Установка бурения по породе и способ ее позиционирования - RU2521448C1
Код документа: RU2521448C1
Чертежи



Описание
Предпосылки создания изобретения
Настоящее изобретение относится к способу позиционирования установки бурения по породе. Для бурения установку бурения по породе передвигают к месту бурения. Во время позиционирования установку перемещают исключительно посредством электроприводного оборудования без двигателя внутреннего сгорания. Необходимый крутящий момент создается приводным электродвигателем, управляемым управляющим устройством. От приводного двигателя крутящий момент передается по передаточному соединению к ведущим колесам.
Настоящее изобретение также относится к установке бурения по породе.
Область техники, к которой относится изобретение, описывается более подробно в преамбулах независимых пунктов формулы изобретения.
В шахтах установки бурения по породе используют для бурения шпуров на запланированных местах бурения. При осуществлении бурения шпуров шахтное транспортное средство перемещают на следующее место бурения для бурения шпуров с веерным расположением. В частности, в подземных шахтах предпочтительно осуществлять движение при транспортировке установки с одного места на другое с помощью энергии, создаваемой электродвигателем. Энергия, необходимая для движения при транспортировке с одного места на другое, может сохраняться в батарее. Точное позиционирование на месте бурения часто является трудоемкой процедурой. Задача дополнительно усложняется тем, что грунт может быть неровным на месте бурения, а место бурения может быть узким туннелем. Трудно передвигать известные установки бурения по породе на местах бурения, поскольку их приводное оборудование плохо приспособлено для точного позиционирования.
Краткое описание изобретения
Цель настоящего изобретения заключается в создании новой и усовершенствованной установки бурения по породе и способа ее позиционирования.
Способ изобретения отличается передачей вращательного движения приводного двигателя по механическому передаточному соединению с противоскольжением к ведущему колесу, поддержанием постоянного отношения между скоростью вращения приводного двигателя и скоростью вращения ведущего колеса во время позиционирования и использованием только приводного электродвигателя для перемещения и остановки установки бурения по породе во время позиционирования.
Установка бурения по породе согласно изобретению отличается тем, что между приводным электродвигателем и ведущим колесом расположено механическое передаточное соединение с противоскольжением и установка содержит, по меньшей мере, одно измерительное устройство для определения скорости установки, и управляющий блок имеет алгоритм управления, в соответствии с которым он адаптирован для регулирования приводного электродвигателя посредством управляющего устройства так, чтобы отношение между скоростью и запросом скорости оставалось постоянным.
Идея заключается в том, что крутящий момент передается от приводного двигателя по механическому передаточному соединению с противоскольжением к ведущим колесам. В дополнение к этому скорость вращения приводного двигателя регулируется во время позиционирования так, что его скорость вращения относительно скорости вращения ведущего колеса остается постоянной. Установку бурения по породе перемещают к назначенному месту позиционирования и останавливают на нем, управляя вращением приводного двигателя.
Одно преимущество заключается в том, что установку бурения по породе можно точно позиционировать на месте позиционирования, и это означает, что, наряду с прочим, навигация является безотказной и быстрой. В дополнение к этому движение и остановка установки бурения по породе контролируются, поскольку предусматривается, что они осуществляются приводным двигателем. Улучшенный контроль перемещения повышает безопасность, снижает возможность возникновения столкновения и появления следов от ударов и также делает позиционирование более удобным и легким для оператора.
Идея варианта осуществления заключается в использовании только приводного электродвигателя для перемещения и остановки установки бурения по породе во время позиционирования. В таком случае отсутствует необходимость использования основных тормозов установки бурения по породе, которые обычно находятся в соединении с колесами. Благодаря этому осуществлению позиционирование легче контролировать, поскольку перемещением и остановкой можно управлять без использования отдельного тормоза. Во время позиционирования оператору необходимо использовать только один элемент управления. В дополнение к этому уменьшаются нагрузка на основные тормоза и необходимость в техническом обслуживании. Вместо основных тормозов, которые основаны на силах трения, в этом осуществлении во время торможения используется крутящий момент приводного двигателя.
Идея варианта осуществления заключается в использовании приводного электродвигателя для удержания на месте установки бурения по породе. В таком случае нет необходимости использовать основные тормоза установки бурения по породе и их функцию стояночного тормоза для удержания установки на месте. Благодаря этому осуществлению легче удерживать установку, позиционируемую на месте, поскольку это можно делать без использования тормозов. Оператор не нуждается в каком-либо отдельном стояночном тормозе, а приводной электродвигатель действует как стояночный тормоз и автоматически удерживает установку на месте, когда значение запроса скорости, передаваемого к приводному двигателю, равно нулю. В дополнение к этому уменьшаются нагрузка на обычные стояночные тормоза и необходимость в техническом обслуживании.
Идея варианта осуществления заключается в бесступенчатом управлении вращением приводного электродвигателя посредством, по меньшей мере, одного преобразователя частоты. При наличии преобразователя частоты электродвигателем можно управлять так, что перемещение установки бурения по породе будет предотвращаться, когда она является неподвижной. Кроме того, например, при движении на неровном грунте и прохождении препятствий установка бурения по породе остается устойчивой при движении, поскольку скорость вращения и крутящий момент приводного двигателя могут управляться преобразователем частоты так, что будет предотвращаться любое неожиданное неконтролируемое перемещение при движении в прямом направлении и обратном направлении.
