Способ уборки зерновых культур - RU2659243C1
Код документа: RU2659243C1
Чертежи

Описание
Изобретение относится к области сельского хозяйства и может быть использовано в бескомбайновых технологиях уборки зерновых культур с дозреванием зерна или подсушкой растительной массы на стационаре.
Совершенствование технологий получения товарного зерна требует разработки новых технических решений и способов уборки урожая. В настоящее время интенсификация процесса обмолота достигается за счет повышения пропускной способности молотильного аппарата или за счет снижения удельной доли соломы в обмолачиваемой растительной массе, что также приводит к усложнению конструкции и росту металлоемкости машин.
Современные машины значительно уплотняют плодородный слой почвы, что приводит к снижению плодородия. Часто уборочные машины имеют ограничения при использовании, например после выпавших осадков растительная часть высыхает быстрее, чем почва, комбайны простаивают, что влечет за собой увеличение сроков уборки, а значит - потери урожая.
В настоящее время известно несколько способов и устройств для их реализации, обеспечивающих повышение эффективности уборки урожая.
Известен способ уборки урожая зерновых культур и утилизации незерновой части урожая и устройство для его осуществления по патенту РФ [1]. Способ включает уборку зерновой части урожая очесом на корню. Очесанный стеблестой обрабатывают по всей высоте раствором азотного удобрения, измельчают и вносят в почву одновременно с ее обработкой. Изобретение обеспечивает комплексную технологию уборки зерна и утилизацию незерновой части урожая. Возможность отделения зерновой части культуры при ее последующем обмолоте сокращает затраты энергии на обмолот.
В качестве недостатков данного способа можно отметить необходимость в повышении энергонасыщенности комбайна для выполнения технологических операций по утилизации незерновой части урожая, повышении прочности конструкции комбайна, что неизбежно приведет к ее усложнению и увеличению массы. К тому же повышенная масса комбайна негативно скажется на плодородии почв вследствие ее уплотнения, а использование данного устройства на полях со сложным рельефом и большим уклоном местности затруднительно.
Существует способ уборки зерновых культур [2], включающий скашивание убираемой культуры на двух уровнях с получением колосовой и стеблевой частей, обмолот колосовой части и очистку зерна от длинных примесей, которые брикетируют и собирают в контейнер. Стеблевую часть собирают и укладывают в валок одновременно с обмолотом, очисткой и брикетированием. Комбайн имеет жатку с двухъярусным режущим аппаратом, молотильный аппарат и очистку в виде цилиндрического решета. Под очисткой эквидистантно установлена выполненная в виде полуцилиндра скатная доска. Под брикетировщиком длинных примесей установлен контейнер для брикетов. Для сбора очищенного зерна имеется выполненный из двух частей бункер. Между двумя режущими аппаратами расположена труба с вентилятором и валкообразующим устройством, установленным между колесами комбайна.
Несмотря на достоинства способа, он имеет существенные недостатки: подобная схема разделения частей зерновой культуры требует значительного усложнения конструкции как жатки, так и комбайна в целом, к тому же, сохраненная мощность энергетической установки за счет отсутствия необходимости воздействовать молотильным устройством на неколосовую часть, расходуется на брикетирование и сбор в контейнер длинных примесей,
Наиболее близким по технической сущности предлагаемого способа является способ уборки зерновых культур [3], взятый за прототип, реализация которого осуществляется следующим образом: срезанные растения укладывают с двух сторон с перекрытием колосовой части в центре валка, равным двойной длине колоса, и прессуют с обвязкой в призматический тюк. Вырезают среднюю колосовую часть тюка и транспортируют на стационар для обмолота. Непрерывный поток тюков в молотильное устройство после сушки обеспечивает питатель-дозатор. Неколосовую часть растений разбрасывают по полю или транспортируют на корм животным. Интенсификация процесса обмолота обеспечивается за счет снижения удельной доли соломы в обмалачиваемой растительной массе.
Недостатками данного способа являются сложность технологической схемы жатки, что повышает трудоемкость ее технического обслуживания и ремонта, а также необходимость осуществления транспортных работ заполненного накопителя, усложняющую технологию уборки зерновых.
