Интеллектуальная система управления для земельного участка, объединяющая роботизированную самоходную машину - RU2628346C1
Код документа: RU2628346C1
Чертежи
Описание
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Иллюстративные варианты осуществления, в общем, относятся к интеллектуальным системам и, более конкретно, относятся к системе для интеллектуального управления для земельного участка, которое включает в себя мониторинг и обслуживание по уходу за земельным участком, которым содействует роботизированная самоходная машина.
УРОВЕНЬ ТЕХНИКИ
Задачи по обслуживанию по уходу за земельным участком могут включать в себя уход за газоном и/или задачи по садоводству, относящиеся к содействию росту и стрижке газонов или садово-парковых насаждений, которые, как можно надеяться, будут процветать в результате этих усилий. Содействие росту обычно требует, чтобы физические лица сфокусировали текущее обслуживание на обеспечении того, чтобы условия выращивания соответствовали выращиваемой растительности, и на решении задач по обеспечению необходимого ухода и чистки для дополнительного усиления роста.
После улучшения технологических возможностей, были разработаны различные устройства или датчики, которые способны обеспечить мониторинг различных аспектов условий выращивания. Таким образом, садоводы получили возможность использования датчиков или устройств в конкретных местоположениях для мониторинга и корректировки, при необходимости, условий выращивания. Однако, даже при улучшении устройств или датчиков для мониторинга, садоводам все же часто приходится применять высокую степень ручного взаимодействия для размещения и/или эксплуатации этих устройств или датчиков.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Некоторые иллюстративные варианты осуществления могут, таким образом, обеспечить возможность интеллектуального контроля или управления некоторым количеством средств, связанных с обслуживанием двора, с содействием или с привлечением роботизированной самоходной машины (например, роботизированной косилки, поливочного устройства, и/или чего-либо подобного). Таким образом, например, для эффективного садоводства и ухода за газоном, функционирование сенсорного оборудования и оборудования для выполнения задач может быть скоординировано с содействием роботизированной самоходной машины.
Согласно иллюстративному варианту осуществления, обеспечена система для обеспечения интеллектуального сада. Эта система может включать в себя сенсорное оборудование, оборудование для выполнения задач, устройство управления обслуживанием двора и робота. Сенсорное оборудование может включать в себя один или более датчиков, расположенных на некотором участке земли. Оборудование для выполнения задач может быть выполнено с возможностью выполнения задачи на этом участке. Задача может быть связана с генерацией результата, который может контролироваться посредством сенсорного оборудования. Устройство управления обслуживанием двора может быть выполнено с возможностью взаимодействия с сенсорным оборудованием и оборудованием для выполнения задач для сравнения измеренных условий с необходимыми условиями, для управления функционированием оборудования для выполнения задач. Робот может быть выполнен с возможностью обработки участка и выполнения по меньшей мере одного из действия в качестве одного из одного или более датчиков, действия в качестве устройства оборудования для выполнения задач, или взаимодействия с сенсорным оборудованием или оборудованием для выполнения задач.
Согласно другому иллюстративному варианту осуществления, обеспечен способ обеспечения интеллектуального сада. Этот способ может включать в себя прием данных датчиков от сенсорного оборудования, включающего в себя один или более датчиков, расположенных на участке земли, определение текущих условий на этом участке на основе данных датчиков, и сравнение текущих условий с необходимыми условиями, связанными с растительностью, посаженной на участке земли. Этот способ может дополнительно включать в себя обеспечение по меньшей мере одной команды, относящейся к функционированию оборудования для выполнения задач, выполненного с возможностью выполнения задачи на участке, причем задача связана с генерацией результата, который может контролироваться посредством сенсорного оборудования. Этот способ может также включать в себя использование робота для обработки участка. Робот может выполнять по меньшей мере одно из действия в качестве датчика сенсорного оборудования, действия в качестве устройства оборудования для выполнения задач, или взаимодействия с сенсорным оборудованием или оборудованием для выполнения задач.
Некоторые иллюстративные варианты осуществления могут улучшать способность операторов максимизировать красоту и продуктивность их дворов и садов, и делают это эффективным по затратам и дружественным к окружающей среде способом.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Таким образом, для описания данного изобретения в общих чертах, теперь будет сделана ссылка на сопутствующие чертежи, которые не обязательно изображены в масштабе, и в которых:
Фиг. 1 иллюстрирует блок-схему системы, согласно иллюстративному варианту осуществления;
Фиг. 2 иллюстрирует схему участка, который разделен на различные зоны, согласно иллюстративному варианту осуществления;
Фиг. 3 показывает иллюстративные условия эксплуатации роботизированной косилки, которую может использовать иллюстративный вариант осуществления;
Фиг. 4 иллюстрирует простой путь миграции воды, причем энергия для датчиков обеспечена удаленно, согласно иллюстративному варианту осуществления;
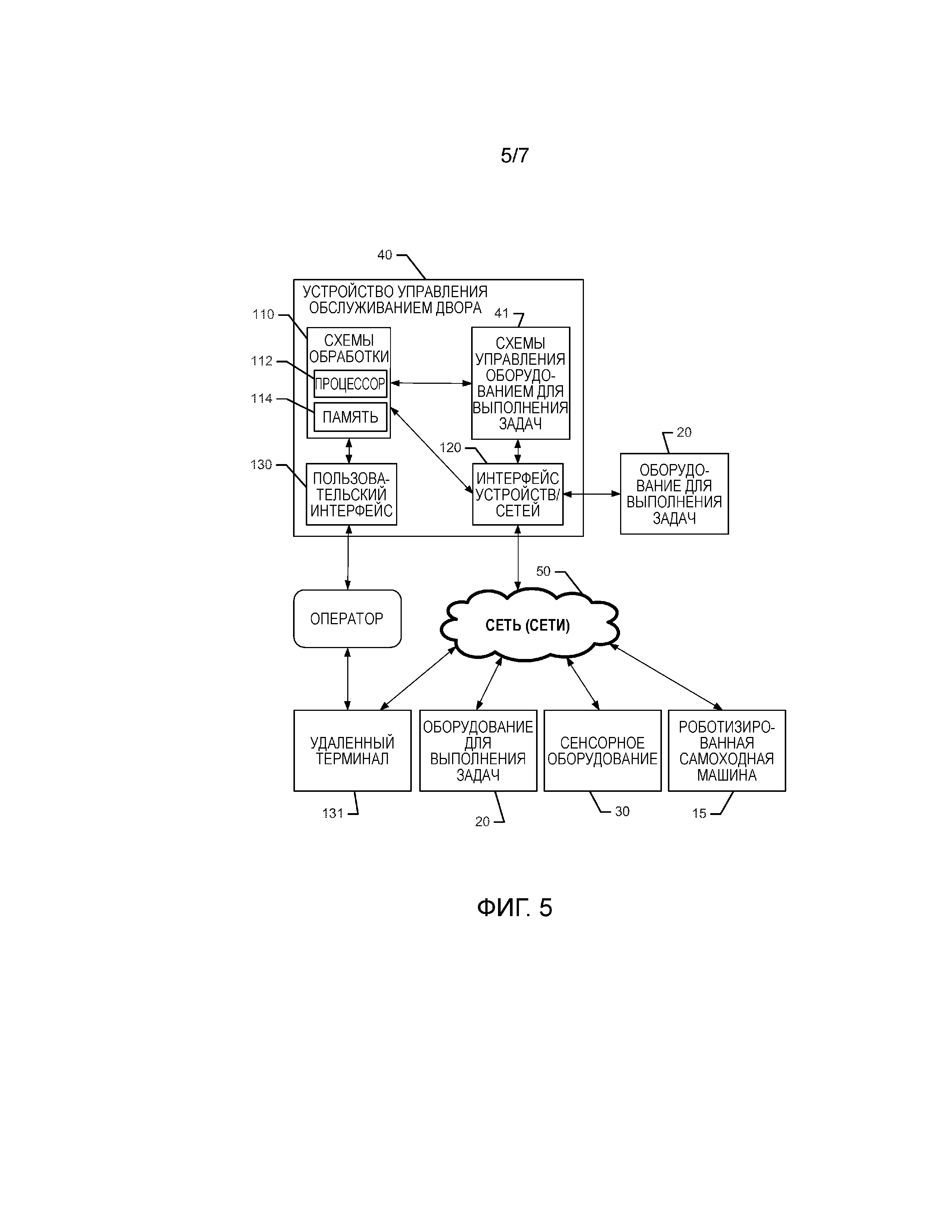
Фиг. 5 иллюстрирует блок-схему системы, имеющей схемы управления оборудованием для выполнения задач, объединенные в устройство управления обслуживанием двора, согласно иллюстративному варианту осуществления;
Фиг. 6 иллюстрирует блок-схему способа, согласно иллюстративному варианту осуществления; и
Фиг. 7 иллюстрирует схему участка с множеством средств на нем, которыми можно управлять с использованием иллюстративного варианта осуществления.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Далее будут более полно описаны некоторые иллюстративные варианты осуществления, со ссылкой на сопутствующие чертежи, на которых показаны некоторые, но не все, иллюстративные варианты осуществления. Действительно, примеры, описанные и показанные в настоящем документе, не должны толковаться как ограничивающие в отношении объема, применимости или конфигурации данного раскрытия сущности изобретения. Напротив, эти иллюстративные варианты осуществления обеспечены таким образом, чтобы данное раскрытие изобретения удовлетворяло применимым законным требованиям. Одинаковые ссылочные позиции по всему документу относятся к одинаковым элементам. Кроме того, в контексте настоящего документа термин «или» должен быть интерпретирован в качестве логического оператора, который является истинным всегда, когда один или более его операндов являются истинными. Дополнительно, термин «обслуживание сада» означает отношение к любой деятельности в отношении улучшения или обслуживания наружного земельного участка и не обязательно должен применяться к конкретной деятельности, прямо связанной с уходом за травой, дерном или дерниной. Таким образом, следует понимать, что обслуживание двора охватывает садоводство, уход за газоном, их комбинацию, и/или что-либо подобное. В контексте настоящего документа следует понимать, что работоспособное соединение относится к прямому или непрямому соединению, которое, так или иначе, обеспечивает возможность функциональной взаимосвязи компонентов, которые работоспособно соединены друг с другом.
Иллюстративные варианты осуществления могут обеспечить комплексную систему для мониторинга условий обслуживания двора (т.е., условий обслуживания газона и/или сада) в любом из того, что может, потенциально, быть некоторым количеством местоположений на всем протяжении конкретного участка, и выполнения задач, относящихся к этим местоположениям, при содействии мобильного средства, такого как роботизированная самоходная машина. В этой связи, например, система может использовать коммуникационную сеть, которая собирает информацию об условиях выращивания от сенсорного оборудования, для обеспечения связи этой информации с областями, из которых эта информация была собрана. Система может также использовать схемы обработки для обеспечения связи набора оптимальных или необходимых параметров условий выращивания с различными областями. Когда принимают информацию, описывающую условия выращивания различных областей, схемы обработки могут сравнить условия выращивания (т.е., текущие условия) с параметрами условий выращивания (т.е., необходимыми условиями), для определения того, необходимы ли, и до какой степени, корректирующие действия для улучшения условий выращивания. Схемы обработки могут принимать информацию от роботизированной самоходной машины и/или передавать команды роботизированной самоходной машине. Роботизированная самоходная машина может обеспечить очень высокую степень гибкости и большие возможности в системе в отношении механизмов, посредством которых в системе могут быть обеспечены электропитание, связь и относящиеся к задачам услуги.