Идея варианта осуществления заключается в измерении вращения, по меньшей мере, одного компонента в приводном оборудовании, по меньшей мере, одним датчиком. Расстояние, проходимое установкой бурения по породе, определяется на основании этой информации об измерении и размера ведущего колеса. Информация о расстоянии может отображаться для оператора на пользовательском интерфейсе управляющего блока установки бурения по породе. Оператор вручную вводит в пользовательский интерфейс значение расстояния, которое представляет новое место назначения для позиционирования. После этого управляющий блок передвигает установку бурения по породе к введенному новому месту назначения. Эта особенность значительно облегчает работу оператора и повышает точность позиционирования. Обычно установка бурения по породе должна быть точно позиционирована на месте бурения, чтобы шпуры можно было пробуривать в соответствии с заданной схемой расположения шпуров. Местоположение установки бурения по породе может быть определено до навигации и начала бурения измерительным устройством, таким как лазер с туннельной инжекцией. Когда результаты измерения показывают, что установку бурения по породе необходимо еще переместить на определенное расстояние вперед, например на 50 см, оператор просто вводит значение этого расстояния в управляющий блок, который при наличии принятой команды на управление автоматически передвигает установку бурения по породе на новое место.
Идея варианта осуществления заключается в задании в управляющий блок наибольшей допустимой скорости для движения установки при позиционировании. Управляющий блок следит за тем, чтобы скорость движения установки всегда оставалась ниже заданной максимальной скорости. Этим осуществлением повышается безопасность.
Идея варианта осуществления заключается в задании в управляющем блоке диапазона скоростей для движения при позиционировании. Управляющий блок следит за тем, чтобы скорость движения установки всегда оставалась в пределах заданного диапазона скоростей.
Идея варианта осуществления заключается в том, что установку бурения по породе позиционируют на месте бурения в случае неровной поверхности движения. Вследствие неровной поверхности движения силы, которые пытаются влиять на вращение колес, направлены к ведущим колесам. Однако во время позиционирования скорость вращения приводного двигателя поддерживается, по существу, постоянной относительно запроса скорости независимо от того, что изменения крутящей нагрузки направлены к ведущим колесам.
Идея варианта осуществления заключается в том, что установку бурения по породе позиционируют на месте бурения в случае наклонной поверхности движения в направлении движения установки бурения по породе. Вследствие движения на подъеме и под уклон силы, которые пытаются влиять на вращение колес, направлены к ведущим колесам. Однако во время позиционирования скорость вращения приводного двигателя поддерживается, по существу, постоянной относительно запроса скорости независимо от того, что изменения крутящей нагрузки направлены к ведущим колесам.
Идея варианта осуществления заключается в том, что пользовательский интерфейс управляющего блока имеет, по меньшей мере, один элемент ручного управления для выдачи вручную в управляющий блок запроса расстояния перемещения с одного места на другое. Управляющий блок управляет приводным двигателем для реализации заданного перемещения с одного места на другое.
Идея варианта настоящего осуществления заключается в том, что пользовательский интерфейс управляющего блока имеет, по меньшей мере, один элемент ручного управления, с помощью которого значение расстояния перемещения с одного места на другое задают заранее. В одном случае использования такой элемент управления вызывает фактическое перемещение установки бурения по породе с одного места на другое в зависимости от значения расстояния, задаваемого заранее указанным элементом управления. Пользовательский интерфейс может иметь, например, нажимную кнопку, и одним нажатием кнопки выдают значение расстояния определенной величины на управляющий блок. При наличии элемента управления такого вида оператору очень просто выдавать значение расстояния перемещения с одного места на другое. Пользовательский интерфейс может иметь дисплейное устройство, на котором показывается величина значения вводимого расстояния. Кроме того, пользовательский элемент может иметь несколько элементов управления с особым значением расстояния в каждом из них.
Идея варианта осуществления заключается в том, что управляющий блок содержит, по меньшей мере, два выбираемых диапазона скоростей. Оператор может выбирать диапазон скоростей, подлежащий использованию, в пользовательском интерфейсе управляющего блока. Первый диапазон скоростей может предназначаться для движений при транспортировке установки между местами бурения, а второй диапазон скоростей может предназначаться для медленных движений при позиционировании установки на месте бурения.
Идея варианта осуществления заключается в том, что управляющий блок распознает наибольшую допустимую скорость для движения на, по меньшей мере, одном участке шахты. Управляющий блок учитывает местоположение установки бурения по породе и элемент данных о максимальной скорости, в котором задана наибольшая допустимая скорость установки на, по меньшей мере, одном участке шахты. Когда установка бурения по породе движется по шахте, он может автоматически учитывать любые заданные пределы скорости, установленные для различных участков. В дополнение к этому в центре управления шахты элементы данных о скорости могут изменяться, например, в зависимости от условий или изменений интенсивности движения.
Идея варианта осуществления заключается в том, что пользовательский интерфейс управляющего блока имеет, по меньшей мере, один элемент ручного управления, отклонение которого представляет величину, пропорциональную величине запроса скорости, передаваемого на управляющее устройство, осуществляющее управление приводным двигателем. Реакция приводного двигателя на отклонение элемента ручного управления является различной для движения при транспортировке установки с одного места на другое с большой скоростью и для движения при позиционировании с малой скоростью. Диапазоны перемещения элемента управления могут быть масштабированы различным образом для движений при позиционировании и переезде с одного места на другое. Кроме того, сопротивление движению, противодействующее отклонению элемента управления, может быть различным для разных условий движения.
Идея варианта осуществления заключается в том, что установка бурения по породе снабжена, по меньшей мере, одним датчиком наклона для обнаружения неожиданного продольного наклона и качания установки бурения по породе. Управляющее устройство осуществляет управление приводным оборудованием для компенсации обнаруживаемого перемещения. Благодаря этому осуществлению можно повысить устойчивость установки бурения по породе.
Идея варианта осуществления заключается в том, что приводное оборудование содержит, по меньшей мере, один датчик импульсов, который создает импульсы при вращении, по меньшей мере, одного компонента приводного оборудования. Данные измерения, получаемые от датчика импульсов, передаются к управляющему блоку. Управляющий блок осуществляет управление вращением приводного двигателя на основании данных измерения с точностью до одного созданного импульса.
