Распределенное акустическое измерение для пассивной дальнометрии - RU2661747C2
Код документа: RU2661747C2
Чертежи




Описание
Область техники
Настоящее изобретение относится к скважинным буровым работам и, более конкретно, к способам и системам для слежения за положением множества скважин относительно друг друга в процессе бурения. Более конкретно, настоящее изобретение относится к способам и системам для пассивного определения положения целевой скважины относительно пробуриваемой скважины с использованием распределенного акустического датчика, расположенного в целевой скважине.
Уровень техники
Поскольку наиболее легкие для доступа и добычи ресурсы углеводородов в настоящее время истощены, существует повышенная потребность в более прогрессивных технологиях извлечения углеводородов. Одной из таких технологий является гравитационный дренаж с применением пара (steam assisted gravity drainage, SAGD), при котором применяют пар одновременно в двух скважинах, расположенных на расстоянии друг от друга. В частности, SAGD решает проблему подвижности тяжелой нефти в формации путем нагнетания в нее высокотемпературного пара высокого давления. Этот высокотемпературный пар высокого давления уменьшает вязкость тяжелой нефти с целью облегчения ее извлечения. Нагнетание пара в формацию осуществляют из первой (нагнетающей) скважины, которую пробуривают выше и параллельно второй (добывающей) скважине. Когда вязкость тяжелой нефти в формации вокруг первой скважины понижается, эта тяжелая нефть стекает в расположенную ниже добывающую скважину, из которой эту нефть извлекают. В одном или более вариантах две скважины пробуривают на расстоянии всего лишь нескольких метров друг от друга. Расположение нагнетающей скважины должно предполагать очень малый допуск по расстоянию. Если нагнетающая скважина расположена слишком близко к добывающей скважине, добывающая скважина будет подвергаться воздействию очень высоких давления и температуры. Если нагнетающая скважина расположена слишком далеко от добывающей скважины, эффективность технологии SAGD снижается. С целью обеспечения поддержки бурения и расположения второй скважины желаемым образом относительно первой скважины часто проводят инклинометрию двух этих скважин в формации. Эти методики инклинометрии традиционно именуются "дальнометрией".
Для определения направления и расстояния между двумя скважинами применялись электромагнитные (ЭМ) системы и способы. В ЭМ дальномерных системах в одной из скважин размещают продолговатую электропроводную колонну труб, такую как обсадная колонна скважины. Эта скважина обычно именуется "целевой" скважиной и обычно представляет собой нагнетающую скважину для SAGD. В любом из вариантов, подают ток в электропроводную колонну труб целевой скважины с помощью низкочастотного источника тока. Токи протекают по обсадке скважины и утекают в формацию. Эти токи индуцируют ЭМ поле вокруг целевой скважины. ЭМ поля, индуцированные токами в обсадке целевой скважины, измеряют с помощью системы измерения электромагнитного поля, размещенной в другой скважине, которая обычно представляет собой скважину, находящуюся в процессе бурения. Эта вторая скважина обычно представляет собой добывающую скважину для SAGD. Измеренное магнитное поле затем может быть использовано для определения расстояния, направления и угла между двумя скважинами. Дальномерные системы, в которых ток инжектируется в целевую скважину с целью индуцирования магнитного поля, именуются "активными" дальномерными системами.
Было бы эффективно обеспечить "пассивную" дальномерную систему, в которой устранена необходимость инжекции тока в целевую скважину.
Краткое описание чертежей
Различные варианты реализации настоящего изобретения станут более понятны из приведенного ниже подробного описания и сопроводительных чертежей различных вариантов реализации настоящего изобретения. На чертежах одинаковыми номерами могут быть обозначены идентичные или функционально одинаковые элементы. Чертеж, на котором элемент появляется впервые, обычно обозначается первой цифрой соответствующего ссылочного номера.
ФИГ. 1 иллюстрирует вариант пассивной дальномерной системы для буровых работ по технологии SAGD, имеющей оптическое волокно, размещенное вдоль целевой скважины, и источник звука, размещенный в пробуриваемой скважине.
ФИГ. 2 иллюстрирует вариант пассивной дальномерной системы для работы в наклонной скважине; эта система имеет оптическое волокно, размещенное вдоль целевой скважины, и источник звука, размещенный в пробуриваемой скважине.
