Сельскохозяйственная уборочная машина - RU2727648C2
Код документа: RU2727648C2
Чертежи
Описание
Область техники
Изобретение относится к сельскохозяйственной уборочной машине с признаками, раскрытыми в ограничительной части пункта 1 формулы изобретения.
Уровень техники
Под сельскохозяйственной уборочной машиной в смысле изобретения понимают любую уборочную машину, оснащенную жаткой, выполненной в качестве навесного уборочного агрегата и предназначенной для срезания и сбора убираемой культуры. При этом речь может идти о зерноуборочном комбайне, кормоуборочном комбайне, пресс-подборщике и т.п. В предлагаемом описании в первую очередь рассматривается уборочная машина, выполненная в виде зерноуборочного комбайна.
Рассматриваемую сельскохозяйственную уборочную машину можно периодически адаптировать к уборке различных культур, устанавливая на нее различные навесные уборочные агрегаты. В случае зерноуборочного комбайна навесной уборочный агрегат, в частности, жатка, содержит, по меньшей мере, одно мотовило, платформу, установленный на платформе ножевой брус и втягивающий шнек, подающий срезанную культуру на наклонный транспортер комбайна. По меньшей мере, часть этих компонентов соединена с приводами, позволяющими настраивать соответствующие параметры жатки, например, «Высота ножевого бруса», «Угол срезания», «Длина платформы», «Положение мотовила», «Частота вращения втягивающего шнека», «Частота вращения мотовила» или «Частота срезания».
В процессе уборки урожая мотовило направляет убираемую культуру через ножевой брус, срезающий ее. Срезанная культура попадает на платформу, с которой транспортируется втягивающим шнеком на наклонный транспортер. В центральной части втягивающего шнека срезанная культура передается на наклонный транспортер. Для этого в центральной части втягивающего шнека предусмотрены подающие пальцы, которые по команде управляющего устройства выдвигаются из шнека для захвата срезанной культуры и последующего направления этой культуры на наклонный транспортер. Подобное устройство описано, например, в патентной заявке DE 7826143 U1. В данном случае на основании вращения валков можно регулировать угол, под которым подающие пальцы выходят из втягивающего шнека. Таким образом, появляется дополнительный регулируемый параметр жатки «угол выдвижения подающих пальцев».
Оптимальная настройка параметров жатки имеет большое значение не только для срезания и захвата, но и для всех последующих процессов. Для зерноуборочного комбайна под такими последующими процессами понимают, в частности, обмолот, сепарацию и очистку.
Существует целый ряд критериев, по которым можно судить о качестве работы жатки. Прежде всего, речь идет о максимально возможном снижении потерь на самой жатке. Под такими потерями, возникающими непосредственно на жатке, понимают, например, «потери при захвате», «потери колосьев при срезании», «потери зерна при разбросе» и т.п. Кроме того, настройка параметров жатки влияет на вышеупомянутые последующие процессы, для зерноуборочного комбайна это обмолот, сепарация и очистка. Уже по количеству параметров жатки становится понятно, что оптимальная настройка параметров жатки представляет собой задачу высокого уровня сложности.
В известной сельскохозяйственной уборочной машине (DE 102008032191 А1), на которой основано изобретение, предусмотрена система помощи водителю, управляющая, в том числе, жаткой. Система помощи водителю обеспечивает равномерный поток убранный культуры путем определения различных параметров жатки на основании данных, полученных от датчика потока убранной культуры. Однако подобная оптимизация жестко ориентирована на взаимосвязи, преобладающие в самой жатке. Подобная жестко ориентированная оптимизация описана в патентной заявке WO 2014/093814 А1, описывающей кормоуборочный комбайн.
Раскрытие изобретения
Учитывая уровень техники, задачей настоящего изобретения является усовершенствование известной на уровне техники уборочной машины с системой помощи водителю таким образом, чтобы она обеспечивала всеобъемлющее и выгодное управление жаткой с минимальной нагрузкой на оператора.
Эту задачу решают уборочной машиной с признаками, раскрываемыми в ограничительной части пункта 1 формулы изобретения, при помощи признаков, раскрываемых в отличительной части пункта 1.
Существенное значение для изобретения имеет тот факт, что жатка вместе с системой помощи водителю образует автоматический режущий аппарат. Это означает, что систему помощи водителю оснащают запоминающим устройством, предназначенным для хранения данных, и вычислительным устройством, предназначенным для автономного определения отдельных параметров жатки и задания этих параметров для жатки. Эти параметры в дальнейшем называют «параметрами жатки». Основой для определения параметров жатки служит выбор пользователем стратегий процесса уборки, хранящихся в запоминающем устройстве системы помощи водителю.
Предлагаемое решение с помощью однократного выбора активной стратегии процесса уборки урожая оператором позволяет задавать вид и способ активизации жатки. Для определения параметров жатки в строгом смысле этого слова не требуется ввод дополнительных данных оператором. Тем не менее, оператор имеет возможность по желанию изменить выбранную стратегию процесса уборки урожая, в результате чего управление будет осуществляться по-прежнему автономно, но, возможно, с другими приоритетами. Предлагаемая реализация автоматического режущего аппарата, способного работать в рамках самых разнообразных стратегий процесса уборки урожая, открывает совершенно новые возможности влияния на процесс со стороны пользователя, не увеличивая сложность пользования системой.
В предпочтительном варианте исполнения изобретения согласно пункту 5 формулы, в запоминающее устройство системы помощи водителю записана функциональная модель системы, по меньшей мере, части уборочной машины, служащая основой для автономного определения по меньшей мере, одного параметра жатки. Под «функциональной моделью системы» понимают, что, по меньшей мере, часть функциональных взаимосвязей внутри уборочной машины выражается моделью системы. Ниже приведены примеры.
В другом следующем предпочтительном варианте исполнения изобретения согласно пункту 6 формулы вычислительное устройство сравнивает модель системы в ходе выполнения уборки урожая с текущим состоянием процесса уборки урожая. Идея заключается в адаптации модели системы, лежащей в основе автономного определения параметров жатки, к конкретным условиям.
Предпочтительно, параметры жатки во время процесса уборки урожая определяют циклически. Термин «циклически» в данном случае имеет широкое значение и означает непрерывное определение с постоянной или меняющейся длительностью цикла. Подобное циклическое определение, по меньшей мере, одного параметра жатки позволяет ускорить реагирование уборочной машины на изменения состояния уборочного процесса. Соответственно, в данном контексте также будет выгодно выполнять циклическое сравнение модели системы с текущим состоянием уборочного процесса, предложенное в пункте 6. При этом длительность цикла должна быть достаточно малой для того, чтобы достичь вышеупомянутой выгодной скорости реакции.
