Система привода сельскохозяйственной машины - RU2730031C2
Код документа: RU2730031C2
Чертежи
Описание
Область техники, к которой относится изобретение
Настоящее изобретение в общем относится к системам привода машины. Более конкретно, но не ограниваясь, настоящее изобретение относится к системе привода для сельскохозяйственной уборочной машины или комбайна.
УРОВЕНЬ ТЕХНИКИ
Существует множество различных типов машин, которые имеют систему привода для приведения в действие множества подсистем или других элементов. В контексте сельского хозяйства, например, уборочные машины, сеялки и посадочные машины, почвообрабатывающее оборудование и опрыскиватели могут иметь одну или более систем привода для управления общим движением машины, а также и элементами на машине.
В иллюстративной сельскохозяйственной уборочной машине или комбайне множество орудий может приводиться в действие системой привода, которой управляют с помощью одной или более систем управления на машине. Комбайн может использоваться для уборки любой из множества сельскохозяйственных культур, такой как пшеница, овес, кукуруза, соя, подсолнечник и канола. Машина содержит подсистемы или другие элементы для перемещения машины по полю, а также для жатвы, молотьбы и провеивания сельскохозяйственных культур. В зависимости от типа убираемой сельскохозяйственной культуры могут использоваться различные типы насадок орудий, или жатки.
Обсуждение выше предоставлено исключительно для общей базовой информации и не предназначено для использования в качестве помощи при определении объема правовых притязаний заявленного предмета изобретения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Описана сельскохозяйственная уборочная машина. В одном примере машина содержит жатку, систему подачи, выполненную с возможностью подачи материала из жатки через секцию обмолота по транспортировочному пути, при этом система подачи содержит транспортировочный механизм, который транспортирует материал из жатки во вращающийся механизм подачи, и систему привода, выполненную с возможностью приведения механизма подачи в действие с вращением во время первого состояния для транспортировки материала по транспортировочному пути, и с возможностью обратного вращения механизма подачи во время второго состояния.
В одном примере система привода содержит первый и второй механизмы привода, и соединительный механизм, выполненный с возможностью выборочного соединения одного из первого или второго механизмов привода с механизмом вывода, таким как, но без ограничения, вращающийся механизм подачи в сельскохозяйственной уборочной машине.
Данное краткое изложение предоставлено для введения в упрощенном виде выбора концепций, которые дополнительно описаны ниже в подробном описании. Данное краткое изложение не предназначено для идентификации ключевых признаков или существенных признаков заявленного предмета изобретения, не предназначено оно и для использования в качестве помощи при определении объема правовых притязаний заявленного предмета изобретения. Заявленный предмет изобретения не ограничен вариантами осуществления, которые решают какие-либо или все недостатки, отмеченные в уровне техники.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
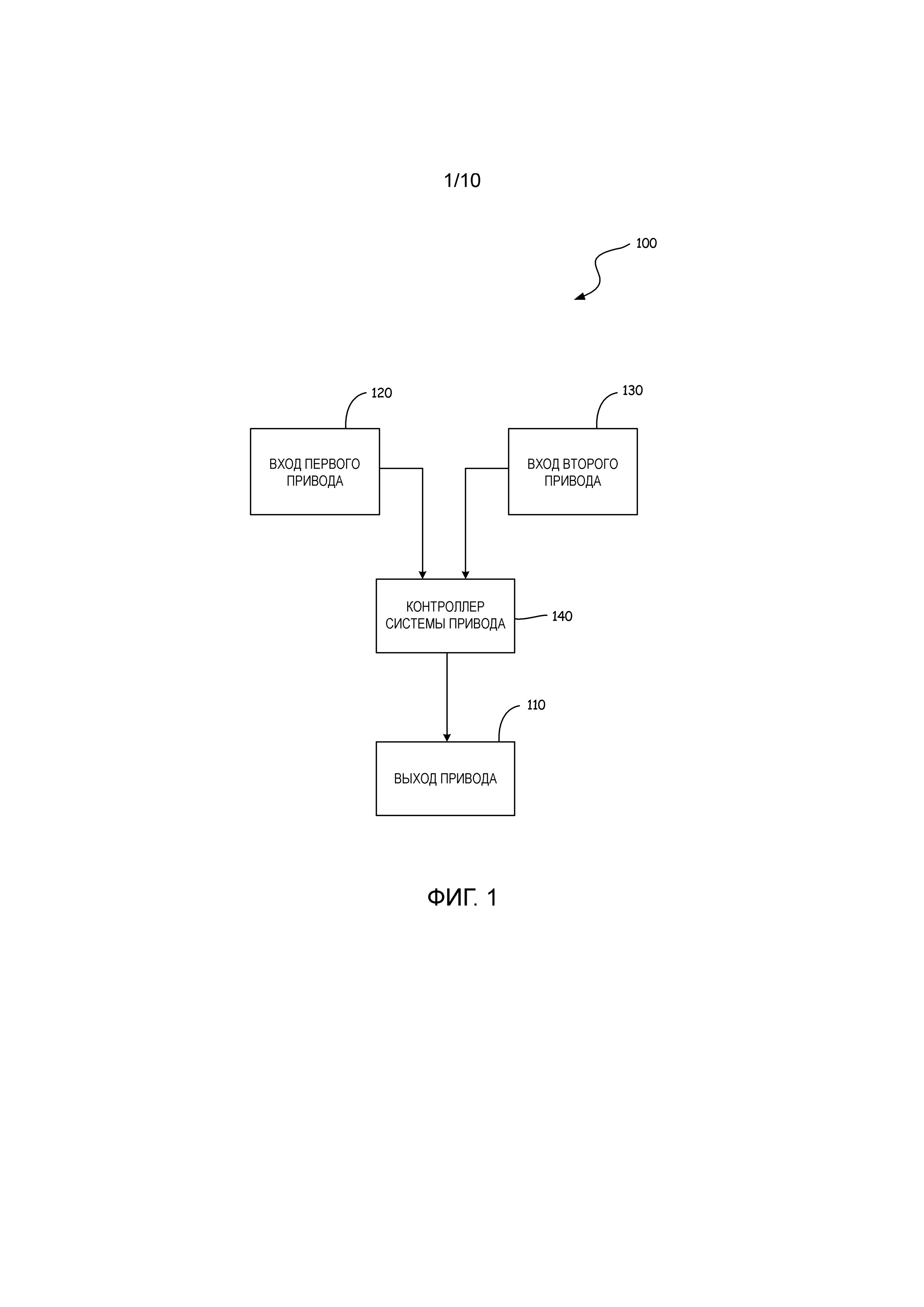
ФИГ.1 представляет собой упрощенное схематичное изображение системы привода, в одном примере.
ФИГ.2 представляет собой частичную схематичную иллюстрацию сельскохозяйственной уборочной машины или комбайна, в одном примере.
ФИГ.3 представляет собой упрощенную блок-схему, показывающую некоторые элементы комбайна, в одном примере.
ФИГ.4A и 4B иллюстрируют один пример подсистемы подачи, которая приводится в действие системой привода.
ФИГ.5A, 5B и 5C иллюстрируют один пример трансмиссии для приведения в движение подсистемы машины.
ФИГ.6 иллюстрирует иллюстративный способ приведения в действие сельскохозяйственной машины.
ФИГ.7 представляет собой схематичное изображение одного примера вычислительной среды.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение в общем относится к системам привода машины и ее управлению. Существует множество различных типов машин, в которых используются системы привода для приведения в действие множества подсистем или других элементов. Некоторые примеры включают, но без ограничения, механические транспортные средства, летательные аппараты, морские транспортные средства, строительное оборудование, сельскохозяйственное оборудование и тому подобное. Системы привода действуют, чтобы придавать движение (например, линейное движение, вращательное движение и т.д.) в подсистемах или других элементах. В контексте сельскохозяйственной уборочной машины или комбайна для подачи через машину сельскохозяйственного материала (например, убранной сельскохозяйственной культуры) в подсистеме подачи используется транспортирующий узел, вращающийся механизм подачи (например, ускоритель подачи и/или молотильный цилиндр или барабан).
Как подробно дополнительно обсуждается ниже, в процессе нормальной работы комбайна элементы системы подачи приводятся в действие в первом для транспортировки материала через комбайн или нормальном направлении. Однако, в некоторых ситуациях элемент (элементы) системы подачи могут засоряться, заедать или застревать иным образом, например, в результате увеличения потока материала за пределы рабочего порогового значения или ограничения. Часто, это требует от оператора остановки машины и исправления вручную засоренных подающих элементов, например, посредством удаления корпуса системы подачи для доступа к подающим элементам.
Перед более подробным описанием сельскохозяйственной уборочной машины сперва будет описан один пример системы 100 привода машины в отношении ФИГ.1. Необходимо отметить, что несмотря на то, что примеры в данном документе описаны в контексте комбайна, иллюстративные системы привода и связанные с ними элементы и способы также могут использоваться в других типах машин.
ФИГ.1 представляет собой упрощенное схематичное изображение системы 100 привода, которая может использоваться в любом из множества транспортных средств или других машин. Один пример представляет собой комбайн. Система 100 привода выполнена с возможностью создания выходной мощности 110 привода, которая придает движение (например, линейное движение, вращательное движение и т.д.) в подсистемах или другом элементе машины. Система 100 привода содержит множество входов привода, иллюстративно вход 120 первого привода и вход 130 второго привода. В одном примере входы 120 и 130 первого и второго приводов содержат входы от одного и того же механизма привода (например, два приводных ремня или цепи от одного и того же двигателя). В еще одном примере входы 120 и 130 содержат входы от различных, независимо действующих механизмов привода. Например, механизмы могут содержать отдельные двигатели. В одном конкретном примере первый механизм привода содержит двигатель внутреннего сгорания, а второй механизм привода содержит электрический двигатель.
Контроллер 140 системы привода выполнен с возможностью управления выходной мощностью 110 привода на основании управляющего сигнала, который может генерироваться на основании входных данных оператора, автоматически или полуавтоматически. В одном примере управляющий сигнал используется для выборочного соединения одного из входов 120 и 130 привода с выходом 110 привода. Как подробно дополнительно обсуждается ниже, в иллюстративном варианте осуществления комбайна, выход 110 привода представляет собой вращающийся механизм подачи (например, ускоритель подачи, молотильный барабан и т.д.), а для приведения в действие механизма подачи контроллер 140 системы привода выборочно соединяет один из входов 120 или 130.