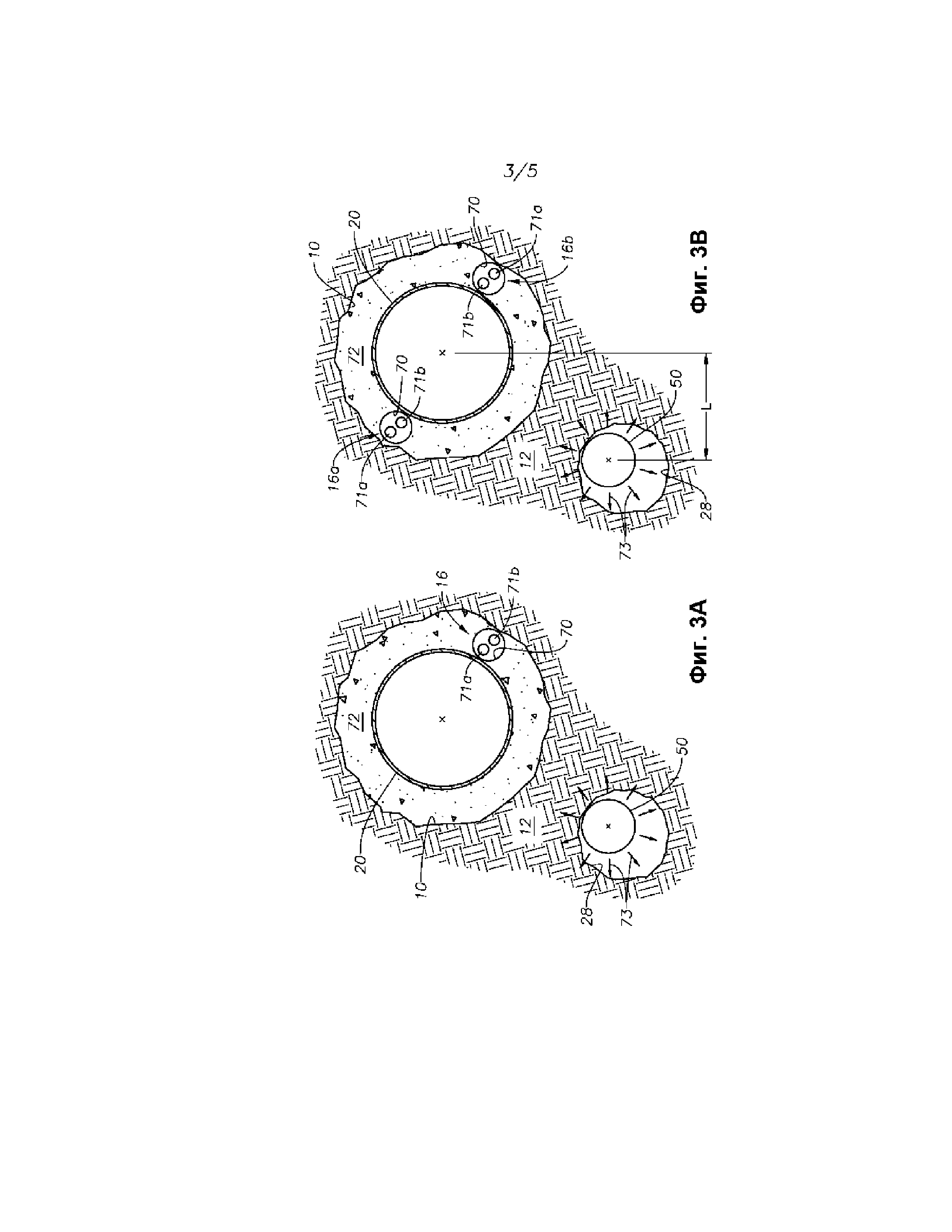
ФИГ. 3а иллюстрирует вариант с одиночным оптическим волноводом, используемый в пассивной скважинной дальномерной системе.
ФИГ. 3b иллюстрирует вариант с множеством оптических волноводов, используемый в пассивной скважинной дальномерной системе.
ФИГ. 3с иллюстрирует вариант с одиночным оптическим волноводом, размещенным на буровом снаряде или колонне труб и акустически связанным с формацией.
На ФИГ. 4 показана блок-схема одного из вариантов способа пассивной дальнометрии с использованием оптического волокна, размещенного вдоль целевой скважины, и источника звука, размещенного в пробуриваемой скважине.
Подробное описание изобретения
В нижеследующем описании цифровые и/или буквенные обозначения в различных примерах могут повторяться. Цель этого повторения обозначений заключается в упрощении и повышении ясности описания, а само по себе повторение не означает соответствия между различными раскрытыми вариантами реализации изобретения и/или конфигурациями. Кроме того, термины пространственного отношения, такие как "под", "ниже", "нижний", "над", "верхний", "выше", "подземный", "ранее по потоку", "далее по потоку" и т. п., могут быть использованы в данном документе для упрощения описания положения или признака одного элемента относительного другого элемента (элементов), как показано на чертежах. Эти термины пространственного отношения предназначены для охвата различных ориентаций устройства во время использования или эксплуатации, в дополнение к ориентации, изображенной на чертежах. Например, если устройство на чертежах изображено в перевернутом положении, элементы, ранее описанные как находящиеся "под" другими элементами или признаками, или "ниже" их, будут в этом случае находиться "над" другими элементами или признаками. Таким образом, приведенный в качестве примера термин "ниже" может относиться к обеим ориентациям с положением как "выше", так и "ниже". Устройство может быть ориентировано иначе (повернуто на 90 градусов или иметь другие ориентации), и используемые в данном документе термины описания пространственного отношения могут интерпретироваться соответствующим образом, аналогично предыдущему примеру.
Обратимся сначала к фиг. 1 и 2, показывающим первую скважину 10, проходящую через различные пласты породы, включая формацию 12. Первая скважина 10 включает установленную в ней акустическую дальномерную систему 14, содержащую по меньшей мере один оптический волновод 16, размещенный по существу вдоль части длины скважины 10. Как будет описано более подробно здесь же, акустическая дальномерная система 14 использует оптический волновод 16 в качестве распределенного акустического датчика (distributed acoustic sensor, DAS) для определения направлений и расстояний до подповерхностных инфраструктур, таких как другая скважина. DAS-система обеспечит возможность измерения в реальном времени акустического сигнала, поступающего в первую скважину. Такой акустический сигнал будет создавать вибрации (например, флуктуации давления или механического напряжения) в оптическом волноводе. Благодаря обнаружению вибраций, создаваемых аномалиями в оптическом волноводе, обеспечена возможность определения расстояния, направления и ориентации оптического волновода в конкретной точке вдоль этого оптического волновода относительно источника акустического сигнала. Хотя настоящее изобретение не ограничивается конкретным способом измерения акустического сигнала, в одном или более вариантах способ измерения динамических акустических/вибрационных возмущений с высокочастотной характеристикой (частота дискретизации ~ 1 Гц до ≥ 10 кГц) в оптическом волноводе представляет собой определение когерентного рэлеевского обратного рассеяния. Аналогичным образом, в одном или более вариантах способ измерения статических возмущений механического напряжения/плотности в оптическом волноводе представляет собой определение моделированного бриллюэновского обратного рассеяния.
В одном или более вариантах, вдоль скважины 10 может быть размещено множество оптических волноводов. Множество оптических волноводов может быть размещено на расстоянии друг от друга вокруг скважины 10 с образованием двумерной матрицы. В одном или более вариантах множество оптических волноводов может быть размещено под различными азимутами вокруг скважины 10. В контексте данного описания термин "оптический волновод" включает один или более оптических волноводов (таких как оптическое волокно (волокна), оптическая лента (ленты) и другие типы оптических волноводов), и дополнительно может включать любую оболочку или корпус, размещенный вокруг оптического волновода. Кроме того, волновод может быть одномодовым или многомодовым.