Предпочтительно, вычислительное устройство рекурсивно сравнивает модель системы с текущим состоянием уборочного процесса, что позволяет поэтапно приблизить модель системы к фактическим условиям. Под состоянием уборочного процесса понимают совокупность всех параметров, каким-либо образом связанных с процессом уборки урожая. К ним относится информация о высаженной на поле культуре и/или параметры уборочного процесса и/или параметры жатки и/или информация об окружающей среде (пункт 7 формулы).
В особенно предпочтительном варианте исполнения согласно пункту 8 формулы предусмотрено сенсорное устройство для определения, по меньшей мере, части состояния уборочного процесса. Это позволяет, в частности, особенно легко реализовать вышеупомянутое циклическое сравнение модели системы.
В следующем предпочтительном варианте исполнения согласно пункту 9 формулы, по меньшей мере, часть состояния уборочного процесса можно ввести через устройство ввода / вывода. Это позволяет перепроверять показания датчиков или определять параметры, с трудом поддающиеся регистрации датчиками.
В следующем предпочтительном варианте исполнения согласно пункту 10 формулы в запоминающем устройстве системы помощи водителю хранится, по меньшей мере, одна начальная модель, которая может служить начальным значением, в частности, для вышеуказанной непрерывной корректировки модели системы. Правильный выбор исходной модели позволяет всего за несколько циклов корректировки достичь достаточного соответствия модели системы с фактическими обстоятельствами.
Для визуализации функциональных взаимосвязей с помощью модели системы, предпочтительно, согласно пункту 13 формулы, по меньшей мере, с одним параметром уборочного процесса связано поле характеристик, причем параметр уборочного процесса является выходным параметром соответствующего поля характеристик. Вышеуказанное поле характеристик позволяет отображать даже сложные функциональные взаимосвязи с низкими затратами вычислительных мощностей. В частности, можно реализовать с относительно небольшими затратами вычислительных мощностей вышеупомянутое, в частности, рекурсивное сравнение модели системы.
Вышеуказанное поле характеристик здесь и, предпочтительно, в целом отражает зависимость выходного параметра от, по меньшей мере, одного входного параметра, в частности, двух или более входных параметров.
В смысле вышеуказанного сравнения модели системы с фактическим состоянием уборочного процесса, согласно пункту 16 формулы, вычислительное устройство во время процесса уборки урожая сравнивает, предпочтительно, циклически, по меньшей мере, одно поле характеристик с фактическим состоянием уборочного процесса. Для реализации такого сравнения, предпочтительно, повторно измеряют несколько точек в пределах поля характеристик с помощью сенсорного устройства. Отклонение измеренных точек от соответствующих точек модели системы приводит к соответствующей корректировке, по меньшей мере, одного поля характеристик.
Для реализации соответствующей выбранной стратегии уборки урожая на основании модели системы, согласно пункту 17 формулы, в запоминающее устройство записывают, по меньшей мере, одно правило реализации. Примером такого правила реализации служит определение, по меньшей мере, одного параметра жатки в режиме управления без внешних воздействий. В простейшем случае вычислительное устройство определяет, по меньшей мере, один параметр жатки как распределение на основании, по меньшей мере, одного вышеуказанного поля характеристик. При определении, по меньшей мере, одного параметра жатки можно обойтись без сложных процессов регулирования с соответствующей обратной связью.
В следующем предпочтительном варианте исполнения согласно пункту 20 формулы применяют правило реализации, заключающееся в применении многоцелевой оптимизации с целью одновременной реализации конкурирующих стратегий уборочных процессов.
Наконец, следующее предпочтительное правило реализации согласно пункту 21 заключается в определении предварительных условий, на основании которых вычислительное устройство расставляет приоритеты между различными аспектами. В контексте многоцелевой оптимизации определение предварительных условий позволяет эффективно определять параметры жатки.
Прочие предпочтительные правила реализации, относящиеся к настройке или оптимизации отдельных предпочтительных параметров уборочного процесса раскрываются в пунктах 22-24 формулы.
Краткое описание чертежей
Прочие детали, признаки, цели и преимущества предлагаемого изобретения следуют из приведенного ниже описания предпочтительных вариантов исполнения с учетом прилагаемых фигур, на которых изображено:
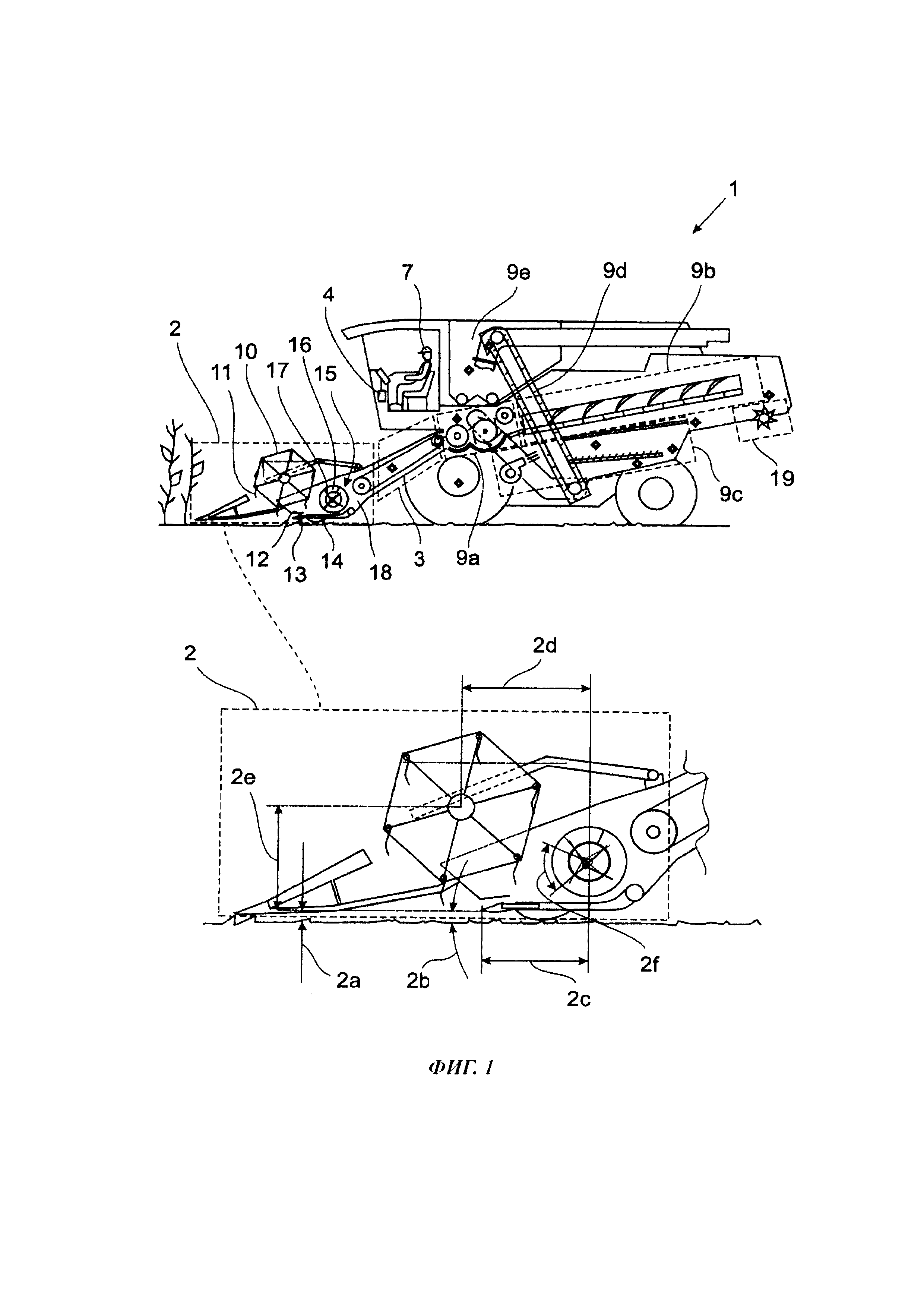
Фигура 1: вид сбоку предлагаемой уборочной машины.
