Сеноуборочная машина с автоматическим регулированием высоты подъема - RU2653764C2
Код документа: RU2653764C2
Чертежи


Описание
Изобретение относится к сельскохозяйственной машине для заготовки фуража, выполненной с возможностью перемещения в направлении движения и содержащей шасси, с которым шарнирно соединена, по меньшей мере, одна штанга, на которой установлено, по меньшей мере, одно рабочее орудие, причем эта штанга содержит, по меньшей мере, первую часть, шарнирно соединенную напрямую или опосредованно с шасси, и вторую часть, подвижно соединенную с первой частью и несущую рабочее орудие, при этом машина содержит также, по меньшей мере, первое приводное устройство, соединенное с первой частью, и второе приводное устройство, соединенное со второй частью, при этом, по меньшей мере, одним из этих первого и второго приводных устройств управляют таким образом, чтобы регулировать расстояние, измеренное поперечно к направлению движения, на величину которого рабочее орудие находится сбоку относительно шасси, между минимальным значением и максимальным значением, при этом, по меньшей мере, другим из этих первого и второго приводных устройств управляют таким образом, чтобы перемещать вертикально рабочее орудие между, по меньшей мере, рабочим положением и, по меньшей мере, поднятым положением, в котором рабочее орудие находится на определенной высоте над землей, при этом машина содержит средства автоматического регулирования положения, по меньшей мере, одного из этих первого и второго приводных устройств по заданной величине регулирования, которая определяет целевую высоту рабочего орудия относительно земли.
Заявитель выпускает в продажу машину этого типа. Эта машина является укладчиком в валки лежащих на земле растений, содержащим два ротора, каждый из которых находится с одной стороны шасси машины. Каждый ротор установлен на оси вращения, по существу вертикальной во время работы, при этом указанная ось вращения установлена на телескопической штанге. Эта штанга содержит первую часть, шарнирно соединенную с шасси при помощи горизонтальной поворотной оси, ориентированной в направлении движения. Между шасси и этой первой частью штанги шарнирно установлен первый домкрат с возможностью вертикального перемещения ротора между рабочим положением, поднятым положением, используемым для прохождения над уже сформированными валками или над препятствиями, и положением транспортировки, в котором ось вращения ротора является по существу горизонтальной. Вторая часть штанги может перемещаться скольжением внутри первой части штанги, причем это скольжение обеспечивается вторым домкратом, шарнирно установленным между указанными частями штанги. Благодаря этому скользящему соединению, расстояние, отделяющее ось вращения ротора от поворотной оси первой части штанги, можно регулировать между минимальным значением и максимальным значением. Таким образом, обеспечиваемую роторами рабочую ширину можно изменять, в частности, в зависимости от рабочей мощности пресса или сеноуборочного механизма, используемого для подбора валка. На этой известной машине каждый ротор перемещается в поднятое положение за счет поворота штанги на определенный угол. Этот угол определен ходом перемещения соответствующего первого домкрата, которым управляют средства автоматического регулирования положения. Эти средства автоматического регулирования содержат вентиль, закрепленный на шасси, рычаг, который управляет открыванием и закрыванием вентиля, и средство регулирования, которое соединяет рычаг с первой частью штанги. Это средство регулирования выполнено в виде удлиненного отверстия, выполненного в первой части штанги, внутри которого рычаг можно перемещать и стопорить в разных положениях. Каждое положение рычага внутри удлиненного отверстия представляет собой заданную величину регулирования, которая определяет целевую высоту ротора относительно земли. Действительно, каждое из этих положений определяет угол поворота, на который поворачивается штанга, когда ротор поднимают над землей, и в соответствии с этим углом рычаг управляет закрыванием вентиля, чтобы остановить перемещение первого домкрата и застопорить первую часть штанги при достижении этого угла поворота. Недостатком этих средств автоматического регулирования является то, что каждая заданная величина регулирования определяет целевую высоту ротора, которая меняется, в частности, увеличивается вместе с расстоянием, отделяющим ось вращения ротора от поворотной оси первой части штанги. Действительно, скользящее соединение, по существу горизонтальное во время работы, наклоняется вверх и наружу относительно шасси, когда ротор поднимается. Следовательно, если заданная величина регулирования определяет минимальную целевую высоту, ротор можно поднять над землей с достаточной амплитудой, когда рабочая ширина отрегулирована на максимум, но, с другой стороны, этой амплитуды может оказаться недостаточно, когда рабочая ширина является минимальной. В таком случае поднятый ротор может разрушить уже сформированные валки или натолкнуться на препятствие. В обратном случае заданной величины регулирования, задающей максимальную целевую высоту, вертикальное перемещение ротора, находящегося на максимальном расстоянии от шасси, может намного превысить перемещение, необходимое для прохождения на сформированными валками или препятствиями, обычно встречаемыми на поле. В этой поднятой конфигурации роторов находящийся исключительно высоко центр тяжести машины может легко нарушить ее устойчивость, если поле является неровным или если скорость движения является слишком большой. Таким образом, средства автоматического регулирования известной машины не обеспечивают оптимального подъема роторов при разных установленных значениях рабочей ширины и в разных ситуациях, которые могут возникать во время работы и во время маневрирования.
Наиболее близкой к заявленной машине является машина, описанная в документе ЕР 2253186 А1, рабочее орудие которой представляет собой роторные грабли для сгребания лежащих на земле растений. Однако эта машина имеет только одно поперечное рабочее положение рабочего орудия относительно шасси. Следовательно, эта машина характеризуется ограниченной возможностью адаптации к разным рабочим ситуациям, так как ее общая рабочая ширина, а также ширина валка, формируемого из сгребаемых растений, являются фиксированными.
Задача изобретения состоит в создании сельскохозяйственной машины для заготовки фуража, в которой устранены вышеуказанные недостатки.
В связи с этим важным отличительным признаком изобретения является то, что средства автоматического регулирования выполнены с возможностью подъема рабочего орудия над землей на высоту, по существу равную целевой высоте, начиная, по меньшей мере, от двух поперечных рабочих положений рабочего орудия, находящихся на расстоянии от шасси в пределах между минимальным и максимальным значениями.
