Устройство и способ развертывания объекта или груза на дне моря - RU2201374C2
Код документа: RU2201374C2
Чертежи
Описание
Настоящее изобретение касается устройства согласно преамбуле пункта 1.
Настоящее изобретение касается системы направления, регулирования и позиционирования, используемой во время развертывания и/или подъема грузов (блоков) до ±1000 т на дне моря на большой глубине. По конструкции система содержит главный модуль и контр-модуль меньшего размера, которые соединены один с другим каркасом.
Вследствие своих функций каркас системы может крепиться непосредственно к грузу или попеременно к любому подъемному средству, таким образом закрепляя грузы (блоки), предназначенные для развертывания.
Равным образом, система может освобождать указанные грузы в любое нужное время.
Система также содержит средства приведения в движение и регулирования момента, дающие возможность управлять поведением груза, разворачиваемого сквозь всю толщу воды.
Так как нефть и газ в море могут также разрабатываться с помощью плавучих эксплуатационных платформ, такая эксплуатация месторождений нефти и газа требует развертывания на дне моря некоторого количества тяжелых объектов, более того, эти объекты должны устанавливаться на дне моря с относительно высокой точностью.
Вследствие того, что в наши дни разведка нефти проводится на большой глубине, достижение требующейся точности значительно затруднено. Для достижения такой точности согласно традиционным способам обычно используется крановое судно. Грузы опускаются на дно моря с помощью вспомогательных регулирующих тросов, предусмотренных снаряжением этого судна и/или одной или более вспомогательных установочных опор.
Использование таких способов является чрезвычайно дорогостоящим. Они были разработаны для регулирования вращающего момента в средствах установки, вызываемого главным образом изменением профилей течения, а также использованием проволочных канатов, не уравновешивающих вращающего момента. К тому же, задачей также является направление груза к его конечному курсу в требующийся целевой участок.
Задачей изобретения поэтому является разработка системы и соответствующего способа, с помощью которых грузы (блоки) будут развертываться, контролироваться и точно устанавливаться на морском дне с меньшими затратами и быстрее, чем с помощью обычных технологий установки.
Эта задача согласно настоящему изобретению достигается согласно отличительным признакам пункта 1. Таким образом, можно снабдить устройство первыми и вторыми средствами приведения в движение, закрепленными на корпусе, причем первые и вторые средства приведения в движение расположены с противоположных сторон средств для крепления, с возможностью освобождения, объекта или груза.
При этом обеспечивается механизм, предотвращающий скручивание. Кроме того, с помощью поворотных движителей положение устройства и также груза, относительно груза, может регулироваться и управляться.
Согласно изобретению возможно, чтобы устройство было снабжено средством регулирования расстояния между первыми и вторыми средствами приведения в движение.
Также возможно, чтобы первые средства приведения в движение были расположены в первом модуле, а вторые средства приведения в движение расположены во втором модуле.
Согласно настоящему изобретению и для того, чтобы уменьшить эти традиционные затраты, система снабжена набором из четырех поворотных движителей, работающих парами, причем каждый имеет конкретную функцию, а именно: функцию регулирования вращающего момента и функцию поступательного перемещения.
Эти поворотные движители установлены с каждой стороны каркаса системы по двое таким образом, чтобы достигалось упомянутое выше регулирование вращающего момента, предназначив оба нижних поворотных движителя для этой функции регулирования вращающего момента, а для достижения регулирования поступательного перемещения, предназначив оба верхних поворотных движителя для этой функции поступательного перемещения.
Помимо этого, второй или контр-модуль может перемещаться горизонтально над участком каркаса для улучшения регулирования вращающего момента и для уменьшения циклов напряжения во всей конструкции. Понятно, что этот каркас содержит систему зажима гидравлического действия, заканчивающуюся в предназначенных для этого зажимных переходниках, обеспеченных высокофрикционным материалом.
Согласно изобретению также возможно, чтобы средства приведения в движение были выполнены в виде поворотных движителей.
Как указывалось выше, возможно, чтобы первые средства приведения в движение располагались в первом модуле, а вторые средства приведения в движение располагались во втором модуле. Второй модуль может крепиться к коромыслу, при этом длина коромысла регулируемая.
Согласно предпочтительному примеру реализации изобретения, первый модуль крепится к устройству с возможностью отсоединения.
Согласно изобретению возможно, чтобы средство крепления, с возможностью освобождения, груза содержало гидравлические домкраты. Кроме того, средства для крепления, с возможностью освобождения, груза в устройстве могут быть снабжены переходниками, предназначенными для этой цели, покрытыми высокофрикционным материалом.
Для достижения требующейся точности при развертывании предпочтительно, чтобы устройство было обеспечено средствами, предназначенными для передачи информации в направлении объекта на дне моря и средствами приема отражения сигнала, передаваемого объекту, и процессором для вычисления отраженной информации для установления положения устройства относительно объекта. Также устройство может быть снабжено дистанционным лагом.
Средство для передачи информации может включать гидроакустическое оборудование, как например, гидроакустическое локационное оборудование с высокой разрешающей способностью. Когда положение развертываемого груза относительно объекта на дне моря определяется с помощью гидроакустического локационного оборудования, установка груза может завершаться с использованием дистанционного лага. Таким образом, можно дистанцировать эту окончательную работу позиционирования от поверхностной опоры.
Согласно настоящему изобретению предлагается не только устройство, но также способ развертывания объекта или груза на дне моря, отличающийся тем, что он включает этапы:
- перемещения объекта или груза в направлении дна моря с помощью троса,
- приложения усилия к объекту или грузу или к первому подъемному тросу, приблизительно на нижнем его конце с помощью
второго подъемного троса, и
- манипулирования положением объекта или груза с помощью устройства согласно одному из предшествующих пунктов, закрепленного близко к объекту или грузу. Кроме того,
во время развертывания объекта или груза возможно, чтобы объект или груз был поднят по меньшей мере частично с помощью дополнительного подъемного троса.
Согласно изобретению возможно, что во время развертывания объекта или груза позиционирование устройства осуществляется использованием дифференциальной глобальной системы позиционирования (ДГСП) системы навигации, сопряженной с системой гидроакустического ориентирования позиционирования (СГОП), прибора Доплера и волоконно-оптического гироскопа. Кроме того, возможно, что устройство передает информацию в направлении объекта на дно моря, что устройство получает отражение сигнала, передающегося объекту, и отраженная информация используется для установления положения устройства относительно объекта, причем установка груза выполняется с помощью дистанционного лага.
Согласно настоящему изобретению также возможно, что
- первый подъемный трос травят до тех пор, пока первый подъемный трос по меньшей
мере частично не ляжет на дно моря;
- подъем объекта или груза и части первого подъемного троса осуществляют посредством дополнительного подъемного троса, и
- манипулирование
положением объекта или груза осуществляют с помощью устройства.
Ниже изобретение поясняется подробно со ссылкой на чертежи.
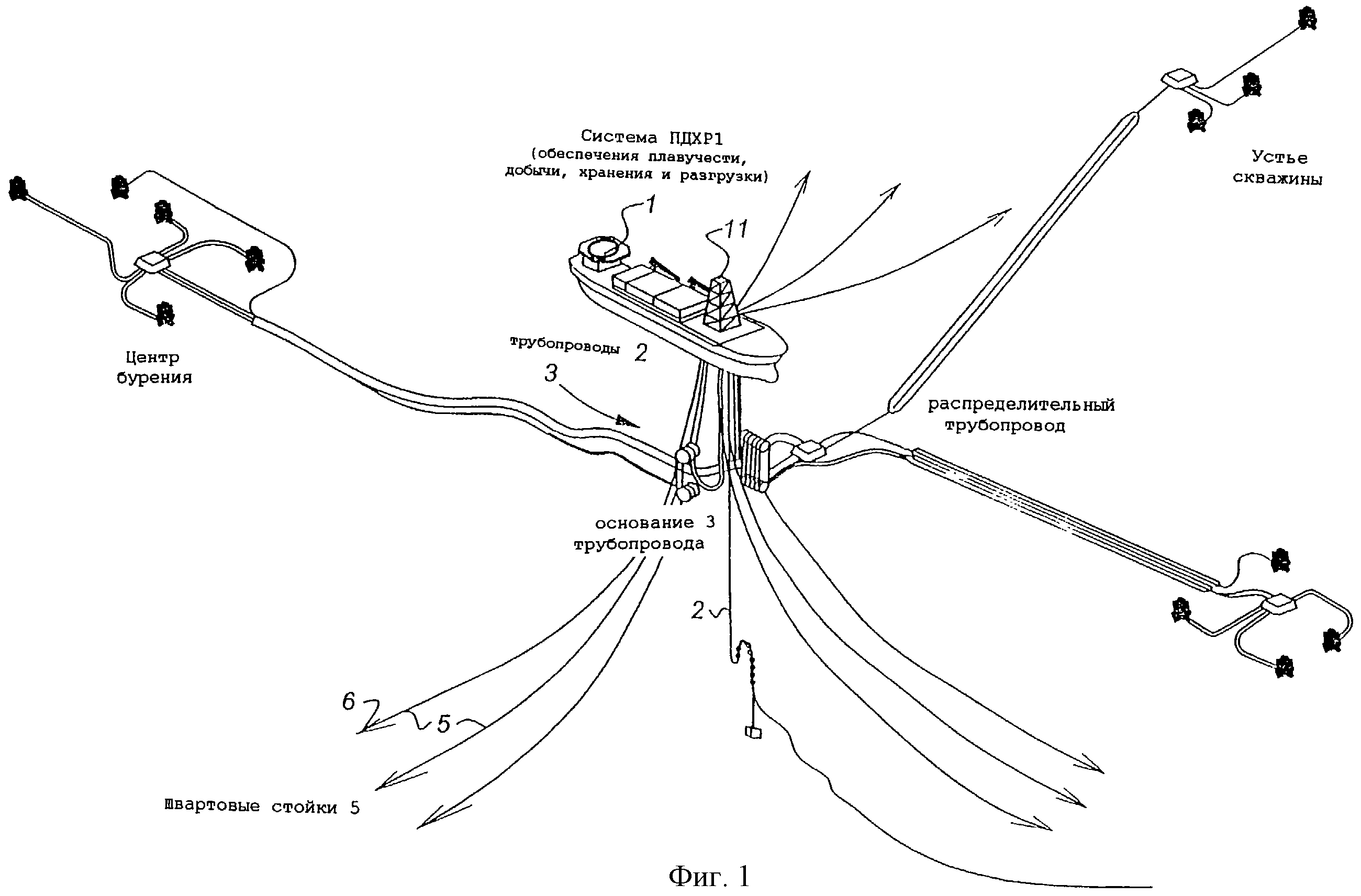
Фиг. 1 изображает схематический вид сверху системы, обеспечивающей плавучесть, добычу, хранение и разгрузку (ПДХР), предназначенной для нефтехимической добычи в открытом море.
