Фиксатор планшета для прецизионного манипулятора, предназначенного для работы с жидкостями - RU2270720C2
Код документа: RU2270720C2
Чертежи




Описание
Область применения изобретения
Данное изобретение относится к прецизионным манипуляторам, работающим с жидкостями и предназначенным для фармацевтических разработок, разработок лекарств и аналогичных лабораторных применений, а более конкретно - к фиксатору планшета, предназначенному для удержания и точного позиционирования луночных планшетов для проб в указанном манипуляторе.
Описание уровня техники
В лабораториях фармацевтических, геномных и протеомных исследований, в лабораториях по разработке медикаментов, а также в других прикладных задачах биотехнологии используются автоматизированные манипуляторы, работающие с жидкостями и предназначенные для манипуляций с лабораторными пробами во многих лабораторных процедурах. Например, манипуляторы, предназначенные для работы с жидкостями, используются при биотехнологических и фармацевтических процедурах анализа жидкостей, приготовлении проб, распределении смесей, обработке микромассивов и т.п. Автоматизированные манипуляторы для жидкостей имеют рабочее основание, поддерживающее массив резервуаров с пробами. Широко используются неразъемные планшеты для размещения проб, которые имеют выполненный с ними за одно целое массив из множества резервуаров или лунок для размещения проб. Обычный манипулятор, предназначенный для работы с жидкостями, имеет зонд или множество зондов, которые перемещаются в соосное положение, по меньшей мере, с одной лункой для проведения операций по манипулированию с жидкостью, таких как добавление жидкости в лунки.
Желательно снижать объемы проб, обрабатываемых посредством автоматизированных манипуляторов для работы с жидкостями. До сих пор находят широкое применение планшеты для размещения проб, располагающие посадочной зоной около трех с половиной на пять дюймов (8,89 см на 12,7 см) и имеющие двухкоординатный (X-Y) массив из 96 лунок с конфигурацией лунок восемь на двенадцать. Для увеличения производительности и уменьшения расхода компонентов проб такие планшеты заменяют микропланшетами с такой же посадочной зоной, но имеющими массив с более маленькими лунками, например, 384 лунки в массиве шестнадцать на двадцать четыре. Указанная тенденция продолжается, и поэтому существует потребность в автоматизированном манипуляторе для работы с жидкостями, приспособленном для размещения планшетов для микротитрования, имеющих очень плотный массив с очень большим количеством лунок очень маленького объема, предназначенных для проб, объем которых находится в нанолитровом диапазоне. Например, некоторые применяемые в настоящее время планшеты для микротитрования имеют такой же размер посадочной зоны, как и ранее использовавшиеся планшеты, но при этом они имеют 1536 лунок с массивом тридцать две лунки на сорок восемь.
Планшеты для микротитрования с плотным массивом маленьких близко расположенных лунок создают серьезные проблемы при использовании автоматизированного манипулятора, предназначенного для работы с жидкостями. При работе манипулятор должен быть достаточно точным для того, чтобы поместить каждый зонд из массива большого количества зондов в точное соосное положение с соответствующим количеством лунок для размещения проб. Так как размер лунок и расстояние между ними уменьшаются, то для автоматизированного манипулятора становится весьма проблематичным надежно размещать зонды, осуществляющие манипуляции с жидкостью, точно над выбранными лунками для размещения проб.
Допустимая погрешность для размещения планшетов и лунок на рабочем основании манипулятора и для позиционирования зондов относительно планшетов и лунок уменьшается по мере увеличения плотности массива лунок. Один из аспектов этой проблемы заключается в точном и согласованном позиционировании планшетов и лунок на рабочем основании. Некоторые методы, например, связанные с использованием настраиваемых вручную держателей или приспособлений для фиксации, позволяют точно размещать планшеты для размещения проб на рабочей поверхности, однако, система подобного типа требует высокой квалификации и внимательности оператора, большого числа точных ручных операций и чрезвычайно больших временных затрат на выверку основания планшетов для проведения обработки в манипуляторе, предназначенном для работы с жидкостями. Кроме того, такой тип системы не очень хорошо подходит для автоматизированного, роботизированного метода размещения планшетов на основании. Желательно создать фиксатор планшета, который можно было бы легко и быстро использовать, который не требовал бы высокой квалификации оператора, был приспособлен для роботизированного размещения, а также точно удерживал и позиционировал планшеты для размещения проб на рабочем основании манипулятора, предназначенного для работы с жидкостями.
Сущность изобретения
Основной целью данного изобретения является создание усовершенствованного фиксатора планшета, предназначенного для позиционирования и удержания планшетов для размещения проб на рабочем основании прецизионного манипулятора, предназначенного для работы с жидкостями. Другими целями является создание фиксатора планшета, обеспечивающего согласованное точное позиционирование планшетов, простого в эксплуатации и не требующего высокой квалификации и тщательности при помещении планшетов на рабочее основание, подходящего для роботизированного размещения планшетов на рабочем основании и являющегося несложным и недорогим, а также надежным и прочным.
