Самоходная уборочная машина с жаткой и способ управления жаткой - RU2630230C2
Код документа: RU2630230C2
Чертежи
Описание
Область техники, к которой относится изобретение
Предлагаемое изобретение относится к самоходной уборочной машине, например зерноуборочному комбайну, кормоуборочному комбайну, тюковому прессу или подобной машине, с жаткой, которая может перемещаться относительно кузова уборочной машины при помощи исполнительного механизма, что позволяет срезать и собирать убираемую культуру, по существу, на постоянном расстоянии от земли, даже если поле, на котором стоит культура и по которому движется уборочная машина, неровное.
Уровень техники
Подобная уборочная машина описана в патентной заявке DE 3807610 A1.
В этой известной уборочной машине на боковых оконечностях жатки или жатвенной части расположены эластично прижимающиеся к грунту скобы-копиры, которые могут поворачиваться вокруг оси. Положение этих скоб указывает расстояние от жатки до грунта, с которым соприкасаются скобы-копиры. Для определения положения каждой из скоб предусмотрен датчик высоты. Правый и левый исполнительный механизм удерживают жатку на корпусе. К каждому из этих исполнительных механизмов присоединен потенциометр, положение которого зависит от силы реакции опоры, прилагаемой соответствующим исполнительным механизмом к жатке. Пока уборочная машина движется по ровному грунту, сила реакции опоры будет постоянной.
На практике грунт, по которому движется уборочная машина, является неровным в большей или меньшей степени. Если на грунте имеется возвышение, размеры которого в направлении, перпендикулярном направлению движения, невелики, то передняя кромка жатки может столкнуться с возвышением, так как скобы-копиры не смогут распознать его. Столкновение жатки с грунтом возможно также в том случае, если крутизна возвышения настолько высока, что передняя кромка жатки сталкивается с ним еще до того, как скоба-копир распознает возвышение и отведет жатку от него.
Каждый контакт жатки с возвышением грунта приводит к уменьшению силы реакции опоры, прилагаемой исполнительными механизмами к жатке. Такое уменьшение распознается потенциометрами давления на грунт, установленными на исполнительных механизмах. Управляющее устройство получает сигнал фактического значения, складывающийся из измерительных сигналов датчиков высоты и потенциометров давления на грунт, и на основании полученного сигнала активизирует гидравлический исполнительный механизм. Дополнительное наложение сигналов датчиков высоты и потенциометров давления на грунт позволяет вести жатку таким образом, чтобы жатка преодолевала возвышения грунта даже в том случае, если они не распознаются датчиками высоты.
Недостаток этой известной уборочной машины состоит в том, что колебания кузова относительно поперечной оси, возникающие при преодолении уборочной машиной неровностей почвы, оказывают значительное влияние на силы реакции опоры, определяемые потенциометрами давления на грунт. Однако подобные продольные колебания возникают только тогда, когда колеса уборочной машины переходят через неровность почвы, то есть когда жатка уже миновала неровность почвы. Если управляющее устройство попытается компенсировать изменение силы реакции опоры, обусловленное таким продольным колебанием, то существует риск того, что предпринимаемое при этом изменение высоты жатки приведет к повторному контакту с грунтом или, в наиболее благоприятном случае, к нежелательным колебаниям высоты среза после преодоления неровности почвы. Чтобы избежать такой опасности, скорость реакции известного управляющего устройства не должна быть слишком высокой. Однако, чем ниже скорость реакции, тем выше вероятность того, что жатка соприкоснется с возвышением грунта, так как ее высота, даже в случае распознавания возвышения грунта скобами-копирами, не будет своевременно изменена. Таким образом, уровень техники в самом лучшем случае позволяет добиться лишь компромисса между противоречащими друг другу требованиями к стабильности и высокой скорости реакции.
Блоки сравнения, применяющиеся в известной управляющей схеме, имеют только два исходных состояния, соответственно, управляемые ими клапаны, снабжающие рабочей жидкостью исполнительные механизмы, могут быть либо открыты, либо закрыты. Когда машина приближается к ложбине и скобы-копиры распознают увеличение высоты среза, жатка должна быть опущена. Когда управляющее устройство открывает с этой целью клапаны, через которые рабочая жидкость стекает из исполнительных механизмов, возникает резкое снижение давления, которое потенциометры давления на грунт не сразу отличают от снятия нагрузки, обусловленного контактом жатки с грунтом. Для противодействия такому снятию нагрузки управляющее устройство должно поднять жатку. При этом замедляется реагирование на изменение высоты среза.