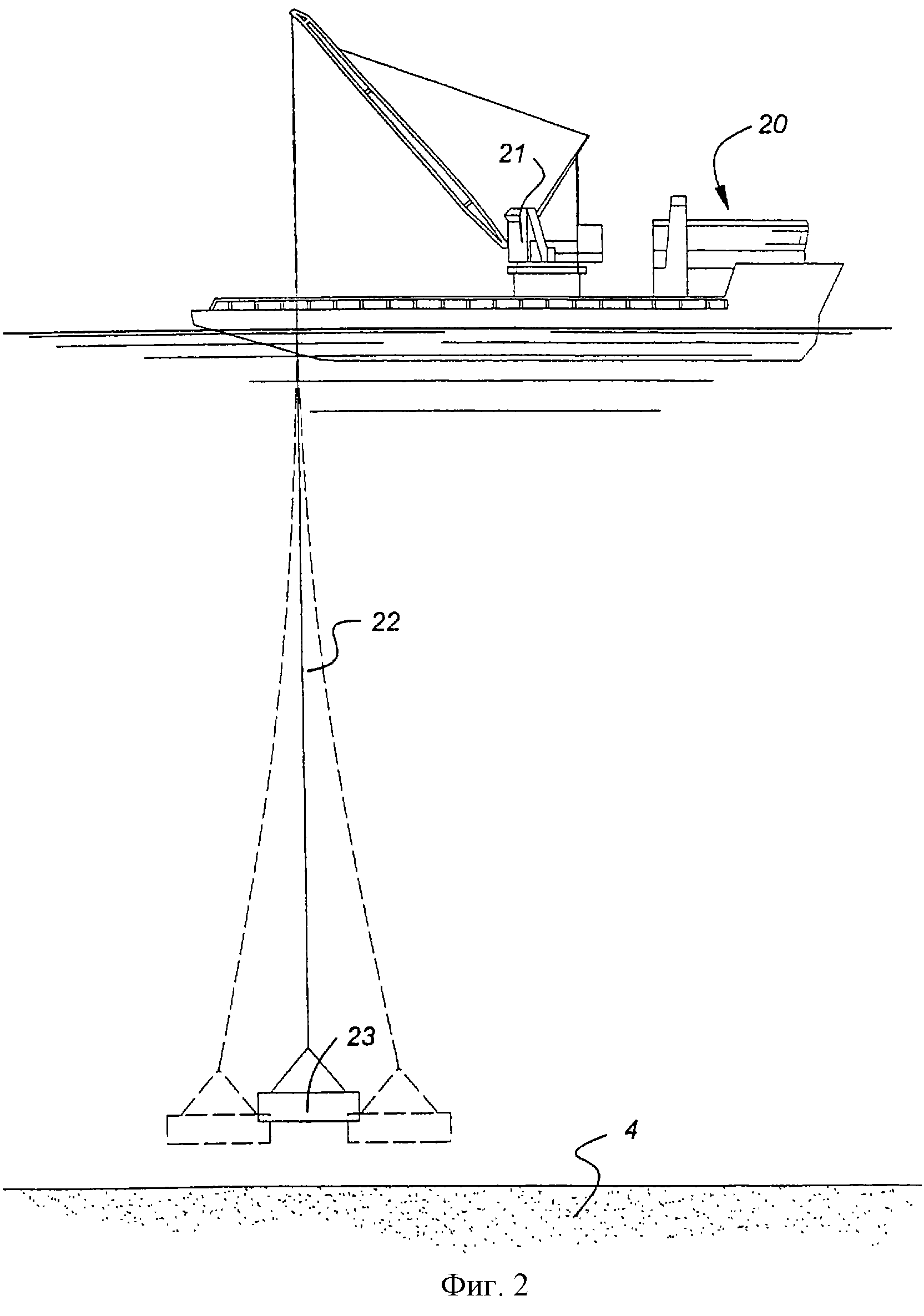
Фиг. 2 показывает крановое судно согласно предшествующему уровню техники, с изображением груза, установленного на крановом блоке с относительно длинными проволочными канатами, вследствие чего видно, что на большой глубине контролирование груза фактически невозможно.
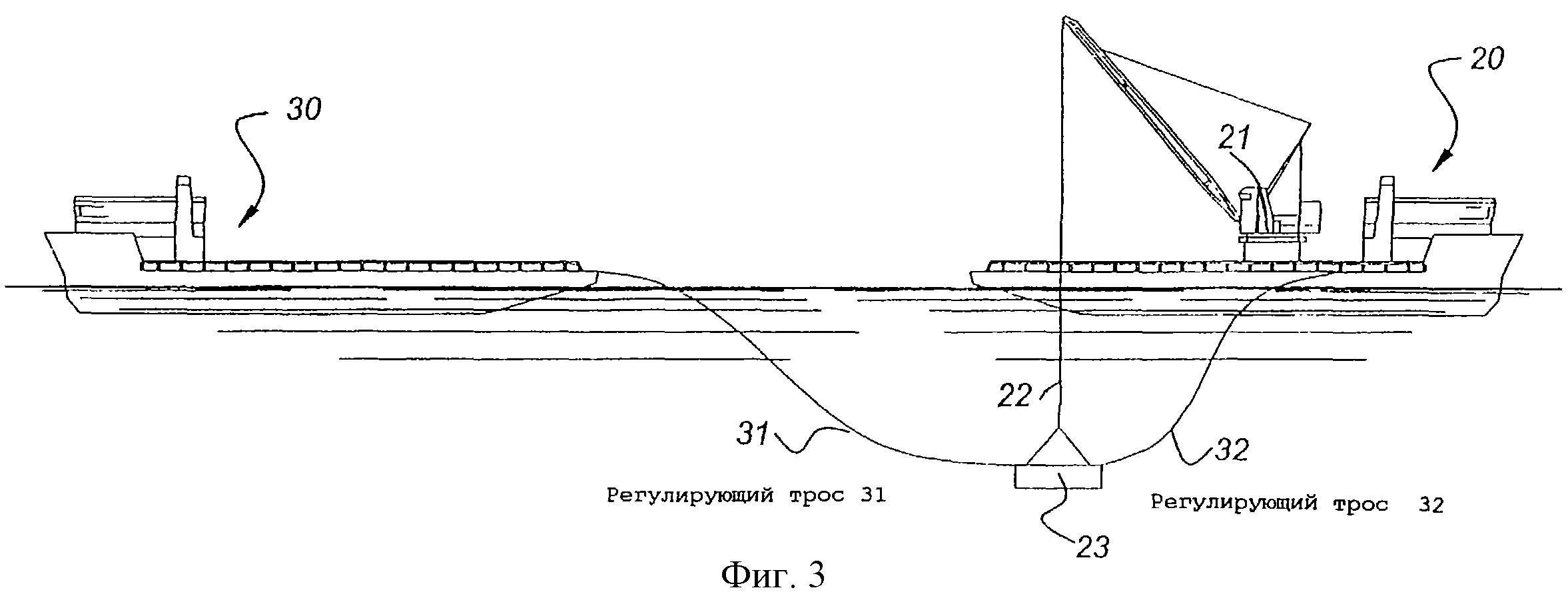
Фиг. 3 показывает крановое судно согласно предшествующему уровню техники, с изображением груза, установленного не только на крановом блоке судна; но также закрепленного с помощью вспомогательных проволочных канатов с обеих сторон судна, а также на буксирном канате дополнительной поверхностной опоры, чтобы до определенной степени осуществлять управление грузом.