Общим недостатком указанных способов является отсутствие возможности обмолота зерновых культур в условиях переувлажненности почв, на участках полей с большим уклоном и сложным рельефом местности, а также значительное силовое воздействие на почву, приводящее к ее переуплотнению.
Принципиально новым направлением в растениеводстве является использование беспилотных летательных аппаратов (БПЛА) [4]. Однако уровень использования БПЛА в современных технологиях возделывания зерновых культур ограничивается контролем и мониторингом состояния посевов и хода уборки урожая.
Техническая задача - интенсификация процесса уборки зерновых культур и минимизация потерь урожая за счет создания технической возможности сбора зерновой части индивидуально для каждого растения и проведения работ в условиях переувлажненности почв и на полях со сложным рельефом местности.
Поставленная задача достигается тем, что электронными средствами определяют оптимальную длину колосовой части, позиционируют режущий аппарат относительно каждого растения индивидуально и осуществляют срез колоса, складируют его в накопитель беспилотного аппарата и по воздуху доставляют к месту обмолота и хранения, а неколосовую часть растения скашивают также индивидуально, позиционируя режущий аппарат относительно каждого растения и поверхности поля для обеспечения заданной длины стерни. Таким образом, возможно создать способ уборки зерновых, приводящий к достижению результата в сложных природно-климатических условиях и независимо от рельефа местности с минимальными потерями урожая.