Когда рабочее орудие перемещают из первоначального рабочего положения в поднятое положение при помощи, по меньшей мере, одного из первого и второго приводных устройств, средства автоматического регулирования работают таким образом, что оно оказывается над землей на высоте, по существу равной целевой высоте, причем не зависимо от того, находится рабочее орудие первоначально в первом поперечном рабочем положении, например, соответствующем минимальной рабочей ширине, или во втором поперечном рабочем положении, например, соответствующем максимальной рабочей ширине. Поскольку заданную величину регулирования определяют таким образом, чтобы высота подъема рабочего орудия всегда была достаточной для прохождения над сформированными валками или препятствиями, в частности, когда рабочее орудие находится на расстоянии от шасси, близком к минимальному значению, средства автоматического регулирования позволяют избежать ситуации, в которой рабочее орудие может подняться слишком высоко над землей, в частности, когда рабочее орудие находится на расстоянии от шасси, близком к максимальному значению. Таким образом, в поднятом положении рабочего орудия машина в соответствии с изобретением обладает достаточной устойчивостью и одновременно позволяет сохранять достаточный просвет между землей и рабочим орудием.
Согласно предпочтительному отличительному признаку изобретения, средства автоматического регулирования выполнены с возможностью подъема рабочего орудия над землей на высоту, по существу равную целевой высоте, начиная от любого поперечного рабочего положения рабочего орудия, находящегося на расстоянии от шасси между минимальным и максимальным значениями. Таким образом, первоначально рабочее орудие находится в первом поперечном рабочем положении, соответствующем минимальной рабочей ширине, или во втором поперечном рабочем положении, связанном с максимальной рабочей шириной, или при любой установленной первоначально рабочей стороне рабочее орудие всегда поднимается над землей на высоту, по существу равную целевой высоте. Эту целевую высоту предпочтительно определяют или устанавливают таким образом, чтобы при любых обстоятельствах обеспечивать одновременно достаточный подъем рабочего орудия над землей и расположение центра тяжести на разумной высоте, чтобы сохранять хорошую устойчивость.
Согласно другому предпочтительному отличительному признаку изобретения, средства автоматического регулирования включают в себя средство регулирования, позволяющее корректировать заданную величину регулирования. Это средство регулирования позволяет пользователю легко изменять движения рабочих орудий с целью адаптации машины к различным ситуациям, возникающим во время работы или во время маневрирования.
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания неограничивающего варианта осуществления заявленной машины со ссылками на прилагаемые чертежи.
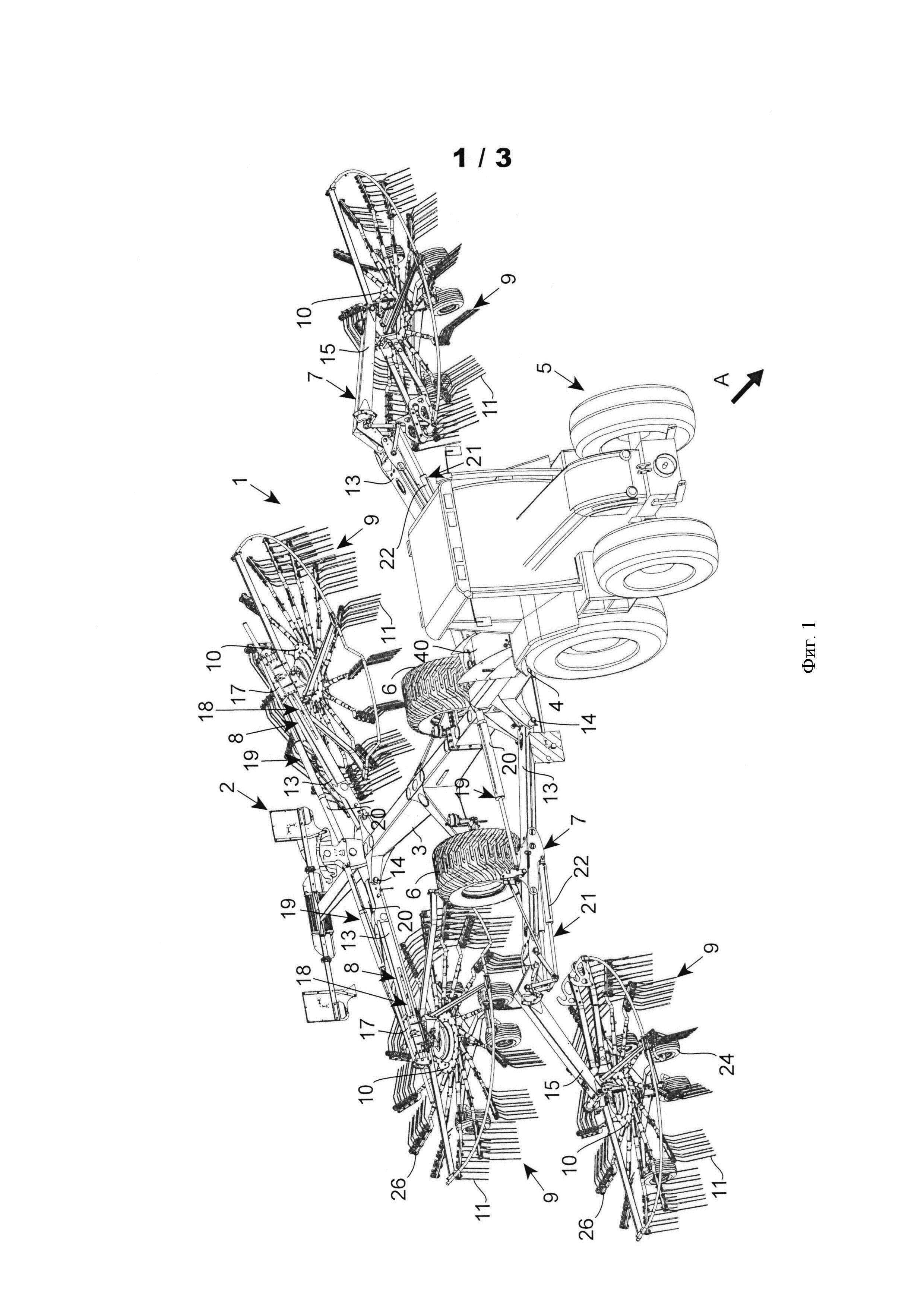
На фиг. 1 показан вариант осуществления машины в соответствии с изобретением, вид в перспективе;
на фиг. 2 показана первая версия осуществления машины, изображенной на фиг. 1, частичный вид спереди;
на фиг. 3 показана вторая версия осуществления машины, изображенной на фиг. 1, частичный вид спереди.
Показанная на фиг. 1 машина 1 в соответствии с изобретением содержит шасси 2, содержащее центральную балку 3, на переднем конце которой находится сцепное устройство 4 для ее соединения с трактором 5, обеспечивающим перемещение машины 1 в направлении движения А прямого хода. В дальнейшем тексте описания понятия «передний» и «задний» определены относительно направления движения А прямого хода, тогда как понятия «верх», «низ», «верхний» и «нижний» рассматриваются относительно земли.
