Устройство измерения расстояния и определения направления между двумя буровыми скважинами (варианты), способ измерения расстояния и определения направления между двумя буровыми скважинами, узел соленоида устройства измерения расстояния и определения напра - RU2468200C2
Код документа: RU2468200C2
Чертежи







Описание
Область техники, к которой относится изобретение
Настоящее изобретение относится к геофизике и бурильной технике, а именно к способам и устройствам слежения за процессом бурения скважин на значительную глубину в поверхности земли, в частности к способам определения местоположения реперной скважины относительно буровой скважины в процессе бурения.
Уровень техники
Настоящая заявка основывается на притязаниях по предварительной заявке на патент США №60/810,696, поданной 5-го июня 2006 года, и предварительной заявке на патент США №60/814,909, поданной 20-го июня 2006 года, содержание которых включено в настоящую заявку при помощи ссылок.
Трудности, возникающие при слежении и управлении бурением скважин с предполагаемым пересечением ствола реперной скважины на значительной глубине от поверхности земли или без такового пересечения, либо в случае бурения скважины с точно заданной траекторией ствола, хорошо известны. Например, подобное управление процессом бурения может потребоваться при создании проложенной под землей "трубопроводной системы" для добычи сырья из залежей газа, нефти или битума. В течение нескольких последних лет был разработан и очень успешно реализован ряд различных электромагнитных способов слежения и управления бурением таких скважин. Указанные способы и приборы, нашедшие свое применение, описываются, например, в патентах США №4,323,848 и №4,372,398, на имя одного и того же указанного в них заявителя, а также в патенте США №4,072,200 на имя Морриса с соавторами и, наконец, в патенте Канады №1,269,710, выданном 29-го мая 1990 года на имя Барнетта с соавторами.
Несмотря на то, что процесс управления бурением скважин относительно уже существующих буровых скважин в общем хорошо отработан, могут возникать особые трудности там, где существующие методики не обеспечивают в достаточной мере требуемой в конкретной ситуации точности управления. Например, с трудностями можно столкнуться, когда требуется определить координаты ствола конкретной целевой скважины, расположенной среди большой группы других скважин на месторождении, либо производить бурение скважин в обход ствола указанной скважины или, наоборот, с пересечением такового. Данная ситуация наблюдается, когда множество скважин расходится из устьев, расположенных на одном буровом участке, таком как буровая платформа, и когда становится необходимым бурение новой скважины в обход соседних скважин либо, в качестве альтернативного решения, бурение новой скважины специально с целью пересечения ствола конкретной скважины. В указанном случае все скважины начинаются в одном месте и далее расходятся друг от друга вниз и в наружном направлении. Поскольку начало новой скважины при бурении может совпадать с общим местоположением устьев других скважин либо скважина может иметь начало на расстоянии в несколько сотен метров от устья целевой скважины, и если ставится задача вести проходку новой скважины с пересечением либо в обход ствола другой скважины, то трудности с распознаванием скважин могут быть удручающими.
Трудности при слежении и управлении бурением скважин также возникают в связи с бурением непараллельных скважин, таких как горизонтальные скважины, проходящие через сеть вертикальных скважин, либо наоборот, то есть когда ставится задача вести проходку новой скважины в обход существующих скважин либо, в качестве альтернативного решения, когда ставится задача пересечения ствола конкретной скважины. Другой областью возникновения трудностей является бурение группы горизонтальных скважин, в частности, когда скважину требуется бурить в основном параллельно существующей скважине. В ряде случаев возникает необходимость в бурении двух или более горизонтальных скважин в непосредственной близости друг от друга, но, однако, с точно выдержанным межскважинным расстоянием. К таким случаям, например, в нефтяной промышленности относится нефтедобыча с обработкой скважин паром, когда в одну из горизонтальных скважин нагнетается пар, а из другой скважины производят добычу способной к перемещению вязкой нефти. Описание указанного способа имеется, к примеру, в патенте Канады №1, 304, 287, выданном 30-го июня 1992 года на имя Эдмундса с соавторами. Другим примером является место захоронения токсичных отходов, где необходимы параллельные горизонтальные скважины для нагнетания по одним из них воздуха с вытеснением токсичных жидких отходов по другим скважинам на утилизацию. Еще одним примером является система, построенная на использовании геотермальной энергии нагретой породы, в которой предусмотрено бурение параллельных скважин, по одним из которых к нагретой породе подается холодная вода, а по другим извлекается уже горячая вода. Далее, можно привести пример бурения скважин для нужд трубопроводного транспорта, когда ставится задача стыковки буровых скважин под землей, что требует точного выведения скважин в заданную точку, к примеру, если проходка скважин ведется от противоположных берегов реки.
Бурение горизонтальных, параллельных скважин считается наиболее важной задачей при разжижении тяжелых нефтяных песчаников, когда скважину необходимо бурить вблизи и параллельно стволу существующей скважины на расстоянии порядка 5 метров от нее и протяженностью порядка 100 метров или более на глубине, например 500 метров или глубже. Бурение ряда таких скважин может проводиться в относительной близости друг от друга по горизонту продуктивного нефтяного пласта, и бурение данных скважин должно производиться экономически выгодным способом без ввода в работу дополнительного оборудования и привлечения дополнительного обслуживающего персонала.
Цель настоящего изобретения - в значительной степени преодолеть вышеуказанные недостатки известных устройств и способов бурения и обеспечить высокоточный процесс управления бурения скважин.
Раскрытие изобретения
Для достижения указанного технического результата разработано устройство измерения расстояния и определения направления между двумя буровыми скважинами, проходящими в геологической среде. Оно содержит узел соленоида, установленный в первой выбранной точке в первой буровой скважине, при этом первая буровая скважина имеет известный угол отклонения от вертикали и известное направление в первой выбранной точке, скважинную электрическую схему для подачи электрического тока в узел соленоида, который формирует характеристическое магнитное поле заданной величины соленоида, действующее в течение короткого промежутка времени, устройство для дистанционной подачи пускового сигнала на узел соленоида, электронную схему в узле соленоида, выполненную с возможностью работы в режиме активного ожидания указанного пускового сигнала таким образом, что при получении пускового сигнала она начинает пропускать по соленоиду электрический ток заданной величины, датчик магнитного поля, расположенный во второй выбранной точке во второй скважине, при этом датчик магнитного поля выполнен с возможностью измерения трех векторных составляющих характеристического магнитного поля соленоида во второй точке, электронную схему определения пространственных координат датчика магнитного поля во второй точке второй буровой скважины, процессор определения расстояния и направления между первой и второй точками по измеренным пространственным координатам датчика и измеренным векторным составляющим магнитного поля во второй точке второй буровой скважины и затем по заданной величине характеристического магнитного поля соленоида. Устройство может содержать трубную муфту, при этом узел соленоида содержит маяк с источником магнитного поля, выполненный с обмоткой, навитой на трубную муфту.
Для достижения указанного технического результата разработано также устройство измерения расстояния и определения направления между двумя буровыми скважинами, проходящими в геологической среде, которое содержит узел соленоида, установленный в первой выбранной точке в первой буровой скважине, причем первая буровая скважина имеет известный угол отклонения от вертикали и известное направление в первой выбранной точке, устройство дистанционной подачи пускового сигнала на узел соленоида, скважинную электронную схему подачи электрического тока в узел соленоида, выполненную с возможностью работы в режиме активного ожидания указанного пускового сигнала таким образом, что при получении пускового сигнала она начинает пропускать по соленоиду электрический ток заданной величины, датчик магнитного поля, расположенный во второй выбранной точке во второй скважине, при этом датчик магнитного поля выполнен с возможностью измерения трех векторных составляющих указанного характеристического магнитного поля соленоида в второй точке, электронную схему определения пространственных координат датчика магнитного поля в второй точке второй буровой скважины, процессор определения расстояния и направления между первой и второй точками по измеренным пространственным координатам указанного датчика и измеренным векторным составляющим магнитного поля во второй точке второй буровой скважины и затем по заданной величине характеристического магнитного поля соленоида. В устройстве может содержаться трубная муфта, при этом трубная муфта имеет первый и второй концы с резьбой для резьбового соединения отрезков труб. Устройство может содержать отрезки труб, соединенных встык с образованием обсадной трубы скважины. Устройство может содержать отрезки труб, соединенных встык с образованием спусковой колонны для временной установки в буровой скважине. Устройство может содержать узел соленоида, содержащий группу маяков с источником магнитного поля, причем каждый маяк содержит обмотку, навитую на трубную муфту, а каждая трубная муфта имеет первый и второй концы с резьбой для резьбового соединения соответствующих отрезков труб.
