Способ получения данных из глубинной формации земли и устройство для его осуществления, способ непрерывного получения данных из местоположения внутри глубинной формации земли (варианты), способ измерения параметров формации и способ считывания данных о фо - RU2178520C2
Код документа: RU2178520C2
Чертежи



Описание
Изобретение относится, в основном, к бурению глубоких скважин, например, для добычи нефтяных продуктов и более конкретно относится к получению данных о глубинной формации, таких как пластовое давление, пластовая проницаемость и им подобных, при одновременном проведении операций по бурению скважины.
При описании нефтяных скважин одна часть стандартных параметров оценки формации относится к пластовому давлению и проницаемости породы-коллектора. При операциях в настоящее время эти параметры получаются либо путем скважинных исследований опробователем пласта, опускаемым на тросе, либо путем опробований испытателем пласта. Оба типа измерений пригодны для применений в открытом стволе и обсаженном стволе и требуют дополнительного рейса, т. е. удаления бурильной колонны из ствола скважины, спуска опробователя пласта в ствол скважины для получения данных о формации и после поднятия из скважины опробователя пласта спуска бурильной колонны обратно в ствол скважины для дальнейшего бурения. Ввиду того, что спуско-подъемная операция в скважине таким способом использует значительное количество дорогого времени буровой установки, это обычно делается при обстоятельствах, когда данные о формации являются абсолютно необходимыми, или это делается, когда спуско-подъемная операция выполняется для замены бурового долота, или по другим причинам.
В период активного бурения скважины, наличие данных о формации коллектора на текущее время является ценным качеством. Пластовое давление в текущее время, полученное в процессе бурения, позволит буровому инженеру или бурильщику принимать решения, касающиеся изменений нагрузки бурового раствора и состава, а также параметров проходки в значительно более короткое время с тем, чтобы способствовать требованиям безопасности при бурении. Наличие данных о формации коллектора на текущее время является также желательным, чтобы сделать возможным точный контроль за нагрузкой на буровое долото в связи с изменениями пластового давления и изменениями в проницаемости так, чтобы буровые операции могли проводиться с максимальной эффективностью.
Желательно, следовательно, обеспечить способ и устройство для бурения, которые способны к получению различных данных о формации из глубины зоны, представляющий интерес, в то время как бурильная колонна со своими утяжеленными бурильными трубами, буровым долотом и другими бурильными принадлежностями находятся внутри ствола буровой скважины, таким образом устраняя или сводя к минимуму потребность в спуско-подъемной операции бурового оборудования скважины с единственной целью спуска опробователя пласта в ствол скважины для определения этих параметров формации. Является также желательным обеспечить способ и устройство для бурения скважины, которые способны получать параметры данных о формации, такие как давление, температура, проницаемость и пр. , при одновременном проведении бурения скважины, и выполнять это в соответствии со всеми известными способами бурения ствола скважины.
Обращаясь к этим назревшим нуждам в промышленности, принципиальной задачей настоящего изобретения является обеспечение нового способа и устройства для получения данных о глубинной формации в соответствии с операциями бурения ствола скважины без необходимости спуско-подъемной операции бурильной колонны из ствола скважины.
Другой задачей настоящего изобретения является обеспечение нового способа и устройства для получения данных о глубинной формации во время буровых операций.
Следующей задачей настоящего изобретения является обеспечение нового способа и устройства для получения данных о глубинной формации при одновременном проведении бурения ствола скважины.
Другой задачей настоящего изобретения является обеспечение нового способа и устройства для получения данных о глубинной формации путем помещения дистанционного датчика/трансмиттера внутри глубинной формации примыкающей к стволу скважины, селективного активирования дистанционного датчика данных для считывания, регистрации и передачи данных о формации и селективного приема переданных о формации с помощью системы буровых штанг для представления буровому персоналу.
Следующей задачей настоящего изобретения является создание такого нового способа и устройства с помощью одного или большего числа дистанционных разумных датчиков данных о формации, который позволит осуществить передачу данных о формации на основе текущего времени приемнику данных в утяжеленной бурильной трубе или зонде, который является частью бурильной колонны и обладает способностью передачи принятых данных через бурильную колонну к поверхностной аппаратуре для представления буровому персоналу.