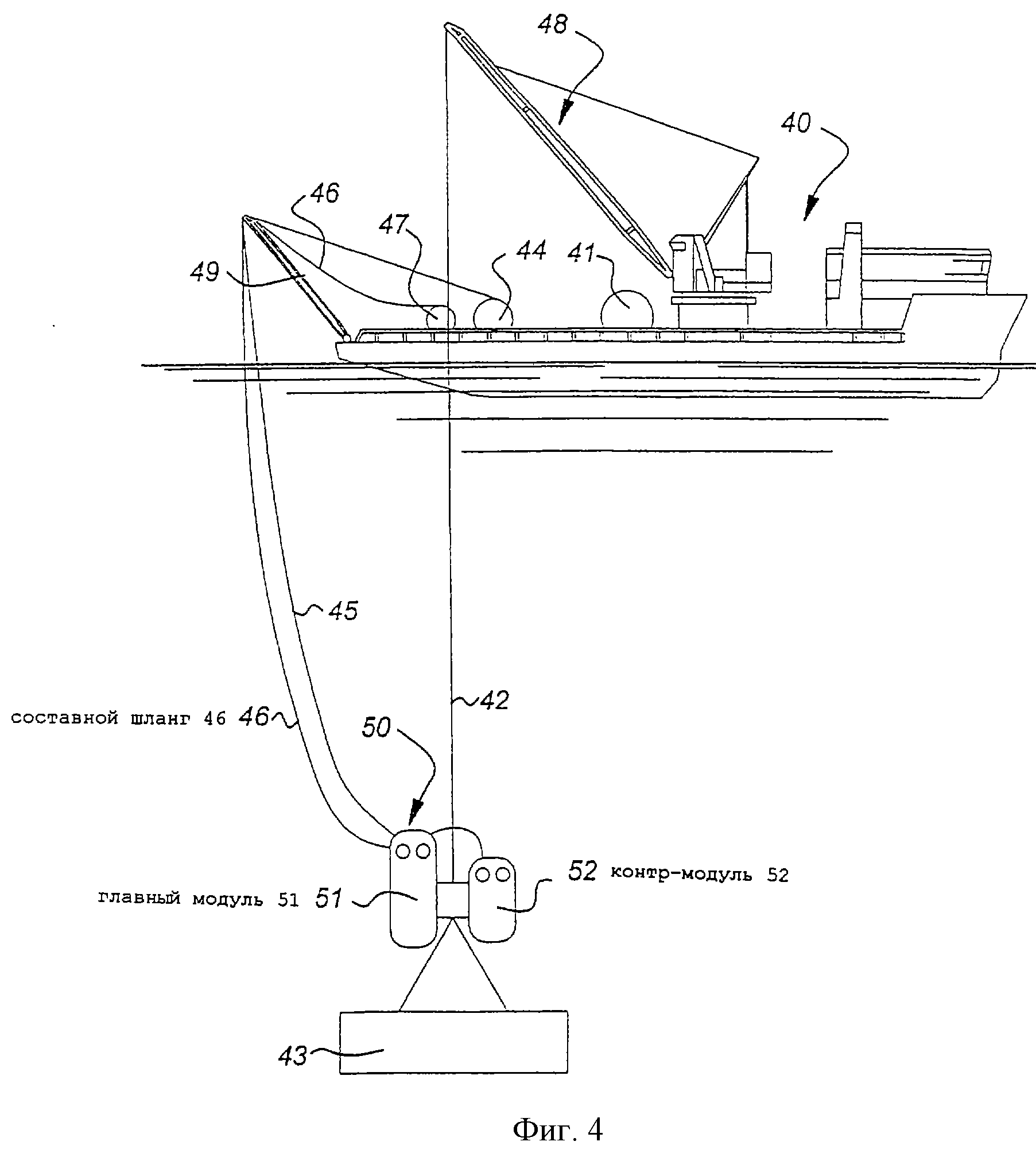
Фиг. 4 изображает крановое судно и систему для развертывания груза на дне моря и/или подъема груза со дна моря согласно настоящему изобретению.
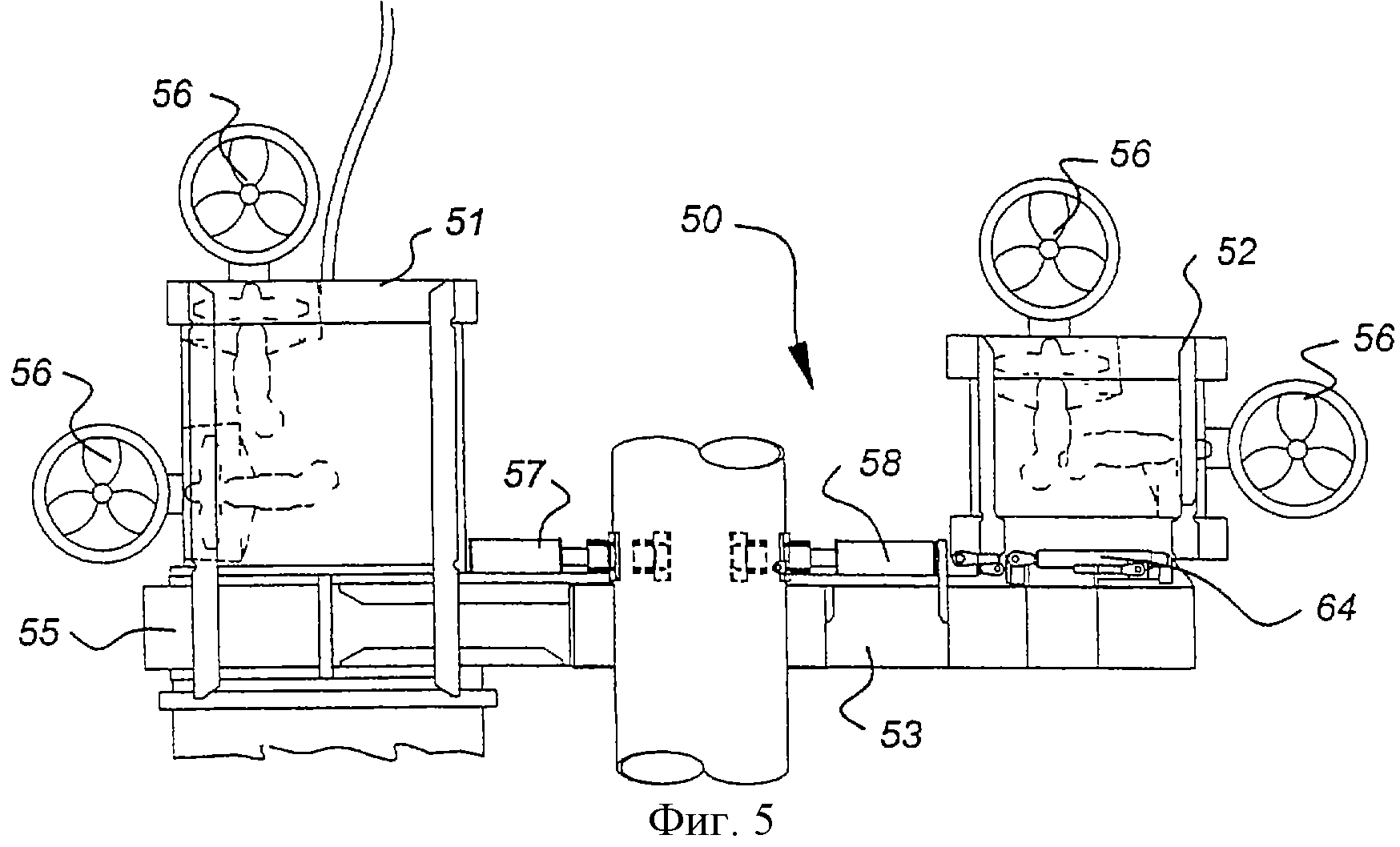
Фиг. 5 изображает подробно общий вид возможного примера реализации системы, совершающей действия, перечисленные на фиг. 4.