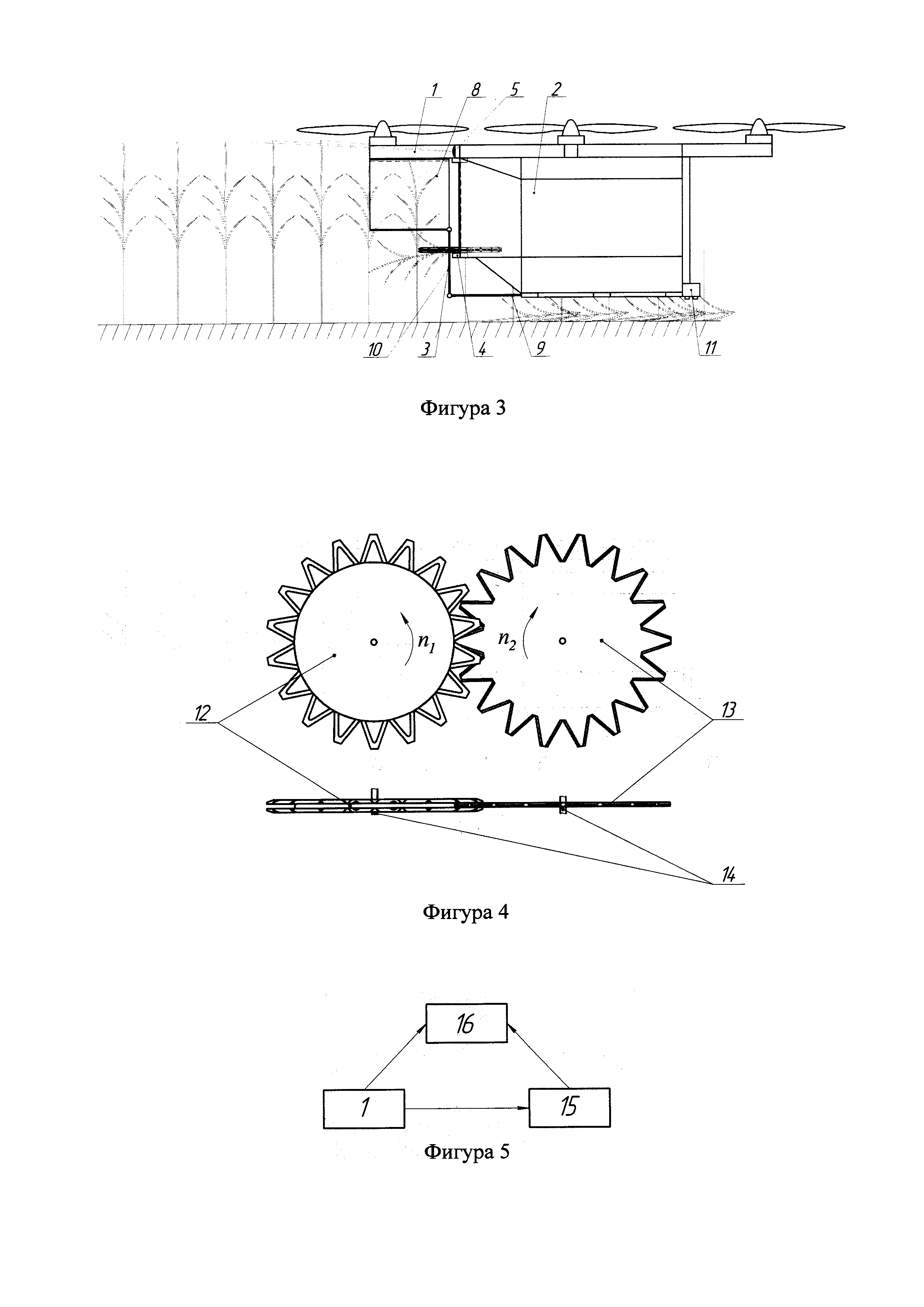
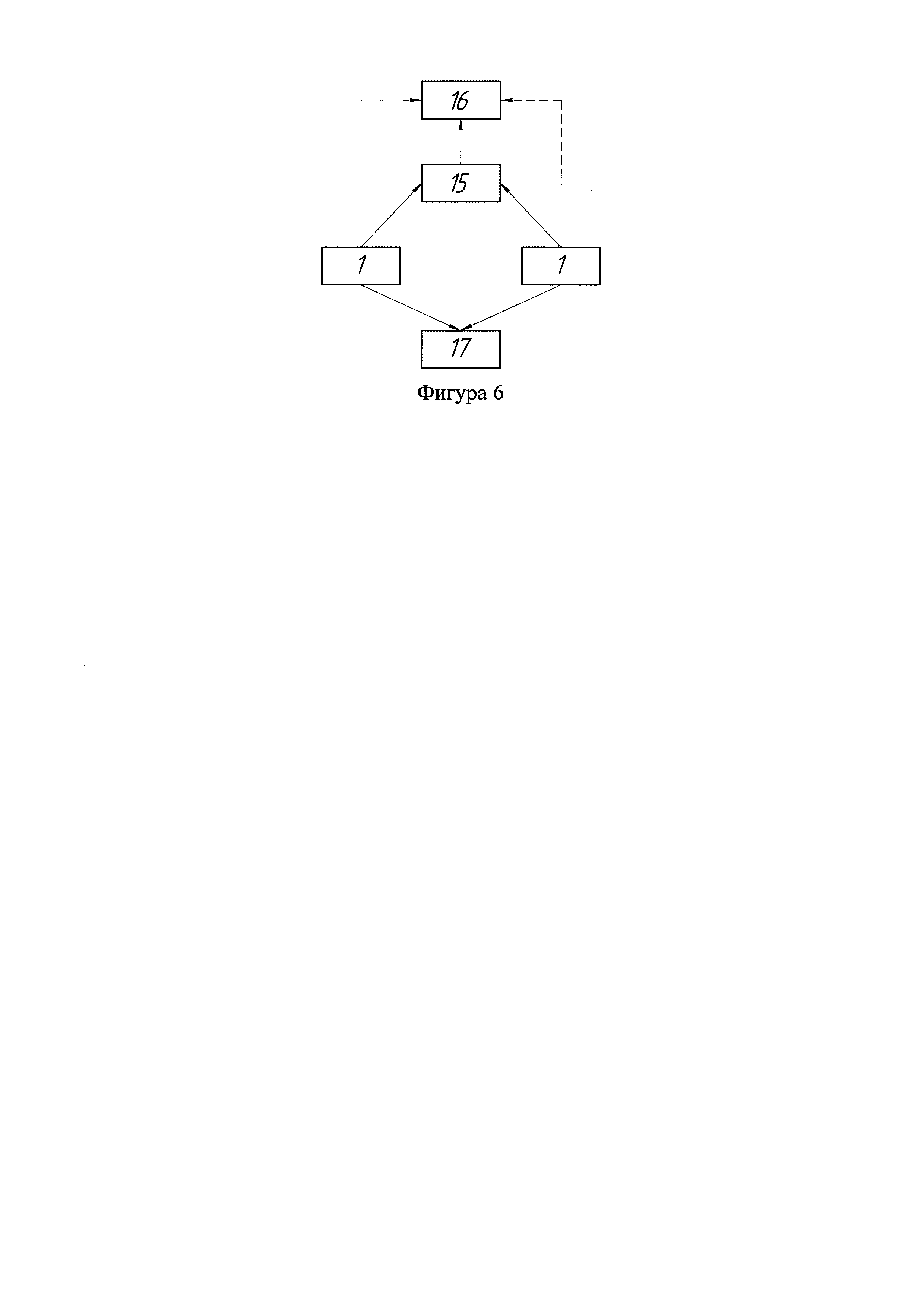
На фиг. 1 представлен общий вид БПЛА с бункером и режущим аппаратом; на фиг. 2 - схема сбора колосовой части зерновых культур; на фиг. 3 - схема скашивания не колосовой части зерновых культур; на фиг. 4 - общий вид режущего аппарата; на фиг. 5 - блок-схема уборки зерновых БПЛА; 6 - блок-схема уборки зерновых группой БПЛА.
Практически предложенный способ может быть реализован следующим образом.
На беспилотный летательный аппарат 1 устанавливается накопитель 2 для сбора зерновой части растений, срез которой осуществляется режущим аппаратом 3, имеющим привод 4 от трансмиссии БПЛА. Позиционирование конструкции относительно расположения колосовой части зерновых культур происходит при помощи датчиков 5, например электронно-оптических, связанных непосредственно с бортовым компьютером (не указан) беспилотного летательного аппарата. Для разгрузки накопителя 2 предусмотрен люк, состоящий из двух створок 6, шарнирно прикрепленных к бункеру. Фиксация створок происходит при помощи магнитного замка 7, управляемым бортовым компьютером БПЛА. Для предотвращения воздействия ветровой нагрузки от двигателей на срезаемую колосовую часть предусмотрены ветровые щиты 8, прикрепленные шарнирно к основанию БПЛА с одной стороны и через опоры 9, жестко прикрепленные к створкам 6 и рычаги 10, с другой стороны. Подача электрической энергии для заряда аккумуляторной батареи БПЛА происходит при помощи штепсельного разъема 11.