Вкратце, в соответствии с данным изобретением предложен фиксатор планшета, предназначенный для позиционирования и удержания четырехстороннего планшета (например, микропланшета), имеющего массив лунок для размещения проб, на рабочем основании прецизионного манипулятора, предназначенного для работы с жидкостями и содержащего по меньшей мере один зонд, предназначенный для точного совмещения по меньшей мере с одной лункой планшета. Устройство фиксации планшета содержит плоское ровное основание, предназначенное для закрепления на рабочем основании указанного манипулятора. Гнездо для размещения планшета, расположенное на основании фиксатора, имеет четыре стороны, соответствующие четырем сторонам четырехстороннего планшета. Гнездо содержит неподвижные стопорные элементы, проходящие вверх от основания на первой и второй сторонах гнезда, и подвижные держатели, проходящие вверх от основания на третьей и четвертой сторонах гнезда напротив неподвижных стопорных элементов, расположенных на первой и второй сторонах гнезда. Между основанием и каждым из подвижных держателей имеются упругие смещающие элементы, предназначенные для толкания держателей к центру гнезда.
Более подробно, предложен фиксатор планшета, содержащий основание фиксатора в виде панели, по меньшей мере одно гнездо для размещения четырехстороннего планшета, расположенное на основании фиксатора и ограниченное неподвижными стопорными элементами и подвижными держателями, проходящими вверх от указанного основания, причем расстояние между неподвижными стопорными элементами и подвижными держателями меньше ширины плиты четырехстороннего планшета, и смещающие элементы, размещенные на подвижных держателях для обеспечения возможности перемещения подвижных держателей при помещении планшета в гнездо.