В одном или более вариантах оптические волноводы 16 могут быть размещены таким образом, чтобы находиться в непосредственном или косвенном контакте с формацией 12. В этой связи, скважина 10 может быть обсаженной или необсаженной. В случае если скважина 10 является обсаженной, т.е. имеет обсадку 20, в одном или более вариантах оптический волновод 16 закрепляют или иным образом размещают на внешней поверхности обсадки 20. Специалистам в данной области техники будет очевидно, что обсадка 20 может быть зацементирована прямо на месте внутри скважины 10, и в этом случае оптическое волокно 16 может быть размещено в цементе. Как в случае обсаженной, так и в случае необсаженной скважины, в одном или более вариантах оптический волновод 16 может быть размещен в косвенном контакте с формацией 12 через звукопроводящий элемент (такой, как показан на фиг. 3с), который обеспечивает акустическую связь между оптическим волноводом 16 и формацией 12. Кроме того, оптический волновод 16 может быть установлен внутри скважины 10 временно или постоянно.
В состоянии оптической связи с оптическим волноводом 16 размещена оптическая система 26 опроса. В некоторых вариантах система опроса может возбуждать оптический сигнал вдоль оптического волокна. В некоторых вариантах оптический сигнал может представлять собой импульсный свет, такой как импульсный лазерный свет. В одном или более вариантах волоконно-оптическая система 26 опроса может представлять собой детектор бриллюэновского обратного рассеяния, который обнаруживает и регистрирует обратно-рассеянный свет. Поскольку вибрации вдоль оптического волокна приводят к слабым изменениям показателя преломления оптического волокна, время поступления обратно-рассеянного сигнала может коррелировать с конкретным положением вдоль оптического волокна. Путем многократной эмиссии лазерных импульсов обеспечивают возможность получения другой информации, такой как фаза и/или частота сигнала. DAS-система имеет максимальную направленную чувствительность в поперечном направлении оптического волокна и минимальную направленную чувствительность в осевом направлении оптического волокна.
В одном или более вариантах волоконно-оптическая система 26 опроса может представлять собой детектор рамановского обратно-рассеянного излучения. Волоконно-оптическая система опроса согласно настоящему изобретению не ограничивается каким-либо конкретным типом и может быть выбрана на основе конкретной системы инклинометрии, вместе с которой она используется. Например, оптический волновод 16 может быть размещен в скважине 10 в дополнение к оптической дальномерной системе, описанной в настоящем документе, и волоконно-оптическая система 26 опроса может быть выбрана соответствующим образом. В этой связи, в одном или более вариантах вдоль оптического волокна могут быть размещены другие типы волоконно-оптических датчиков, включая, но без ограничения, температурные, химические и электромагнитные датчики.
Продолжим описание со ссылкой на фиг. 1 и 2, на которых показана вторая скважина 28. Буровая система 30 показана по существу в связи с этой второй скважиной. Буровая система 30 может включать буровую платформу 32, размещенную над формацией 12, и оборудование 34 устья скважины, включающее противовыбросовые превенторы 36. Платформа 32 может быть размещена для подъема и опускания передаточного механизма 48.
К концу передаточного механизма 48 прикреплен источник 50 звука или вибраций. В одном или более вариантах источник 50 звука может представлять собой часть компоновки 52 низа бурильной колонны (bottom-hole-assembly, BHA) буровой системы. В этой связи, источник 50 звука может представлять собой буровое долото или иной вибрационный или акустический генератор, поддерживаемый посредством BHA 52. В случае, если источник звука или вибраций представляет собой источник, отличный от бурового долота, в одном или более вариантах акустический сигнал может генерироваться на частоте, отличной от основной звуковой частоты, генерируемой буровым долотом. В одном или более вариантах, источник звука или вибраций находится в косвенном контакте с формацией, например на торце бурового долота, для максимизации мощности акустического или вибрационного сигнала, передаваемого в формацию. По причинам, которые будут очевидны, в этом случае акустический сигнал может передаваться или иным образом вводиться внутрь формации без приостановки буровых работ. Второй акустический сигнал выбирают таким образом, чтобы он не интерферировал с акустическим сигналом от бурового долота.
Согласно фиг. 1, буровая система 30 используется для активного бурения второй скважины 28, а передаточный механизм 48 может представлять собой насосно-компрессорную колонну или бурильную колонну, имеющую BHA 52, прикрепленную к концу колонны 48. BHA 52 включает буровое долото 54. BHA может также включать систему 56 питания, такую как гидравлический забойный двигатель, систему 58 регулирования направления бурения, систему 60 управления и другие датчики и инструменты 62. Для специалистов в данной области техники будет очевидно, что BHA 52, показанная на фиг. 1, может представлять собой систему измерения во время бурения или систему каротажа во время бурения, в которой пассивная дальнометрия может использоваться для того, чтобы направлять буровое долото 54 в то время, когда бурильная колонна размещена в скважине 28.
Как показано на фиг. 2, передаточная система 48 может представлять собой кабель, такой как провод, канат и т.п., используемый для опускания источника 50 звука в скважину 28. Подача питания и связь с источником 50 звука, при его наличии, может осуществляться локально с помощью надлежащих модулей 56-62 или через передаточную систему 48.
Акустическая дальномерная система 14 согласно настоящему описанию может быть развернута за земле или на море.
Кроме того, акустическая дальномерная система 14 не ограничивается какой-либо конкретной ориентацией первой и второй скважин. Как показано на фиг. 1, первая и вторая скважины 10, 28 соответственно являются по существу горизонтальными скважинами. В этом случае волоконно-оптическая дальномерная система 14 может быть особенно полезна при дальнометрии для операций SAGD. В качестве альтернативы, как показано на фиг. 2, первая и вторая скважины 10, 28 соответственно представляют собой по существу вертикальные скважины. Таким образом, волоконно-оптическая дальномерная система 14 может использоваться при бурении разгрузочных скважин или пересекающихся скважин, например в случае, когда желательно обеспечить непосредственную связь по флюиду между двумя скважинами. Это может быть особенно полезно, например, при внутрискважинных работах.