Режущий аппарат 3 состоит из двух зубчатых дисков - двойного 12 и одинарного 13, расположенных на приводных валах 14 таким образом, что зубья одинарного диска полностью входят в канавку двойного, при этом вращение дисков происходит в противоположные стороны с одинаковой частотой, тем самым обеспечивая гарантированный срез колосовой части растений и ее подачи в бункер.
Предлагаемый способ уборки зерновых культур осуществляется следующим образом.
Движущийся над поверхностью поля БПЛА 1 по заданной программе вдоль направления сева при помощи датчиков 5 и бортового компьютера определяет оптимальную длину колосовой части и, соответственно, высоту среза, позиционирует режущий аппарат 3 относительно каждого растения индивидуально, осуществляет срез колоса и складирует его в накопитель 2. После заполнения накопителя 2 колосовая часть растений по воздуху доставляется на пункт обмолота 15 или пункт хранения 16.
Разгрузка накопителя 2 осуществляется путем открытия сворок 6 люка и магнитного замка 7. При этом створки 6 через опоры 9 и рычаги 10 воздействуют на ветровые щиты 8, уменьшая угол их наклона. Закрытие створок 6 люка осуществляется под воздействием силы воздушного потока (Fw) двигателей БПЛА, возрастающей во время набора высоты и скорости при движении к месту сбора зерновой части культуры и действующей на ветровые щиты 8, опоры 9 и рычаги 10.
На пункте обмолота 15 колосовая часть подвергается обработке и, при необходимости, сушке. В пункте хранения 16 колосовая часть складируется для дозревания зерна или обеспечения равномерной загрузки пункта обмолота.