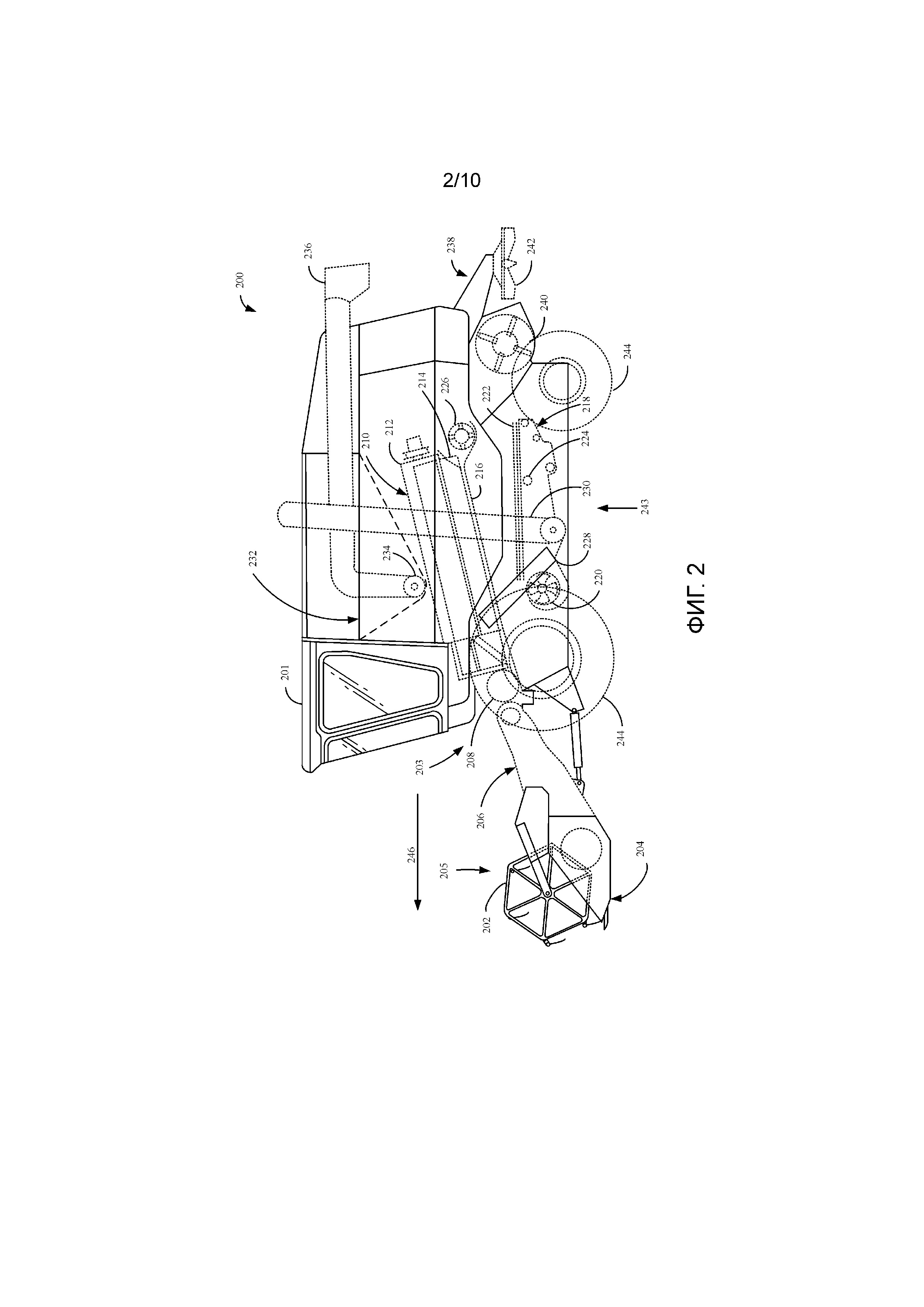
ФИГ.2 представляет собой частичную схематичную иллюстрацию сельскохозяйственной уборочной машины или комбайна 200, которая в одном примере содержит систему привода. На фиг.2 можно видеть, что комбайн 200 иллюстративно содержит отделение 201 оператора и подсистему на переднем конце, содержащую на переднем конце комплект оборудования, который может включать жатку 202 и режущий инструмент, в общем показанный под номером 204. Жатку 202 и режущий инструмент 204 конфигурируют на основании типа сельскохозяйственной культуры, подлежащей уборке.
Комбайн 200 также содержит подсистему 203 управления или подачи материала, выполненную с возможностью транспортировки или подачи срезанной сельскохозяйственной культуры по меньшей мере в часть комбайна 200 и через нее. Подсистема 203 подачи содержит транспортирующий узел, такой как приемная камера молотилки 206, который транспортирует сельскохозяйственную культуру из оборудования переднего конца в комбайн 200. Подсистема 203 подачи также содержит вращающийся механизм подачи, который принимает сельскохозяйственную культуру из приемной камеры молотилки 206. В проиллюстрированном примере вращающийся механизм подачи содержит ускоритель 208 подачи, выполненный с возможностью ускорения подачи сельскохозяйственной культуры в направлении или на последующую стадию обмолота (например, во вращающийся молотильный барабан или цилиндр). Однако, следует отметить, что в другом примере, в котором не используется ускоритель подачи, для приема сельскохозяйственной культуры из приемной камеры молотилки 206 стадия обмолота может быть исключена. В одном примере ось молотильного барабана ориентирована перпендикулярно потоку сельскохозяйственной культуры из приемной камеры молотилки 206. В еще одном примере ось молотильного барабана по существу выровнена с потоком сельскохозяйственной культуры.
В примере фиг.2 молотилка 210 иллюстративно содержит ротор 212 молотилки и группу секций 214 подбарабанья. Кроме того, комбайн 200 может содержать сепаратор 216, который содержит ротор сепаратора. Комбайн 200 может содержать подсистему очистки (или зерноочистку) 218, которая сама может содержать очистной вентилятор 220, мякинное решето 222 и сито 224. Подсистема 203 управления или подачи материала может содержать (в дополнение к приемной камере молотилки 206 и ускорителю 208 подачи) выгружающий битер 226, подъемник 228 недомолоченных колосьев, подъемник 230 чистого зерна (который перемещает чистое зерно в резервуар 232 для чистого зерна), а также разгрузочный шнек 234 и выгрузную трубу 236. Комбайн 200 может дополнительно содержать подсистему 238 остатков, которая может содержать измельчитель 240 и разбрасыватель 242. Комбайн 200 также может иметь подсистему 243 движения, которая содержит входящие в соприкосновение с землей колеса 244 или гусеницы и т.д., которые приводятся в действие с помощью силовой передачи. Следует отметить, что комбайн 200 также может иметь более чем одну из любых из подсистемы, упоминавшихся выше (например, левую и правую зерноочистки, сепараторы и т.д.).
Во время работы и в качестве беглого обзора, комбайн 200 иллюстративно передвигается по полю в направлении, обозначенном стрелкой 246. По мере передвижения жатка 202 зацепляет сельскохозяйственную культуру, подлежащую уборке, и собирает ее в направлении режущего инструмента 204. После ее срезания, она перемещается транспортером в приемной камере молотилки 206 в направлении ускорителя 208 подачи, который ускоряет сельскохозяйственную культуру в молотилку 210. Сельскохозяйственная культура обмолачивается ротором 212, вращающим сельскохозяйственную культуру о подбарабанье 214. Обмолоченная сельскохозяйственная культура перемещается ротором сепаратора в сепараторе 216, где некоторая часть остатков перемещается выгружающим битером 226 в направлении подсистемы 238 остатков. Они могут измельчаться измельчителем 240 остатков и распределяться по полю с помощью разбрасывателя 242. В других вариантах осуществления вместо измельчения и распределения остатки просто сбрасываются в валок.
Зерно падает в зерноочистку (или подсистему очистки) 218. Мякинное решето 222 отделяет некоторую часть более крупного материала от зерна, а сито 224 отделяет некоторую часть более мелкого материала от чистого зерна. Чистое зерно падает в шнек в подъемнике 230 чистого зерна, который перемещает чистое зерно вверх и помещает его в резервуар 232 для чистого зерна. Остатки могут удаляться из зерноочистки 218 воздушным потоком, генерируемым очистным вентилятором 220. Эти остатки также могут перемещаться в комбайне 200 назад в направлении подсистемы 238 остатков.
Недомолоченные колосья могут перемещаться подъемником 228 недомолоченных колосьев назад в молотилку 210, где они могут быть обмолочены повторно. В качестве альтернативы, недомолоченные колосья также могут проходить в отдельный механизм повторного обмолота (также используя подъемник недомолоченных колосьев или другой механизм транспортировки), где они также могут быть повторно обмолочены.
