Способ работы жатки, жатка и зерноуборочный комбайн - RU2756181C2
Код документа: RU2756181C2
Чертежи
Описание
Область техники
Настоящее изобретение относится к способу работы жатки согласно ограничительной части пункта 1 формулы изобретения. Кроме того, изобретение относится к жатке согласно ограничительной части пункта 10 формулы и зерноуборочному комбайну согласно пункту 14 формулы.
Уровень техники
Из уровня техники известна эксплуатация жаток, оснащенных ленточными транспортерами для транспортировки убранной культуры (так называемыми полотенными транспортерами) и ножевым брусом (работающим в жестком или гибком режиме в зависимости от условий уборки), по меньшей мере, в двух различных режимах работы. Для уборки зерновых жатку с зафиксированным ножевым брусом ведут над почвой на предварительно заданной высоте резания, то есть с предварительной настройкой высоты. При этом расстояние между жаткой и почвой постоянно корректируют в зависимости от изменения расстояния между почвой и ножевым брусом. Для этого жатка содержит первое сенсорное устройство, расположенное на жатке с возможностью отключения и предназначенное для эксплуатации жатки в первом режиме ее работы. При этом первое сенсорное устройство выполнено в виде нескольких следящих рычагов или скоб-копиров, расположенных на нижней стороне жатки в непосредственной близости от ножевого бруса.
Второй режим работы предусматривает гибкую работу ножевого бруса, прилегающего к почве для отслеживания ее контуров, в то время как рама жатки движется на заданном расстоянии от почвы. Для этого жатка содержит второе сенсорное устройство, предназначенное для эксплуатации жатки во втором режиме работы.
Для переключения между двумя этими режимами работы необходимо отключить первое сенсорное устройство, например, путем демонтажа скоб-копиров или ручного перевода скоб-копиров в парковочное положение, после чего откалибровать управляющее устройство при помощи исполнительного механизма, удерживающего заданное расстояние между жаткой или рамой жатки и почвой на постоянном уровне. Переключение с первого режима работы на второй режим работы и обратно занимает много времени вследствие необходимости в ручном отключении или подключении, требующем прерывания работы, а также в соответствующем процессе калибровки.
Раскрытие сущности изобретения
Таким образом, задачей настоящего изобретения является разработка способа работы жатки и самой жатки, позволяющих более гибко реагировать на изменяющиеся условия уборки урожая.
Согласно изобретению, поставленная задача решена способом с признаками, раскрытыми в пункте 1 формулы, и жаткой с признаками, раскрытыми в пункте 10 формулы. Кроме того, задача решена зерноуборочным комбайном с признаками, раскрытыми в пункте 14 формулы.
Выгодные варианты осуществления раскрыты в независимых пунктах формулы изобретения.
В соответствии с пунктом 1 формулы предложен вариант, в котором при переключении между по меньшей мере двумя режимами работы в зависимости от выбранного режима работы первое или второе сенсорное устройство активируют для определения расстояния, не прерывая работы. Способ согласно изобретению предусматривает одновременную работу обоих сенсорных устройств, причем в соответствии с выбранным режимом работы для управления высотой жатки обрабатывают входные сигналы, полученные только от первого сенсорного устройства или только от второго сенсорного устройства. Таким образом, для переключения с первого на второй режим работы не нужно вручную отключать первое сенсорное устройство, расположенное на жатке, путем его демонтажа или перевода в парковочное положение, как это происходит в уровне техники, сопровождаясь прерыванием работы. То же самое справедливо для переключения со второго на первый режим работы, осуществляемого в соответствии с изобретением также без прерывания работы, в то время как в уровне техники оно требует повторного монтажа или вывода скобы-копира из парковочного положения.
Первое сенсорное устройство может быть выполнено в виде механически отслеживающего контур почвы устройства, в частности, скоб-копиров, копирующих полозков или иных подобных устройств. В альтернативном варианте первое сенсорное устройство может быть выполнено в виде бесконтактного устройства, определяющего расстояние до почвы. Второе сенсорное устройство может быть выполнено в виде устройства, встроенного в жатку, в частности раму жатки, и определяющего изменение расстояния до почвы прямо или опосредованно. Способ позволяет во время уборки урожая переключаться, по меньшей мере, между двумя режимами работы, что дает возможность гибко, быстро и не прерывая уборку урожая реагировать на изменения условий уборки. По сравнению с уровнем техники отпадает необходимость в ручном отключении первого сенсорного устройства, а также повторной калибровке первого или второго сенсорного устройства после ручной активации первого сенсорного устройства для переключения режима работы. Способ можно применять как для полотенных жаток, так и для жаток с ножевым брусом, работающим в гибком режиме.
Предпочтительно, процесс калибровки первого сенсорного устройства и второго сенсорного устройства выполняют независимо от выбранного режима работы. При этом процесс калибровки первого сенсорного устройства и второго сенсорного устройства можно выполнять последовательно. Для этого процесс калибровки можно инициировать после успешной навески на уборочную машину, в частности, зерноуборочный комбайн, чтобы откалибровать первое сенсорное устройство и второе сенсорное устройство. При этом на предыдущем этапе можно проверить наличие первого сенсорного устройства, расположенного на жатке. Кроме того, на предыдущем этапе можно автоматически гидравлически ослабить ножевой брус. Для калибровки можно определить верхний и нижний предел датчиков положения первого и второго сенсорного устройства. Данные, полученные в процессе калибровки первого сенсорного устройства и второго сенсорного устройства, записывают в управляющее устройство, благодаря чему они будут постоянно доступны при переключении между режимами работы.
