Уборочное устройство, соответствующие машина и способ - RU2769351C2
Код документа: RU2769351C2
Чертежи
Описание
Изобретение относится к уборочному устройству для уборки корнеплодов, в частности, свеклы, содержащему опору, определяющую положение выкапывания уборочного устройства, и секцию выкапывания, включающую в себя по меньшей мере два выкапывающих узла, каждый из которых имеет по меньшей мере один выкапывающий элемент, в частности, представляющий собой пару выкапывающих лемехов, причем каждый выкапывающий узел выполнен с возможностью выкапывания корнеплодов.
Такое уборочное устройство известно из патентного документа US 2017/0105337.
Однако известное уборочное устройство все еще требует дальнейшего совершенствования, чтобы сделать процесс выкапывания более экономичным, в частности, более энергоэффективным и быстрым.
Для решения одной или нескольких из указанных проблем в описанном выше уборочном устройстве согласно изобретению по меньшей мере один из выкапывающих узлов, в частности, каждый выкапывающий узел выполнен с возможностью перемещения относительно опоры между рабочим положением, в котором он способен выкапывать свеклу из-под поверхности поля, и нерабочим положением, в котором выкапывающий узел не способен выкапывать свеклу из указанного поля, когда уборочное устройство находится в положении выкапывания.
Предпочтительные варианты выполнения уборочного устройства согласно изобретению, характеризуются одной или несколькими из следующих особенностей:
– по меньшей мере один из выкапывающих узлов, в частности, каждый выкапывающий узел выполнен с возможностью перемещения между рабочим и нерабочим положениями независимо от положения относительно опоры всех других выкапывающих узлов;
– уборочное устройство определяет плоскость уборки, при этом смещение конкретного или каждого выкапывающего узла между его рабочим и нерабочим положениями, измеренное перпендикулярно плоскости уборки, составляет по меньшей мере 10 см, в частности, по меньшей мере 15 см, или по меньшей мере 25 см, или по меньшей мере 35 см;
– в нерабочем положении конкретного или каждого из выкапывающих узлов по меньшей мере один выкапывающий элемент расположен с первой стороны плоскости уборки, а в рабочем положении выкапывающего узла по меньшей мере один выкапывающий элемент расположен со второй стороны плоскости уборки, в частности, в нерабочем положении выкапывающий узел расположен на расстоянии от поверхности поля;
– уборочное устройство включает в себя, соединительное средство, предпочтительно содержащее соединительные тяги и оси и соединяющее по меньшей мере один из выкапывающих узлов с опорой с возможностью его перемещения между рабочим и нерабочим положениями;
– уборочное устройство включает в себя привод, в частности, гидравлический цилиндр, выполненный с возможностью перемещения по меньшей мере одного из выкапывающих узлов между его рабочим и нерабочем положениями независимо от положения относительно опоры всех других выкапывающих узлов;
– уборочное устройство включает в себя средство обнаружения и управления, выполненные с возможностью перемещения конкретного или каждого выкапывающего узла между его рабочим и нерабочим положениями на основе информации, свидетельствующей о наличии или отсутствии подлежащего выкапыванию корнеплода в ряду, обрабатываемом выкапывающим узлом;
– средство обнаружения и управления содержит блок обнаружения, выполненный с возможностью определения для каждого из выкапывающих узлов, должен ли этот выкапывающий узел быть перемещен в его рабочее или нерабочее положение, и блок управления, выполненный с возможностью управления перемещением выкапывающих узлов между их рабочим и нерабочим положениями на основе информации, предоставляемой блоком обнаружения, при этом блок обнаружения включает в себя блок оценки;
– блок обнаружения включает в себя память, содержащую данные о положении конкретного или каждого подлежащего выкапыванию корнеплода на подлежащем обработке поле, и датчик, генерирующий информацию о текущем положении конкретного или каждого выкапывающего узла относительно подлежащего обработке поля, при этом блок оценки выполнен с возможностью управления блоком управления на основе информации из памяти и информации от датчика так, чтобы перемещать выкапывающий узел в его рабочее положение, когда он находится в поле перед подлежащим выкапыванию корнеплодом, и перемещать выкапывающий узел в его нерабочее положение, когда он находится в поле перед участком, не содержащим подлежащих выкапыванию корнеплодов; и/или
– блок обнаружения включает в себя для конкретного или каждого выкапывающего узла датчик, выполненный с возможностью обнаружения наличия или отсутствия подлежащего выкапыванию корнеплода перед устройством уборки корнеплодов и соединенный с блоком оценки, при этом блок оценки выполнен с возможностью управления перемещением конкретного или каждого выкапывающего узла в его соответствующее рабочее или нерабочее положения на основе обнаружения наличия или отсутствия корнеплода.