Основание фиксатора может быть выполнено с возможностью крепления к рабочему основанию прецизионного манипулятора, предназначенного для работы с жидкостями.
Фиксатор планшета может дополнительно содержать углубления для доступа, расположенные в основании фиксатора смежно с гнездом для размещения планшета.
Смещающий элемент предпочтительно содержит пружину.
Неподвижные стопорные элементы предпочтительно проходят вверх от основания фиксатора на первой и второй сторонах гнезда для размещения планшета, а подвижные держатели проходят вверх от основания фиксатора на третьей и четвертой сторонах гнезда для размещения планшета напротив неподвижных стопорных элементов. В этом случае фиксатор планшета может содержать три неподвижных стопорных элемента и два подвижных держателя. При этом подвижные держатели могут быть расположены вблизи первого угла, где пересекаются третья и четвертая стороны, а два из трех неподвижных стопорных элементов могут быть расположены вблизи второго угла напротив первого угла.
Неподвижные стопорные элементы и подвижные держатели предпочтительно имеют верхние конические направляющие части.
Неподвижные стопорные элементы предпочтительно содержат стопорные стойки, а подвижные держатели содержат смещающие стойки. В этом случае фиксатор планшета может дополнительно содержать стержень, прикрепленный к основанию фиксатора для каждой смещающей стойки, при этом смещающая стойка имеет центральную полость для размещения стержня, причем стержень и смещающая стойка ограничивают кольцевую камеру для размещения пружины. Пружина может состоять из навитой по кольцу пружины с витками, проходящими вокруг круговой оси.