В альтернативном варианте калибровку первого сенсорного устройства и второго сенсорного устройства можно выполнять независимо друг от друга. Это означает, что процесс калибровки сначала выполняют только для второго сенсорного устройства, поскольку, например, установленное с возможностью, по меньшей мере, частичного отсоединения первое сенсорное устройство на момент инициации процесса калибровки отсутствует на жатке. Соответственно, после установки первого сенсорного устройства процесс калибровки можно выполнить отдельно только для этого устройства. Как было указано выше, данные, полученные в процессе калибровки для первого и второго сенсорного устройства, записываются в управляющее устройство, благодаря чему они всегда доступны при переключении между режимами работы.
В частности, в первом режиме работы, в котором жатка работает с зафиксированным ножевым брусом, можно активировать первое сенсорное устройство, с помощью которого регулируют или управляют заданной высотой жатки. Для фиксации можно гидравлически зажать ножевой брус с помощью исполнительного механизма.
Во втором режиме работы, в котором жатка работает с гибко перемещающимся ножевым брусом, можно активировать второе сенсорное устройство, с помощью которого регулируют или управляют заданной высотой рамы жатки. Для гибкой работы можно гидравлически ослабить ножевой брус с помощью соответствующей активизации исполнительного механизма.
Так, во время уборки урожая в первом режиме работы с фиксированным ножевым брусом может возникнуть ситуация, в которой между стоящими злаками будут находиться участки полеглых злаков, требующие срезания прямо над землей, то есть ниже предустановленной высоты среза. Для этого можно переключиться из первого режима работы во второй режим работы с гибким режимом ножевого бруса, что позволит придвинуть его к почве, в то время как рама жатки будет перемещаться на заданном расстоянии от почвы. В этой ситуации первое сенсорное устройство будет отключено, то есть сигналы, генерируемые первым сенсорным устройством, не будут обрабатываться для управления расстоянием. Вместо этого при переключении во второй режим работы будет активировано неактивное до данного момента второе сенсорное устройство, что позволит обрабатывать сигналы второго сенсорного устройства и использовать их для управления расстоянием или регулирования высоты жатки. Оба сенсорных устройства могут работать перекрестно, что позволяет быстро переключаться между режимами работы и комбинировать их между собой. Для улучшения работы разумно включить в процесс управления или регулирования систему разгрузки гибко перемещающегося ножевого бруса.
Предпочтительно, при эксплуатации жатки выше заданной высоты ножевой брус можно автоматически переводить в зафиксированное состояние независимо от выбранного режима работы. Это имеет смысл, например, при достижении поворотной полосы, поскольку при этом жатка поднимается. Это обеспечивает оптимальное или минимальное расстояние между мотовилом и столом жатки и позволяет мотовилу поддерживать поток культуры на оптимальном уровне.
Кроме того, при эксплуатации жатки с ножевым брусом в гибком режиме выше заданной высоты можно активировать первое сенсорное устройство в зависимости от времени. Это имеет смысл в том случае, если в конце поворотной полосы жатку вводят в убираемую культуру, поскольку первое сенсорное устройство соприкасается с почвой еще до того, как второе сенсорное устройство сможет сгенерировать сигнал.
В частности, при эксплуатации жатки ниже заданной пороговой высоты ножевой брус можно автоматически перевести в гибкий режим независимо от выбранного режима работы.
Кроме того, при эксплуатации жатки с ножевым брусом в гибком режиме ниже заданной пороговой высоты второе сенсорное устройство можно активировать в зависимости от времени. Эта функция также полезна при повторном введении навесного оборудования в убираемую культуру, так как ножевой брус ослабляется непосредственном перед почвой. Благодаря этому, например, расположенные на жатке колосоподъемники опускаются к почве под правильным, а не под крутым углом, как это могло бы случиться при немедленном ослаблении ножевого бруса при повторном введении в культуру.
Кроме того, задача решена жаткой с ножевым брусом, который может быть переведен исполнительным механизмом в фиксированный или гибкий режим работы в зависимости от условий уборки, причем жатка работает, по меньшей мере, в двух различных режимах работы и содержит первое сенсорное устройство, установленное на жатке с возможностью отключения и предназначенное для эксплуатации жатки в первом режиме работы, и второе сенсорное устройство, предназначенное для эксплуатации жатки во втором режиме работы. Жатка отличается тем, что она соединена с управляющим устройством, которое для определения расстояния и без прерывания работы активирует первое сенсорное устройство или второе сенсорное устройство при переключении между по меньшей мере двумя режимами работы в зависимости от выбранного режима работы. Предпочтительно, жатка может содержать управляющее устройство. Это выгодно тем, что при использовании жатки попеременно с другими уборочными машинами описываемый изобретением способ можно реализовать независимо от дополнительного блока управления уборочной машины. Несмотря на это, управляющее устройство также может входить в состав уборочной машины, с которой эксплуатируется жатка. Ножевой брус расположен на несущих консолях, шарнирно соединенных с основной рамой жатки. При помощи исполнительного механизма, содержащего гидравлические цилиндры, присоединенные к соответствующим несущим консолям, можно, нагружая данный механизм соответствующим давлением, переводить ножевой брус в фиксированный или гибкий режим работы. Калибровочные данные первого сенсорного устройства и второго сенсорного устройства, необходимые для переключения между режимами работы без прерывания работы, предпочтительно, записаны в управляющее устройство.