В варианте осуществления, показанном на фиг. 1, шасси 2 опирается непосредственно на землю колесами 6. Эти колеса 6 установлены на колесной оси, соединенной с центральной балкой 3. С шасси 2 шарнирно соединена, по меньшей мере, одна штанга 7, 8, на которой установлено, по меньшей мере, одно рабочее орудие 9. В этом варианте осуществления рабочее орудие 9 содержит ротор 10 с орудиями 11, такими как вилы, предназначенные для перемещения находящейся на земле скошенной травы или соломы. Ротор 10 может вращаться вокруг оси 12 вращения, которая во время работы является по существу вертикальной. В этом варианте осуществления машина 1 содержит первую пару рабочих орудий 9, находящихся перед колесами 6 и распределенных с каждой соответствующей стороны от центральной балки 3, а также вторую пару рабочих орудий 9, находящихся сзади колес 6 и распределенных с каждой соответствующей стороны от центральной балки 3.
Каждое рабочее орудие 9 установлено на соответствующей штанге 7, 8. С каждой стороны от центральной балки 3 шасси 2 штанги 7 и 8 имеют разную длину. Таким образом, роторы 10, находящиеся спереди, удалены дальше от центральной балки 3, чем задние роторы 10. Таким образом, растения, укладываемые в валки самым передним ротором 10, находящимся на одной стороне центральной балки 3, могут перехватываться ротором 10, расположенным сзади с этой же стороны центральной балки 3, для формирования единого валка большего объема. Штанга 7, 8 содержит первую часть 13, соединенную напрямую с шасси 2 при помощи первого шарнира, содержащего первую поворотную ось 14. Эта первая поворотная ось 14 ориентирована таким образом, чтобы первую часть 13 штанги 7, 8 можно было перемещать в плоскости, поперечной к направлению движения А. Например, эта первая поворотная ось 14 ориентирована ближе к горизонтали и/или ближе к направлению движения А. Штанга 7, расположенная перед колесами 6, содержит вторую часть 15, подвижно соединенную с первой частью 13 при помощи второго шарнира, содержащего вторую поворотную ось 16. Эта вторая поворотная ось 16 ориентирована, например, ближе к горизонтали и/или ближе к направлению движения А. На своем конце, удаленном от второго шарнира, вторая часть 15 штанги 7 содержит рабочее орудие 9. Штанга 8, находящаяся сзади колес 6, содержит вторую часть 17, подвижно соединенную с первой частью 13 при помощи скользящего соединения 18. Это вторая часть 17 содержит, например, каретку, на которой установлено рабочее орудие 9 и которая может катиться внутри паза, выполненного в первой части 13 штанги 8 и ориентированного в продольном направлении этой первой части 13 штанги 8. Скользящее соединение 18 можно получить также путем выполнения второй части 17 в виде трубы, на которой установлено рабочее орудие 9 и которая перемещается скольжением внутри трубы, слегка большей, чем труба первой части 13.
С первой частью 13 штанги 7, 8 соединено первое приводное устройство 19. Это первое приводное устройство 19 соединено также с шасси 2. Это первое приводное устройство 19 содержит домкрат 20, в частности, гидравлический домкрат, шарнирно соединенный с шасси 2 и с первой частью 13. Первое приводное устройство 19 поворачивает первую часть 13 штанги 7, 8 относительно шасси 2 в плоскости, поперечной к направлению движения А. Эта плоскость является также по существу вертикальной. Первый приводным устройством 19 управляют таким образом, чтобы перемещать рабочее орудие 9 вертикально между, по меньшей мере, рабочим положением и, по меньшей мере, поднятым положением, в котором рабочее орудие 9 расположено на определенной высоте над землей, например, для прохождения над валками или препятствиями. На фиг.1 каждое рабочее орудие 9, расположенное справа от центральной балки 3, если смотреть в направлении движения А, находится в рабочем положении, тогда как каждое рабочее орудие 9, расположенное слева, находится в поднятом положении. В этих положениях второй шарнир штанги 7, находящейся перед колесами 6, расположен, в проекции на по существу горизонтальную плоскость, на некотором расстоянии от первого шарнира. Скользящее соединение 18 штанги 8, находящейся сзади колес 6, ориентировано поперечно к направлению движения А. В поднятом положении рабочего орудия 9 скользящее соединение 18 ориентировано с наклоном вверх и наружу относительно центральной балки 3 шасси 2. Первым приводным устройством 19 можно также управлять таким образом, чтобы перемещать рабочее орудие 9 в положение транспортировки. В этом положении второй шарнир штанги 7, находящейся спереди колес 6, расположен по существу над первым шарниром. Что касается штанги 8, находящейся сзади колес 6, то ее скользящее соединение 18 ориентировано ближе к вертикали.
С второй частью 17 штанги 7, 8 соединено второе приводное устройство 21. Это второе приводное устройство 21 соединено с первой частью 13. Это второе приводное устройство 21 содержит домкрат 22, в частности, гидравлический домкрат, шарнирно соединенный с первой частью 13 и с второй частью 15, 17. Управление вторым приводным устройством 21 позволяет регулировать расстояние d, измеренное поперечно к направлению движения А, на величину которого рабочее орудие 9 находится сбоку относительно шасси 2, чтобы установить рабочую ширину машины 1 и/или ширину формируемого валка. Это расстояние d отделяет центральную балку 3 шасси 2 от геометрической опорной точки рабочего орудия 9. На уровне шасси 2 расстояние d отсчитывают, например, от первой поворотной оси 14 штанги 7, 8. Геометрической опорной точкой является, например, внутренний конец рабочего орудия 9, расположенный ближе к центральной балке 3. В варианте осуществления, представленном на фигурах, геометрическая опорная точка является осью вращения 12 ротора 10, и расстояние d измеряют между этой осью вращения 12 и первой поворотной осью 14 штанги 7, 8 на шасси 20. Для штанги 7, находящейся перед колесами 6, второе приводное устройство 21 поворачивает вторую часть 15 штанги 7 относительно первой части 13 штанги 7. Этот поворот происходит в плоскости, поперечной к направлению движения А. Эта плоскость тоже является по существу вертикальной. При этом рабочее орудие 9 следует по круговой траектории вокруг второй поворотной оси 16. Таким образом, если в это же время первое приводное устройство 19 остается неподвижным, высота h рабочего орудия относительно земли меняется. Для рабочего орудия 9 эта высота h отделяет землю от орудий 11, в частности, от нижних концов этих орудий 11, и в варианте осуществления, показанном на фигурах, эти нижние концы представляют собой концы вил. В частности, эта высота h отделяет землю от нижнего конца орудия 11, находящегося в самом низу, когда рабочее орудие 9 поднято. Действительно, как показано на фиг. 2 и 3, рабочее орудие 9, находящееся в поднятом положении, может располагаться не параллельно относительно земли. В нижней части этих фигур земля показана горизонтальной линией, от которой отсчитывают высоту h. Для штанги 8, находящейся сзади колес 6, движение второго приводного устройства 21 приводит к поступательному перемещению второй части 17 штанги 8 относительно первой части 13 штанги 8, с которой она соединена при помощи скользящего соединения 18. Расстояние d, отделяющее рабочее орудие 9 от шасси 2, можно регулировать между минимальным значением и максимальным значением. В варианте осуществления, показанном на фигурах, эти два значения являются разными для рабочих орудий 9, находящихся перед колесами, и орудий, находящихся сзади.