Фиксатор планшета может дополнительно содержать узел промывки зондов. Фиксатор планшета может дополнительно содержать трубки для фиксатора зондов.
Кроме того, предложен способ фиксации планшета, включающий помещение содержащего пробы планшета в фиксатор планшета, выполненный так, как описано выше.
Краткое описание чертежей
Данное изобретение, а также его цели и преимущества, как вышеуказанные, так и другие, будут более понятны из следующего подробного описания предпочтительного варианта выполнения изобретения, проиллюстрированного чертежами, на которых:
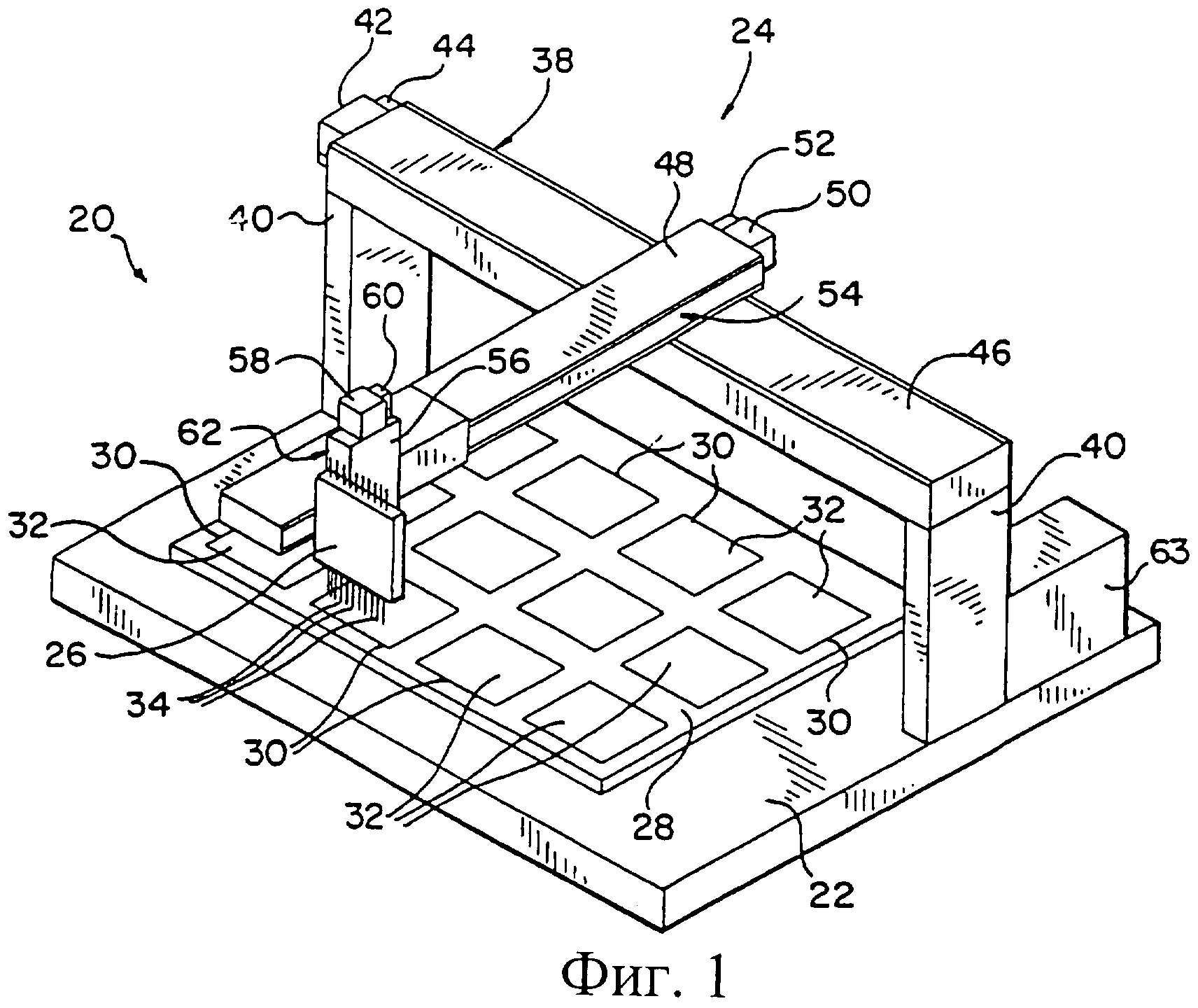
Фиг.1 изображает упрощенный схематичный вид в аксонометрии прецизионного автоматизированного манипулятора для работы с жидкостями, с которым применяется предложенный фиксатор планшета.
Фиг.2 изображает увеличенный частичный вид спереди каретки зондов, а также многочисленных зондов прецизионного манипулятора для работы с жидкостями, показанного на фиг.1, причем изображенные зонды точно совмещены с лунками микропланшета.
Фиг.3 изображает вид сверху рабочего основания показанного на фиг.1 прецизионного автоматизированного манипулятора для работы с жидкостями, содержащего массив планшетных гнезд, каждое из которых имеет фиксатор планшета, выполненный в соответствии с данным изобретением.
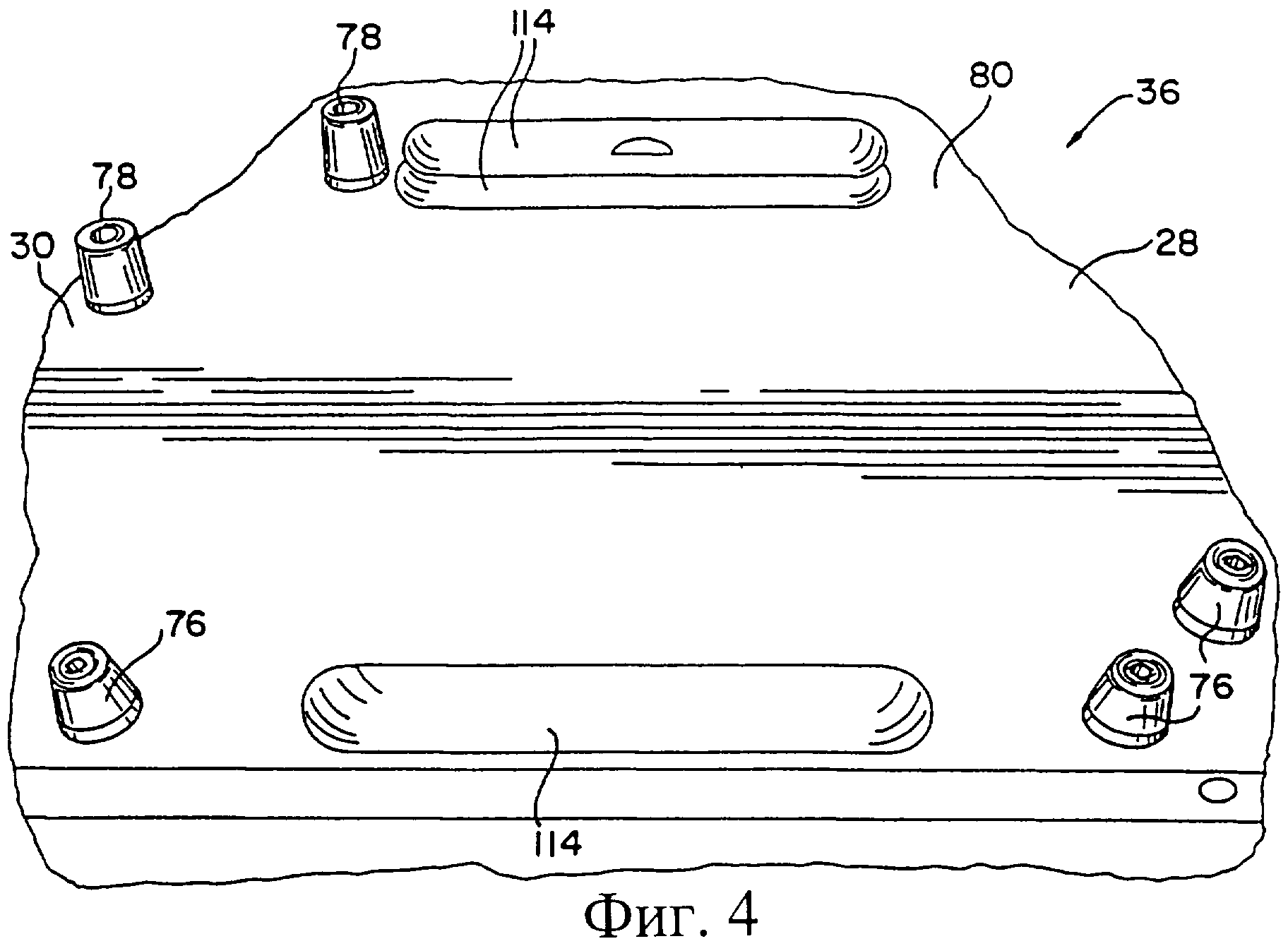
Фиг.4 изображает вид в аксонометрии сзади сверху одного планшетного гнезда рабочего основания, показанного на фиг.3, при этом гнездо показано пустым перед помещением в него планшета.
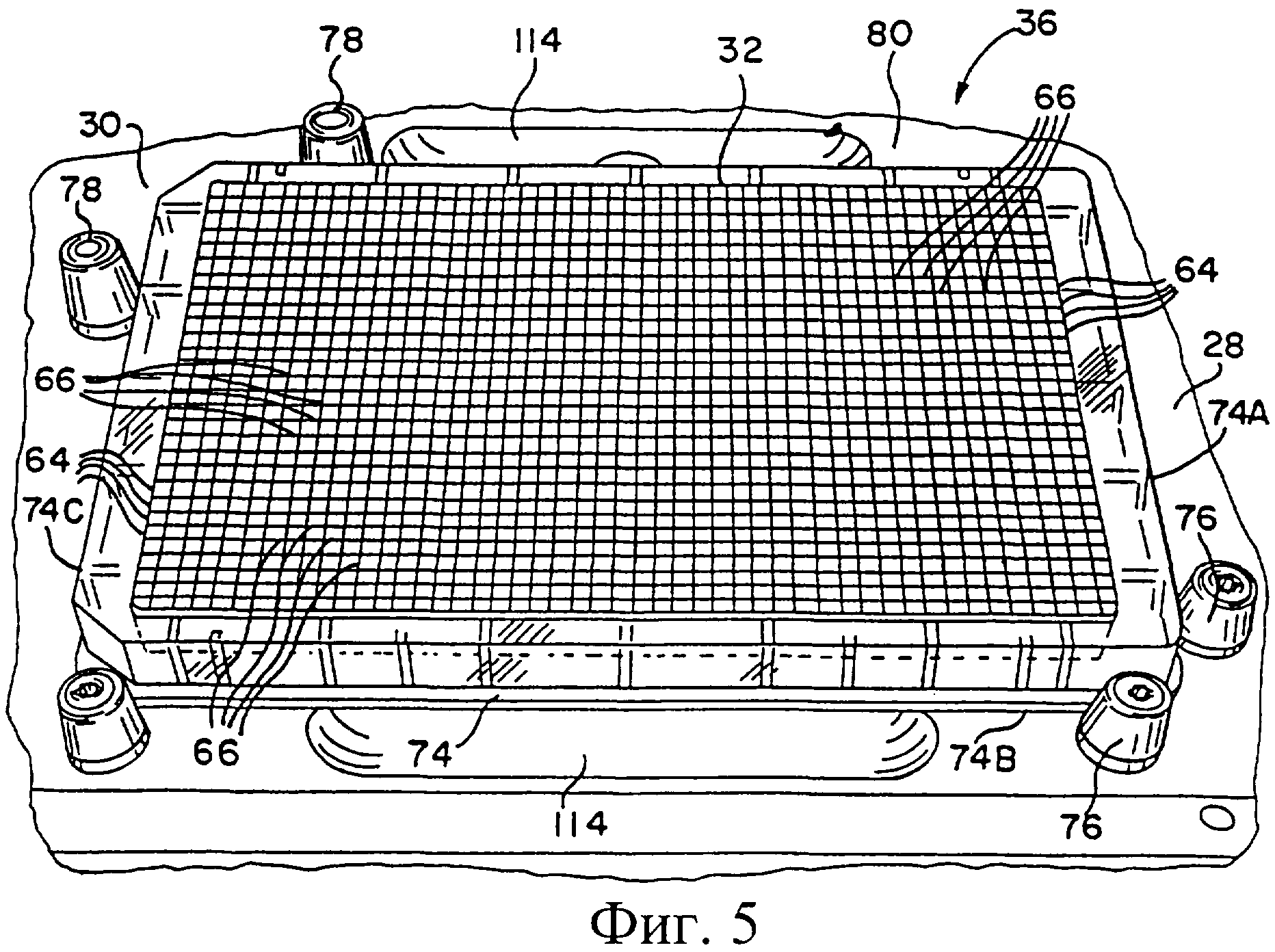
Фиг.5 изображает аналогичный фиг.4 вид, на котором гнездо показано с установленным планшетом.