В любом из вариантов система 31 управления также может быть развернута для управления буровой системой 30 на основе результатов измерения, полученных с помощью системы 26 опроса.
Будучи развернутой, волоконно-оптическая дальномерная система 14 используется для акустических измерений и использует один или более оптических волноводов для обнаружения вибраций вдоль оптических волноводов, размещенных вдоль скважины 10. Волновод функционирует в качестве вытянутого непрерывного волоконно-оптического микрофона, гидрофона или акселерометра, в котором энергия вибраций преобразуется в динамическое механическое напряжение вдоль оптического волновода.
Такие механические напряжения внутри оптического волновода приводят к пропорциональным изменениям длины оптического тракта, которые могут быть измерены с помощью различных методик. Эти методики включают, но без ограничения, интерферометрию (например, на основе когерентного фазового рэлеевского рассеяния), поляриметрию, измерение сдвига длины волны на волоконной решетке Брэгга или измерение сдвига частоты при фотон-фонон-фотонном (бриллюэновском) рассеянии для световых волн, распространяющихся вдоль оптического световода.
Изменения длины оптического тракта приводят к похожему пропорциональному изменению оптической фазы или бриллюэновского сдвига частоты/фазы при определенном расстоянии-времени, и таким образом обеспечена возможность непрерывного обнаружения и мониторинга амплитуды и положения вибраций вдоль оптического волокна дистанционно с поверхности земли.
Измерение на основе когерентного фазового рэлеевского рассеяния может использоваться для осуществления распределенного вибрационного измерения (Distributed Vibration Sensing, DVS) или распределенного акустического измерения (Distributed Acoustic Sensing, DAS). Измерение на основе моделированного бриллюэновского рассеяния может использоваться для осуществления распределенного измерения механических напряжений (Distributed Strain Sensing, DSS) с целью определения сравнительно статических изменений механического напряжения вдоль оптического волокна, размещенного линейно вдоль скважины 10, однако в случае необходимости могут использоваться и другие методики (такие как измерение на основе когерентного фазового рэлеевского рассеяния).
Хотя оптический волновод изображен на фиг. 1 как установленный внутри обсадки 20 без использования дополнительных элементов, это является лишь одним из множества возможных путей установки оптического волновода 16 в скважине 10. Вместо указанного варианта оптический волновод 16 может быть расположен в боковой стенке обсадки 20, внутри трубы, которая расположена внутри или снаружи обсадки или насосно-компрессорной колонны внутри обсадки, или в цементе, или волновод может быть иным образом расположен в скважине.
ФИГ. 3а иллюстрирует аксиальный вид одиночного оптического волновода 16, размещенного вблизи или вплотную к скважине 10 и, в частности, вдоль внешней поверхности обсадного элемента 20, такого как изображенная на иллюстрациях обсадная секция. Оптический волновод 16 может включать защитную оболочку 70 или быть иным образом выполнен в виде оптоволоконного кабеля. В данном иллюстративном варианте оптический волновод 16 включает два оптических волокна 71а, 71b, хотя, как было пояснено выше, акустическая дальномерная система 14 не ограничивается количеством используемых в ней оптических волноводов или оптических волокон. Оптический волновод 16 может быть размещен или иным образом закреплен на обсадном элементе 20 или размещен в цементе 72, окружающем обсадку, с целью обеспечения акустической связи с формацией. Кроме того, в общих чертах изображен источник 50 звука внутри второй скважины 28. Линии 73 показывают распространение акустического сигнала от источника 50 звука внутрь формации 12. В одном или более вариантах оптический волновод 16 может быть размещен таким образом, чтобы он был вытянут вдоль по существу прямолинейного тракта вдоль части длины скважины 10, а в других вариантах оптический волновод 16 может быть закручен по спирали вокруг части длины скважины 10.
ФИГ. 3b иллюстрирует аксиальный вид двух оптических волноводов 16, размещенных вблизи или вплотную к скважине 10 и, в частности, вдоль внешней поверхности обсадного элемента 20, такого как изображенная на иллюстрации обсадная секция. Оптический волновод 16 может включать защитную оболочку 70 или быть иным образом выполнен в виде оптоволоконного кабеля. В данном иллюстративном варианте каждый из оптических волноводов 16 включает два оптических волокна 71а, 71b, хотя, как было пояснено выше, акустическая дальномерная система 14 не ограничивается количеством используемых в ней оптических волноводов или оптических волокон. Оптический волновод 16 может быть размещен или иным образом закреплен на обсадном элементе 20 или размещен в цементе 72, окружающем обсадку. Кроме того, в общих чертах изображен источник 50 звука внутри второй скважины 28. Линии 73 показывают распространение акустического сигнала от источника 50 звука внутрь формации 12. В одном или более вариантах оптический волновод 16 может быть размещен таким образом, чтобы он был вытянут вдоль по существу прямолинейного тракта в пределах части длины скважины 10, а в других вариантах оптический волновод 16 может быть закручен по спирали вокруг части длины скважины 10. В одном или более вариантах два оптических волновода 16 могут быть размещены вдоль одной и той же части длины скважины 10.