Раскрытие изобретения
Задачей изобретения является разработка уборочной машины и способа управления жаткой уборочной машины, которые позволят совместить требования к стабильности и высокой скорости реакции в большей степени, чем это имеет место на уровне техники.
Эта задача решается, во-первых, самоходной уборочной машиной, которая содержит жатку, по меньшей мере, один гидравлический исполнительный механизм для регулировки высоты среза жатки, по меньшей мере, один датчик высоты, измеряющий высоту среза, по меньшей мере, один датчик давления, измеряющий давление рабочей жидкости на исполнительном механизме, и управляющее устройство, активизирующее исполнительный механизм на основании показаний датчика высоты и датчика давления, причем управляющее устройство разделено на первый регулирующий контур, генерирующий сигнал коррекции высоты на основании фактической высоты среза, измеренной датчиком высоты, и заданной высоты среза, и второй регулирующий контур, который предназначен для регулирования давления на исполнительном механизме и заданное значение которого изменяется в зависимости от изменения сигнала коррекции высоты. Давление, действующее на гидравлический исполнительный механизм, может очень быстро доводиться до нужного уровня при возникновении необходимости в регулировании, не вызывая дестабилизации жатки. Это обусловлено тем, что повышение или понижение давления не влечет за собой пропорциональное изменение высоты жатки, а только определяет скорость, с которой рабочая жидкость поступает в исполнительный механизм или вытекает из него, и тем самым скорость, изменения высоты жатки. Кроме того, можно компенсировать продольные колебания уборочной машины и вызываемые ими колебания фактического давления, не оказывая влияния на первый регулирующий контур. Поэтому устраняется риск нестабильности сигнала коррекции давления, обусловленной быстрым изменением давления.
Время реакции второго регулирующего контура меньше, чем время реакции первого регулирующего контура. При этом быстрая и четкая реакция второго регулирующего контура на отклонения заданного давления может достигаться, в частности, за счет того, что второй регулирующий контур выполнен в виде пропорционального регулятора.
Напротив, первый регулирующий контур целесообразным образом может быть выполнен в виде пропорционального интегрального регулятора или может переключаться между режимами пропорционального регулятора и пропорционального интегрального регулятора.
Предпочтительно, первый регулирующий контур имеет вход обратной связи, соединенный с выходом второго регулирующего контура, и настроен таким образом, чтобы интегральная составляющая сигнала коррекции высоты подавлялась, когда сигнал коррекции давления, генерируемый вторым регулирующим контуром, достигает предварительно заданного предельного значения. При этом учитывается тот факт, что когда клапан, активизирующийся сигналом коррекции давления, достигает полностью открытого состояния, дальнейшее повышение сигнала коррекции высоты за счет его интегральной составляющей более не сможет ускорять перемещение исполнительного механизма. Если допустить дальнейшее увеличение интегральной составляющей в этом состоянии, то в дальнейшем придется снова плавно уменьшать эту составляющую и клапан среагирует на опускание сигнала коррекции давления ниже предельного значения лишь с известной задержкой. Такую задержку можно предотвратить или, по меньшей мере, сократить за счет подавления интегральной составляющей.
Предпочтительно, второй регулирующий контур управляет исполнительным механизмом посредством, по меньшей мере, одного пропорционального клапана, то есть клапана, проходное сопротивление которого пропорционально поступившему сигналу коррекции давления.
Чтобы свести к минимуму задержку между изменением сигнала коррекции давления и реакцией пропорционального клапана на это изменение, целесообразно подвести рабочую жидкость к закрытому клапану.
Оператор должен иметь возможность регулировать заданную высоту среза жатки при помощи устройства ввода. Такое устройство ввода позволяет очень резко изменять заданную высоту среза, что, в свою очередь, может повлечь за собой быстрое изменение давления на исполнительном механизме. Если при достижении новой заданной высоты среза отток или приток рабочей жидкости на исполнительном механизме резко останавливается, то возникающая при этом задержка срабатывания исполнительного механизма может привести к нежелательным, нагружающим материал скачкам давления и продольным колебаниям корпуса машины. Чтобы избежать этого, вход первого регулирующего контура, назначенный заданной высоте среза, может быть соединен с устройством ввода, целесообразно, посредством фильтра нижних частот.