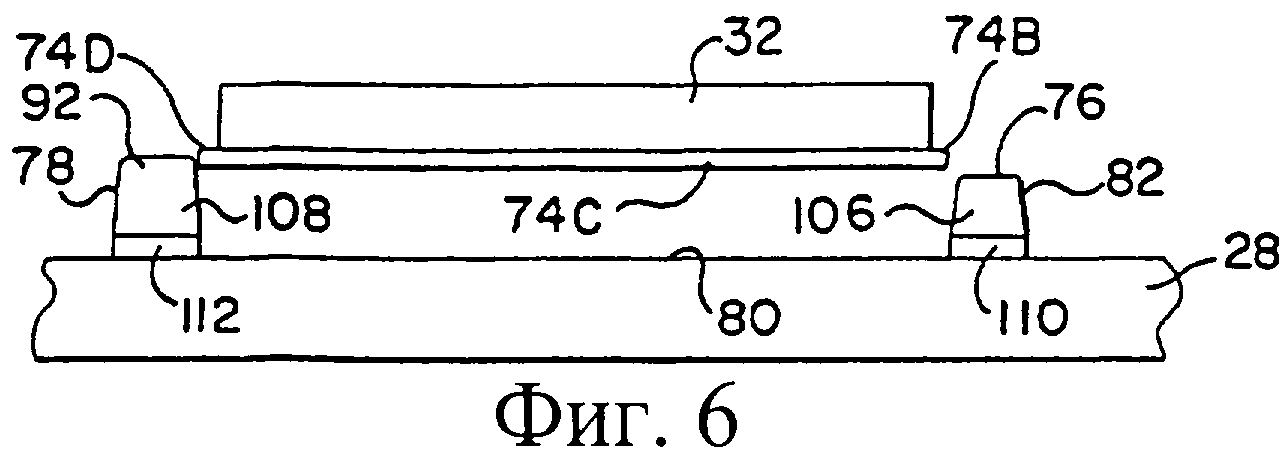
Фиг.6 изображает вид сбоку по линии 6-6 на фиг.3, на котором показаны планшет и части гнезда, причем планшет расположен над гнездом.
Фиг.7 изображает аналогичный фиг.6 вид, на котором планшет расположен в гнезде.
Фиг.8 изображает увеличенный разрез неподвижного стопорного элемента гнезда, выполненный по линии 8-8 на фиг.7.
Фиг.9 изображает увеличенный частичный разрез по линии 9-9 на фиг.3, который изображает гнездо и планшет в положении, в котором они показаны на фиг.6, при этом планшет расположен над гнездом.
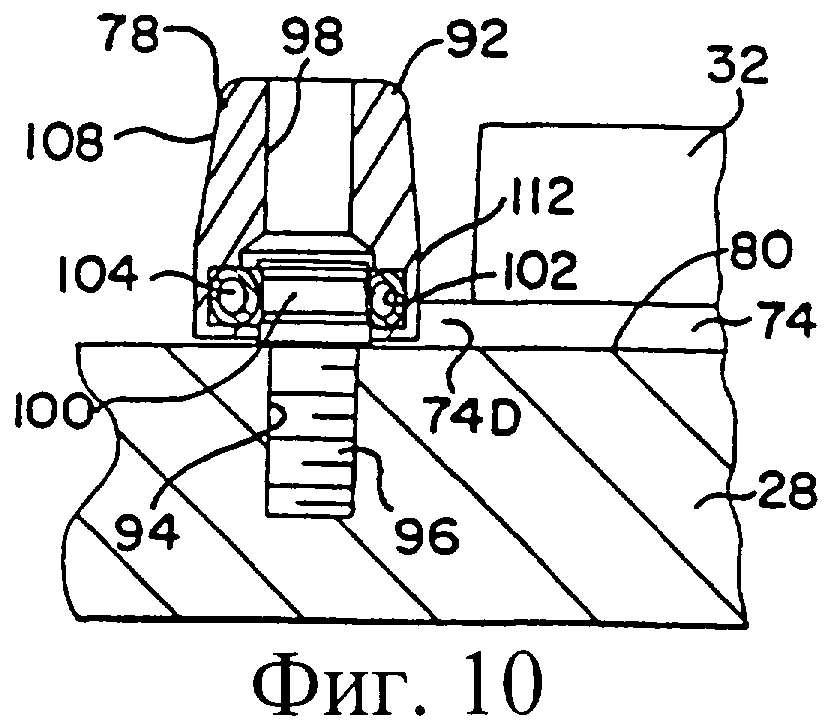
Фиг.10 изображает аналогичный фиг.9 вид, на котором планшет расположен в гнезде.