Задачи, описанные выше, как и различные преимущества достигаются способом и устройством, которыми предполагается бурение ствола скважины бурильной колонной, имеющей утяжеленную бурильную трубу с буровым долотом, соединенным с ней. Утяжеленная бурильная труба содержит систему приема данных о формации и один или большее количество дистанционных датчиков данных, которые способны считывать и регистрировать данные о формации, такие как температура, давление, проницаемость, проч. , и передавать сигналы, представляющие считанные данные. Когда утяжеленная бурильная труба примыкает к выбранной подъемной формации, такой как формация коллектора, устройство утяжеленной бурильной трубы активизируется к месторасположению по крайней мере одного датчика данных внутри подземной формации, находящейся снаружи за пределами ствола скважины, для считывания и передачи данных о формации по команде. Сигналы данных о формации, переданные датчиком данных, принимаются с помощью схемы принимающего устройства, расположенного в утяжеленной бурильной трубе, и далее передаются через бурильную колонну на поверхностную аппаратуру, такую как пульт бурильщика, где данные о формации воспроизводятся. Оперируя изменениями данных о формации, считанными и воспроизведенными, буровой персонал способен быстро и эффективно привести в соответствие условия забоя ствола скважины, такие как нагрузка бурового раствора и состав, нагрузка на долото, и другие переменные показатели, чтобы контролировать безопасность и эффективность буровой операции.
Датчик разумных данных может располагаться внутри формации, представляющей интерес c помощью любого подходящего средства. Например, плунжер с гидравлическим усилителем может продвинуть датчик из утяжеленной бурильной трубы в формацию с достаточной гидравлической силой для того, чтобы датчик проник в формацию на достаточную глубину для считывания данных о формации. В альтернативе, устройство в утяжеленной бурильной трубе может простираться снаружи бура или горизонтально в формацию с датчиком, который в таком случае помещается внутри бокового ствола с помощью привода датчика. В качестве следующей альтернативы, система, приводимая в действие движущей силой, расположенная в утяжеленной бурильной трубе, может быть приведена в действие, чтобы пробить датчик с достаточной силой для того, чтобы он проник в формацию горизонтально вне ствола скважины. Датчик соответственно капсулируется, чтобы противостоять повреждению во время своей горизонтальной установки в формацию, каким бы ни был способ установки в формацию.
Чтобы сделать возможным получение и передачу данных о формации, датчик обеспечивается электроэнергетической системой, которая может быть батарейной системой или системой индуктивного переменного тока, идущего от механического картриджа, который находится в утяжеленной бурильной трубе. Микро-чип в датчиковом устройстве сделает возможным, чтобы электрическая схема осуществляла хранение данных, управляла процессом измерения параметра или параметров выбранной формации и передавала записанные данные в приемную электрическую схему картриджа данных о формации, находящегося в утяжеленной бурильной трубе. Сигналы данных о формации обрабатываются электрической схемой для данных о формации в механическом картридже в форму, которая может быть послана на поверхность через бурильную колонну или любой другой подходящей системой для передачи данных с тем, чтобы сигналы данных можно было показывать буровому персоналу и наблюдать их (обычно на пульте бурильщика буровой установки). Изменение данных на забое скважины во время бурового процесса будет известно или на основе текущего времени, или с частотой, которая выбирается буровым персоналом, делая таким образом возможным буровую операцию, которая будет проводиться в соответствии с параметрами, которые существуют в любой момент времени.
С тем, чтобы способ, которым вышеперечисленные признаки, преимущества и задачи настоящего изобретения достигаются и который может быть понят в деталях, более конкретное описание изобретения, кратко изложенное выше, может быть представлено в его предпочтительном варианте, который иллюстрируется чертежами.
Следует отметить, однако, что приведенные чертежи иллюстрируют только типичный вариант этого изобретения и, следовательно, не могут рассматриваться как ограничивающие его объем, для изобретения могут допускаться другие в равной степени эффективные варианты.
Фиг. 1 является диаграммой утяжеленной бурильной трубы, находящейся в стволе скважины с секцией датчик трансмиттерного зонда данных согласно настоящему изобретению.
Фиг. 2 является схематической иллюстрацией секции датчик трансмиттерного зонда данных утяжеленной бурильной трубы, имеющего систему с гидравлическим приводом для принудительного внедрения дистанционного датчика/трансмиттера из ствола скважины в выбранную глубинную формацию.