При этом первое сенсорное устройство может содержать, по меньшей мере, два сканирующих почву устройства, расположенные на стороне жатки, обращенной к почве. Такие устройства сканирования почвы, закрепленные на жатке с возможностью отсоединения, могут представлять собой, например, скобы-копиры, копирующие полозки или иные механические средства определения изменения контуров почвы. В альтернативном варианте устройство сканирования почвы может быть также выполнено в виде бесконтактного устройства.
В частности, второе сенсорное устройство может быть выполнено с возможностью обнаружения поворотного движения, вызванного несущими консолями жатки, служащими опорой для ножевого бруса. Для этого второе сенсорное устройство может быть встроено в жатку.
Кроме того, управляющее устройство может быть выполнено с возможностью управления исполнительным механизмом, посредством которого ножевой брус может быть переведен в фиксированный или гибкий режим работы. Это позволяет быстро переключаться между режимами работы.
Кроме того, задача решена зерноуборочным комбайном с жаткой по одному из предыдущих пунктов 10-13, которую можно эксплуатировать, в частности, способом по одному из пунктов 1-9. Зерноуборочный комбайн с такой жаткой позволяет легко переключаться между по меньшей мере двумя режимами работы, не требуя ручного отключения первого сенсорного устройства до изменения режима работы. Кроме того, отсутствуют затраты на калибровку при соответствующем переключении между режимами работы.
Краткое описание чертежей
Предложенное изобретение детально описано ниже со ссылкой на прилагаемые фигуры, на которых изображено:
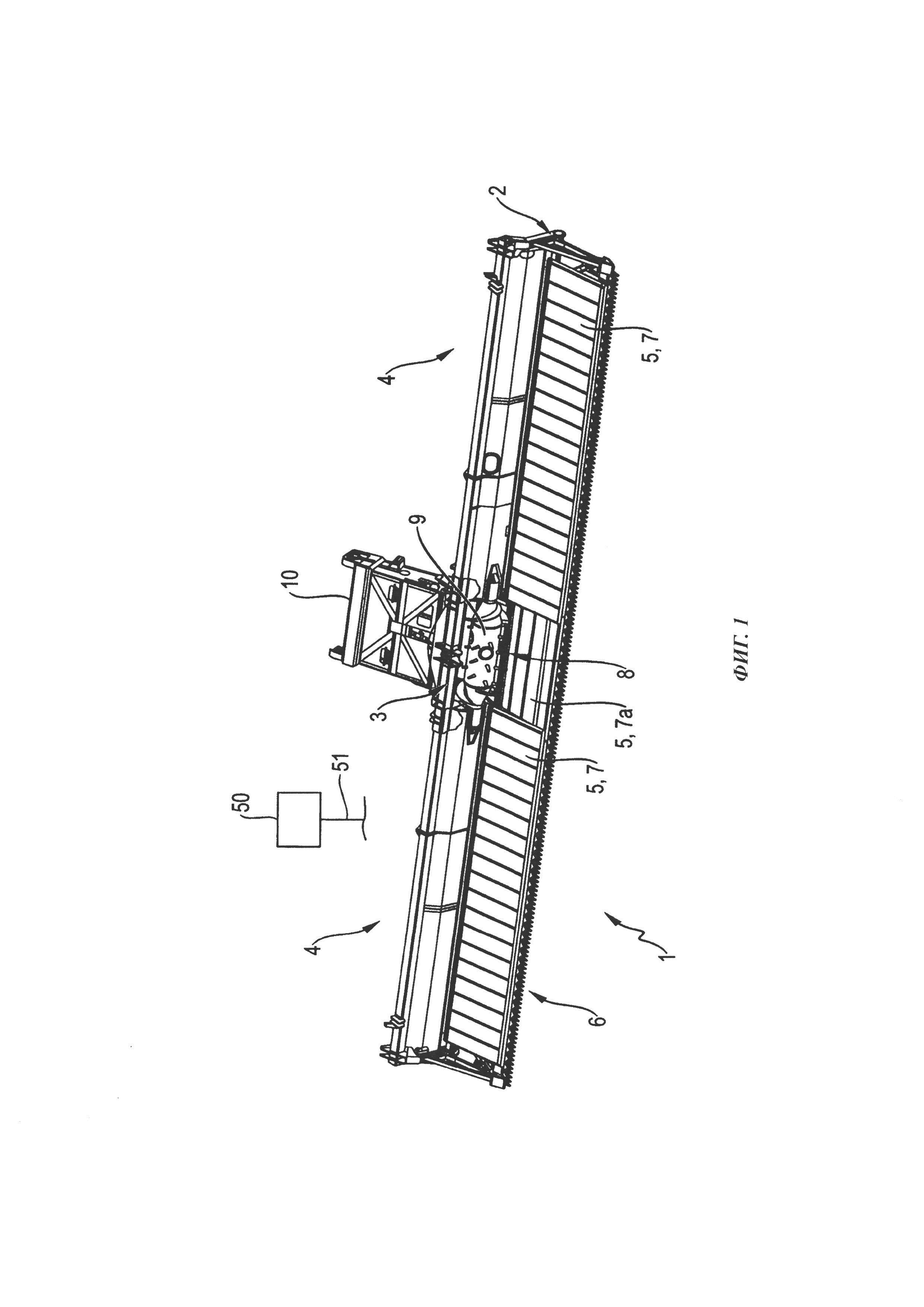
Фигура 1: схематичный вид жатки.
