Способ и система управления перемещением штока в системе откачки флюида из скважины - RU2381384C1
Код документа: RU2381384C1
Чертежи





Описание
Область применения изобретения
Настоящее изобретение в общем имеет отношение к созданию способов и систем для обеспечения максимальной откачки флюида из скважины с использованием системы откачки с насосными штангами, а более конкретно к созданию способов и систем для обеспечения максимальной добычи флюида за счет оптимизации скорости первичного двигателя насосной штанги.
Предпосылки к созданию изобретения
Возвратно-поступательными нефтяными насосами традиционно управляют при помощи станка-качалки с балансирным уравновешиванием, с синусоидальными характеристиками возвратно-поступательного движения полированного штока станка-качалки, что диктуется постоянной скоростью электрического или газового первичного двигателя и геометрией станка-качалки с балансирным уравновешиванием. Обычно используют постоянную скорость кривошипа при работе станка-качалки с балансирным уравновешиванием. В результате геометрия станка-качалки с балансирным уравновешиванием диктует скорость насосной штанги, следующую по кривой, которая является синусоидальной по своей природе. Другие типы блоков откачки, такие как блоки откачки с длинным ходом или с гидравлическим управлением, работают на первой постоянной скорости полированного штока во время хода вверх и на второй постоянной скорости во время хода вниз, с дополнительным изменением скорости только во время смены направления движения. В некоторых блоках откачки используют переменное управление первичными двигателями для облегчения изменения постоянной скорости первичного двигателя или для обеспечения возможности выбора переменной скорости первичного двигателя на любом желательном участке цикла откачки.
Обычная система откачки с насосными штангами содержит поверхностное оборудование (станок-качалка с балансирным уравновешиванием или качалка упрощенного типа для глубинных насосов, работающих от группового привода), и скважинное оборудование (насосная штанга и насос), которое работает в стволе скважины, пробуренном в нефтяной пласт. Взаимодействие подвижных и стационарных элементов скважины и динамическое взаимодействие с флюидами, присутствующими в скважине, создает сложную механическую систему, которая требует точной разработки и управления, чтобы быть способной работать эффективным образом.
Для повышения добычи нефти необходимо провести анализ и оптимизацию всех элементов системы откачки с использованием насосных штанг. Проектирование системы оборудования нефтяной скважины обычно осуществляют на основании законов механики и специальных методик, причем требуется использовать определенные установленные аналитические стандарты для создания удачного проекта и желательной работы нефтяной скважины. Такой анализ обычно включает в себя:
1. Динамический анализ системы насосных штанг, когда производят расчет динамических сил и напряжений, воздействующих на насосную штангу (динамическое волновое уравнение);
2. Кинетический анализ поверхностного оборудования (блок откачки);
3. Анализ производительности погружного насоса (программа для оценки скважины); и
4. Анализ производительности нефтяного пласта (связь с характеристиками притока).
Такой уже известный системный анализ обеспечивает правильную и полезную информацию относительно первичного проектирования скважины и ее производительности, но только для постоянной скорости первичного двигателя. Известные ранее попытки повышения дебита скважины предусматривали изменение компонентов колонны насосных штанг и размера насоса, изменение полной скорости вращения кривошипа, регулирование скорости в течение хода за счет выбора различных постоянных скоростей кривошипа для хода вверх и хода вниз при помощи привода с регулируемой скоростью или за счет использования электродвигателей со сверхвысоким скольжением, чтобы замедлять скорость первичного двигателя во время периодов пикового вращающего момента в течение одного хода. Уже известно, что можно при необходимости производить изменение скорости первичного двигателя для управления режимами откачки (патенты США № 4,490,094; 4,973,226 и 5,252,031; последний основан на расчете характеристик погружного насоса, приведенном первоначально в патенте США № 3,343,409), при ограничении нагрузки на колонне насосных штанг, соединяющей поверхностный блок с возвратно-поступательным насосом и другими компонентами (патенты США № 4,102,394 и 5,246,076; РСТ публикация WO 03/048578), причем также известна оптимизация режимов откачки блока откачки (патенты США № 4,102,394 и 4,490,094) или преобразование характеристики синусоидальной скорости полированного штока, управляемого при помощи станка-качалки с балансирным уравновешиванием, в линейную характеристику в течение большинства ходов вверх и ходов вниз (патент США № 6,890,156), чтобы имитировать длинный ход типичной качалки упрощенного типа.
Большинство известных ранее методик и систем основано на различных анализах нагрузок или энергии полированного штока и на косвенном обнаружении различных проблем, связанных с режимом работы насоса или притоком флюида в скважину. В патенте США № 4,102,394, например, предлагается производить установку другой постоянной скорости первичного двигателя во время хода вверх, отличающейся от скорости во время хода вниз, чтобы согласовать приток нефти из пласта и избежать режимов пустой откачки. Способ, предложенный в патенте США № 4,490,094, определяет и модифицирует мгновенную скорость первичного двигателя для заданного участка хода полированного штока, на основании выходной мощности и работы первичного двигателя. В РСТ публикации WO 03/048578 описано применение конечных изменений для скорости первичного двигателя в течение одного хода, чтобы ограничивать воздействие нагрузки на полированный шток внутри предварительно заданных безопасных пределов. В патенте США № 6,890,156 описано применение конечных изменений для скорости первичного двигателя, так что скорость полированного штока, который совершает возвратно-поступательное движение при помощи станка-качалки с балансирным уравновешиванием, остается постоянной в течение расширенного периода в течение хода вверх и хода вниз. Изменения скорости диктуются геометрией станка-качалки с балансирным уравновешиванием и приводят к уменьшению времени хода при той же самой максимальной скорости полированного штока. Нет связи с эффективным ходом насоса и отсутствует воздействие на эффективный ход насоса, не принимается во внимание или преднамеренно не изменяется максимальная или минимальная сила, действующая в колонне насосных штанг.
Вот уже в течение десяти лет различные поставщики предлагают приводы с регулируемой скоростью (VFD) для станков-качалок с балансирным уравновешиванием, что дает возможность изменения скорости кривошипа и полированного штока в течение одного хода насоса. Некоторые из устройств, такие как еРАС Vector Flux Drive фирмы eProduction Solutions или Sucker-Rod Pump Drive фирмы Unico, Inc., позволяют пользователю задавать переменную скорость кривошипа и полированного штока в течение одного хода при помощи встроенного программируемого логического контроллера и используемого в промышленности цепного языка программирования.
В известных ранее решениях, скорость полированного штока изменяли для того, чтобы улучшить, но не оптимизировать определенные аспекты работы насоса, например, снизить нагрузки в колонне насосных штанг, или же такие решения были сфокусированы скорее на кинематике системы откачки и предписывали определенные перемещения полированного штока, без анализа динамики всей системы, содержащей поверхностный блок, колонну насосных штанг и погружной насос.
До настоящего времени, процесс оптимизации применяли только на фазе проектирования, где, на основании требований к системе и динамического анализа всей системы откачки, определяли физические параметры системы (такие как мощность двигателя, материалы и размеры колонны насосных штанг и т.п.), чтобы получить требуемый дебит и не превысить предельные нагрузки, приложенные к системе. Однако такая оптимизация при проектировании предполагает использование постоянной скорости первичного двигателя.
При попытках улучшения конструкции новой системы откачки или улучшения работы существующей системы, не было попыток оптимизировать ее характеристики за счет оптимизации периода хода и за счет изменения скорости первичного двигателя в течение хода. Однако внедрение такого подхода дает возможность создания способа и системы, которые не только соответствуют высоко нелинейной природе проблемы оптимизации добычи нефти, но одновременно позволяют снизить эксплуатационные расходы и обеспечить работу с безопасными коэффициентами загрузки.
Сущность изобретения
В соответствии с настоящим изобретением предлагается способ и система для оптимизации скорости первичного двигателя штангового насоса для максимального повышения добычи нефти, при одновременном снижении эксплуатационных расходов и обеспечении работы с безопасными коэффициентами загрузки. Оптимизация может быть проведена для существующих систем откачки, а также на стадии разработки новой системы. Предложенные способ и система оптимизации сфокусированы на отыскании и применении оптимальной переменной скорости первичного двигателя. Однако следует иметь в виду, что полученная оптимальная угловая скорость первичного двигателя определяет оптимальную линейную скорость полированного штока, поэтому - после незначительных изменений, знакомых специалистам в данной области - предложенный способ может быть также использован для оптимизации скорости полированного штока вместо угловой скорости первичного двигателя.
Настоящее изобретение позволяет также автоматически контролировать, анализировать, проверять, оптимизировать и управлять данной скважиной из удаленного центрального положения. Предложенная система позволяет выполнять кинетический и динамический анализ оборудования нефтяной скважины и использовать различные экспериментальные данные и математическое моделирование для оптимизации производительности скважины. Дополнительные преимущества включают в себя текущий контроль режимов откачки и обнаружение необычных, ухудшенных или вредных режимов работы, и изменение параметров откачки в ответ на обнаруженные изменения.
В соответствии с первым аспектом настоящего изобретения, предлагается способ управления угловой скоростью первичного двигателя и перемещением полированного штока в системе откачки, причем указанный способ включает в себя следующие операции:
a) разработка математической модели системы откачки на основании системных данных;
b) измерение физических режимов системы откачки во время работы;
c) сравнение математической модели и измеренных физических режимов;
d) расчет оптимальной переменной скорости первичного двигателя и новых рабочих параметров для определения оптимального перемещения полированного штока, насосной штанги и погружного насоса; и
е) применение оптимальной переменной скорости первичного двигателя и новых рабочих параметров в системе откачки.
В соответствии со вторым аспектом настоящего изобретения, предлагается система управления перемещением полированного штока в системе откачки, причем перемещение полированного штока создают при помощи первичного двигателя, при этом указанная система содержит:
a) поверхностные компоненты откачки, в том числе первичный двигатель;
b) контроллер для управления первичным двигателем, причем указанный контроллер позволяет производить динамические изменения скорости, ускорения и вращающего момента в течение одного цикла;
c) скважинные компоненты откачки, в том числе колонну насосных штанг и погружной насос;
d) средства передачи движения первичного двигателя к скважинным компонентам откачки;
e) средства измерения в поверхностных компонентах откачки, предназначенные для контроля рабочих режимов;
f) местный блок управления;
g) средство передачи сигналов, предназначенное для передачи сигналов от средств измерения и контроллера к местному блоку управления, для определения оптимальной скорости первичного двигателя и требуемых новых рабочих параметров первичного двигателя; и
h) средство передачи новых рабочих параметров на контроллер.
В соответствии с предпочтительными вариантами способа в соответствии с настоящим изобретением, оптимальную переменную скорость первичного двигателя определяют (задают) так, что длина хода насоса становится максимальной, время хода становится минимальным, силы, действующие на компоненты системы откачки, становятся минимальными, и потребление энергии становится минимальным. Преимущественно, расчет новых рабочих параметров содержит анализ геометрии и механических характеристик системы откачки, причем, когда первичный двигатель создает перемещение полированного штока (и когда используют новые рабочие параметры первичного двигателя для достижения оптимального перемещения полированного штока), тогда первичный двигатель получает новые рабочие параметры за счет регулирования скорости, ускорения и вращающего момента первичного двигателя. Когда система откачки представляет собой систему откачки с гидравлическим управлением, новые рабочие параметры системы откачки преимущественно задают за счет регулирования давления и расхода в системе управления системой откачки. Оптимальная переменная скорость первичного двигателя может быть достигнута за счет способа оптимизации, выбранного из группы, в которую входят теоретические способы, экспериментальные способы и комбинация теоретических и экспериментальных способов, причем указанные способы известны специалистам в данной области, при этом расчет оптимальной переменной скорости первичного двигателя может быть выполнен как часть начального проектирования системы откачки, с использованием способа анализа с прогнозированием (без измерения физических режимов системы откачки).
В соответствии с предпочтительными вариантами системы в соответствии с настоящим изобретением, используют средства измерения для измерения нагрузки полированного штока, положения балансира, давления в лифтовой колонне и давления в обсадной колонне, причем указанные средства измерения преимущественно содержат преобразователь для измерения нагрузки полированного штока, оптический датчик положения для измерения положения балансира и датчики давления для измерения давления в лифтовой колонне и давления в обсадной колонне. Контроллер может содержать динамический тормозной резистор либо регенеративный модуль, однако ни тот ни другой не являются обязательными. Система преимущественно содержит дистанционную вычислительную станцию, имеющую связь с местным блоком управления. Местный блок управления преимущественно содержит программу математического моделирования и различные средства принятия решения, для анализа сигналов, определения оптимальной скорости первичного двигателя и определения требуемых новых рабочих параметров первичного двигателя.
В соответствии с некоторыми предпочтительными вариантами настоящего изобретения, система откачки позволяет регулировать линейную скорость полированного штока в соответствии с программируемой или самоприспосабливающейся функцией одной из следующих переменных: время, положение полированного штока или угол поворота кривошипа. В соответствии с этими предпочтительными вариантами настоящего изобретения используют VFD для регулирования угловой скорости первичного двигателя, что позволяет получить оптимальную переменную линейную скорость полированного штока.
Наиболее эффективным является предположение, что профилем угловой скорости первичного двигателя можно управлять при помощи функции Ω(s) положения полированного штока, однако эта функция может быть также определена как функция Ω(t) времени или функция Ω(α) угла кривошипа. Положение s ε (0,s0) полированного штока определяют для всего цикла, который включает в себя ход вверх и ход вниз, и поэтому so соответствует двойной длине хода полированного штока. В соответствии с настоящим изобретением предлагаются способ и система для оптимизации профиля угловой скорости Ω первичного двигателя для цикла всего хода, чтобы решить одну из следующих задач:
(I) максимальное повышение добычи нефти; или
(II) достижение заданного дебита с использованием минимального потребления энергии в блоке откачки, однако при удовлетворении следующих ограничений в течение всего периода Т хода:
(А) максимальное и минимальное напряжения в любой точке х ε (0,L) вдоль всей длины L колонны насосных штанг не превышают предельных значений, допускаемых в соответствии с модифицированной схемой Гудмана:


в которой g(σmin(x)) зависит от свойств материала сегмента штанги в точке х;
(В) изменения скорости двигателя, достижимые для данного блока откачки, то есть вращающий момент M(Ω, s) не превышают допустимый предел (Mmin, Mmax), заданный для двигателя и редуктора:


где Mmin<0 представляет собой минимально допустимый отрицательный вращающий момент (который может быть равен нулю, чтобы снизить до минимума регенеративный вращающий момент),
причем угловая скорость двигателя не превышает заданное предельное значение:
Ω(s)<Ωmax для s ε (0,s0)
(С) угловая скорость Ω(s) одинакова в начале и конце хода за счет циклической характеристики операции откачки:
Ω(0)=Ω(s0)
За счет внутренней временной задержки угловой скорости двигателя относительно входного сигнала от VFD, полученная скорость двигателя не соответствует входной проектной скорости, а поэтому более эффективным является прямая оптимизация входной скорости, чем нахождение сначала оптимальной скорости двигателя, а затем попытка определения входной функции, которая в действительности создает требуемую скорость двигателя. Следовательно, функция Ω(s) описывает скорее оптимальную проектную входную скорость для VFD контроллера, чем фактическую оптимальную скорость двигателя. Следует иметь в виду, что эффект оптимизации входной скорости VFD эквивалентен управлению скоростью полированного штока, чтобы оптимизировать производительность и работу насоса.
Было замечено, что оптимальное решение, которое максимально повышает дебит, дополнительно создает следующие преимущества:
- Потребление энергии и максимальные напряжения во всей насосной системе меньше для профиля оптимальной скорости Ω(s), чем для движения в том же периоде цикла при постоянной скорости двигателя, равной средней скорости двигателя в цикле переменной скорости.
- Когда используют оптимизацию энергии для достижения искомого дебита, напряжения снижаются по сравнению с движением во время этого же периода цикла при постоянной скорости двигателя.
После определения оптимальной входной скорости VFD, дальнейшее снижение вращающего момента и энергии двигателя получают за счет подстройки веса кривошипа к новым режимам работы.
Когда проводят оптимизацию не для существующей системы откачки, а во время фазы проектирования, тогда проект может быть дополнительно улучшен на основании требований к мощности и нагрузке, полученных с использованием скорости первичного двигателя, определенной при помощи процесса оптимизации. Изменения проекта для улучшения характеристик системы, приводимой в движение при помощи первичного двигателя с оптимальной переменной скоростью, например, увеличение диаметра самых слабых сегментов колонны насосных штанг позволяет дополнительно улучшить эксплуатационные параметры системы, если применять многократно процессы оптимизации проекта системы откачки и скорости первичного двигателя.
Следует иметь в виду, что оптимальная скорость первичного двигателя и полученная скорость полированного штока, определенные в соответствии с настоящим изобретением, отличаются от предписанных в известных ранее решениях. Например, в патенте США № 6,890,156 описано регулирование скорости первичного двигателя для получения постоянной скорости полированного штока во время большей части длины хода (что не обязательно оптимизирует дебит и снижает нагрузки), в то время как оптимальное перемещение полированного штока, полученное в соответствии с настоящим изобретением, обычно не является постоянным.
Для преодоления ограничений известного уровня техники, в соответствии с настоящим изобретением производят анализ текущих характеристик и соответствующий расчет и применяют наиболее предпочтительную переменную скорость первичного двигателя, чтобы максимально повысить добычу флюида с использованием существующей системы откачки с насосными штангами. В некоторых известных ранее системах требуется изменять компоненты системы, чтобы получить любое увеличение объема добычи, так как в противном случае ухудшаются режимы безопасности при попытке увеличения постоянной скорости первичного двигателя. Эксплуатационные расходы также возрастают, так как приходится использовать более крупные компоненты и увеличивать потребление энергии.
Как и в известных ранее решениях, измерения поверхностной динамограммы дают перемещение полированного штока и усилие в полированном штоке, которые позволяют произвести расчет следующих величин, которые являются важными с точки зрения оптимизации:
- усилия и напряжения во всей колонне насосных штанг, которые используют для проверки условия (А) процесса оптимизации;
- эффективная длина хода плунжера, которую используют для оценки выходного дебита нефти, который необходимо максимально увеличить в соответствии с проблемой (I) оптимизации или который необходимо установить равным заданному дебиту в соответствии с проблемой (II) оптимизации.
Измерения вращающего момента двигателя создают средства управления условием (В) процесса оптимизации. Измерения угловой скорости могут быть использованы для моделирования задержки между входной скоростью VFD и профилем фактической скорости двигателя, если математическое моделирование используют вместо физических измерений для нахождения отклика системы насос/скважина на данную входную скорость VFD. Расчеты длины хода плунжера и напряжений в колонне насосных штанг на основании измерений поверхностной динамограммы осуществляют с использованием методов, описанных в литературе, в которых используют способ конечных разностей или преобразования Фурье (см., например, патент США № 3,343,409). Расчеты длины хода плунжера и напряжений в колонне насосных штанг, а также нагрузок на поверхностный блок, в том числе вращающего момента двигателя, альтернативно могут быть проведены без использования измерений поверхностной динамограммы, а именно за счет моделирования отклика колонны насосных штанг на налагаемое движение полированного штока, с использованием усовершенствованного анализа с прогнозированием, основанного на оригинальной работе Гиббса (S.G.Gibbs, "Predicting Behaviour of Sucker-Rod Pumping System", Journal of Petroleum Technology (SPE 588. July 1963). Этот подход может давать менее точные результаты, однако он является необходимым, если физические испытания не могут быть проведены или результаты измерений не могут быть накоплены, например, на фазе проектирования, или если число испытаний необходимо ограничить, чтобы снизить до минимума перерывы дебита скважины.
Настоящее изобретение направлено на такое управление скоростью первичного двигателя, при котором полированный шток движется так, что погружной насос совершает возвратно-поступательное движение в любой длине хода, которое требуется для максимального повышения дебита, при усталостных нагрузках в насосной штанге ниже предельно допустимых. Кроме того, можно задавать любую желательную скорость погружного насоса и соответствующие режимы его работы, чтобы исключить чрезмерное трение, газовые пробки или другие вредные режимы в скважине.
Указанные ранее и другие характеристики изобретения будут более ясны из последующего детального описания, данного в качестве примера, не имеющего ограничительного характера и приведенного со ссылкой на сопроводительные чертежи.
Краткое описание чертежей
На фиг.1 схематично показана система в соответствии с настоящим изобретением.
На фиг.2а и 2b показана схема последовательности операций, поясняющая предпочтительный процесс для использования в разработке программного обеспечения для варианта в соответствии с настоящим изобретением.
На фиг.3 показан график угловой скорости первичного двигателя до и после оптимизации.
На фиг.4 показан график линейной скорости полированного штока до и после оптимизации.
На фиг.5 показан график усилий полированного штока и усилий плунжерного насоса относительно перемещения во время работы насоса с постоянной скоростью первичного двигателя и с оптимизированной скоростью первичного двигателя.
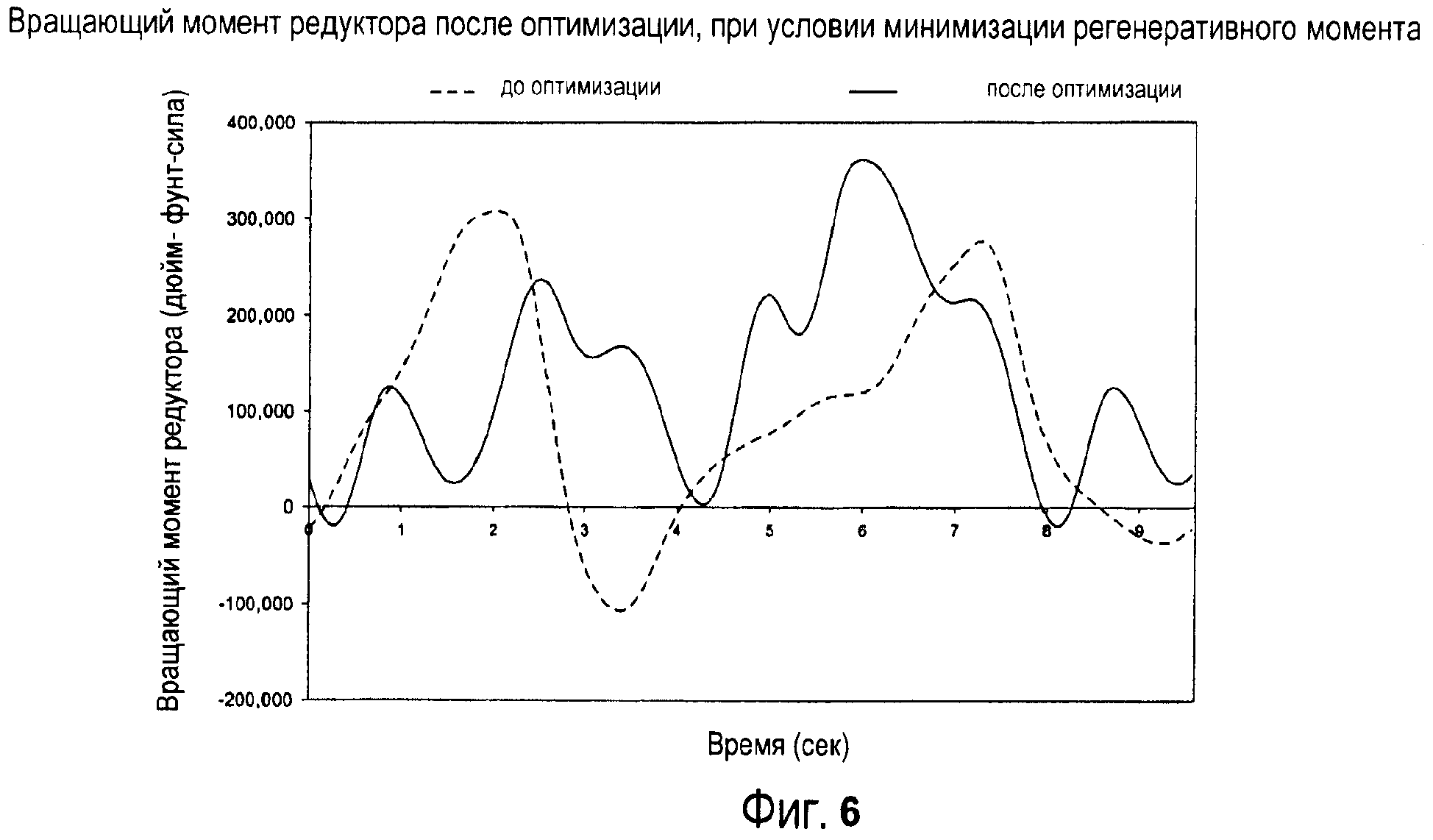
На фиг.6 показан график вращающего момента редуктора до и после оптимизации, причем условием оптимизации является снижение до минимума регенеративного вращающего момента, действующего в редукторе.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Метод оптимизации
Обратимся сначала к приведенному выше краткому изложению изобретения, в котором проблема (1) оптимизации определена как нахождение профиля входной угловой скорости Ω(s) VFD, который максимально увеличивает средний объем флюида, откачиваемого в единицу времени. Объем, откачиваемый во время одного хода за счет налагаемой входной скорости Ω(s) VFD, равен:
Vol(Ω)=АρηUρ(Ω)
где Аρ - площадь поперечного сечения плунжера,
η - коэффициент эффективности откачки,
Uρ(Ω) - длина хода плунжера (произведение ηUρ называют эффективной длиной хода).
Следовательно, задача оптимизации, которая заключается в обеспечении максимального дебита в единицу времени, может быть математически определена как нахождение профиля Ω(s) входной скорости VFD, который доводит до максимума функционал V(Ω), но при удовлетворении ограничений (А-С):