Идея варианта осуществления заключается в том, что механическое передаточное соединение содержит, по меньшей мере, одну коробку передач, для приведения в действие которой приспособлен приводной двигатель.
Идея варианта осуществления заключается в том, что приводной двигатель представляет собой ступичный электродвигатель, расположенный непосредственно на валу ведущего колеса.
Идея варианта осуществления заключается в использовании основных тормозов, соединенных с колесами установки бурения по породе, только при исключительных обстоятельствах. Приводной двигатель служит рабочим тормозом, а основные тормоза предназначены только для непредвиденных случаев. Когда остановка и поддержание неподвижной установки бурения по породе осуществляются посредством приводного электродвигателя и управления им, оператору нет необходимости использовать тормозную педаль или соответствующий элемент управления основного или стояночного тормоза во все время нормального движения. Это облегчает работу оператора.
Краткое описание чертежей
Некоторые осуществления будут пояснены более подробно в сочетании с сопровождающими чертежами, на которых изображено следующее:
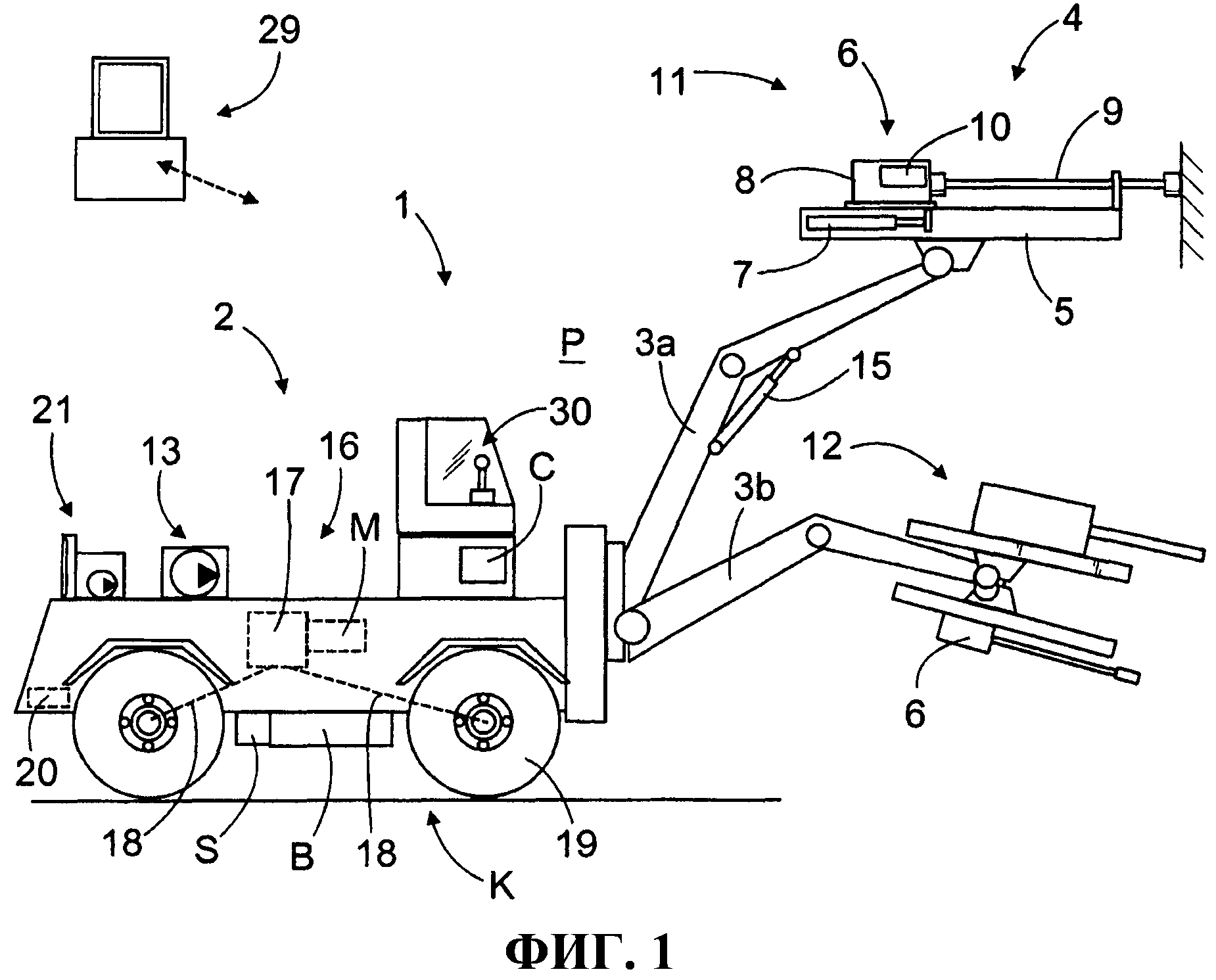
фиг.1 изображает схематичный вид установки бурения по породе, которая позиционирована для бурения на месте бурения;