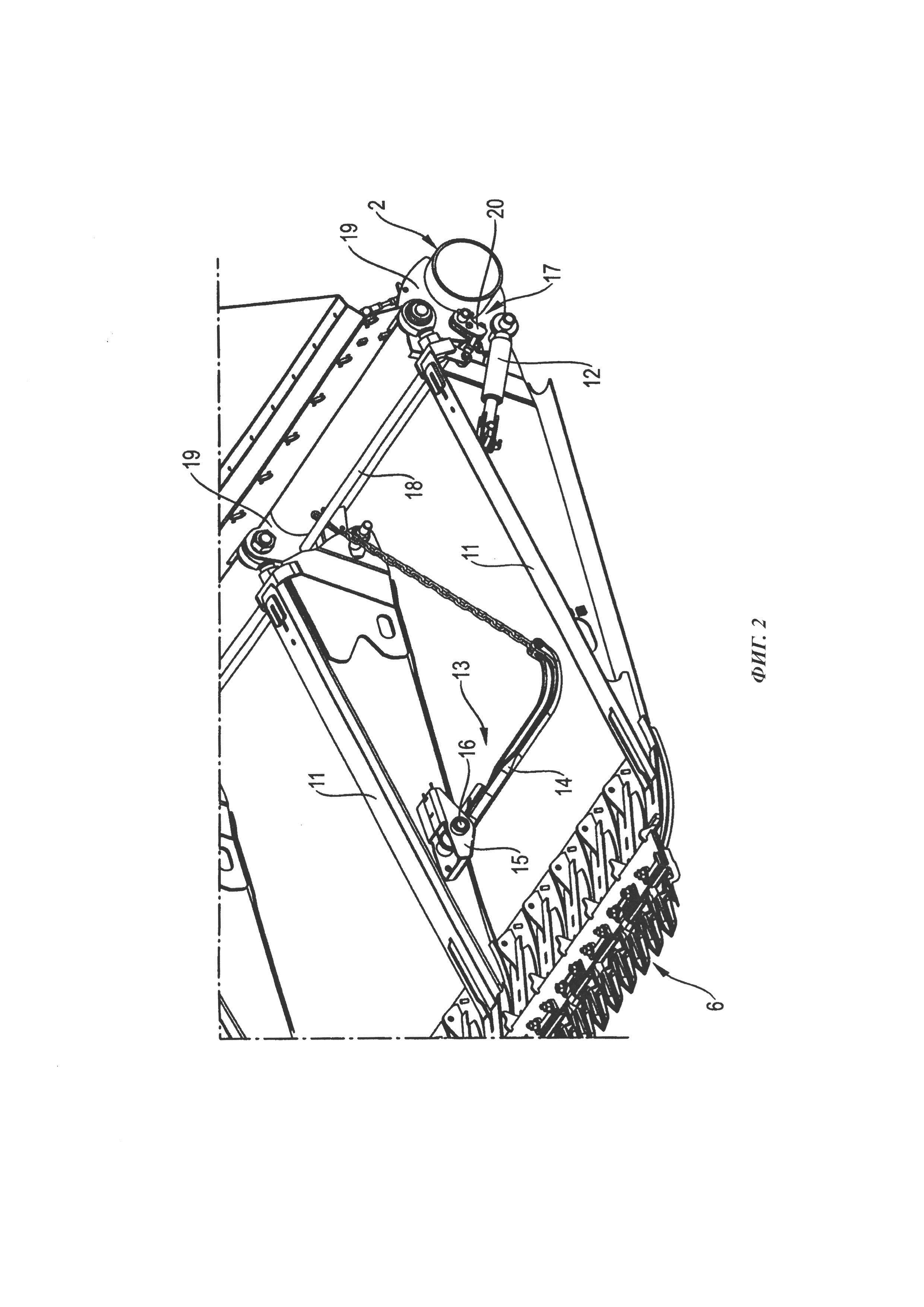
Фигура 2: фрагмент жатки, изображенной на фигуре 1.