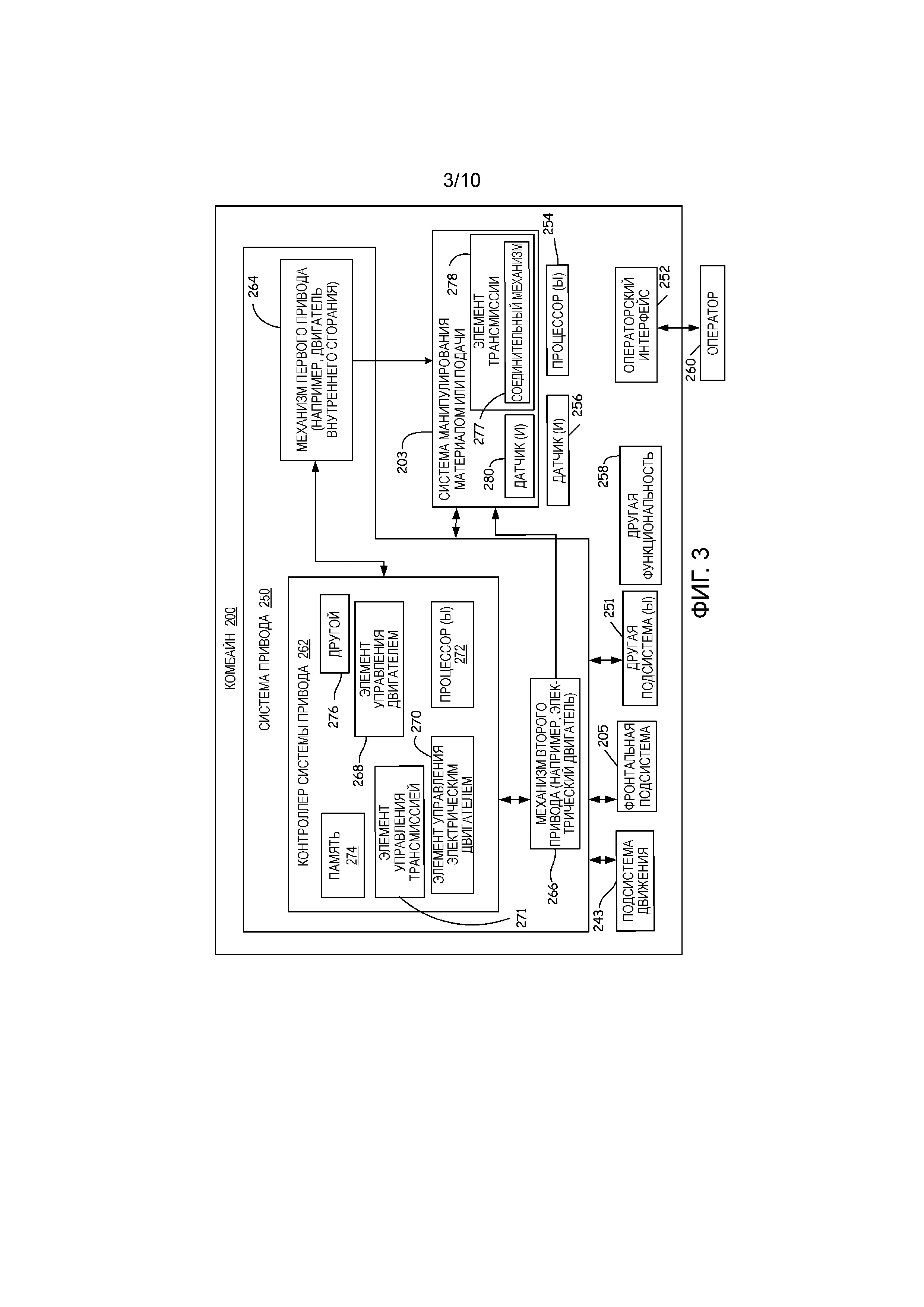
ФИГ.3 представляет собой упрощенную блок-схему, показывающую некоторые элементы комбайна 200, в одном примере. Комбайн 200 имеет систему 250 привода, выполненную с возможностью приведения в действие одной или более подсистем, включая, но без ограничения, подсистему 203 подачи, фронтальную подсистему 205, подсистему 243 движения и/или другие подсистемы 251. Комбайн 200 также содержит операторский интерфейс 252, один или более процессоров 254, один или более датчиков 256 и может содержать большое множество других функций 258.
В одном примере операторский интерфейс 252 содержит механизмы ввода оператора и механизмы вывода. Механизмами вывода могут быть механизмы, которые могут передавать информацию оператору 260, такие как устройства визуального отображения, аудио устройства, тактильные устройства обратной связи и т.д. Механизмы ввода оператора могут содержать большое множество различных механизмов, которые могут приводиться в действие оператором 260 для управления и манипулирования различными системами и подсистемами комбайна 200. Механизмы ввода оператора, например, могут содержать рычаги, рулевые колеса, педали, джойстики, клавиши, клавиатуры, механизмы ввода пользователя на дисплеях пользовательского интерфейса, среди большого множества других механизмов ввода.
Система 250 привода содержит контроллер 262 системы привода, выполненный с возможностью управления по меньшей мере одним механизмом привода, который приводит в действие подсистему (подсистемы). Например, как показано на фиг.3, контроллер 262 выполнен с возможностью управления работой одного или более элементов в подсистеме 203 подачи, такой как вращающийся механизм подачи (например, ускоритель 208 подачи и/или молотильный барабан молотилки 210). В одном примере система 250 привода работает с вращением механизма подачи в первом направлении в процессе нормальной работы комбайна 200, описанного выше. Как также упоминалось выше, в некоторых ситуациях механизм подачи может засоряться. Как упоминается более подробно ниже, система 250 привода также выполнена с возможностью приведения в действие вращающегося механизма подачи во втором, противоположном направлении для исправления состояния затора.
В одном примере для изменения направления механизма подачи на обратное, система 250 привода может использовать трансмиссию, которая соединяет механизм привода, такой как двигатель внутреннего сгорания, с механизмом подачи. Для изменения направления вращения трансмиссия содержит реверсивные шестерни.
В проиллюстрированном примере система 250 привода содержит первый механизм 264 привода и второй механизм 266 привода. Механизм 264 привода иллюстративно представляет собой двигатель внутреннего сгорания (или двигатель другого типа), а механизм 266 привода представляет собой электрический двигатель (или двигатель другого типа). Первый элемент 268 управления (например, двигателем) выполнен с возможностью управления работой (например, скоростью и/или направлением) механизма 264 привода, а второй элемент 270 управления (например, электрическим двигателем) выполнен с возможностью управления работой (например, скоростью и/или направлением) механизма 266 привода. Контроллер 262 также содержит элемент 271 управления трансмиссией, выполненный с возможностью управления элементом 277 трансмиссии. В одном примере элемент 271 управления трансмиссией содержат элемент (элементы) для приведения в действие элемента 277 трансмиссии гидравлически, пневматически и/или электронно. Контроллер 262 также может содержать один или более процессор (процессоров) 272, хранилище 274 данных, а также может содержать другие элементы 276.
элемент 277 трансмиссии выполнен с возможностью передачи мощности из системы 250 привода в подсистему 203 подачи. Как проиллюстрировано на фиг.3, элемент 277 трансмиссии содержит соединительный механизм 278, выполненный с возможностью выборочного соединения одного из механизмов 264 и 266 привода с подсистемой 203. Примеры соединительного механизма 278 обсуждаются более подробно ниже. Однако, вкратце соединительный механизм 278 может содержать любой подходящий механизм (механизмы), включая, но без ограничения, элемент (элементы) с механическим сопряжением, который функционально соединяет выбранный механизм 264 или 266 привода с подсистемой 203. В то же время элемент 277 трансмиссии проиллюстрирован в виде части подсистемы 203, причем следует отметить, что элемент 277 трансмиссии может быть задействован за пределами подсистемы 203. Кроме того, элемент 277 трансмиссии может использоваться также для выборочного соединения механизмов привода с другими подсистемами.
В одном примере контроллер 262 работает, управляя способом, в котором подсистема 203 приводится в действие системой 250 привода, например, на основании рабочего состояния подсистемы 203 (например, если засорен механизм подачи и т.д.). Например, контроллер 262 работает с выборочным соединением (т.е. Используя соединительный механизм 278) первого механизма 264 привода с подсистемой 203 для приведения в действие вращающегося механизма подачи (например, ускорителя подачи и/или молотильного барабана) в первом направлении, транспортируя посредством этого сельскохозяйственный материал назад через комбайн 200 в процессе нормальной работы. Контроллер 262 работает с выборочным соединением (используя соединительный механизм 278) второго механизма 266 привода с подсистемой 203 для приведения в действие вращающегося механизма подачи во втором, противоположном направлении во время случая засора. Таким образом, второй механизм 266 (например, электрический двигатель) используется для устранения определенных недостатков (например, засора и т.д.) в подсистеме 203.
Для определения недостатков (например, засоренного ускорителя подачи и/или молотильного барабана) подсистема 203 может содержать один или более датчиков 280. Сигнал от датчика (датчиков) 280 предоставляется в контроллер 262, и используя процессор (процессоры) 272 контроллер 262 выборочно управляет соединительным механизмом 278 и механизмом 266 привода. Сигнал может быть показателем, например, скорости вращения и/или крутящего момента, прикладываемого к механизму подачи, скорости потока через подсистему 203. Показание определенных недостатков может быть предоставлено оператору 260 через интерфейс 252, при этом оператор 260 обеспечивает ввод в контроллер 262 для запуска процесса исправления. В качестве альтернативы или в дополнение, процесс исправления может быть инициирован контроллером 262 автоматически в ответ на сигналы от датчика (датчиков) 280.