фиг.2 - схематичный вид приводного оборудования с приводным электродвигателем, соединенным с ведущими колесами с помощью механического передаточного соединения с противоскольжением;
фиг.3 - схематичную диаграмму электроприводной системы;
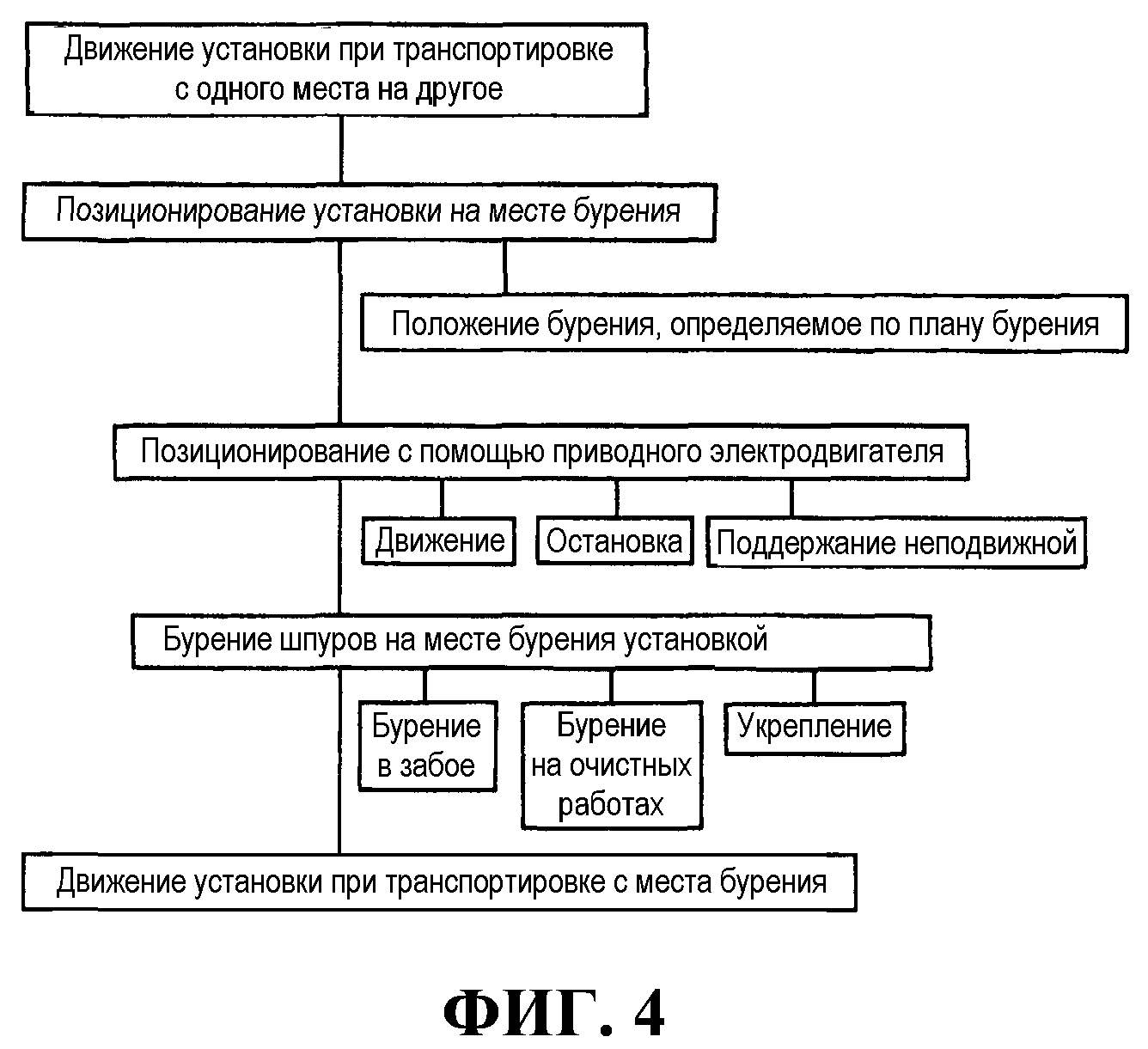
фиг.4 - схему, иллюстрирующую операции, выполняемые установкой бурения по породе;
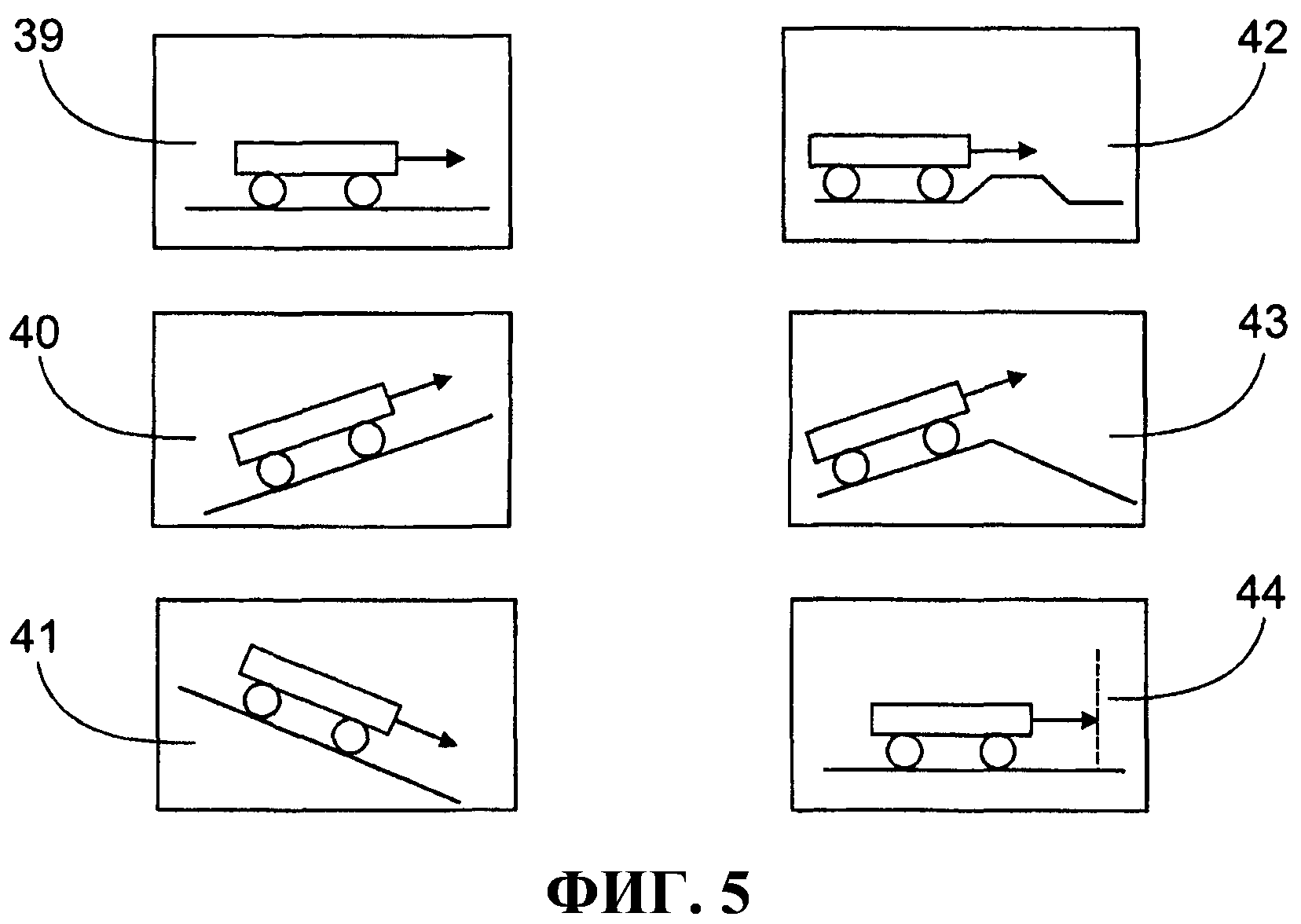
фиг.5 - схематичный вид некоторых условий движения, в которых приводное оборудование изобретения облегчает работу оператора;
фиг.6 - схематичный вид пользовательского интерфейса управляющего блока; и
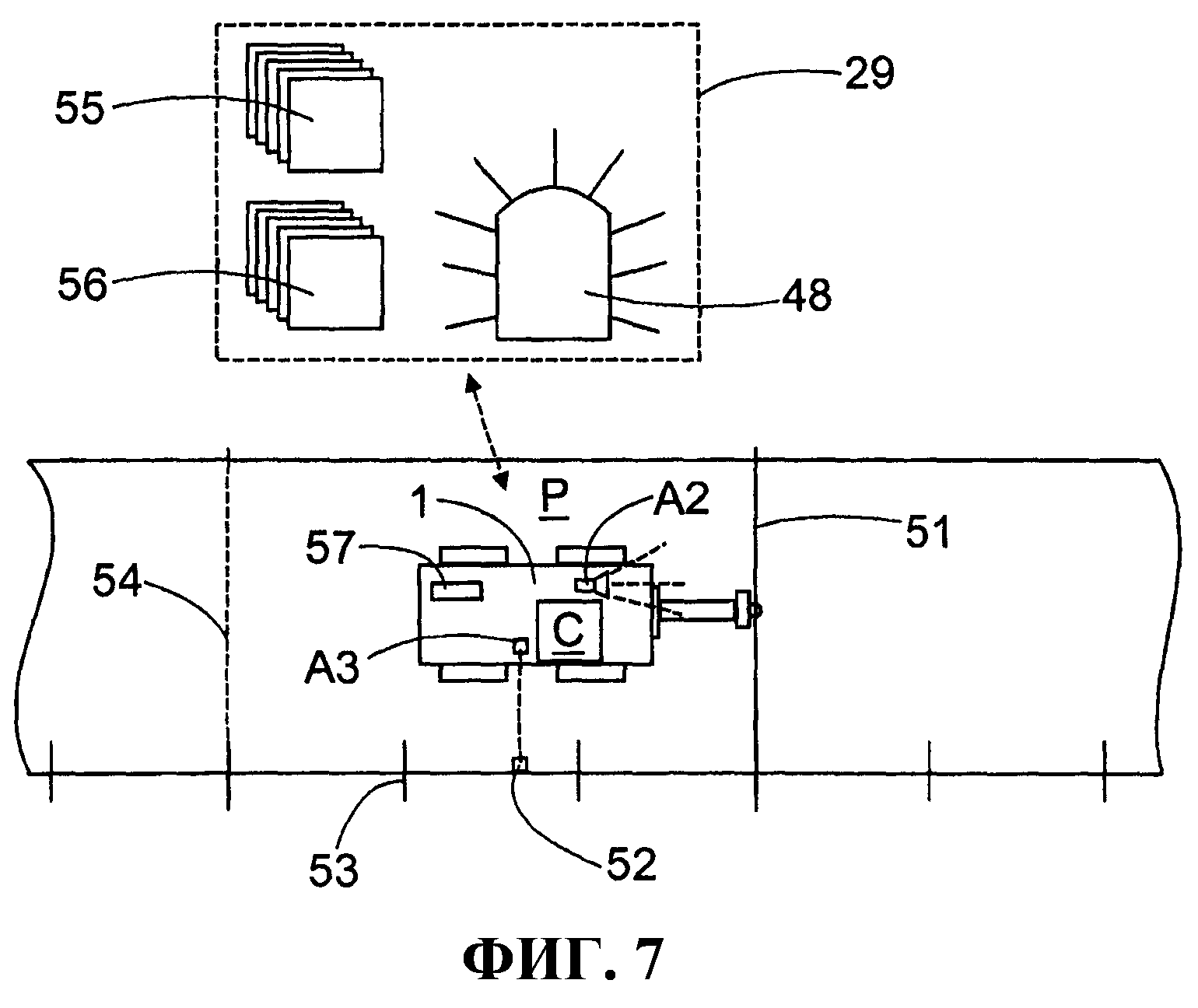
фиг.7 - схематичный вид сверху, иллюстрирующий позиционирование установки на месте бурения веерных шпуров.