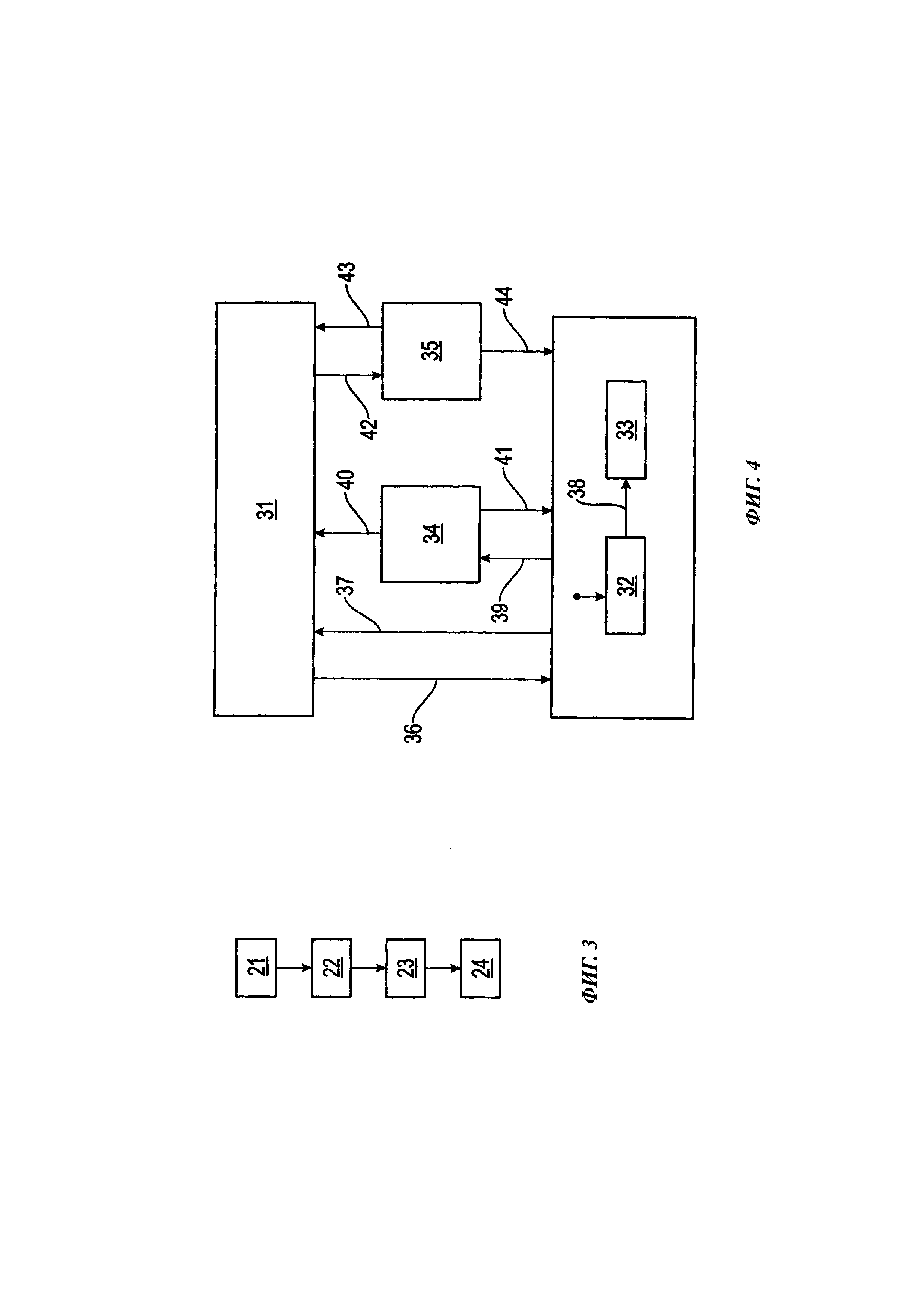
Фигура 3: блок-схема, иллюстрирующая процесс калибровки.
Фигура 4: блок-схема, иллюстрирующая рабочие состояния и переходы между рабочими состояниями.
Осуществление изобретения
На фигуре 1 схематично изображена жатка 1. Жатка 1 содержит основную раму 2, на которой расположена центральная часть 3 и, по меньшей мере, две боковые части 4, расположенные по соседству с центральной частью 3. В центральной части 3 и боковых частях 4 на передней стороне жатки 1, противоположной основной раме 2, находится ножевой брус 6, проходящий, по существу, по всей ширине жатки 1. На основной раме 2 жатки 1 расположены (не показанные на фигуре) мотовила, проходящие по ширине боковой части 4 и частично по ширине центральной части 3. Мотовила служат для улучшения захвата убираемой культуры ножевым брусом 6.
Убранная культура, отделенная от ножевого бруса 6, поступает на расположенное за ножевым брусом 6 транспортирующее устройство 5, выполненное на соответствующих боковых частях 4 в виде, по меньшей мере, одной бесконечной ленты 7, вращающейся параллельно продольной оси жатки 1. Бесконечно обращающиеся ленты 7 расположены рядом с центральной частью 3 и предназначены для транспортировки убранной культуры, срезанной режущим брусом 6, параллельно продольной оси жатки 1 в направлении центральной части 3 и его подачи во втягивающее устройство 8. Центральная часть 3 также содержит транспортировочное устройство 5, выполненное в виде бесконечно обращающегося транспортера 7а. Возможны и другие варианты осуществления транспортирующего устройства 5 в центральной секции 3. Втягивающее устройство 8 выполнено в виде втягивающего ролика 9 с приводом. Втягивающее устройство 8 подает убранную культуру, поступающую сбоку с бесконечных лент 7 на центральную часть 3, в отверстие, расположенное на основной раме 2 за втягивающим роликом 9; через это отверстие убранная культура поступает по наклонной камере 10 зерноуборочного комбайна (не показанного на фигуре), к которой с возможностью отсоединения прикреплена жатка 1, на зерноуборочный комбайн для дальнейшей обработки.
На фигуре 2 изображен фрагмент жатки, показанной на фигуре 1. К основной раме 2 относительно горизонтальной оси шарнирно присоединены несущие консоли 11. На несущих консолях 11 расположен ножевой брус 6. К каждой несущей консоли 11 присоединен исполнительный механизм, выполненный в виде гидравлического цилиндра 12 и предназначенный для перевода соответствующей несущей консоли 11 и, следовательно, ножевого бруса 6, по меньшей мере, в один первый режим работы и один второй режим работы. В первом режиме работы ножевой брус 6 зафиксирован. Для этого гидравлические цилиндры 12 нагружают гидравлическим давлением, превышающим первое предельное значение, что позволяет исключить поворот отдельных несущих консолей 11 и, следовательно, ножевого бруса 6 в вертикальном направлении. Жатка 1 движется на задаваемом расстоянии от почвы. Для управления или регулирования расстояния или высоты среза расстояние между жаткой 1 и почвой определяют с помощью первого сенсорного устройства 13.