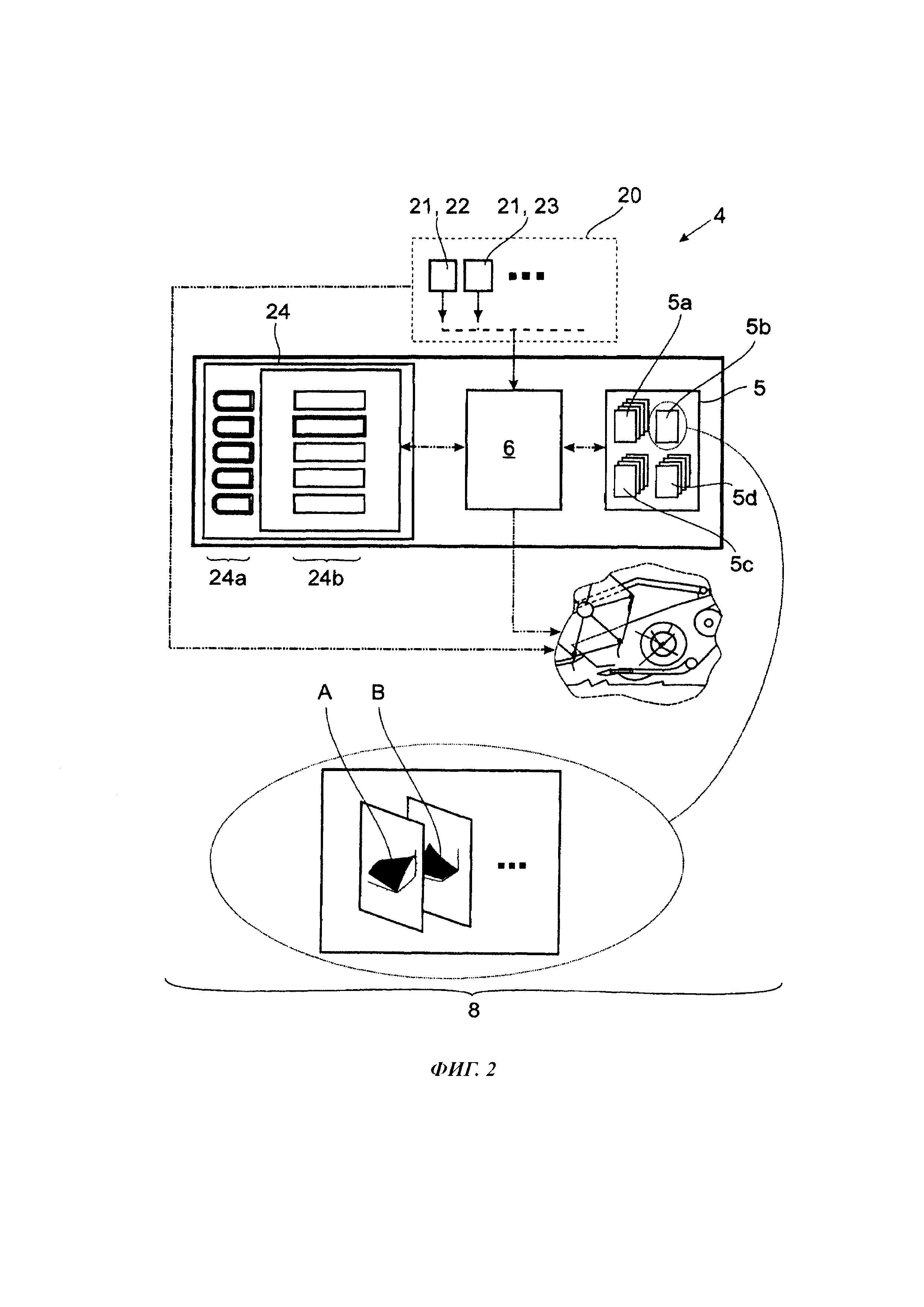
Фигура 2: схематичное изображение системы помощи водителю в уборочной машине, описываемой изобретением.