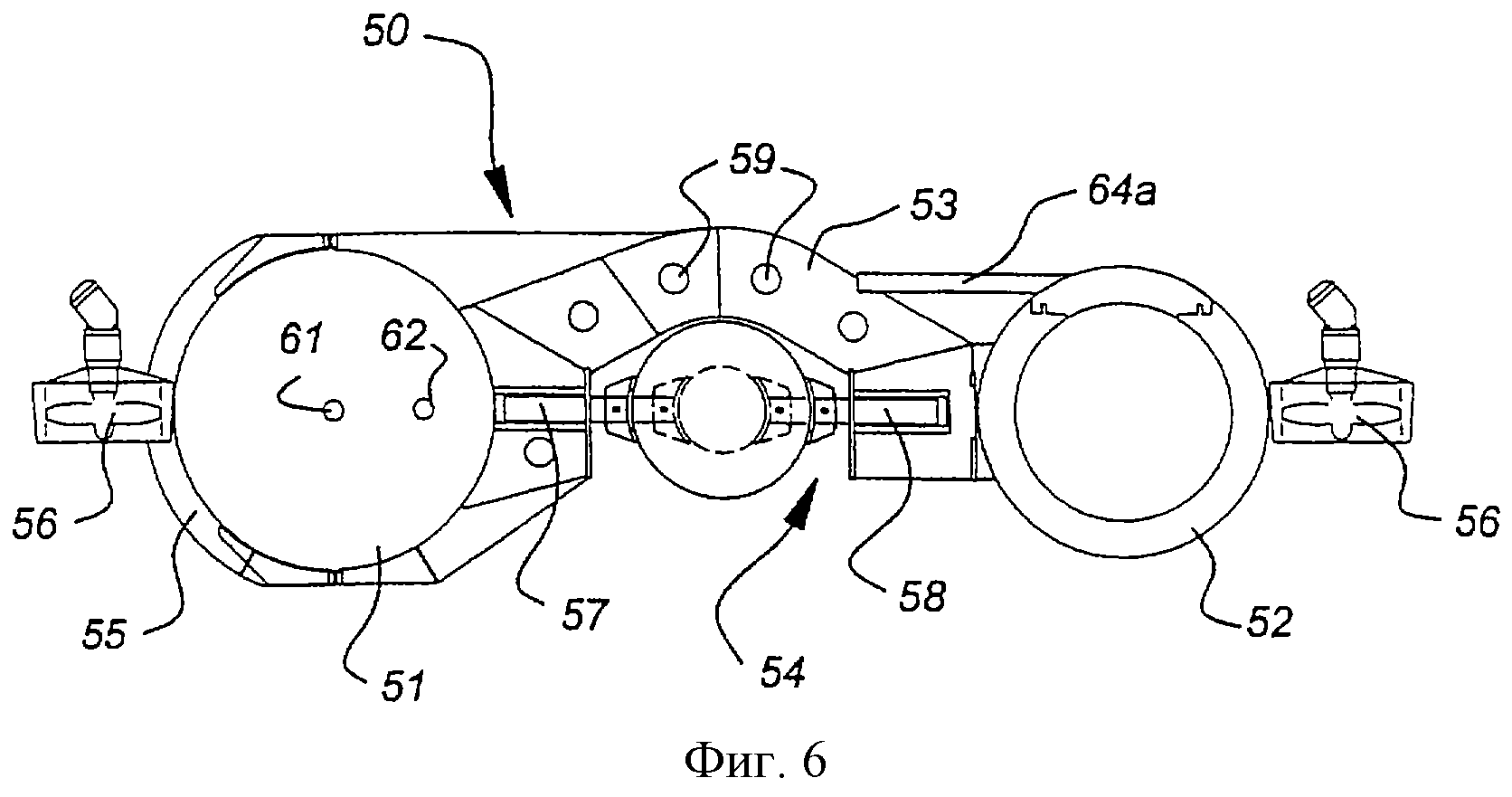
Фиг. 6 изображает систему, согласно фиг. 5, сверху.
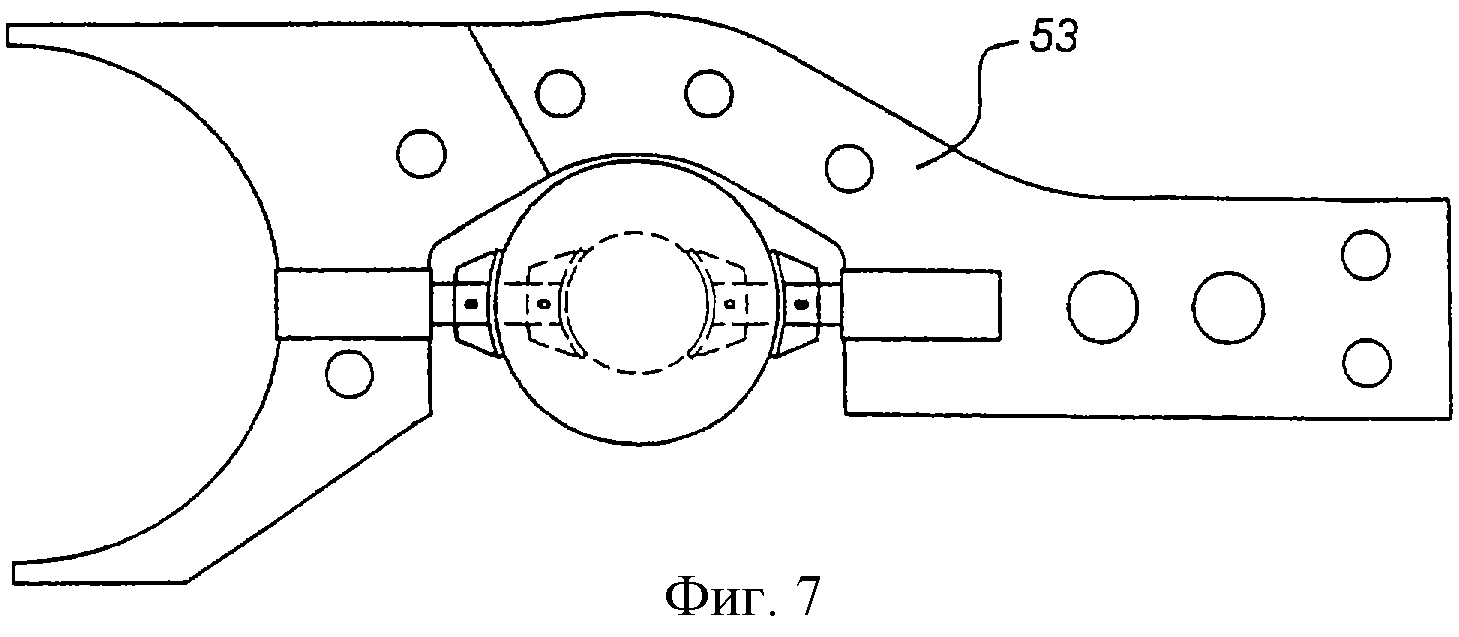
Фиг. 7 изображает деталь системы (переходные колодки для трубы и/или кранового блока) согласно фиг. 5.
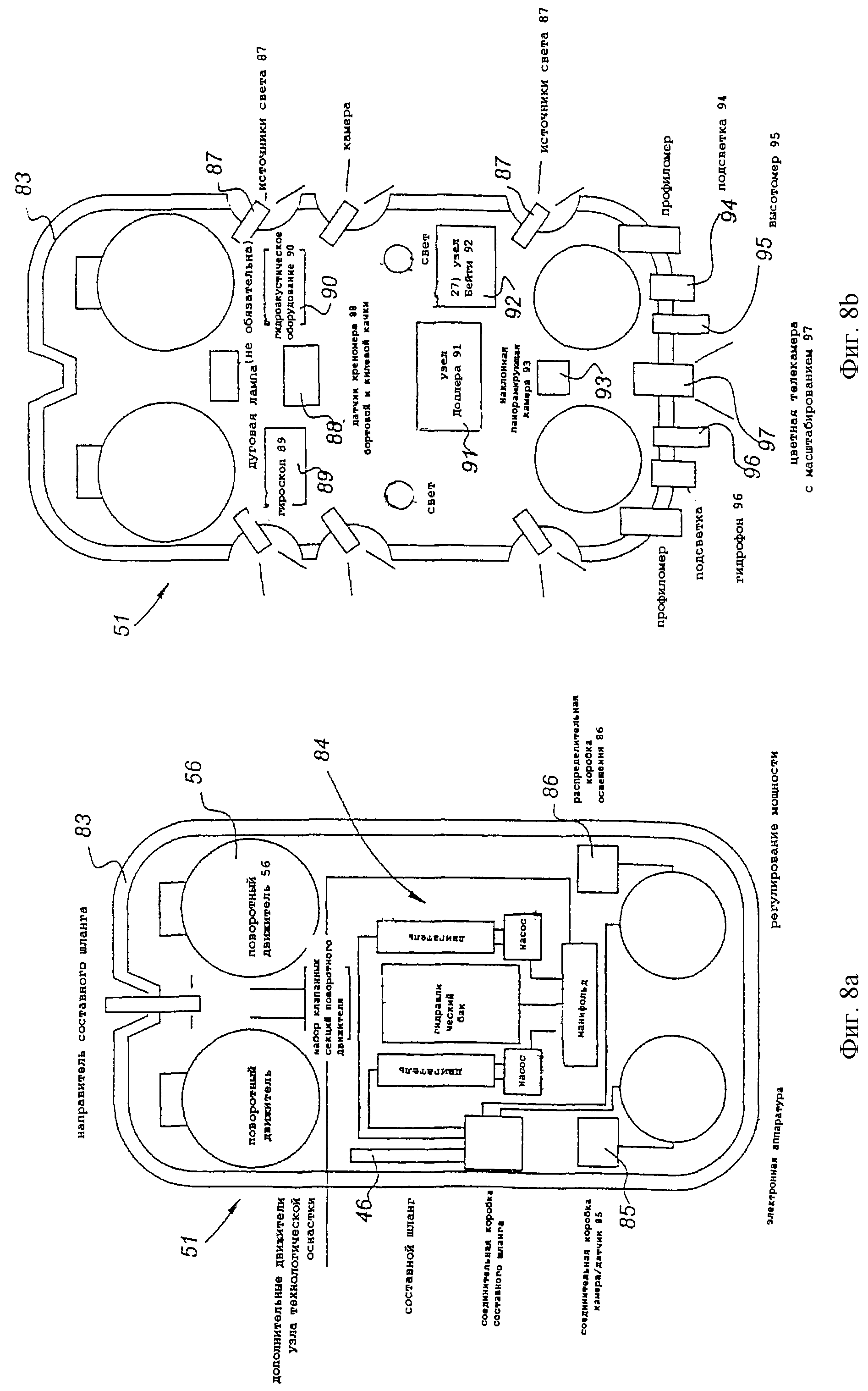
Фиг. 8, 8а изображают вид поперечного сечения главного модуля оборудования технических средств системы, необходимого для проведения развертывания и/или подъема согласно настоящему изобретению.
