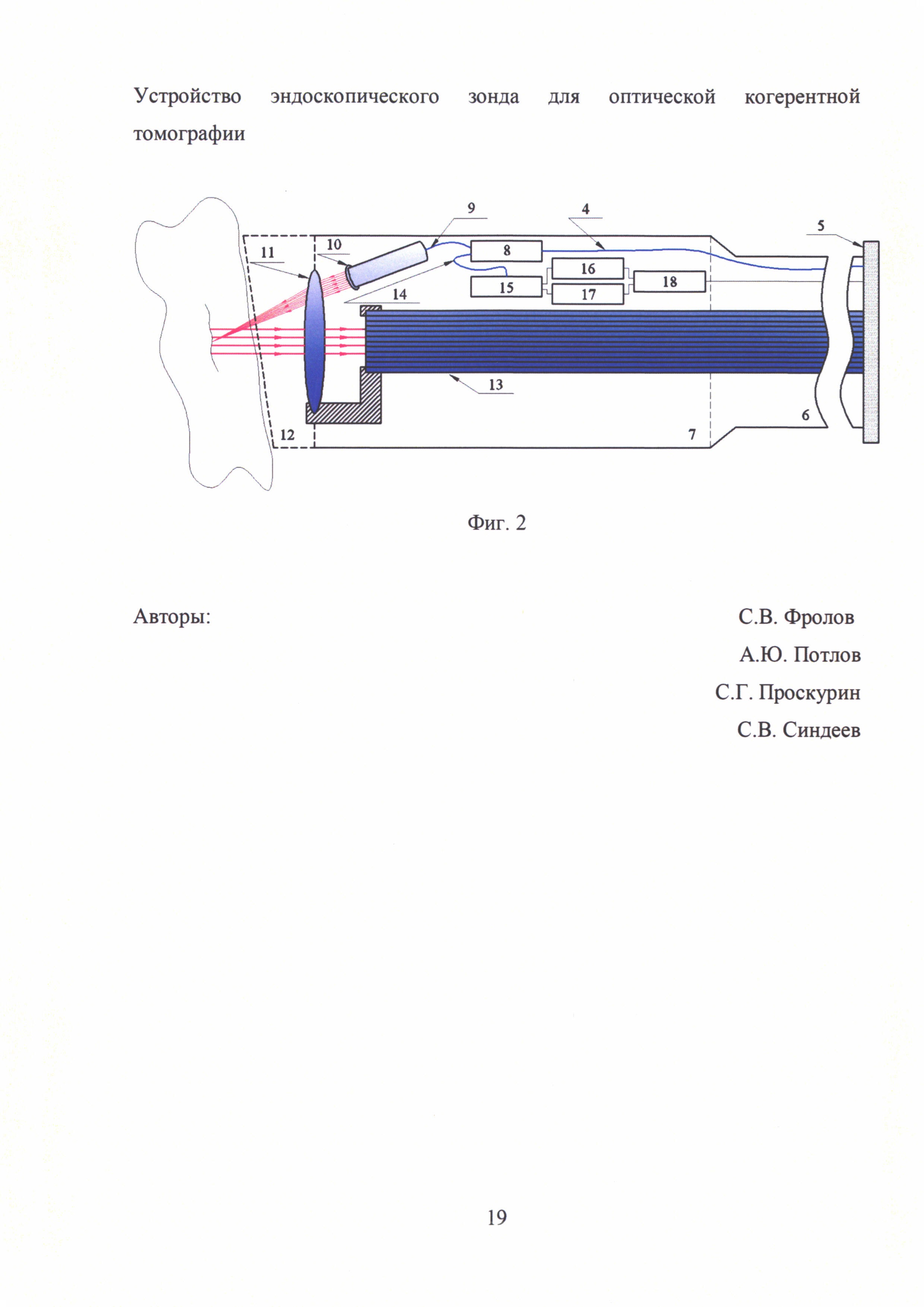
На фиг. 1 представлена обобщенная схема устройства эндоскопической оптической когерентной томографии, которое может использовать разработанную полезную модель в качестве выносного, сменного плеча образца, т.е. в качестве эндоскопического зонда. На фиг. 2 представлена схема реализации разработанного устройства эндоскопического зонда для оптической когерентной томографии в соответствии с формулой полезной модели. Перечень элементов на этих фигурах: 1 - источник излучения, 2 - одномодовое оптическое волокно источника излучения, 3 - оптический разветвитель источника излучения, 4 - приемно-выводное волокно, 5 - коннектор эндоскопического зонда, 6 - гибкая часть эндоскопического зонда, 7 - катетер эндоскопического зонда, 8 - оптический разветвитель, 9 - первое одномодовое оптическое волокно, 10 - коллиматор, 11 - фокусирующая линза, 12 - прозрачная оболочка, 13 - волоконный жгут, 14 - второе одномодовое оптическое волокно, 15 - оптический триггер, 16 - микроэлектромеханический гироскоп, 17 - микроэлектромеханический акселерометр, 18 - цифровой сигнальный процессор, 19 - фокусирующая линза плеча образца, 20 - блок вычислений и формирования томографического изображения, 21 - одномодовое оптическое волокно опорного плеча, 22 - фокусирующая линза опорного плеча, 23 - нейтральный фильтр, 24 - оптический смеситель, 25 - спектрометр.