Система может, таким образом, использовать любую комбинацию фиксированных и/или мобильных датчиков, которые собирают данные, которые относятся к конкретным сегментам участка, которые могут соответствовать каждой из соответствующих различных областей, упомянутых выше. В конкретных сегментах могут находиться разные типы растений, и, таким образом, они могут, оптимально, иметь разные необходимые условия выращивания, связанные с каждым соответствующим сегментом. Собственник/оператор может определить конкретные сегменты, которые могут называться «зонами», и идентифицировать растения, связанные с каждой зоной, или условия выращивания, необходимые для каждой зоны. В некоторых случаях, схемы обработки могут быть выполнены с возможностью корреляции необходимых условий выращивания с идентифицированным видом растений, на основе сохраненной информации, связанной с каждым видом растений, из базы данных или онлайнового ресурса. Таким образом, каждая зона будет иметь соответствующие параметры условий выращивания, связанные с ней, и параметры условий выращивания могут определять необходимые условия выращивания (например, любые или все из уровня влажности, температуры, уровня освещения, pH, и/или чего-либо подобного) для соответствующей зоны. В некоторых случаях, зоны могут быть, дополнительно, связаны с соответствующим оборудованием для выполнения задач, которое может быть использовано для изменения условий выращивания в соответствующих зонах и, может действовать в качестве потенциальных ресурсов для выполнения задач. Ресурсы могут быть связаны с зонами таким образом, чтобы были определены конкретные ресурсы (например, список ресурсов), которые доступны для использования в любой данной зоне. Тогда, схемы обработки либо могут управлять функционированием средств из списка ресурсов для обеспечения необходимого результата, либо могут обеспечивать команды или предложения для собственника/оператора относительно средств из списка ресурсов, которые могут быть использованы для обеспечения необходимого результата. Альтернативно, схемы обработки могут только информировать собственника/оператора о ситуации, и может предполагаться, что собственник/оператор предпринимает соответствующие корректирующие действия, при необходимости.
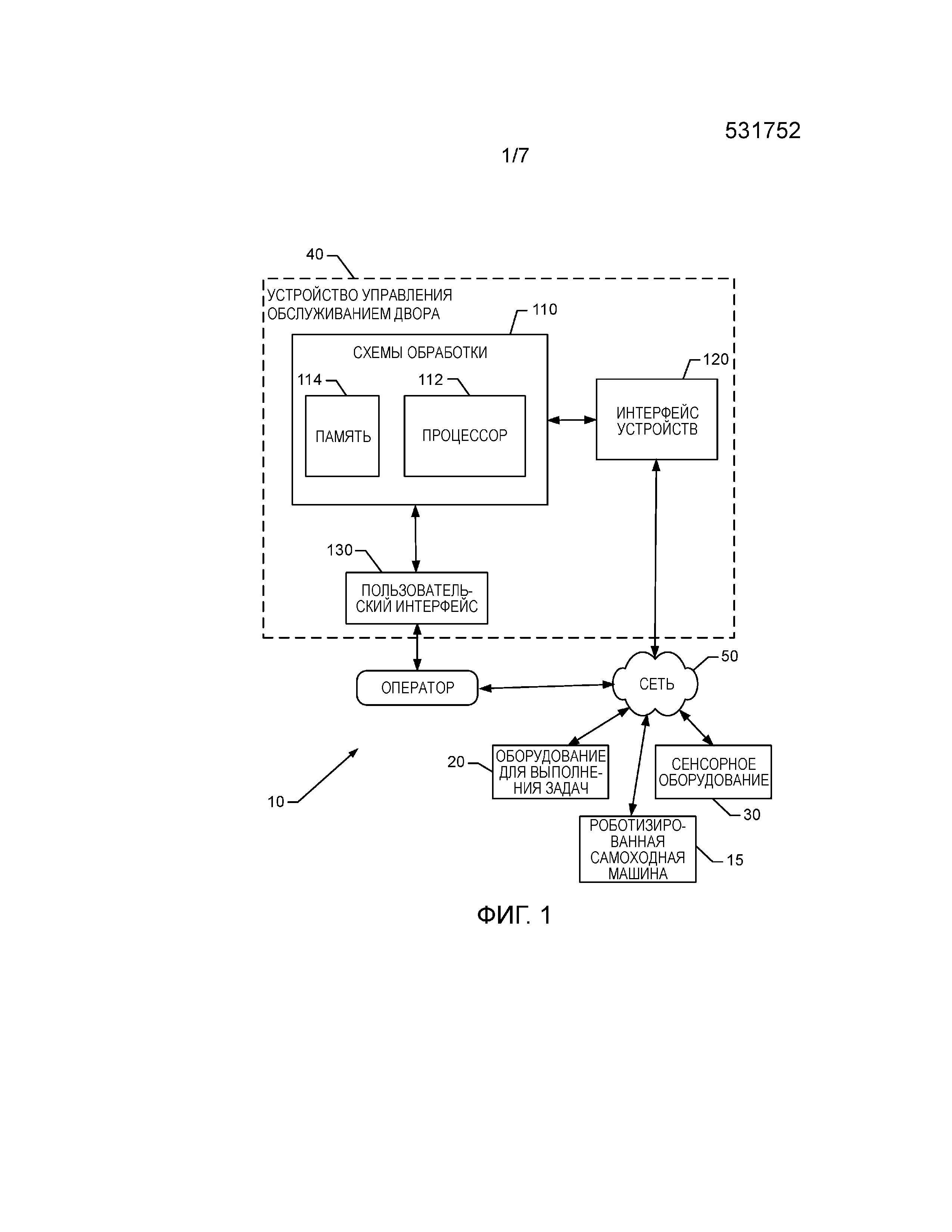
Фиг. 1 иллюстрирует блок-схему системы 10, которая может быть использована для выполнения основных операций, описанных выше, согласно иллюстративному варианту осуществления. В контексте фиг. 1, следует понимать, что некоторые задачи, такие как кошение травы, обычно выполняют посредством газонокосилок, которые могут быть толкаемыми сзади, самоходными или роботизированными моделями. Задачи, такие как подготовка почвы, могут быть выполнены посредством почвообрабатывающих орудий. Другие задачи, такие как полив газонов, могут быть выполнены посредством разбрызгивающих головок в фиксированных местоположениях или посредством транспортировки воды через шланги к необходимым местоположениям. Транспортировка может быть выполнена вручную, или посредством робота или роботизированной самоходной машины 15. Роботы или другие устройства могут быть также сцеплены для выполнения некоторых других задач по обслуживанию двора, таких как сгребание, внесение удобрения, освещение, рассеяние диких животных и/или что-либо подобное. Таким образом, следует понимать, что разбрызгиватели, роботы, почвообрабатывающие орудия, косилки и т.п., представляют оборудование 20 для выполнения задач, которое может быть использовано для выполнения функциональных задач, относящихся к деятельности по обслуживанию двора. Таким образом, оборудование 20 для выполнения задач может служить в качестве средств или ресурсов, которые могут быть использованы для обеспечения необходимых результатов в контексте системы.
Между тем, различные датчики могут быть использованы, посредством вставки таких датчиков в почву, для мониторинга условий почвы (например, уровней освещения, уровней влажности, pH, температуры, видеоданных или данных на основе изображения, и т.д.) или посредством транспортировки таких датчиков с использованием робота. Другие датчики могут быть расположены вблизи растительности, для мониторинга некоторых условий выращивания, либо на фиксированной, либо на мобильной платформе. Таким образом, например, датчики в некоторых случаях могут быть расположены на оборудовании 20 для выполнения задач. Независимо от конкретной конфигурации или парадигмы расположения, различные датчики могут представлять сенсорное оборудование 30, как описано выше.
Сенсорное оборудование 30, а также, в некоторых случаях, одно или несколько устройств, которые содержат оборудование 20 для выполнения задач, могут быть связаны с устройством 40 управления обслуживанием двора через сеть 50. Сеть 50 может быть сетью передачи данных, такой как локальная сеть (local area network - LAN), городская сеть связи (metropolitan area network - MAN), глобальная сеть (wide area network - WAN) (например, интернет), беспроводная персональная сеть (wireless personal area network - WPAN), и/или что-либо подобное, которые могут соединять клиентские устройства (например, сенсорное оборудование 30 и/или оборудование 20 для выполнения задач) с устройствами, такими как обрабатывающие элементы (например, персональные компьютеры, серверные компьютеры и т.п.) и/или базами данных, такими как устройство 40 управления обслуживанием двора. Связь между сетью 50, клиентскими устройствами и устройствами или базами данных (например, серверами), с которыми клиентские устройства соединены, может быть выполнена посредством механизма либо проводной, либо беспроводной связи и соответствующих коммуникационных протоколов. По существу, например, некоторые или все датчики сенсорного оборудования 30 могут быть соединены с устройством 40 управления обслуживанием двора посредством проводного и/или беспроводного коммуникационного средства. Между тем, некоторые или все устройства оборудования 20 для выполнения задач могут быть соединены с устройством 40 управления обслуживанием двора посредством проводного и/или беспроводного коммуникационного средства. По существу, например, удаленный терминал может быть соединен с устройством 40 управления обслуживанием двора посредством проводного и/или беспроводного коммуникационного средства.
Следует также понимать, что, хотя роботизированная самоходная машина 15 показана отдельно на фиг. 1, роботизированная самоходная машина 15 может действовать в качестве элемента сенсорного оборудования 30 и/или элемента оборудования 20 для выполнения задач. Однако даже при наличии у роботизированной самоходной машины 15 способности действовать в качестве элемента сенсорного оборудования 30 и/или элемента оборудования 20 для выполнения задач и способности роботизированной самоходной машины 15 содействовать функционированию сенсорного оборудования 30 и/или оборудования 20 для выполнения задач, даже когда роботизированная самоходная машина 15 не обязательно действует в качестве одного или другого из таких устройств, роботизированная самоходная машина 15 показана отдельно на фиг. 1. Следует также понимать, что устройство 40 управления обслуживанием двора может находиться на роботизированной самоходной машине 15, у зарядной станции роботизированной самоходной машины 15, или может находиться удаленно от роботизированной самоходной машины 15 (например, может находиться на компьютере, сервере или смартфоне). Когда устройство 40 управления обслуживанием двора находится на роботизированной самоходной машине 15, схемы обработки роботизированной самоходной машины и схемы обработки устройства 40 управления обслуживанием двора могут быть одними и теми же, или и те, и другие могут быть осуществлены на сопроцессорах одной и той же платформы.