ФИГ. 3c иллюстрирует аксиальный вид одиночного оптического волновода 16, размещенного вблизи или вплотную к скважине 10 и, в частности, вдоль внутренней поверхности обсадного элемента 20, такого как изображенная на иллюстрации обсадная секция. Оптический волновод 16 может включать защитную оболочку 70 или быть иным образом выполнен в виде оптоволоконного кабеля. В данном иллюстративном варианте оптический волновод 16 включает два оптических волокна 71а, 71b, хотя, как было пояснено выше, акустическая дальномерная система 14 не ограничивается количеством используемых в ней оптических волноводов или оптических волокон. Оптический волновод 16 может быть размещен или иным образом закреплен на обсадном элементе 20 или размещен на другом трубчатом элементе, буровом снаряде и т.п. 69, размещенном внутри обсадного элемента 20. Будучи размещенным внутри обсадного элемента 20 или, в случае необсаженной скважины, будучи размещенным внутри скважины 10, оптический волновод 16 может находиться в физическом контакте с обсадным элементом 20 или формацией 12, в зависимости от конкретной ситуации, через рычаг, ребро, выступ или аналогичное физическое тело 74, которое может легко передавать вибрации внутри формации 12 на оптическое волокно 17 оптического волновода 16, обеспечивая таким образом акустическую связь с формацией 12. Кроме того, в общих чертах изображен источник 50 звука внутри второй скважины 28. Линии 73 показывают распространение акустического сигнала от источника 50 звука внутрь формации 12.
В одном или более вариантах, в качестве оптических волноводов 16 могут использоваться лишь одномодовые волноводы для обнаружения рэлеевского и/или бриллюэновского обратного рассеяния. Если используется обнаружение рамановского обратного рассеяния (например, для распределенного измерения температуры), то для этой цели может также использоваться многомодовый волновод (волноводы). Тем не менее следует понимать, что при желании многомодовые волноводы могут использоваться для обнаружения рэлеевского и/или бриллюэновского обратного рассеяния, и/или одномодовые волноводы могут использоваться для обнаружения рамановского обратного рассеяния, однако это может негативно повлиять на разрешающую способность.
В одном или более вариантах оптические волокна 71а, 71b могут представлять собой одномодовые оптические волокна. Эти одномодовые оптические волокна 71а, 71b могут быть оптически соединены с друг с другом на нижней поверхности волновода 16, например, с помощью обычного кольцевого волокна или миниатюрного изгиба. Эти элементы хорошо известны специалистам в данной области техники и поэтому не описаны более подробно.
В одном из примеров детектор бриллюэновского обратного рассеяния соединен с одномодовыми оптическими волокнами 71а, 71b для обнаружения бриллюэновского обратного рассеяния на основе света, передаваемого по этим волокнам. В другом варианте одно или более оптических волокон 71а, 71b или волноводов могут быть многомодовыми. Детектор рамановского обратного рассеяния соединен с многомодовым оптическим волноводом для обнаружения рамановского обратного рассеяния на основе света, передаваемого по этому оптическому волноводу.
Тем не менее следует понимать, что любые оптические детекторы и любые комбинации оптической детекторной аппаратуры могут быть соединены с оптическими волноводами 14 при соблюдении принципов настоящего изобретения. Например, могут использоваться детектор когерентного фазового рэлеевского обратного рассеяния, интерферометр или другие типы оптических инструментов.
В любом из вариантов, раскрытых со ссылками на фиг. 1-3, положение источника 50 относительно скважины 10 может быть определено методами обработки сейсмических данных, аналогичными тем, которые используются в микросейсмическом анализе на основе DAS (например, путем трассирования лучей с помощью априорной модели скорости звука). В одном из вариантов дальность измеряют на основе методик обработки сейсмических данных, таких как трассирование лучей. В одном или более вариантах алгоритм трассирования лучей, основанный на законах, управляющих отражением и разделением упругих и/или неупругих сейсмических волн при их распространении, может быть использован для определения направления и расстояния распространения волновых полей через скоростную модель от источников (т.е. событий, происходящих в BHA) до распределенных акустических датчиков. Этот алгоритм может быть итерационным.
В одном или более вариантах миграционный алгоритм, основанный на законах, управляющих сопряженными операторами распространения упругих и/или неупругих сейсмических волн, может быть использован для определения направления и расстояния распространения волновых полей от источников (т.е. событий, происходящих в BHA) до распределенных акустических датчиков. Этот миграционный алгоритм также может быть итерационным.
В других вариантах инверсионный алгоритм, основанный на законах, управляющих распространением упругих и/или неупругих акустических волн, может быть использован для определения направления и расстояния распространения волновых полей, распространяющихся от источников (т.е. событий, происходящих в BHA) до распределенных акустических датчиков. Этот инверсионный алгоритм может быть основан на стохастических и/или детерминистических способах оптимизации.
В других вариантах используемых алгоритмов обработки имеет место скоростная модель геологических формаций. Эта скоростная модель может быть построена априори на основе сейсмических данных (включая, но без ограничения, двумерные/трехмерные/четырехмерные сейсмические данные, результаты вертикального сейсмического профилирования (VSP) и/или результаты сейсмической интерферометрии) и/или данных акустического каротажа (включая, но без ограничения, результаты каротажа во время бурения (LWD) и/или каротажа на кабеле), и может генерироваться с использованием вычислительных алгоритмов для построения точных моделей, таких как обвязка скважины и геостатистика. Скоростная модель может содержать скорости распространения продольных волн и/или поперечных волн, которые могут быть анизотропными. В одном или более вариантах используемых алгоритмов обработки может также быть применена модель плотности для алгоритмов обработки данных, основанных на акустическом импедансе.
В одном или более вариантах множество оптических волноводов может быть развернуто под различными азимутами вокруг обсадки скважины с целью получения дифференциальных (или градиентных) результатов акустических измерений для улучшения азимутальной чувствительности в отношении обсадки скважины. В одном из таких вариантов, показанном на фиг. 3b, два оптических волокна размещены в противолежащих по азимуту положениях относительно скважины 10 и могут использоваться для определения поперечного смещения "L" BHA относительно скважины 10. В таких вариантах направление и расстояние между BHA и первой скважиной могут быть определены на основе разностей моментов поступления акустических сигналов в различные оптические волноводы, размещенные вокруг скважины.
В одном или более вариантах одиночное оптическое волокно может быть развернуто вокруг обсадки скважины в виде спирали через регулярные или нерегулярные интервалы для улучшения азимутальной чувствительности в отношении обсадки скважины. В таких вариантах направление и расстояние между BHA и первой скважиной может быть определено на основе вариантов методик обработки, описанных выше.