Соединенные отрезки труб могут образовать обсадную трубу скважины с разнесенными по ее длине маяками. Соединенные отрезки труб могут образовать спусковую колонну с разнесенными по ее длине маяками.
Скважинная электрическая схема подачи электрического тока в узел соленоида может содержать средство телеметрической связи, которое устанавливается на трубной муфте и подключается с возможностью селективной подачи электрического тока в обмотку соленоида с образованием соленоидом характеристического магнитного поля заданной величины. Устройство для дистанционной подачи пускового сигнала может содержать средство подачи телеметрических сигналов во второй буровой скважине. Средство подачи телеметрических сигналов может быть выполнено с возможностью подачи кодированных акустических пусковых сигналов. Средство подачи телеметрических сигналов может содержать расположенный на поверхности земли первый преобразователь давления, который создает импульсы давления во второй буровой скважине, и средство каротажа в процессе бурения в второй буровой скважине, содержащее второй преобразователь давления, вырабатывающий кодированные акустические пусковые сигналы в ответ на указанные импульсы давления. Средство каротажа в процессе бурения содержит датчик магнитного поля и электронную схему определения пространственных координат указанного датчика магнитного поля. Устройство дистанционной подачи пускового сигнала содержит средство подачи телеметрических сигналов в указанной первой буровой скважине.
Средство подачи телеметрических сигналов может содержать передатчик ударного действия. Средство подачи телеметрических сигналов может содержать источник электрического тока. Средство подачи телеметрических сигналов может дополнительно содержать изолированный провод, подключенный к источнику электрического тока и проходящий по первой буровой скважине, при этом средство телеметрической связи установлено на трубной муфте и содержит измерительный преобразователь, чувствительный к электрическому току.
Трубная муфта с электромагнитным маяком может соединять соседние отрезки труб с образованием спусковой колонны для временной установки в первой буровой скважине, при этом источник электрического тока подключен к спусковой колонне с возможностью создания в ней кодированного пускового сигнала, при этом средство телеметрической связи, установленное на трубной муфте, содержит измерительный преобразователь, чувствительный к указанному кодированному пусковому сигналу в спусковой колонне. Измерительный преобразователь может содержать измерительную катушку, которая тороидально навита на трубную муфту и подключена к средству телеметрической связи. Характеристическое магнитное поле соленоида может является переменным магнитным полем или постоянным. Устройство для дистанционной подачи пускового сигнала может содержать средство подачи магнитных или акустических пусковых сигналов во второй скважине, при этом узел соленоида содержит группу электромагнитных маяков, разнесенных по длине первой буровой скважины, при этом указанные электромагнитные маяки избирательно приводят в действие кодированными пусковыми сигналами с образованием соответствующих характеристических магнитных полей. Устройство для дистанционной подачи пускового сигнала может содержать средство подачи кодированных пусковых сигналов давления или кодированных электрических пусковых сигналов в первой буровой скважине, при этом узел соленоида содержит группу электромагнитных маяков, разнесенных по длине указанной первой буровой скважины, при этом электромагнитные маяки содержат приемные преобразователи, реагирующие на кодированные пусковые сигналы давления или кодированные электрические пусковые сигналы с образованием соответствующих характеристических магнитных полей. Электропитание указанных маяков может осуществляется от батарей, установленных в узле соленоида. В устройстве может дополнительно содержаться расположенный на поверхности земли удаленный источник переменного или постоянного тока для электропитания маяков, а также дополнительно содержатся питающие провода, проходящие от указанного источника тока по первой скважине с подключением к маякам.
Для достижения указанного технического результата разработано также устройство измерения расстояния и определения направления между двумя буровыми скважинами, проходящими в геологической среде, включающее в себя узел соленоида, установленный в первой буровой скважине, имеющей известный угол отклонения от вертикали и известное направление в первой выбранной точке, датчик магнитного поля, расположенный во второй выбранной точке второй скважины и выполненный с возможностью измерения трех векторных составляющих характеристического магнитного поля соленоида, электронную схему определения пространственных координат датчика магнитного поля во второй точке второй буровой скважины. При этом оно дополнительно содержит скважинную электронную схему для подачи электрического тока пускового сигнала для получения пускового сигнала и начала пропускания электрического тока заданной величины и процессор получения пространственных координат датчика и измеренных векторных составляющих для определения расстояния и направления между первой и второй точками. Устройство может включать удаленный компьютер, сохраняющий постоянными расстояние и направление, при этом в первой буровой скважине на расстоянии друг от друга расположена группа узлов соленоида, указанный процессор для определения расстояния и направления расположен между группой пар точек двух буровых скважин. Устройство может включать удаленный компьютер для получения определяемых расстояния и направления и сохранения постоянной параллельности между двумя буровыми скважинами.
Для достижения заявленного технического результата разработан способ измерения расстояния и определения направления между двумя буровыми скважинами, проходящими в геологической среде, при котором устанавливают узел соленоида в первой выбранной точке в первой буровой скважине, причем первая буровая скважина имеет известный угол отклонения от вертикали и известное направление в указанной выбранной точке, размещают датчик магнитного поля во второй выбранной точке во второй скважине, измеряют указанным датчиком векторные составляющие магнитного поля и силы тяжести в указанной второй точке во второй буровой скважине, определяют пространственные координаты указанного датчика магнитного поля во второй точке второй буровой скважины, оснащают узел соленоида электронной схемой, выполненной с возможностью работы в режиме активного ожидания указанного пускового сигнала таким образом, что при получении пускового сигнала она начинает пропускать по соленоиду электрический ток заданной величины с образованием характеристического магнитного поля соленоида заданной величины, действующего в течение короткого промежутка времени, дистанционно подают пусковой сигнал на узел соленоида с образованием узлом соленоида характеристического магнитного поля, обнаруживают характеристическое магнитное поле при помощи датчика магнитного поля во второй точке во второй буровой скважине, определяют расстояние и направление между первой и второй точками по пространственным координатам датчика магнитного поля и по измеренным векторным составляющим во второй точке во второй буровой скважине и, дополнительно, по вышеуказанному характеристическому магнитному полю заданной величины. Также в способе могут определять расстояние между группами пар точек указанных первой и второй буровых скважин и поддерживать постоянными расстояние и направление указанных групп пар точек. Также в способе могут передавать определенные расстояние и направление для сохранения постоянной параллельности между двумя буровыми скважинами.
Для достижения заявленного технического результата разработан также узел соленоида устройства измерения расстояния и определения направления между двумя буровыми скважинами. Он содержит трубную муфту, которая имеет первый и второй концы для соединения соответствующих отрезков труб, катушку, навитую вокруг трубной муфты, средство телеметрической связи, установленное на трубной муфте и подключенное к катушке, при этом средство телеметрической связи оснащено измерительным преобразователем, чувствительным к указанным пусковым сигналам, который выполнен с возможностью включения указанной катушки с соответствующим образованием ее характеристического магнитного поля. Измерительный преобразователь может содержать тороидальную измерительную катушку. Узел соленоида может дополнительно содержать группу муфт для соединения встык соответствующих отрезков труб с образованием удлиненной обсадной трубы или спусковой колонны, содержащих пространственно разнесенные муфты, для введения в буровую скважину. Измерительный преобразователь может содержать датчик, чувствительный к дистанционно передаваемым акустическим, магнитным, электрическим пусковым сигналам.
Более детально прокомментируем предлагаемое изобретение и разъясним значимость и логику введенных конструктивных особенностей устройства и способа. Трудности, которыми сопровождается процесс прецизионного, управляемого бурения двух и более скважин в непосредственной близости друг от друга, являются преодолимыми в соответствии с настоящим изобретением при помощи устройства для измерения расстояния и определения направления между двумя скважинами, содержащего узел соленоида, установленный в первой выбранной точке в первой скважине, причем первая буровая скважина имеет известный угол отклонения от вертикали и известное направление в указанной выбранной точке. В состав электромагнитного узла входят электронные схемы, находящиеся в состоянии активного ожидания пускового сигнала, и по получении указанного пускового сигнала ими в обмотку соленоида начинает подаваться электрический ток заданной величины с получением в соленоиде на короткий промежуток времени характеристического магнитного поля заданной величины. Передача пускового сигнала осуществляется буровым контроллером с поверхности скважины при помощи подходящих для этого устройств связи. Во второй выбранной точке во второй скважине находится датчик магнитного поля. Функцией указанного датчика является измерение трех векторных составляющих характеристического магнитного поля соленоида в указанной второй точке. Электронные схемы для определения пространственных координат датчика магнитного поля расположены во второй точке второй буровой скважины. В устройстве также предусмотрен процессор, который в ответ на измеренные пространственные координаты указанного датчика и измеренные векторные составляющие магнитного поля во второй точке второй буровой скважины, и затем в ответ на заданную величину характеристического магнитного поля соленоида, определяет расстояние и направление между первой и второй точками.