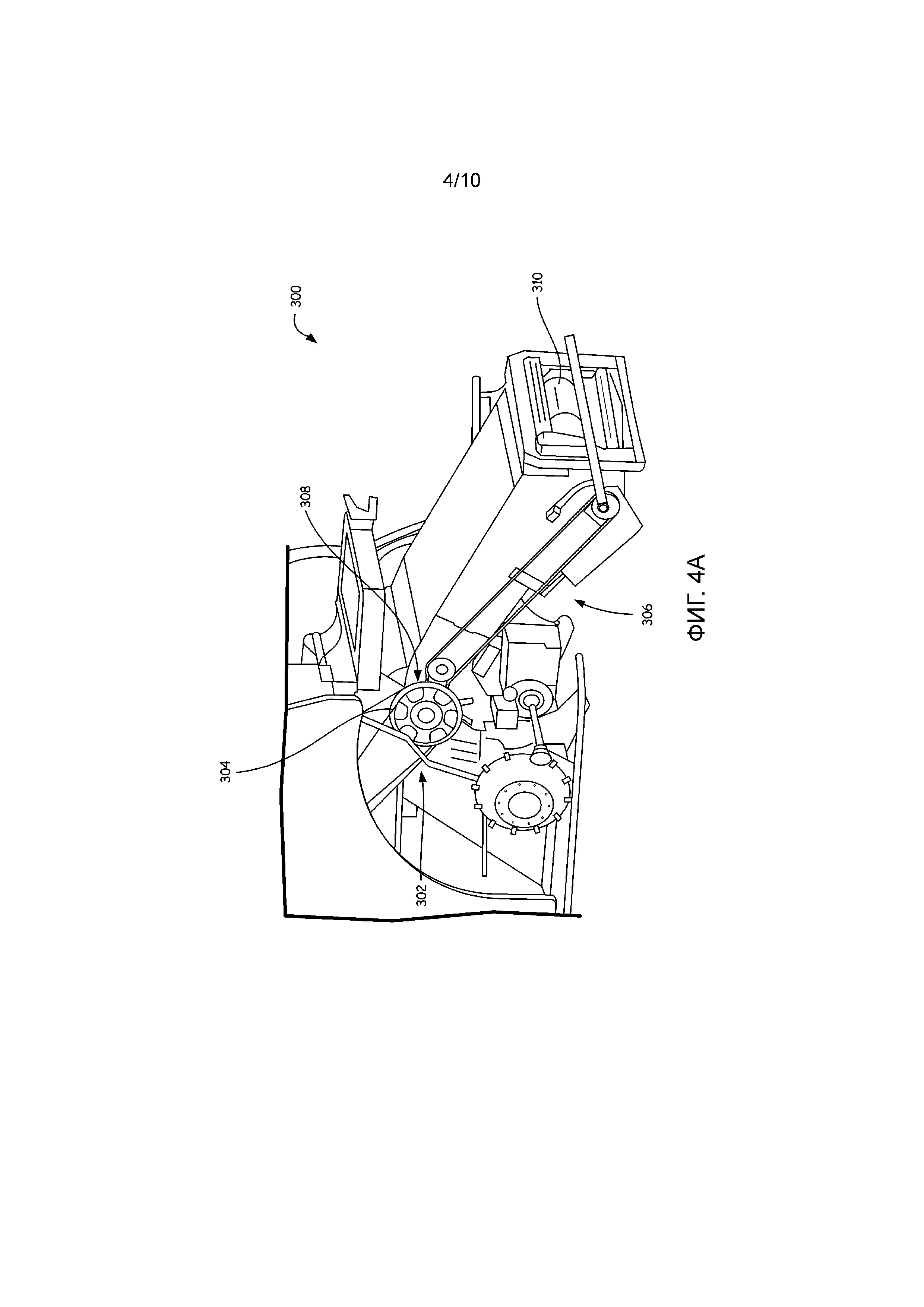
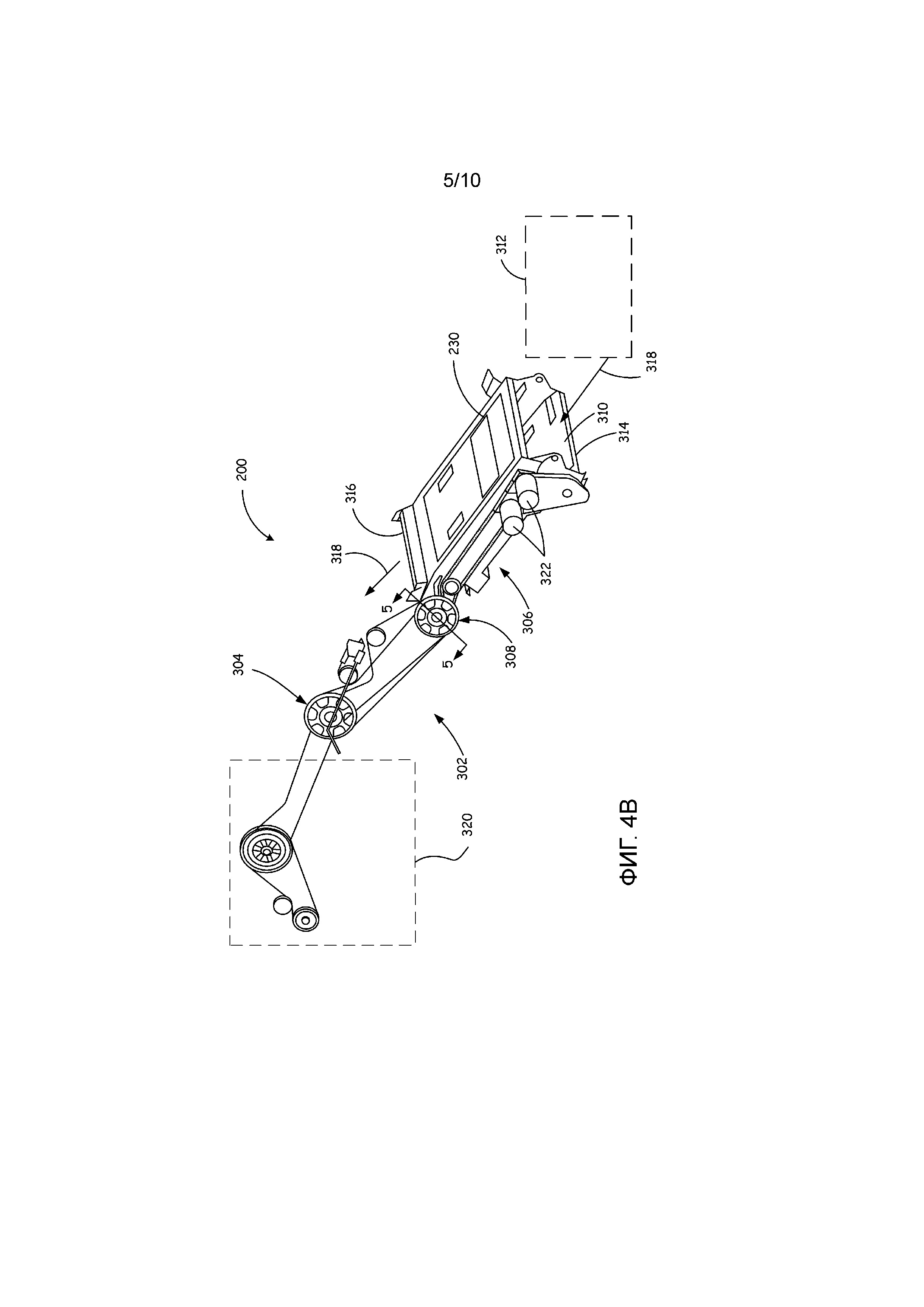
ФИГ.4A и 4B (упоминаемые совместно, как ФИГ.4) иллюстрируют один пример подсистемы 300 подачи, которая приводится в действие системой 302 привода. На каждой из ФИГ.4A и 4B для иллюстративных целей некоторые элементы подсистемы 300 подачи были опущены.
Одним примером системы 302 привода является система 250 привода, проиллюстрированная на фиг.3. Система 302 привода содержит первый механизм 304 привода и второй механизм 306 привода, каждый из которых выполнен с возможностью приведения в действие подсистемы 300 подачи, используя элемент 308 трансмиссии (например, соединительный механизм 278 на фиг.3). В проиллюстрированном примере элемент 308 трансмиссии выполнен с возможностью выборочного соединения одного из механизмов 304 и 306 привода для приведения в действие вращающегося подающего элемента (не показано на фиг.4) подсистемы 300, такого как ускоритель подачи и/или молотильный барабан.
Подсистема 300 подачи содержит механизм 310 транспортировки сельскохозяйственного материала, выполненный с возможностью транспортировки сжатой сельскохозяйственной культуры из жатки (в общем представленный в виде квадрата 312) на первом конце 314 механизма 310 транспортировки во вращающийся подающий элемент на втором конце 316. Соответственно, вращающийся подающий элемент расположен в технологическом процессе после механизма 310 транспортировки сельскохозяйственного материала, который транспортируется по пути сельскохозяйственного материала, в общем представленного стрелкой 318. В одном примере механизм 310 содержит приемную камеру молотилки, имеющую транспортерную ленту или транспортировочный механизм другого типа.
В одном примере первый механизм 304 привода содержит основной механизм привода для машины, такой как двигатель внутреннего сгорания (в общем представленный на фиг.4B пунктирным квадратом 320). Второй механизм 306 привода содержит отдельный двигатель от механизма 304. Например, механизм 306 содержит один или более электрических двигателей 322.
Каждый из механизмов 304 и 306 привода содержит один или более соединительных элементов, таких как шкив (шкивы), звездочка (звездочки), ремень (ремни), цепь (цепи) и/или другой элемент (элементы). В проиллюстрированном примере механизм 304 содержит систему ремней и шкивов, которая соединяет двигатель 320 с элементом 308 трансмиссии, а механизм 306 содержит систему цепей и звездочек, которая соединяет двигатель (двигатели) 322 с трансмиссией 308.
Элемент 308 трансмиссии содержит любой подходящий механизм для выборочной передачи мощности от механизмов 304 и 306 привода в механизм подачи подсистемы 300 или другой механизм. Например, трансмиссия 308 может содержать коробку передач или другой элемент зубчатой передачи.