Фиг. 4 показывает блок-схему, иллюстрирующую варианты способа 400 акустической дальнометрии согласно настоящему изобретению. Без ограничения объема настоящего изобретения, в одном из вариантов способ 400 акустической дальнометрии может быть применен для операций SAGD или для бурения пересекающихся скважин, например для внутрискважинных работ. В любом из вариантов, на первом шаге 410 размещают DAS-систему в первой скважине таким образом, чтобы акустический волновод был акустически связан с формацией, в которой пробуривается первая скважина. DAS-система может быть такой же, как и описанная выше в отношении акустической дальномерной системы 14. Таким образом, первая скважина пробурена и обсадка зацементирована прямо на месте внутри первой скважины. Оптический волновод размещен в цементе, окружающем обсадку. В случае использования двух оптических волноводов, в одном или более вариантах эти волноводы могут быть размещены с противоположных сторон обсадки в положениях, разнесенных приблизительно на 180 градусов. В качестве альтернативы, один оптический волновод может быть размещен таким образом, чтобы он был вытянут вдоль по существу прямолинейного тракта вдоль части длины первой скважины, а второй оптический волновод может быть закручен по спирали вокруг части длины первой скважины. В одном или более вариантах два оптических волновода могут быть размещены вдоль одной и той же части длины первой скважины. В некоторых вариантах способ может быть осуществлен в необсаженных скважинах, и в этом случае DAS-система может быть размещена без размещения обсадки и без цементирования.
На шаге 420 начинают бурение второй скважины. В это время акустический сигнал поступает от второй скважины в формацию, окружающую первую скважину. В одном или более вариантах акустический сигнал генерируется в результате самого бурения и, конкретно, в результате взаимодействия бурового долота с формацией. В других вариантах акустический сигнал может генерироваться другим источником во второй скважине, таким как генератор акустического сигнала, расположенный вблизи или вплотную к буровому долоту. В этой связи, акустический сигнал от источника может быть выбран таким образом, чтобы он отличался от акустического сигнала, генерируемого в результате бурения.
На шаге 430 с помощью DAS-системы измеряют в первой скважине акустический сигнал, поступающий от второй скважины. Например, источник света излучает свет по первому оптическому волноводу в первой скважине. Возвратный свет или его часть обнаруживают и используют для определения акустического сигнала, взаимодействующего с первой скважиной в конкретном месте вдоль первой скважины. В одном или более вариантах акустический сигнал может быть измерен с помощью рамановского обратного рассеяния для обнаружения и регистрации обратно-рассеянного света. В одном или более вариантах акустический сигнал может быть измерен с помощью рамановского обратного рассеяния для обнаружения и регистрации обратно-рассеянного света.
На шаге 440 с помощью измеренного акустического сигнала определяют дальность и, в частности, направление и расстояние между источником звука и первой скважиной. В одном из вариантов дальность измеряют на основе методик обработки сейсмических данных, таких как трассирование лучей. В одном или более вариантах алгоритм трассирования лучей, основанный на законах, управляющих отражением и разделением упругих и/или неупругих сейсмических волн при их распространении, может быть использован для определения направления и расстояния распространения волновых полей через скоростную модель от источников (т.е. событий, происходящих в BHA) до распределенных акустических датчиков. Этот алгоритм может быть итерационным.
В одном или более вариантах миграционный алгоритм, основанный на законах, управляющих сопряженными операторами распространения упругих и/или неупругих сейсмических волн, может быть использован для определения направления и расстояния распространения волновых полей от источников (т.е. событий, происходящих в BHA) до распределенных акустических датчиков. Этот миграционный алгоритм также может быть итерационным.
В других вариантах инверсионный алгоритм, основанный на законах, управляющих распространением упругих и/или неупругих акустических волн, может быть использован для определения направления и расстояния распространения волновых полей от источников (т.е. событий, происходящих в BHA) до распределенных акустических датчиков. Этот инверсионный алгоритм может быть основан на стохастических и/или детерминистических способах оптимизации.
В других вариантах используемых алгоритмов обработки имеет место скоростная модель геологических формаций. Эта скоростная модель может быть построена априори на основе сейсмических данных (включая, но без ограничения, двумерные/трехмерные/четырехмерные сейсмические данные, результаты вертикального сейсмического профилирования (VSP) и/или результаты сейсмической интерферометрии) и/или данных акустического каротажа (включая, но без ограничения, результаты каротажа во время бурения (LWD) и/или каротажа на кабеле), и может генерироваться с использованием вычислительных алгоритмов для точных модельных конструкций, таких как обвязка скважины, и геостатистики. Скоростная модель может содержать скорости распространения продольных волн и/или поперечных волн, которые могут быть анизотропными. В одном или более вариантах используемых алгоритмов обработки может также быть применена модель плотности для алгоритмов обработки данных, основанных на акустическом импедансе.
В случае, когда два оптических волновода размещены вдоль одной и той же части длины первой скважины, для определения направления может быть произведена обработка разностей акустических сигналов между этими двумя оптическим волноводами. Например, указанные разности могут представлять собой разности между акустическим сигналом в первом оптическом волноводе, размещенном таким образом, чтобы он был вытянут вдоль по существу прямолинейного тракта вдоль части длины скважины, и во втором оптическом волноводе, спирально закрученном вокруг части длины скважины.
На шаге 450 измеренные направление и расстояние могут быть использованы для определения наличия любых отклонений от желаемой траектории второй скважины. В этой связи, бурение второй скважины инициируют в соответствии с предварительно заданным планом бурения таким образом, чтобы бурение второй скважины осуществлялось по заданной траектории относительно первой скважины. Например, бурение второй скважины может осуществляться таким образом, чтобы часть второй скважины была параллельна части первой скважины и располагалась от нее на расстоянии приблизительно 5-10 метров, как и в случае выполнения операций SAGD. Если обнаружены отклонения между фактической траекторией и желаемой траекторией второй скважины, то корректируют траекторию второй скважины. В этой связи, инструмент направленного бурения может быть использован для изменения положения бурового долота таким образом, чтобы скорректировать траекторию второй скважины.