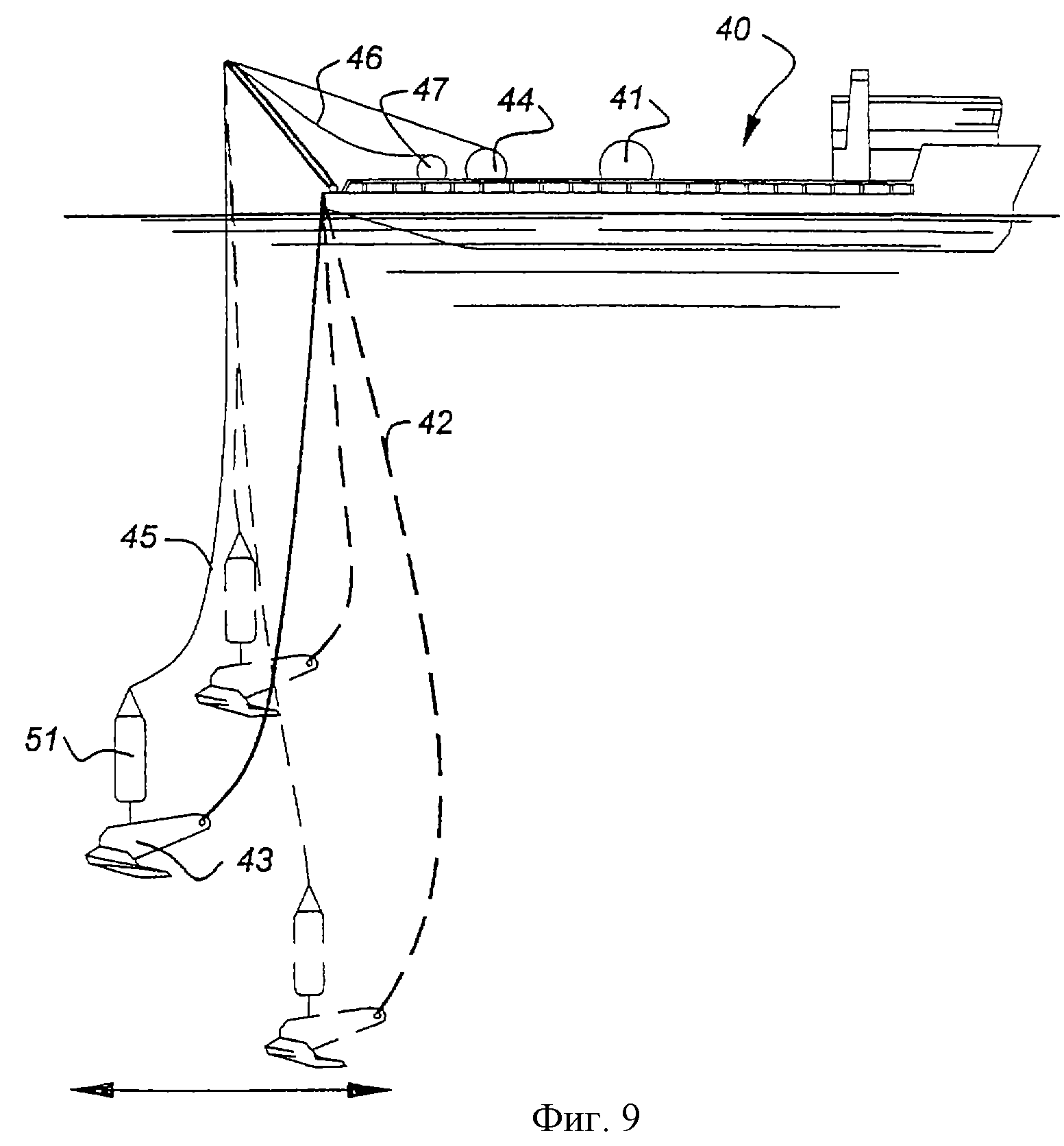
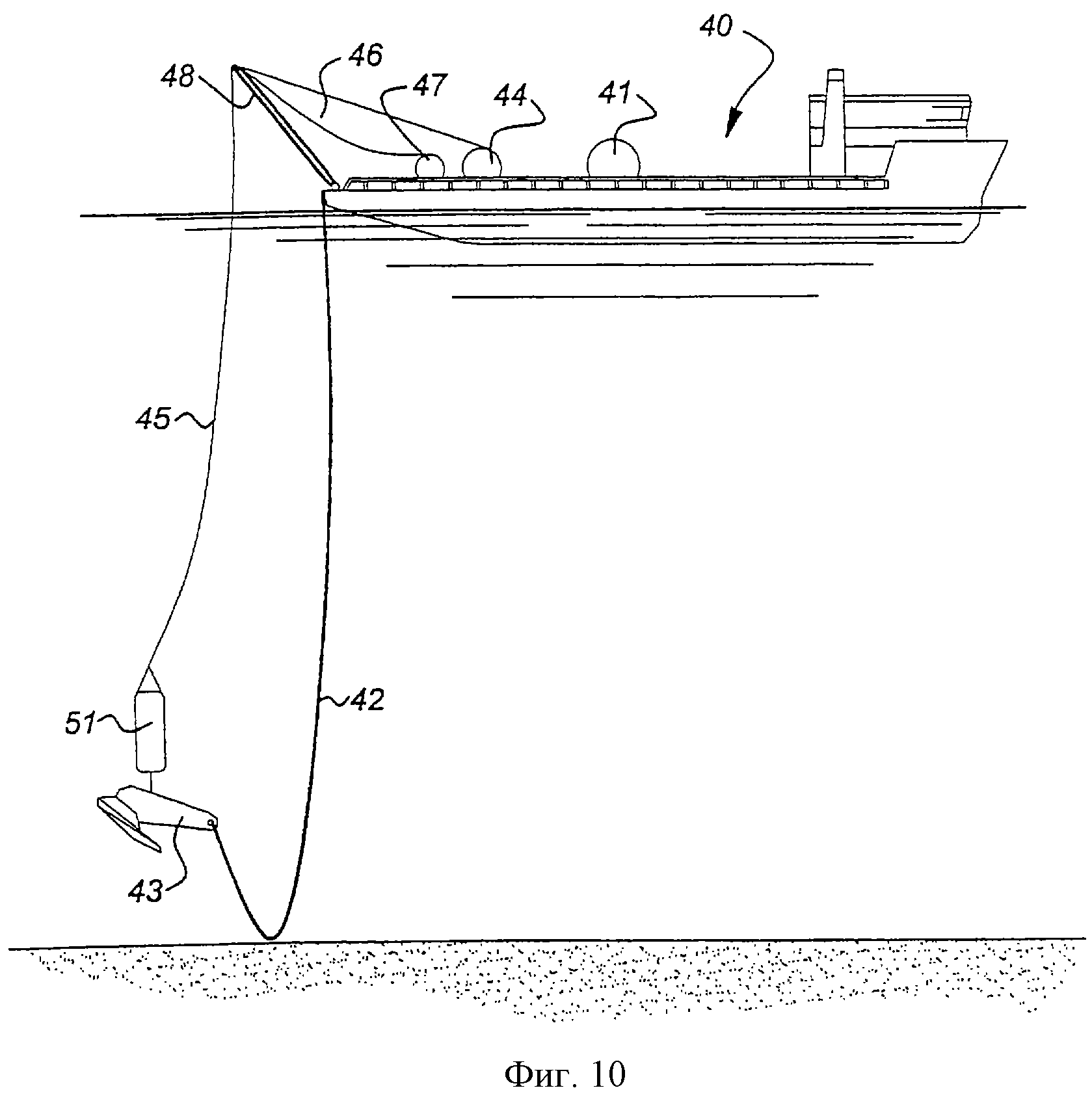
Фиг. 9 и 10 изображают возможное использование главного модуля системы в качестве автономного оборудования во время развертывания якоря и якорной цепи согласно настоящему изобретению.