Фиг. 3 является диаграммой, схематично представляющей утяжеленную бурильную трубу, имеющую в ней механический картридж, который снабжен электронной схемой для приема сигналов данных о формации от дистанционного датчика/трансмиттера данных о формации.
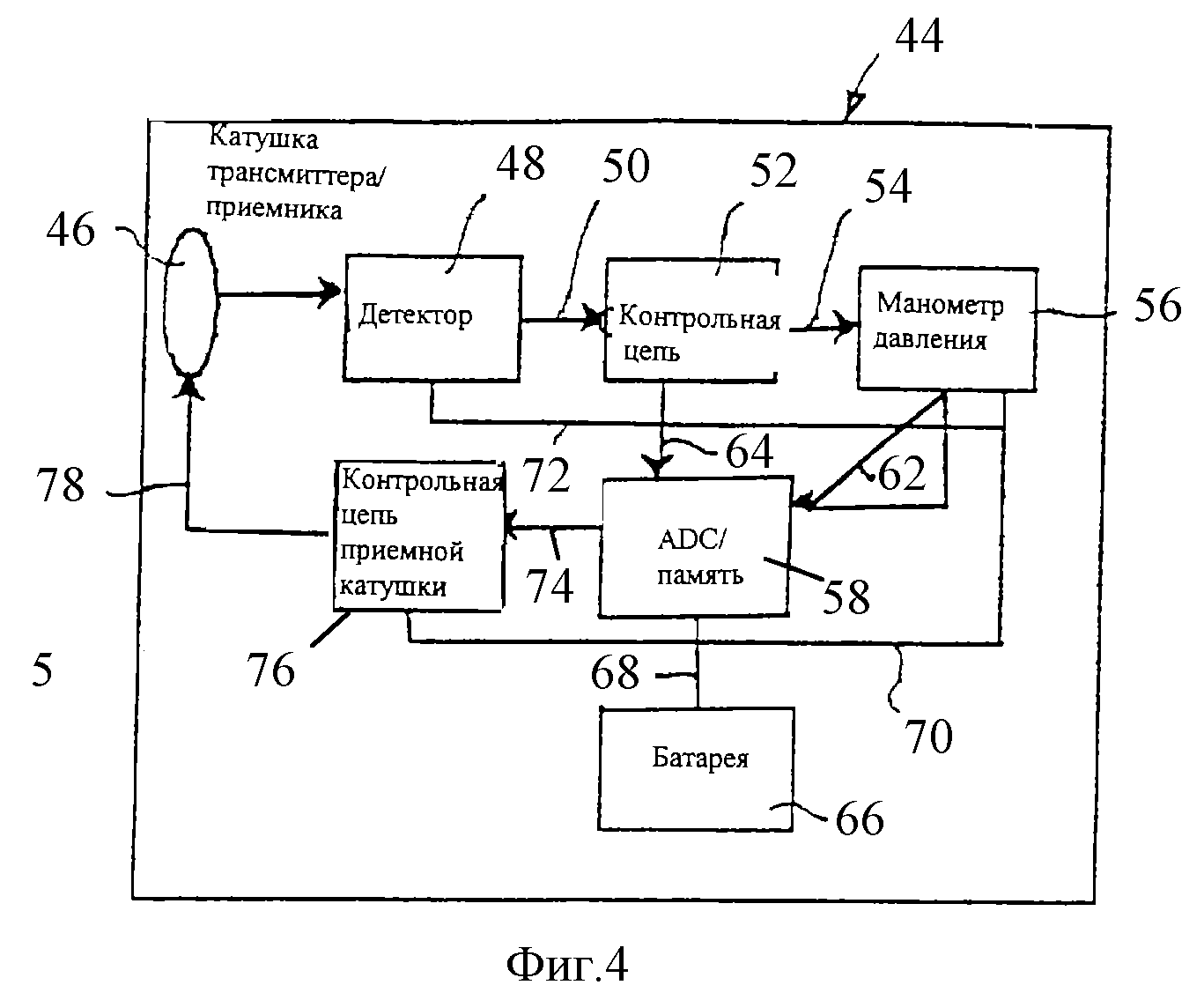
Фиг. 4 является электронной блок-диаграммой, схематично показывающей дистанционный датчик, который устанавливается внутри выбранной глубинной формации из скважины, находящейся в процессе бурения, и который считывает один или больше параметров данных о формации, таких как давление, температура, проницаемость горной породы, помещает данные в память и, согласно команде, передает накопленные данные в схему механического картриджа утяжеленной бурильной трубы.