Кроме того, задача решается способом управления жаткой самоходной уборочной машины, который включает следующие этапы:
a) определение фактической высоты среза жатки и выведение сигнала коррекции высоты на основании фактической и заданной высоты среза;
b) определение фактического давления на исполнительном механизме, поддерживающем жатку, и выведение сигнала коррекции давления на основании фактического давления, заданного давления и сигнала коррекции высоты;
c) регулирование давления на гидравлическом исполнительном механизме на основании сигнала коррекции давления.
Предпочтительно, на этапе с) пропускная способность, по меньшей мере, одного пропорционального клапана регулируется пропорционально сигналу коррекции давления.
Краткое описание графических материалов
Прочие признаки и преимущества изобретения следуют из приведенного ниже описания вариантов исполнения с учетом прилагаемых фигур, на которых изображено:
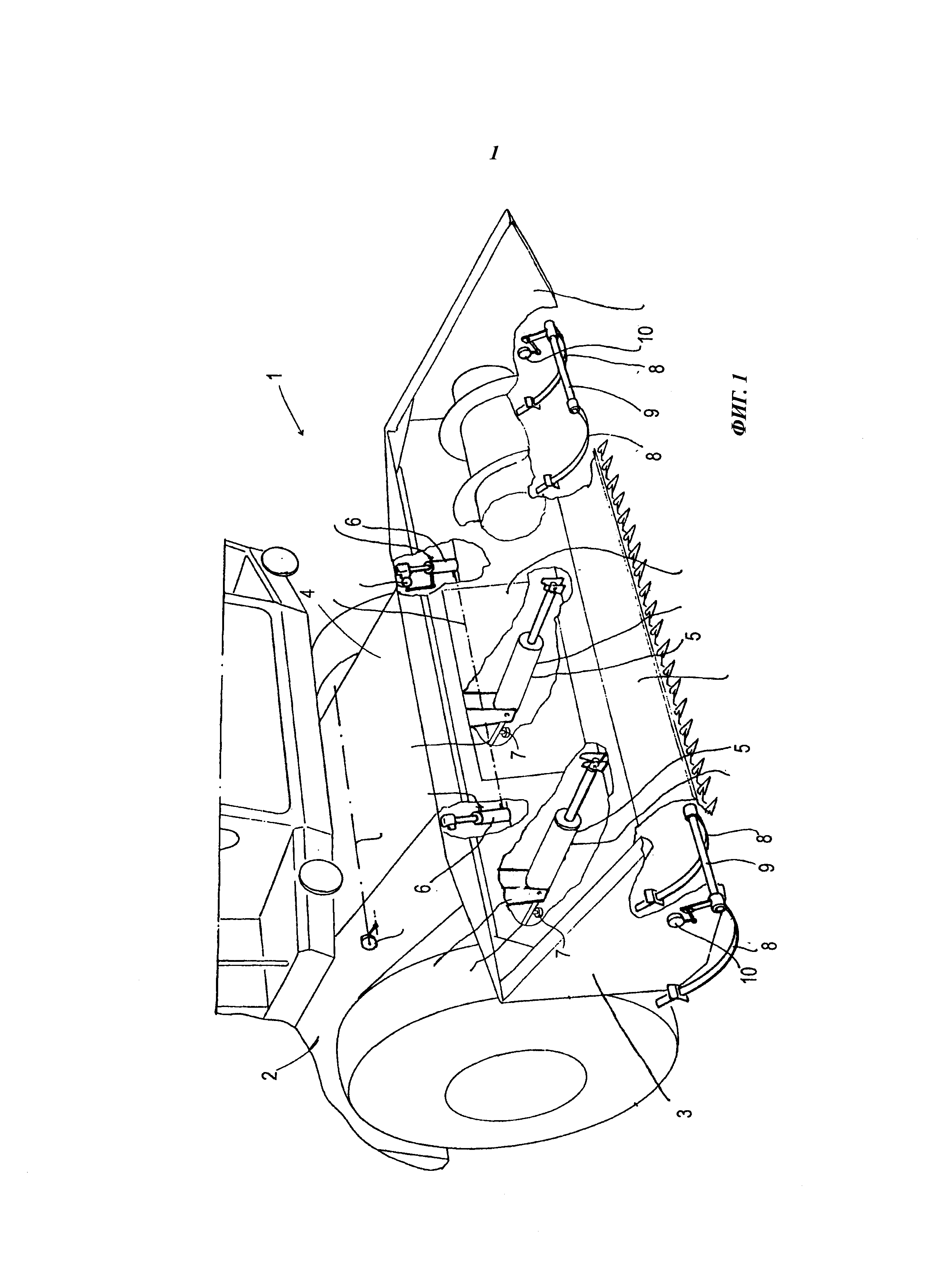
Фигура 1: перспективный вид фрагмента самоходной уборочной машины.