Ротор 10 рабочего орудия 9 содержит картер 23. Этот картер соединен с соответствующей штангой 7, 8. На картере 23 установлена ось вращения 12. Эта ось вращения 12 содержит на своем нижнем конце кронштейн с роликами 24, находящимися под ротором 10. Эти ролики катятся по земле во время работы и помогают роторам 10 следовать неровностям грунта. Предпочтительно кронштейн и ролики 24 могут перемещаться скольжением вдоль оси вращения 12 таким образом, чтобы регулировать расстояние орудий 11 относительно земли, например, при помощи домкрата. На части оси вращения 12, которая расположена под картером 23, установлен корпус 25. Он установлен на оси вращения 12 при помощи подшипников качения, которые позволяют приводить его во вращение. Для вращения ротора 10 верхняя сторона корпуса 25 оснащена, например, зубчатым колесом, которое находится в картере 23. Это колесо зацепляется с шестерней, которая может быть соединена с механизмом отбора мощности трактора 5 при помощи известных специалисту промежуточных трансмиссионных валов. Приведение во вращение ротора 10 можно также осуществлять при помощи гидравлического или электрического двигателя. Ротор 10 содержит множество качающихся кронштейнов 26, на которых установлены орудия 11. Эти качающиеся кронштейны 26 установлены на корпусе 25. Эти качающиеся кронштейны 26 расположены в виде лучей относительно оси вращения 12 в плоскости, по существу перпендикулярной к этой оси. Качающиеся кронштейны 26 содержат внутреннюю часть, соединенную с корпусом 25, и наружную часть с установленной на ней орудиями 11. Внутренние части качающихся кронштейнов 26 соединены с корпусом 25 при помощи одного или нескольких подшипников, поэтому они могут поворачиваться вокруг своей оси. На части оси вращения 12, которая находится в корпусе 25, установлен неподвижный кулачок, предназначенный для управления качающимися кронштейнами 26 во время работы. Для этого каждый из качающихся кронштейнов 26 имеет на своем конце, проходящем внутрь корпуса 25, рычаг с роликом, который направляется в пазу кулачка. Во время работы орудия 11 подбирают растения, в частности, на передней части своей траектории, и укладывают их в виде валка в боковой части своей траектории.
Сельскохозяйственная машина 1 для заготовки фуража в соответствии с изобретением может быть сеноуборочной машиной, например, валкоукладчиком, в частности, описанным выше валкоукладчиком с четырьмя роторами. Разумеется, сельскохозяйственная машина 1 для заготовки фуража может быть также валкоукладчиком с двумя роторами, каждый из которых расположен с соответствующей стороны центральной балки шасси. Центральная балка может также нести только одну штангу и только один ротор. Кроме того, машина 1 может быть прицепной или полунавесной с главной колесной парой, при помощи которой шасси машины 1 опирается непосредственно на землю. Машина 1 может быть также навесной и соединенной с трактором 5 при помощи трехточечного сцепного устройства. В этом случае шасси машины 1 опирается на землю во время работы опосредованно при помощи роликов, расположенных под рабочими орудиями 9. Сельскохозяйственная машина 1 для заготовки фуража в соответствии с изобретением может быть также самоходной машиной с шасси, приводимым в движение при помощи одной или нескольких пар ведущих и/или направляющих колес. Сельскохозяйственная машина 1 для заготовки фуража в соответствии с изобретением может быть машиной, известной под названием "Merger". Рабочее орудие такой машины содержит подборщик. Этот подборщик содержит ротор, который может вращаться вокруг оси, расположенной во время работы поперечно к направлению движения А прямого хода и по существу горизонтально. Этот ротор может быть оборудован зубьями, которые описывают кривую огибающую во время вращения ротора. Ротор может также служить кронштейном для наматывания движущейся ленты, на которой установлены зубья, вилы или крюки. Подборщик находится перед конвейером, который может быть ленточным конвейером, роликовым конвейером или шнековым конвейером. Конвейер принимает растения, отбрасываемые назад подборщиком, и перемещает их поперечно по отношению к подборщику. При этом растения укладываются на землю в виде валка с целью их последующего сбора.
Согласно другим вариантам осуществления машины 1, не показанным на фигурах, первая часть 13 штанги 7, 8 может быть соединена с шасси опосредованно, например, при помощи набора шарнирных тяг. Такой набор представляет собой, например, шарнирный параллелограмм. Штанги 7, 8 могут также содержать более двух подвижных частей. Согласно другим вариантам осуществления машины 1, не показанным на фигурах, части 13, 15, 17 штанги 7, 8 и/или приводные устройства 19, 21 могут быть выполнены таким образом, чтобы регулирование расстояния d между рабочим орудием 9 и шасси 2 происходило при приведении в действие первого приводного устройства 19 или при последовательном или одновременном приведении в действие обоих приводных устройств 19 и 21. Точно так же, части 13, 15, 17 штанги 7, 8 и/или приводные устройства 19 и 21 могут быть выполнены таким образом, чтобы вертикальное перемещение рабочего орудия 9 происходило при приведении в действие первого приводного устройства 19 или при последовательном или одновременном приведении в действие обоих приводных устройств 19 и 21.
Машина 1 в соответствии с изобретением содержит средства 27 автоматического регулирования положения, по меньшей мере, одного из первого и второго приводных устройств 19 и 21 по заданной величине регулирования, которая определяет целевую высоту рабочего орудия 9 относительно земли. Эти средства 27 автоматического регулирования выполнены с возможностью подъема рабочего орудия 9 на высоту h от земли, по существу равную этой целевой высоте, начиная, по меньшей мере, от двух поперечных рабочих положений рабочего орудия 9, находящихся на расстоянии d от шасси 2 в пределах между минимальным и максимальным значениями.