Объектом изобретения также является машина для уборки корнеплодов, в частности свеклы, включающая в себя узел отрезания головок корнеплодов, выполненный с возможностью отрезания головок подлежащих выкапыванию корнеплодов, и уборочное устройство для уборки корнеплодов, головки которых отрезаны узлом отрезания, при этом устройство для уборки корнеплодов представляет собой описанное выше устройство.
Еще одним объектом изобретения является способ уборки корнеплодов посредством использования описанных выше устройства или машины, включающий в себя этапы, на которых определяют для конкретного или каждого выкапывающего узла, находится ли подлежащий выкапыванию корнеплод в почве в пределах заданного расстояния от этого выкапывающего узла в направлении перемещения уборочного устройства, перемещают выкапывающий узел в его рабочее положение в случае, если подлежащий выкапыванию корнеплод находится в пределах заданного расстояния, и выкапывают корнеплод посредством выкапывающего узла.
Способ уборки корнеплодов может включать в себя один или несколько следующих этапов, на которых:
– для конкретного или каждого выкапывающего узла определяют, содержит ли обрабатываемый в настоящее время ряд корнеплодов еще не выкопанные корнеплоды, и, если обрабатываемый в настоящее время ряд корнеплодов больше не содержит не выкопанных корнеплодов, переводят выкапывающий элемент в его нерабочее положение;