Для удобства понимания принципа работы полезной модели, рассмотрим схемы по фиг. 1 и фиг. 2 совместно. Излучение источника излучения (1) (например, суперлюминесцентного диода) устройства эндоскопической оптической когерентной томографии по фиг. 1 с помощью одномодового оптического волокна источника излучения (2) направляется в оптический разветвитель источника излучения (3), где делится на два пучка, причем в неравной пропорции. Большая часть излучения (например, 90% излучения источника излучения) посредством приемно-выводного волокна (4) направляется в плечо образца, а оставшаяся излучение (в конкретном примере, 10% излучения источника излучения) поступает в опорное плечо.
В плече образца, т.е. в эндоскопическом зонде по фиг. 2 излучение из приемного-выводного волокна (4) через коннектор эндоскопического зонда (5) и гибкую часть эндоскопического зонда (6) проходит в катетер эндоскопического зонда (7), где делится на две части с помощью оптического разветвителя (8). Большая часть излучения (например, 99% излучения приемно-выводного волокна) посредством первого одномодового оптического волокна (9) поступает в коллиматор (10), где преобразуется в параллельные лучи. Эти лучи фокусируются на исследуемом биологическом объекте или его части краем фокусирующей линзы (11) сквозь внешнюю границу прозрачной оболочки (12). Рассеянное назад и обратно отраженное от исследуемого биологического объекта излучение сквозь внешнюю границу прозрачной оболочки (12) обратно поступает на фокусирующую линзу (11). Посредством этой линзы излучение направляется на волоконный жгут (13), на котором при этом формируется угловое распределение рассеянного пучка.
Одновременно с вышеуказанными действиями вторая часть излучения с оптического разветвителя (8) (в конкретном примере 1% излучения приемно-выводного волокна) посредством второго одномодового оптического волокна (14) поступает в оптический триггер (15), где формируется электрический сигнал, запускающий микроэлектромеханический гироскоп (16) и микроэлектромеханический акселерометр (17). Эти блоки отслеживают изменения положения катетера эндоскопического зонда (7) в пространстве. Цифровой сигнальный процессор (18) обрабатывает данные об угловой скорости (цифровой сигнал микроэлектромеханического гироскопа) и ускорении (цифровой сигнал микроэлектромеханического акселерометра) по всем координатным осям и тем самым находит пространственные координаты катетера эндоскопического зонда.
С помощью волоконного жгута (13) рассеянное назад и обратно отраженное от исследуемого биологического объекта или его части излучение направляется из катетера эндоскопического зонда (7) через гибкую часть эндоскопического зонда (6) и коннектор эндоскопического зонда (5) обратно в устройство эндоскопической оптической когерентной томографии (обобщенная схема которого представлена на фиг. 1), в частности на фокусирующую линзу плеча образца (19). Электрический сигнал с цифрового сигнального процессора (18) (координаты катетера эндоскопического зонда) по аналогии с оптическим сигналом, также поступает в устройство эндоскопической оптической когерентной томографии, в частности на блок вычислений и формирования томографического изображения (20).