где T(Ω) представляет собой период хода, полученный при применении входной скорости Ω(s).
Аналогично проблема (II) оптимизации может быть определена как нахождение профиля Ω(s) входной скорости VFD, который доводит до минимума потребляемую мощность P(Ω) двигателя, но при удовлетворении ограничений (А-С), вместе со следующим дополнительным ограничением:

в котором V0 представляет собой искомый дебит.
Потребляемая мощность P(Ω) может быть измерена непосредственно при помощи VFD или может быть рассчитана как работа, выполненная при помощи двигателя в единицу времени, поэтому необходимо минимизировать следующий функционал:

где w(Ω) представляет собой работу, выполненную при помощи положительного вращающего момента двигателя в течение одного хода

где: W(Ω,t) представляет собой угловую скорость двигателя в функции времени;

M+(Ω,t) представляет собой положительный вращающий момент двигателя, определенный как:

Для решения указанных выше проблем оптимизации, то есть проблемы (I) с ограничениями (А-С) или проблемы (II) с ограничениями (A-D), необходимо получить следующую информацию в ответ на любую входную скорость Ω(s):
- величина дебита V(Ω) или, что эквивалентно, длина Up(Ω) хода плунжера и период T(Ω) хода;
- распределение σ(Ω,x,t) напряжений для всей колонны насосных штанг x ε(0,L) и периода t ε (0, Т0) хода, и на основании этого получить σmin(Ω,x) и σmax(Ω,x), которые определены в условии (А);
- вращающий момент М (Ω,s) двигателя для всей длины хода s ε (0,s0), и на основании этого получить Mmin(Ω) и Mmax(Ω, которые определены в условии (В);
- потребляемая мощность P(Ω) первичного двигателя, или, что эквивалентно, работа W(Ω) или период T(Ω) хода.
Указанная информация для данной входной скорости Ω(s) может быть получена различными путями, начиная от полностью экспериментальных и кончая чисто теоретическими. Как правило, экспериментальные методы являются более точными, однако они требуют больше усилий при наладке средств измерения, проведении испытаний и сборе данных для каждой входной функции Ω(s). Обычно наиболее эффективным подходом является комбинирование экспериментальных и теоретических методов.
Далее приведено краткое описание некоторых возможных подходов:
- Дебит может быть измерен непосредственно экспериментальным путем при наличии необходимого оборудования или может быть рассчитан на основании длины хода плунжера и периода хода, которые могут быть измерены или рассчитаны.
- Период T(Ω) хода для данной входной скорости Ω(s) может быть измерен непосредственно при вводе в VFD реальной системы насос/скважина или может быть рассчитан теоретически, при условии, что скорость двигателя повторяет входную скорость VFD с постоянной входной задержкой.
- Длина хода плунжера может быть измерена экспериментально, например, при установке акселерометров на плунжере или может быть рассчитана двумя путями: 1) с использованием математической модели движения плунжера на основании измерений поверхностной динамограммы, то есть перемещения и усилия полированного штока; и 2) за счет применения чисто теоретического метода, с использованием расчета движения полированного штока как функции скорости двигателя и с использованием анализа с прогнозированием, чтобы найти отклик плунжера на это движение.
- Напряжения вдоль колонны насосных штанг могут быть измерены экспериментально, например, за счет установки тензодатчиков в различных местах (хотя это является достаточно непрактичным), или могут быть рассчитаны двумя путями: 1) с использованием математической модели перемещений колонны насосных штанг и приложенных к ним сил на основании измерений поверхностной динамограммы; и 2) за счет применения чисто теоретического метода, с использованием расчета движения полированного штока как функции скорости двигателя и с использованием анализа с прогнозированием, чтобы найти распределения напряжений в колонне насосных штанг.
- Вращающий момент двигателя может быть измерен непосредственно с использованием выходного сигнала VFD при приложении желательной входной скорости VFD к системе насос/скважина, или может быть рассчитан, с использованием уравнений динамического равновесия поверхностного блока, на основании теоретически рассчитанной силы в полированном штоке, полученной из динамической модели колонны насосных штанг.
- Потребляемая мощность двигателя может быть измерена непосредственно с использованием выходного сигнала VFD при приложении желательной входной скорости VFD к системе насос/скважина или может быть рассчитана теоретически на основании работы, выполненной теоретически рассчитанным вращающим моментом, при налагаемой угловой скорости двигателя.
Проблемы (I) и (II) оптимизации являются очень похожими с математической точки зрения и могут быть решены с использованием одних и тех же методов. Поэтому возможное решение будет приведено здесь только для случая (I). Решение проблемы (I) может быть получено (но без ограничения) при помощи следующего итеративного подхода, который был выбран с учетом высоко нелинейной природы этой проблемы.
Функция Ω [p](s), описывающая любую допустимую входную скорость VFD, которая отвечает условию (С), может быть представлена в виде следующего ряда Фурье:

в котором
p=[p1,…,[p2N+1]=[β,γ1,…,γN,λ1,…,λN] представляет собой вектор переменных/ параметров оптимизации, представляет собой типичную постоянную рабочую скорость первичного двигателя для специфических скважины и блока откачки.
N представляет собой выбранное число членов в ряде Фурье, обычно не превышающее 4.
Задачей оптимизации является нахождение вектора p параметров, для которых функция Ω[p](s) максимизирует дебит V(Ω), определенный выражением (1), однако при выполнении условий (А) и (В). За счет нелинейной природы этой проблемы, оптимальное решение может быть найдено с использованием итеративного метода, начиная от некоторого начального набора параметров, обычно выбираемого на основании собственного опыта. Чем ближе к оптимальным выбраны начальные значения, тем быстрее может быть достигнута сходимость к оптимальной точке. Типично используют следующие начальные параметры:
β=1
λ1∈(-0.1, 0.1) в зависимости от материала насосной штанги (стекловолокно или сталь)
λi=0 для i>1
γ2=0.2, γi=0 (i=1 или i>2)
Теперь любые рабочие параметры системы откачки, управляемые непосредственно или косвенно за счет входной скорости Ω[p](s) VFD, такие как дебит V(Ω[p]), вращающий момент M(Ω[p],s) первичного двигателя и напряжения σ(Ω[р],x,t) в колонне насосных штанг, могут быть обработаны как функции вектора р параметра:
V[p]=V(Ω[p]))

σ[р],x,t)=σ(Ω[p],x,t) xε(0,L); tε(0,Т).
Путем использования одного из описанных здесь раньше методов можно определить значения всех указанных выше функций в начальной точке р=р0. Затем можно найти такой вектор δр=[δр1,..., δр2N+1], для которого функции σ[р0+δр] и М[р0+δр] удовлетворяют ограничениям (А) и (В), и для которых максимум функции V[р0+δр] достигается в окрестности точки р0

Функции V, М и σ параметров р имеются в аналитической форме и зависят от этих параметров высоко нелинейным образом. Их определение даже может предусматривать проведение физических испытаний. Однако эти функции могут быть аппроксимированы в точке р0 линейными функциями δр с использованием ряда Тейлора первого порядка:



где частные производные функций V, М и σ рассчитывают из конечных разностей для каждого i (i=1,…,2N+1) с использованием следующих формул:



Δpi=[0,…,Δpi,…0]