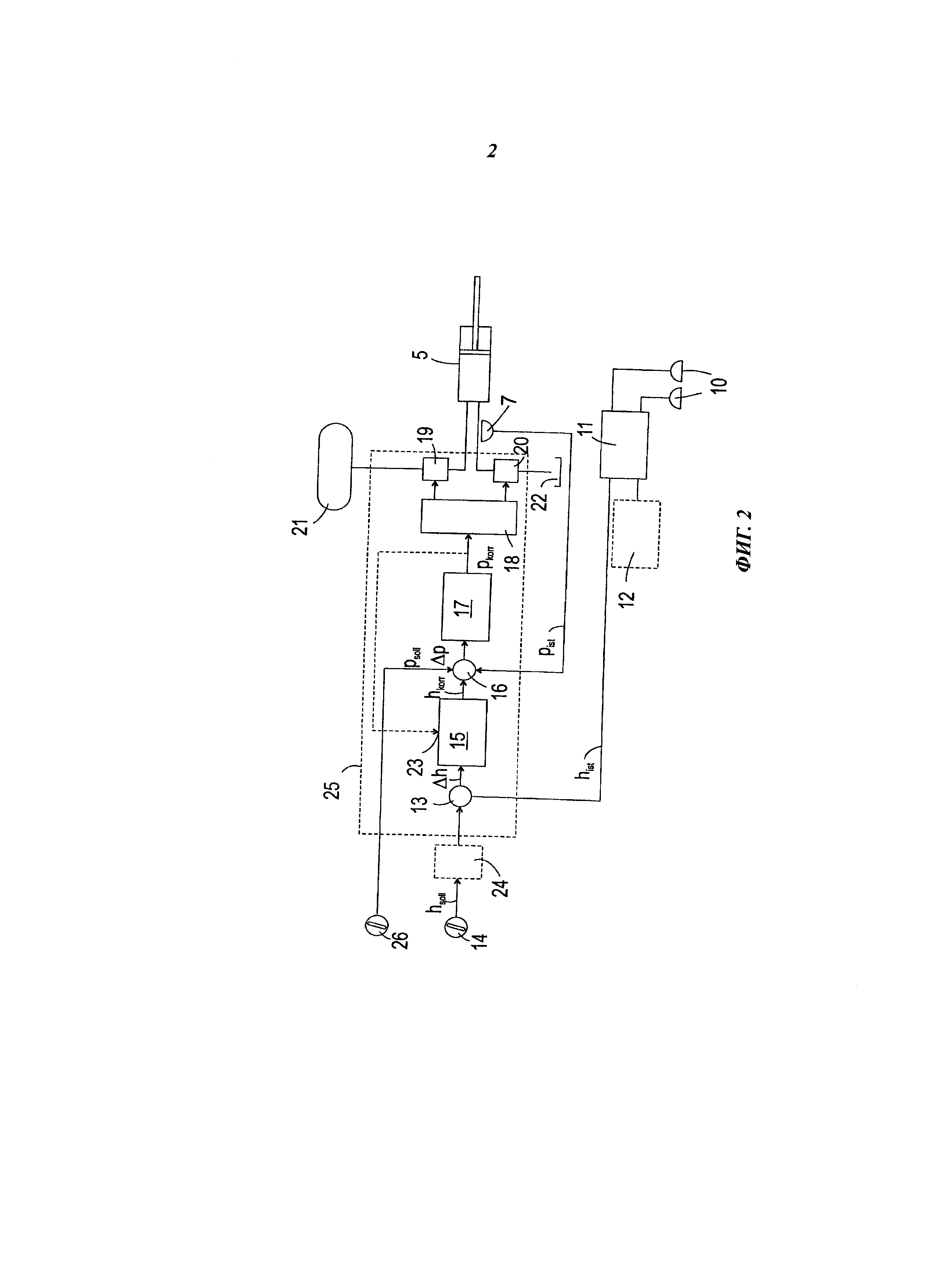
Фигура 2: блок-схема управляющего устройства, предназначенного для регулирования высоты жатки уборочной машины.