Фиг.11 изображает разрез подвижного держателя гнезда в разобранном виде.
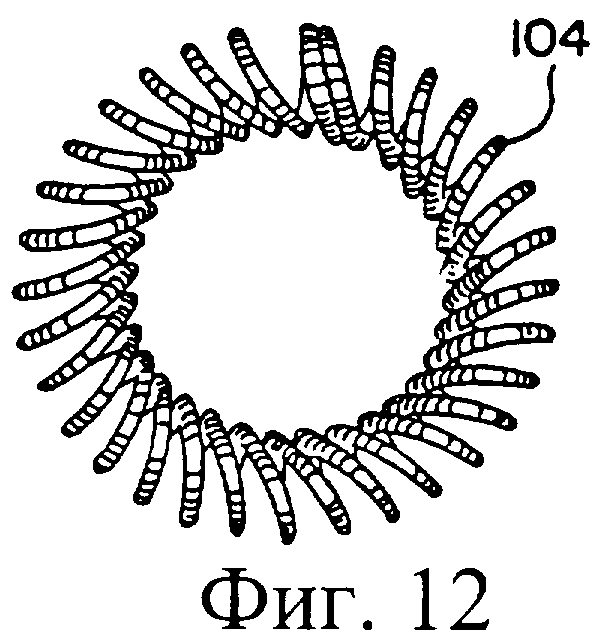
Фиг.12 изображает увеличенный вид сверху навитой по кольцу пружины подвижного держателя гнезда.
Подробное описание предпочтительных вариантов выполнения
Обратимся к чертежам и первоначально к фиг.1, на котором в упрощенном схематичном виде показан пример автоматизированного прецизионного манипулятора для работы с жидкостями, обозначенного в целом номером 20 позиции. Манипулятор 20 содержит настольное или рабочее основание 22, расположенное под системой 24 трехкоординатного (X-Y-Z) позиционирования, несущей держатель 26 зондов. Основание 28 фиксатора прикреплено к поверхности рабочего основания 22 и содержит гнезда 30, предназначенные для удержания планшетов 32 для размещения проб. Держатель 26 удерживает отдельные зонды 34, которые перемещаются системой 24 в предварительно заданные положения над планшетами 32. Как описано ниже, каждое гнездо 30 содержит устройство фиксации планшета, обозначенное в целом номером 36 позиции и выполненное в соответствии с основными положениями данного изобретения.
Система 24 перемещает держатель 26 над основанием 22 и позиционирует его с большой точностью в предварительно заданные положения относительно основания 22. Система 24 содержит узел 38 перемещения по оси X, который установлен над основанием 22 и прикреплен к его задней части посредством соответствующих опор 40. Двигатель 42 перемещения по оси X, вместе с датчиком 44 положения, управляет механизмом в пределах плеча 46, расположенного по оси X, для перемещения плеча 48, расположенного по оси Y, из стороны в сторону в направлении оси X. Двигатель 50 перемещения по оси Y в составе узла 54 перемещения по оси Y управляет, вместе с датчиком 52 положения, механизмом в пределах плеча 48, расположенного по оси Y, для перемещения плеча 56, расположенного по оси Z, вперед и назад в направлении оси Y. Двигатель 58 перемещения по оси Z в составе узла 62 перемещения по оси Z, вместе с датчиком 60 положения, управляет механизмом в пределах плеча 56, расположенного по оси Z, для перемещения держателя 26 вниз и вверх в направлении оси Z. Программно-управляемый регулятор 63 подсоединен кабелями (не показаны) к двигателям 42, 50 и 58 и к датчикам 44, 52 и 60. Регулятор 63 может содержать операционную систему на основе микропроцессора, способную управлять перемещением держателя 26 в соответствии с макрокомандами, сохраненными в памяти регулятора и/или передаваемыми регулятору от удаленного источника. В качестве изображенных датчиков 44, 52 и 60 можно использовать линейные датчики положения.
В каждом устройстве 36 фиксации планшета расположен планшет 32, удерживаемый на рабочем основании 22. Этот планшет 32 включает массив из большого количества отдельных лунок для размещения проб и имеет посадочную зону около трех с половиной на пять дюймов (8,89 см на 12,7 см), причем известные планшеты могут иметь массив из 96 лунок, расположенный в двух координатах X-Y, с конфигурацией лунок восемь на двенадцать, или массив из 384 лунок меньшего размера с сеткой шестнадцать на двадцать четыре, или массив из 1536 лунок объемом, измеряемым в нанолитрах, при сетке лунок тридцать две на сорок восемь. Поперечный разрез планшета 32 данной последней конфигурации вместе с держателем 26, несущим двенадцать отдельных зондов 34, показан на фиг.2. Этот планшет 32 содержит тридцать два ряда 64 лунок, каждый из которых имеет сорок восемь лунок 66 для размещения проб и один из которых показан на фиг.2. Каждая лунка 66 имеет ширину 1,2 мм, а расстояние между центрами лунок составляет 2,25 мм. Диаметр каждого зонда 34 равен 1,1 мм, а расстояние между центрами зондов равно 9 мм, или пяти лункам.