T[p]=T(Ω[p]).
Различные входные параметры р=р0+Δpi(i=1,…2N+1) создают вариации скорости двигателя, которые могут приводить к небольшим изменениям периода Т[р0+Δpi] хода относительно р=р0. Для обеспечения возможности наложения напряжений σ (Ω[p],x,t) вдоль колонны насосных штанг для одного и того же момента в течение циклов с различными периодами, время t может быть масштабировано на постоянный опорный период Т[р0], например, время t, определенное для периода Т[р0+Δpi], может быть преобразовано во время ti+ для периода Т[р0].
При проведении расчета частных производных с использованием метода конечных разностей, значения Δpi следует выбирать так, чтобы обеспечивать быструю сходимость к оптимальному решению нелинейной проблемы. Для того чтобы держать под контролем ошибку, которую получают за счет аппроксимации нелинейной проблемы, следующие дополнительные ограничения налагают на значения δpi
(Е)|δpi|<θΔpi(i=1,…,2N+1)
где θ первоначально устанавливают равным 1, но которое необходимо уменьшить, если встречаются трудности с достижением сходимости.
Как можно понять из рассмотрения уравнений (6а-с), высоко нелинейная проблема (I) оптимизации сводится к поиску минимума линейной функции V[р0+δp] вектора δр объекта при линейных ограничениях (А), (В) и (Е). Поиск указанного минимума может быть осуществлен специалистами в данной области с использованием любых известных методов линейного программирования.
После вычисления оптимального вектора δр0 для аппроксимации проблемы оптимизации, можно повторить весь процесс, начиная с новой точки p1=р0+δр0, которая будет ближе к оптимальному решению исходной нелинейной проблемы, чем точка р0. Этот процесс может быть повторен до тех пор, пока не будет изменения оптимального вектора р от предыдущей итерации, то есть