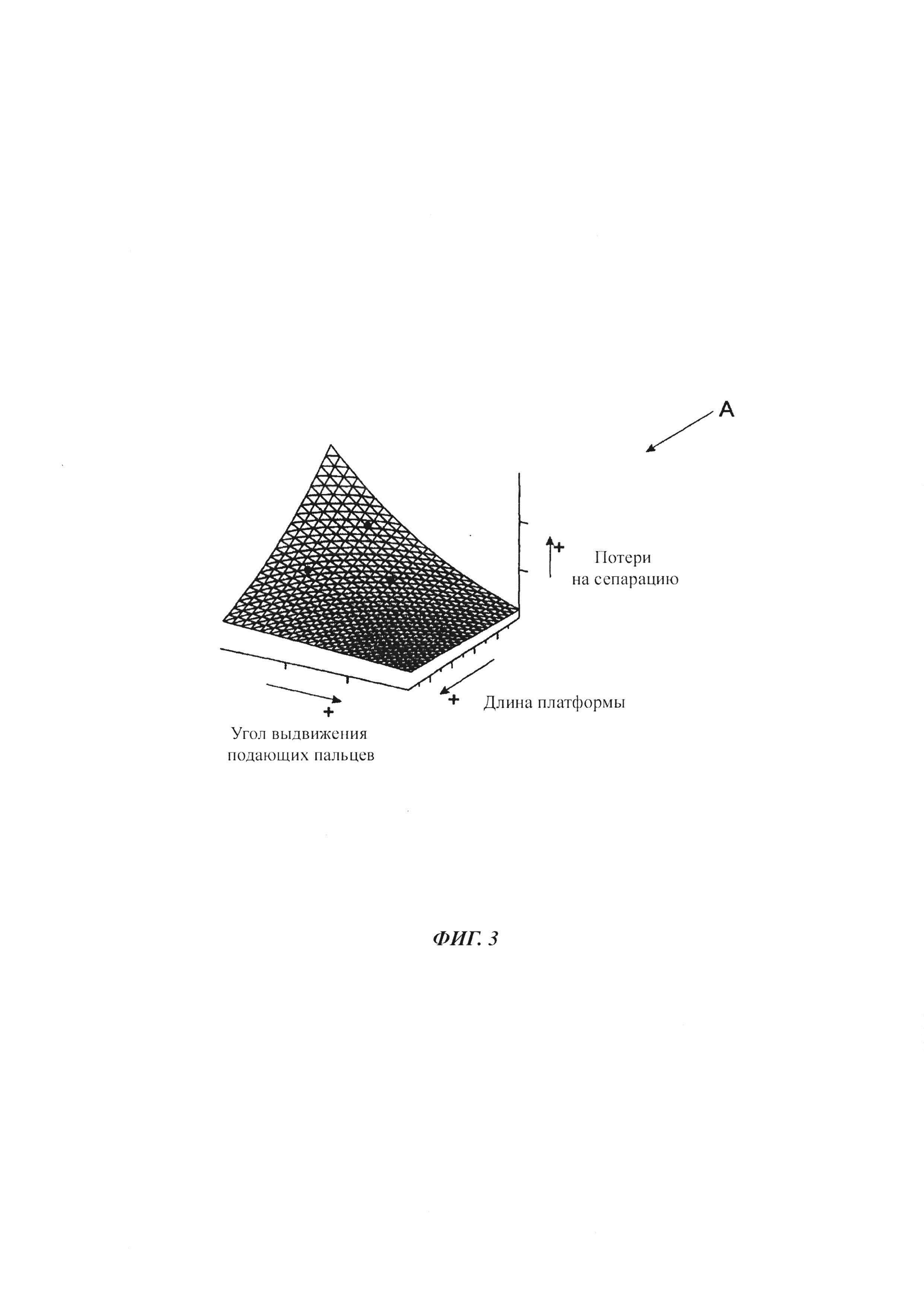
Фигура 3: поле характеристик с выходным параметром «Потери на сепарацию» и с входными параметрами «Угол выдвижения подающих пальцев» и «Длина платформы».
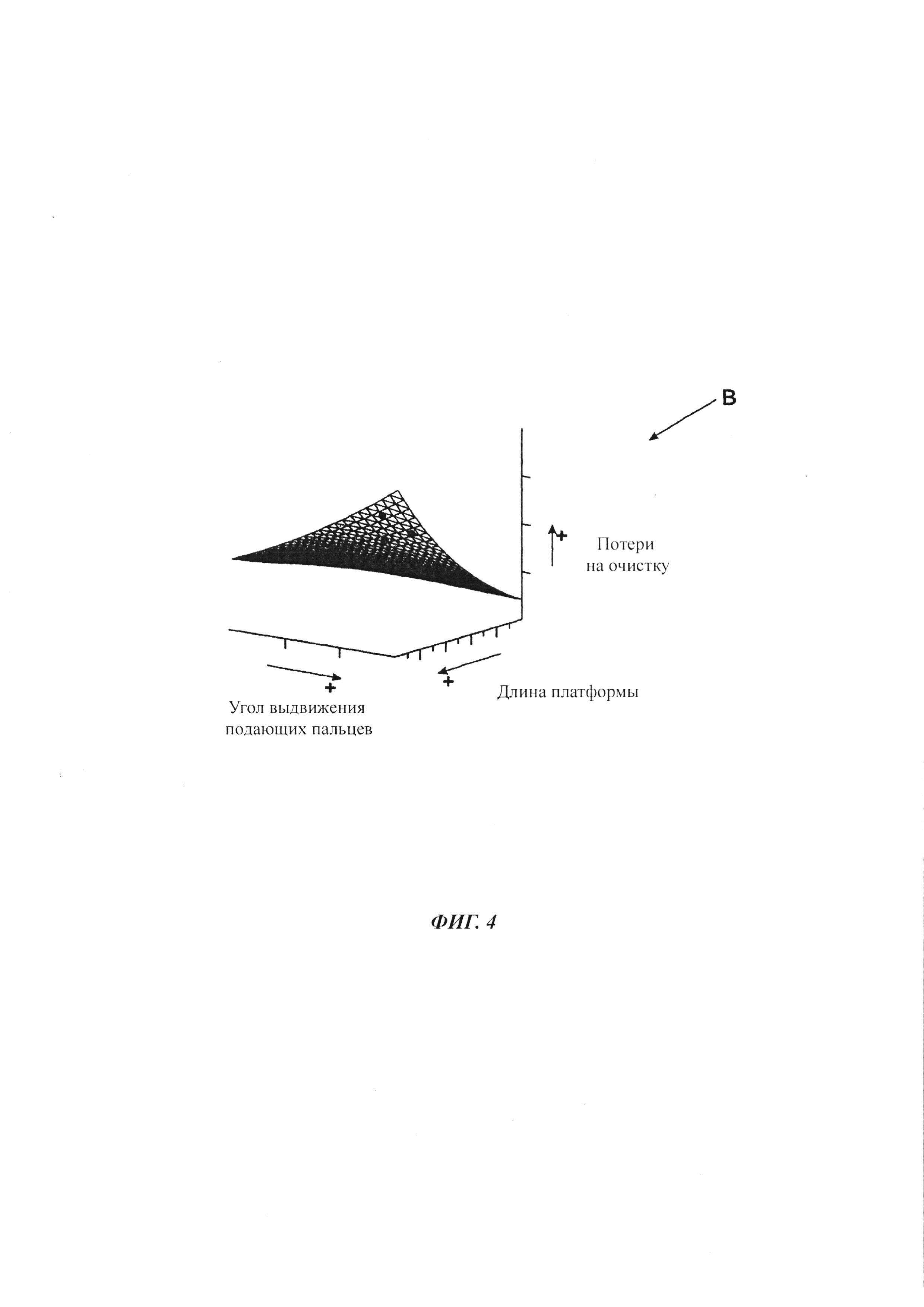
Фигура 4: поле характеристик с выходным параметром «Потери при очистке» и с входными параметрами «Угол выдвижения подающих пальцев» и «Длина платформы».