Фиг. 5 является электронной блок-диаграммой, схематично иллюстрирующей схему приемной катушки дистанционного датчика/трансмиттера данных.
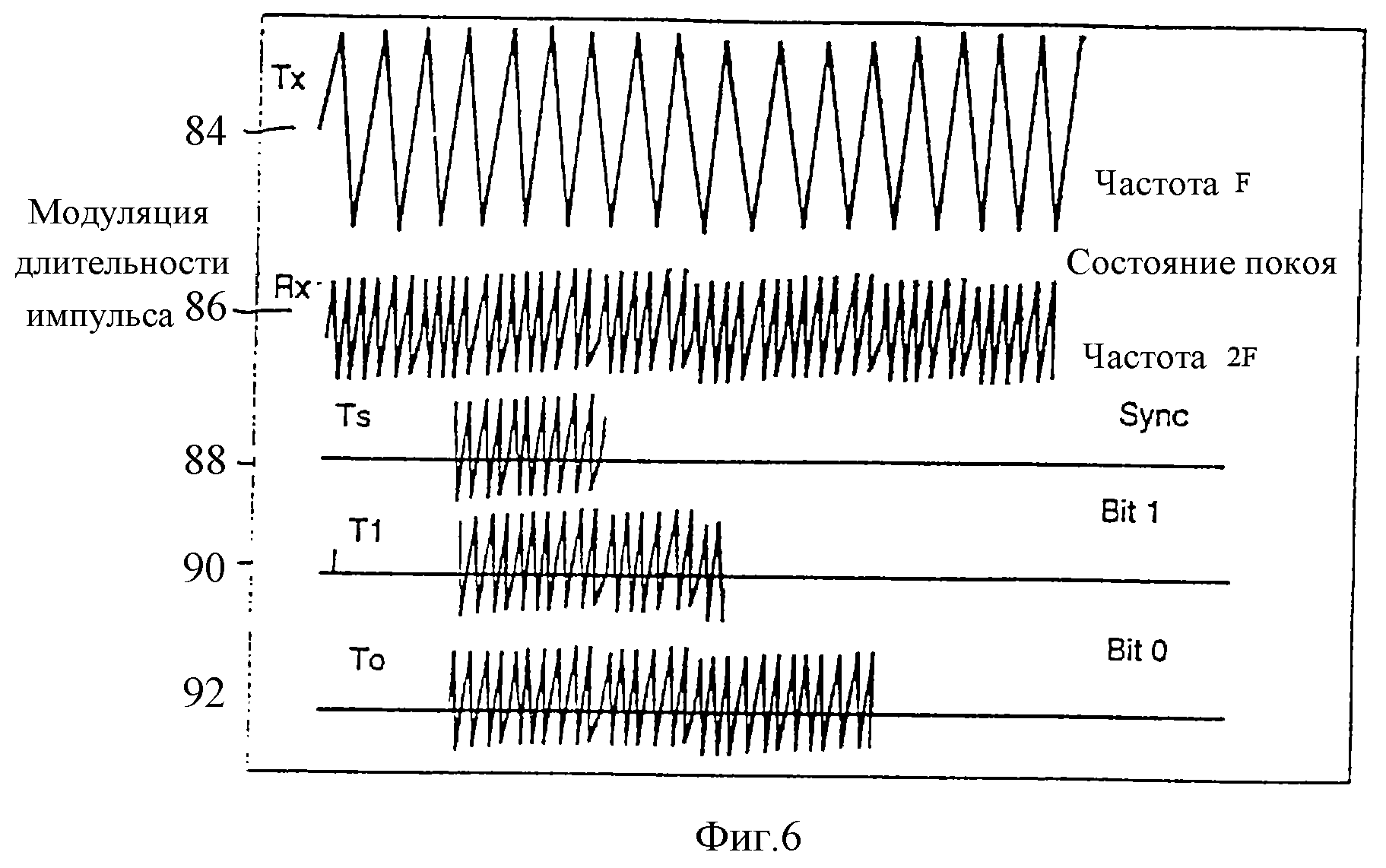
Фиг. 6 является диаграммой синхронизации прохождения звука, показывающей модуляцию длительности импульса.