Каждый зонд 34 может выпускать жидкость каплями размером 0,2 мм. Держатель 26 перемещают в показанное на фиг.2 положение для распределения жидкости в двенадцать лунок 66, которые установлены соосно под зондами 34. Затем держатель 26 перемещают системой 24 для совмещения зондов 34 с другим набором лунок 66. Таким образом в некоторые или во все лунки 66 планшета 32, а также в некоторые или во все планшеты 32 может быть подана жидкость. Из-за малого размера лунок и расстояния между ними, а также малого размера зондов и расстояния между ними, требуется повышенная точность. Для совмещения системой трехкоординатного позиционирования зондов 34 с лунками 66 необходимо точно задавать положения лунок 66 и, соответственно, положения планшетов 32. Что и достигается благодаря предложенному фиксатору 36 планшета.
На фиг.3 показано основание 28 фиксатора, которое в предпочтительном случае представляет собой толстую прочную металлическую панель, например алюминиевую, прикрепленную к рабочему основанию 32 манипулятора 20 в трех точках 68 выравнивания по уровню и фиксации, вследствие чего основание 28 фиксатора может быть точно выверено на рабочем основании 22 и закреплено. Основание 28 имеет узел 70 промывки зондов, а также выемки для фиксатора зондов или трубки 72, которые можно использовать для определения местоположения зондов при задании начальных условий работы системы 24 позиционирования. Основание 28 фиксатора также содержит двенадцать лотковых гнезд 30 с конфигурацией гнезд три на четыре. Каждое гнездо 30 содержит устройство 36 фиксации планшета, удерживающее планшет 32. Каждый планшет 32, как показано на фиг.2, может представлять собой планшет для микротитрования на 1536 лунок, или может иметь другую конфигурацию. Независимо от размера лунки и конфигурации каждый планшет имеет четырехстороннюю плиту 74 соответственного известного размера и формы.
Гнездо 30 и его устройство 36 более подробно показаны на фиг.4 и 5. Устройство 36 содержит неподвижные стопорные элементы 76, выполненные с возможностью взаимодействия с двумя сторонами 74А и 74В четырехсторонней лотковой плиты 74, и подвижные держатели 78, расположенные у остальных двух сторон 74С и 74D. При помещении планшета 32 в гнездо 30 подвижные держатели 78 соприкасаются со сторонами 74С и 74D и смещаются в наружном направлении с обеспечением перемещения плиты 74 вниз до тех пор, пока она не окажется на верхней поверхности 80 основания 28. В таком вставленном положении стороны 74А и 74В находятся во взаимодействии с неподвижными стопорными элементами 76. Эти элементы 76 прикреплены к основанию 28 в известном месте, и они определяют местоположение планшета 32, поскольку они касаются двух сторон плиты 74. В результате, когда планшет 32 расположен в гнезде 30, он находится в точно закрепленном и известном положении, а к лункам 66 может обеспечиваться надлежащий доступ посредством системы 24 и зондов 34.
Неподвижные стопорные элементы 76 представляют собой стопорные стойки 82, одна из которых подробно показана на фиг.8. В точно заданном положении на верхней поверхности 80 выполнено резьбовое отверстие 84, которое имеет верхнюю коническую часть 86. Стойка 82 имеет центральное отверстие 88 и коническое основание 90, согласованное по форме с частью 86 отверстия. Основание 90 расположено в части 86 отверстия и тем самым задает местоположение стойки 82 на поверхности 80. Винт 92 с головкой, расположенный в отверстии 88, завинчен в это отверстие 88 для крепления стойки 82 на месте. Стойка 82 является симметричной относительно своей центральной оси, имеет круглое поперечное сечение по всей своей длине и может быть установлена в любом поворотном положении.
Подвижные держатели 78 представляют собой смещающие стойки 92, подробно показанные на фиг.9-11. Для каждой стойки 92 на верхней поверхности 80 выполнено резьбовое отверстие 94 в точно заданном месте. В отверстие 96 завинчен стержень 96, а стойка 92 расположена на стержне 96, помещенном в центральное отверстие 98 в стойке 92. Стержень 96 и стойка 92 симметричны относительно своих центральных осей, имеют круглые поперечные сечения по всей своей длине и могут быть установлены в любом поворотном положении.
Смежные каналы 100 и 102 в стержне 96 и во внутренней части стойки 92 ограничивают камеру для пружины, в которой расположена навитая по кольцу пружина 104. Эта пружина 104 представляет собой свитую из проволоки винтовую пружину кольцевой формы, аналогичной форме канала для размещения пружины, причем отдельные витки пружины проходят вокруг ее круговой оси. Пружина 104 упруго поджимает стойку 92 в центральное положение, в котором оси стержня 96 и стойки 92 совмещены, и обеспечивает возможность смещения стойки 92 в сторону от этого центрального положения, сохраняя действующее на стойку 92 возвращающее усилие обратного хода.