После того, как траектория второй скважины была скорректирована, на шаге 460 продолжают бурение второй скважины. Следует понимать, что коррекции траектории второй скважины могут осуществляться в процессе или во время приостановки бурения.
Кроме того, описанная акустическая дальномерная система согласно настоящему описанию может быть использована в виде замкнутой кольцевой системы. Таким образом, как показано на фиг. 4, в процессе продолжения бурения на шаге 460, акустическая дальнометрия и коррекция могут повторяться для непрерывного обеспечения точности траектории второй скважины.
В одном или более вариантах DAS-система в первой скважине может быть использована, во время бурения второй скважины или во время добычи после бурения, с другими волоконно-оптическими датчиками, включая, но без ограничения, температурные, химические и/или электромагнитные волоконно-оптические датчики, для осуществления связанных с ними соответствующих измерений.
Следует иметь в виду, что волоконно-оптическая дальномерная система 14 согласно настоящему описанию представляет собой пассивную систему и не требует передачи тока вдоль целевой скважины, поэтому обсадной элемент 20 не обязательно должен быть электропроводным. Таким образом, обсадной элемент 20 может, по желанию, включать одно или более непроводящих соединений.
Во всех вариантах DAS-системы ее чувствительность (например, передаточная функция) может быть оценена с помощью по меньшей мере одного известного сейсмического/акустического/звукового источника, размещенного с поверхности, изнутри известной скважины или изнутри другой скважины. Эта оценка может включать, например, положение/ориентацию оптического волокна вдоль целевой скважины.
Акустическая дальномерная система согласно настоящему описанию является желательной, поскольку она представляет собой пассивную систему, так что расстояние, направление и угол BHA относительно целевой скважины могут быть определены на основе акустических сигналов, генерируемых BHA во время бурения и измеряемых DAS-системой. В качестве пассивной дальномерной методики, методика с использованием BHA не требует никаких активных акустических и/или электромагнитных источников и/или датчиков для каротажа во время бурения (LWD), а целевая скважина не требует электропроводного корпуса или источника тока для проведения дальномерных операций. Кроме того, DAS-система может быть размещена вместе с другими волоконно-оптическим системами, такими как распределенные термометрические (DTS) системы, поскольку они необходимы в нефтедобыче по технологии SAGD. В дополнение, система и способы акустической дальнометрии могут работать в реальном времени. После завершения бурения второй скважины возможно продолжение использования DAS-системы в других сферах акустического мониторинга при нефтедобыче по технологии SAGD (например, для микросейсмического мониторинга, для мониторинга многофазного потока и т.д.).
Таким образом, была описана дальномерная система. Варианты скважинной дальномерной системы обычно могут включать оптический волновод, размещенный в первой скважине формации; и источник звука, размещенный во второй скважине и акустически связанный с формацией. В других вариантах была описана акустическая дальномерная система для скважин, обычно включающая первую скважину с размещенной в ней волоконно-оптической дальномерной системой; и источник звука, размещенный для генерирования акустического сигнала. В любом из вышеизложенных вариантов система может включать любые из следующих элементов, по отдельности или в комбинации друг с другом:
Оптический волновод представляет собой оптоволоконный кабель.
Оптический волновод размещен вдоль осевой длины первой скважины.
Второй оптоволоконный кабель размещен вдоль того же самого осевой длины первой скважины, вдоль которого размещен первый оптоволоконный кабель.
Оптический волновод закручен по спирали вокруг первой скважины вдоль осевой длины первой скважины.
Первая скважина имеет первую осевую длину, а вторая скважина имеет вторую осевую длину и дальний конец, и акустический источник во второй камере размещен вблизи этого дальнего конца.
Оптоволоконный кабель представляет собой распределенный акустический датчик.
Распределенный акустический датчик представляет собой распределенный вибрационный датчик.
Оптический волновод размещен вдоль части длины первой скважины.
В состоянии оптической связи с оптическим волноводом размещена оптическая система опроса.
Оптическая система опроса содержит оптический детектор рэлеевского обратного рассеяния.
Оптическая система опроса содержит оптический детектор бриллюэновского обратного рассеяния.
Множество оптических волноводов проходит вдоль по меньшей мере части длины первой скважины.
Множество оптических волноводов расположено через промежутки вокруг периметра первой скважины.
Два оптических волновода разнесены на 180 градусов вокруг периметра первой скважины.
Оптический волновод представляет собой одномодовый оптический волновод.
Оптический волновод представляет собой многомодовый оптический волновод.
Оптический волновод представляет собой оптическое волокно.
Оптический волновод представляет собой оптическую ленту.
По меньшей мере часть оптического волновода размещена по спирали вокруг первой скважины.
В первой скважине размещена обсадка, имеющая внешнюю поверхность, при этом оптический волновод размещен вблизи или вплотную к внешней поверхности обсадки.
Оптический волновод зацементирован прямо на месте вблизи или вплотную к обсадке.
Оптический волновод размещен внутри скважины таким образом, чтобы был сформирован тракт акустической передачи между оптическим волноводом и формацией.
Оптический волновод стационарно установлен в первой скважине.
Оптический волновод временно установлен в первой скважине.
Оптический волновод размещен на трубной колонне, установленной внутри первой скважины.
Оптический волновод размещен на насосно-компрессорной колонне, установленной внутри первой скважины.
Внутри первой скважины между оптическим волноводом и формацией размещен звукопроводящий элемент.
Система опроса оптического волновода имеет оптическую связь с оптическим волноводом, система управления имеет связь с системой опроса оптического волновода, а буровая система имеет связь с системой управления и дополнительно содержит буровое долото, размещенное во второй скважине.
Первая скважина содержит непроводящую обсадку, расположенную вдоль по меньшей мере части длины первой скважины.