Утяжеленная бурильная труба 10, являющаяся компонентом бурильной колонны для бурения ствола скважины (фиг. 1-3), представляет предпочтительный вариант изобретения. Утяжеленная бурильная труба обеспечивается секцией 12 зонда, имеющей механический картридж 14, включающий схему трансмиттера/приемника фиг. 3. Утяжеленная бурильная труба 10 также обеспечивается манометром 16 давления, имеющим датчик 18 давления, который подвергается давлению в стволе скважины через проход 20 утяжеленной бурильной трубы. Манометр давления считывает окружающее давление на глубине выбранной глубинной формации и используется для проверки калибровки давления дистанционных датчиков. Электронные сигналы, представляющие давление окружающей среды ствола скважины, передаются через манометр 16 давления в схему механического картриджа 14, который, в свою очередь, выполняет калибровку давления дистанционного датчика, будучи приведен в действие на конкретной глубине ствола скважины. Утяжеленная бурильная труба 10 обеспечивается также одним или большим количеством гнезд 22 дистанционных датчиков, каждое из которых содержит дистанционный датчик 24 для установки внутри выбранной глубинной формации, представляющей интерес, которая пересекается скважиной, находящейся в бурении.
Дистанционные датчики 24 являются капсулированными "разумными" датчиками, которые передвигаются из утяжеленной бурильной трубы в месторасположение внутри формации, окружающей ствол скважины, для считывания параметров формации, таких как давление, температура, проницаемость горной породы, пористость, проводимость и диэлектрическая постоянная в частности. Датчики соответственно капсулируются в датчиковые кожухи структурно достаточно целостные, чтобы противостоять повреждению во время продвижения из утяжеленной бурильной трубы в направление горизонтального внедрения в глубинную формацию, окружающую ствол скважины. Специалистами в данной области будет признано, что не требуется, чтобы такое горизонтальное внедряющее движение было перпендикулярным относительно ствола скважины, но может выполняться с различными углами продвижения в желаемое положение формации. Приведение датчика в рабочее положение может достигаться использованием одной или комбинацией следующих стадий: (1) бурение стенки ствола скважины и помещение датчика в формацию; (2) пробивание/прессование капсулированных датчиков в формацию гидравлическим прессом или механическим агрегатом для пенетрации; или (3) выстреливание капсулированных датчиков в формацию применением зарядов, инициирующих движение.
Как показано на фиг. 2, применяется плунжер 30 с гидравлическим приводом, чтобы привести в рабочее положение датчик 24 и вызвать его проникновение в глубинную формацию в месторасположение, достаточно удаленное от ствола скважины, чтобы он считывал выбранные параметры формации. Для приведения датчика в рабочее положение утяжеленная бурильная труба обеспечивается внутренним цилиндрическим проходным отверстием 26, внутри которого помещается поршневой элемент 28, имеющий плунжер 30, который находится в подвижной связи с капсулированным дистанционным разумным датчиком 24. Поршень 28 подвергается гидравлическому давлению, которое передается в камеру 32 поршня из гидравлической системы 34 через гидравлический подводящий канал 36. Гидравлическая система селективно активируется механическим картриджем 14 так, что дистанционный датчик можно калибровать относительно давления окружающей среды скважины на глубине формации, как описано выше, и можно затем передвигать из гнезда 22 в формацию за пределы стенки ствола скважины так, что параметры давления формации будут свободны от влияний ствола скважины.
На фиг. 3 механический картридж 14 утяжеленной бурильной трубы 10 включает по крайней мере одну трансмиттерную/приемную катушку 38, имеющую трансмиттерный механический привод 40 в виде усилителя мощности с собственной частотой F, установленной осциллятором 42. Секция зонда утяжеленной бурильной трубы также обеспечивается настроенным приемным усилителем 43, который устанавливается для приема сигналов на частоте 2F, которые будут передаваться в секцию зонда утяжеленной бурильной трубы дистанционным датчиком 24 типа "крепкая пуля", как будет объяснено ниже.