Осуществление изобретения
На фигуре 1 представлен перспективный вид фрагмента описываемой изобретением самоходной уборочной машины 1, в данном случае зерноуборочного комбайна. На фигуре видна передняя часть кузова 2 и жатка 3, которая соединена с кузовом 2 посредством наклонного транспортера 4. Наклон транспортера и тем самым высота жатки 3 над грунтом может регулироваться при помощи двух гидравлических исполнительных механизмов 5, которые одной стороной крепятся к кузову 2, а другой стороной - к передней оконечности наклонного транспортера 4. Датчики 7 давления, как показано на фигуре, расположены на соединительных трубопроводах, ведущих к исполнительным механизмам 5, или непосредственно на камере каждого исполнительного механизма 5 и предназначены для измерения давления рабочей жидкости в камерах исполнительных механизмов 5. Следующие исполнительные механизмы 6 расположены известным образом между наклонным транспортером 4 и жаткой 3 и предназначены для поворота жатки 3 вокруг оси, не показанной на фигуре и ориентированной в направлении движения.
На левой и правой стороне жатки 3 под днищем смонтированы выступающие вниз скобы-копиры 8, которые могут поворачиваться вокруг оси, определяемой валом 9. На фигуре днище частично вырезано, чтобы были видны скобы-копиры 8. Датчики 10 высоты с обеих сторон жатки 3 присоединены к валам 9, что позволяет определять расстояние от жатки 3 до грунта на основании положения скоб-копиров 8.
На фигуре 2 представлена блок-схема управляющего устройства 25, которое анализирует сигналы датчиков 7, 10 для управления исполнительными механизмами 5. Правые и левые датчики 10 высоты подсоединены к первому вычислительному устройству 11, которое вычисляет среднее значение на основании возможно различающихся показаний двух датчиков 10 и выводит его в качестве фактической высоты hist среза через первый выход на управляющее устройство 25. Вычислительное устройство 11 может иметь второй выход для сигнала, выведенного для разности показаний датчиков 10 высоты. Этот сигнал используется управляющим устройством 12 (не описываемым подробно в рамках данной заявки) для активизации исполнительных механизмов 6 и тем самым обеспечения поворота жатки 3 вокруг оси, параллельной направлению движения. Такой поворот позволяет свести к минимуму разницу в показаниях датчиков 10 высоты.
Управляющее устройство 25 может представлять собой микропроцессор, в который в форме подпрограмм встроены описываемые в дальнейшем блоки управляющего устройства 25 нижнего уровня; в альтернативном варианте блоки нижнего уровня или, по меньшей мере, некоторые из этих блоков могут быть выполнены в виде дискретных схем.
Вычислительная схема 13 (например, операционный усилитель), формирующая разности, принимает сигнал hist фактической высоты среза от вычислительного устройства 11 и сигнал hsoll заданной высоты среза, который может настраиваться оператором уборочной машины при помощи устройства 14 ввода, расположенного в кабине водителя. Вычислительная схема 13 передает разность Δh=hist-hsoll в первый регулирующий контур 15, который в данном случае выполнен в виде ПИ-регулятора, то есть он генерирует сигнал коррекции высоты с пропорциональной и интегральной составляющей в форме hkorr=aΔh+b∫Δhdt, где a, b представляют собой подходящим образом заданные постоянные (сигнал коррекции высоты может содержать и другие члены, зависящие от Δh иным образом, отличающимся от пропорционального или интегрального).
Следующая вычислительная схема 16 формирует разность между сигналом hkorr коррекции высоты и фактическим давлением pist, переданным одним из датчиков 7 давления исполнительных механизмов 5, и передает ее в качестве сигнала Δр отклонения давления на второй регулирующий контур 17.
Второй регулирующий контур 17, который преобразует сигнал Δp отклонения давления в сигнал pkorr коррекции давления, может быть выполнен в виде чистого или по существу чистого пропорционального регулятора, что позволяет быстро подавать сигнал pkorr коррекции давления после любого изменения фактического давления pist или сигнала hkorr коррекции высоты.