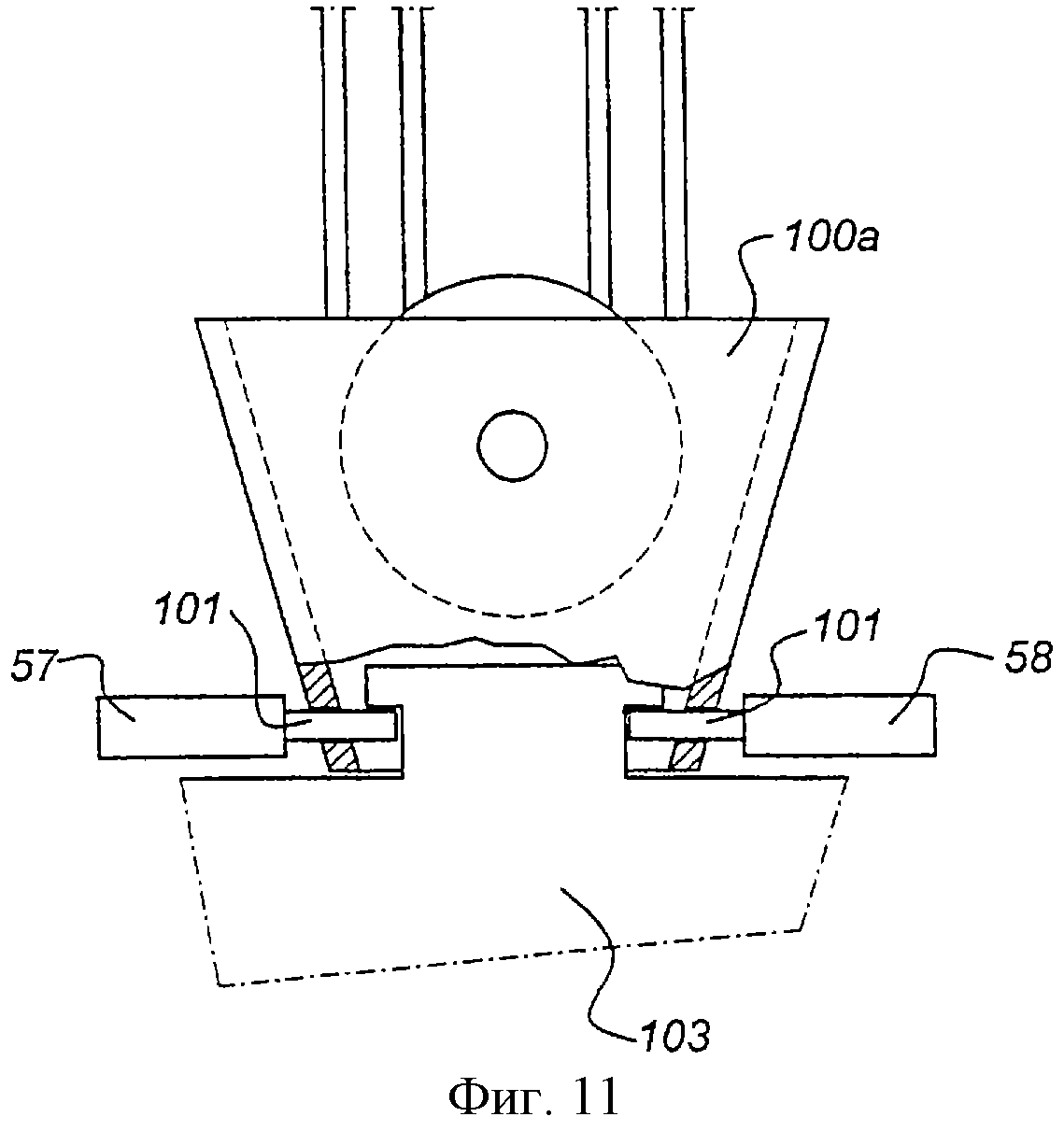
Фиг. 11 изображает крановой блок целевого назначения, используемый в сочетании с системой, согласно настоящему изобретению.
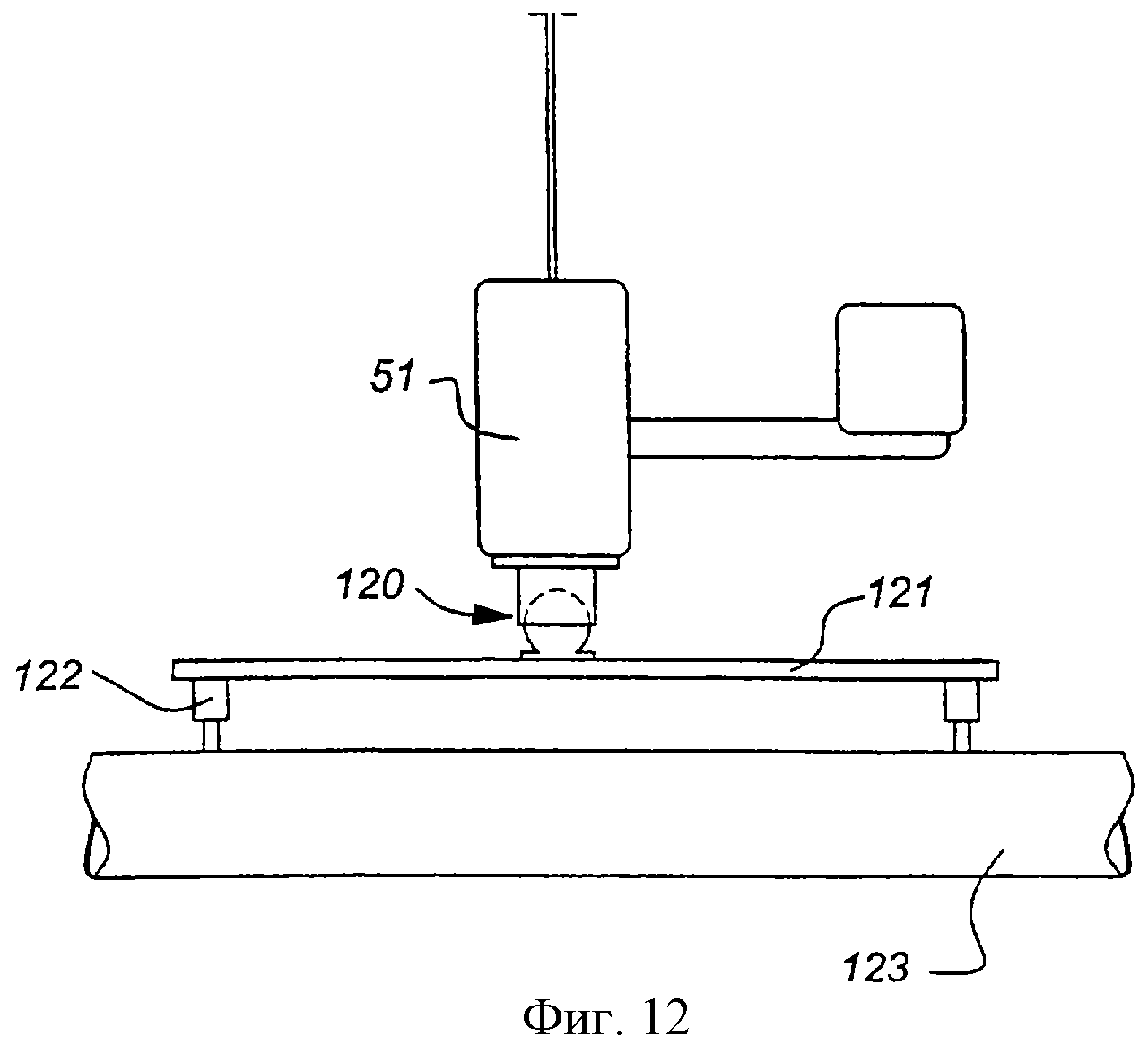
Фиг. 12 изображает пример реализации главного модуля системы, используемого для развертывания и установки катушки арматуры без помощи водолаза на большой глубине согласно настоящему изобретению.
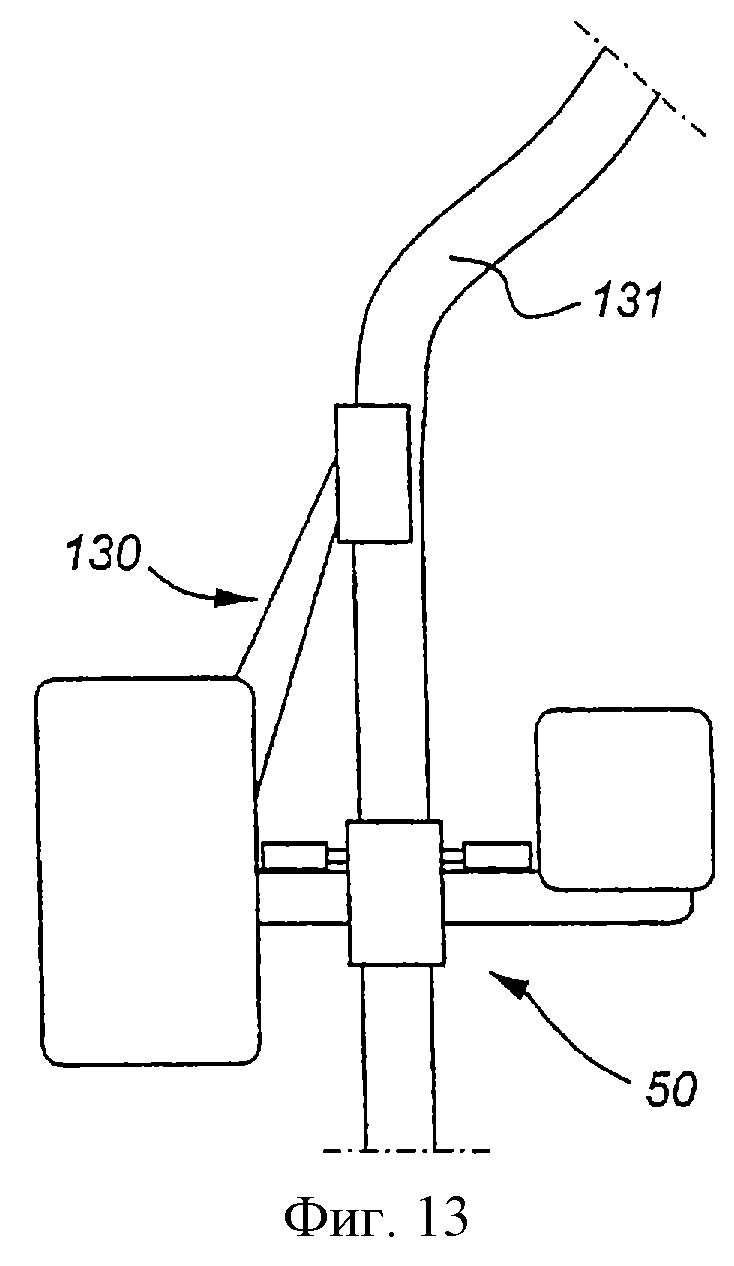
Фиг. 13 изображает пример реализации главного модуля системы, используемого для развертывания и установки жестких и/или гибких трубопроводов на основание трубопровода без помощи водолаза на большой глубине.