где ε представляет собой выбранный порог для критерия сходимости.
Наиболее эффективным является осуществление процесса оптимизации в два этапа. На первом этапе находят теоретическое оптимальное решение на основании только анализа с прогнозированием, без проведения испытаний на реальной системе насос/скважина для определения ее отклика на различные входные скорости (первоначально могут быть проведены только базовые испытания для определения параметров системы). На втором этапе находят фактическое оптимальное решение, исходя из теоретического решения и используя отклики реальной системы на различные входные скорости, требующиеся для алгоритма оптимизации. Переход между этими двумя этапами требует изменения параметров оптимизации от скорости двигателя к входной скорости VFD. Это требует проведения преобразования параметров ряда Фурье для отражения временной задержки между входной скоростью VFD и откликом двигателя, которое является, однако, достаточно прямым. Применение такого подхода с двумя этапами позволяет ограничить физические испытания системы только одной итерацией (однократным их проведением).
Метод применения
Специалистам в данной области хорошо известно, что для расчета оптимизированной скорости первичного двигателя следует провести оценку характеристик используемой системы откачки на основании точной ответной реакции системы. Точное положение полированного штока преимущественно определяют за счет использования оптического датчика положения, бесконтактного поворотного магниторезистивного датчика положения или другого аналогичного имеющего высокую точность поворотного датчика положения, установленного на центральном подшипнике станка-качалки или на кривошипе. В соответствии с настоящим изобретением преимущественно непрерывно контролируют и передают все режимы работы скважины на центральный компьютер, который производит расчет оптимальной скорости первичного двигателя и соответствующих рабочих параметров первичного двигателя. Новые параметры затем передают на местный контроллер скважины за счет пересылки данных по проводам или с использованием радиосвязи. Замкнутый контур обратной связи между местным контроллером и центральным компьютером позволяет корректировать математическую модель и подстраивать ее параметры для достижения наиболее точного отображения физического состояния скважинных и поверхностных компонентов, а также позволяет определять тренды и изменения режимов работы. Контроллер также позволяет обнаруживать любые опасные состояния вне заданного диапазона коэффициентов загрузки для любого компонента системы откачки. Таким образом, значения угловой скорости (об/мин), ускорения и вращающего момента для каждого участка цикла основаны на отслеживании оптимальной скорости первичного двигателя, чтобы максимально увеличить полный объем добычи, но при поддержании безопасных рабочих параметров.
Поверхностное оборудование и первичный двигатель
Поверхностное оборудование используют для создания колебательного движения насосной штанги и насоса на дне скважины. Блок откачки обычно содержит:
- балансир с головкой балансира;
- основание;
- шатун;
- кривошип с противовесами;
- редуктор и двигатель.
За счет оптимизации скорости первичного двигателя, чтобы надлежащим образом передавать движение полированного штока к колонне насосных штанг и насосу, эффективность блока откачки может быть повышена, потребляемая мощность может быть снижена, напряжения в колонне насосных штанг могут быть уменьшены и балансировка блока откачки может быть улучшена.
При переменной скорости двигателя все эти элементы вращаются и движутся с переменной скоростью и ускорением. Действия ускорения приводят к возникновению динамических сил и моментов, которые воздействуют на характеристики блока откачки в целом. Например, ускорение воздействует на вращающий момент редуктора, потребляемую мощность двигателя, прочность балансира и износ редуктора, и т.п. Надлежащая загрузка редуктора имеет особое значение, так как недогруженный блок работает с низким механическим кпд. Перегруженный блок может быть легко поврежден и затем потребует проведения больших работ по ремонту. Расчет значений динамического вращающего момента и прогнозирование/оптимизация характеристик блока откачки возможны только в том случае, когда известны правильные данные относительно весов и моментов инерции движущихся и вращающихся элементов блока откачки. Эти данные требуются для оценки характеристик ранее проведения любой оптимизации. В соответствии с предпочтительным вариантом, большую часть информации, которая необходима для расчета вращающих моментов, уравновешивающих нагрузок и т.п., получают автоматически.
Характеристики насосной штанги и насоса
Насосная штанга представляет собой длинную гибкую штангу, которая содержит несколько участков с различными поперечными сечениями. Эта штанга прикреплена на одном конце к балансиру блока откачки при помощи головки балансира и полированного штока и к погружному насосу на другом конце. Необходимо поддерживать напряжения и коэффициенты запаса прочности штанги в рекомендованных пределах, соответствующих усталостной прочности материала штанги. Оценку напряжений в штанге производят с использованием математической модели колонны насосных штанг, на основании одного из следующих положений:
- использование нагрузок в полированном штоке, измеренных на поверхности (диагностический анализ);
- оценка сил, действующих на плунжер на дне скважины (анализ с прогнозированием);
Расчет напряжений в колонне насосных штанг связан с комплексными механическими и математическими проблемами, вызванными тем, что:
- гибкая колонна насосных штанг является очень длинной и испытывает нелинейные перемещения и, возможно, выгибание;
- штанга имеет сложную трехмерную геометрию;
- штанга движется внутри лифтовой колонны не только вдоль нее, но и в боковом направлении;
- штанга находится в контакте с лифтовой колонной, которая непредсказуемым образом смещается вдоль штанги; и
- штанга погружена в вязкий флюид.
Для создания математической модели колонны насосных штанг требуется детальная и точная информация относительно множества параметров, которая позволяет точно определять нагрузки и напряжения в насосной штанге. Поэтому необходимо сначала разработать соответствующую математическую модель динамики колонны насосных штанг с правильными значениями параметров, а затем найти решение с использованием известных и эффективных математических методов. Дополнительную информацию, необходимую для процесса оптимизации, находят при помощи измерений, проводимых в скважине. Мгновенные измерения потока из скважины и дебита скважины, вместе с инструментами распознавания образов, которые используют для идентификации забойных характеристик, дают большое количество полезной информации. Системное программное обеспечение позволяет воспроизводить динамические режимы работы системы с использованием измерений поверхностной динамограммы и с использованием измерений дебита скважины. Программное обеспечение позволяет автоматически выбирать лучшие режимы откачки для снижения нагрузок в штанге, и определять профиль скорости двигателя в цикле откачки в соответствии с желательным движением насоса. Программное обеспечение позволяет выбирать оптимальное значение скорости откачки и определять оптимальную скорость первичного двигателя. Все эти изменения могут быть сделаны при минимальных затратах, при этом может быть достигнуто снижение эксплуатационных расходов, так как не требуются никакие физические изменения конфигурации поверхностного блока, колонны насосных штанг или насоса (при условии, что блок содержит все элементы, необходимые в соответствии с настоящим изобретением).
Применения
Несмотря на то что теперь для специалистов в данной области становятся очевидными различные применения средств и способов управления скоростью первичного двигателя и, следовательно, движением полированного штока, некоторые применения являются особенно полезными в области добычи флюида из скважины.
Использование предложенных здесь средств и способов, например, для оценки производительности и оптимальных рабочих параметров возвратно-поступательного насоса, расположенного ниже уровня флюида в скважине и соединенного с возвратно-поступательным механизмом на поверхности при помощи системы гибких насосных штанг, может быть осуществлено путем:
a) расчета производительности гибкой насосной штанги и насоса при помощи любого подходящего цифрового метода, известного специалистам в данной области, чтобы точно определить и рассчитать все переменные в механической системе насосных штанг, погружного насоса и поверхностного блока, при динамическом изменении скоростей и ускорений всех компонентов, которые обладают массой и инерцией в такой системе, изменяющей механическое и вязкое трение и т.п.; и
b) расчета оптимизированной производительности и оптимизированной работы поверхностного блока, такого как (но без ограничения) станок-качалка с балансирным уравновешиванием, блок с длинным ходом или блок с гидравлическим управлением, имеющего первичный двигатель, работающий с преднамеренно заданной не постоянной скоростью вращения в любом одиночном цикле возвратно-поступательного движения, чтобы получить желательную оптимизированную работу полированного штока, колонны насосных штанг и погружного насоса.
Предложенные здесь технические средства и способы позволяют также улучшить производительность откачки системы откачки с использованием насосных штанг за счет управления работой системы откачки, которая содержит:
a) привод с регулируемой скоростью и первичный электродвигатель, с тормозным или регенеративным блоком или без них, для управления возвратно-поступательным движением поверхностного блока в соответствии с оптимизированными параметрами в течение каждого одиночного цикла движения, при непостоянных скорости вращения, ускорении и вращающем моменте;
b) местный блок управления, которым может быть программируемый контроллер или цифровой процессор на базе компьютера, с операционной системой с одно- или многозадачным режимом, с отдельной или объединенной частью привода с регулируемой скоростью, чтобы вводить желательные характеристики возвратно-поступательного движения поверхностного блока в привод с регулируемой скоростью минимум 24 раза в течение каждого одиночного цикла возвратно-поступательного движения;
c) местный блок сбора данных, которым может быть программируемый контроллер или цифровой процессор на базе компьютера, с операционной системой с одно- или многозадачным режимом, с отдельной или объединенной частью привода с регулируемой скоростью, чтобы записывать параметры времени, угловой скорости, ускорения и вращающего момента привода с регулируемой скоростью, параметры нагрузки и положения полированного штока, давления в лифтовой колонне и давления в обсадной колонне, и возможный расход в течение каждого одиночного цикла возвратно-поступательного движения;
d) удаленную вычислительную станцию с контуром обратной связи, замкнутым через канал связи, позволяющую оптимизировать местный блок управления и управлять им. Удаленная вычислительная станция может быть расположена на большом расстоянии или поблизости и может управлять одним местным блоком управления или любым их числом.
Эта система обсуждается далее более подробно.
Описанные здесь технические средства и способы позволяют автоматически изменять рабочие параметры блока откачки с насосными штангами в ответ на изменение режимов в скважинных или поверхностных компонентах, за счет следующих операций:
a) создание постоянной связи в реальном времени с местным контроллером блока откачки по Интернету, причем эта связь может быть осуществлена при помощи проводной связи, радиосвязи или спутниковой связи;
b) расчет оптимизированных рабочих параметров с использованием любого подходящего цифрового способа, известного специалистам в данной области, и введение их за счет программирования в средство аварийной сигнализации или в средство отключения местного блока управления, позволяющие обнаруживать, что в течение одиночного хода рабочие режимы блока откачки превышают предельные значения;
c) введение корректирующего действия за счет программирования в местный блок управления, причем указанным корректирующим действием может быть сигнал аварии, немедленное отключение, медленное отключение в течение одного цикла или переключение в предварительно заданный аварийный режим;
d) установление связи с удаленной вычислительной станцией, немедленно или в течение заданного временного периода;
e) введение стандартной программы корректирующего действия в удаленную вычислительную станцию, чтобы автоматически анализировать новый режим блока откачки, который имеет отклонения от ранее рассчитанных наилучших рабочих режимов;
f) автоматическая или при помощи оператора загрузка новых рабочих параметров в местный блок управления, чтобы корректировать характеристики насоса в новых условиях;
g) автоматическая или при помощи оператора загрузка новых рабочих параметров в местный блок управления, чтобы изменять скорость распределения химикатов в ответ на повышенное трение в скважине за счет осаждения различных материалов.
В качестве последнего примера использования настоящего изобретения можно указать, что предложенные здесь технические средства и способы могут быть использованы для автоматического предотвращения или исключения образования газовых пробок в насосе за счет следующих операций:
a) обнаружение газовой пробки за счет (измерения) усилий, действующих на плунжер при его ходе вниз;
b) расчет давления начала кипения при протекании флюида, которым может быть нефть с водой или без нее, через самое узкое сечение всасывающего клапана скважинного насоса;
c) расчет оптимального движения плунжера, чтобы снизить до минимума скорость плунжера во время хода вниз, для того чтобы снизить до минимума скорость флюида и падение давления во флюиде у всасывающего клапана, чтобы удерживать давление выше давления начала кипения;
d) управление скоростью и ускорением первичного двигателя в диапазоне расчетного оптимального движения, чтобы снизить до минимума или исключить вероятность образования газовых пробок при точном движении полированного штока.