Ради ясности на фигурах некоторые осуществления показаны упрощенным образом. На фигурах аналогичные детали обозначены одинаковыми позициями.
Подробное описание некоторых осуществлений
На фиг.1 показана установка 1 бурения по породе, содержащая транспортное средство 2, которое снабжено одной или несколькими буровыми стрелами-манипуляторами 3a, 3b, оснащенными буровым агрегатом 4. Буровой агрегат 4 может содержать направляющую 5, снабженную машиной 6 бурения по породе, которая может перемещаться на направляющей 5 посредством подающего устройства 7. Машина 6 бурения по породе может содержать ударное устройство 8 для формирования ударных импульсов, прикладываемых к инструменту 9, и вращающее устройство 10 для вращения инструмента 9. Кроме того, она может включать в себя промывочное устройство. Стрела-манипулятор 3а, показанная на фигуре, и буровой агрегат 4, расположенный на ней, предназначены для бурения шпуров в забое 11 туннеля или на соответствующем месте бурения. В качестве варианта стрела-манипулятор и буровой агрегат на ней могут предназначаться для бурения веерных шпуров в кровле и стенках каверны в горной породе. Кроме того, установка 1 бурения по породе может содержать стрелу-манипулятор 3b, снабженную устройством 12 для установки штанговой крепи, которое также имеет машину 6 бурения по породе. Установка 1 бурения по породе может содержать гидравлическую систему 13, которая включает в себя гидравлический насос 34, гидравлические каналы, бак и необходимые управляющие средства, такие как клапаны и т.п. Гидравлическая система 13 может быть буровой гидравлической системой, к которой присоединены приводы 15, необходимые для перемещения буровых стрел-манипуляторов 3a, 3b, и машина 6 бурения по породе. Кроме того, установка 1 бурения по породе содержит один или несколько управляющих блоков С, выполненных с возможностью управления системами установки 1 бурения по породе. Управляющий блок С может быть компьютером или соответствующим управляющим устройством, содержащим процессор, программируемую логику, или любым другим управляющим устройством, пригодным для решения задачи, для которого можно задавать, по меньшей мере, один алгоритм управления, в соответствии с которым оно будет осуществлять управление независимо или во взаимодействии с оператором. Управляющий блок С может быть соединен с управляющей системой 29 шахты, с которой могут передаваться схемы расположения шпуров, информация о местах бурения и движениях при переездах с одного места на другое, сведения о маршруте и другие инструкции и информация для работы в шахте.
Установку 1 бурения по породе позиционируют на месте Р бурения для бурения одного или нескольких шпуров. Обычно бурение выполняют в соответствии с предварительно составленной схемой расположения шпуров. Когда задачи, поставленные для места Р бурения, выполнены, установку 1 перемещают с места Р бурения на новое место бурения или куда-нибудь на другое место, например на место технического обслуживания. Установка 1 снабжена приводным оборудованием 16, которое не включает в себя двигатель внутреннего сгорания, то есть оно выполнено без двигателя внутреннего сгорания. Вместо него приводное оборудование 16 включает в себя один или несколько электродвигателей М, которые создают энергию, необходимую для движения при переезде с одного места на другое. Электродвигатель М может быть соединен с коробкой 17 передач, от которой энергия вращения передается через валы или соответствующие элементы 18 силовой передачи к одному или нескольким колесам 19. Энергию, необходимую для движения при транспортировке установки с одного места на другое, можно запасать в аккумуляторе В энергии, которым может быть, например, батарея. Приводное оборудование 16 может дополнительно включать в себя одно или несколько управляющих устройств S и один или несколько тормозных резисторов 20.
На фиг.1 также показан элемент 30 ручного управления, с помощью которого оператор может передавать запрос относительно скорости движения и мощности на управляющий блок С, который управляет системой электропривода на основании передаваемого запроса. Элемент 30 управления образует часть пользовательского интерфейса управляющего блока С. Элемент 30 управления может представлять собой механическую конструкцию, или он может быть реализован программным обеспечением на дисплее или соответствующим способом.
Установка 1 бурения по породе также может быть снабжена системой 21 жидкостного охлаждения для охлаждения электрических компонентов K приводного оборудования 16, и благодаря охлаждению его можно больше нагружать во время движения.
На фиг.2 показано приводное оборудование 16, в котором электродвигатель М может быть связан посредством линий 22 передачи с противоскольжением непосредственно с коробкой 17 передач, которая может включать в себя одну, две или большее количество шестерен в прямом направлении движения и соответственно в обратном направлении. Крутящий момент может передаваться от коробки 17 передач к валам 24 колес посредством валов 23. Угловая передача 25 или аналогичная может быть расположена между валами 23 и 24. В этом случае между колесами 19 и электродвигателем М имеется механическая передача с противоскольжением. Кроме того, электродвигатель М может использоваться для торможения. При длительном торможении электродвигатель М может служить генератором и преобразовывать кинетическую энергию транспортного средства 2 в электрическую энергию, например, при движении вниз под уклон в шахте. Генерируемая электрическая энергия может запасаться в аккумуляторе В энергии и таким образом возвращаться. Избыточная электрическая энергия, которая не может быть использована, может быть преобразована в тепловую энергию в тормозных резисторах 20. Приводное оборудование 16 также включает в себя управляющее устройство S, которое может содержать преобразователь частоты, посредством которого вращением электродвигателя М можно управлять бесступенчато во время движения и торможения. Система электропривода также может содержать другие необходимые электрические управляющие устройства для регулирования электрических токов.