Характеристическое магнитное поле образуется при использовании одного или нескольких функционирующих от электропитания маяков с источником электромагнитного поля, установленных в первой скважине. Магнитное поле от маяков регистрируется установленной во второй скважине геодезической электронной аппаратурой для проведения измерений в скважине в процессе бурения. Первая скважина может служить в качестве реперной, а скважинный прибор каротажа в процессе бурения может располагаться вблизи работающей в скважине буровой головки. Каждый маяк с источником электромагнитного поля содержит катушку с проволочной обмоткой, навитой вокруг стальной муфты (трубной муфты), соединяющей два отрезка стальных труб в реперной скважине. Электропитание маяков осуществляется через электронный блок. Модуль управления в составе электронного блока производит непрерывное "прослушивание" на предмет наличия и распознавания "пускового" сигнала, подаваемого буровым мастером. При получении "пускового" сигнала на маяк в течение короткого промежутка времени подается электропитание, и в течение указанного промежутка времени маяком генерируется электромагнитное поле, характер которого оценивается скважинным устройством каротажа в процессе бурения. Схемы коммутации периодически изменяют направление генерируемого электромагнитного поля, а результаты изменений векторных составляющих электромагнитного поля используются для определения координат относительного местоположения буровой головки и маяка в соответствии с хорошо известными математическими методами.
Источник магнитного поля и блоки электронных схем электропитания являются составными элементами обсадки реперной скважины либо они могут входить в состав установленной в ней временной спусковой колонны для спуска обсадных колонн-хвостовиков. Во многих случаях каждый маяк запитывается всего лишь несколько раз за весь период службы, и, в общем случае, множество маяков подлежит установке по длине реперной скважины, в частности, при таком важном виде работ, проводимых на нефтепромыслах, как бурение парных скважин для гравитационного дренажа пласта с использованием пара.
В соответствии со вторым аспектом изобретения, способ для измерения расстояния между двумя буровыми скважинами в грунте и для определения их направления состоит из этапа установки электромагнитного узла в первой выбранной точке в первой буровой скважине, причем первая буровая скважина имеет известный угол отклонения от вертикали и известное направление в указанной выбранной точке, этапа размещения датчика магнитного поля во второй выбранной точке во второй буровой скважине для измерения магнитного поля и векторных составляющих силы тяжести в указанной второй точке. Далее определяются пространственные координаты датчика магнитного поля, причем электромагнитный узел оснащен блоком электронных схем, находящихся в режиме активного ожидания пускового сигнала. Посылка пускового сигнала производится удаленным преобразователем по команде контроллера управления бурением, и в результате этого в катушке соленоида начинает протекать электрический ток заданной величины с получением в соленоиде на короткий промежуток времени характеристического магнитного поля с известным значением.
Способ также включает измерение векторных составляющих указанного характеристического магнитного поля при помощи датчика, расположенного во второй точке во второй буровой скважине, и определение расстояния и направления между первой и второй точками на основании измеренных пространственных координат датчика и измеренных векторных составляющих указанного характеристического магнитного поля во второй точке во второй буровой скважине.
Способ и устройство по своей сущности отличаются дальним диапазоном действия, и, помимо этого, они обеспечивают прецизионность измерений и применимы для решения множества задач.
Краткое описание чертежей
Вышеуказанные объекты, признаки и преимущества настоящего изобретения станут более понятны специалистам в уровне техники из нижеследующего описания предпочтительных вариантов осуществления изобретения с учетом прилагаемых чертежей со следующими фигурами:
на Фиг.1 схематически показана система по изобретению так, как она используется при бурении парных скважин для гравитационного дренажа пласта с использованием пара;
на Фиг.2 схематически показаны соленоид и блок электронных схем системы, показанной на Фиг.1, установленные по длине обсадной трубы;
на Фиг.3 схематически показана обмотка считывания током с электромагнитной коммутацией для включения в цепь соленоида, показанного на Фиг.2;
на Фиг.4 схематически показана пара скважин для гравитационного дренажа пласта с использованием пара, где изображен маяк с электромагнитной связью и источник тока для передачи кодированного "пускового" сигнала;
на Фиг.5 показано общее расположение системы бурения скважин для гравитационного дренажа пласта с использованием пара и акустическим запуском;
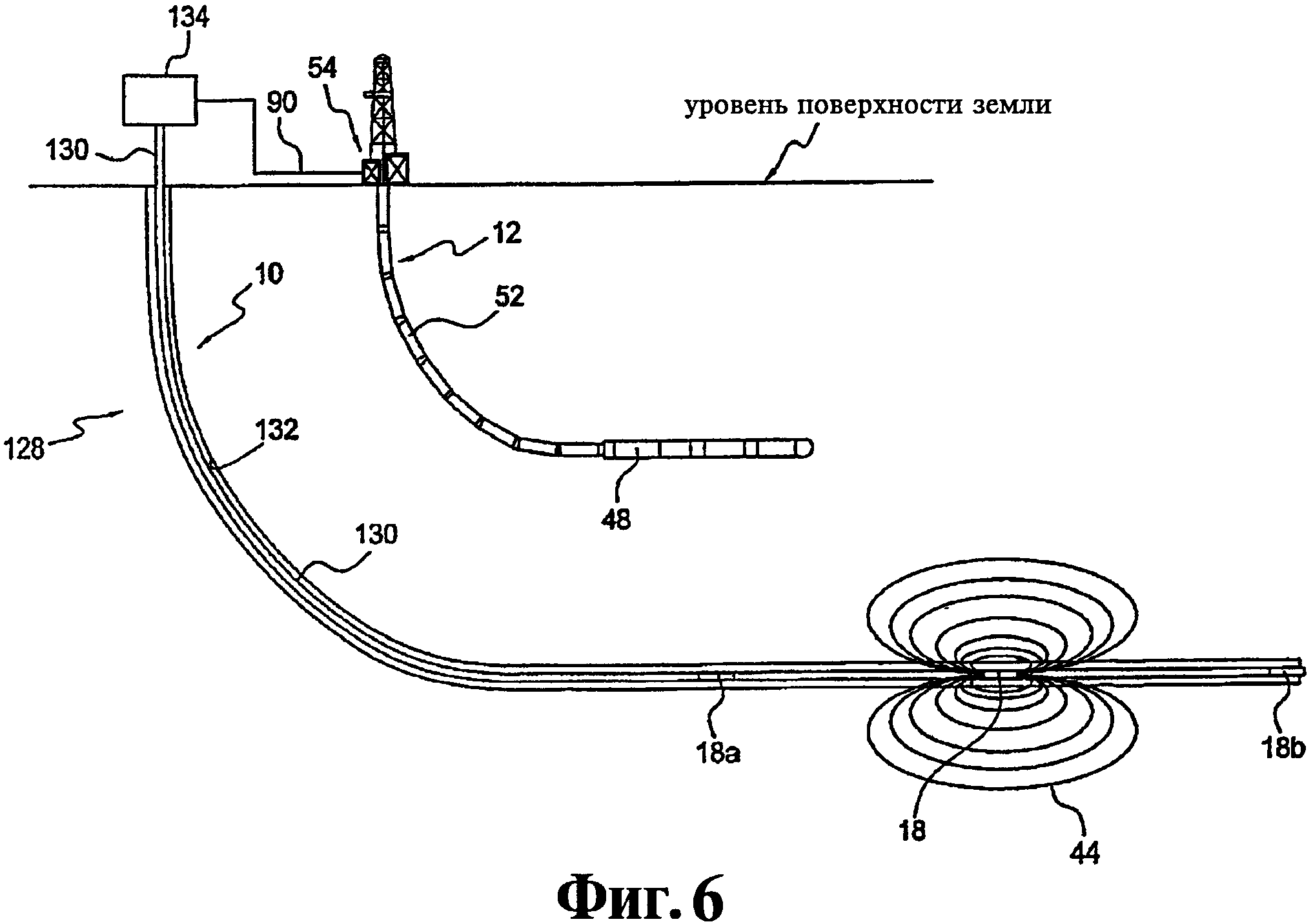
на Фиг.6 показана пара скважин для гравитационного дренажа пласта с использованием пара, где источник магнитного поля маяка на соединительной муфте установлен на трубе спусковой колонны;