Были приведены только некоторые примеры того, как настоящее изобретение может быть использовано в ряде практических рабочих ситуаций при добыче флюида из скважины, с использованием описанных здесь способов и системы.
Система
Обратимся теперь к рассмотрению чертежей, на которых показан примерный вариант системы в соответствии с настоящим изобретением.
Обратимся сначала к рассмотрению фиг.1, на которой показана типичная станок-качалка с балансирным уравновешиванием для нефтяной скважины, содержащая множество подвижных частей, которые создают значительные силы инерции при ускорении или замедлении, превышающие типичные статические силы. Головка 1 балансира станка-качалки соединяет штанговую систему 9 и насос 10 с балансиром 2 при помощи кабельных перемычек и крюка штанги. Шатун 3 соединяет балансир 2 с кривошипом 5, имеющим противовесы 6. Кривошип 5 соединен с валом редуктора 4, который приводится в движение при помощи системы ремней от первичного двигателя 7.
Штанговая система 9 и насос 10 подвергаются механическому трению (за счет взаимодействия насоса 10 с цилиндром насоса и штанги 9 с лифтовой колонной), флюидному трению (за счет перемещения штанги 9 в вязком флюиде и движения вязкого флюида в лифтовой колонне и через клапаны насоса 10) и усилиям за счет гидростатического давления и инерции флюида. Штанговая система 9 представляет собой гибкое соединение между поверхностными компонентами и погружным насосом 10. На ее характеристики гибкости сильно влияют размеры и свойства материала каждой секции штанги и глубина скважины. За счет гибкости штанги 9 и циклических изменений усилия, скорости и ускорения полированного штока, насосная штанга 9 совершает колебания в продольном и поперечном направлениях в скважине.
Четыре средства измерения или датчика установлены на блоке откачки. Средство измерения или датчик 11 нагрузки, которым может быть тензодатчик, соединен с полированным штоком и вырабатывает выходной сигнал, пропорциональный нагрузке. Имеющий высокую точность датчик положения, которым может быть оптический датчик 8 положения, установлен на центральном подшипнике и закреплен на стойке балансира. Он позволяет определять точное положение балансира 2, вне зависимости от скорости вращения или ускорения. Два датчика давления установлены на устье скважины, а именно датчик 12 давления в лифтовой колонне и датчик 13 давления в обсадной колонне. Они позволяют определять точное давление, чтобы надлежащим образом оценивать работу насоса в течение каждого цикла.
Станок-качалка с балансирным уравновешиванием приводится в движение при помощи первичного двигателя 7, которым может быть имеющий высокий кпд двигатель Nema В, чтобы создавать возвратно-поступательное движение полированного штока в соответствии с требуемой схемой движения. Полированный шток соединен при помощи различных переходов насосной штанги 9 с погружным насосом 10. Настоящее изобретение направлено на такое управление движением полированного штока, что погружной насос 10 совершает возвратно-поступательное движение в течение любой требуемой длины хода, чтобы максимально повысить дебит скважины при ограниченной усталостной нагрузке насосной штанги 9. Кроме того, можно управлять скоростью погружного насоса 10 и его работой для предотвращения чрезмерного трения, образования газовых пробок и других вредных режимов в скважине.
Как это показано на фиг.1, сигнал 17 положения, сигнал 18 нагрузки, сигнал 19 давления в лифтовой колонне и сигнал 20 давления в обсадной колонне поступают в местный блок 21 управления, который преобразует, обрабатывает и хранит эту информацию в цифровой памяти, которой может быть (но без ограничения) накопитель на жестких дисках или модули твердотельной памяти. Дополнительные сигналы 16 скорости и вращающего момента поступают в блок 21 управления от контроллера 14 типичного привода с регулируемой скоростью, который управляет работой первичного двигателя 7 за счет изменения напряжения, тока и частоты питания, подаваемого на первичный электродвигатель 7. Первичный электродвигатель 7 и контроллер 14 привода с регулируемой скоростью имеют связь при помощи сигнала 15. Контроллер 14 привода с регулируемой скоростью может содержать динамический тормозной резистор и различные другие компоненты и может быть контроллером любого подходящего типа, имеющимся в продаже. Местный блок 21 управления передает всю собранную информацию через блок связи на удаленную вычислительную станцию 23, которой может быть имеющий большую вычислительную мощность настольный компьютер с мультипрограммируемой (с многозадачным режимом) операционной системой. Могут быть использованы различные средства 22 связи, в том числе средства проводной связи, Интернет, радиосвязь, телефонная сеть или спутниковая связь. Канал связи создает замкнутый контур обратной связи между местным блоком 21 управления и удаленной вычислительной станцией 23.
Режимы работы в скважине и на поверхности анализируют и оптимизируют при помощи программного обеспечения, на основании процесса, операции которого показаны на фиг.2а и 2b и который включает в себя как анализ с прогнозированием, так и диагностический анализ. Операции 30-44 этого процесса показаны на фиг.2а, а последующие операции 46-60 этого процесса показаны на фиг.2b.
На фиг.3-6 приведены эксплуатационные данные для скважины глубиной 9,057 фута, которая была одной из четырех испытательных скважин для оценки настоящего изобретения. Имеющий обычную геометрию блок откачки (640-365-168) был соединен со штанговым насосом диаметром 1.75 дюйма, имеющим толстые стенки, при помощи колонны стальных насосных штанг, собранной из пяти секций различного диаметра. Данные были получены для типичного режима постоянной скорости и для оптимизированного режима с использованием первичного двигателя с оптимальной переменной угловой скоростью. Длину хода погружного насоса контролировали путем измерения объема добычи в течение периода 24 часа. Данные измерения уровня флюида были использованы для проверки расчетных усилий, действующих на плунжер. Производили длительный сбор данных в течение времени свыше шести месяцев для подтверждения эффективности и для дальнейшего развития технических средств, методики оптимизации и программного обеспечения.
На фиг.3 показан график измеренной скорости первичного двигателя для двух случаев: постоянная скорость, обеспечивающая скорость откачки 6.3 SPM (ходов с минуту) при постоянной скорости кривошипа; и оптимизированная переменная скорость первичного двигателя, обеспечивающая скорость откачки 7.6 SPM.
На фиг.4 показан график измеренной линейной скорости полированного штока до и после оптимизации. Четко видно, что оптимальная скорость не является постоянной на всех участках хода, что предписывалось в соответствии с известным уровнем техники, и значительно отличается от типичной скорости полированного штока при постоянной угловой скорости первичного двигателя.
На фиг.5 показан график измеренных усилий полированного штока и расчетных усилий плунжера относительно перемещения во время работы насоса с постоянной скоростью первичного двигателя и с оптимизированной оптимальной переменной скоростью первичного двигателя.
При помощи программного обеспечения был произведен расчет и выбрана постоянная угловая скорость, соответствующая 6.3 SPM, создающая длину хода насоса 114 дюймов, что было подтверждено фактическими измерениями потока флюида из скважины на поверхность. За счет применения оптимизированной переменной скорости первичного двигателя, полученной за счет расчета при помощи программного обеспечения, период хода был уменьшен, чтобы соответствовать 7.6 SPM, при этом длина хода насоса была увеличена до 143 дюймов, что было подтверждено фактическими измерениями потока флюида из скважины на поверхность. Полученное резкое увеличение дебита частично объясняется как увеличением длины хода насоса (на 25%), так и уменьшением времени хода (на 20%). При этом не наблюдали повышения усилий, действующих на любой компонент оборудования скважины, причем за счет использования инерции вращающихся грузов потребление энергии было снижено на 27%. Для специалистов в данной области является совершенно очевидным, что для любой типичной скважины, за счет повышения постоянной скорости первичного двигателя, чтобы увеличить постоянную скорость насоса от 6.3 SPM до 7.6 SPM, может быть достигнуто намного меньшее увеличение длины хода насоса, однако при значительном повышении потребляемой энергии и усилий, действующих на компоненты системы.
На фиг.6 показан график измеренного вращающего момента редуктора до и после оптимизации. Так как вращающий момент редуктора значительно ниже максимально допустимого вращающего момента, задачей оптимизации является снижение до минимума регенеративного вращающего момента, чтобы снизить до минимума его отрицательное влияние на срок службы редуктора.
Производят расчет оптимальной скорости, ускорения и вращающего момента первичного двигателя, а также расчет безопасных рабочих режимов, и все эти данные передают в местный блок управления 21. Отклик блока после минимум одного полного цикла работы затем передают при помощи блока связи в дистанционную вычислительную станцию 23 и анализируют в ней. Если оптимизированные параметры (такие как расчетная длина хода насоса, время хода, потребляемая мощность, уровни нагрузок и напряжений в системе штанг и в поверхностных компонентах, скорость флюида у всасывающего клапана, максимальный и минимальный вращающий момент двигателя и т.д.) являются удовлетворительными, расчеты больше не производят, если только в последующем не будет обнаружено ухудшение дебита скважины. Периодически, с заданными временными интервалами, дистанционный блок 23 или местный блок 21 проверяют состояние блока откачки. Местный блок 21 управления позволяет создать привод 14 с регулируемой скоростью, имеющий расчетную угловую скорость (об/мин) и ускорение минимум с 24 ступенями в течение каждого цикла, причем блок 21 контролирует работу блока откачки, обеспечивая безопасные рабочие параметры, такие как максимальная и минимальная нагрузка полированного штока, вращающий момент двигателя, вращающий момент редуктора, перемещение полированного штока, давление в лифтовой колонне, давление в обсадной колонне и время хода.
Если любой из безопасных рабочих параметров выходит за пределы заданных значений, местный блок 21 начинает корректирующее действие, такое как замедление или отключение блока, при этом создается аварийное сообщение, которое поступает на удаленную вычислительную станцию 23 через систему с замкнутым контуром обратной связи. Последние рабочие режимы поступают на удаленную вычислительную станцию 23, производится расчет новых оптимизированных рабочих параметров, которые затем передают на местный блок 21.
Несмотря на то что был описан предпочтительный вариант осуществления изобретения, совершенно ясно, что в него специалистами в данной области могут быть внесены изменения и дополнения, которые не выходят за рамки формулы изобретения.
Реферат
В изобретении предлагаются способ и система для блока откачки с гибкой штанговой системой для обеспечения максимальной добычи флюида. Максимальный ход насоса и самое короткое время цикла рассчитывают на основании всех статических и динамических характеристик скважинных и поверхностных компонентов, без ограничения угловой скорости первичного двигателя. Ограничения, касающиеся конструкционной прочности и усталостной прочности, вводят в расчет оптимизации для обеспечения безопасной работы, при поддержании максимального откачиваемого объема и минимального потребления энергии. Расчетную оптимальную скорость первичного двигателя задают штанговому насосу при помощи станка-качалки с балансирным уравновешиванием, блока с большим ходом или гидравлического блока откачки, за счет управления скоростью, ускорением и вращающим моментом первичного двигателя или за счет регулировки давления и расхода в системе откачки штанговым насосом с гидравлическим управлением. Позволяет оптимизировать скорость первичного двигателя штангового насоса для максимального повышения добычи нефти, при одновременном снижении эксплутационных расходов и обеспечении работы с безопасным коэффициентом загрузки. 4 н. и 14 з.п.ф-лы, 6 ил.
Формула
(i) использование конечного числа параметров p для отображения угловой скорости Ω[p] двигателя в виде функции одной из переменных, выбранной из группы переменных, в которую входят положение s полированного штока, положение кривошипа (только для станков-качалок с балансирным уравновешиванием) или время t, соответственно, Ω[p](s), Ω[p](a) или Ω[p(t) для каждого одиночного полного цикла откачки;
(ii) создание динамической модели полной системы откачки, в том числе как поверхностного оборудования, включающего в себя качалку упрощенного типа с двигателем и полированным штоком, так и скважинного оборудования, включающего в себя насосную штангу с погружным насосом, для расчета вращающего момента двигателя, напряжений в указанной насосной штанге и выходного дебита скважины, в ответ на заданную угловую скорость Ω[p] двигателя, причем указанный выходной дебит V(Ω) скважины определен как объем Vol(Ω), откачиваемый насосом в течение периода T(Q) одного цикла, то есть V(Ω)=Vol(Ω)/T(Ω); и
(iii) определение параметров p при помощи математического алгоритма для решения проблем нелинейной оптимизации, при которых угловая скорость Ω[p] двигателя максимально повышает дебит V(Ω) скважины, при удовлетворении следующих ограничений:
(a) минимальные и максимальные напряжения насосной штанги в течение указанного полного единичного цикла, полученные за счет налагаемой скорости Ω двигателя, не превышают заданных предельных значений;
(b) вращающий момент двигателя, необходимый для создания скорости Ω двигателя, не превышает заданного предельного значения в течение указанного цикла;
(c) угловая скорость Ω двигателя одинакова в начале и конце цикла откачки;
(d) угловая скорость Ω двигателя не превышает заданного предельного значения в течение цикла откачки; и
(e) энергия потребления двигателя, поделенная на объем откачиваемого флюида, рассчитанная с использованием вращающего момента двигателя и угловой скорости в течение цикла откачки, не превышает заданного предельного значения.
(i) отображение угловой скорости Ω двигателя в виде ряда Фурье для положения полированного штока s, чтобы удовлетворять ограничению 1.(iii)(c):