Во втором режиме работы ножевой брус 6 эксплуатируется в гибком режиме. Для этого гидравлические цилиндры 12 нагружают гидравлическим давлением ниже второго предельного значения, вследствие чего ножевой брус 6 прилегает к почве с массовой силой, зависящей от приложенного давления. При изменении контура почвы, по меньшей мере, частично отслеживаемым ножевым брусом 6, несущие консоли 11 отклоняются в вертикальном направлении. Вертикальное отклонение определяется вторым сенсорным устройством 17.
Третий режим работы предусматривает гибкую эксплуатацию ножевого бруса 6 и транспортирующего устройства 5 боковых частей 4, расположенного после ножевого бруса 6. В этом третьем режиме работы ножевой брус 6 и бесконечно обращающиеся ленты 7 следуют за изменениями контура почвы, отслеживаемыми вторым сенсорным устройством 17.
Первое сенсорное устройство 13 выполнено в виде сканирующего почву устройства. Под ним понимают скобы-копиры 14, копирующие салазки или иные подобные устройства, установленные одним концом на опоре 15, по меньшей мере, на двух несущих консолях 11 жатки 1 с возможностью поворота вокруг горизонтальной оси 16. Предпочтительно, каждая боковая часть 4 содержит, по меньшей мере, две скобы-копира 14, расположенные на некотором удалении друг от друга. Свободный конец соответствующей скобы-копира 14 лежит на земле. При изменении контура почвы, приводящем к изменению расстояния, отклонение соответствующей скобы-копира 14 вокруг своей оси 16 поворота определяют с помощью соединенного с ней потенциометра. Сигнал, подаваемый соответствующим потенциометром, анализируется управляющим устройством 50, соединенным с жаткой 1, для выполнения соответствующей изменению расстояния коррекции, что позволяет поддерживать заданную установку высоты или высоту среза. Управляющее устройство 50 соединено сигнальным проводом 51 с сенсорными устройствами 13 и 17. Скобы-копиры 14 расположены на несущих консолях 11 с возможностью отсоединения, что позволяет заменить их при необходимости.
Второе сенсорное устройство 17 рассчитано на распознавание поворотного движения, вызванного несущими консолями 11 ножевого бруса 6 на жатке 1, эксплуатируемой во втором режиме работы. Второе сенсорное устройство 17 содержит вал 18, проходящий, по существу, по всей ширине соответствующей боковой части 4. Вал 18 установлен с возможностью вращения в консолях 19, соединенных с каждой несущей консолью 11. Кроме того, предусмотрено рычажное устройство 20, посредством которого вал 18 соединен с соответствующей несущей консолью 11. Рычажное устройство 20 служит для передачи отклонения несущей консоли 11 в вертикальном направлении на вал 18. При изменении положения несущей консоли 11 рычажное устройство 20 передает ее отклонение в вертикальном направлении на вал 18 в виде вращательного движения. Максимальное вертикальное отклонение несущей консоли 11 в боковой части 4 приводит к максимальному проворачиванию вала 18, что служит сигналом, анализируемым при автоматической регулировке высоты жатки 1. Для этого высоту жатки 1, расположенной на наклонной камере 10 зерноуборочного комбайна, необходимо отрегулировать с помощью соответствующих гидравлических цилиндров, расположенных на наклонной камере 10 и зерноуборочном комбайне, таким образом, чтобы удаление всех боковых частей 4 основной рамы 2 от почвы было приблизительно одинаковым.
Жатка 1 должна работать таким образом, чтобы при переключении, по меньшей мере, между двумя режимами работы первое сенсорное устройство 13 или второе сенсорное устройство 17 (в зависимости от выбранного режима работы) активировалось для определения расстояния без прерывания работы. Для этого до начала процесса уборки необходимо откалибровать первое сенсорное устройство 13 и второе сенсорное устройство 17. Данные, полученные при калибровке, записывают в управляющее устройство 50 с возможностью последующего вызова.
На фигуре 3 изображена блок-схема, иллюстрирующая процесс калибровки или обучения, причем в рамках процесса калибровки калибруют первое и второе сенсорное устройство 13, 17.
При этом процесс калибровки выполняется независимо от выбранного режима работы. Для этого на этапе 21 проверяют, установлено ли первое сенсорное устройство 13 на жатке 1. Независимо от наличия первого сенсорного устройства 13, на этапе 22 управляющее устройство 50 автоматически приводит в действие исполнительный механизм, выполненный в виде гидравлического цилиндра 12, с целью ослабления ножевого бруса 6. На следующих этапах 23 и 24 проводят запоминание верхнего и нижнего предельного значения второго сенсорного устройства 17, описывающего отклонение ножевого бруса 6, а также верхнего и нижнего предельного значения первого сенсорного устройства 13, описывающего отклонение скоб-копиров 14, если они установлены на жатке 1. Для этого полученные данные калибровки записывают в управляющее устройство 50 с возможностью вызова. При наличии данных калибровки для обоих сенсорных устройств 13 и 17 можно в любое время изменить режим работы, не выполняя процесс калибровки повторно.
Ниже для примера дано описание изменения режима работы жатки 1, выполняющей уборку урожая, после однократной успешной калибровки. Предполагается, что исходно включен первый режим работы, в котором жатка 1 работает с фиксированным ножевым брусом 6, используемым при уборке стебельчатых культур, например, зерновых. В рамках этого режима работы оператор устанавливает высоту среза. Высоту среза поддерживают с учетом изменения расстояния до почвы, определяемого первым сенсорным устройством 13. Второе сенсорное устройство 17 отключено, то есть управляющее устройство 50 не обрабатывает сигналы, поданные вторым сенсорным устройством 17.