на Фиг.7 показана труба спусковой колонны для гравитационного дренажа пласта с использованием пара с группой источников магнитного поля маяков при использовании изолированного провода для подачи электропитания и сигналов связи с источниками магнитного поля маяков;
на Фиг.8 показано общее расположение системы бурения скважин для гравитационного дренажа пласта с использованием пара, в составе которой имеется спусковая колонна с проходящим внутри изолированным проводом;
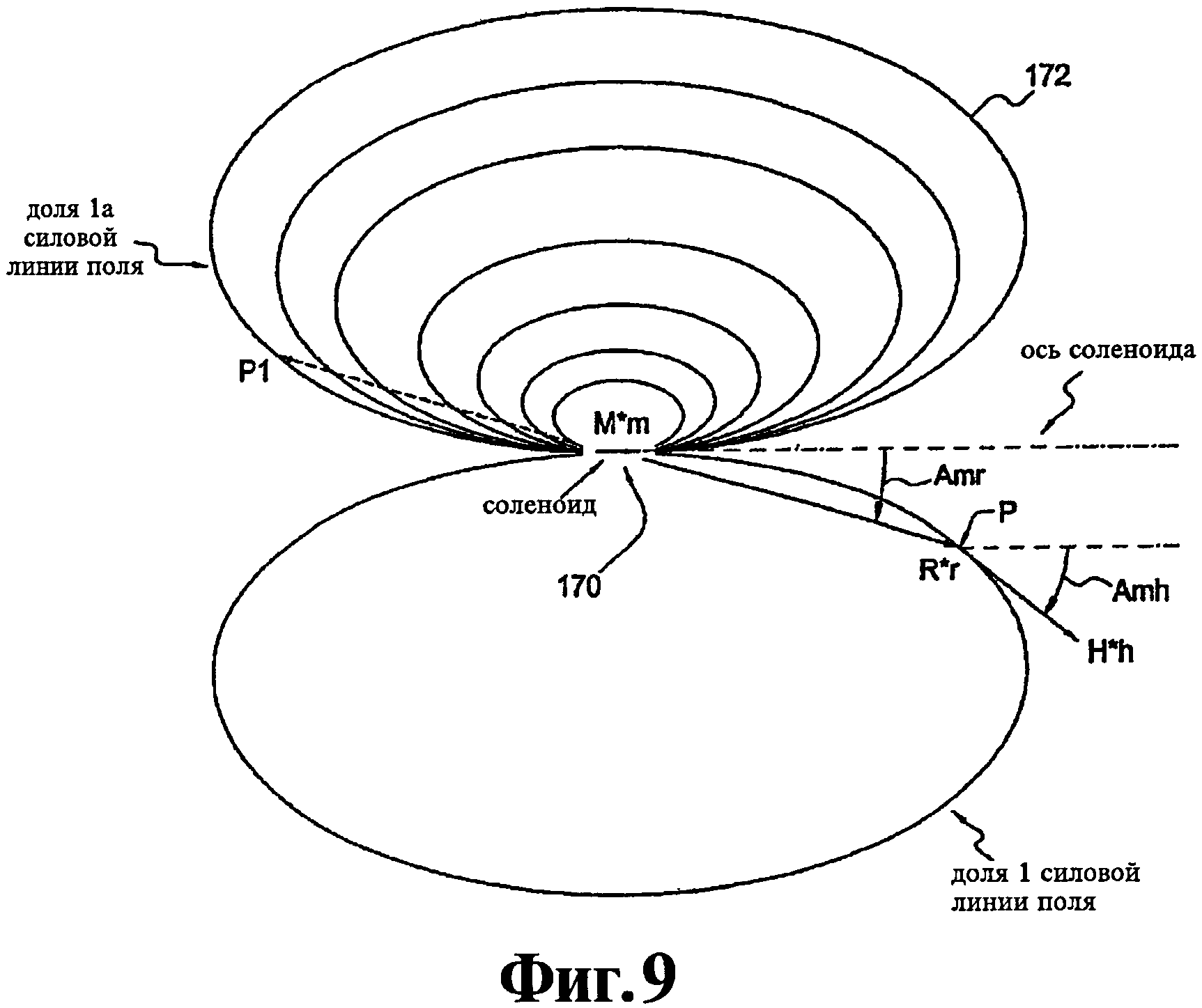
на Фиг.9 показаны силовые линии магнитного поля, лежащие в плоскости, которая определяется векторами m и h; и
на Фиг.10 показана графическая зависимость для определения угла Amr от угла Amh.
Осуществление изобретения
Далее обратимся к более подробному описанию настоящего изобретения. На Фиг.1 представлен общий вид системы из двух скважин 10 и 12 на нефтяном месторождении 14 для добычи нефти из пласта вязких, битумных углеводородов методом гравитационного дренажа пласта с использованием пара. Как показано на схеме, предварительно пробуренная скважина 10 имеет обсадной горизонтальный участок, который служит в качестве реперной скважины, в то время как бурение скважины 12 осуществляется с прохождением траектории ствола вблизи горизонтального участка первой скважины и параллельно данному участку. Практика данной важной технологии нефтедобычи предусматривает подачу пара в верхнюю скважину 12 для вытапливания битума с последующим его стеканием в нижнюю скважину 10 для извлечения из нее на уровень земной поверхности при помощи насосного оборудования. Важным условием добычи сырья из подобных парных скважин является то, что горизонтальные участки этих скважин, расположенные в пласте углеводородов, должны проходить строго параллельно друг другу с точно выдержанным расстоянием между участками. В обычном случае протяженность горизонтальных ветвей указанных парных скважин составляет 1,5 км с расстоянием между ними 5 +/- 1 м. Важным преимуществом данного изобретения относительно способов, известных в предшествующем уровне техники, является то, что при бурении второй скважины не требуется доступа к первой "реперной" скважине.
Бурение реперной скважины 10 производится с использованием серийного бурильного комплекта, содержащего обычно двигатель буровой установки и колонковый буровой снаряд с возможностью наклонного бурения, оснащенный электронным блоком управления, подобным тому, который используется в системе скважинных измерений в процессе бурения. Бурение первой скважины осуществляется по заданной траектории с использованием обычных методов управления и с последующей обсадкой скважины стальными трубами, как в общем виде показано на поз.16. В соответствии с предпочтительным вариантом осуществления настоящего изобретения, в процессе обсадки скважины между отрезками обсадных труб в заданных точках устанавливаются один или более электромагнитных маяков 18, причем каждое из таких устройств конструктивно объединено с соединительной муфтой обсадной трубы, о чем будет упомянуто далее. Бригада специалистов по обсадке скважин устанавливает указанные соединительные муфты с электромагнитными маяками таким же образом, как это производится при установке обыкновенных соединительных муфт на трубы, хотя указанная операция может производиться с соблюдением определенного полярного согласования в ориентации данных соединительных муфт с электромагнитными маяками. Указанные соединительных муфты могут устанавливаться в качестве постоянных участков обсадных труб реперной скважины 16 или в качестве муфт для соединения труб спусковой колонны, установленной внутрь реперной скважины, о чем также будет упомянуто далее.
Несколько месяцев спустя после обсадки трубами реперной скважины приступают к бурению второй скважины 12 по заданной параллельной траектории относительно ствола скважины 10. В процессе бурения указанной второй скважины на электромагнитные маяки по изобретению подается электропитание, для того чтобы обеспечить бурового мастера периодически получаемыми и обновляемыми посредством измерений данными о координатной привязке новой скважины к местоположению реперной скважины в целях предотвращения отклонений от заданного направления бурения. Общепринятой практикой в работе бурового мастера при бурении скважин является периодическое определение координат буровой головки и направления бурения с использованием получаемых непосредственно в процессе бурения результатов измерений геомагнитного поля и определения направления действия силы тяжести по мере того как новый отрезок буровой трубы устанавливается в бурильную колонну. Именно в эти промежутки времени, одновременно с проведением прочих измерений, на электромагнитный маяк внутри реперной скважины может быть подан пусковой сигнал для кратковременного включения маяка для проведения непосредственно при бурении скважины измерений составляющих электромагнитного поля от указанного электромагнитного маяка. Измерения электромагнитного поля этого маяка могут осуществляться по методике, изложенной в патенте США №60/814, 163. После определения на основании указанных измерений относительного положения бурильной головки и направления бурения для последующего цикла бурения скважины 12 производится коррекция по направлению с внесением курсовых поправок, если это необходимо.