Как показано на фиг. 1, устройство 40 управления обслуживанием двора может включать в себя схемы 110 обработки, которые могут быть выполнены с возможностью выполнения обработки данных, управления выполнением функций и/или выполнения другой обработки и услуг управления, согласно иллюстративному варианту осуществления данного изобретения. По существу, следует понимать, что устройство 40 управления обслуживанием двора может быть осуществлено в виде компьютера, смартфона, сервера, или другого вычислительного устройства. В некоторых вариантах осуществления, схемы 110 обработки могут быть осуществлены в виде микросхемы или набора микросхем. Другими словами, схемы 110 обработки могут содержать один или более физических модулей (например, микросхем), включающих в себя материалы, компоненты и/или провода на конструктивном блоке (например, материнской плате). Конструктивный блок может обеспечить физическую прочность, сохранение размера, и/или ограничение электрического взаимодействия для схем компонентов, включенных в него. Таким образом, схемы 110 обработки могут быть, в некоторых случаях, выполнены с возможностью реализации одного (некоторого) варианта осуществления данного изобретения на единственной микросхеме или в виде единственной «системы в микросхеме». По существу, в некоторых случаях, микросхема или набор микросхем может образовать средство для выполнения одной или нескольких операций для обеспечения функциональности, описанной в настоящем документе.
В иллюстративном варианте осуществления, схемы 110 обработки могут включать в себя один или более примеров процессора 112 и памяти 114, которые могут быть связаны или, иначе, могут управлять интерфейсом 120 устройств и, в некоторых случаях, пользовательским интерфейсом 130. По существу, схемы 110 обработки могут быть осуществлены в виде кристалла схемы (например, кристалла интегральной схемы), выполненного с возможностью (например, с использованием аппаратного обеспечения, программного обеспечения или комбинации аппаратного обеспечения и программного обеспечения) выполнения операций, описанных в настоящем документе. В некоторых вариантах осуществления, схемы 110 обработки могут устанавливать связь с электронными компонентами сенсорного оборудования 30 и оборудования 20 для выполнения задач через сеть 50 (которая может включать в себя одну или несколько коммуникационных сетей). Сеть 50 может быть локализована таким образом, чтобы она была связана с единственным участком, или может распространяться на множество участков и включать их в себя.
Пользовательский интерфейс 130 (если реализован) может быть связан со схемами 110 обработки для приема указания на пользовательский ввод данных на пользовательском интерфейсе 130, и/или для обеспечения звукового, визуального, механического или другого выходного сигнала для пользователя. По существу, пользовательский интерфейс 130 может включать в себя, например, устройство отображения, одну или несколько кнопок или клавиш (например, функциональные кнопки или клавиатуру), и/или другие механизмы ввода/ вывода данных (например, микрофон, громкоговорители, курсор, джойстик, источники света и/или что-либо подобное). Пользовательский интерфейс 130 может быть выполнен с возможностью обеспечения предупредительных сигналов, предупреждающих сообщений и/или уведомлений для пользователя или оператора, в качестве реакции на различные детектированные запускающие условия (например, посредством сенсорного оборудования 30 или других компонентов). В некоторых случаях, пользовательский интерфейс 130 может быть выполнен с возможностью генерации таких предупредительных сигналов, предупреждающих сообщений и/или уведомлений, в качестве реакции на условия выращивания растений, которых нет в спецификации или которые находятся вне рекомендованных диапазонов. Сбои системы, повреждение или порча оборудования, кража оборудования и другие стимулы, относящиеся к компонентам, могут быть также определены в качестве запускающих событий для генерации предупредительных сигналов, предупреждающих сообщений и/или уведомлений. Предупредительные сигналы, предупреждающие сообщения и/или уведомления могут быть сгенерированы посредством светового, звукового, визуального устройства отображения, или других устройств, которые могут быть подключены к устройству 40 управления обслуживанием двора или могут быть его частью. В некоторых случаях, уведомления могут быть обеспечены посредством текстового сообщения или электронной почты.
Интерфейс 120 устройств может включать в себя один или более интерфейсных механизмов для обеспечения возможности установления связи с другими устройствами через сеть 50. В некоторых случаях, интерфейс 120 устройств может быть любым средством, таким как устройство или схемы, осуществленные либо в аппаратном обеспечении, либо в комбинации аппаратного обеспечения и программного обеспечения, которые выполнены с возможностью приема и/или передачи данных от/к датчикам сенсорного оборудования 30 и устройствам оборудования 20 для выполнения задач, связанным со схемами 110 обработки, посредством интерфейса 120 устройств, способного отправлять и принимать сообщения через сеть 50. В некоторых иллюстративных вариантах осуществления, интерфейс 120 устройств может обеспечить интерфейсы для связи компонентов, внутренних по отношению к системе 10, с компонентами, внешними по отношению к системе 10. Например, в варианте осуществления, в котором устройство 40 управления обслуживанием двора осуществлено в виде компьютера или сервера, интерфейс 120 устройств может обеспечить возможность связи (например, через интернет или способами беспроводной связи) со смартфоном собственника/оператора. Эта связь может быть также обеспечена через сеть 50 (или через подсеть сети 50), в некоторых случаях. Однако, следует также понимать, что собственник/оператор может напрямую взаимодействовать с устройством 40 управления обслуживанием двора через пользовательский интерфейс 130.
Процессор 112 может быть осуществлен несколькими разными способами. Например, процессор 112 может быть осуществлен в виде различных обрабатывающих средств, таких как один или более из микропроцессоров или других обрабатывающих элементов, сопроцессоров, контроллеров или различных других вычислительных или обрабатывающих устройств, включая интегральные схемы, такие как, например, специализированная интегральная схема (application specific integrated circuit - ASIC), матрица программируемых логических вентилей (field programmable gate array - FPGA), и т.п. В иллюстративном варианте осуществления, процессор 112 может быть выполнен с возможностью исполнения команд, хранящихся в памяти 114, или иным образом доступных процессору 112. По существу, при конфигурировании с использованием аппаратного обеспечения или с использованием комбинации аппаратного обеспечения и программного обеспечения, процессор 112 может представлять собой объект (например, физически осуществленный в схемах – в форме схем 110 обработки) способный выполнять операции согласно вариантам осуществления данного изобретения, при конфигурировании соответствующим образом. Таким образом, например, когда процессор 112 осуществлен в виде ASIC, FPGA и т.п., процессор 112 может быть конкретно сконфигурированным аппаратным средством для проведения операций, описанных в настоящем документе. Альтернативно, в другом примере, когда процессор 112 осуществлен в виде исполнителя команд программного обеспечения, команды могут, конкретно, сконфигурировать процессор 112 для выполнения операций, описанных в настоящем документе.
В иллюстративном варианте осуществления, процессор 112 (или схемы 110 обработки) может быть осуществлен в виде устройства 40 управления обслуживанием двора, может включать в себя устройство 40 управления обслуживанием двора, или может иным образом управлять устройством 40 управления обслуживанием двора. По существу, в некоторых вариантах осуществления, процессор 112 (или схемы 110 обработки), можно сказать, обеспечивает выполнение каждой из операций, описанных в связи с устройством 40 управления обслуживанием двора, посредством обеспечения того, чтобы устройство 40 управления обслуживанием двора действовало согласно соответствующим функциональностям, в качестве реакции на исполнение команд или алгоритмов, конфигурирующих процессор 112 (или схемы 110 обработки) соответствующим образом. В качестве примера, устройство 40 управления обслуживанием двора может быть выполнено с возможностью приема информации датчиков от сенсорного оборудования 30 и принятия решений относительно информации, подлежащей обеспечению для собственника/оператора и/или команд, подлежащих обеспечению для оборудования 20 для выполнения задач. Схемы 110 обработки могут, в некоторых случаях, обрабатывать информацию об условиях, принимаемую от сенсорного оборудования 30, и сравнивать информацию об условиях с параметрами условий выращивания, которые хранятся в памяти 114 для данной зоны.
В иллюстративном варианте осуществления, память 114 может включать в себя одно или несколько непереходных запоминающих устройств, таких как, например, энергозависимая и/или энергонезависимая память, которая может быть либо фиксированной, либо съемной. Память 114 может быть выполнена с возможностью хранения информации, данных, приложений, команд и т.п., для обеспечения возможности выполнения устройством 40 управления обслуживанием двора различных функций согласно иллюстративным вариантам осуществления данного изобретения. Например, память 114 может быть выполнена с возможностью буферизации входных данных для обработки посредством процессора 112. Дополнительно или альтернативно, память 114 может быть выполнена с возможностью хранения команд, для исполнения посредством процессора 112. В качестве еще одной альтернативы, память 114 может включать в себя одну или несколько баз данных, которые могут сохранять множество наборов данных, в качестве реакции на входные данные от сети датчиков. Среди контекста памяти 114, могут храниться приложения, для исполнения посредством процессора 112, для выполнения функциональности, связанной с каждым соответствующим приложением. В некоторых случаях, приложения могут включать в себя сравнение информации, указывающей на текущие условия выращивания, детектированные в зоне, с хранимой информацией о параметрах условий выращивания, которые необходимы для растительности, которая находится в зоне. Как указано выше, параметры условий выращивания могут быть введены оператором или могут быть извлечены или считаны из баз данных или источников, доступных через интернет, на основе ввода данных об идентичности растительности в данной зоне.