Осуществление изобретения
Описываемая изобретением сельскохозяйственная уборочная машина 1 содержит жатку 2, выполненную в виде навесного уборочного агрегата и предназначенную для срезания и захвата убираемой культуры. Жатка 2, предпочтительно, может быть заменена на другую жатку 2, что позволяет адаптировать комбайн 1 к уборке различных культур. При этом под убираемой культурой следует понимать весь материал, захватываемый жаткой 2 с поля. Как показано на фигуре 1, урожай скашивают жаткой 2, и полученную таким образом убранную культуру подают на наклонный транспортер 3.
Описываемая изобретением уборочная машина 1 содержит также систему 4 помощи водителю, предназначенную для управления жаткой 2. Такая система 4 помощи водителю содержит запоминающее устройство 5 для хранения данных - то есть запоминающее устройство в смысле информационной техники - и вычислительное устройство 6 для обработки данных, хранящихся в запоминающем устройстве 5. По существу, система 4 помощи водителю предназначена для оказания помощи оператору 7 уборочной машине 1 в управлении уборочной машиной. Система 4 помощи водителю с запоминающим устройством 5 и вычислительным устройством 6 схематично показана на фигуре 2.
Для рассматриваемого изобретения важно, что жатка 2 вместе с системой 4 помощи водителю образует автоматический режущий агрегат 8. Согласно изобретению, этот агрегат реализуют путем записи в запоминающее устройство 5 нескольких доступных для выбора стратегий 5а уборочного процесса и выполнения вычислительного устройства 6 с возможностью автономного определения, по меньшей мере, одного машинного параметра для жатки 2 и его задания для жатки 2 с целью реализации выбранной стратегии 5а уборочного процесса или выбранных стратегий 5а уборочного процесса. Такие машинные параметры для жатки 2 в настоящем описании называют «параметрами жатки». Таким образом, получают вышеупомянутый автоматический режущий агрегат 8, скоординированно управляющий совокупностью параметров, важных для работы жатки 2. Это позволяет, в частности, избежать различных конкурирующих и, возможно, взаимоисключающих управляющих действий. Напротив, управление всеми важными параметрами происходит «из одного источника». Таким образом, оператор 7 может получить требуемый качественный результат, не обладая специальными знаниями об операциях, необходимых для достижения этого результата.
Под определением параметров жатки понимают автономное определение в той мере, в которой стратегия 5а уборочного процесса в принципе реализуема вычислительным устройством 6 без в строгом смысле слова вмешательства оператора 7 или запроса оператора при определении параметров жатки. Подобное вмешательство оператора 7 в принципе возможно, но не обязательно. При этом записанные в память стратегии 5а уборочного процесса различаются целью настройки или оптимизации параметров уборочного процесса, что будет объяснено ниже.
Следует отметить, что система 4 помощи водителю может иметь централизованное исполнение. В этом случае она будет служить для управления не только жаткой 2, но и расположенными после нее рабочими агрегатами. По существу, возможен вариант, в котором система 4 помощи водителю будет иметь децентрализованную структуру и состоять из ряда отдельных управляющих систем. При этом, по существу, возможен вариант, в котором, по меньшей мере, часть рабочих агрегатов уборочной машины 1 будет иметь собственную децентрализованную систему управления.
Как уже говорилось, под уборочной машиной 1 понимают любую уборочную машину 1, оснащенную выполненной в виде навесного уборочного агрегата жаткой 2. В представленном и предпочтительном варианте исполнения уборочная машина 1 выполнена в виде зерноуборочного комбайна. Соответственно, за жаткой 2 расположен молотильный аппарат 9а, предназначенный для обмолота захваченной убранной культуры с получением зерна. Молотильный аппарат 9а обычно содержит молотильный барабан, взаимодействующий с декой молотильного барабана. За молотильным аппаратом 9а расположено сепарирующее устройство 9b. Поток убранной культуры, прошедший молотильный аппарат 9а, без уже полученного из него зерна направляют в сепарирующее устройство 9b. В сепарирующем устройстве 9b убранную культуру вместе с еще содержащимся в ней зерном перемещают, например, встряхивают таким образом, чтобы отделить от соломы и частей убранной культуры максимально возможное количество оставшегося зерна. После этого зерно, полученное в молотильном аппарате 9а и сепарирующем устройстве 9b, направляют на очищающее устройство 9с. В очищающем устройстве 9с, как правило, многоступенчатом, от зерна отделяют все еще содержащиеся в нем посторонние компоненты, например, мякину и частицы соломы, а также необмолоченный материал, в частности, колосья, ростки или ости. После этого очищенное зерно посредством транспортера 9, например, зернового элеватора 9d, поступает в зерновой бункер 9е. Обмолоченную солому, то есть остатки убранной культуры в сепарирующем устройстве 9b, уборочная машина выкладывает вдоль полосы движения, например, в виде валка.
В альтернативном варианте уборочная машина 1 может быть выполнена в виде кормоуборочного комбайна. В этом случае за жаткой 2 располагается узел подпрессовывающих валиков, а за ним - измельчающее устройство. Сепарация в кормоуборочном комбайне не требуется, так как вся собранная культура измельчается в измельчающем устройстве. Описываемые ниже варианты исполнения в первую очередь ориентированы на представленную уборочную машину 1, выполненную в виде зерноуборочного комбайна. Тем не менее, все варианты исполнения жатки 2 соответственно применимы к уборочной машине 1, выполненной в виде кормоуборочного комбайна 1.