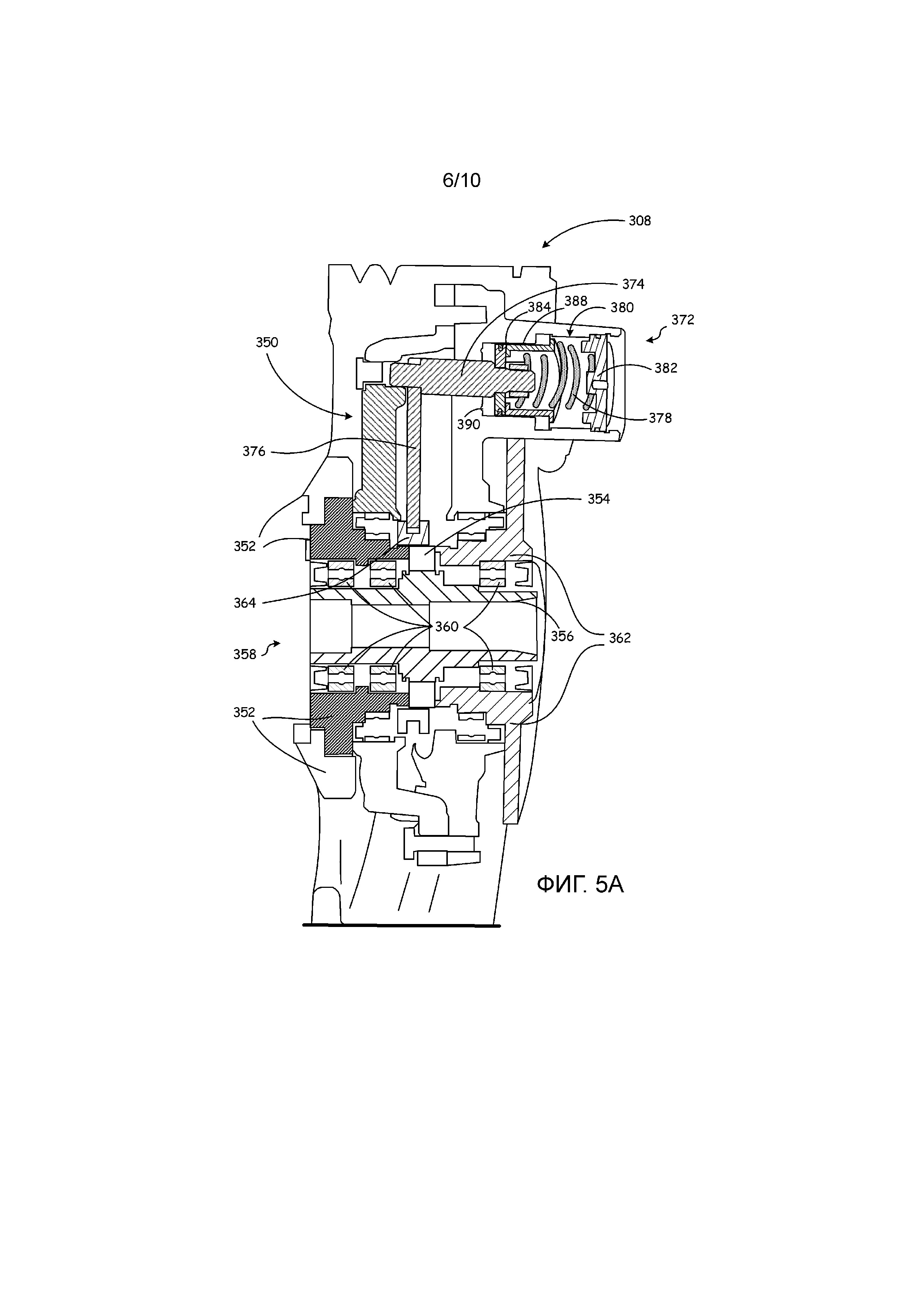
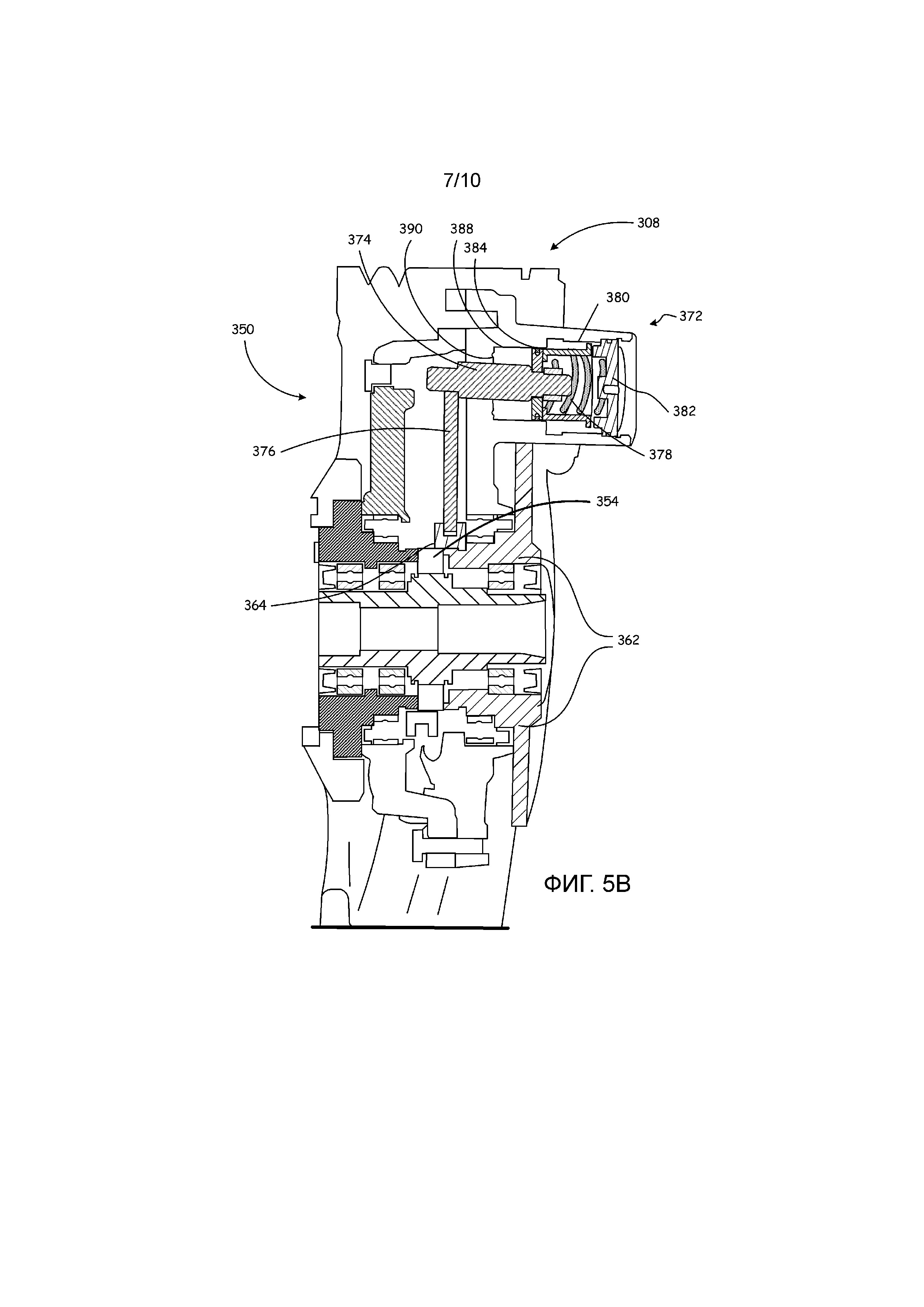
ФИГУРЫ 5A, 5B и 5C (упоминаемые совместно, как ФИГ.5) иллюстрируют один пример элемента 308 трансмиссии. ФИГУРЫ 5A, 5B и 5C представляют собой изображения в поперечном разрезе, сделанном по линии 5-5, показанной на фиг.4B.
Элемент 308 трансмиссии содержит подвижно соединяющий механизм 350, который выполнен с возможностью перемещения между первым и вторым положениями. В первом положении (проиллюстрированном на фиг.5A) соединительный механизм 350 функционально соединяет первый механизм привода с вращающимся механизмом подачи, а во втором положении (проиллюстрированном на фиг.5B) соединительный механизм 350 функционально соединяет второй механизм привода с вращающимся механизмом подачи.
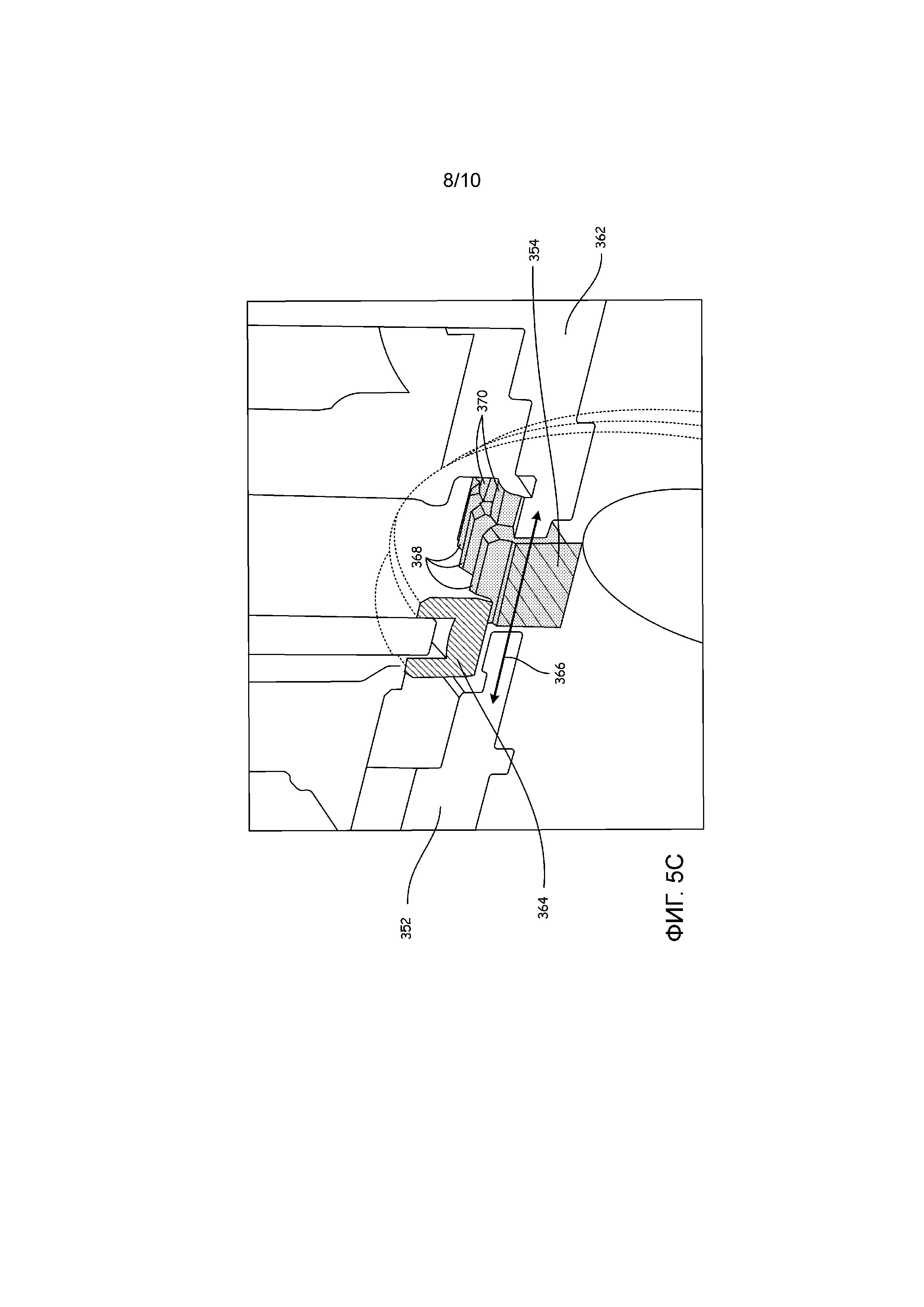
Как показано на фиг.5A, в первом положении соединительный механизм 350 соединяет вращающееся соединительное средство (иллюстративно элемент-шкив) 352 с соединительным валом 354. Соединительный вал 354 неподвижно соединен и вращается с валом 356 механизма подачи. Вал 356 расположен внутри канала 358. При отсоединении вал 356 вращается относительно элемента шкива 352 с использованием одного или более подшипников 360. Как показано на фиг.5B, во втором положении соединительный механизм 350 соединяет вращающееся соединительное средство (иллюстративно элемент-звездочку) 362 с соединительным валом 354. При отсоединении вал 356 вращается относительно элемента-звездочки 362 с использованием одного или более подшипников 360.