Оператор может управлять движением транспортного средства 2 вперед и назад путем выдачи запроса скорости с помощью элемента 30 управления в управляющий блок С. Кроме того, когда элементом 30 управления снижают запрос скорости, приводное оборудование 16 уменьшает скорость транспортного средства 2, при этом отсутствует необходимость в использовании тормозов. Когда транспортное средство 2 позиционируют, элементом 30 управления можно изменять значение запроса скорости до нулевого, и в этом случае приводное оборудование 16 поддерживает транспортное средство 2 неподвижным.
Установка 1 бурения по породе может быть снабжена одним или несколькими измерительными устройствами А-А3 для определения скорости транспортного средства 2. Вращение вращающегося компонента в приводном оборудовании 16 может быть измерено измерительным устройством А. Измерительное устройство А может быть датчиком импульсов, пристроенным, например, к коробке 17 передач или валу. Данные измерений передаются на управляющий блок С, в котором вычисляется скорость транспортного средства. Кроме того, скорость транспортного средства 2 можно определять при использовании других измерительных устройств. Измерительное устройство А2 может быть радиолокатором, который определяет скорость относительно поверхности движения, поверхностей стенок или кровли шахтного туннеля. Кроме того, для определения скорости можно использовать измерительное устройство А3, которое связано с внешней контрольной точкой. В таком случае измерительное устройство А3 может иметь линию передачи данных на базовые станции, спутники или радиомаяки.
На фиг.2 показан помеченный пунктирными линиями еще один вариант осуществления, в котором приводной электродвигатель жестко связан со средством передачи энергии. В сочетании с валом 24 слева имеется колесный полюсный электродвигатель М1, который при необходимости может иметь коробку передач, присоединенную к нему. Кроме того, крутящий момент может создаваться на валу 24 посредством одного общего приводного электродвигателя М2.
На фиг.3 представлена диаграмма, иллюстрирующая возможную реализацию системы электропривода. Приводной двигатель М может быть короткозамкнутым электродвигателем, управляемым преобразователем частоты. Приводной двигатель М соединен с ведущими колесами 19 механической линией 22 силовой передачи с противоскольжением. Ради ясности на фиг.3 не показаны коробка передач или другие элементы, относящиеся к силовой передаче. Внутренняя схема 31 управления преобразователя частоты выделена на фигуре пунктирной линией. Блоком 32 показано, что с помощью преобразователя частоты можно управлять вращающимся электрическим полем приводного двигателя М. Блок 33 выбора обеспечивает схему 31 управления опорным значением для скорости вращения приводного двигателя М. Оператор с помощью элемента 30 управления может воздействовать на величину этого опорного значения. Кроме того, на опорное значение может воздействовать системный контроллер 34, который может быть контроллером постоянной скорости, с помощью которого управляющая система регулирует скорость. На блок 33 выбора также подается информация об измеряемой фактической скорости. Приводная силовая передача может иметь измерительное устройство А, такое как датчик угловой скорости, сигнал которого преобразуется в расстояние, что показано блоком 35. Опорное значение заданного местоположения или перемещения показано блоком 36. Блоком 37 представлен позиционный контроллер, который содержит предельное значение для скорости установки бурения по породе. Позиционный контроллер 37 также соединен с блоком 33 выбора. На диаграмме также имеется блок 38 для ввода опорного значения крутящего момента, которое на практике представляет собой опорное значение тока для схемы 31 управления. При наличии этого опорного значения крутящего момента или тока управляющая система по требованию допускает или ограничивает максимальное опорное значение крутящего момента, например, в соответствии с нагревом компонента. Схема 31 управления осуществляет регулирование управляющей системы таким образом, что крутящий момент нагрузки и крутящий момент приводного двигателя всегда являются одинаковыми.
В этом применении преобразователь частоты назван управляющим устройством, посредством которого скорость вращения приводного электродвигателя может регулироваться бесступенчато. Преобразователь частоты может быть инвертором или он может быть преобразователем постоянного тока в переменный ток, который управляет работой электродвигателя.
На фиг.4 представлена упрощенная схема, иллюстрирующая позиционирование установки согласно изобретению. Показанное на данной фигуре описано в разделе «Краткое описание изобретения».
На фиг.5 показаны ситуации, в которых приводное оборудование изобретения является особенно полезным. В случае движения 39 при транспортировке установки с одного места на другое управляющая система может содержать контроллер постоянной скорости, который поддерживает постоянную скорость и облегчает работу оператора. При движении 40 на подъеме управляющая система поддерживает заданную скорость, даже если крутящая нагрузка, прикладываемая к ведущим колесам, возрастает. При движении 41 на спуске установка, в свою очередь, пытается увеличить скорость, но в таком случае уменьшается частота вращения приводного электродвигателя и предотвращается повышение скорости сверх заданной скорости. При движении 42 через препятствие система обеспечивает хороший контроль перемещений и, следовательно, точное движение. При движении 43 на неровном грунте можно исключать неожиданные перемещения транспортного средства, когда сила, противодействующая движению транспортного средства вперед, неожиданно уменьшается. Кроме того, транспортное средство может совершать движение 44 на основании вводимого точного значения расстояния, в результате чего за один раз транспортное средство может передвигаться всего на 1 см.