Жатка 2 представленной уборочной машины 1 содержит мотовило 10, расположенной перпендикулярно направлению движения уборочной машины 1 и посредством расположенных на нем зубцов воздействующее на еще не срезанную культуру. Основная задача мотовила 10 заключается в подаче убираемой культуры на ножевой брус 12, оснащенный подвижным ножом 13. Нож 13 колеблется с частотой срезания, в результате чего культура срезается и падает на платформу 14, в передней части которой находится ножевой брус 12. Затем собранная культура, возможно, при помощи мотовила 10, подается втягивающим шнеком 15 на наклонный транспортер 3. Для этого шнек 15 оснащают листами 16, расположенными по обе стороны центральной части шнека 15, также называемой «втягивающей областью». Таким образом, срезанная культура сначала транспортируется во втягивающую область втягивающего шнека 15, а оттуда - на наклонный транспортер 3. Во втягивающей области шнек 15 оснащен несколькими подающими пальцами 17, которые в ходе вращения валика циклически выдвигаются из втягивающего шнека 15, когда шнек оказывается под углом выдвижения, и втягиваются в шнек 15, когда он оказывается под углом втягивания. Втягивание подающих пальцев 17 необходимо для предотвращения наматывания затянутой культуры на втягивающий шнек 15, в результате чего она не будет передаваться на наклонный транспортер 3.
Все вышеперечисленные компоненты жатки 2 расположены на несущей раме 18, состоящей из нескольких частей.
В зависимости от исполнения, жатка 2 допускает настройку различных параметров жатки при помощи соответствующих, не показанных здесь приводов, которыми можно управлять посредством системы 4 помощи водителю.
Например, с ножевым брусом 12 связан параметр 2а жатки «Высота ножевого бруса» и параметр 2b жатки «Угол срезания», как показано на фигуре 1. Платформа 14 переменной длины связана с параметром 2 с жатки «Длина платформы». Мотовило 10 связано с параметром 2d жатки «Положение мотовила (по горизонтали)» и параметром 2е жатки «Положение мотовила (по вертикали)». Кроме того, существуют дополнительные параметры жатки «Частота вращения втягивающего шнека», «Частота вращения мотовила» и «Частота срезания», которые, предпочтительно, можно регулировать с помощью системы 4 помощи водителю. Наконец, управление вышеуказанными подающими пальцами 17 возможно с помощью параметра 1f жатки «Угол выдвижения подающих пальцев», определяющего угловое положение относительно вращения втягивающего шнека 15, в котором подающие пальцы 17 выдвигаются из втягивающего шнека 15.
Указанные параметры жатки влияют не только на функции жатки 2 в узком смысле, но и на функции расположенных за ней рабочих агрегатов, в данном случае, молотильного аппарата 9а, сепарирующего устройства 9b и очищающего устройства 9с. При необходимости, потребуется также учесть распределительное устройство 19, предназначенное для распределения незерновых компонентов по полю и также зависящее от параметров жатки 2. Примеры взаимосвязей рассматриваются ниже.
Предпочтительно в запоминающее устройство 5 системы 4 помощи водителю записана функциональная модель 5b системы для, по меньшей мере, части уборочной машины 1, причем вычислительное устройство 6 осуществляет вышеупомянутое автономное определение, по меньшей мере, одного параметра 2а-f жатки на основании модели 5b системы.
Под функциональной моделью 5b системы понимают математическую модель, отражающую функциональные взаимосвязи в уборочной машине 1. Примеры таких функциональных взаимосвязей рассмотрены ниже.
Предпочтительно, вычислительное устройство 6 во время процесса уборки урожая сравнивает модель 5b системы с текущим состоянием уборочного процесса. Это означает, что вычислительное устройство 6 проверяет, совпадают ли описанные в модели 5b системы функциональные взаимосвязи с фактическим состоянием уборочного процесса. Если при такой проверке будут обнаружены отклонения, вычислительное устройство 6 предпринимает соответствующее изменение модели 5b системы. Такое сравнение в особенно предпочтительном варианте осуществляется циклически, причем широкое толкование термина «циклически» дано в общей части описания.
В предпочтительном варианте исполнения вычислительное устройство 6 рекурсивно сравнивает модель 5b системы с фактическим состоянием уборочного процесса и записывает модель 5b системы в запоминающее устройство 5. Это реализуется за счет того, что модель 5b системы, хранящаяся в запоминающем устройстве 5 перед сравнением, учитывается при сравнении. То есть, предусмотрена постепенная корректировка модели 5b системы.
В целях ускорения реакции уборочной машины 1 на меняющиеся условия уборочного процесса предпочтителен вариант, при котором вычислительное устройство 6 циклически определяет параметры жатки в указанном выше смысле. В этом варианте также следует учитывать широкое понимание понятия «циклически».
Как уже было сказано, под «состоянием уборочного процесса» понимают всю информацию об уборочном процессе. К ней относится информация о высаженной на поле культуре, в частности, «Плотность насаждения», «Уровень насаждений», «Влажность насаждений», «Длина стебля» и «Доля полеглой культуры». Кроме того, к ней относится параметр уборочного процесса «Потери при срезании колосьев», служащий меры срезанной, но не захваченной культуры, параметр уборочного процесса «Потери зерна при разбросе», служащий мерой потерь зерен в результате взаимодействия мотовила 10 и убираемой культуры, параметр уборочного процесса «Равномерность поперечного распределения потока убираемой культуры», служащий мерой равномерного распределения потока культуры по ширине наклонного транспортера 3, параметр уборочного процесса «Вариабельность потока убранной культуры по времени», служащий мерой равномерного распределения потока убранной культуры вдоль направления движения наклонного транспортера 3 по времени, параметр уборочного процесса «Потери на сепарацию», служащий мерой зерна, выбрасываемого на поле сепарирующим устройством 9b, параметр уборочного процесса «Потери на очистку», служащий мерой зерна, выбрасываемого на поле очищающим устройством 9с, и параметр уборочного процесса «Потери топлива», служащий мерой потребления жаткой 2 в целом. Наконец, к такой информации относятся параметры жатки, в частности, «Высота ножевого бруса», «Угол срезания», «Длина платформы», «Угол выдвижения подающих пальцев», «Положение мотовила (по горизонтали)», «Положение мотовила (по вертикали)», «Частота вращения втягивающего шнека», «Частота вращения мотовила» и «Частота срезания», а также информация об окружающей среде, в частности, «Температура окружающей среды» и «Влажность окружающей среды». Всю эту информацию, относящуюся к уборочному процессу, можно определять различными способами.
По существу, вышеупомянутый параметр уборочного процесса может также представлять собой параметр уборочного процесса «Толщина слоя», служащий мерой пропускной способности. Термин «Толщина слоя» может иметь широкое толкование и подразумевать как толщину потока убранной культуры, транспортируемой по наклонному транспортеру 3, так и объем этого потока. В частности, в настоящем описании термин «Толщина слоя» может быть заменен термином «Пропускная способность».