В проиллюстрированном примере соединительный механизм 350 содержит кольцо 364 включения, которое выполнен с возможностью перемещения в боковом направлении между первым и вторым положениями. Это проиллюстрировано на фиг.5C двойной стрелкой 366. В первом положении (показанном на фиг.5C) кольцо 364 включения зацепляет и функционально соединяет вместе группу зубцов 368 на соединительном валу 354 и группу зубцов (не показана на фиг.5C) на элементе-шкиве 352. Во втором положении (т.е. кольцо 364 включения перемещается вправо на фиг.5C) кольцо 364 включения зацепляет и функционально соединяет вместе группу зубцов 368 и группу зубцов 370 на элементе 362.
Снова со ссылкой на ФИГУРЫ 5A и 5B исполнительный механизм 372 выполнен с возможностью приведения в движение кольца 364 включения между первым и вторым положениями. Исполнительный механизм 372 может приводиться в действие контроллером (например, контроллером 262) пневматически, гидравлически и/или электронно. В одном примере для приведения в действие исполнительного механизма 372 могут использоваться электрический переключатель, электромагнит и/или другие электронные элементы. В одном примере для приведения в действие исполнительного механизма 372 может использоваться кабель. В проиллюстрированном примере для гидравлического приведения в действие с исполнительным механизмом 372 соединена гидравлическая линия.
Как показано, исполнительный механизм 372 содержит поршень или соединительный шток 374 и поперечный соединительный корпус 376, который соединяет шток 374 с кольцом 364 включения. В проиллюстрированном примере смещающий механизм (в качестве иллюстрации пружина 378 или другой смещающий механизм) смещает исполнительный механизм в первое положение. При сдавливании пружина 378 помещается в отделении 380 между колпаком 382 и элементом-плунжером 384, имеющим уплотняющее зацепление 386 с поверхностью 388 боковой стенки камеры или полости, в которой расположен исполнительный механизм 372. Для приведения кольца 364 включения во второе положение в полость на конце 390 нагнетают гидравлическую жидкость (используя порт гидросистемы, не показанный на фиг.5), которая прикладывает усилие к элементу-плунжеру 384, который перемещает шток 374 вправо, как показано на фиг.5B.
Далее в контексте системы подачи комбайна будет описана иллюстративная работа исполнительного механизма 372. Первый механизм привода комбайна (например, двигатель внутреннего сгорания) соединен с ведущим валом 356 через соединительный механизм 350. При выявлении состояния затора элемент-шкив 352 останавливается, например, за счет остановки двигателя или отсоединения системы шкива от двигателя с использованием муфты. Затем, исполнительный механизм 372 приводится в действие под управлением оператора, или иным образом (например, автоматически контроллером 262), для передвижения кольца 364 включения во второе положение. Затем, второй механизм привода (например, электрический двигатель) задействуют для приведения в действие системы подачи (например, реверсирования или колебания ускорителя подачи и/или молотильного цилиндра).
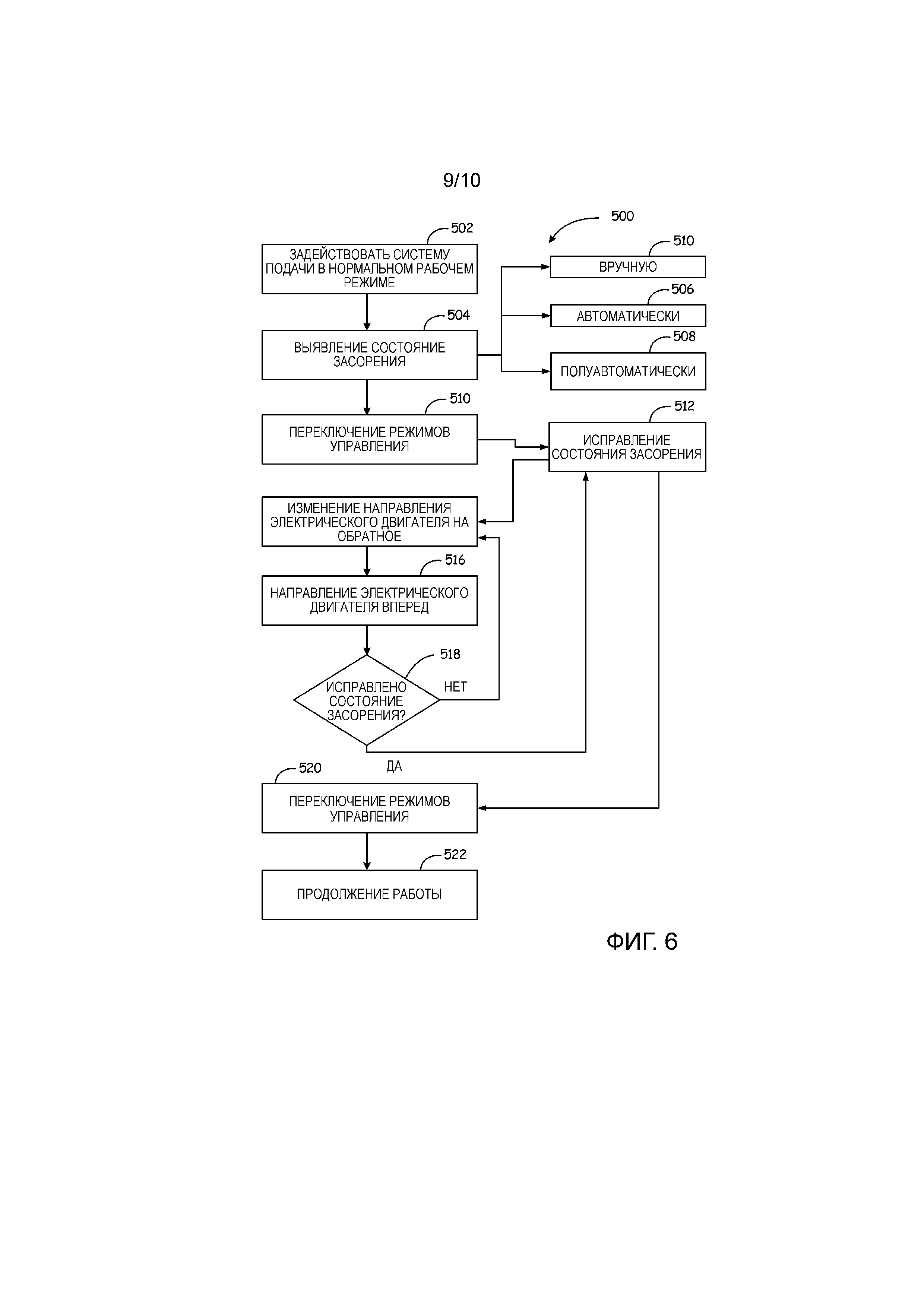
ФИГ.6 иллюстрирует иллюстративный способ 500 для приведения в действие сельскохозяйственной машины. С целью иллюстрации, но не в качестве ограничения, способ 500 будет описан в контексте комбайна 200, проиллюстрированного на фиг.3.
В блоке 502 подсистема 203 подачи задействована в нормальном режиме, в котором механизм подачи (например, ускоритель подачи и/или молотильный цилиндр) вращается в направлении вперед первым механизмом 264 привода.
В блоке 504 выявляется состояние затора. Это может проделываться автоматически (блок 506), полуавтоматически (блок 508) или вручную (блок 510). Например, оператор визуально обнаруживает, что подсистема 203 подачи заедает. В другом примере датчики 280 генерируют сигналы датчиков, показывающие рабочие параметры подсистемы 203 подачи (например, крутящий момент, скорость, скорость потока и т.д.). Сигналы датчиков используются контроллером 262 для определения состояния затора, при этом оператору предоставляется показание (например, визуальное, звуковое и т.д.). Например, контроллер 262 сравнивает получаемые сигналы датчиков с пороговыми значениями. В одном примере пороговые значения могут быть основаны на установках производителя. В еще одном примере пороговые значения основаны на полученных прежде сигналах датчиков.
В блоке 510 режим управления переключается с нормальной работы на исправления состояния затора. Это может проделываться автоматически, полуавтоматически или вручную. Например, в блоке 510 оператор может приводить в действие управляющий переключатель (переключатели) в отделении оператора, и/или контроллер 262 может автоматически выполнять одну или более операций. В одном примере блока 510 первый механизм 264 привода выключается (например, посредством первой остановки первого механизма привода), а соединительный механизм 278 приводится в действие с включением второго механизма 266 привода.
В блоке 512 состояние затора исправляется. В одном примере блока 512, в блоке 514 механизмом 266 привода управляют таким образом, чтобы качать и/или вращать механизм подачи в обратном направлении. В одном конкретном примере в блоке 514 контроллер 262 осуществляет предварительно заданную управляющую последовательность, которая особым образом управляет механизмом 266 привода. Например, механизм подачи может вращаться в определенном угловом диапазоне или в течение определенного периода времени. В качестве альтернативы или в дополнение, механизм подачи может качаться вперед и назад определенное число раз. В блоке 516 механизмом 266 привода управляют таким образом, чтобы приводить в действие механизм подачи в направлении вперед, а используя датчики 256 контроллер 262 определяет, исправлено ли состояние затора. Если нет, способ возвращается в блок 514. Это может происходить автоматически с помощью контроллера 262 или в ответ на ввод оператора, чтобы продолжать процесс исправления блока 512.