Согласно предпочтительному отличительному признаку изобретения, средства 27 автоматического регулирования выполнены с возможностью подъема рабочего орудия 9 над землей на высоту h, по существу равную целевой высоте, начиная от любого поперечного рабочего положения рабочего орудия 9, находящегося на расстоянии d от шасси 2 между минимальным и максимальным значениями.
Средства 27 автоматического регулирования содержат средство 28 преобразования, которое на основании, по меньшей мере, одной входной физической величины, характеризующей поперечное рабочее положение рабочего орудия 9, находящееся на расстоянии d от шасси 2 в пределах между минимальным и максимальным значениями, выдает, по меньшей мере, одну управляющую величину, используемую для управления, по меньшей мере, одним из первого и второго приводных устройств 19 и 21.
Согласно варианту осуществления, показанному на фиг. 1, машина 1 имеет первую версию осуществления средств 27 автоматического регулирования штанги 7, расположенной спереди колес 6. В этом первой версии осуществления, показанной на фиг. 2, средство 28 преобразования содержит средство 29 угловой передачи с тягами или тросами, шарнирно соединенное с второй частью 15 штанги 7, с одной стороны, и с первой частью 13 штанги 7, с другой стороны. Первый рычаг 30, шарнирно соединенный с первой частью 13 штанги 7, использует общую шарнирную ось 31 со вторым рычагом 32, который шарнирно соединен с второй частью 15 штанги 7. Эти два рычага 30 и 32 расположены вблизи второй поворотной оси 16. Общая шарнирная ось 31 соединена со вторым домкратом 22, образующим второе приводное устройство 21. Этот второй домкрат 22 шарнирно соединен с первой частью 13 штанги 7. Первый рычаг 30 содержит тягу 33, которая проходит в направлении первой поворотной оси 14 вдоль первой части 13 штанги 7. Тяга 33 средства 29 угловой передачи действует на механический привод 34, с которым она соединена. Этот механический привод 34 выполнен в виде коромысла. Это коромысло установлено с возможностью поворота на оси, совпадающей с первой поворотной осью 14. Сторона коромысла, находящаяся противоположно стороне, на которой коромысло соединено с тягой 33, действует на кулачок, выполненный на поворотной оси механизма управления 35, представляющего собой гидравлический вентиль, связанный с шасси 2. Этот вентиль расположен на трубопроводе гидравлического питания первого домкрата 20, образующего первое приводное устройство 19, при этом указанный первый домкрат 20 шарнирно установлен между шасси 2 и первой частью 13 штанги 7. Перемещение коромысла заставляет перемещаться кулачок. В зависимости от подачи питания в домкрат 20 на сокращение и удлинение, то есть в зависимости от того, поворачивается первая часть 13 штанги 7 вверх или вниз, перемещение кулачка управляет открыванием или закрыванием вентиля, устанавливая или прекращая гидравлическое питание первого домкрата 20. В этой первой версии осуществления первый домкрат 20 предназначен для вертикального перемещения рабочего орудия 9, тогда как второй домкрат 22 предназначен для регулирования рабочей ширины. Для этого вторым домкратом 22 управляют таким образом, чтобы удалять или приближать вторую часть 1 штанги 7 относительно первой части 13 штанги 7 и, следовательно, относительно шасси 2. Таким образом, рабочее орудие 9 оказывается расположенным на расстоянии d от шасси 2 в пределах между минимальным и максимальным значениями. Это перемещение второй части 15 штанги 7 приводит к изменению угла α, который образует первый рычаг 30 с длиной первой части 13 штанги 7. Этот угол α представляет собой входную физическую величину, характеризующую поперечное рабочее положение рабочего орудия 9, находящегося на расстоянии d от шасси 2 в пределах между минимальным и максимальным значениями. В этой первой версии осуществления входная физическая величина характеризует, в частности, положение второй части 15 штанги 7 по отношению к первой части 13 штанги 7. Через тягу 33 средство 28 преобразования передает на основании этой входной физической величины управляющую величину на механизм 35 управления, соединенный с первым домкратом 20 первого приводного устройства 19. В данном случае, в качестве указанной управляющей величины используют положение коромысла, образующего механический привод 34. Это положение коромысла можно определить углом или расстоянием, значение которого представляет собой значение, принимаемое управляющей величиной. Когда первую часть 13 штанги 7 поворачивают вверх при помощи первого домкрата 20, коромысло перемещается вместе с этой первой частью 13 штанги 7 и в определенный момент приходит в положение, в котором оно закрывает вентиль. С этим очень точным положением коромысла связано целевое значение управляющей величины, и механизм управления обеспечивает прохождение силового потока, в данном случае гидравлического потока в первый домкрат 20, пока значение управляющей величины, то есть значение угла или расстояния, определяющее положение коромысла в момент t, не достигнет этого целевого значения, то есть значения угла или расстояния, определяющего положение коромысла, закрывающего вентиль. Взаимодействие средства 29 угловой передачи с первой частью 13 штанги 7, с второй частью 15 штанги 7 и, - через механический привод, - с механизмом 35 управления, предполагает наличие отношения, которое связывает целевое значение со значением, которое принимает входная физическая величина, с заданной величиной регулирования, с размерными параметрами штанги 7 и/или средства 28 преобразования и с параметрами расположения первой части 13 штанги 7 на шасси. Когда рабочее орудие 9 опирается на землю в данном поперечном рабочем положении, заданная величина регулирования, которая определяет целевую высоту подъема рабочего орудия 9, устанавливает определенное угловое положение коромысла вокруг его оси по отношению к первой части 13 штанги 7 или по отношению к вентилю. Предпочтительно средства 27 автоматического регулирования могут содержать средство регулирования, позволяющее корректировать эту заданную величину регулирования через постоянное смещение положения механического привода 34 относительно штанги 7 и/или относительно механизма 35 управления. Так, при данном поперечном рабочем положении рабочего орудия 9 на земле средство регулирования изменяет угловое положение коромысла вокруг его оси. В результате при этом данном поперечном рабочем положении меняется угол поворота, который образует первая часть 13 штанги 7 с горизонталью и при котором вентиль переходит из открытой конфигурации или в закрытую конфигурацию и наоборот. Средство регулирования может представлять собой гидравлический домкрат или систему винт-гайка, являющуюся частью средства 29 угловой передачи. Средство регулирования может также представлять собой регулируемый упор на коромысле. Наконец, средство регулирования может быть также образовано средством коррекции положения вентиля на шасси 2. Размерными параметрами штанги 7 являются, например, значения длины первой и второй частей 13 и 15 штанги 7. Размерными параметрами средства 28 преобразования являются, например, значения длины первого и второго рычагов 30 и 32, длина тяги 33, плечо рычага между первым рычагом 30 и тягой 33 и плечо рычага между тягой 33 и коромыслом. Параметром расположения первой части 13 штанги 7 на шасси 2 является высота первой поворотной оси 14 относительно земли. Другим параметром расположения является, например, расстояние, отделяющее первую поворотную ось 14 от продольной геометрической оси центральной балки 3 шасси 2. Увеличение рабочей ширины, регулируемой при помощи второго домкрата 22, приводит к увеличению угла α. При этом тяга 33 перемещает коромысло вокруг его оси в таком направлении, при котором сторона коромысла, действующая на кулачок вентиля, опускается. Если после этого рабочее орудие 9 перемещают из его рабочего положения в поднятое положение, коромысло закрывает вентиль относительно рано, и соответствующий угол поворота первой части 13 штанги 7 будет небольшим. Если рабочую ширину установить в меньшем значении, коромысло закроет вентиль позже во время перемещения рабочего орудия 9 из его рабочего положения в поднятое положение. В этом случае соответствующий угол поворота первой части 13 штанги 7 будет больше. При этом размерные параметры средства 28 преобразования и, возможно, штанги 7 выбирают таким образом, чтобы при заданной величине регулирования или при каждой заданной величине регулирования рабочее орудие 9 поднималось на высоту h от земли, по существу равную целевой высоте, определяемой заданной величиной регулирования, причем, начиная, по меньшей мере, от двух поперечных рабочих положений рабочего орудия 9, в частности, от каждого поперечного рабочего положения рабочего орудия 9.