Фиг.6 иллюстрирует введение планшета 32 в гнездо 30. Стопорная стойка 82 имеет наклонную коническую верхнюю часть 106, а стойка 92 имеет наклонную коническую верхнюю часть 108. Поверхности 106 и 108 встречаются с плитой 74 планшета 32 и направляют ее во время ее перемещения вниз к поверхности 80. Поверхность 108 действует как кулачок, и опускающаяся плита 74 выталкивает смещающую стойку 92 в наружном направлении, действуя против усилия пружины 104. Стопорная стойка 82 имеет цилиндрическую нижнюю часть 110, непосредственно прилегающую к поверхности 80, а смещающая стойка 92 имеет цилиндрическую нижнюю часть 112, непосредственно прилегающую к поверхности 80. В то время, когда плита 74 достигает положения покоя на поверхности 80, края плиты (т.е. края 74В и 74D, показанные на фиг.7) входят в соприкосновение с этими цилиндрическими поверхностями 110 и 112, и при этом отсутствует тенденция к подъему плиты от поверхности 80.
При нахождении стоек 82 и 92 в начальном положении расстояние между цилиндрическими частями 110 и 112 немного меньше, чем длина плиты 74 планшета 32. При сравнении фиг.9 и 10 можно видеть, что при нахождении планшета 32 в положении покоя, в котором он помещен в гнездо до конца, пружина 104 сжата на участке радиальной линии, проходящей через точку контакта стойки 92 с плитой 74. Возникающая сила упругости, прикладываемая стойкой 92 к плите 74, удерживает последнюю плотно прижатой к стопорной стойке или стойкам 82, расположенным с противоположной стороны плиты 74. Следовательно, система из стопорных стоек 82 и смещающих стоек 92 направляет опускающийся планшет 32 в требуемое положение, а кроме того точно задает положение планшета 32, в котором он помещен в гнездо.
Каждое гнездо 30 содержит три стопорные стойки 82 и две смещающие стойки 92 (фиг.3-5). Две стопорные стойки 82 расположены вблизи противоположных концов одной из больших сторон 74В плиты 74. Третья стопорная стойка расположена у смежной стороны 74А вблизи угла со стороной 74В. Эти три стойки задают однозначное, определенное положение планшета 32, удерживаемого в гнезде. Когда плита 74 соприкасается с тремя стопорными стойками 82, вращение или отклонение планшета 32 из определенного положения не происходит. Две смещающие стойки 92 расположены на двух сторонах 74С и 74D, которые находятся напротив сторон 74А и 74D, взаимодействующих со стойками 82. Эти две смещающие стойки 92 оказывают воздействия в двух перпендикулярных направлениях для прочного прижима плиты 74 к трем стопорным стойкам 82. Таким образом создано несложное устройство, которое не является дорогостоящим при изготовлении и сборке.
Для того чтобы поместить планшет 32 в гнездо, где он удерживается в точном известном положении, не требуется специальной квалификации или внимательности. Кроме того, планшет можно извлечь простым поднимающим движением, поскольку он не защелкивается и не запирается в рабочем положении каким-либо приспособлением, входящим в сцепление с его верхней поверхностью. Предложенное устройство 36 фиксации планшета хорошо подходит для роботизированного размещения и удаления планшетов, поскольку окончательное позиционирование планшета производится устройством 36 фиксации планшета, связанным с основанием 28, а не с человеком или машиной, которые помещают лоток на поверхность 80. Для облегчения роботизированного размещения планшетов и их удаления каждое гнездо 30 на поверхности 80 имеет противоположные углубления 114, расположенные на противоположных сторонах гнезда. Углубления 114 обеспечивают зазор для захвата краев плиты 74.
Хотя данное изобретение описано со ссылкой на элементы показанного на чертежах варианта выполнения, из приложенной формулы изобретения следует, что указанные элементы не ограничивают объем его правовой охраны.
Реферат
Группа изобретений относится к прецизионным манипуляторам, работающим с жидкостями и предназначенным для фармацевтических разработок, разработок лекарств и аналогичных лабораторных применений, а более конкретно - к фиксатору планшета, предназначенному для удержания и точного позиционирования луночных планшетов для проб в указанном манипуляторе, и к способу фиксации планшета. Фиксатор планшета содержит основание фиксатора в виде панели, по меньшей мере одно гнездо для размещения четырехстороннего планшета, расположенное на основании фиксатора и ограниченное неподвижными стопорными элементами и подвижными держателями, проходящими вверх от указанного основания, причем расстояние между неподвижными стопорными элементами и подвижными держателями меньше ширины плиты четырехстороннего планшета, и смещающие элементы, размещенные на подвижных держателях для обеспечения возможности перемещения подвижных держателей при помещении планшета в гнездо. Представлен способ фиксации планшета. Достигается упрощение эксплуатации и ускорение фиксации. 2 н. и 12 з.п. ф-лы, 12 ил.
Комментарии