На Фиг.2 показано поперечное сечение электромагнитного маяка 18, предназначенного для применения при бурении парных скважин для гравитационного дренажа пласта с использованием пара. Указанный маяк имеет в своем составе соединительную муфту 19, например, в виде стальной трубы, имеющую длину приблизительно 1 метр и внутреннюю резьбу 20 и 22 на своих противоположных концах. Данная соединительная муфта 19 используется для соединения пары стандартных отрезков труб, которые обычно представляют собой отрезки 23 и 24 нижней трубы обсадной колонны со щелевидными продольными отверстиями, длина которых составляет примерно 12,0 м, а диаметр 7 дюймов (175 мм). При помощи нескольких электромагнитных маяков 18, 18а, 18б и т.д. возможно соединить встык соответствующие отрезки обсадных труб с формированием нефтеносной части 26 скважины 10 в ее нижнем конце, как показано на Фиг.1. Электромагнитные маяки 18, 18а, 18б и т.д. представляют собой полностью автономные устройства, которые устанавливаются, как обыкновенные соединительные муфты для обсадных труб. Они также имеют похожую конструкцию. Так, как показано на Фиг.2, каждый электромагнитный маяк 18 содержит катушку, которая навита вокруг корпуса соединительной муфты 19 и уложена в канавке 30, выполненной в боковой стенке 32 муфты. В предпочтительном варианте, катушку пропитывают эпоксидным компаундом и закрывают стекловолокном или кевларом. Дополнительно, катушка может быть закрыта защитной крышкой 34 из немагнитной нержавеющей стали, которая входит в выемку 36, выполненную в боковой стенке 32, оказываясь таким образом на одном уровне с наружной поверхностью 37 боковой стенки. Блок электронных схем, датчик пускового сигнала и комплект батарей герметично "залиты" эпоксидным компаундом в небольших выемках, выполненных по окружности муфты 19, конструктивно образуя таким образом электромагнитный маяк 18. Каждый электромагнитный маяк после установки находится в режиме ожидания включения, либо "пускового" сигнала, и получивший его маяк генерирует соответствующее магнитное поле, обозначенное соответственно на Фиг.1 силовыми линиями магнитного поля 44, 44а и 44б. Поле возникает на короткий промежуток времени, либо импульсно, что является достаточным для выполнения необходимых измерений прибором 48 для каротажа в процессе бурения.
В одном примере основная катушка 28 для генерирования магнитного поля имела длину 500 мм и состояла из 500 витков стандартного обмоточного провода для электромагнитов №18, нанесенных в один слой на соединительную муфту 19 диаметром 175 мм с образованием соленоида. Катушка была тщательно пропитана эпоксидным компаундом и покрыта защитным слоем стекловолокна толщиной примерно 3 мм. При необходимости вместо стекловолокна можно использовать кевлар. Катушка в дополнение к этому была закрыта защитной крышкой 34 из немагнитной нержавеющей стали, хотя в этом нет необходимости в большинстве случаев. Отрезки стальных обсадных труб 23 и 24, проходящие от соответствующих концов соединительной муфты, становятся неотъемлемой частью ферромагнитного сердечника соленоида, межполюсное расстояние которого много больше длины соединительной муфты.
Передача пускового сигнала, вызывающего включение электромагнитного маяка, может осуществляться любым из целого ряда способов. Простейший способ предусматривает наличие источника акустических волн в составе оборудования для каротажа в процессе бурения. Как показано на Фиг.1, в состав оборудования 48 для каротажа в процессе бурения, расположенного на буровом инструменте 50 бурильной колонны 52, находящейся в скважине 12, входит источник акустических волн 53 с возможностью включения и передачи акустического импульса из точки каротажа. В указанном случае прибор для каротажа в процессе бурения содержит датчик для распознавания кодированных импульсов давления в буровом растворе, которые посылаются в заданной форме с пульта управления бурильщика 54, расположенного, например, на буровой вышке, стоящей на поверхности земли. Формирование кодированных импульсов может производиться в соответствии с хорошо известным способом, когда включают и затем выключают штатный насос подачи в скважину бурового раствора, создавая тем самым в буровом растворе импульсы давления заданной кодированной формы. Затем, в ответ на полученные импульсы давления в буровом растворе, установка для каротажа в процессе бурения посылает акустический импульс, как показано в поз.56 на Фиг.1, на электромагнитные маяки, установленные в скважине 10. Акустический импульс может иметь кодированную форму для включения лишь одного маяка из группы электромагнитных маяков 18, 18а, 18б и т.д., а от сигнала акустического датчика, имеющегося в составе электронного блока маяка, расположенного в выемках 38 или 40, в катушку 28 соленоида подается электрический ток, и образуется соответствующее поле, состоящее из магнитных полей 44, 44а, 44б и т.д.
Во многих случаях при проведении буровых работ, предусматривающих гравитационный дренаж с использованием пара, вместо системы, работающей по импульсам давления для передачи данных между поверхностью земли и прибором для каротажа, в процессе бурения находящегося в скважине, используется электромагнитная система связи. В этом случае электрические сигналы передаются по бурильной колонне 52 и принимаются прибором для каротажа в процессе бурения скважины. Если необходимо, при помощи кодирования указанные сигналы могут быть использованы для запуска электромагнитного маяка с включением соответствующего акустического излучателя в приборе для каротажа в процессе бурения скважины и получения импульса либо последовательности импульсов 56 для их детектирования электромагнитными маяками в реперной скважине 10 и включением заданного маяка.
В другом варианте относительно несложным решением является включение в состав каждого маяка датчика магнитного поля для включения заданного маяка магнитными полями, создаваемыми током, протекающим по бурильной колонне 52 в скважине 12, либо для включения заданного маяка сигнальным током, протекающим по колонне обсадных труб 58 реперной скважины 10, состоящей из соединенных встык отрезков обсадных труб, таких как отрезки 23 и 24, описанные выше. Для данной цели, как показано на Фиг.3, подобный датчик магнитного поля содержит измерительную обмотку 60 тороидального трансформатора на сердечнике 62 из сплава "пермаллой" с высокой магнитной проницаемостью, расположенным в канавке 64, навитым вокруг соединительной муфты 66 электромагнитного маяка, которая во всех прочих отношениях близка по конструкции маяку 18. Тороидальная обмотка 60, которая также может быть пропитана эпоксидным компаундом и закрыта стекловолокном или кевларом, служит в качестве измерительной катушки, либо чувствительного элемента, для обнаружения магнитных полей, создаваемых кодированными сигналами переменного тока, протекающего по бурильной колонне 52 либо по колонне обсадных труб 58 реперной скважины. Данная измерительная обмотка присоединена через усилитель малой мощности с низким уровнем шума к электронному блоку, расположенному в выемке 38 или 40, а указанный усилитель соединен с передающей обмоткой 28, которая аналогична вышеописанной обмотке согласно Фиг.2, образуя тем самым электромагнитный маяк 70 модифицированной конструкции, как показано на Фиг.3 и 4. Далее будет показано, что элементы, обозначенные на Фиг.1-4 похожим образом, являются одинаковыми.
Когда кодированный "пусковой" сигнал посылается электромагнитным способом с пульта управления бурильщика 54 по бурильной колонне 52, то он обнаруживается прибором 48 для каротажа в скважине в процессе бурения (Фиг.1) с формированием сигналов управления буровым инструментом. Помимо этого, бурильная колонна 52 является источником кругового магнитного поля, окружающего указанную бурильную колонну, и данное поле дистанционно обнаруживается маяком, установленным в обсадке реперной скважины, каким как маяк 70, что приводит к включению указанного маяка.
Помимо объединения схем электромагнитной связи для управления работой маяка при помощи программных средств прибора 48 для каротажа в скважине в процессе бурения, нередко может быть полезным иметь независимую систему связи электромагнитного маяка, такую, которая обозначена поз.80 на Фиг.4, для совместной работы с маяком 70. Создание такой независимой системы для проведении описываемых в настоящей заявке буровых работ, предусматривающих гравитационный дренаж с использованием пара, осуществляется просто опусканием электрода 82 на изолированном каротажном кабеле 84 в приблизительно вертикальную часть 86 реперной скважины 10 с возможностью контакта электрода с обсадкой реперной скважины 58. На уровне земли каротажный кабель 84 подключают к источнику тока 88 с возможностью подачи от него в обсадку реперной скважины 58 через электрод 82 кодированного цифрового сигнала, сила тока которого составляет несколько ампер, а частота, например, составляет около 10 Гц. Протекание указанного тока по обсадке реперной скважины обнаруживается кольцевой чувствительной обмоткой 60, имеющейся в составе маяка 70. Для надежного обнаружения сигнала при помощи кольцевой обмотки 60 требуется протекание тока очень малой величины. Следовательно, необходимо только, чтобы незначительная часть тока, пропускаемого по обсадке реперной скважины через электрод 82, протекала через муфту 66, а значит, и через полоску из сплава "пермаллой", либо сердечник 62, кольцевой чувствительной обмотки 60. Приемный электронный блок, расположенный в выемке 38 или 40 каждого маяка 70, имеющегося в составе обсадки скважины, реагирует лишь на заданный цифровой код, являющийся частью "пускового" сигнала, подаваемого с пульта управления бурильщика 54 и при помощи которого осуществляется управление источником тока 88 по линии управления 90. Как только заданный маяк принимает "пусковой" сигнал, электронный блок указанного маяка включает обмотку соленоида с получением соответствующего магнитного поля 44 вблизи колонны обсадных труб реперной скважины в месте расположения указанного маяка.