Когда уборочная машина дойдет до полеглой культуры, то есть лежащих на земле стеблей, высота среза, предустановленная в первом режиме работы, не позволит убрать этот участок. В таком случае можно, не прерывая работы, переключиться с первого режима работы на второй режим работы, что позволит перевести жатку 1 в режим гибкой работы ножевого бруса 6.
На первом этапе способа скобы-копиры 14 выставляют на минимальное заданное значение. После этого ножевой брус 6 ослабляют посредством соответствующей активизации исполнительных механизмов, то есть гидравлических цилиндров 12. При прохождении второго предельного значения давления, с которым гидравлические цилиндры 12 воздействуют на несущие консоли 11, управляющее устройство 50 отключает первое сенсорное устройство 13, то есть более не обрабатывает сигналы первого сенсорного устройства 13. Вместо этого активируется второе сенсорное устройство 17, то есть управляющее устройство 50 обрабатывает его сигналы, отражающие изменение расстояния путем отклонения ножевого бруса 6, для регулировки высоты. Переключение с первого режима работы на второй режим работы также имеет смысл, если свойства и контуры почвы на убираемом поле не позволяют работать с зафиксированным ножевым брусом 6 по всей рабочей ширине жатки 1.
При выходе из области полеглой культуры оператор снова изменяет режим работы. Путем возврата заданного значения скоб-копиров 14 к исходной высоте среза инициируют переключение со второго сенсорного устройства 17 на первое сенсорное устройство 13 без прерывания работы. При этом ножевой брус 6 снова зажимают путем активизации исполнительных механизмов, то есть нагружения давлением гидравлических цилиндров 12, что позволяет эксплуатировать его в зафиксированном режиме.
Следующий аспект способа, описываемого изобретением, заключается в том, что во втором или третьем режиме работы при превышении жаткой 1 рабочего положения, например, на поворотной полосе или за счет ручного подъема жатки 1, управляющее устройство 50 автоматически активизирует исполнительный механизмы для перевода ножевого бруса 6 в фиксированное положение. Это гарантирует оптимальное или минимальное расстояние между мотовилом и столом жатки и позволяет мотовилу поддерживать поток культуры на оптимальном уровне. Эта функция также полезна при повторном введении навесного оборудования в убираемую культуру, так как управляющее устройство 50 ослабляет ножевой брус 6 путем соответствующей активизации исполнительных механизмов лишь непосредственно перед землей, то есть снова переводит его в гибкий режим, что распознается первым сенсорным устройством 13. В результате, например, колосоподъемники устанавливаются под правильным углом к почве вместо крутого угла, который имел бы место при повторном введении в культуры в случае немедленного ослабления ножевого бруса 6.
На фигуре 4 представлена блок-схема, иллюстрирующая возможные рабочие состояния и переходы между ними. Состояние 31 жатки 1 называют начальным состоянием, в котором ножевой брус 6 работает в фиксированном режиме. Жатка 1 работает в первом режиме работы. Соблюдение высоты среза или расстояния от жатки 1 до почвы контролируют с помощью скоб-копиров 14 первого сенсорного устройства 13.
Числом 32 обозначают состояние жатки 1, в котором жатку 1 переводят во второй режим работы с гибким управлением ножевым брусом 6. Для этого управляющее устройство 50 активизирует исполнительные механизмы таким образом, чтобы гидравлические цилиндры 12 нагружались гидравлическим давлением ниже второго предельного значения. В таком состоянии 32 соблюдение высоты среза контролируют или регулируют с учетом изменения расстояния до почвы, определяемого первым сенсорным устройством 13.
Числом 36 обозначают этап перехода от состояния 31 к состоянию 32, инициируемый в зависимости от заданного значения для управления высотой среза. Как было указано выше, выставление минимального заданного значения для скобы-копира 14 приводит к переходу из первого режима работы во второй режим работы.
Числом 37 обозначают этап перехода от состояния 32 к состоянию 31, инициируемый в зависимости от заданного значения для управления высотой среза или, в альтернативном варианте, путем подъема жатки 1 выше рабочего положения. Таким образом, этап 37 перехода из второго режима работы в первый режим работы осуществляют путем изменения заданного значения управления высотой среза с минимального заданного значения до заданного значения высоты среза для первого режима работы или ручного подъема жатки 1.
Числом 33 обозначают состояние жатки 1, в котором ножевой брус 6 работает во втором режиме работы, причем при управлении высотой используют второе сенсорное устройство 17. Для этого на этапе 38 перехода управляющее устройство 50 контролирует фактическое гидравлическое давление, которым нагружают гидравлические цилиндры 12 несущих консолей 11. При прохождении второго предельного значения давления, которым нагружают гидравлические цилиндры 12, управляющее устройство 50 отключает первое сенсорное устройство 13 и включает второе сенсорное устройство 17.
Числом 34 обозначают состояние жатки 1, в котором жатка 1 работает в другом рабочем режиме. В этом режиме работы оператор вручную поднимает жатку 1. Этот режим работы можно использовать при достижении поворотной полосы.
Числом 39 обозначают этап перехода из состояния 33 в состояние 34, инициируемый подъемом жатки 1. В соответствии с этим переходным этапом 39 управляющее устройство 50 контролирует превышение порогового значения фактической высотой среза. При превышении порогового значения высоты среза управляющее устройство 50 контролирует следующее пороговое значение, зависящее от времени. Управляющее устройство 50 контролирует длительность превышения порогового значения высоты среза.