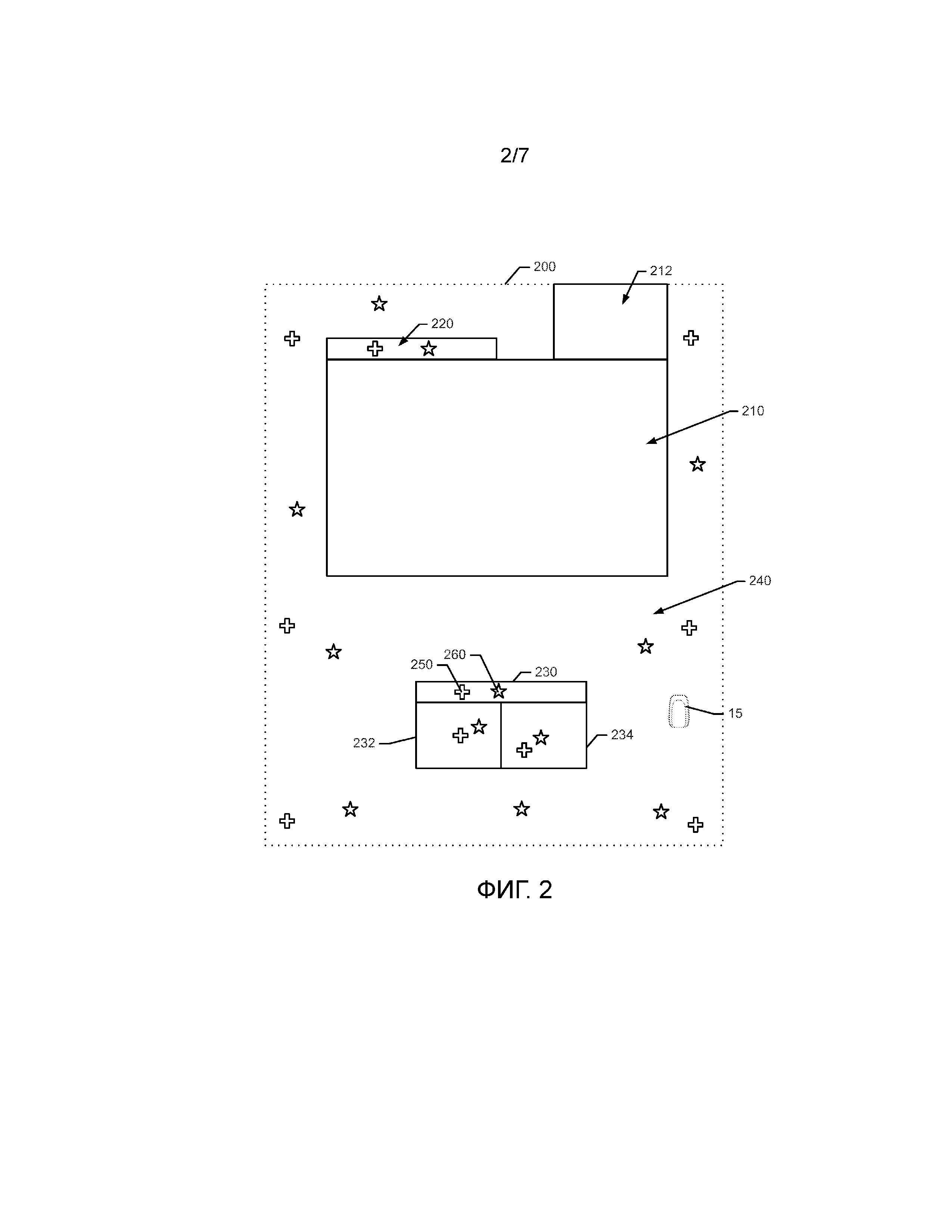
Как упомянуто выше, участок (или участки), для которого устройство 40 управления обслуживанием двора обеспечивает обслуживание, может быть разделен на зоны. Каждая зона может контролироваться и управляться на основе конкретных разных условий выращивания, которые необходимы для растительности, обеспеченной в ней. Фиг. 2 иллюстрирует схему участка 200, который разделен на различные зоны. Некоторые из зон могут быть активными зонами, в то время как другие зоны могут быть неактивными зонами. Активные зоны могут быть зонами, которые включают в себя сенсорное оборудование 30 и/или оборудование 20 для выполнения задач или иным способом обеспечивают доступ к ним. Неактивные зоны могут быть зонами, которые либо не включают в себя сенсорное оборудование 30 и/или оборудование 20 для выполнения задач, либо не обеспечивают доступ к ним, или могут быть областями, для которых, независимо от возможности мониторинга и выполнения задач, такая деятельность не является необходимой. По существу, например, неактивная зона может включать в себя область, которая закрыта домом, бетоном, дорожным покрытием, или землю, которая является залежью или просто не предназначена для активного управления. На фиг. 2, определено, что первая неактивная зона 210 очерчена отпечатком дома, и определено, что вторая неактивная зона 212 очерчена отпечатком подъездной дороги, ведущей к дому.
Первая активная зона 220 обеспечена спереди дома и может представлять собой грядку. Вторая активная зона 230, третья активная зона 232 и четвертая активная зона 234 обеспечены на заднем дворе и могут представлять собой сад. Остальная часть двора может представлять собой пятую активную зону 240. Следует отметить, что в этом примере, первая активная зона 220 закрывает относительно большой участок, предназначенный для представления всей грядки. Между тем, пятая активная зона 240 представляет весь двор, который либо не является неактивным, либо не связан с садом. Однако эти примеры сегментации являются просто иллюстрацией для представления относительно простого примера для содействия объяснению иллюстративного варианта осуществления. Таким образом, следует понимать, что грядка и двор могут быть дополнительно разбиты на одну или несколько других (например, меньших) зон, при необходимости. Подобным образом, хотя сад разбит на меньшие зоны в этом примере, следует понимать, что сад может быть также дополнительно разбит. Кроме того, может быть определено, что отдельные растения, ряды растений и/или что-либо подобное образуют свои собственные зоны, в некоторых случаях. Подобным образом, в пределах двора, одно или несколько деревьев, кустов или других конкретных растений могут быть идентифицированы в качестве своих собственных соответствующих зон. По существу, в некоторых случаях, варианты осуществления могут быть осуществлены на практике совсем без использования зон. Вместо этого, например, отдельные датчики (и/или оборудование для выполнения задач) могут быть скоррелированы с соответствующими разными растениями и, таким образом, с условиями выращивания, которые являются подходящими или предпочтительными для соответствующих разных растений.
Зоны (если использованы) могут быть запрограммированы в устройстве 40 управления обслуживанием двора, и устройство 40 управления обслуживанием двора может также знать о сенсорном оборудовании и оборудовании для выполнения задач, которое связано с каждой соответствующей зоной. В некоторых случаях, зоны могут быть просто идентифицированы, и соответствующая связь со средствами (например, датчиками или оборудованием для выполнения задач) может быть также выполнена с возможностью корреляции каждого средства с одной из зон (или множеством зон) без необходимости связи зон с какими-либо картографическими данными. Однако, в некоторых вариантах осуществления, участок 200 может быть определен относительно соответствующих картографических данных, и зоны могут быть определены относительно картографических данных. В таком примере, отображение, такое как отображение, показанное на фиг. 2, может быть обеспечено для представления участка 200. В примерах, где картографические данные не являются необходимыми и не используются иным способом, изображение фиг. 2 может просто представлять физическое расположение средств, а устройство 40 управления обслуживанием двора не обязательно должно иметь понимание фактического географического расположения. Вместо этого, устройство 40 управления обслуживанием двора может быть выполнено с возможностью обеспечения только связей данных, между принимаемой информацией, зонами, с которыми эти данные коррелируют, и средствами в зонах. Как упомянуто выше, устройство 40 управления обслуживанием двора может также иметь способность записывать информацию, запрограммированную относительно необходимых условий выращивания, причем такая информация является либо запрограммированной напрямую оператором, либо является доступной на основе идентификации растительности, которая находится в пределах соответствующей зоны.
В некоторых вариантах осуществления, например, память 114 может хранить файл идентификаторов участка, включающий в себя картографические данные, определяющие границы участка 200, границы зон и/или информацию о местоположениях, идентифицирующую местоположение средств (например, сенсорного оборудования 30 и оборудования 20 для выполнения задач), расположенных на участке 200. В некоторых случаях, местоположения и/или границы могут быть идентифицированы на основе GPS-координат, триангуляции с использованием радиомаяков, или расстояния/направления до других известных местоположений, объектов или положений. Данные в виде изображения могут быть использованы для подтверждения или помощи в нахождении границ, в некоторых ситуациях. Альтернативно или дополнительно, информация о границах и/или местоположениях может быть изучена (например, посредством робота, такого как роботизированная самоходная машина 15, перемещающаяся вблизи границы или местоположения, и отмечающая границу или местоположение (например, с использованием RFID-технологии и т.п.)). При нахождении границы или местоположения устройства, может быть осуществлен доступ к картографическим данным файла идентификаторов участка (посредством схем 110 обработки) для записи соответствующей информации, связанной с этим. По существу, в некоторых вариантах осуществления, граничный кабель, определяющий рабочую область роботизированной самоходной машины 15, может соответствовать границе одной или нескольких зон.
Как упомянуто выше, роботизированная самоходная машина 15 может улучшить возможности системы 10, или роботизированная самоходная машина 15 может служить в качестве одного или более других компонентов (например, сенсорного оборудования 30 или оборудования 20 для выполнения задач) системы 10. В качестве примера, как показано на фиг. 2, каждая зона может иметь один или более компонентов сенсорного оборудования и оборудования для выполнения задач, связанных с ней. Например, датчик 250 влажности (указанный посредством крестика) может быть дополнен соответствующим разбрызгивателем 260 (указанным посредством звездочки). Другие крестики на изображении фиг. 2 могут представлять другие датчики (например, датчики влажности), а другие звездочки могут представлять другое оборудование для выполнения задач (например, разбрызгиватели), связанные с другими зонами. Кроме того, в некоторых случаях, один или более разбрызгивателей могут управляться посредством приведения в действие исполнительного механизма 265. Исполнительный механизм 265 и другие исполнительные механизмы в системе могут быть связаны с одним или несколькими электрическими, гидравлическими или иным образом локально или удалено управляемыми устройствами, которые могут, при функционировании, обслуживать или не обслуживать одно или несколько других устройств.
В некоторых вариантах осуществления, единственный датчик любого данного типа может быть связан с данной зоной. Таким образом, в этом примере, во второй активной зоне 230 показан один датчик 250 влажности. Однако, pH-датчик, датчик температуры, камера, и/или датчик освещения также могут быть включены во вторую активную зону 230. Посредством обеспечения только одного датчика любого данного типа на зону, данные датчика, собранные от каждого соответствующего датчика, как можно легко понять, представляют условия для всей зоны. В таком примере, один элемент оборудования для выполнения задач любого данного типа может быть также использован в самых простых примерах (как показано для сада и грядки на фиг. 2). Кроме того, в некоторых случаях, может существовать один элемент оборудования для выполнения задач, связанный с каждым соответствующим датчиком данного типа. Фактически, в некоторых случаях, может существовать ограничение на расстояние, которое необходимо обеспечить между датчиком данного типа (например, датчиком влажности) и элементом оборудования для выполнения задач, который соответствует этому датчику (например, разбрызгивателем). Таким образом, например, каждый датчик влажности может находиться но расстоянии не более данного расстояния от соответствующего разбрызгивателя. Кроме того, в некоторых случаях, разбрызгиватель и датчик влажности могут быть объединены друг с другом. Однако, следует понимать, что, в зависимости от характеристик оборудования для выполнения задач (и возможных препятствий), может быть необходимо обеспечение многочисленных элементов оборудования для выполнения задач в одной или нескольких зонах, или обеспечение связи многочисленных элементов оборудования для выполнения задач с датчиком данного типа. Подобным образом, может быть необходимо обеспечение связи многочисленных датчиков с единственным элементом оборудования для выполнения задач.
В других вариантах осуществления, многочисленные датчики (даже данного типа) и многочисленные элементы оборудования для выполнения задач (даже данного типа – осветительный элемент, поливочное устройство, устройство внесения удобрений, триммер, косилка, камера, и т.д.) могут быть связаны с данной зоной. Однако следует понимать, что в таком варианте осуществления, связи разных средств в пределах зоны могут эффективно (или фактически), хотя и необязательно, создавать подзоны, которыми можно управлять коллективно или индивидуально. Пятая активная зона 240 является примером такой зоны.