На фиг.6 показан один возможный пользовательский интерфейс управляющего блока С, имеющий одно или несколько дисплейных устройств 45. Скорость 46 установки и возможные диапазоны 47 скоростей и пределы скоростей могут отображаться для оператора на дисплейном устройстве 45. Кроме того, на дисплейном устройстве может отображаться информация, относящаяся к бурению, такая как схема расположения шпуров, на которой могут обозначаться места, количества и направления шпуров, которые должны быть пробурены, а также точное местоположение места бурения, например, в виде координат. Пользовательский интерфейс может иметь элементы выбора, такие как нажимные кнопки 49, при использовании которых приводное оборудование осуществляет перемещение транспортного средства на заданное расстояние. Кроме того, информация о скорости и расстоянии может предоставляться управляющей системе элементами 30 электрического управления, которые оператор использует для ручного управления. Пользовательский интерфейс также может иметь элементы 50 выбора, предназначенные для выбора различных диапазонов скоростей. В таком случае при позиционировании можно выбирать конкретный режим движения, при котором перемещение транспортного средства может происходить более точно и более контролируемым образом, чем в режиме движения, предназначенном для переезда с одного места на другое.
На фиг.7 показано позиционирование установки 1 бурения по породе на месте Р бурения, предназначенном для бурения набора веерных шпуров. Информация о месте Р бурения и схеме 48 расположения шпуров может передаваться от управляющей системы 29 шахты на управляющий блок С. На схеме 48 расположения шпуров может быть обозначена навигационная плоскость 51, на которой задается расположение шпуров в каверне в горной породе. Положение установки 1 бурения по породе можно определять, измеряя с помощью сканера А2 местоположение поверхностей каверны в горной породе относительно установки бурения по породе, или положение можно определять, принимая сигнал от передатчика 52 к приемнику А3. В таком случае на дисплейном устройстве оператору может быть показано расстояние до планируемой навигационной плоскости 51. Шахтное транспортное средство также может иметь средство для счисления пути, и в этом случае непрерывно измеряются направление и расстояние. В шахте могут иметься пронумерованные маркшейдерские знаки 53, то есть расстояния от заданного опорного положения. С помощью этих пронумерованных маркшейдерских знаков 53 можно определять расстояние до навигационной плоскости 51. В шахте можно заблаговременно определять место 54, где транспортное средство переходит в режим движения, связанный с позиционированием. Из фиг.7 также видно, что управляющая система 29 шахты может содержать элементы 55 данных, с помощью которых можно влиять на скорость, используемую, например, в случаях движения при позиционировании и движения при переезде с одного места на другое. Когда положение установки 1 бурения по породе в шахте является известным, скорость можно устанавливать ниже максимально допустимой скорости, которая может быть задана в элементе 56 данных о максимальной скорости, и для этого элемента 56 данных можно задавать различные допустимые скорости на разных участках шахты. Кроме того, установка 1 бурения по породе может быть снабжена датчиком 57 наклона для обнаружения неожиданного продольного наклона и качания транспортного средства 2. Эти перемещения можно компенсировать путем управления приводной силовой передачей 16 с помощью управляющего устройства С для создания надлежащих противодействующих сил.
Кроме того, упомянутое выше приводное оборудование можно использовать для движений при транспортировке установки с одного места на другое. Способ, подходящий для движения при транспортировке установки с одного места на другое, содержит следующие этапы: движение установки бурения по породе с помощью приводного оборудования без двигателя внутреннего сгорания, при котором необходимый крутящий момент создается, по меньшей мере, одним приводным электродвигателем, которым управляет, по меньшей мере, одно управляющее устройство и с которого крутящий момент передается через передаточное соединение к, по меньшей мере, одному ведущему колесу; ввод в пользовательский интерфейс управляющего блока запроса скорости для управляющего устройства, которым задается опорное значение для управляющего устройства, предназначенное для регулирования скорости вращения приводного двигателя и для реализации запроса скорости; передача вращательного движения приводного двигателя через жесткое приводное соединение к ведущему колесу; измерение фактической скорости вращения приводного оборудования и определение скорости установки бурения по породе; сравнение полученной скорости с запросом скорости; регулирование контрольного значения управляющего устройства для установления скорости соответственно запросу скорости.
Хотя приводное оборудование установки бурения по породе выполнено совершенно без двигателя внутреннего сгорания, транспортное средство установки бурения по породе может иметь резервный приводной узел, который может содержать двигатель внутреннего сгорания. Этот двигатель внутреннего сгорания должен приводить в действие генератор для выработки электрической энергии. Однако резервный приводной узел не включен в состав приводного оборудования, и он предназначен для использования только в особых ситуациях, например, когда батарея разряжена или повреждена.
В некоторых случаях признаки, раскрытые в данной заявке, можно использовать сами по себе независимо от других признаков. С другой стороны, признаки, раскрытые в данной заявке, при необходимости можно объединять для образования различных сочетаний.
Чертежи и связанное с ними описание предполагаются только иллюстрирующими идею изобретения. Признаки изобретения могут меняться в объеме формулы изобретения.
Реферат
Группа изобретений относится к способу позиционирования установки бурения по породе и к самой установке. Способ заключается в том, что осуществляют перемещение установки бурения по породе с помощью приводного оборудования без двигателя внутреннего сгорания, создают необходимый крутящий момент приводным электродвигателем, передают вращательное движение приводного электродвигателя по механическому передаточному соединению с противоскольжением к ведущему колесу, позиционируют установку бурения по породе на месте бурения в случае неровной или наклонной поверхности движения, используют электродвигатель для перемещения и остановки установки во время позиционирования, поддерживают постоянным отношения между скоростью вращения приводного электродвигателя и скоростью вращения ведущего колеса во время движения установки при позиционировании независимо от изменений нагрузки крутящим моментом. Установка бурения по породе содержит транспортное средство, приводное оборудование без двигателя внутреннего сгорания. Приводное оборудование содержит приводной электродвигатель, управляющее устройство, элементы силовой передачи, стрелу-манипулятор, машину бурения по породе, управляющий блок, механическое передаточное соединение с противоскольжением между приводным электродвигателем и ведущим колесом, измерительное устройство для определения скорости установки. Технический результат заключается в повышении точности позиционирования установки. 2 н. и 18 з.п. ф-лы, 7 ил.