Машина 1, показанная на фиг. 1, имеет вторую версию осуществления средств 27 автоматического регулирования штанги 7, расположенной перед колесами 6. Первый рычаг 30, шарнирно соединенный с первой частью 13 штанги 7, использует общую шарнирную ось 31 с вторым рычагом 32, шарнирно соединенным с второй частью 15 штанги 7. Эта два рычага 30 и 32 расположены вблизи второй поворотной оси 16. Общая шарнирная ось 31 соединена с вторым домкратом 22, образующим второе приводное устройство 21. Этот второй домкрат 22 шарнирно соединен с первой частью 13 штанги 7. В этой второй версии осуществления, показанной на фиг.3, средства 27 автоматического регулирования содержат средство 28 преобразования, использующее две входные физические величины, по меньшей мере, одна из которых характеризует поперечное рабочее положение рабочего орудия 9, находящееся на расстоянии d от шасси 2 в пределах между минимальным и максимальным значениями. В этой второй версии осуществления первый домкрат 20 используют для вертикального перемещения рабочего орудия 9, тогда как второй домкрат 22 предназначен для регулирования расстояния d между рабочим орудием 9 и шасси 2. Средство 28 преобразования содержит первое средство 36 измерения, выдающее первый сигнал, отображающий первую входную физическую величину, характеризующую положение первой части 13 штанги 7 относительно шасси 2. Кроме того, средство 28 преобразования содержит второе средство 37 измерения, выдающее второй сигнал, отображающий вторую входную физическую величину, характеризующую положение второй части 15 штанги 7 относительно первой части 13 штанги 7. Первое средство 36 измерения содержит первый датчик 38 угла, расположенный вблизи первой поворотной оси 14. Этот первый датчик 38 угла расположен между первой частью 13 штанги 7 и шасси 2. При этом первой входной физической величиной является первый угол α1, который образует первая часть 13 штанги 7 относительно шасси 2, например, как показано на фиг. 3, относительно вертикали, проходящей через первую поворотную ось 14. Этот первый угол α1 измеряют, в частности, в плоскости, поперечной к направлению движения, в которой первая часть 13 штанги 7 может поворачиваться относительно шасси 2. Первый сигнал является электрическим сигналом, выдаваемым этим первым датчиком 38 угла. Второе средство 37 измерения содержит второй датчик 39 угла, расположенный вблизи второй поворотной оси 16. Этот второй датчик 39 угла расположен между первой и второй частями 13 и 15 штанги 7. При этом второй входной физической величиной является второй угол α2, который образует вторая часть 15 штанги 7 относительно первой части 13 штанги 7. Второй сигнал является электрическим сигналом, выдаваемым этим вторым датчиком 39 угла. В этой второй версии осуществления средство 28 преобразования содержит вычислительное устройство 40, установленное на шасси 2. Это устройство соединено с первым и вторым средствами измерения 36 и 37, от которых оно получает в реальном времени первый и второй сигналы. Как показано на фиг. 3, соединение вычислительного устройства 40 с первым и вторым средствами измерения 36 и 37 осуществляют через электрические жгуты. Кроме того, вычислительное устройство 40 содержит память, позволяющую ему запоминать заданную величину регулирования, которая определяет целевую высоту подъема рабочего орудия 9. На основании первой и второй входных физических величин средство 28 преобразования выдает управляющую величину, используемую для управления приводным устройством 19. Для этого вычислительное устройство 40 выдает в реальном времени управляющую величину на основании первого и второго сигналов, отображающих эти первую и вторую входные физические величины. Вычислительное устройство 40 выдает в реальном времени управляющую величину в механизм 41 управления с целью управления первым домкратом 20 первого приводного устройства 19. Эта управляющая величина является электрически сигналом, передаваемым, как показано на фиг.3, через электрический жгут, соединяющий вычислительное устройство 40 с механизмом 41 управления. Механизм 41 управления содержит электровентиль. Этот электровентиль управляется по открыванию и закрыванию и соединен с первым домкратом 20. Вычислительное устройство 40 определяет целевое значение для управляющей величины. Электровентиль переходит из открытой конфигурации в закрытую конфигурацию и наоборот, когда эта управляющая величина имеет целевое значение. Механизм 41 управления обеспечивает силовой поток, в данном случае гидравлический поток в направлении первого домкрата 20, пока значение, принимаемое управляющей величиной, не достигнет целевого значения. Это целевое значение связано отношением с значениями, принимаемыми первой и второй входными физическими величинами, с заданной величиной регулирования, с размерными параметрами штанги 7 и с параметрами расположения первой части 13 штанги 7 на шасси 2. Это отношение включает в себя соответствующие передаточные функции первого и второго средств 36 и 37 измерения, а также правило, хранящееся в памяти вычислительного устройства 40. Каждая передаточная функция связывает первую, соответственно вторую входную физическую величину, - измеренный угол, то есть первый угол α1, соответственно второй угол α2, - с первым, соответственно вторым электрическим сигналом. Правило использует значения, принимаемые в реальном времени этими первым и вторым электрическими сигналами, заданную величину регулирования, а также указанные размерные параметры штанги 7 и параметры расположения первой части 13 штанги 7 на шасси 2. В зависимости от значения, принимаемого вторым углом α2 между первой и второй частями 13 и 15 штанги 7, конвертируемого вторым датчиком 39 угла во второй электрический сигнал, передаваемый в вычислительное устройство 40, последнее, на основании хранящегося в памяти отношения и заданной величины регулирования, имеющей в этом отношении определенное значение, определяет, на какой первый угол α1 следует повернуть вверх первую часть 13 штанги 7, когда рабочее орудие 9 перемещают из его рабочего положения в поднятое положение, совпадающее с целевой высотой, соответствующей заданной величине регулирования. Для этого на основании хранящегося в памяти отношения и заданной величины регулирования вычислительное устройство 40 определяет первое целевое значение для первого сигнала, выдаваемого первым датчиком 38 угла. Это первое целевое значение является значением, которое