Для физических соединений, выполненных между средствами, проводные и/или шланговые соединения для обеспечения электропитания, связи или других услуг снабжения, могут быть выполнены любым необходимым способом и могут быть запрограммированы в устройстве 40 управления обслуживанием двора или иным образом известны ему. Беспроводные соединения (если использованы) могут быть выполнены посредством радиоустройств ближнего действия или других радиоустройств, которые могут обеспечить связь с датчиками или другими средствами. Например, могут быть использованы Bluetooth, WiFi, Zigbee, RFID (связь ближнего действия), GSM, или другие специализированные или основанные на стандартах механизмы связи. В некоторых вариантах осуществления, если один или более датчиков расположены рядом друг с другом или рядом с оборудованием для выполнения задач, то группа устройств может установить связь с узлом связи (который может быть одним из датчиков или устройств), и этот узел может беспроводным способом (или через проводное соединение) отправлять данные к устройству 40 управления обслуживанием двора. Энергия также может быть обеспечена локально посредством аккумуляторной батареи или солнечных элементов, которые могут быть размещены вблизи одного или более средств, или посредством питающих кабелей, проложенных к одному или нескольким средствам.
Когда средства включают в себя разбрызгиватели, разбрызгиватели может быть снабжены водой из одного или более шланговых или трубных соединений. В некоторых случаях, многочисленные разбрызгиватели могут питаться от одного и того же шланга (например, последовательно или параллельно). Управление операциями разбрызгивателей может быть выполнено посредством наполнения шланга без локального управления или посредством наполнения шланга и обеспечения индивидуального управления клапанами, обеспеченными для локального управления каждого разбрызгивателя посредством электронного управления. Другие приспособления для орошения (например, кран для орошения) могут быть также использованы в других иллюстративных вариантах осуществления.
В некоторых вариантах осуществления, дополнительно к использованию фиксированных средств, описанных выше, может быть использован один или более мобильных средств. В этом контексте, например, роботизированная косилка или поливочное устройство могут быть использованы для содействия сбору данных и/или выполнению задач. Хотя может быть использовано любое мобильное средство, в настоящем документе будет описан иллюстративный вариант осуществления в контексте роботизированной газонокосилки или поливочного устройства, действующих в качестве роботизированной самоходной машины 15. Как описано выше, роботизированный робот 15 (или «робот») может работать в пределах рабочей области, определенной посредством граничного кабеля или другим способом. В некоторых случаях, робот может выполнять задачу (например, кошение травы или полив газона (например, посредством транспортировки небольшого (например, 5 мм или менее) шланга, соединенного с источником воды через шланговую катушку) на участке 200. Робот может быть снабжен RFID-считывателем для считывания RFID-тэга одного или более датчиков и/или элементов оборудования для выполнения задач. В некоторых случаях, робот может включать в себя модуль позиционирования, который способен отмечать местоположение, в котором один или более RFID-тэгов были считаны. Таким образом, робот может получать информацию о географическом местоположении для отображения местоположения средств. По существу, местоположения устройств системы 10 могут быть изучены.
Альтернативно или дополнительно, в некоторых случаях, робот может дополнительно считывать данные от соответствующих датчиков, которые он находит при функционировании. Робот может сохранять такие данные или передавать их беспроводным способом к устройству 40 управления обслуживанием двора. Если данные сохранены, то эти данные могут быть переданы к зарядной станции или коммуникационному устройству, связанному с ней, когда робот стыкуется для зарядки. Коммуникационное устройство может, затем, передать данные к устройству 40 управления обслуживанием двора. В некоторых случаях, граничный кабель может быть использован для обеспечения электропитания датчиков и/или коммуникационного устройства. Кроме того, в некоторых случаях, граничный кабель может быть даже использован в качестве временного или подходящего к данному случаю передающего средства (например, действующего в качестве антенны).
В некоторых примерах, маломощные средства связи ближнего действия могут быть использованы между роботом и датчиками, узлами связи, и/или оборудованием для выполнения задач. Затем, робот может использовать более мощные средства связи для передачи информации к устройству 40 управления обслуживанием двора и приема команд от него. Альтернативно, робот может также использовать маломощные средства связи при стыковке для подзарядки. Затем, робот может снова использовать маломощные средства связи ближнего действия для управления некоторыми действиями таким образом, чтобы поддерживать низкое общее потребление энергии, посредством использования минимальной величины энергии для системных средств связи.
Кроме того, в некоторых вариантах осуществления, сам робот может быть использован для обеспечения электропитания датчиков, когда робот находится вблизи датчиков. В этой связи, подобно функционированию RFID-тэга, робот может излучать сигналы, которые могут быть использованы датчиками, близкими к нему, для проведения измерений и передачи измеренных данных к роботу. В некоторых случаях, датчики могут также включать в себя накопитель энергии, который может быть заряжен, обеспечивая, таким образом, датчикам возможность также функционировать, когда робота нет поблизости. Таким образом, например, индуктивная передача энергии может быть выполнена для передачи энергии удаленным средствам в пределах системы. Передача энергии или связь таким образом могут быть выполнены при относительно низких уровнях энергии вследствие близости робота к датчикам или другим устройствам, которые необходимо обеспечить энергией, и/или с которыми необходимо установить связь. Некоторое оборудование для выполнения задач можно также питать энергией таким образом.
В некоторых вариантах осуществления, робот может дополнительно действовать в качестве мобильного датчика. В этой связи, например, робот может нести встроенную камеру, и камера может записывать видеоданные или получать данные в виде изображения, связанные с соответствующими местоположениями или зонами. Данные в виде изображения, дополнительно к их потенциальному использованию в определении местоположений, описанном выше, могут быть проанализированы для определения цвета, размера или длины растительности или могут быть использованы для расширения функций обеспечения безопасности. Информация относительно цвета, размера или длины растительности может быть, затем, использована для определения условий выращивания, воздействующих на растительность.
В некоторых вариантах осуществления, робот может быть снабжен датчиками, способными измерять сопротивление между колесами робота, когда робот перемещается по грунту. Измерения сопротивления могут быть сохранены в связи с местоположением, в котором эти измерения проведены. В качестве альтернативы (или дополнения) к записи сопротивления, может быть записана энергия, необходимая для кошения растительности в разных областях. Данные измерений энергии и/или сопротивления могут быть переданы к устройству 40 управления обслуживанием двора для хранения и сравнения с будущими измерениями, для определения текущих условий, или по меньшей мере относительных изменений в условиях. Устройство 40 управления обслуживанием двора может, затем, настроить команды полива, освещения, внесения удобрений, для модификации условий выращивания соответствующим образом. По существу, робот может быть выполнен с возможностью распознавания схем распределения воды и передачи информацию обратно в системе 10 таким образом, чтобы могла быть обеспечена настройка и калибровка для оптимальной производительности. Кроме того, даже для зон, которые могут не иметь растительности (например, вторая неактивная зона 212), робот может быть выполнен с возможностью выполнения задачи (например, сгребание или подметание вблизи пешеходной дорожки или подъездной дороги).
Другие датчики или функциональные компоненты могут быть также объединены в роботе или, иначе, обеспечены на роботе. Например, температурные датчики, камеры, радиоприемники/радиопередатчики, поливочные средства, устройства для кошения, датчики влажности, датчики освещения, осветительные устройства, и/или что-либо подобное, могут быть включены в состав робота для обеспечения возможности проверок условий, подлежащих выполнению в случайных или конкретно выбранных местоположениях по всему участку 200. Таким образом, робот может действовать в качестве мобильной платформы, способной размещать один или более датчиков и, в некоторых случаях, одно или несколько выполняющих задачи устройств. Однако, как указано выше, робот может также взаимодействовать (или даже питать энергией) с фиксированными датчиками и/или оборудованием для выполнения задач.
По существу, например, полив (или некоторая другая задача) может начаться, и система 10 может использовать сенсорное оборудование 30 в комбинации с функционированием роботизированной самоходной машины 15 для мониторинга распределения воды (или удобрения, и т.д.). Сенсорное оборудование 30 может быть транспортировано в разные местоположения, или могут быть собраны данные в разных местоположениях, посредством роботизированной самоходной машины 15, и, затем, эти данные могут быть использованы для обеспечения обратной связи через устройство 40 управления обслуживанием двора, для обеспечения большего или меньшего полива (или использования других ресурсов) в некоторых областях.
В некоторых случаях, роботизированная самоходная машина 15 может быть выполнена с возможностью синхронизации или определения последовательности в отношении задач, выполняемых на участке 200. Например, кошение может быть прекращено при выполнении полива в данной зоне, или кошение может быть запланировано на конкретное данное время после выполнения полива. Кроме того, поскольку, в некоторых случаях, сенсорное оборудование 30 может детектировать естественный полив (например, дождь) и действие орошения, устройство 40 управления обслуживанием двора может быть выполнено с возможностью управления потреблением ресурсов для оптимизации потребления воды, на основе преобладающих погодных условий. Например, при детектировании события дождя, полив может быть отсрочен. В некоторых случаях, величина события дождя может быть также детектирована таким образом, чтобы отсрочка полива могла быть выполнена на время, которое является пропорциональным принятой величине дождя. В дополнительных примерах, если сеть 50 обеспечивает возможность получения устройством 40 управления обслуживанием двора информации прогноза погоды (например, из интернета), то тогда полив может быть отсрочен, даже если событие дождя еще не произошло (например, если прогнозируют, что событие дождя произойдет в пределах данного периода времени относительно иного, запланированного или, по-видимому, необходимого события полива). Таким образом, например, устройство 40 управления обслуживанием двора может осуществлять доступ к информации о погоде для мест, связанных с местоположением участка 200, или устройство 40 управления обслуживанием двора может быть выполнено с возможностью использования подписки на метеорологические услуги для получения информации о прогнозах.