Если будет превышен и этот зависящий от времени порог, управляющее устройство 50 инициирует этап 40 перехода. Жатка 1 будет переведена в первый режим работы в соответствии с состоянием 31. Для этого управляющее устройство 50 активизирует исполнительный механизм таким образом, чтобы перевести ножевой брус 6 в зафиксированное состояние. Кроме того, управляющее устройство 50 автоматически отключает второе сенсорное устройство 17 и включает первое сенсорное устройство 13. Этап 40 перехода регулируется в зависимости от времени и положения.
Числом 41 обозначают этап перехода от состояния 34 обратно к состоянию 33, инициируемый после подъема жатки 1, если длительность подъема жатки 1 не превышает зависящее от времени пороговое значение. На этапе 41 перехода режим работы не изменяется.
Числом 35 обозначают состояние жатки 1, в котором жатка 1 работает в другом режиме. В этом режиме работы оператор вручную опускает жатку 1. Этот режим работы может использоваться после прохождения поворотной полосы и до повторного введения жатки 1 в убираемую культуру.
Числом 42 обозначают этап перехода от состояния 31 к состоянию 35, инициируемый ручным опусканием жатки 1. В соответствии с этим этапом 42 перехода управляющее устройство 50 контролирует опускание фактической высоты среза ниже порогового значения при одновременном ручном опускании жатки 1.
По достижении состояния 35 управляющее устройство 50 контролирует следующее пороговое значение, зависящее от времени. Управляющее устройство 50 контролирует длительность опускания высоты среза ниже порогового значения. Если значение опустится ниже данного зависящего от времени порогового значения, управляющее устройство 50 инициирует этап 44 перехода. Жатка 1 будет переведена из первого режима работы в соответствии с состоянием 31 во второй режим работы в соответствии с состоянием 33. Для этого управляющее устройство 50 активизирует исполнительный механизм таким образом, чтобы перевести ножевой брус 6 в гибкий режим. Кроме того, управляющее устройство 50 автоматически отключает первое сенсорное устройство 13 и включает второе сенсорное устройство 17. Этап 44 перехода также регулируется в зависимости от времени и положения.
Числом 43 обозначают этап перехода от состояния 35 обратно к состоянию 31, инициируемый после опускания жатки 1, если длительность опускания жатки 1 не превышает зависящее от времени пороговое значение. Во время этапа 43 перехода режим работы не изменяется.
По существу, этот способ можно также использовать, если подъем и опускание жатки 1 выполняется автоматически. Достижение и покидание, например, поворотной полосы можно определять с помощью системы позиционирования, что позволяет автоматизировать переключение режимов работы.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 жатка
2 основная рама
3 центральная часть
4 боковая часть
5 транспортирующее устройство
6 ножевой брус
7 лента
7а транспортер
8 втягивающее устройство
9 втягивающий ролик
10 наклонная камера
11 несущая консоль
12 гидравлический цилиндр
13 первое сенсорное устройство
14 скоба-копир
15 опорный участок
16 ось поворота
17 второе сенсорное устройство
18 вал
19 консоль
20 рычажное устройство
21 этап
22 этап
23 этап
24 этап
31 состояние
32 состояние
33 состояние
34 состояние
35 состояние
36 этап перехода
37 этап перехода
38 этап перехода
39 этап перехода
40 этап перехода
41 этап перехода
42 этап перехода
43 этап перехода
44 этап перехода.
Реферат
Группа изобретений относится к способу работы жатки, жатке, реализующей заявленный способ, и зерноуборочному комбайну с вышеуказанной жаткой. Способ работы жатки, содержащей ножевой брус, работающий в жестком или гибком режиме в зависимости от условий уборки, и выполненной с возможностью работы, по меньшей мере, в двух различных режимах, заключается в том, что в первом режиме работы ножевой брус направляют над почвой на предварительно заданной высоте резания, а во втором режиме работы ножевой брус прилегает к почве, отслеживая контур земли, при этом раму жатки перемещают на заданном расстоянии от почвы. При этом при переключении между по меньшей мере двумя режимами работы первое или второе сенсорные устройства активируют для определения расстояния, не прерывая работы. Жатка содержит ножевой брус, выполненный с возможностью перевода в фиксированный или гибкий режим работы в зависимости от условий уборки, первое сенсорное устройство, предназначенное для эксплуатации жатки в первом режиме работы, и второе сенсорное устройство, предназначенное для эксплуатации жатки во втором режиме работы. Причем в первом режиме работы ножевой брус направляется над почвой на предварительно заданной высоте резания, а во втором режиме работы ножевой брус эксплуатируется в гибком режиме, при котором он прилегает к почве, отслеживая контур земли, в то время как рама жатки перемещается на заданном расстоянии от почвы, при этом активация первого сенсорного или второго сенсорных устройств осуществляется без прерывания работы жатки. Зерноуборочный комбайн содержит данную жатку, позволяющую реализовать вышеуказанный способ уборки злаковых. Способ работы жатки и устройство жатки обеспечивают возможность более гибкого реагирования на изменяющиеся условия уборки урожая. 3 н. и 12 з.п. ф-лы, 4 ил.
Формула
Документы, цитированные в отчёте о поиске
Устройство для сбора сельскохозяйственной культуры уборочной жатки
Комментарии