На фиг. 1 показана схема расположения системы ПДХР 1 с ее поворотным комплектом труб 11 для добычи, от которых отходят трубопроводы 2, соединяемые со своими основаниями 3 на дне моря. В течение срока службы, при добыче, для системы ПДХР необходимо оставаться в пределах допустимого динамического диапазона и поэтому система ПДХР 1 швартуется к дну 4 моря с помощью швартовых стоек 5, удерживаемых якорями 6.
Разработка нефти или газа согласно фиг. 1 с помощью добывающего судна 1 требует установки на дне 4 моря с относительно высокой точностью нескольких относительно тяжелых объектов.
Для обеспечения должной и надежной постановки на якорь с помощью швартовых стоек 5 необходимо, чтобы эти швартовые стойки 5 имели приблизительно одинаковую длину. На практике для такого применения могут использоваться якоря весом 50 т и более, которые устанавливаются на дне 4 моря с точностью до нескольких метров. Кроме того, не только якорь 6 сам по себе очень тяжелый, но также швартовая стойка, крепящаяся к якорю 6, имеет вес, в несколько раз превышающий вес самого якоря 6.
Кроме того, другие объекты, как например, "опорные плиты", "гравитационные основания трубопроводов", "эксплуатационные манифольды" и т. д., также относятся к объектам, которые должны устанавливаться на дно 4 моря с относительно высокой точностью.
Объекты, показанные на фигу. 1, необходимые при разработке морских месторождений нефти и газа, и которые должны устанавливаться на дне моря, являются не только очень тяжелыми, но также очень дорогостоящими.
На фиг. 2 показано судно 20 согласно предшествующему уровню техники, имеющее подъемные средства, как например, кран 21. Кран 21 имеет подъемный трос 22, с помощью которого объект или груз 4 может устанавливаться на дне 5 моря. Для установки груза 23 необходимо переместить поверхностную опору вместе с краном 21.
В результате этого в определенный момент инерция груза 23 будет преодолена, но вследствие ускорения груза 23 произойдет неуправляемая ситуация, и целевой участок будет пропущен. Из-за того, что подъемный трос 22 и груз 4 подвергаются влиянию, например течения, груз не будет двигаться прямо вниз при опускании подъемного троса. Кроме того, вертикальная качка судна, бортовая качка судна и т.д., будут оказывать негативное воздействие на достигаемую точность.
На фиг. 3 изображено возможное решение проблемы согласно предшествующему уровню техники, чтобы регулировать положение груза 23 при опускании подъемного троса 22. Для этого груз должен быть закреплен на вспомогательном тросе 31, который управляется от вспомогательного судна 30. Кроме того, груз 23 с вспомогательным тросом 32 может крепиться к судну 20.
Понятно, что груз 23 может устанавливаться на дне моря с более интенсивным регулированием благодаря решению согласно фиг. 3. Однако ясно, что использование вспомогательного судна 30 потребует очень больших затрат.
На фиг. 4 изображено крановое судно 40, снабженное устройством или системой для развертывания груза 43 на дне моря согласно настоящему изобретению. Судно 40 содержит первое подъемное средство, например лебедку 41, снабженную первым подъемным тросом 42. С помощью этого подъемного троса 42 груз 43, например опорная плита для бурения, может развертываться и устанавливаться на дне моря.
Как указывалось выше, разработка нефтяных и газовых месторождений с использованием плавучей эксплуатационной платформы требует установки нескольких тяжелых объектов, причем эти объекты должны быть установлены на дне моря с относительно высокой точностью. Так как в наши дни разработка должна выполняться на увеличивающихся глубинах, доходящих до 3000 м и более, достижение требующейся точности становится все труднее. Одна из проблем, которая должна быть решена, заключается в том, что подъемные тросы могут закручиваться.
Для регулирования положения груза 43 при развертывании груза для того, чтобы установить груз на дне моря в пределах требующейся точности, устройство или система 50 крепится к подъемному тросу 42. Предпочтительный пример реализации системы 50 будет описан со ссылкой на фиг. 5, 6 и 7.
Система 50 закрепляется на конце подъемного троса 42, например, к крановому блоку 100 (фиг. 11). Кроме того, система 50 может крепиться непосредственно к самому грузу 43. Система 50 содержит первый или главный модуль 51, обеспеченный приводными средствами, как например поворотные движители (фиг. 5 и 6). Система также содержит второй или контр-модуль 52. Этот контр-модуль 52 также обеспечен поворотными движителями. В работе поворотные движители главного модуля 51 и контр-модуля 52 будут установлены с противоположных сторон подъемного троса 42. Система связана с судном 40 посредством второго подъемного троса 45, который может приводиться в действие использованием второго подъемного средства, например второй лебедки 44. Второй подъемный трос 45, например, устанавливается за бортом с помощью A-образной рамы 49. Вторая лебедка 44 и дополнительный подъемный трос 45 обычно будут легче, чем первое подъемное средство 48 и основной подъемный трос 42 соответственно. Система также соединена с судном 40 с помощью составного шланга 46. Этот составной шланг может крепиться к подъемному тросу 45 или может отдельно опускаться от третьей лебедки 47. Электрические провода для обеспечения энергией системы 50 расположены, например, в составном шланге. В системе 50 обычно обеспечены средства для преобразования электрической энергии в гидравлическую энергию. Гидравлическая энергия затем будет использоваться для управления, например, поворотными движителями и вспомогательным оборудованием.
Так как в последнее время работа проводится на все более увеличивающихся глубинах, скручивание и вращение длинных подъемных тросов 42 становится все большей проблемой. Поскольку тяжелые грузы 43 крепятся внизу подъемного троса 42, это скручивание может вызвать довольно большой износ подъемных тросов, вследствие чего они могут быть серьезно повреждены. Этот износ может оказаться настолько сильным, что подъемный трос может порваться и груз 43 будет потерян. Другая проблема заключается в том, что из-за чрезмерно сильного скручивания тросов, тросы могут выскочить из блоков.
Вследствие того, что поворотные движители главного модуля 51 и контр-модуль 52 соответственно расположены с противоположных сторон подъемного троса 42, на подъемный трос 42 можно воздействовать вращающим моментом противоположного действия в обоих направлениях. Таким образом, с помощью системы образуется механизм, предотвращающий скручивание. Чтобы улучшить возможности этого механизма, предотвращающего скручивание, предпочтительно, чтобы расстояние между главным модулем 51 и контр-модулем 52 могло меняться.
На фиг. 5 изображен подробно общий вид возможного примера реализации системы 50 для развертывания груза на дне моря согласно настоящему изобретению. На фиг. 6 изображена система согласно фиг. 5 сверху.
Система 50 содержит главный модуль 51, контр-модуль 52 и коромысло 53. Коромысло может отсоединяться от главного модуля 51. Это означает, что главный модуль 51 также может использоваться отдельно (см. фиг. 9 и 10), как модульная система. Коромысло 53 выполнено с пазом 54. На противоположных сторонах этого паза 54 выполнены два домкрата 57, 58, по меньшей мере один из которых может перемещаться относительно другого. Между торцевыми поверхностями этих домкратов 57, 58 может быть зажат объект, например крановый блок 100. Чтобы улучшить контакт между домкратами 57, 58 и объектом соответствующие концы домкратов обеспечены зажимными колодками, покрытыми элементом трения 60 из высокофрикционного материала, как, например, специальная резина.
Как показано на фиг. 5 система снабжена поворотными движителями 56. В работе эти поворотные движители 56 могут использоваться для установки системы относительно целевого участка. Поворотные движители 56 могут приводиться в движение из первого положения в основном внутри системы 50 в положение, в котором поворотные движители выходят за пределы системы 50.
На фиг. 6 показано, что существуют два положения 61, 62 сверху главного модуля 51 для соединения главного модуля со вторым подъемным тросом 45 и/или с составным шлангом 46. Когда главный модуль 51 используется отдельно (фиг. 9 и 10) может использоваться положение 61. Главный модуль 51 будет уравновешиваться, когда модуль 61 развертывается в воздухе и под водой.
При использовании системы 50 соединение между судном 40 и системой 50 будет фиксироваться в положении 62, чтобы удержать систему в равновесии как в воздухе, так и под водой. Чтобы улучшить равновесие системы к системе 50 может крепиться вспомогательный противовес 55.