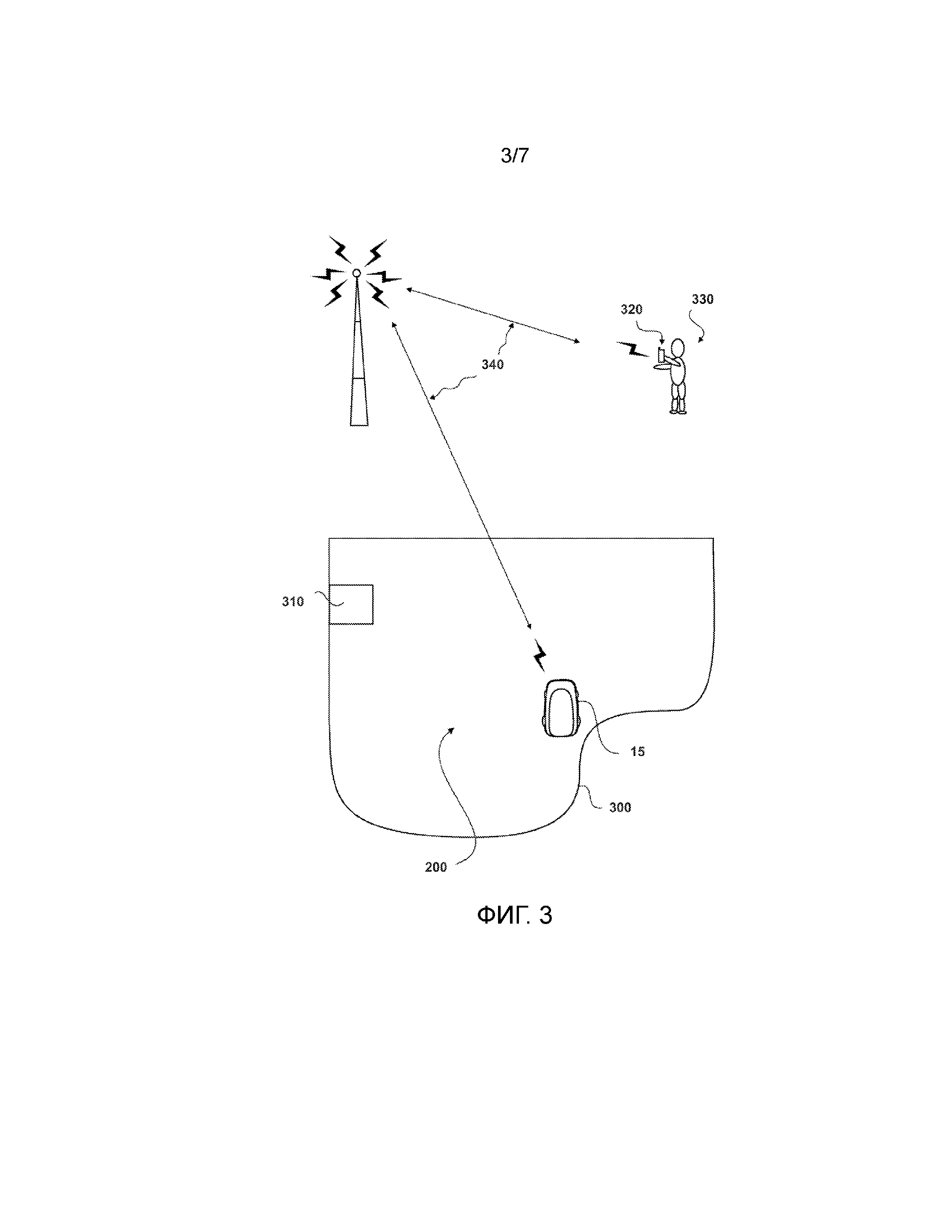
В некотором иллюстративном варианте осуществления, роботизированная самоходная машина 15 может быть выполнена с возможностью функционирования в пределах области, которая определена граничным кабелем. Роботизированная самоходная машина 15, тогда, перемещается в пределах ограниченной области для обеспечения обслуживания всей области. Фиг. 3 иллюстрирует иллюстративные условия эксплуатации для роботизированной самоходной машины 15, которые может использовать система, ограниченная таким граничным кабелем. Роботизированная самоходная машина 15 может быть выполнена с возможностью кошения травы на участке 200 (т.е., земельном участке) или в зоне, границы которой могут быть определены с использованием одной или нескольких физических границ (например, забора, стены, ограждения и/или чего-либо подобного), изученных позиционных границ, граничного кабеля 300 или их комбинации. Граничный кабель 300 может излучать электрические сигналы, которые являются детектируемыми посредством роботизированной самоходной машины 15 для информирования роботизированной самоходной машины 15 о достижении границы участка 200 (или зоны). Роботизированной самоходной машиной 15 можно управлять, по меньшей мере частично, посредством встроенных схем обработки. Схемы обработки могут включать в себя, среди прочего, способность детектировать граничный кабель 300 для перенаправления роботизированной самоходной машины 15 в другие области в пределах участка 200. Схемы обработки могут также управлять модулем позиционирования, который использует GPS, триангуляцию радиомаяков, одометрию или другое средство для определения местоположения (например, свое собственное, или местоположение найденных устройств).
В иллюстративном варианте осуществления, роботизированная самоходная машина 15 может питаться энергией от аккумуляторных батарей, посредством одной или нескольких перезаряжаемых аккумуляторных батарей. Таким образом, роботизированная самоходная машина 15 может быть выполнена с возможностью возвращения к зарядной станции 310, которая может быть расположена в некотором местоположении на участке 200, для подзарядки аккумуляторных батарей. Аккумуляторные батареи могут питать энергией приводную систему и функциональную систему управления роботизированной самоходной машины 15. Однако, схемы управления роботизированной самоходной машины 15 могут селективно управлять приложением электропитания или другими управляющими сигналами для приводной системы и/или функциональной системы управления для управления функционированием приводной системы и/или функциональной системы управления. Таким образом, перемещением и функционированием роботизированной самоходной машины 15 на участке 200 можно управлять посредством схем управления таким способом, который обеспечивает возможность роботизированной самоходной машине 15 систематически обходить участок 200 при функционировании для выполнения функции на рабочей области участка 200. В некоторых вариантах осуществления, схемы управления могут быть выполнены с возможностью установления связи беспроводным способом с электронным устройством 320 (например, компьютером, мобильным телефоном, PDA, смартфоном, и/или чем-либо подобным) удаленного оператора 330 через каналы 340 связи беспроводной коммуникационной сети (например, сети 50).
В некоторых вариантах осуществления, роботизированная самоходная машина 15 может дополнительно включать в себя механического оператора некоторого типа. В этой связи, например, разбрызгиватели некоторых вариантов осуществления могут быть осуществлены в виде кранов для орошения, которые могут быть механически включены или выключены механическим оператором роботизированной самоходной машины 15. В таком варианте осуществления, под управлением, роботизированная самоходная машина 15 может переместиться к местоположению одного или более механических кранов, которые подлежат включению (или выключению), и роботизированная самоходная машина 15 может сцепить соответствующие краны для орошения с механическим оператором для получения необходимого результата. Таким образом, в различных иллюстративных вариантах осуществления, роботизированная самоходная машина 15 может взаимодействовать с разбрызгивателями, клапанами, исполнительными механизмами, кранами, и т.д., либо механическим, либо электрическим способом, для включения или выключения таких устройств, в качестве реакции на команду устройства 40 управления обслуживанием двора, на основе распознанных условий.
Таким образом, роботизированная самоходная машина 15 может быть выполнена с возможностью содействия деятельности, относящейся к сбору данных (с обеспечением маломощной связи ближнего действия или другой связи ближнего действия), обеспечению электропитания, прямому выполнению задач и непрямому выполнению задач (например, посредством управления оборудованием электрическими или механическими способами). Таким образом, может быть обеспечена минимизация потребности в замене аккумуляторных батарей или потребления энергии. Кроме того, при обеспечении способности роботизированной самоходной машины 15 действовать в качестве мобильного датчика, в некоторых случаях, можно использовать роботизированную самоходную машину 15 только в качестве датчика или платформы распознающего устройства, в пределах системы 10. Роботизированная самоходная машина 15 может содействовать размещению устройств в пределах системы посредством технологий детектирования и калибровки, посредством обеспечения обратной связи относительно распределения воды или других изменяющих условия выращивания ресурсов на участке 200.
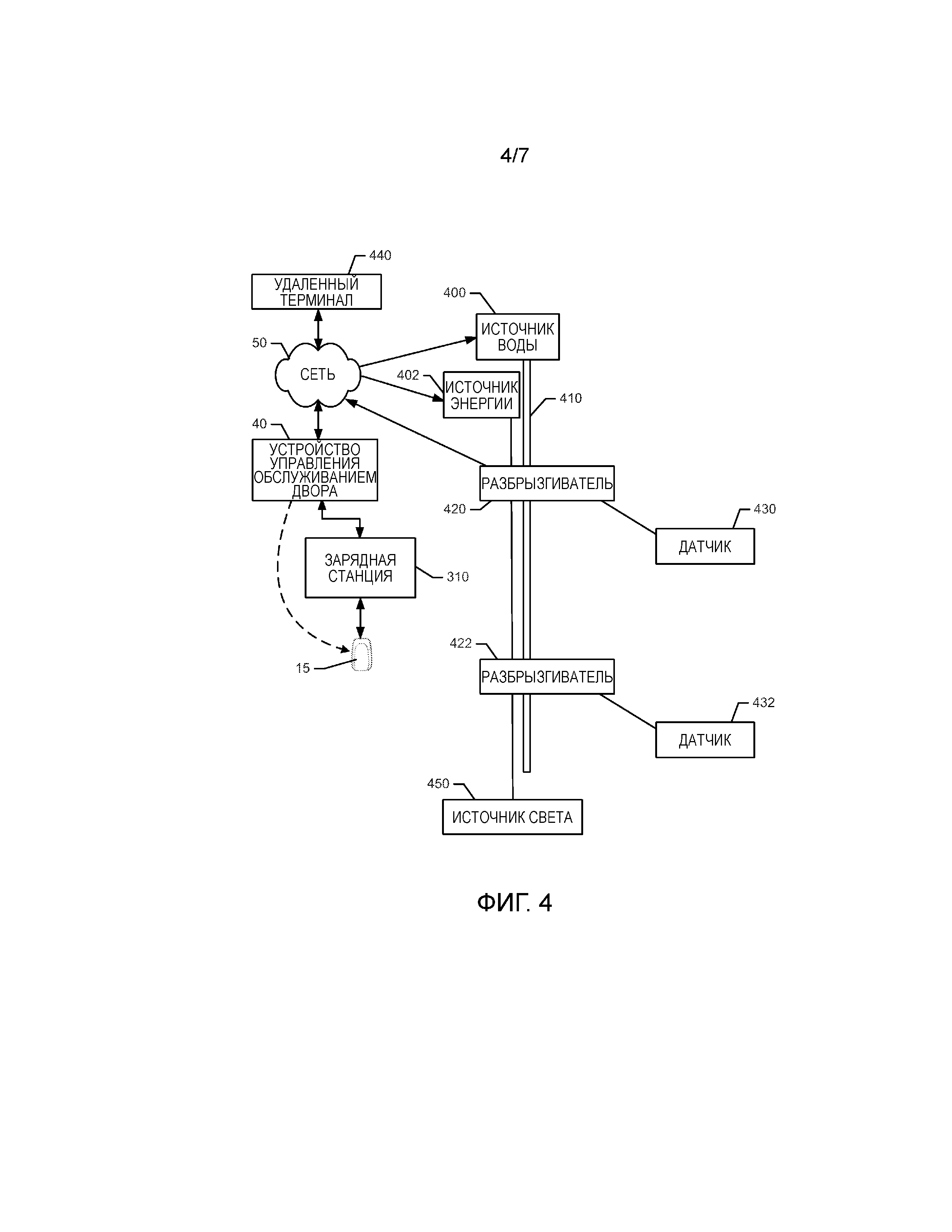
Фиг. 4 показывает простой путь миграции воды, который может быть осуществлен на практике в связи с иллюстративным вариантом осуществления. Как показано на фиг. 4, источник 400 воды может быть использован для наполнения линии 410 подачи воды. Первый разбрызгиватель 420 и второй разбрызгиватель 422 могут принимать воду из линии 410 подачи воды. Линия 410 подачи воды может быть селективно выполнена с возможностью обеспечения воды для разбрызгивания из первого и второго разбрызгивателей 420 и 422. В этом примере, источник 402 энергии может быть также обеспечен для различных системных компонентов. В некоторых случаях, источник 402 энергии может питать энергией разбрызгиватели, исполнительные механизмы разбрызгивателей и/или датчики системы (включая первый датчик 430 и второй датчик 432). Как показано на фиг. 4, устройство 40 управления обслуживанием двора может установить связь с роботизированной самоходной машиной 15 либо напрямую через беспроводный канал связи, либо через зарядную станцию 310 при стыковке. Оператор может также взаимодействовать с системой через сеть с использованием удаленного терминала 440. Другими системными компонентами (например, источником 450 света) также можно управлять, согласно некоторым иллюстративным вариантам осуществления.