Задающий контур 18 клапана соединен с выходом второго регулирующего контура 17 с целью получения сигнала pkorr коррекции давления. На основании сигнала pkorr коррекции давления задающий контур 18 клапана управляет двумя пропорциональными клапанами 19, 20, из которых один клапан 19 расположен между резервуаром 21 высокого давления и одним из исполнительных механизмов 5, а другой клапан 20 расположен между исполнительным механизмом 5 и безнапорным баком 22 для рабочей жидкости. Датчик 7 давления в данном случае показан на участке трубопровода между исполнительным механизмом 5 и пропорциональным клапаном 20, но он мог бы с тем же успехом располагаться на участке трубопровода между пропорциональным клапаном 19 и исполнительным механизмом 5 или непосредственно на камере исполнительного механизма 5.
Пропорциональные клапаны 19, 20 представляют собой электромагнитные клапаны, степень открытия которых зависит от силы тока, подаваемого на них от задающего контура 18 клапана. Пока сила тока остается ниже нижнего предельного значения, зависящего от конструкции клапанов 19, 20, клапаны 19, 20 остаются закрытыми; в случае превышения предельной силы тока пропускная способность клапанов 19, 20 будет плавно расти вместе с силой тока. Когда pkorr=0, задающий контур 18 удерживает оба клапана 19, 20 в закрытом положении, но при этом нагружает оба клапана предельной силой тока. Таким образом, когда pkorrотличается от нуля, в открываемом клапане 19, 20 должно создаваться магнитное поле, повышение силы подаваемого тока будет замедляться за счет индуктивности электромагнитных клапанов, а степень открытия клапана 19 или 20 сможет следовать за изменением силы подаваемого тока с минимальной задержкой. Так, при pkorr>0 задающий контур 18 открывает клапан 19, в то время как клапан 20 остается закрытым, а возникающий при этом поток рабочей жидкости из резервуара 21 высокого давления обуславливает быстрое повышение давления в исполнительном механизме 5 и, если это повышение сохраняется в течение длительного времени, выдвижение исполнительного механизма 5 и подъем жатки 3. И наоборот, pkorr<0 задающий контур 18 удерживает клапан 19 закрытым и открывает клапан 20, в результате чего давление на исполнительном механизме 5 быстро снижается, исполнительный механизм 5 втягивается, а жатка 3 опускается.
Существует верхнее предельное значение для силы тока, подаваемого на пропорциональный клапан 19, 20, при котором клапан 19 или 20 полностью открыт, то есть дальнейшее повышение силы тока не приведет к увеличению потока через клапан. Соответственно, существует верхнее положительное значение pkorr, max и нижнее отрицательное значение pkorr, min для pkorr, переход через которые не влияет на пропускную способность клапана 19 или 20. Если отклонение между заданной и фактической высотой hsoll, hist среза сохраняется в течение длительного времени, то интегральная составляющая сигнала hkorr коррекции высоты первого регулирующего контура 15 может оказаться настолько большой, что pkorr выйдет за границы диапазона (pkorr, min, pkorr, max) этих предельных значений. Если впоследствии отклонение Δh высоты среза изменит свой знак, может пройти некоторое время до того, как интегральная составляющая снизится настолько, что pkorr снова вернется в пределы этого диапазона. В течение этого времени клапан 19 или 20 будет оставаться в максимально открытом положении. Обусловленные этой задержкой скачки жатки 3 можно снизить за счет того, что коэффициент b эквивалентности интегрального члена будет принят не в качестве постоянной, как указано выше, а в качестве функции сигнала pkorr, возвращаемого на вход 23 обратной связи первого регулирующего контура 15: в простейшем случае b имеет постоянное, отличное от нуля значение, пока pkorr остается в пределах диапазона (pkorr, min, pkorr, max), и значение 0, если pkorr выходит за пределы этого диапазона. Таким образом, изменение интегрального члена подавляется при достижении сигналом pkorr любой из границ этого диапазона. Так, смена знака Δh немедленно влияет на изменение pkorr и тем самым степени открытия клапанов 19, 20.