Если состояние затора исправлено, в блоке 520 режим управления переключается назад в нормальный рабочий режим посредством отсоединения второго механизма 266 привода и повторного соединения первого механизма 264 привода. Нормальный рабочий режим продолжается в блоке 522.
В представленном обсуждении упоминались процессоры. В одном примере процессор содержит вычислительный процессор с ассоциированной памятью и схемой синхронизации, отдельно не показанный. Он является функциональной частью систем или устройств, к которым они относятся и активируются и облегчают функциональность других элементов или частей в данных системах.
Также, обсуждается количество дисплеев пользовательского интерфейса. Они могут принимать большое множество различных форм и могут иметь большое множество различных приводимых пользователем в действие расположенных на них механизмов ввода. Например, приводимыми пользователем в действие механизмами ввода могут быть текстовые окна, окна флажков, иконки, информация по ссылкам, выпадающие меню, окна поиска и т.д. Они также могут приводиться в действие большим множеством различных способов. Например, они могут приводиться в действие с использованием указательного устройства (такого как шаровой манипулятор или мышь). Они могут приводиться в действие с использованием клавиш аппаратных средств, переключателей, джойстика или клавиатуры, ползунковых переключателей или вогнутых кнопок, нажимаемых большим пальцем, и т.д. Они также могут приводиться в действие с использованием виртуальной клавиатуры или других виртуальных исполнительных механизмов. В дополнение, когда экраном, на котором они отображаются, является чувствительный к прикосновению экран, они могут приводиться в действие с использованием сенсорных жестов. Также, когда устройство, которое их отображает, имеет компоненты распознавания речи, они могут приводиться в действие с использованием голосовых команд.
Также описывается хранилище (хранилища) данных. Следует отметить, что каждое из них может быть разбито на множество хранилищ данных. Все могут быть локальными для систем, имеющих к ним доступ, все могут быть удаленными, или некоторые могут быть локальными, тогда как другие являются удаленными. В данном документе предусматриваются все данные конфигурации. Хранилище данных может представлять собой все типы материальных энергозависимых и энергонезависимых машиночитаемых запоминающих устройств. Также оно может представлять собой компьютерный носитель информации. Память, например, может хранить машиночитаемые команды, которые при выполнении процессором, заставляют процессор выполнять любое из описанного выше или функций.
Также, фигуры показывают ряд блоков с функциональностью, приписываемой каждому блоку. Следует отметить, что может использоваться меньше блоков, поэтому функции выполняются меньшим числом элементов. Также, может использоваться больше блоков с функционалом, распределяемым между большим числом элементов.
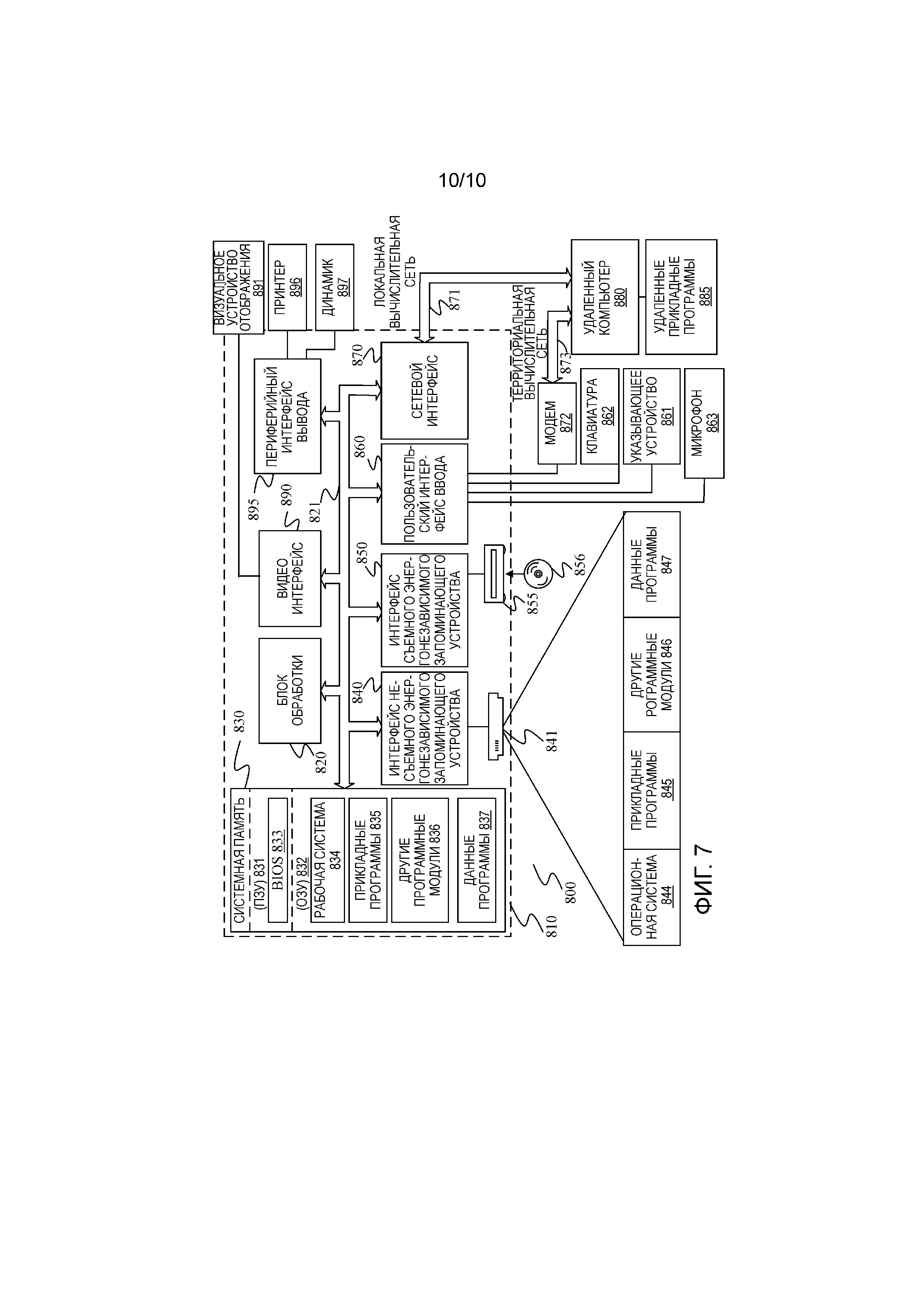
ФИГ.7 представляет собой один пример вычислительной среды, в которой могут быть развернуты элементы фиг.3 или (например) их части. Со ссылкой на ФИГ.7, иллюстративная система для реализации некоторых вариантов осуществления содержит вычислительное устройство общего назначения в виде компьютера 810. элементы компьютера 810 могут включать, но без ограничения, блок 820 обработки (который может содержать процессоры с предшествующих ФИГУР), системную память 830 и системную шину 821, которая соединяет различные элементы системы, включая системную память с блоком 820 обработки. Системная шина 821 может относиться к любому из нескольких типов конструкций шины, включая шину памяти или контроллер памяти, периферийную шину и локальную шину с использованием любой из множества архитектур шины. Память и программы, описанные относительно ФИГ.3, могут быть развернуты в соответствующих частях фиг.7.
Компьютер 810 обычно содержит множество машиночитаемых носителей. Машиночитаемым носителем может быть любой доступный носитель, к которому может иметь доступ компьютер 810, и он включает как энергозависимый, так и энергонезависимый носитель, съемный и несъемный носитель. В качестве примера, а не ограничения, машиночитаемый носитель может представлять собой компьютерный носитель информации и средства коммуникации. Компьютерный носитель информации отличается и не содержит модулированного сигнала передачи данных или несущей волны. Он представляет собой носитель информации аппаратного оборудования, включая как энергозависимый, так и энергонезависимый, съемный и несъемный носитель, реализованный любым способом или посредством любой технологии для хранения такой информации, как машиночитаемые команды, структуры данных, программные модули или другие данные. Компьютерный носитель информации представляет собой, но без ограничения, ОЗУ, ПЗУ, ЭСППЗУ, флэш-память или другую технологию памяти, CD-ROM, цифровые универсальные диски (DVD) или другое оптическое дисковое запоминающее устройство, магнитные кассеты, магнитную ленту, магнитное дисковое запоминающее устройство или другие магнитные запоминающие устройства или любой другой носитель, который может использоваться для хранения требуемой информации и который может быть доступен для компьютера 810. Средства коммуникации могут включать машиночитаемые команды, структуры данных, программные модули или другие данные в механизме транспортировки и содержат любой носитель доставки информации. Термин «модулированный сигнал передачи данных» означает сигнал, который имеет одну или более характеристических множеств или изменяется таким образом, чтобы кодировать информацию в сигнале.
Системная память 830 содержит компьютерный носитель информации в виде энергозависимого и/или энергонезависимого запоминающего устройства, такого как постоянное запоминающее устройство (ПЗУ) 831 и оперативное запоминающее устройство (ОЗУ) 832. В ПЗУ 831 обычно храниться базовая система 833 ввода-вывода (BIOS), содержащая основные подпрограммы, которые помогают передавать информацию между элементами внутри компьютера 810, например, в процессе запуска. ОЗУ 832 обычно содержит информационные и/или программные модули, которые являются быстро доступными и/или задействованы в настоящее время блоком 820 обработки. В качестве примера, а не ограничения, ФИГ.7 иллюстрирует рабочую систему 834, прикладные программы 835, другие программные модули 836, и данные 837 программы.
Компьютер 810 может также содержать другие съемные/несъемные энергозависимые/энергонезависимые компьютерные носители информации. Только в качестве примера, ФИГ.7 иллюстрирует накопитель 841 на жестком диске, который записывает на несъемный, энергонезависимый магнитный носитель, накопитель 855 на оптическом диске и энергонезависимый оптический диск 856 или считывает с него. Накопитель 841 на жестком диске обычно соединен с системной шиной 821 через интерфейс несъемного запоминающего устройства, такой как интерфейс 840, и накопитель 855 на оптическом диске обычно соединен с системной шиной 821 посредством интерфейса съемного запоминающего устройства, такого как интерфейс 850.