где вектор p=[β,γ1,…,γN,λ1,…λN] содержит коэффициенты Фурье, Ω0 представляет собой типичную рабочую постоянную скорость данной качалки упрощенного типа,
a so обозначает удвоенную длину хода полированного штока;
(ii) создание математической модели для расчета перемещений, сил и напряжений в насосной штанге и полированном штоке в течение цикла откачки, которые будут возникать при движении полированного штока, вызванном приложенной заданной переменной угловой скоростью Ω двигателя;
(iii) создание математической модели для расчета вращающего момента двигателя, который требуется для создания заданной переменной угловой скорости Ω двигателя, причем в указанной модели используют силу полированного штока, рассчитанную в модели 3.(ii), и силу тяжести и силы инерции, воздействующие на все компоненты качалки упрощенного типа, которые определяются ее геометрией и распределением масс;
(iv) создание математической формулы для расчета потребления энергии двигателем на основании вращающего момента и угловой скорости двигателя;
(v) создание математической формулы для расчета выходного дебита V(Ω) скважины на основании отношения длины хода погружного насоса к периоду хода T(Ω);
и
(vi) создание математического алгоритма для определения оптимального распределения мгновенной угловой скорости двигателя в течение каждого единичного цикла откачки за счет нахождения оптимального набора p=[β,γ1,…,γN,λ1,…λN] коэффициентов Фурье, так что объем V(Ω [p]) откачки становится максимальным, при удовлетворении ограничений l.(iii)(a)-(e); причем указанный алгоритм содержит следующие операции:
(a) выбор начального вектора p0 коэффициентов Фурье и векторов Δрi их приращений для каждого параметра i=1,…2N+1;
(b) использование анализа с прогнозированием, который включает в себя математические модели, описанные в (ii)-(v), для расчета дебита V[p], потребляемой энергии Р[р], вращающего момента M[p](s) двигателя и распределения σ[p](x,t) напряжений в насосной штанге в течение всего цикла, в ответ на угловую скорость Ω [p] двигателя, определенную из приведенного выше уравнения 'О' в следующих точках: р=р0 и p=p0+Δpi (i=1,…2N+1);
(c) расчет частных производных функций V[p], M[p](s), σ[р](х,1) и Р[р] по отношению к параметрам pi(i=1,…2N+1), с использованием метода конечных разностей и инкрементных значений, вычисленных выше в 3.(vi)(b);
(d) использование расширения Тейлора первого порядка и частных производных, вычисленных выше в(с), чтобы получить линеаризованные функции V[p], M[p](s),), σ[p](x,t) и Т[р] по отношению к небольшим изменениям δpi параметров pi;
(e) линеаризация проблемы оптимизации по отношению к δpi за счет использования указанных линейных функций из 3.(vi)(d) при ограничениях, приведенных в п.1.(iii)(a)-(e), а также в функции V[p] оптимизации;
(f) использование метода линейного программирования для нахождения δpi, которое является решением проблемы линейной оптимизации, определенной в 3.(vi)(e), а именно которое позволяет максимально повысить дебит скважины, однако удовлетворяет линейным ограничениям относительно вращающего момента и скорости двигателя, напряжений в насосной штанге и потребляемой мощности;
(g) замена начального вектора р0 на р0+δр и повтор операций 3.(vi)(b)-(f) до тех пор, пока δр не станет меньше выбранного предельного значения;
и (h) преобразование функции Ω[p](s) в функцию времени или положения кривошипа.
(i) использование конечного числа параметров p для отображения скорости полированного штока U[p] в виде функции U[p](s) положения полированного штока s или функции U[p](f) времени t для полного цикла откачки;
(ii) создание динамической модели скважинного оборудования (насосной штанги с погружным насосом) для расчета напряжений в указанной насосной штанге и дебита скважины в ответ на заданную скорость полированного штока U[p], причем указанный дебит V(U) скважины определяют как объем Vol(U), откачиваемый в течение периода T(U) одного цикла, то есть V(U)=Vol(Ω)/T(Ω); и
(iii) определение параметров р при помощи математического алгоритма для решения проблем нелинейной оптимизации, при которых скорость U[p] полированного штока во время указанного цикла откачки будет максимально увеличивать дебит V(U) скважины, однако при удовлетворении следующих ограничений:
(a) минимальные и максимальные напряжения насосной штанги в течение указанного полного единичного цикла, полученные за счет налагаемой скорости U полированного штока, не превышают заданных предельных значений;
(b) скорость U полированного штока равна нулю в самом верхнем и самом нижнем положениях полированного штока;
(c) скорость U полированного штока не превышает заданного предельного значения в течение полного цикла откачки;
(d) энергия, необходимая для создания движения указанного полированного штока в течение периода одного цикла откачки, поделенная на объем откаченного флюида, не превышает заданное предельное значение.