В иллюстративном варианте осуществления, память 114 может хранить (или процессор 112 может, иначе, осуществлять доступ) базу данных (например, базу данных идентификаторов растений), описанную выше. Такая база данных может коррелировать некоторые растения с соответствующими условиями выращивания, которые являются идеальными или предпочтительными для оптимального роста. Как описано выше, текущие условия можно контролировать посредством сенсорного оборудования 30 и сравнивать с информацией в базе данных для определения любого корректирующего действия, которое следует предпринять посредством оборудования 20 для выполнения задач. Сниженные затраты и уменьшенное воздействие на окружающую среду могут быть, таким образом, обеспечены при достижении более оптимальных условий выращивания.
В некоторых случаях, устройство 40 управления обслуживанием двора может предпринять автоматическое действие для улучшения условий выращивания, посредством управления поливом, внесением удобрений, кошением, освещением или другой деятельностью, на основе определения того, что текущие условия не являются оптимальными. Однако, в других ситуациях, устройство 40 управления обслуживанием двора может быть выполнено с возможностью обеспечения предупредительного сигнала или команд, локально или посредством смартфона или другого удаленного устройства, для отдания команд или иного информирования собственника/оператора о том, некоторые изменения текущих условий могут быть целесообразными. Могут быть идентифицированы конкретные рекомендуемые действия, или может быть обеспечен предупредительный сигнал для проверки некоторых условий. Могут быть также использованы данные камеры для активации некоторых компонентов, чтобы прогнать нежелательных диких животных, при некоторых обстоятельствах. Таким образом, относительно надежная система для управления условиями обслуживания двора (например, условиями обслуживания сада и газона) может быть обеспечена в автоматическом режиме. Результат, можно считать, функционирует в качестве «интеллектуального сада», который обеспечивает эффективное управление для обеспечения оптимальных условий выращивания.
В некоторых вариантах осуществления, оператор может взаимодействовать с устройством 40 управления обслуживанием двора посредством пользовательских интерфейсов, описанных в настоящем документе, или посредством удаленного терминала 131. Некоторые элементы оборудования 20 для выполнения задач могут также иметь пользовательские интерфейсы. Например, система полива может включать в себя один или более разбрызгивателей с общим блоком управления, который рассматривается в качестве части оборудования 20 для выполнения задач. Конфигурацией общего блока управления или другого такого конкретного оборудования можно управлять локально на оборудовании и, затем, передавать ее к устройству 40 управления обслуживанием двора для внесения в базу данных конфигураций системы. Таким образом, могут существовать дополнительные пользовательские интерфейсы, сверх или кроме тех, которые описаны в настоящем документе.
В некоторых вариантах осуществления, устройство 40 управления обслуживанием двора может быть дополнительно выполнено с возможностью включения в состав схем 41 управления оборудованием для выполнения задач, как показано в примере фиг. 5. Схемы 41 управления оборудованием для выполнения задач могут быть осуществлены в виде или посредством отдельного процессора или могут быть осуществлены посредством конфигурирования схем 110 обработки устройства 40 управления обслуживанием двора. В любом случае, схемы 41 управления оборудованием для выполнения задач могут взаимодействовать с оборудованием 20 для выполнения задач либо напрямую, либо через сеть 50, как показано на фиг. 5.
Варианты осуществления данного изобретения могут быть, таким образом, осуществлены на практике с использованием устройства, такого как устройство, показанное на фиг. 1. Однако другие варианты осуществления могут быть осуществлены на практике в связи с компьютерным программным продуктом для выполнения вариантов осуществления данного изобретения. По существу, например, каждый блок или этап последовательностей операций фиг. 6, и комбинации блоков в последовательности операций, могут быть реализованы различными средствами, такими как аппаратное обеспечение, аппаратно-программное обеспечение, процессор, схемы и/или другое устройство, связанное с исполнением программного обеспечения, включающего в себя одну или несколько команд компьютерных программ. Таким образом, например, одна или несколько процедур, описанных выше, могут быть осуществлены посредством команд компьютерных программ, которые могут осуществлять процедуры, описанные выше, и могут храниться в запоминающем устройстве (например, памяти 114) и могут исполняться схемами обработки (например, процессором 112).
Следует понимать, что любые такие хранящиеся команды компьютерных программ могут быть загружены в компьютер или другое программируемое устройство (т.е., аппаратное средство) для создания машины, таким образом, чтобы команды, которые исполняются на компьютере или другом программируемом аппарате, реализовали функции, заданные в блоке (блоках) или на этапе (этапах) последовательности операций. Эти команды компьютерных программ могут также храниться на машиночитаемом носителе, содержащем память, которая может управлять компьютером или другим программируемым устройством для обеспечения его функционирования конкретным образом, таким образом, чтобы команды, хранящиеся в машиночитаемой памяти, создавали изделие, включающее в себя команды для реализации функции, заданной в блоке (блоках) или на этапе (этапах) последовательности операций. Команды компьютерных программ могут быть также загружены в компьютер или другое программируемое устройство для обеспечения выполнения последовательности операционных этапов на компьютере или другом программируемом устройстве, для создания реализуемого на компьютере процесса таким образом, чтобы команды, которые исполняются на компьютере или другом программируемом устройстве, обеспечивали этапы для реализации функций, заданных в блоке (блоках) или на этапе (этапах) последовательности операций. В этой связи, способ, согласно иллюстративным вариантам осуществления данного изобретения, может включать в себя любые или все операции, показанные на фиг. 6. Кроме того, другие способы, полученные из описаний, приведенных в настоящем документе, могут быть также выполнены в качестве реакции на исполнение этапов, связанных с такими способами, посредством компьютера, выполненного с возможностью преобразования в машину, конкретно, выполненную с возможностью выполнения таких способов.
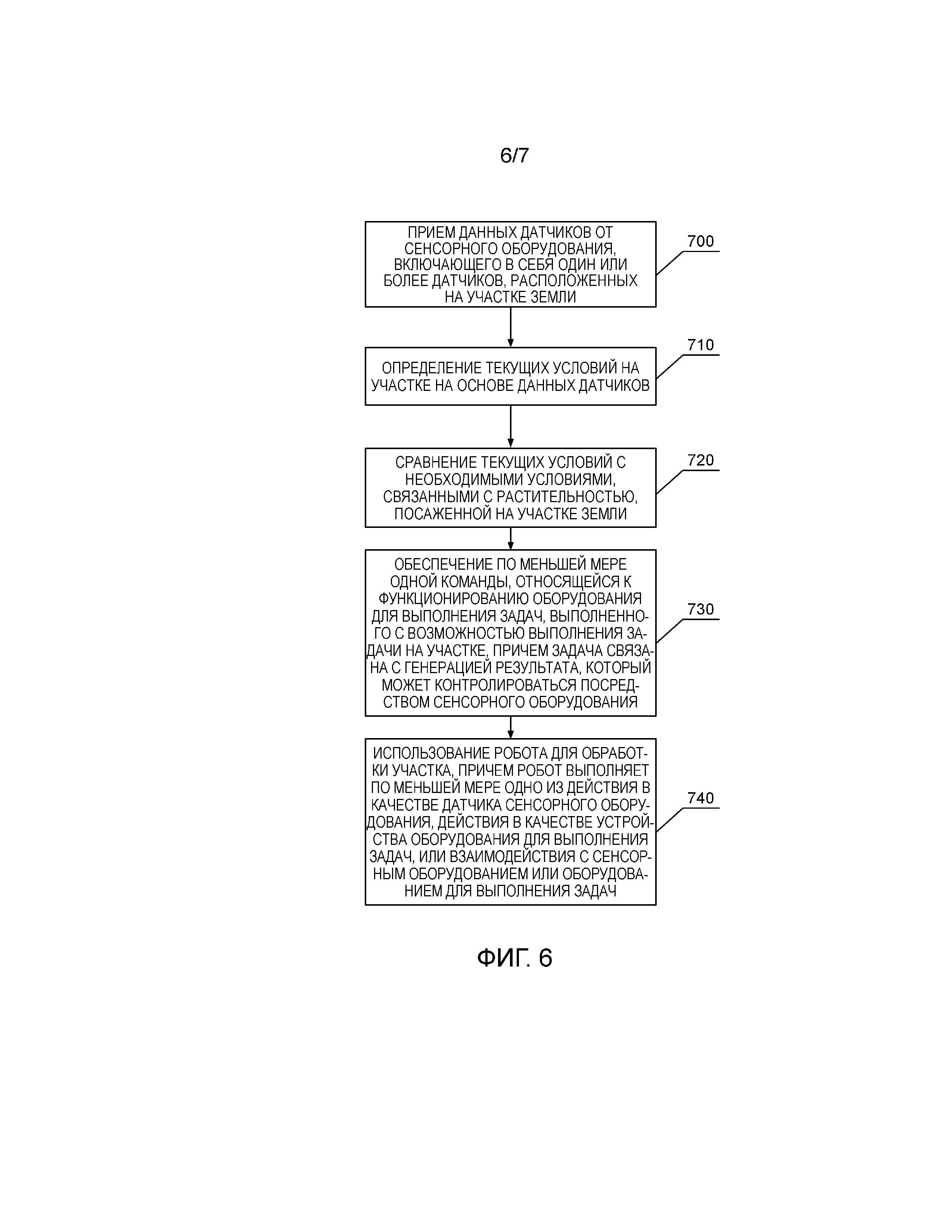
В иллюстративном варианте осуществления, способ для обеспечения управления интеллектуальным садом, как показано на фиг. 6, может включать в себя прием данных датчиков от сенсорного оборудования, включающего в себя один или более датчиков, расположенных на участке земли, в операции 700, определение текущих условий на участке на основе данных датчиков, в операции 710, сравнение текущих условий с необходимыми условиями, связанными с растительностью, посаженной на участке земли, в операции 720, и обеспечение по меньшей мере одной команды, относящейся к функционированию оборудования для выполнения задач, выполненного с возможностью выполнения задачи на участке, причем задача связана с генерацией результата, который может контролироваться посредством сенсорного оборудования, в операции 730. Способ может дополнительно включать в себя использование робота для обработки участка, причем робот выполняет по меньшей мере одно из действия в качестве датчика сенсорного оборудования, действия в качестве устройства оборудования для выполнения задач, или взаимодействия с сенсорным оборудованием или оборудованием для выполнения задач, в операции 740.
В иллюстративном варианте осуществления, устройство для выполнения вышеупомянутого способа фиг. 6 может содержать процессор (например, процессор 112), выполненный с возможностью выполнения некоторых или каждой из операций (700-740), описанных выше. Процессор 112 может быть, например, выполнен с возможностью выполнения операций (700-740) посредством выполнения аппаратно-реализованных логических функций, исполнения хранящихся команд, или исполнения алгоритмов для выполнения каждой из операций. Альтернативно, устройство может содержать средство для выполнения каждой из операций, описанных выше. В этой связи, согласно иллюстративному варианту осуществления, примеры средства для выполнения операций 700-740 могут содержать, например, устройство 40 управления обслуживанием двора. Дополнительно или альтернативно, по меньшей мере посредством того факта, что процессор 112 может быть выполнен с возможностью управления, или даже осуществлен в виде устройства 40 управления обслуживанием двора, процессор 112 и/или устройство или схемы для исполнения команд или исполнения алгоритма для обработки информации, как описано выше, могут также образовать иллюстративное средство для выполнения операций 700-740.