На Фиг.5 представлена комплексная система управления бурением 100, содержащая муфту-маяк 102, схожую с вышеуказанными конструктивными решениями по настоящему изобретению. В составе изображенной системы, которая является одним из примеров осуществления настоящего изобретения, имеется пульт управления бурильщика 104, находящийся на уровне земли с возможностью передачи, приема и обработки данных для управления заданным образом буровыми работами. Для связи с внутрискважинным оборудованием 105 контроллер производит передачу и прием данных в виде импульсов давления 106 при помощи датчиков и преобразователей давления 107 и 108, установленных в контроллере и во внутрискважинном оборудовании соответственно. Импульсы 106 проходят в буровом растворе внутри бурильной колонны скважины. Импульсы, передаваемые преобразователем давления 107, расположенным на поверхности земли, принимаются внутрискважинным датчиком давления 108 и направляются в стандартный блок каротажа 110 в процессе бурения, установленный на буровой установке. Источником волн давления также может быть "яс", имеющийся в бурильной колонне в разбуриваемой скважине. Подобные средства для высвобождения бурового инструмента являются частью оснастки большинства буровых снарядов и позволяют буровому мастеру освобождать прихваченную в скважине буровую головку.
Акустический преобразователь 112, являющийся частью скважинного оборудования 105, соединен с блоком каротажа 110 в процессе бурения, например, через электронный блок 114, который содержит генератор звука и акустический датчик, а также датчики электромагнитного поля для обнаружения поля, создаваемого муфтой-маяком 102. В состав электронного блока 114 входит процессор, который реагирует на кодированные сигналы, получаемые с пульта управления бурильщика 104 блоком каротажа 110 в процессе бурения с формированием соответствующего акустического импульса 120. Данный акустический импульс, или импульс малой длительности 120, формируемый скважинным оборудованием 105, расположенным в разбуриваемой скважине, проходит сквозь разделительную геологическую формацию и определяется датчиком 122 на маяке 102 и поступает на его усилитель приема и процессор 124. В большинстве случаев акустического импульса длительностью 1 сек будет достаточно для связи с маяком. Это позволяет использовать приемник очень малой мощности с очень узкой полосой пропускания для отстройки от интенсивных шумов, идущих в широком диапазоне частот от бурильной головки в процессе реального бурения. В предпочтительном варианте осуществления изобретения, каждый из приемников маяка с момента установки данного маяка в колонну обсадных труб непрерывно находится в режиме ожидания пускового импульса. В большинстве случаев бывает выгодным иметь у данного импульса малой длительности простую кодировку с тем, чтобы осуществлялось включение только заданного маяка.
Как указано выше, акустический импульс малой длительности подается буровым мастером с пульта управления бурильщика 104 путем включения и выключения заданным образом насосов подачи бурового раствора. При данной операции импульсы давления 106 идут от датчика 107 через буровой раствор в бурильной колонне. Эти импульсы давления воспринимаются скважинным датчиком давления 108, соединенным с блоком каротажа 110 в процессе бурения и электронным блоком 114 с формированием соответствующих акустических сигналов. Реакцией заданного маяка на акустический импульс малой длительности является пропускание электрического тока по обмоткам соленоида 28 маяка с закодированной полярностью и током соленоида, как указано выше, с образованием соответствующего электромагнитного поля 44. Электромагнитные датчики блока каротажа 110 в процессе бурения или подсоединенного к нему электронного блока 114 получают усредненный сигнал с обработкой трех векторных составляющих переменного электромагнитного поля 44, создаваемого соленоидом. Аппаратура для внутрискважинных измерений, выпускаемая компанией Vector Magnetics LLC, г.Итака, шт.Нью-Йорк, имеет в своем составе чувствительные элементы для измерения переменного магнитного поля. Хотя большинство поставляемых блоков каротажа в процессе бурения запрограммированы только на измерение геомагнитного поля и трех векторных составляющих силы тяготения. Поэтому для получения функции измерения образуемого маяком переменного электромагнитного поля 44 необходимо либо перепрограммирование электронных блоков обработки сигналов, имеющихся в составе такой стандартной аппаратуры, либо использование дополнительного блока 114 для обработки сигналов переменного тока, как схематично показано на Фиг.5.
Электронный блок 126 в составе маяка 102, расположенный в вышеуказанных выемках 38 или 40, включает в себя стандартный канал связи процессора с периферийными устройствами (КСПУ) и коммутационную цепь на полевых транзисторах (ПТ) для запитывания катушки 28 соленоида в течение 10 секунд током величиной 1 ампер с переменной частотой около 2 Гц. В целях удобства, частоту изменения полярности поля делают обратно пропорциональной величине пропускаемого по катушке тока так, чтобы произведение полученного магнитного момента и времени возбуждения было постоянной величиной, обеспечивая таким образом постоянство величины полного электромагнитного сигнала, даже если имеет место изменение напряжения батареи источника питания в зависимости от токовой нагрузки и срока службы. Полярность электромагнитного поля может определяться по текущей полярности первого полупериода токового сигнала.
Комплект из четырех или пяти щелочных батарей типоразмера "АА" в состоянии обеспечить магнитный момент около 200 ампер/м2, что является достаточным условием для определения расстояния по меньшей мере в диапазоне 30 м. Получение тока величиной 1 ампер от батареи типоразмера "АА" создает нагрузку на указанную батарею с напряжением в разомкнутой цепи от 1,56 до 1,3 вольт. Емкость такой батареи составляет около 0,5 ампер-часов. Экспериментальным путем было установлено, что данные батареи и используемые микросхемы работоспособны и не требуют помещения в защитный корпус при давлении по меньшей мере 20670 кПа. Следовательно, соблюдаются типовые требования, предъявляемые к проведению множества видов буровых работ для гравитационного дренажа пласта с использованием пара.
Как только электромагнитный маяк начинает работать в своем диапазоне дальности, создаваемое им магнитное поле может быть обнаружено внутрискважинным каротажным прибором с определением относительного расстояния между скважинами и определением геодезической точки привязки. Бурение затем продолжается, предпочтительно с использованием типовых способов, до контакта со следующим маяком, который может быть расположен в скважине на 100 и более метров глубже.
Информация о векторных составляющих усредненного сигнального магнитного поля, определяемых блоком каротажа в процессе бурения, совместно с информацией о величине геомагнитного поля и акселеметрическими данными, полученными от прибора для измерений в процессе бурения и использованными для определения азимутального угла, зенитного угла и угла бокового наклона бурового снаряда, передаются на пульт управления бурильщика, расположенный на поверхности земли, с использованием датчиков и преобразователей 108 и 107 для испускания и приема импульсов давления 106, проходящих известным образом через буровой раствор.
В большинстве случаев конструкция электромагнитных маяков с батарейным питанием, работа которых основана на использовании излагаемых здесь принципов, для создания переменного магнитного поля и обеспечения способов обнаружения указанного поля с использованием сигналов переменного тока значительно проще той конструкции, которая необходима для реализации способов с использованием сигналов постоянного тока. Кроме этого, способы обнаружения магнитного поля с использованием сигналов переменного тока обеспечивают значительно больший радиус действия при заданном потреблении электрической мощности, чем способы обнаружения магнитного поля с использованием электромагнитных маяков, работающих на постоянном токе. Также допустимо использовать энергию батарей для возбуждения маяка постоянным током, поскольку нередко бывает оправданным использование стандартного и широко представленного на рынке каротажного оборудования, позволяющего измерять лишь векторные составляющие геомагнитного поля.