Вторая часть излучения (10% излучения источника излучения) с оптического разветвителя источника излучения (3) устройства по фиг.1 посредством одномодового оптического волокна опорного плеча (21) поступает на фокусирующую линзу опорного плеча (22), с помощью которой это излучение направляется на нейтральный фильтр (23). Этот фильтр уменьшает световой поток в опорном плече до уровня, необходимого для последующей интерференции пучков излучения из опорного плеча и плеча образца на оптическом смесителе (24). Излучение из оптического смесителя (24) направляется в спектрометр (25), где пространственное распределение интенсивности суммарного оптического поля регистрируется и передается в виде электрического сигнала в блок вычислений и формирования томографического изображения (20). Далее оцифрованный интерференционный сигнал обрабатывается блоком вычислений и формирования томографического изображения (20) (алгоритмы обработки интерференционного сигнала обязательная часть любого устройства оптической когерентной томографии) с учетом пространственных координат катетера эндоскопического зонда (7), полученных от цифрового сигнального процессора (18), при этом формируется двухмерное томографическое изображение оптической структуры исследуемого биологического объекта или его части для известной в пространственном смысле области сканирования. Пользователь смещает эндоскопический зонд внутри исследуемого биологического объекта или его части, все вышеуказанные действия повторяются, и как результат формируется двухмерное томографическое изображение оптической структуры для другой известной в пространственном смысле области сканирования. Совокупность двухмерных томографических изображений для множества известных точек пространства внутри исследуемого биологического объекта или его части может быть использована для трехмерной реконструкции оптического строения исследуемого объекта, если конкретное устройство эндоскопической оптической когерентной томографии обладает такой функцией (соответствующие алгоритмы есть не у всех устройств оптической когерентной томографии).
Наиболее важной отличительной особенностью предложенной полезной модели является наличие в ней микроэлектромеханического гироскопа, микроэлектромеханического акселерометра и цифрового сигнального процессора. Целесообразность использования этих блоков в эндоскопическом зонде для оптической когерентной томографии заключается в том, что: микроэлектромеханический гироскоп определяет угловую скорость движения катетера эндоскопического зонда при проведении диагностического исследования, микроэлектромеханический акселерометр определяет его ускорение, а цифровой сигнальный процессор обрабатывает эти данные по всем трем координатным осям и тем самым определяет пространственное положение катетера эндоскопического зонда и отслеживает его изменение. Актуальные сведения о координатах катетера эндоскопического зонда повышают точность позиционирования эндоскопического зонда в исследуемом биологическом объекте или его части, что положительно сказывается на диагностической ценности эндоскопической оптической когерентной томографии (построение трехмерных анатомических структурных изображений исследуемого биологического объекта или его части, привязка найденных патологий к координатной сетке и т.п.).
Другой заявленной отличительной особенностью полезной модели является использование оптического разветвителя и оптического триггера для запуска микроэлектромеханического гироскопа и микроэлектромеханического акселерометра. Эти оптические элементы позволяют синхронизировать работу микроэлектромеханического гироскопа и микроэлектромеханического акселерометра между собой, а также синхронизировать процесс сканирования исследуемого биологического объекта или его отдельной части и процесс вычисления пространственных координат катетера эндоскопического зонда. Поскольку время срабатывания современных оптических триггеров составляет менее 1 не. задержка в определении пространственного положения и изменений этого положения для катетера эндоскопического зонда будет относительно небольшой (зависящей от быстродействия цифрового сигнального процессора), что также способствует повышению точности позиционирования эндоскопического зонда в исследуемом биологическом объекте или его отдельной части.
Также следует отметить, что жесткое сочленение фокусирующей линзы, прозрачной оболочки катетера эндоскопического зонда и волоконного жгута делают катетер эндоскопического зонда более прочным и устойчивым при движении, что упрощает и делает более точным его позиционирование в исследуемом биологическом объекте или его отдельной части.
Использование специального коннектора для обеспечения оптической и электрической связи между эндоскопическим зондом и устройством оптической когерентной томографии обеспечивает быструю смену эндоскопических зондов, что позволяет подбирать эндоскопический зонд с оптимальными характеристиками (длина, толщина, гибкость и т.п.) для конкретного диагностического исследования, что также упрощает и делает более точным позиционирование этого зонда в исследуемом биологическом объекте или его части.