В предпочтительном варианте исполнения предусмотрено сенсорное устройство 20, предназначенное для распознавания, по меньшей мере, части параметров состояния уборочного процесса. Предпочтительно, сенсорное устройство 20 оснащено несколькими датчиками 21. Например, сенсорное устройство 20 содержит датчик 22, распознающий поток убранной культуры. Датчик 22 потока убранной культуры может содержать, например, камеру и давать информацию о параметре уборочного процесса «Равномерность поперечного распределения потока убираемой культуры» и/или «Вариабельность потока убранной культуры по времени». В качестве альтернативы или дополнения сенсорное устройство 20 может содержать датчик 23 насаждений, предоставляющий информацию о культуре на поле.
В качестве альтернативы определению состояния уборочного процесса с помощью сенсорного устройства 20 в системе 4 помощи водителю может быть предусмотрено устройство 24 ввода/вывода, позволяющее задавать, по меньшей мере, часть параметров состояния уборочного процесса. При этом, предпочтительно, вычислительное устройство 6 генерирует запросы относительно текущего состояния уборочного процесса и выводит их через устройство 24 ввода/вывода. В ответ на такой запрос оператор 7 может ввести, по меньшей мере, часть параметров состояния уборочного процесса с помощью устройства 24 ввода/вывода. Для этого устройство 24 ввода/вывода содержит соответствующие элементы 24а ввода и элементы 24b вывода.
Вышеуказанный запрос, предпочтительно, состоит в предложении оценить параметр урожая на поле «Доля полеглой культуры», то есть долю полеглых зерновых на поле. В простейшем случае оператору 7 предлагается выбрать один из предварительно определенных ответов.
Как было указано выше, модель 5b системы, предпочтительно, циклически сравнивают с фактическим состоянием уборочного процесса. В качестве исходного значения для модели 5b системы в запоминающее устройство 5 записывают, по меньшей мере, одну исходную модель 5 с, причем вычислительное устройство 6 выполняет первое определение, по меньшей мере, одного параметра жатки на основании исходной модели 5b. Под словами «первое определение» понимают ситуацию, в частности, в начале уборки урожая, в которой сравнение модели 5b системы еще не производилось.
В особенно предпочтительном варианте исполнения в запоминающее устройство 5 записывают, по меньшей мере, две исходные модели 5с, причем вычислительное устройство 6 в зависимости от соответствующего состояния уборочного процесса выбирает исходную модель 5с, на основании которой будет производиться последующее определение параметров жатки.
Каждая из рассматриваемых стратегий 5а уборочного процесса, доступных для выбора оператором 7, имеет свою цель. В первом варианте, по меньшей мере, одна стратегия 5а уборочного процесса направлена на настройку или оптимизацию, по меньшей мере, одного параметра уборочного процесса, в частности, «Потери при срезании колосьев», «Потери зерна при разбросе», «Равномерность поперечного распределения потока убираемой культуры», «Вариабельность потока убранной культуры по времени», «Потери на сепарацию», «Потери на очистку» или «Потери топлива» и т.п. При этом стратегию 5а уборочного процесса необходимо в каждом случае реализовать путем соответствующего задания параметров жатки, предпочтительно, параметром жатки «Длина платформы» или «Угол выдвижения подающих пальцев».
Модель 5b системы, предпочтительно, отражает, по меньшей мере, часть функциональных взаимосвязей между параметром уборочного процесса и, по меньшей мере, одним дополнительным параметром, предпочтительно, по меньшей мере, одним параметром жатки.
Для выражения функциональных взаимосвязей, по меньшей мере, одному параметру уборочного процесса назначают, по меньшей мере, одно поле А, В характеристик, причем этот параметр уборочного процесса в данном случае определен здесь как выходной параметр, по меньшей мере, одного поля А, В характеристик. Входным параметром, по меньшей мере, одного поля А, В характеристик, предпочтительно, служит параметр жатки, в частности, «Длина платформы» и «Угол выдвижения подающих пальцев».
На фигуре 3 изображено поле А характеристик, отражающее функциональную взаимосвязь выходного параметра «Потери на сепарацию» и входных параметров «Длина платформы» и «Угол выдвижения подающих пальцев». Согласно этому полю, потери на сепарацию, по меньшей мере, в первом приближении будут тем меньше, тем больше длина платформы. Кроме того, на поле А характеристик также видно, что потери на сепарацию тем меньше, чем больше угол выдвижения подающих пальцев 17, то есть чем позже выдвигаются подающие пальцы. Эти взаимосвязи обусловлены тем, что на практике потери на сепарацию тем ниже, чем меньше вариабельность потока убранной культуры по времени. Эту вариабельность можно уменьшить за счет увеличения длины платформы и увеличения угла выдвижения подающих пальцев 17.
На фигуре 4 изображено поле В характеристик, отражающее функциональную взаимосвязь выходного параметра «Потери на очистку» и входных параметров «Длина платформы» и «Угол выдвижения подающих пальцев». Отсюда следует, что потери на очистку, по меньшей мере, в первом приближении будут тем меньше, чем меньше длина платформы и угол выдвижения подающих пальцев 17. Это обусловлено тем, что на практике потери на очистку будут тем ниже, чем равномернее поток убранной культуры распределяется по всей ширине наклонного транспортера 3. Такое равномерное распределение достигается при большой длине платформы и малом угле выдвижения подающих пальцев 17, то есть ранем выдвижении подающих пальцев 17.
По существу, возможен вариант, в котором вычислительное устройство 6 будет определять, по меньшей мере, один параметр уборочного процесса на основании одного и того же поля А, В характеристик, возможно, с обусловленной вышеуказанным сравнением модификацией. Однако предпочтителен вариант, в котором вычислительное устройство 6 выбирает, по меньшей мере, одно поле А, В характеристик в зависимости от текущего состояния уборочного процесса и определяет, по меньшей мере, один параметр жатки на основании этого поля характеристик. Так, например, путем соответствующего выбора поля А, В характеристик можно реагировать на изменение условий уборочного процесса, например, на изменение влажности убираемой культуры и т.п.
Вышеупомянутое сравнение модели 5b системы с текущим состоянием уборочного процесса в случае модели 5b системы, по меньшей мере, с одним полем А, В характеристик производится, предпочтительно, путем сравнения вычислительным устройством 6, по меньшей мере, одного поля А, В характеристик во время уборки урожая, в частности циклически, с состоянием уборочного процесса. В качестве исходного значения, в отличие от исходной модели 5с, в запоминающее устройство 5 записывают, по меньшей мере, одно исходное поле характеристик, причем вычислительное устройство 6 выполняет первое определение, по меньшей мере, одного параметра жатки, соответственно, на основании исходного поля 5 с характеристик. На каждой из фигур 3 и 4 отмечен ряд реальных показаний датчиков для соответствующего состояния уборочного процесса. При вышеуказанном сравнении вычислительное устройство 6 изменяет соответствующее поле А, В характеристик, чтобы приблизить поле А, В характеристик к реальным показаниям датчиков. При этом, например, все поле А, В характеристик можно сместить в направлении соответствующего выходного параметра, на фигурах 3 и 4 - вверх или вниз. Разумеется, особенно предпочтителен вариант, в котором приближение поля А, В характеристик будет выполнено таким образом, чтобы одновременно были внесены изменения в соответствующие характеристические кривые.