На фиг. 4 электронная схема дистанционного "крепкого датчика" показывается блок-диаграммой 44 и обычно включает по крайней мере одну трансмиттерную/приемную катушку 46 или RF антенну с приемником его, который обеспечивает выход 50 из детектора 48 в цепь 52 управления. Цепь управления обеспечивается одним из ее контролирующих выходов 54, который подводится к манометру 56 давления так, чтобы выходные сигналы манометра подавались на аналого-цифровой преобразователь ("ADC")/память 58, который принимает сигналы от манометра давления через проводник 62 и также принимает контрольные сигналы от цепи управления 52 через проводник 64. Предусматривается батарея 66 внутри дистанционной схемы 44 датчика и связывается с различными компонентами схемы датчика электрическими проводниками 68, 70 и 72. Выход памяти 74 цепи 58 ADC/памяти подводится к цепи 76 управления приемной катушки. Цепь 76 управления приемной катушки функционирует как приводная цепь через проводник 78 для катушки 46 трансмиттера/приемника для передачи данных в зонд 12.
На фиг. 5 низкопороговый диод 80 соединяется параллельно с цепью 76 управления Rx катушки. При обычных условиях и особенно в условиях пассивного или "спящего" режима работы электронный переключатель 82 выключается, сводя к минимуму потребление энергии. Когда цепь 76 управления приемной катушки активизируется переданным электромагнитным полем утяжеленной бурильной трубы, в цепи 76 управления приемной катушки индуцируются напряжение и электрический ток. В этот момент, однако, диод 80 будет позволять электрическому току протекать только в одном направлении. Эта нелинейность изменяет основную частоту F индуцированного электрического тока, показанную цифрой 84 на фиг. 6, в электрический ток, имеющий основную частоту 2F, т. е. двойную частоту электромагнитной волны 84, как показано на фиг. 6 (поз. 86).
В пределах полной последовательности передачи катушка 38 трансмиттера/приемника, показанная на фиг. 3, также используется в качестве приемника и соединяется с приемным усилителем 43, который настраивается на частоту 2F. Когда амплитуда принимаемого сигнала является максимальной, дистанционный датчик 24 находится в непосредственной близости для оптимального прохождения сигнала между утяжеленной бурильной трубой и дистанционным датчиком.
Предполагая, что разумный дистанционный датчик или "крепкая пуля", как его также называют, помещается внутри формации, чтобы им управляли, последовательность, с которой передача и получение электронных сигналов функционирует совместно с буровыми операциями, является следующей.
Утяжеленная бурильная труба с ее принимающими датчиками размещается в непосредственной близости от дистанционного датчика 24. Электромагнитная волна с частотой F, как показано 84 на фиг. 6, передается от катушки 38 трансмиттера/приемника в утяжеленной бурильной трубе для включения дистанционного датчика, рассматриваемого также в качестве мишени, и индуцирования датчика, чтобы послать обратно определяющий закодированный сигнал. Электромагнитная волна инициирует электронику датчика, чтобы войти в режим работы получения и передачи, и данные давления и другие данные, представляющие параметры выбранной формации, так же как определительный код датчика, получаются на уровне дистанционного датчика. Присутствие мишени, т. е. дистанционного датчика, обнаруживается отраженной волной, которая рассеивается от мишени с частотой 2F, как показано позицией 86 на диаграмме синхронизации передачи (фиг. 6). В то же самое время получаются данные манометра давления (давление и температура) и другие параметры выбранной формации и электроника дистанционного датчика преобразует данные в один или большее количество сериальных цифровых сигналов. Этот цифровой сигнал или сигналы, так как возможен любой случай, передаются от дистанционного датчика обратно к утяжеленной бурильной трубе через катушку 46 трансмиттера/приемника. Это достигается синхронизацией и кодированием каждого индивидуального бита данных в специфическую временную последовательность, во время которой рассеянная частота будет переключаться между F и 2F. Получение данных и передача прекращаются после того, как получены стабильные показания давления и температуры и успешно переданы на коммутаторную схему утяжеленной бурильной трубы 10.
Когда бы вышеупомянутая последовательность ни возникала, катушка 38 трансмиттера/приемника, расположенная внутри утяжеленной бурильной трубы или секции зонда утяжеленной бурильной трубы, приводится в действие механическим приводом трансмиттера или усилителя 40. Электромагнитная волна передается от утяжеленной бурильной трубы с частотой F, установленной осциллятором 42, как показано на диаграмме синхронизации 84 (фиг. 6). Частота F может выбираться в пределах диапазона от 100 кГц до 500 МГц. Как только мишень попадает в зону влияния трансмиттера в утяжеленной бурильной трубе, катушка 46 приемника, находящаяся внутри крепкой пули, будет излучать обратно электромагнитную волну двойной первоначальной частоты посредством цепи 76 управления приемной катушки и катушки 46 трансмиттера/приемника.