должен принимать первый сигнал, когда первый угол α1 поворота первой части 13 штанги 7 достигает значения, соответствующего положению рабочего орудия 9 на высоте h над землей, по существу равной целевой высоте. Кроме того, вычислительное устройство 40 содержит первый компаратор, который выдает первый сигнал сравнения, зависящий от отклонения между первым целевым значением и значением, принимаемым первым сигналом. В зависимости от значения, принимаемого этим первым сигналом сравнения, вычислительное устройство 40 определяет значение управляющей величины. Когда значение, принимаемое первым сигналом, достигает первого целевого значения, вычислительное устройство 40 связывает целевое значение со значением управляющей величины. Иначе говоря, значение управляющей величины является таким, при котором электровентиль обеспечивает прохождение силового гидравлического потока в первый домкрат 20, пока первый сигнал не станет равным первому целевому значению, соответствующему высоте h подъема рабочего орудия 9 при заранее установленной рабочей ширине. Когда путем воздействия на второй домкрат 22 изменяют расстояние d от рабочего орудия 9 до шасси 2, второй датчик 39 угла информирует в реальном времени вычислительное устройство 40 о действительном втором угле α2 между первой и второй частями 13 и 15 штанги 7. При этом на основании хранящегося в памяти правила и заданной величины регулирования вычислительное устройство 40 вычисляет новое первое целевое значение с целью адаптации первого угла α1 поворота первой части 13 штанги 7 к новой установленной рабочей ширине. В этой второй версии осуществления средства 27 автоматического регулирования предпочтительно содержат средство регулирования, позволяющее корректировать заданную величину регулирования. Это средство регулирования содержит, например, управляющий терминал, с которого пользователь может устанавливать заданную величину регулирования.
Несмотря на то, что первая и вторая версии осуществления были описаны в связи со штангой 7, находящейся спереди колес 6 и содержащей вторую часть 15, шарнирно соединенную с первой частью 13, эти две версии осуществления можно вполне транспонировать на штангу 8, находящуюся сзади колес 6. В дальнейшем тексте описания третья версия осуществления рассматривается как адаптация первой версии осуществления для этой штанги 8. Аналогично, четвертую версию осуществления следует рассматривать как адаптацию второй версии осуществления для этой штанги 8, расположенной сзади колес 6.
Третья версия осуществления отличается от первой в основном тем, что средство 29 угловой передачи с тягами/или тросами соединено со скользящей кареткой, входящей в состав второй части 17. Второй домкрат 22 шарнирно установлен между первой частью 13 штанги 8 и скользящей кареткой. Средство 29 угловой передачи действует на механический привод 34, с которым оно соединено. Конструкция и работа этого механического привода 34 идентичны описанным в первой версии осуществления. В этой третьей версии осуществления первый домкрат 20 предназначен для вертикального перемещения рабочего орудия 9, тогда как второй домкрат 22 предназначен для регулирования рабочей ширины. Для этого вторым домкратом 22 управляют таким образом, чтобы скользящую каретку отдалить или приблизить к первой поворотной оси 14 штанги 8 на шасси 2. Таким образом, рабочее орудие 9 оказывается на расстоянии d от шасси в пределах между минимальным и максимальным значениями. Это перемещение второй части 17 штанги 8 приводит к изменению второго расстояния, измеряемого между двумя соответствующими опорными точками первой и второй частей 13 и 17 штанги 8. Таким образом, это второе расстояние является входной физической величиной, характеризующей поперечное рабочее положение рабочего орудия 9, находящегося на расстоянии d от шасси в пределах между минимальным и максимальным значениями. На основании этой входной физической величины средство 28 преобразования передает через средство 29 угловой передачи управляющую величину в механизм 35 управления, выполненный в виде гидравлического вентиля, соединенного с первым домкратом 20. Взаимодействие механического привода 34 с вентилем по своему принципу идентично взаимодействию, описанному для первой версии осуществления. Увеличение установленной рабочей ширины при помощи второго домкрата 22 приводит к увеличению второго расстояния, используемого в качестве входной физической величины. В зависимости от значения этого второго расстояния механический привод 34 закрывает более или менее рано вентиль, когда рабочее орудие 9 перемещается из своего рабочего положения в поднятое положение. Таким образом, рабочее орудие 9 поднимается на высоту h, равную целевой высоте, зафиксированной заданной величиной регулирования, начиная, по меньшей мере, от двух поперечных рабочих положений рабочего орудия 9, в частности, от любого поперечного рабочего положения.
Четвертая версия осуществления отличается от второй в основном тем, что второе средство измерения содержит второй датчик расстояния, расположенный между скользящей кареткой второй части 17 и первой частью 13 штанги 8. При этом второй входной физической величиной является второе расстояние между этими частями 13 и 17. Передаточная функция второго средства 37 измерения связывает это второе измеренное расстояние с вторым электрическим сигналом. В зависимости от значения этого второго расстояния, конвертируемого вторым датчиком во второй электрический сигнал, передаваемый в вычислительное устройство 40, последнее на основании хранящегося в памяти отношения и заданной величины регулирования, имеющей в этом отношении определенное значение, определяет, на какой угол следует повернуть вверх первую часть 13 штанги 8, когда рабочее орудие 9 перемещают из его рабочего положения в поднятое положение, совпадающее с целевой высотой, соответствующей заданной величине регулирования. Когда путем приведения в действие второго домкрата 22 изменяют расстояние d рабочего орудия 9 до шасси 2, второй датчик информирует в реальном времени вычислительное устройство 40 о действительном втором расстоянии между первой и второй частями 13 и 17 штанги 8. При этом на основании хранящегося в памяти правила и заданной величины регулирования вычислительное устройство 40 вычисляет новое первое целевое значение для первого сигнала с целью адаптации угла поворота первой части 13 штанги 8 к установленной новой рабочей ширине.