Источник звука представляет собой буровое долото.
Буровое долото размещено на конце бурильной колонны в качестве части компоновки низа бурильной колонны.
Компоновка низа бурильной колонны содержит источник звука.
Компоновка низа бурильной колонны содержит систему направленного бурения и систему питания.
Источник звука размещен на конце кабеля.
Оптический волновод размещен в части первой скважины, которая является по существу горизонтальной, а источник звука размещен в части второй скважины, которая является по существу горизонтальной.
Оптический волновод размещен в части первой скважины, которая является по существу вертикальной, а источник звука размещен в части второй скважины, которая является по существу вертикальной.
Был описан способ скважинной дальнометрии. Варианты способа скважинной дальнометрии могут включать шаги, на которых размещают распределенную акустическую измерительную систему в первой скважине; используют источник звука снаружи первой скважины для генерирования акустического сигнала; обнаруживают акустический с помощью распределенной акустической измерительной системы; и определяют положение первой скважины в формации на основе обнаруженного акустического сигнала. В вышеизложенных вариантах способ может включать один или более следующих шагов, по отдельности или в комбинации друг с другом, на которых:
Размещают источник звука во второй скважине внутри формации.
Размещают оптический волновод вдоль по меньшей мере части длины первой скважины.
Акустически связывают размещенный оптический волновод с формацией.
Цементируют оптический волновод прямо на месте в первой скважине.
Определяют направление первой скважины.
Размещают оптический волновод вблизи или вплотную к внешней поверхности трубной обсадки в первой скважине.
Размещают второй оптический волновод вдоль по меньшей мере части длины первой скважины таким образом, чтобы он располагался на расстоянии от первого оптического волновода.
Обнаруживают вибрации вдоль оптического волновода.
Преобразуют вибрации от источника звука в динамическое механическое напряжение вдоль оптического волновода.
Пробуривают вторую скважину и размещают источник звука на бурильной колонне, используемой для бурения второй скважины.
Используют буровое долото, размещенное посредством бурильной колонны, для генерирования акустического сигнала.
Обеспечивают распространение оптического сигнала по оптическому волноводу и измеряют возвратный сигнал.
Используют источник света для распространения света по оптическому волноводу.
Формируют акустический передающий тракт между оптическим волноводом и формацией.
Измеряют бриллюэновское обратное рассеяние.
Измеряют рамановское обратное рассеяние.
Измеряют рэлеевское обратное рассеяние.
Используют трассирование лучей для определения положения первой скважины.
Используют измеренное магнитное поле и обнаруженный акустический сигнал для определения расстояния между первой и второй скважинами.
Используют обнаруженный акустический сигнал в первой скважине для определения распределения электрического тока вдоль электропроводного элемента в первой скважине.
Используют обнаруженный акустический сигнал в первой скважине для определения величины электрического тока в определенной точке вдоль электропроводного элемента в первой скважине.
Определяют направление и расстояние между первой скважиной и второй скважиной, в которой размещен источник звука.
Определяют желаемую траекторию второй скважины относительно первой скважины на основе плана бурения и корректируют фактическую траекторию второй скважины на основе обнаруженного положения первой скважины.
Желаемая траектория второй скважины относительно первой скважины должна быть по существу параллельна по меньшей мере на части длин этих двух скважин.
По существу параллельные части двух скважины являются по существу горизонтальными.
Желаемая траектория второй скважины относительно первой скважины должна обеспечить пересечение второй скважины с первой скважиной.
Корректируют траекторию второй скважины на основе разности между желаемой траекторией и фактической траекторией.
Изменяют положение бурового долота во второй скважине для корректировки траектории второй скважины.
Начинают бурение второй скважины до шага, на котором определяют положение второй скважины, и продолжают бурение после изменения положения бурового долота.
Многократно повторяют по время бурения второй скважины вышеуказанные шаги использования, обнаружения и определения.
Непрерывно повторяют по время бурения второй скважины вышеуказанные шаги использования, обнаружения и определения.
Измеряют характеристику первой скважины с использованием распределенной измерительной системы, при этом выбирают характеристику из группы, содержащей температуру, давление и вибрацию.
Наматывают по спирали оптический волновод вдоль части обсадки первой скважины.
Определяют направление первой скважины путем сравнения между между первым оптическим волноводом, размещенном вдоль части длины первой скважины, и вторым оптическим волноводом, размещенном вдоль по меньшей мере той же самой части длины первой скважины.
Шаг, на котором осуществляют сравнение для определения направления первой скважины, включает обработку разностей акустических сигналов двух оптических волноводов на той части длины скважины, вдоль которой они размещены.
Используют способ на операциях SAGD.
Используют способ на операциях пересечения скважин.
Хотя настоящее изобретение было раскрыто выше в отношении конкретных вариантов, специалистам в данной области техники будут очевидны различные модификации. Предполагается, что все изменения в пределах объема и сущности изобретения, указанных в приложенной формуле изобретения, будут включены в раскрытое выше описание изобретения.
Реферат
Изобретение относится к бурению скважин и может быть использовано для контроля расположения пробуриваемой скважины относительно целевой скважины. В частности, предложена скважинная дальномерная система, содержащая: первый оптический волновод, размещенный в первой скважине формации, причем первый оптический волновод расположен вдоль части осевой длины первой скважины; по меньшей мере второй оптический волновод, расположенный вдоль по меньшей мере той же самой осевой длины первой скважины, что и первый оптический волновод; и источник звука, размещенный во второй скважине и акустически связанный с указанной формацией. Причем оптические волноводы размещены под различными противолежащими азимутальными положениями вокруг первой скважины для определения поперечного смещения источника звука от первой скважины. Предложенное изобретение направлено на обеспечение эффективной «пассивной» дальнометрии без необходимости использования наведения тока в целевую скважину. 3 н. и 20 з.п. ф-лы, 6 ил.
Формула
Документы, цитированные в отчёте о поиске
Система и способ измерения параметров в стволе скважины
Комментарии