В противоположность известным операциям настоящее изобретение делает доступными данные давления и другие параметры формации, получаемые во время бурения, и, по существу, позволяет буровому персоналу скважины принимать решения, касающиеся нагрузки бурового раствора и состава, так же как других параметров, в значительно более короткое время в процессе бурения без необходимости совершать спуско-подъемную операцию бурильной колонны с целью спуска инструмента для опробования пласта. Настоящее изобретение требует намного меньше затрат времени для проведения фактических измерений формации; как только дистанционный датчик приведен в рабочее положение, можно получать данные во время бурения, свойство, которое не является возможным согласно известным техническим приемам бурения скважины.
Временной контроль за давлением формаций, пронизанных стволом скважины, может также достигаться, пока данные давления от датчика 18 давления являются доступными. Это свойство зависит, конечно, от соединительного звена между схемой трансмиттера/ приемника внутри механического картриджа утяжеленной бурильной трубы и любыми приведенными в рабочее положение разумными дистанционными датчиками.
Выходные данные дистанционного датчика могут также считываться с каротажных зондов, спускаемых на тросе во время стандартных каротажных операций. Этот признак изобретения позволяет разнообразить параметры данных о глубинной формации, которые будут получены с помощью электроники каротажного зонда в дополнение к данным текущего времени о глубинной формации, которые теперь можно получать из формации во время бурения.
При размещении разумных дистанционных датчиков 24 вне непосредственного окружения ствола скважины, по крайней мере в начальный период получения данных, не произойдет воздействия ствола скважины на произведенные измерения давления. Так как является необходимым отсутствие движения жидкости для получения пластовых давлений, будет возможным измерять пластовое давление датчиками на месте в непроницаемых горных породах. Специалисты в данной области оценят, что настоящее изобретение одинаково применимо для измерения нескольких параметров формации, таких как проницаемость, проводимость, диэлектрическая постоянная, прочность горной породы и других, и не ограничивается измерением пластового давления.
Кроме того, настоящим изобретением и в пределах его объема предполагается, что дистанционный датчик, однажды приведенный в рабочее положение, может обеспечить источник данных о формации в течение значительного периода времени. С этой целью необходимо, чтобы местоположение соответствующих датчиков было определимо. Таким образом, в одном варианте дистанционные датчики будут содержать радиоактивные импульс-наконечники, которые являются определяемыми посредством приспособления, регистрирующего гамма- лучи, или зонда вместе с гигроскопическим устройством в инструментальной колонне, который повышает определение местоположения и индивидуальную пространственную идентификацию каждого приведенного в рабочее положение датчика в формации.
Ввиду вышеприведенного, является очевидным, что настоящее изобретение хорошо адаптируется для достижения всех целей и особенностей, изложенных выше, вместе с другими целями и особенностями, которые присущи устройству, раскрытому здесь.
Как должно быть совершенно очевидно специалистам в этой области, настоящее изобретение может быть осуществлено в других специфических вариантах без отклонения от его сущности и основных характеристик. Настоящий вариант, следовательно, должен рассматриваться как просто иллюстративный, а не ограничивающий. Объем изобретения определяется формулой изобретения, и все изменения в пределах значения и диапазона эквивалентности формулы изобретения должны быть, следовательно, в нее включенными.
Реферат
Изобретение касается бурения и может быть использовано для получения данных от дистанционных датчиков во время бурения. Бурение ствола скважины осуществляется бурильной колонной, имеющей утяжеленную бурильную трубу (УБТ). В УБТ расположен зонд, имеется датчик данных (ДД). Последний приспособлен для дистанционного размещения внутри выбранной глубинной формации (ВГФ) и предназначен для восприятия параметров ВГФ и передачи их к приемнику, то есть представляет собой дистанционный разумный датчик. Тем или иным образом перемещают ДД из УБТ в ВГФ для считывания таким образом данных о ней. Осуществляют передачу сигналов, представляющих данные о ВГФ, от ДД и прием переданных сигналов с последующим определением различных параметров формации. Перед считыванием и передачей данных ДД может быть инициирован. Изобретение позволит получать данные о формации с помощью по крайней мере одного дистанционного разумного датчика во время буровых операций. 6 с. и 14 з. п. ф-лы, 6 ил.

Комментарии