В качестве альтернативы или в дополнение, функции, описанные в данном документе, могут выполняться, по меньшей мере частично, с помощью одного или более логических элементов аппаратного оборудования. Например, и без ограничения, иллюстративные типы логических элементов аппаратного оборудования, которые могут использоваться, включают программируемые пользователем вентильные матрицы (FPGA), специализированные интегральные микросхемы (например, ASIC), стандартные продукты, ориентированные на приложение (например, ASSP), системы на кристалле (SOC), сложные программируемые логические устройства (CPLD) и т.д.
Накопители и связанные с ними компьютерные носители информации, описанные выше и проиллюстрированные на фиг.7, обеспечивают хранение машиночитаемых команд, структур данных, программных модулей и других данных для компьютера 810. На фиг.7, например, накопитель 841 на жестком диске проиллюстрирован в виде запоминающей рабочей системы 844, прикладных программ 845, других программных модулей 846 и данных 847 программы. Следует заметить, что данные элементы могут быть либо такими же, как рабочая система 834, прикладные программы 835, другие программные модули 836 и данные 837 программы, или отличаться от них.
Пользователь может вводить команды и информацию в компьютер 810 через устройства ввода, такие как клавиатура 862, микрофон 863 и указывающее устройство 861, такое как мышь, шаровой манипулятор или сенсорная панель. Другие устройства ввода (не показано) могут содержать джойстик, игровой манипулятор, спутниковую антенну, сканер, рычаги, клавиши, рулевые колеса, ножные педали и тому подобное. Данные и другие устройства ввода часто соединены с блоком 820 обработки через пользовательский интерфейс 860 ввода, который соединен с системной шиной, но может быть соединен посредством другого интерфейса и шинных структур. Визуальное устройство 891 отображения или устройство отображения другого типа также соединено с системной шиной 821 через интерфейс, такой как видео интерфейс 890. В дополнение к монитору, компьютеры также могут содержать другие периферийные устройства вывода, такие как динамики 897 и принтер 896, который может быть соединен через периферийный интерфейс 895 вывода.
Компьютер 810 задействуют в сетевом окружении с использованием логических соединений (таких как локальная вычислительная сеть - LAN, или территориальная вычислительная сеть WAN) с одним или более удаленными компьютерами, такими как удаленный компьютер 880.
При использовании в сетевом окружении LAN компьютер 810 соединяют с LAN 871 через сетевой интерфейс или адаптер 870. При использовании в сетевом окружении WAN компьютер 810 обычно содержит модем 872 или другое средство создания связи через WAN 873, такое как интернет. В сетевом окружении программные модули могут храниться на удаленном запоминающем устройстве. ФИГ.7 иллюстрирует, например, что удаленные прикладные программы 885 могут находиться на удаленном компьютере 880.
Также необходимо заметить, что различные примеры, описанные в данном документе, могут быть объединены различными способами. То есть, части одного или более примеров могут быть объединены с частями одного или более других примеров. Все они предусматриваются в данном документе.
Пример 1 представляет собой сельскохозяйственную уборочную машину, содержащую жатку, систему подачи, выполненную с возможностью подачи материала из жатки в секцию обмолота по транспортировочному пути, при этом система подачи содержит вращающийся механизм подачи, и систему привода, выполненную с возможностью приведения механизма подачи в действие с вращением во время первого состояния для транспортировки материала по транспортировочному пути, и с возможностью обратного вращения механизма подачи во время второго состояния.
Пример 2 представляет собой сельскохозяйственную уборочную машину из любого или всех предшествующих примеров, в которой жатка выполнена с возможностью выполнения операции скашивания сельскохозяйственной культуры, а транспортировочный механизм содержит приемную камеру молотилки, расположенную между жаткой и вращающимся механизмом подачи.
Пример 3 представляет собой сельскохозяйственную уборочную машину из любого или всех предшествующих примеров, в которой вращающийся механизм подачи содержит ускоритель подачи, выполненный с возможностью ускорения материал в секцию обмолота.
Пример 4 представляет собой сельскохозяйственную уборочную машину из любого или всех предшествующих примеров, в которой вращающийся механизм подачи содержит молотильный цилиндр.
Пример 5 представляет собой сельскохозяйственную уборочную машину из любого или всех предшествующих примеров, в которой механизм подачи вращается в первом направлении вперед во время первого состояния и во втором, обратном направлении во время второго состояния, вторым состоянием является состояние затора механизма подачи.
Пример 6 представляет собой сельскохозяйственную уборочную машину из любого или всех предшествующих примеров, в которой система привода содержит первый и второй механизмы привода, и дополнительно содержит элемент трансмиссии, выполненный с возможностью выборочной передачи мощности от одного из первого или второго механизмов привода вращающемуся механизму подачи.
Пример 7 представляет собой сельскохозяйственную уборочную машину из любого или всех предшествующих примеров, в которой первый механизм привода содержит двигатель внутреннего сгорания, а второй механизм привода содержит электрический двигатель.
Пример 8 представляет собой сельскохозяйственную уборочную машину из любого или всех предшествующих примеров, в которой элемент трансмиссии содержит подвижный соединительный механизм, который выполнен с возможностью перемещения между первым и вторым положениями, при этом первое положение функционально соединяет первый механизм привода с механизмом подачи, а второе положение функционально соединяет второй механизм привода с механизмом подачи.
Пример 9 представляет собой сельскохозяйственную уборочную машину из любого или всех предшествующих примеров, в которой соединительный механизм содержит кольцо включения, имеющее группу зубцов, выполненную с возможностью зацепления соответствующих групп зубцов, связанных с первым механизмом привода, вторым механизмом привода и механизмом подачи.
Пример 10 представляет собой сельскохозяйственную уборочную машину из любого или всех предшествующих примеров, в которой кольцо включения переключается между первым и вторым положениями с использованием по меньшей мере одного из гидравлического исполнительного элемента и пневматического исполнительного элемента.
Пример 11 представляет собой сельскохозяйственную уборочную машину из любого или всех предшествующих примеров и дополнительно содержащую контроллер, выполненный с возможностью управления элементом трансмиссии.
Пример 12 представляет собой сельскохозяйственную уборочную машину из любого или всех предшествующих примеров, в которой контроллер выполнен с возможностью определения второго состояния на основании одного или более сигналов датчиков из системы подачи, и с возможностью предоставления оператору обратной связи, указывающей на второе состояние.
Пример 13 представляет собой сельскохозяйственную уборочную машину из любого или всех предшествующих примеров, в которой контроллер выполнен с возможностью управления вторым механизмом привода для качания механизма подачи.
Пример 14 представляет собой мобильную машину, содержащую первую подсистему, содержащую силовую установку, выполненную с возможностью приведения в движение мобильной машины, вторую подсистему, первый механизм привода, второй механизм привода, соединительный механизм и контроллер, выполненный с возможностью приведения в действие соединительного механизма с выборочным соединением одного из первого или второго механизмов привода для приведения в действие одного или более элементов второй подсистема с изменяющейся скоростью и направлением.
Пример 15 представляет собой мобильную машину из любого или всех предшествующих примеров, в которой один или более элементов содержит вращающийся элемент, имеющий вал, и при этом соединительный механизм выполнен с возможностью перемещения между первым положением, в котором первый механизм привода функционально соединен с валом, и вторым положением, в котором второй механизм привода функционально соединен с валом.
Пример 16 представляет собой мобильную машину из любого или всех предшествующих примеров, в которой контроллер содержит исполнительный элемент, выполненный с возможностью приведения в действие соединительного механизма между первым и вторым положениями, при этом исполнительный элемент приводит в действие соединительный механизм по меньшей мере одним из способов: гидравлически, пневматически или электронно.
Пример 17 представляет собой мобильную машину из любого или всех предшествующих примеров, в которой соединительный механизм содержит кольцо включения, имеющее группу зубцов, выполненную с возможностью зацепления соответствующих групп зубцов, связанных с первым механизмом привода, вторым механизмом привода и механизмом подачи.
Пример 18 представляет собой мобильную машину из любого или всех предшествующих примеров, в которой первый механизм привода содержит первое вращающееся соединительное средство, приводимое в действие с возможностью вращения первым двигателем, а второй механизм привода содержит второе вращающееся соединительное средство, приводимое в действие с возможностью вращения вторым двигателем.
Пример 19 представляет собой способ управления сельскохозяйственной уборочной машиной, включающий приведение в действие системы подачи сельскохозяйственной уборочной машины, при этом приведение в действие включает вращение механизма подачи в направлении вперед для транспортировки материала по транспортировочному пути через секцию обмолота, причем механизм подачи содержит по меньшей мере одно из ускорителя подачи или молотильного цилиндра, определение состояния затора механизма подачи и управление системой подачи таким образом, чтобы вращать механизм подачи в обратном направлении для исправления состояния затора.
Пример 20 представляет собой способ из любого или всех предшествующих примеров, в котором управление системой подачи включает отсоединение первого механизма привода от механизма подачи, соединение второго механизма привода с механизмом подачи и управление работой второго механизма привода.
Несмотря на то, что предмет изобретения был описан на языке, специфичном для структурных признаков и/или методологических действий, следует понимать, что отсутствует необходимость в ограничении предмета изобретения, по определению приложенной формулы изобретения конкретными признаками или действиями, описанными выше. Вместо этого, конкретные признаки и действия, описанные выше, раскрыты в виде иллюстративных форм реализации формулы изобретения.
Реферат
Изобретение относится к сельскохозяйственному машиностроению. Уборочная машина содержит жатку и систему подачи, выполненную с возможностью подачи материала из жатки через секцию обмолота по транспортировочному пути. Система подачи содержит транспортировочный механизм, который транспортирует материал из жатки во вращающийся механизм подачи, и систему привода, выполненную с возможностью приведения механизма подачи в действие с вращением во время первого состояния для транспортировки материала по транспортировочному пути, и с возможностью обратного вращения механизма подачи во время второго состояния. Изобретение обеспечивает повышение эффективности работы сельскохозяйственных машин. 6 з.п. ф-лы, 10 ил.
Комментарии