Устройство 14 ввода, под которым может пониматься, например, переключатель, ползунковый регулятор и т.п., позволяет оператору быстро переключать заданную высоту среза. Чтобы жатку 3 можно было опустить и снять с уборочной машины 1, необходимо установить заданную высоту среза на 0, то есть жатка 3 должна соприкоснуться с грунтом. Когда оператор с этой целью устанавливает hsoll на устройстве 14 ввода на 0, а жатка 3 удерживается над почвой, то отклонение Δh высот резко изменяется на сильно отличающееся от нуля значение, которое через пропорциональную составляющую на выходе первого регулирующего контура 15 и, по существу, работающий по чисто пропорциональной схеме второй регулирующий контур 17 быстро воздействует на сигнал pkorr коррекции давления и сильно изменяет его в отрицательную сторону. В результате задающий контур 18 широко открывает клапан 20 и жатка 3 быстро опускается. Δh будет снова равен нулю только тогда, когда жатка 3 достигнет земли. Для предотвращения неконтролируемого столкновения жатки 3 с почвой предусмотрен предпочтительный вариант исполнения, в котором между устройством 14 ввода и вычислительной схемой 13 установлен фильтр 24 низких частот. Независимо от скорости переключения заданной высоты на устройстве 14 ввода фильтр 24 низких частот обеспечивает плавное приближение заданного значения на входе вычислительной схемы 13 к заданному значению, установленному оператором. В результате Δh может принимать очень малые значения или даже изменять свой знак до того, как жатка 3 войдет в соприкосновение с почвой. Вследствие этого жатка 3 будет медленнее приближаться к почве и жесткий контакт с почвой будет исключен.
В представленном варианте исполнения вычислительная схема 16 имеет также вход для сигнала psoll заданного давления, которое устанавливается оператором на втором устройстве 26 ввода.
Пока жатка 3 не соприкасается с почвой, влияние заданного давления psoll, установленного на втором устройстве 26 ввода, на функционирование управляющего устройства 25 минимально. Когда высота hist жатки 3 ниже заданного значения hsoll, сигнал hkorr коррекции высоты плавно увеличивается за счет интегральной составляющей. В результате pkorr также увеличивается до тех пор, пока давление в исполнительном механизме 5 остается достаточным для того, чтобы поднимать жатку 3. Время, необходимое для этого при запуске управляющего устройства 25, можно сократить за счет того, что на входе вычислительной схемы будет введено заданное значение psoll, приблизительно соответствующее давлению, необходимому для удержания жатки 3 в равновесии. Тем не менее, psoll не влияет на установленную в итоге высоту жатки 3, а скорость реакции управляющего устройства во время работы не зависит от psoll. Наконец, когда заданная высота hsollсреза установлена равной нулю, а жатка 3 соприкоснулась с почвой, при помощи psoll можно регулировать давление, оказываемое жаткой 3 на почву. Одновременно в этом рабочем состоянии можно переключать первый регулирующий контур из пропорционально-интегрального режима в пропорциональный режим.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
1 уборочная машина
2 кузов
3 жатка
4 наклонный транспортер
5 исполнительный механизм
6 исполнительный механизм
7 датчик давления
8 скоба-копир
9 вал
10 датчик высоты
11 вычислительное устройство
12 управляющее устройство
13 дифференциальная схема (вычислительная схема)
14 устройство ввода
15 первый регулирующий контур
16 вычислительная схема
17 второй регулирующий контур
18 задающий контур клапана
19 пропорциональный клапан
20 пропорциональный клапан
21 резервуар высокого давления
22 бак
23 вход обратной связи
24 фильтр низких частот
25 управляющее устройство
26 устройство ввода
Реферат
Группа изобретений относится к сельскому хозяйству. Самоходная уборочная машина содержит жатку, по меньшей мере один гидравлический исполнительный механизм, по меньшей мере один датчик высоты, по меньшей мере один датчик давления и управляющее устройство. Гидравлический исполнительный механизм предназначен для регулировки высоты среза жатки. Датчик высоты измеряет высоту среза. Датчик давления измеряет давление рабочей жидкости на исполнительном механизме. Управляющее устройство активирует исполнительный механизм на основании показаний датчика высоты и датчика давления. Управляющее устройство разделено на первый регулирующий контур и второй регулирующий контур. Первый регулирующий контур генерирует сигнал коррекции высоты среза. Второй регулирующий контур регулирует давление на исполнительном механизме. Группа изобретений позволяет срезать и собирать убираемую культуру на постоянном расстоянии от земли даже при неровном поле. 2 н. и 5 з.п. ф-лы, 2 ил.
Комментарии