Для реализации стратегии 5а уборочного процесса с помощью вычислительного устройства 6 в запоминающее устройство 5 записывают, по меньшей мере, одно правило 5d реализации. Возможны различные выгодные варианты правила 5d реализации. Первый вариант правила 5d реализации предусматривает определение, по меньшей мере, одного параметра жатки в процессе управления, а не в процессе регулирования. При этом вычислительное устройство 6 при определении, по меньшей мере, одного параметра жатки действует, предпочтительно, в качестве управления полем характеристик. Обратная связь при определении параметров жатки также не предусмотрена. Реакция вычислительного устройства 6 на изменения состояния уборочного процесса определяется исключительно вышеуказанным сравнением модели 5b системы с текущим состоянием уборочного процесса. Этот основной принцип управления жаткой 2 упрощает определение параметров жатки за счет устранения обратной связи. В результате ставится возможным реализовать даже сложные функциональные взаимосвязи, в частности, описываемых ниже конкурирующих стратегий с минимальными затратами вычислительных мощностей и времени.
Конкурирующие стратегии могут быть обусловлены, например, тем, что, по меньшей мере, одна доступная для выбора стратегия 5а уборочного процесса содержит, по меньшей мере, две части, конкурирующие друг с другом в отношении одного и того же параметра жатки. Вторая возможность в этом контексте заключается в том, что, по меньшей мере, две доступные для выбора стратегии уборочного процесса будут конкурировать друг с другом в отношении одного и того же параметра жатки. Например, уменьшение потерь на сепарацию согласно фигуре 3 требует увеличения длины платформы, а уменьшение потерь на очистку согласно фигуре 4 требует уменьшения длины платформы.
В приведенных выше ситуациях правило 5d реализации с целью реализации конкурирующих стратегий, предпочтительно, включает многоцелевую оптимизацию, при которой можно говорить, например, об оптимизации по Парето. Такую многоцелевую оптимизацию особенно легко реализовать на основе модели 5b системы, предпочтительно, на основе вышеуказанных полей А, В характеристик, еще более предпочтительно, с использованием вышеупомянутого управления полем характеристик.
В частности, при реализации конкурирующих друг с другом стратегий правило 5d реализации, предпочтительно, содержит, по меньшей мере, одно предварительное условие, на основании которого вычислительное устройство 6 при автономном определении, по меньшей мере, одного параметра жатки присваивает приоритеты выбранным стратегиям 5а уборочного процесса и/или частям выбранных стратегий 5а уборочного процесса и/или настраиваемым / оптимизируемым параметрам уборочного процесса и/или задаваемым параметрам жатки.
Согласно приведенным выше пояснениям к полю А, В характеристик, правило 5d реализации для стратегии настройки или оптимизации параметра уборочного процесса «Потери на сепарацию» заключается в том, что вычислительное устройство 6 при увеличении параметра уборочного процесса «Потери на сепарацию», основываясь на модели 5b системы, увеличивает параметр жатки «Угол выдвижения подающих пальцев» и/или параметр жатки «Длина платформы».
В следующем предпочтительном варианте правило 5d реализации для стратегии настройки или оптимизации параметра уборочного процесса «Потери на очистку» заключается в том, что вычислительное устройство 6 при увеличении параметра уборочного процесса «Потери на очистку», основываясь на модели 5b системы, уменьшает параметр жатки «Угол выдвижения подающих пальцев» и/или параметр жатки «Длина платформы».
Наконец, предпочтителен вариант, в котором правило 5d реализации для стратегии настройки или оптимизации параметра уборочного процесса «Потери топлива» заключается в том, что вычислительное устройство 6 при увеличении параметра уборочного процесса «Вариабельность потока убранной культуры по времени», основываясь на модели 5b системы, увеличивает параметр жатки «Угол выдвижения подающих пальцев» и/или параметр жатки «Длина платформы».
Следует отметить, что возможны и другие правила 5d реализации, основанные, в свою очередь, на других вариантах модели 5b системы, в частности, на других полях характеристик.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 уборочная машина
2 жатка
3 наклонный транспортер
4 система помощи водителю
5 запоминающее устройство
5а стратегия уборочного процесса
5b функциональная модель системы
5с исходная модель
5d правило реализации
6 вычислительное устройство
7 оператор
8 автоматический режущий агрегат
9 транспортирующее устройство 9а молотильный аппарат
9b сепарирующее устройство
9с очищающее устройство
9d элеватор
9е зерновой бункер
10 мотовило
11 зубья
12 ножевой брус
13 нож
14 платформа
15 втягивающий шнек
16 лист
17 подающий палец
18 несущая рама
19 распределительное устройство
20 сенсорное устройство
21 датчики
21с длина платформы
21d мотовило (по горизонтали)
21е мотовило (по вертикали)
21f угол выдвижения
22 датчик потока убранной культуры
23 датчик насаждений
24 устройство ввода/вывода
24а элемент ввода
24b элемента вывода
А, В поле характеристик
Реферат
Изобретение относится к сельскохозяйственной уборочной машине, оснащенной жаткой (2), выполненной в качестве навесного уборочного агрегата и предназначенной для срезания и сбора убираемой культуры, и системой (4) помощи водителю, предназначенной для управления жаткой (2). Система (4) помощи водителю содержит запоминающее устройство (5), предназначенное для хранения данных, и вычислительное устройство (6), предназначенное для обработки хранящихся в запоминающем устройстве (5) данных. Жатка (2) вместе с системой (4) помощи водителю образует автоматический режущий аппарат (8), причем в запоминающем устройстве (5) хранится несколько доступных для выбора стратегий (5а) уборочного процесса, а вычислительное устройство (6) рассчитано на автономное определение, по меньшей мере, одного машинного параметра - параметра (2a-f) жатки - и его задание для жатки (2) с целью реализации выбранной стратегии (5а) уборочного процесса или выбранных стратегий (5а) уборочного процесса. Изобретение обеспечивает управление жаткой с минимальной нагрузкой на оператора. 22 з.п. ф-лы, 4 ил.
Комментарии