и в котором указанную оптимальную переменную скорость полированного штока в течение единственного цикла откачки определяют из оптимального набора коэффициентов Фурье p=[u1U,…,uNU,u1D,…,uND].
(i) измерение физических режимов указанной системы откачки во время работы, а именно измерение нагрузки и положения указанного полированного штока, вращающего момента двигателя, потребления энергии, давления в лифтовой колонне и в обсадной колонне и дебита скважины;
(ii) сравнение результатов модели системы откачки и измеренных физических режимов для проверки и подстройки параметров модели системы откачки;
(iii) расчет новой оптимальной угловой скорости Ω, двигателя или новой оптимальной скорости U полированного штока на основании модели системы откачки с подстроенными системными параметрами.
(i) первичный электродвигатель для управления движением качалки упрощенного типа;
(ii) контроллер привода с регулируемой скоростью (VFD) для динамического управления мгновенной угловой скоростью первичного двигателя в полном цикле откачки;
(iii) скважинные компоненты откачки, содержащие насосную штангу для передачи движения качалки упрощенного типа к погружному насосу;
(iv) средства измерения для контроля рабочих режимов;
(v) местный блок управления, позволяющий передавать мгновенную скорость первичного двигателя на VFD и получать мгновенную скорость и вращающий момент первичного двигателя от VFD; причем указанный блок содержит программу, которая содержит модель системы откачки и различные средства принятия решения, для анализа переданной информации, оценки характеристик блока откачки и скважинных компонентов и определения оптимальной скорости первичного двигателя по п.1 или 10, которые применяют для управления скоростью первичного двигателя с заданными временными промежутками в полном цикле откачки.
(i) первичный электродвигатель для управления движением качалки упрощенного типа;
(ii) контроллер привода с регулируемой скоростью (VFD) для динамического управления мгновенной угловой скоростью первичного двигателя в полном цикле откачки;
(iii) скважинные компоненты откачки, содержащие насосную штангу для передачи движения качалки упрощенного типа к погружному насосу;
(iv) средства измерения для контроля рабочих режимов;
(v) местный блок управления, позволяющий передавать мгновенную скорость первичного двигателя на VFD и получать мгновенную скорость и вращающий момент первичного двигателя от VFD;
(vi) средства передачи сигнала, предназначенные для передачи информации в истинном масштабе времени от местного блока управления на удаленную вычислительную станцию;
(vii) причем указанная удаленная вычислительная станция снабжена программным обеспечением, которое содержит модель системы откачки и различные средства принятия решения, для анализа переданной информации, оценки характеристик блока откачки и скважинных компонентов и определения оптимальной скорости первичного двигателя по п.1 или 10, которые применяют для управления скоростью первичного двигателя с заданными временными промежутками в полном цикле откачки;
(viii) средства передачи оптимальной скорости первичного двигателя и новых рабочих параметров от удаленной вычислительной станции на местный блок управления для управления скоростью первичного двигателя.
Комментарии