Скашивание незерновой части растений происходит следующим образом. Движущийся над поверхностью поля БПЛА 1 определяет индивидуально высоту среза каждого растения относительно поверхности поля при помощи датчиков 5 и бортового компьютера, позиционирует режущий аппарат относительно каждого растения и поверхности поля и производит скашивание. Срезанные растения поступают в накопитель или распределяются по полям, минуя накопитель. Во втором случае неколосовая часть растений может быть собрана известными средствами механизации на корм животным в благоприятных природно-климатических условиях.
Сбор зерновых группой БПЛА осуществляется следующим образом.
Группа БПЛА 1, оснащенных бункерами с режущими аппаратами, проводят сбор зерновой части растений по заранее заданной программе. Количество БПЛА определяется исходя из размеров поля и урожайности культуры. Корректирование позиционирования БПЛА на поле происходит за счет передвижного пункта управления 17, включающего в себя и станцию заряда аккумуляторных батарей беспилотных летательных аппаратов. Собранную зерновую часть растений в накопителях 2 БПЛА доставляет на пункт обмолота 15 или пункт хранения 16, где осуществляют разгрузку. В дальнейшем цикл повторяется.
При необходимости заряда аккумуляторных батарей, БПЛА 1 прибывает на станцию заряда передвижного пункта управления 17 и садится на специально подготовленную площадку, обеспечивая подвод электрической энергии через штепсельный разъем 11. Количество площадок станции заряда аккумуляторных батарей передвижного пункта управления 17 определяется исходя из количества БПЛА, находящихся в работе.
Предложенный способ уборки зерновых культур обеспечит бесперебойность технологического процесса в условиях повышенной влажности почв и на полях со сложным рельефом местности с минимальными потерями урожая.
Список источников информации
1. Пат. РФ №2307498, МПК A01D 91/04, A01D 41/08. Способ уборки урожая зерновых культур и утилизации незерновой части урожая и устройство для его осуществления / Г.Г. Маслов, Е.И. Трубилин, В.В. Абаев, С.М. Сидоренко. - №2006103469/12; заявл. 06.02.2006, опубл. 10.10.2007 г., Бюл. №18.
2. Пат. РФ №2271649, МПК A01D 91/04, A01D 41/00. Способ уборки зерновых культур и устройство для его осуществления / Л.Н. Бурков. - №2004124472/12; заявл. 10.08.2004, опубл. 20.03.2006, Бюл. №8.
3. Пат. РФ №2176441, МПК A01D 91/04. Способ уборки зерновых культур / Ю.А. Гуськов, А.В. Шинделов, И.В. Тихонкин, Е.М. Марущенко. - №2000114325/13; заявл. 05.06.2000, опубл. 10.12.2001, Бюл. №34.
4. Авдеев П.И. Использование беспилотных летательных аппаратов для сельского хозяйства / Современные тенденции развития науки и технологий. - Белгород: И.П. Ткачева Е.П., 2016. - №11, ч. III. - С. 6-8.
Реферат
Изобретение относится к области сельского хозяйства и может быть использовано в бескомбайновых технологиях уборки зерновых культур с дозреванием зерна или подсушкой растительной массы на стационаре. Поставленная задача достигается тем, что электронными средствами определяют оптимальную длину колосовой части, позиционируют режущий аппарат относительно каждого растения индивидуально и осуществляют срез колоса, складируют его в накопитель беспилотного аппарата и по воздуху доставляют к месту обмолота и хранения, а неколосовую часть растения скашивают также индивидуально, позиционируя режущий аппарат относительно каждого растения и поверхности поля для обеспечения заданной длины стерни. Таким образом, возможно создать способ уборки зерновых, приводящий к достижению результата в сложных природно-климатических условий и независимо от рельефа местности с минимальными потерями урожая. Техническая задача - интенсификация процесса уборки зерновых культур и минимизация потерь урожая за счет создания технической возможности сбора зерновой части индивидуально для каждого растения и проведения работ в условиях переувлажненных почв и на полях со сложным рельефом местности.
Комментарии