В конкретной реализации разработанного устройства эндоскопического зонда для оптической когерентной томографии и устройства эндоскопической оптической когерентной томографии (не вынесено в формулу полезной модели, но необходимо для проверки работоспособности эндоскопического зонда) в качестве одномодового приемно-выводного волокна и одномодовых оптических волокон между источником излучения и оптическим разветвителем, оптическим разветвителем и фокусирующей линзой, коллиматором и оптическим разветвителем, а также оптическим разветвителем и оптическим триггером использованы одномодовые световоды P3-980A-FC-2. В качестве составных частей волоконного жгута использованы многомодовые оптические кабели BF13LSMA. В качестве фокусирующих линз использованы двояковыпуклые линзы LB1157-C и LB1757, в качестве коллиматора - волоконный коллиматор F240FC-C, в качестве оптических разветвителей - широкополосный оптический делитель в пропорции 90:10% TW1300R2A1 и широкополосный оптический делитель в пропорции 99:1% TW1300R1A1, в качестве оптического триггера - InGaAs фотодиод FGA01, в качестве нейтрального фильтра - неселективный фильтр с антибликовым покрытием NENIR10A-C. Вместо оптического смесителя применен сверхбыстрый светоделитель/светосумматор с заданной дисперсией групповой задержки UFBS5050. Все вышеуказанные комплектующие производства фирмы «Thorlabs» (США). Вместо микроэлектромеханического гироскопа, микроэлектромеханического акселерометра и цифрового сигнального процессора использован 6-и осевой цифровой инерциальный измерительный модуль FIS1100 со встроенными буфером данных и специальным вычислительным ядром фирмы Fairchild Semiconductor (США). В качестве источника излучения использован суперлюминесцентный диод SLD-56-HP фирмы «Superlum» (Россия), в качестве спектрометра использован модуль РРО-ОСТ (Р&Р Optica, Канада). В качестве блока вычислений и формирования томографического изображения применен ноутбук Toshiba Satellite С670-14К с процессором Intel Core i3-2310M и оперативной памятью SO-DIMM DDR3 объемом 3 Гб.
Важно отметить, что конструктивные особенности устройства эндоскопической оптической когерентной томографии не вынесены в формулу полезной модели, так как эндоскопическая оптическая когерентная томография для удобства проведения диагностических исследований предусматривает сменность эндоскопических зондов, т.е. эндоскопический зонд воспринимается как независимое устройство. К тому же один и тот же эндоскопический зонд теоретически может подходить не только для одного конкретного эндоскопического оптического когерентного томографа, а для целой- группы подобных устройств, отличающихся, например, источником излучения (суперлюминесцентный диод, перестраиваемый лазер, генератор суперконтинуума на фотонных кристаллах и т.п.) или областью применения (диагностика желудочно-кишечного тракта, диагностика атеросклеротических поражений стенок кровеносных сосудов, контроль над ротационной атерэктомией и т.п.).
Таким образом, использование микроэлектромеханического гироскопа, микроэлектромеханического акселерометра, цифрового сигнального процессора, элементов оптической синхронизации (оптический разветвитель и оптический триггер), а также более прочная конструкция катетера эндоскопического зонда и специальный коннектор для быстрой смены эндоскопических зондов повышают точность позиционирования эндоскопического зонда в исследуемом биологическом объекте или его части. В конкретной реализации повышение точности позиционирования составило 28% по сравнению с прототипом, что свидетельствует о выполнении поставленной технической задачи.
Предлагаемое устройство эндоскопического зонда для оптической когерентной томографии может использоваться совместно с устройствами эндоскопической оптической когерентной томографии в качестве выносного, сменного плеча образца в следующих сферах деятельности человека: в медицине и ветеринарии для проведения диагностики состояния полостей и трактов организма (диагностика сердечно-сосудистой системы, дыхательных путей, желудочно-кишечного тракта и т.п.); в фармацевтике для контроля над качеством лекарственной продукции, а также в физике для неразрушающего контроля над качеством интегральных схем, микроэлектромеханических систем, жидкокристаллических дисплеев, пластмассовых деталей, особенно если они находятся внутри сложных изделий.
Реферат
Предлагаемое техническое решение (полезная модель) относится к области катетеров и полых зондов и может быть использовано в медицине и ветеринарии для проведения диагностики в полостях и трактах организма, а также в физике для исследования или анализа материалов с помощью оптических средств.Технической задачей полезной модели является повышение точности позиционирования катетера эндоскопического зонда в исследуемом биологическом объекте или его части за счет получения дополнительной информации об угловой скорости и ускорении по всем координатным осям при движении катетера эндоскопического зонда во время проведения диагностического исследования.Поставленная техническая задача достигается тем, что в устройстве эндоскопического зонда для оптической когерентной томографии используются микроэлектромеханический гироскоп, микроэлектромеханический акселерометр, цифровой сигнальный процессор и элементы оптической синхронизации (оптический разветвитель и оптический триггер). Эти элементы наряду с более прочной конструкцией катетера эндоскопического зонда и специальным коннектором для быстрой смены эндоскопических зондов повышают точность позиционирования эндоскопического зонда в исследуемом биологическом объекте или его части. В конкретной реализации повышение точности позиционирования составило 28% по сравнению с прототипом, что свидетельствует о выполнении поставленной технической задачи.
Формула
Документы, цитированные в отчёте о поиске
Оптически когерентная томография и освещение с использованием общего источника освещения
Комментарии