Другие версии осуществления средств 27 автоматического регулирования могут предусматривать только одну входную физическую величину, характеризующую положение первой части 13 штанги 7, 8 относительно шасси 2. Первую, вторую и третью версии осуществления можно изменить таким образом, чтобы вторая входная физическая величина характеризовала положение второй части 15, 17 штанги 7, 8 относительно шасси 2.
В целом, входная физическая величина средства 28 преобразования может быть линейным или угловым расстоянием между частями 13, 15, 17 штанги 7, 8 или между частью 13, 15, 17 штанги 7, 8 и шасси 2, или измеренным наклоном части 13, 15, 17 штанги 7, 8 относительно земли. Соответствующее средство измерения может представлять собой датчик угла, датчик расстояния или измеритель угла наклона. Во второй версии осуществления вместо второго датчика 39 угла второе средство 37 измерения может содержать второй датчик расстояния. В этом случае входная физическая величина является вторым расстоянием, измеряемым между двумя соответствующими опорными точками первой части 13 штанги 7 и второй части 15 штанги 7.
Вариант осуществления машины может предусматривать, чтобы управляющая величина поступала в механизм 35, 41 управления, управляемый на открывание и на закрывание и соединенный с вторым приводным устройством 21, и чтобы механизм 35, 41 управления обеспечивал подачу силового потока во второе приводное устройство 21, пока значение управляющей величины не достигнет целевого значения. В этом случае средство 28 преобразования согласно первой версии осуществления можно изменить таким образом, чтобы средство 29 угловой передачи действовало на механический привод 34, положение которого можно использовать в качестве управляющей величины для вентиля, образующего механизм 35 управления и соединенного с вторым приводным устройством 21. Средство 28 преобразования согласно второй версии осуществления можно изменить таким образом, чтобы вычислительное устройство 40 запоминало заданную величину регулирования, принимало в реальном времени первый и второй сигналы и выдавало в реальном времени управляющую величину для управления вторым приводным устройством 21.
Другие, более или менее усовершенствованные варианты осуществления машины 1 могут предусматривать, чтобы на основании одной или нескольких входных физических величин, характеризующих поперечное рабочее положение рабочего орудия 9, находящегося на расстоянии d от шасси 2 в пределах между минимальным и максимальным значениями, средство 28 преобразования выдавало несколько управляющих величин для последовательного или одновременного управления первьм и вторым приводными устройствами 19 и 21. В этом случае каждая управляющая величина поступает в соответствующий механизм 35, 41 управления, управляемый на открывание и на закрывание и соединенный с первым, соответственно с вторым приводными устройствами 19, 21. При этом каждый соответствующий механизм 35, 41 управления обеспечивает подачу силового потока в первое, соответственно во второе приводные устройства 19, 21, пока значение соответствующей управляющей величины не достигнет соответствующего целевого значения. В этом случае отношение связывает целевые значения управляющих величин с значениями, принимаемыми входными физическими величинами, с заданной величиной регулирования, с размерными параметрами штанги 7, 8 и/или средства 28 преобразования и с параметрами расположения первой части 13 штанги 7, 8 на шасси 2. При этом средство 28 преобразования, аналогичное средству 28 преобразования из второй или из четвертой версий осуществления, выполнено таким образом, что вычислительное устройство 40 запоминает заданную величину регулирования, принимает в реальном времени первый и второй сигналы и выдает в реальном времени управляющие величины для управления первым и вторым приводными устройствами 19 и 21. На основании хранящегося в его памяти правила и запоминаемой им заданной величины регулирования это вычислительное устройство 40 определяет первое целевое значение для первого сигнала и второе целевое значение для второго сигнала. Для этого, кроме компаратора в соответствии с второй версией осуществления это вычислительное устройство 40 содержит также второй компаратор. Этот второй компаратор выдает второй сигнал сравнения, зависящий от отклонения между вторым целевым значением и значением, принимаемым вторым сигналом. При этом вычислительное устройство 40 определяет значение каждой управляющей величины в зависимости от значения, принимаемого первым сигналом сравнения, и от значения, принимаемого вторым сигналом сравнения.
Средство 28 преобразования из первой или третьей версии осуществления можно изменить таким образом, чтобы его средство 29 угловой передачи с тягами и/или тросами было шарнирно соединено со второй частью 15, 17 штанги 7, 8 и с шасси 2.
Средство 28 преобразования согласно второй версии осуществления можно изменить таким образом, чтобы второе средство 37 измерения выдавало второй сигнал, отображающий вторую входную физическую величину, характеризующую положение второй части 15 штанги 7 относительно шасси 2. Так, вторая входная физическая величина может быть вторым углом, который образует вторая часть 15 штанги 7 относительно шасси 2. Второе средство 37 измерения может также содержать второй датчик расстояния, например, расположенный между первой и второй частями 13 и 15 штанги 7. При этом вторая входная физическая величина является вторым измеренным расстоянием между двумя соответствующими опорными точками первой части 13 штанги 8 и второй части 15 штанги 7.
Вместо гидравлических домкратов в заявленной машине 1 можно использовать электрические приводы, связанные с электрическими выключателями вместо вентиля или вентилей или электровентилей.
Разумеется, изобретение не ограничивается вариантами и версиями осуществления, описанными выше и представленными на фигурах. В него можно вносить изменения, в частности, что касается состава, расположения или числа различных элементов, путем применения различных комбинаций вышеуказанных отличительных признаков или путем замены техническими эквивалентами, не выходя при этом за рамки объема защиты изобретения.
Реферат
Изобретение относится к сельскохозяйственному машиностроению. Сеноуборочная машина с автоматическим регулированием высоты подъема включает штангу, содержащую первую и вторую части. Первая часть штанги шарнирно соединена с шасси. Вторая часть штанги шарнирно соединена с первой частью и несет рабочее орудие. Сеноуборочная машина содержит также первое приводное устройство, соединенное с первой частью штанги, и второе приводное устройство, соединенное со второй частью штанги. Одно из приводных устройств выполнено управляемым для регулирования расстояния, измеренного поперечно к направлению движения сельскохозяйственной машины. Другое приводное устройство выполнено управляемым для вертикального перемещения рабочего орудия между рабочим положением и поднятым положением, в котором рабочее орудие находится на определенной высоте над землей. Сеноуборочная машина включает средства автоматического регулирования положения одного из первого и второго приводных устройств по заданной величине регулирования, что обеспечивает оптимальный подъем рабочего орудия относительно земли. 23 з.п. ф-лы, 3 ил.
Формула
Документы, цитированные в отчёте о поиске
Сеноворошилка
Комментарии