Использование источников постоянного магнитного поля в составе систем для управления бурением описано в патенте США № Re 036569, причем электромагнитное поле, генерируемое при помощи постоянного тока, сначала образуется на короткий промежуток времени и имеет только один знак полярности, затем полярность поля на короткий промежуток времени становится противоположной. В течение каждого промежутка времени выполняется измерение полной величины геомагнитного поля. При вычитании трех векторных составляющих измеренного в двух случаях полного геомагнитного поля возможно нахождение вектора электромагнитного поля, создаваемого постоянным магнитным полем. Обработанная информация о трех векторных составляющих полученного электромагнитного поля объединяется в поток данных стандартного блока каротажа в процессе бурения и передается в виде импульсов давления, посылаемых по буровому раствору, в распоряжение бурового мастера для последующей обработки.
На Фиг.6 и 7 представлены несколько вариантов осуществления изобретения, которые в особенности пригодны для случая запитки соленоида вышеуказанного устройства постоянным током. В соответствии с вариантом, показанным на Фиг.6, в котором имеющиеся на предыдущих фигурах чертежей элементы обозначены одинаковыми номерами, система маяков, обозначенная в общем случае номером 128, содержит совокупность источников магнитного поля, заключенных в муфтах-маяках, таких как 18, 18а и 18б, которые выполнены как часть временной спусковой колонны 130 для спуска обсадных колонн-хвостовиков. В указанном варианте спусковая колонна 130 может состоять из секций труб диаметром 2,875 дюйма (72 мм), соединенных встык при помощи группы автономных муфт-маяков 18, 18а и 18б и т.д., причем спусковая колонна 130 временно помещается в обсадную трубу 132 реперной скважины незадолго до начала бурения второй скважины в паре. После окончания бурения второй скважины 12 спусковая колонна 130 извлекается, а муфты-маяки снимаются. В данном варианте расположения элементов вопрос о наличии места для размещения батарей электропитания и электронных схем не стоит, поскольку для этого может быть использован весь свободный объем внутри спусковой колонны, и поэтому становится гораздо легче сделать мощный реверсивный источник магнитного поля с соленоидом на постоянном токе. В указанном способе нет необходимости в отдельном каротажном кабеле, таком как каротажный кабель 84, упомянутый выше, и поскольку спусковая колонна 130 находится в рабочем положении внутри реперной скважины в процессе бурения скважины 12, то нет необходимости иметь наготове в течение всего процесса бурения бригады рабочих для последовательной установки в горизонтальной реперной скважине либо соленоида, раскрытого в патенте США Re 036,569, либо первичных измерительных преобразователей, раскрытых в патенте США 5,589,775.
По спусковой колонне 130 возможна передача сигналов связи таких, которые описаны применительно к системе на Фиг.4, где в обсадную трубу посредством электрода 82 подается ток для обнаружения сигнала при помощи датчика в виде тороидальной обмотки 60. Однако обычно желательно не допускать прокладывания электрической проводки между поверхностью и электромагнитными маяками. Таким образом, система связи для дистанционного запуска в работу электромагнитных маяков с батарейным питанием способна быть эффективной даже при использовании временных спусковых колонн. Осуществить такой запуск возможно при помощи акустических волн, передаваемых из места проведения скважинных измерений в процессе бурения, как описано применительно к Фиг.5.
На Фиг.6 представлен иной вариант осуществления изобретения, в котором со стороны поверхности земли предусмотрена установка передатчика импульсов давления 134 на спусковой колонне 130 или на обсадной трубе 132 в реперной скважине 12. Данный передатчик "простукивает" спусковую колонну или обсадную трубу, посылая тем самым ударные волны или волны сжатия - расширения по спусковой колонне 130 или обсадной трубе 132. Указанные волны могут быть носителями кодированных пусковых сигналов, которые затем обнаруживаются пьезоэлектрическими, сейсмическими или гидроакустическими датчиками, имеющимися в составе конкретной муфты-маяка 18, 18а, 18б, для запуска в заданном маяке соответствующей схемы, генерирующей электромагнитное поле. Импульсы давления с кодовым сигналом также могут посылаться через жидкую среду в реперной скважине, либо это может быть сделано при помощи импульсов давления, формируемых в разбуриваемой скважине 12 таким образом, как это описано выше, и данные импульсы давления воспринимаются конкретными маяками, установленными на спусковой колонне 130 в обсаженной реперной скважине.
Как показано на Фиг.7, иногда имеется возможность проложить в реперной скважине изолированный электрический провод 140, в частности внутри временной спусковой колонны 130, как для подачи электропитания, так и для связи с группой внутрискважинных маяков, таких как маяки 18, 18а, 18б и т.д. Когда данная операция выполнена, обычно желательно использовать единую электропроводную систему, соединенную с источником тока 142 на поверхности скважины. Это может быть либо источник переменного тока управления, либо источник постоянного тока управления, причем в качестве обратного питающего электрода 144 может использоваться труба спусковой колонны 130 либо труба обсадной колонны 132. На схеме Фиг.7 изображен провод 140, проходящий внутри спусковой колонны 130, для подачи на маяки питающего тока величиной несколько ампер и передачи телеметрических сигналов для связи заданными маяками.
На Фиг.8 представлена комплексная электронная автоматизированная система управления 150 для использования с устройством, изображенным на Фиг.7. Входящие в состав системы пульт управления бурильщика 54, система передачи импульсов давления по буровому раствору с преобразователями и датчиками давления 107 и 108 и аппаратные средства 110 для каротажа в процессе бурения аналогичны тем, которые описаны выше и широко используются на практике. Программное обеспечение каротажных средств обеспечивает проведение последовательно двух измерений полного геомагнитного поля по мере бурения скважины. После останова бурения, когда необходимо проводить геодезические измерения для оценки кривизны разбуриваемой скважины, буровой мастер производит включение приемопередающих средств блока телеметрии 152, расположенного на поверхности реперной скважины 10, с использованием линии управления 90, упомянутой выше в связи с описанием Фиг.4 и 7, или радиоканала 154, показанного на Фиг.8, для подачи высокочастотного телеметрического сигнала с частотой около 200 кГц по изолированному проводу 140, проходящему внутри спусковой колонны 130. Группа маяков 156, 158, 160 и т.д., каждый из которых схож с вышеуказанным маяком 18, подключена к спусковой колонне 130, и каждый маяк имеет в своем составе электронные средства телеметрической связи, такие как электронный блок 162, изображенный применительно к маяку 160, причем каждый маяк настроен на получение сигнала определенной частоты. Например, в устройстве на Фиг.8 маяк 156 находится в ожидании сигнала частотой 190 кГц, маяк 158 находится в ожидании сигнала частотой 200 кГц, а маяк 160 находится в ожидании сигнала частотой 210 кГц и т.д. Каждый блок телеметрии реагирует на соответствующий кодированный телеметрический сигнал с приведением в действие соответствующего блока управления через программируемый контроллер интерфейса, имеющий схему коммутации на полевых транзисторах, такого как блок 164, предназначенный для маяка 160, и с включением заданного маяка. Таким образом, буровой мастер может осуществить включение заданного маяка с получением конкретной полярности поля и временем возбуждения маяка электрическим током. Электрическая энергия для возбуждения маяка одновременно подается по изолированному проводу 140 в виде постоянного тока, либо постоянного тока заданной полярности, либо в виде переменного тока.
Как указано выше, каждый маяк, таким образом, оснащен автономным электронным блоком, в состав которого помимо программируемого контроллера интерфейса (ПКИ) также входят электронные схемы для регулирования и измерения тока в соленоиде и средства телеметрии, которые делают возможным подачу в обмотку соленоида тока возбуждения требуемой величины. Следовательно, непосредственно в маяк может быть пущен либо переменный ток, либо постоянный ток с положительной полярностью и величиной в несколько ампер на период 10 секунд, в течение которого прибор для внутрискважинного каротажа, установленный на буровом снаряде, осуществляет измерение полного геомагнитного поля. Затем осуществляется запитывание маяка постоянным током отрицательной полярности с выполнением аналогичного измерения. Вычитанием друг из друга значений полного геомагнитного поля, полученных в результате указанных измерений, получают векторные составляющие электромагнитного поля, генерируемого маяком, а вычислением среднего значения по двум измеренным величинам можно получить векторные составляющие геомагнитного поля. Результаты измерений передаются на процессор обработки данных, который может входить в состав пульта управления бурильщика 54, для последующего вычисления координат местоположения и направления бурения скважины 12 с внесением курсовых поправок для следующего цикла бурения, после чего аналогичные измерения проводятся вновь. После того как данный маяк оказывается слишком далеко позади точки бурения, чтобы обеспечивать достаточную точность измерений, процесс бурения продолжается уже с использованием обычных способов управления буровым инструментом без ориентации на маяк вплоть до вхождения в радиус действия следующего маяка, где измерения проводят в такой же последовательности.