В работе устройство 50 не будет обладать плавучестью. Для улучшения подвижности системы под водой коромысло 53 выполнено с отверстиями 59 для предотвращения повреждения конструкции из-за увеличения давления при опускании и обеспечения быстрого слива при подъеме.
Как указывалось выше, целесообразно, когда контр-модуль 52 может перемещаться относительно главного модуля 51. Это может выполняться с использованием домкратов 64а. Установка контр-модуля 52 на коромысле 53 показана подробно на фиг. 7.
Система 50 согласно изобретению работает следующим образом.
При
развертывании груза 43 с судна 40 на дно моря груз будет развертываться с использованием подъемного троса 42. Чтобы контролировать положение груза при развертывании система 50 согласно изобретению
будет крепиться к крановому блоку 100 около его нижнего конца. Поворотные движители 56 в системе 50 работают от дистанционного управления с судна 40. Система 50 снабжена датчиками, дающими возможность
сообщения с судном 40. Когда груз 43 не перемещается в правильном направлении положение груза может регулироваться приведением в действие поворотных движителей 56 в системе 50 автоматически. Ссылаясь
на изобретение, позиционирование достигается сопряжением нескольких поверхностных и акустических систем ориентирования путем разработки программного обеспечения, которое включает, как минимум,
следующие комбинации при развертывании грузов:
ДГСП (дифференциальная глобальная система позиционирования);
СКБЛ (суперкороткая базовая линия);
Эффект Доплера и
ориентированный на север гироскоп.
Затем, со ссылкой на изобретение, как только груз достигает должной глубины, его установка будет завершаться использованием гидроакустической системы с высокой разрешающей способностью, сопряженной с прибором дистанционного лага и по меньшей мере одним зафиксированным объектом, в результате чего затем можно будет дистанцировать действия позиционирования от поверхностной опоры, а также от любых других акустических средств повторителей сигналов как например, сети ДБЛ (длинной базовой линии), при этом достигая точности до сантиметров в пределах большого радиуса.
Понятно, что устройство согласно изобретению работает без направляющих линий.
На фиг. 8 показана возможная конструкция главного модуля 51. Модуль 51 содержит внешний каркас 83 и внутренний каркас (не показан). Внутренний каркас предпочтительно имеет форму цилиндра. Соединяя внешний каркас 83 с внутренним каркасом, можно выполнить очень сильную конструкцию. Сила конструкции необходима, чтобы предотвратить преждевременную усталость в системе.
Модуль 51, например, частично выполнен из стали с высокой прочностью на растяжение и поэтому предназначен для использования в качестве единого компонента первого подъемного троса 42 или второго подъемного троса 45. Это означает, что верхняя сторона модуля 51 будет соединена с первой частью подъемного троса 45, а нижняя сторона модуля 51 будет соединена со второй частью подъемного троса 45, или нижняя сторона модуля 51 будет крепиться непосредственно к грузу. Таким образом, груз на подъемном тросе будет переноситься через модуль 51.
Как было упомянуто выше, модуль 51 снабжен средством 84 для преобразования электрической энергии, подаваемой через составной шланг 46, в гидравлическую энергию. Эти преобразующие энергию средства 84 содержат двигатель, насос, трубопровод и гидравлический бак. Для связи с оператором на судне модуль 51 также содержит датчики и средства управления. Модуль 51 снабжен соединительной коробкой 85 камера/датчик и распределительной коробкой 86 освещения. Кроме того, модуль 51 содержит источники света 87, датчик креномера 88 бортовой и килевой качки, гироскоп 89 и гидроакустическое оборудование 90.
В модуле 51 также размещены узел Доплера 91, узел Бейти 92 и наклонная панорамирующая камера 93. Снизу модуля закреплен узел подсветки 94, высотомер 95, гидрофон 96 и цветная телекамера с масштабированием 97.
Как указывалось выше, использование гидроакустического оборудования с высокой разрешающей способностью вместе с дистанционным лагом важно для достижения необходимой точности, как только груз достиг заданной глубины. Гидроакустическое оборудование будет использоваться для определения положения относительно по меньшей мере одного объекта, установленного на дне моря. Используя дистанционный лаг, затем возможно дистанцировать действия позиционирования от поверхностной опоры, а также от любых других акустических средств повторителей сигналов, как например сети ДВА (длинной базовой линии), причем при этом достигается точность до сантиметров в пределах большого радиуса.
Посредством модуля 51 можно манипулировать положением груза. Так как вес якорной цепи 42 будет приниматься первым подъемным средством 41, и только относительно небольшой вес будет нести дополнительный подъемный трос 45, свобода движения модуля 51 относительно большая. Это означает, что несмотря на огромный вес якорной цепи 42 и груза 43, груз 43 может быть очень точно установлен в месте назначения.
Чертежи 9 и 10 поясняют, что система может использоваться либо с кранового судна, либо с буксировщика для установки якорей, при этом в случае использования опоры буксировщика для установки якорей главный подъемный трос будет использоваться для спуска груза 42 на дно моря, а целью дополнительного троса 45 станет прием некоторых грузов через систему, вследствие чего образуется "прогиб" в главном тросе и обеспечивается радиус диапазона для установки груза в заданном месте, исключительно использованием тяговой мощности системы.
Сочетание дополнительного подъемного троса 45 и модуля 51 позволяет выполнять действия, такие как установка якоря 43, с большой точностью, используя судна гораздо меньших размеров, чем те, которые используются в настоящее время согласно предыдущему уровню техники.
На фиг. 9 якорь 43 показан с якорной цепью 42. Якорная цепь, известная, например, в предыдущем уровне техники, имеет удельный вес, составляющий 250 кг на м. Когда такая цепь опускается на 2000 м, общий вес цепи составляет не менее 500 т. Когда в конце якорной цепи будет закреплен якорь весом, например, 75 тонн, вес самого якоря составляет только небольшую часть общего веса суммы якоря и цепи.
На фиг. 10 преимущества использования модуля 51 как такового показаны еще яснее, например в случае, когда якорь 43 установлен на дне моря. В пространстве, окружающем место назначения, якорная цепь спускается настолько, что якорная цепь 42 лежит на дне моря. Следовательно, якорь 42 будет подниматься с относительно небольшой длиной якорной цепи. С помощью модуля 51 якорь может затем перемещаться в требующееся место. Длина якорной цепи от якоря до дна моря 4, таким образом, определяет радиус действия, в котором может устанавливаться якорь 43.
На фиг. 11 показан пример реализации кранового блока 100, который может использоваться с системой 50 согласно изобретению.
Так как система 50 позволяет точно устанавливать как крановый блок 100, так и груз 43, возможно также с помощью системы поднимать объекты со дна моря. Выше объясняется наличие домкратов 57 и 58. Эти домкраты 57 и 58 с другим крановым блоком 100 могут быть использованы для развертывания и подъема объекта.
Крановый блок 100 снабжен сквозными отверстиями 101 на противоположных сторонах блока 100. Когда крановый блок устанавливается в пазу 54 в устройстве 50, домкраты 57 и 58 могут перемещаться через отверстия 101. Когда объект, например опорная плита 103, обеспечен Т-образным выступом, объект может быть освобожден и поднят движением домкратов 57, 58 через отверстия 101.
На фиг. 12 показан пример реализации модуля 51, предназначенный для использования при развертывании катушки арматуры. Модуль 51 обеспечен шарообразным гидравлическим вращателем 120, соединенным с порталом гидравлического подъемника с домкратами 122. С помощью домкратов 122 можно достигать любого положения на всех плоскостях катушки 123.
Система 50 согласно изобретению также может быть использована для соединения гибкого трубопровода 131 с основанием трубопровода. Чтобы избежать нежелательных напряжений в материале гибкого трубопровода, система может быть снабжена опорным рычагом 130 для придания достаточной жесткости нижней части гибкого трубопровода при его соединении с основанием.
Преимущество системы 50 и способа согласно изобретению заключается в том, что достигается снижение риска, связанного с установкой тяжелых объектов.
Следующим важным преимуществом является то, что требующиеся детали для объектов, которые предварительно конструируются и изготовляются, могут выполняться более точно. Причина этого заключается в более определенном представлении о точности, которая будет достигаться во время установки объектов в нужное место на дне моря.
В описании, приведенном выше, было упомянуто, что настоящее изобретение касается установки объектов на дне моря. Очевидно, что изобретение может быть использовано для подъема или транспортировки объектов со дна моря.
Реферат
Изобретение касается системы направления регулирования и позицирования, используемой во время развертывания и/или подъема объектов или грузов на дне моря на большой глубине. Объект или груз соединен с подъемным средством, таким, как подъемный трос, чтобы дать возможность объекту или грузу опускаться на дно моря с судна. Устройство содержит корпус, имеющий средства для крепления, с возможностью освобождения, объекта или груза к корпусу и средства приведения в движение для перемещения корпуса после погружения. Средства приведения в движение расположены со смещением от средств для крепления, с возможностью освобождения, объекта или груза, для обеспечения стимулирования ротационного управления на подъемном средстве, когда средства приведения в движение находятся в работе. Достигается быстрая и точная установка грузов на морском дне с меньшими затратами, чем с помощью обычных технологий установки. 3 с. и 14 з.п. ф-лы, 14 ил.
Комментарии