В некоторых вариантах осуществления, дополнительные необязательные операции могут быть включены, или операции, описанные выше, могут быть модифицированы или дополнены. Каждая из дополнительных операций, модификаций или дополнений может быть осуществлена на практике в комбинации с вышеупомянутыми операциями и/или в комбинации друг с другом. Таким образом, некоторые, все или никакие из дополнительных операций, модификаций или дополнений, описанных в настоящем документе, могут быть использованы в некоторых вариантах осуществления. В этой связи, в некоторых случаях, участок может быть разделен на множество зон, и каждая зона может быть связана по меньшей мере с одним датчиком и по меньшей мере одним устройством оборудования для выполнения задач. В некоторых случаях, устройство управления обслуживанием двора может включать в себя схемы обработки, хранящие картографические данные, описывающие участок, и каждая из зон определена посредством соответствующего географического описания, относящегося к картографическим данным. В иллюстративном варианте осуществления, каждая из зон может быть связана с данными о растениях, соответствующими по меньшей мере одному растению в пределах соответствующей одной их зон, и данные о растениях могут определять необходимые параметры для роста по меньшей мере одного растения. В некоторых вариантах осуществления, устройство управления обслуживанием двора может сравнивать условия, измеренные по меньшей мере одним датчиком конкретной зоны, с данными о растениях, связанными с конкретной зоной, для определения того, следует ли управлять оборудованием для выполнения задач, относящимся к конкретной зоне, для изменения условий в конкретной зоне. В некоторых вариантах осуществления, сенсорное оборудование может питаться энергией от робота, в качестве реакции на прохождение робота в пределах заданного расстояния от соответствующих устройств сенсорного оборудования. В некоторых примерах, сенсорное оборудование может устанавливать связь с роботом в качестве реакции на прохождение робота в пределах заданного расстояния от соответствующих устройств сенсорного оборудования. В иллюстративном варианте осуществления, робот может функционировать относительно границы, определяемой граничным кабелем, и граничный кабель может быть использован для питания энергией по меньшей мере одного датчика сенсорного оборудования. В некоторых вариантах осуществления, робот выполнен с возможностью детектирования информации, указывающей на местоположения средств среди сенсорного оборудования или оборудования для выполнения задач, и передачи детектированной информации к устройству управления обслуживанием двора для обеспечения возможности определения устройством управления обслуживанием двора местоположений средств, относящихся к участку. В некоторых случаях, робот выполнен с возможностью переноса по меньшей мере одного датчика сенсорного оборудования и/или выполнен в качестве устройства оборудования для выполнения задач. В иллюстративном варианте осуществления, устройство управления обслуживанием двора может быть выполнено с возможностью синхронизации или определения последовательности функционирования разных типов устройств оборудования для выполнения задач.
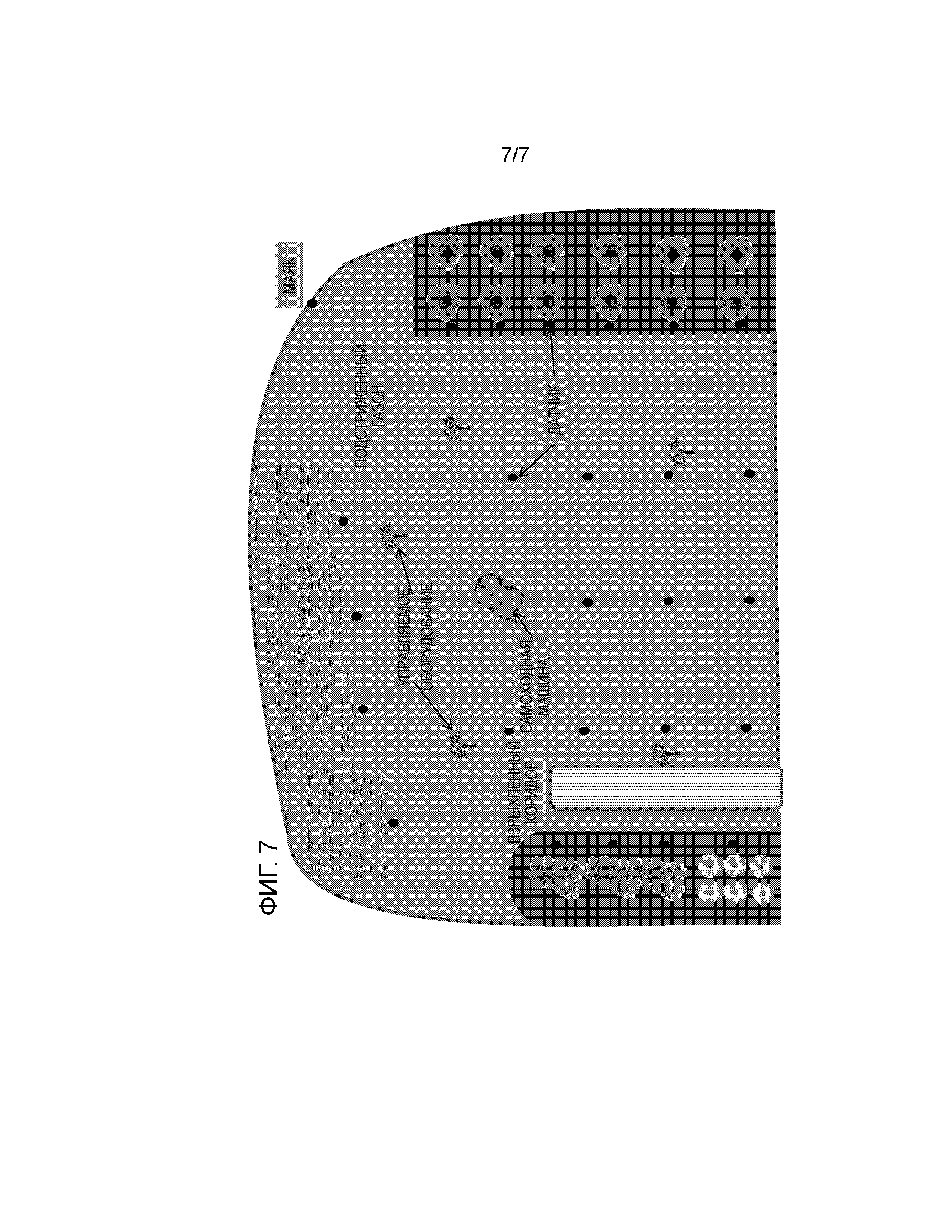
Фиг. 7 иллюстрирует схему участка с множеством средств на нем, которыми можно управлять с использованием иллюстративного варианта осуществления. В этой связи, фиг. 7 иллюстрирует разные типы растений на разных участках соответствующих садов. Каждое растение (или тип растений) имеет датчик, связанный с ним. Датчики также распределены по всему двору. Между тем, некоторое количество иллюстративных элементов управляемого оборудования (например, разбрызгиватели) распределены по всему участку. Участок ограничен кабелем, а также включает в себя маяк, который может быть использован в качестве опорной точки для определения расстояния и определения местоположения роботизированной самоходной машиной. Самоходная машина может взаимодействовать с датчиками для питания их энергией и/или приема от них информации датчиков. Самоходная машина может также взаимодействовать с управляемым оборудованием для электронного или механического приведения в действие управляемого оборудования. Таким образом, кошением, сгребанием, поливом и другой деятельностью можно управлять или содействовать с использованием самоходной машины. В этой связи, трава может быть скошена и/или полита на основе функционирования самоходной машины. Между тем, взрыхленный коридор может быть обеспечен на основе функционирования самоходной машины, и различные растения (кусты, цветы, деревья, и т.д.) могут также быть политы или удобрены на основе функционирования самоходной машины. Как описано выше, многочисленные другие виды деятельности могут быть также выполнены самоходной машиной для содействия эффективному и экономичному обслуживанию двора (например, деятельность по обслуживанию газона и сада).
Многочисленные модификации и другие варианты осуществления изобретений, изложенных в настоящем документе, придут на ум специалистам в данной области техники, к которым эти изобретения имеют отношение, причем многочисленные модификации и другие варианты осуществления будут выгодными благодаря принципам, представленным в предшествующем описании и соответствующих чертежах. Таким образом, следует понимать, что данные изобретения не должны быть ограничены конкретными описанными вариантами осуществления, и что предполагается, что модификации и другие варианты осуществления должны быть включены в объем приложенной формулы изобретения. Кроме того, хотя предшествующее описание и соответствующие чертежи описывают иллюстративные варианты осуществления в контексте некоторых иллюстративных комбинаций элементов и/или функций, следует понимать, что другие комбинации элементов и/или функций могут быть обеспечены посредством альтернативных вариантов осуществления, не выходя за рамки объема приложенной формулы изобретения. В этой связи, например, другие комбинации элементов и/или функций, отличные от комбинаций элементов и/или функций, явно описанных выше, как предполагается, также могут предполагаться в некоторых пунктах приложенной формулы изобретения.
В случаях, когда в настоящем документе описаны преимущества, выгода или решения проблем, следует понимать, что такие преимущества, выгода и/или решения могут быть применимы к некоторым иллюстративным вариантам осуществления, но необязательно ко всем иллюстративным вариантам осуществления. Таким образом, любые преимущества, выгода или решения, описанные в настоящем документе, не должны рассматриваться в качестве незаменимых, необходимых или существенных во всех вариантах осуществления или в тех вариантах осуществления, которые заявлены в настоящем документе. Хотя в настоящем документе использованы конкретные термины, они использованы только в общем и описательном смысле, а не в целях ограничения.
Реферат
Группа изобретений относится к садоводству, а именно к системам управления для обслуживания земельного участка. Система включает в себя сенсорное оборудование, оборудование для выполнения задач, устройство управления обслуживанием двора и робота. Сенсорное оборудование включает в себя один или более датчиков, расположенных на участке земли. Оборудование для выполнения задач выполнено с возможностью выполнения задачи на этом участке. Задача связана с генерацией результата, который контролируется посредством сенсорного оборудования. Устройство управления обслуживанием двора выполнено с возможностью взаимодействия с сенсорным оборудованием и оборудованием для выполнения задач для сравнения измеренных условий с необходимыми условиями, для управления функционированием оборудования для выполнения задач. Робот выполнен с возможностью обработки участка и выполнения по меньшей мере одного из действия в качестве одного из одного или более датчиков, действия в качестве устройства оборудования для выполнения задач, или взаимодействия с сенсорным оборудованием или оборудованием для выполнения задач. Использование группы изобретений позволит автоматизировать управление обслуживания земельного участка. 3 н. и 22 з.п. ф-лы, 7 ил.
Комментарии