Несмотря на раскрытие нескольких систем расположения электромагнитных маяков, а также способов осуществления связи с указанными маяками, способов возбуждения данных маяков и способов обнаружения магнитного поля, в дальнейшем станет понятным, что допускается их использование в различных сочетаниях в целях соблюдения детальных требований к проведению буровых работ.
Применительно к затрагиваемым в настоящем изобретении буровым работам для гравитационного дренажа пласта с использованием пара, в уровне техники хорошо известны подробные математические методики, подходящие для успешно используемых на практике способов определения координат буровой головки и направления бурения скважин. Данный вопрос освещался в различных опубликованных источниках, например в патенте США №6,814,163. Для специалиста в уровне техники с физико-математической подготовкой не составит особого труда применить алгебраические преобразования математических величин, указанные в вышеупомянутом патенте, к совокупности измерительных средств по настоящему изобретению. Нижеследующее описание отличительных признаков данной математической методики позволит в общих чертах уяснить суть указанного способа.
Общий анализ задачи представлен на Фиг.9, на которой изображена геометрическая интерпретация поля магнитного диполя, генерируемого соленоидом, такого как магнитное поле 44 от соленоида маяка 18 на Фиг.1. С математической точки зрения, рассматриваемый маяк в достаточно хорошем приближении может быть представлен как магнитный диполь. А это означает, что геометрия его магнитного поля подобна геометрии магнитного поля стержневого магнита 170 с силовыми линиями магнитного поля 172, как показано на Фиг.9. Стержневой магнит имеет направление оси m и напряженность поля M. В любой точке пространства Р имеется пространственный вектор R*r c направлением вектора r и модулем R, идущий от стержневого магнита к точке Р. В указанной точке Р имеется вектор электромагнитного поля H*h с направлением вектора h и модулем Н, который измеряется устройством для внутрискважинного каротажа в процессе бурения. Математическая задача заключается в определении пространственного вектора R*r на основании измеренного вектора магнитного поля H*h.
Важным признаком, отраженным на Фиг.9, является то, что три вектора, характеризующие направление m магнитного диполя, вектор направления r от диполя к точке Р и направление магнитного поля h, лежат в одной плоскости, т.е. вектор r лежит в плоскости, образуемой векторами h и m. Таким образом, при условии, что вектора h и m не параллельны друг другу, они определяют плоскость, в которой лежит вектор r. Следствием этого является то, что если точка наблюдения расположена "вблизи" источника, где m и h параллельны, то нельзя определить положение точки наблюдения направо - налево, вверх - вниз для горизонтальных скважин.
Если три модуля вектора M, R и Н заданы как положительные числа, то связанные с ними направления векторов m, r и h являются единственными, как показано на Фиг.9. Имеется однозначное соотношение между направлением вектора h и направлением вектора r на любой "доле силовой линии", такой как доля 1, показанная на Фиг.9. Зная измеренное значение угла Amh электромагнитного поля, можно вывести значение угла Amr радиус-вектора r, проследив траекторию силовой линии поля, проходящей в пространстве от одного конца диполя назад к другому его полюсу, и данная зависимость представлена численно в виде кривой 180 на Фиг.10. Таким образом, измеряя угол между известными направлениями векторов h и m, можно легко получить угол Amr.
Направление и интенсивность поля в двух точках Р и Р1, расположенных диаметрально противоположно по отношению к источнику поля 170, являются одинаковыми. Данные точки лежат на отдельных компланарных долях 1 и 1а силовых линий соответственно. Вначале необходимо знать, какая из этих долей является правильной, для того, чтобы произвести расчет единственного местоположения на основании измерения трех векторных составляющих электромагнитного поля. Применительно к раскрываемым в настоящем описании буровым работам для гравитационного дренажа пласта с использованием пара достаточным условием для расчета является известность того, что точка наблюдения лежит выше источника.
Таким образом, зная направления векторов m и h и также зная то, что точка наблюдения находится в вертикальной проекции выше источника в вертикальной проекции, направление вектора r определяется однозначно. Направление вектора r лежит в плоскости, образованной векторами m и h, а доля силовой линии поля в данной плоскости должна лежать выше источника. Угол Amr от m до r на той доле силовой линии однозначно соотносится с углом Amh, т.е. углом от m до h. Кроме того, соотношение между модулями векторов R, H, М и углом Amr описывается следующим уравнением:
Н=(M/(4*pi*R3))*sqrt(3*(cos(Amr))2+1).
Следовательно, зная М и Н, а также угол Amr, величину R можно без труда определить их вышеуказанного уравнения. Важными моментами, которые следует принять во внимание, является то, что величина поля Н прямо пропорциональна напряженности источника поля М и обратно пропорциональна кубу расстояния R и угловому коэффициенту, принимающему значения 2 и 1, в зависимости от угла Amh. Момент М пропорционален протекающему в обмотке соленоида току, который, в свою очередь, пропорционален напряжению батареи. Поскольку результат измерения будет проинтегрирован по времени в зависимости от длительности возбуждения, то варьирование длительности импульса возбуждения обратно пропорционально протекающему току является компенсирующим фактором и еще дополнительно является способом непосредственного дистанционного контроля состояния батареи.
Вышеуказанные рассуждения подразумевают не только то, что желательно знать направления векторов m и h, но также и то, что желательно знать их ориентацию, то есть "знак" каждого из них. Первоочередной целью измерений в процессе бурения является точное определение азимутального направления ствола скважины и угла бокового наклона прибора, выполняющего измерения в процессе бурения, в каждой точке скважины и также количественное определение указанных параметров в точках, расположенных в скважине с малым шагом друг от друга. Таким образом, несложно определить и осевое направление электромагнитного поля, и его знак. Положение оси источника электромагнитного поля известно, поскольку на момент бурения реперная скважина была объектом геодезических съемок. При создании источника электромагнитного поля и его установке, к примеру, каким образом, что локальное поле, генерируемое при возбуждении источника постоянным током положительной полярности, будет направлено вниз, ось реперной скважины укажет на знак направления поля источника. Как правило, знак поля источника предположительно известен, поскольку точно известна глубина каждой из скважин. Следовательно, буровому мастеру, как правило, известно, лежит ли текущая точка наблюдений "до" либо "после" источника поля. Действительно, зная хронологию буровых работ, буровой мастер непосредственно перед выполнением измерения обычно знает приближенные значения относительных координат электромагнитного маяка. Поэтому во многих случаях нет необходимости в определении знака m.
Вышеприведенные рассуждения показывают, что относительные координаты разбуриваемой скважины и электромагнитного маяка могут быть получены по результатам измерений на каждой буровой площадке. Фактически измерения электромагнитного поля будут производиться всякий раз при нахождении в радиусе действия конкретного электромагнитного маяка. Использование общеизвестных способов анализа информации и массивов данных по результатам измерений при известной протяженности разбуриваемой скважины позволяет выполнять оптимизацию данных по азимутальному направлению ствола скважины и с большей точностью определять относительные координаты двух скважин.
Несмотря на то, что описание настоящего изобретения дается на основании различных вариантов его осуществления, далее станет понятным, что указанные примеры осуществления изобретения согласуются с его сущностью и объемом притязаний, выраженных в прилагаемой формуле изобретения.
Реферат
Изобретение относится к бурению скважин и может быть использовано для контроля расстояния и направления скважины в процессе бурения. Устройство измерения расстояния и определения направления между двумя буровыми скважинами содержит узел соленоида, датчик магнитного поля, электронную схему определения пространственных координат датчика магнитного поля и процессор определения расстояния и направления между первой и второй точками по измеренным пространственным координатам датчика и измеренным векторным составляющим магнитного поля и по заданной величине характеристического магнитного поля соленоида. При этом узел соленоида установлен в первой выбранной точке в первой буровой скважине, имеющей известный угол отклонения от вертикали и известное направление в первой выбранной точке, а датчик магнитного поля расположен во второй выбранной точке во второй скважине и выполнен с возможностью измерения трех векторных составляющих характеристического магнитного поля соленоида во второй точке. Кроме того, устройство содержит скважинную электрическую схему для подачи электрического тока в узел соленоида, устройство для дистанционной подачи пускового сигнала на узел соленоида и электронную схему в узле соленоида, выполненную с возможностью работы в режиме активного ожидания указанного пускового сигнала. Техническим результатом является повышение точности проводки скважины в процессе бурения скважины. 5 н.п. ф-лы, 31 з.п. ф-лы, 10 ил.
Формула
Документы, цитированные в отчёте о поиске
Аппарат для передачи мощности, способ выработки сигнала дистанционного управления внутри трубной конструкции и нефтяная скважина
Комментарии