– выполняют способ после поворота уборочного устройства в конце ряда, и, в частности, перед началом подлежащего выкапыванию ряда.
Изобретение станет более понятным из последующего описания со ссылками на чертежи.
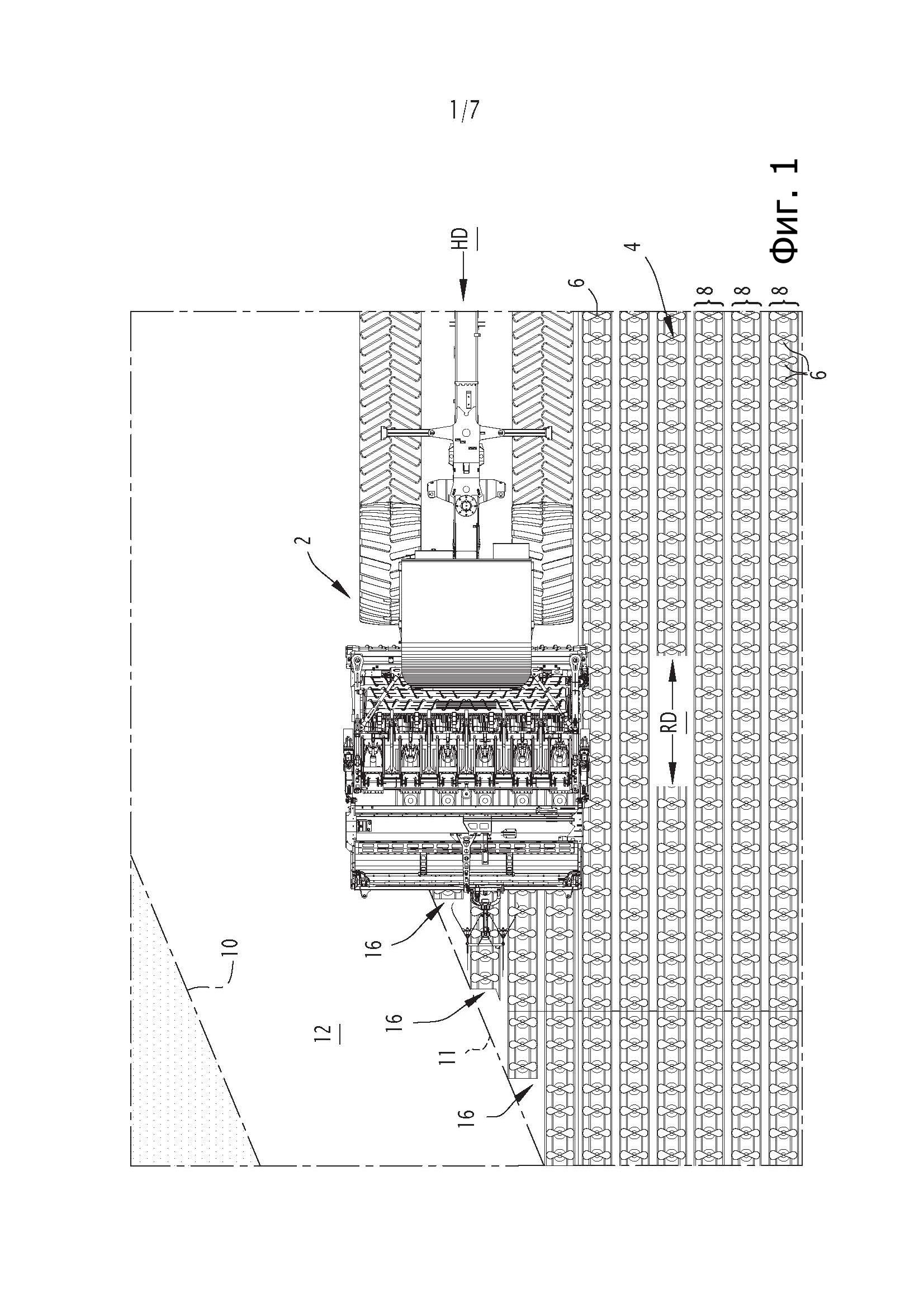
На фиг. 1 схематично показано подлежащее обработке поле и транспортное средство, оснащенное уборочным устройством согласно изобретению и обрабатывающее конец поворотной полосы;
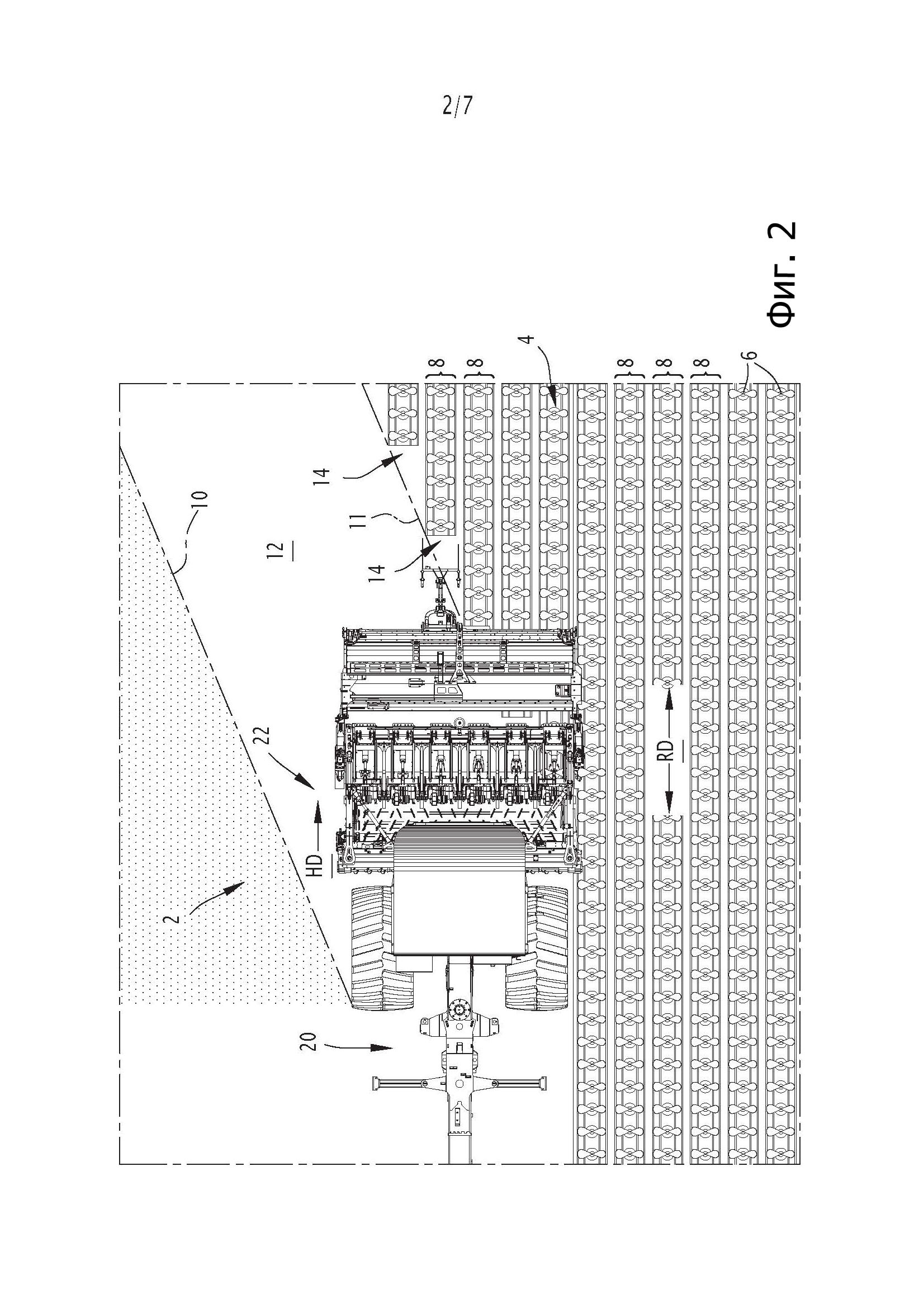
на фиг. 2 – подлежащее обработке поле, аналогичное полю по фиг. 1, но с транспортным средством, обрабатывающим начало поворотной полосы;
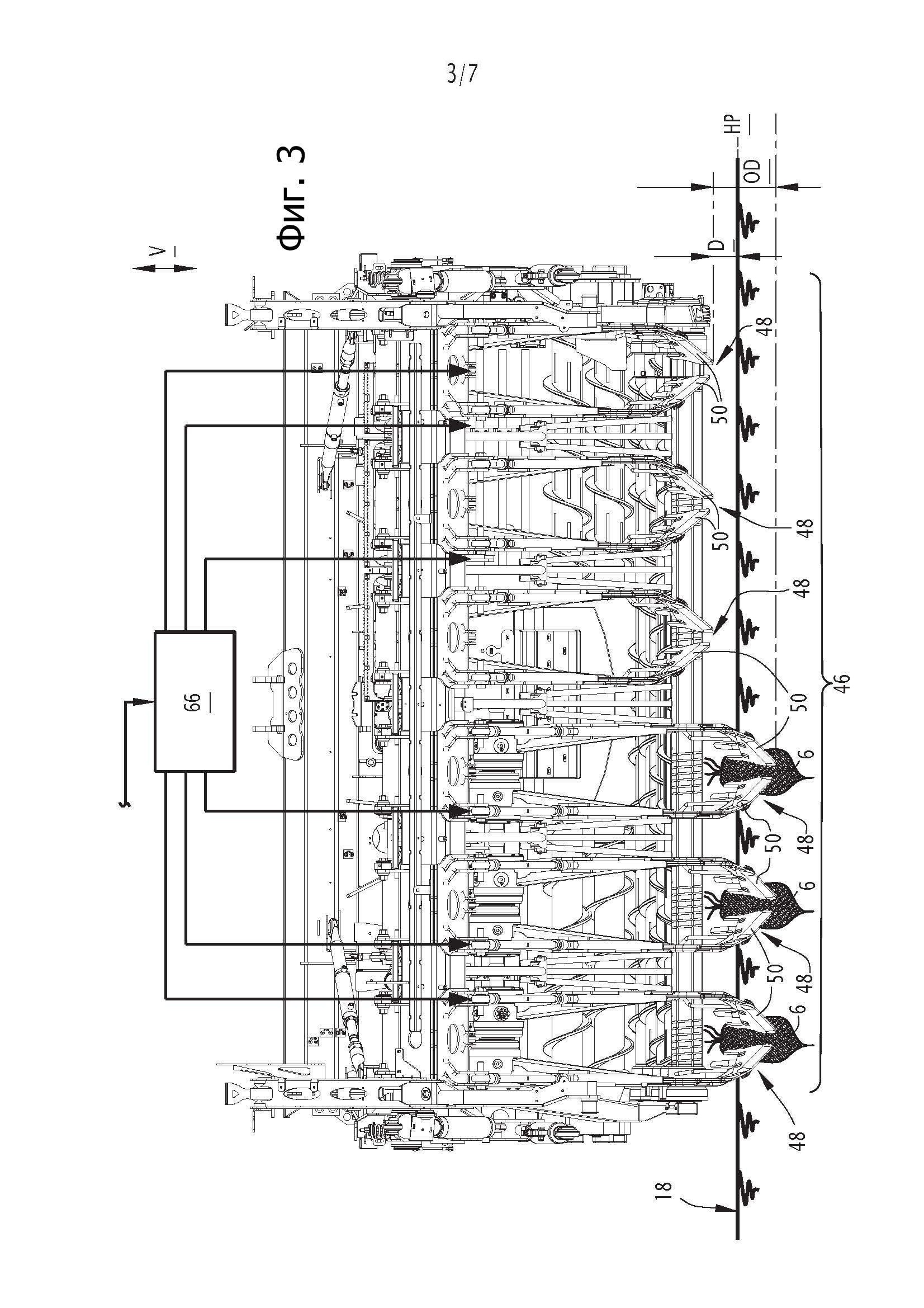
на фиг. 3 – часть уборочного устройства во время обработки поля, вид в направлении, параллельном направлению перемещения при уборке;
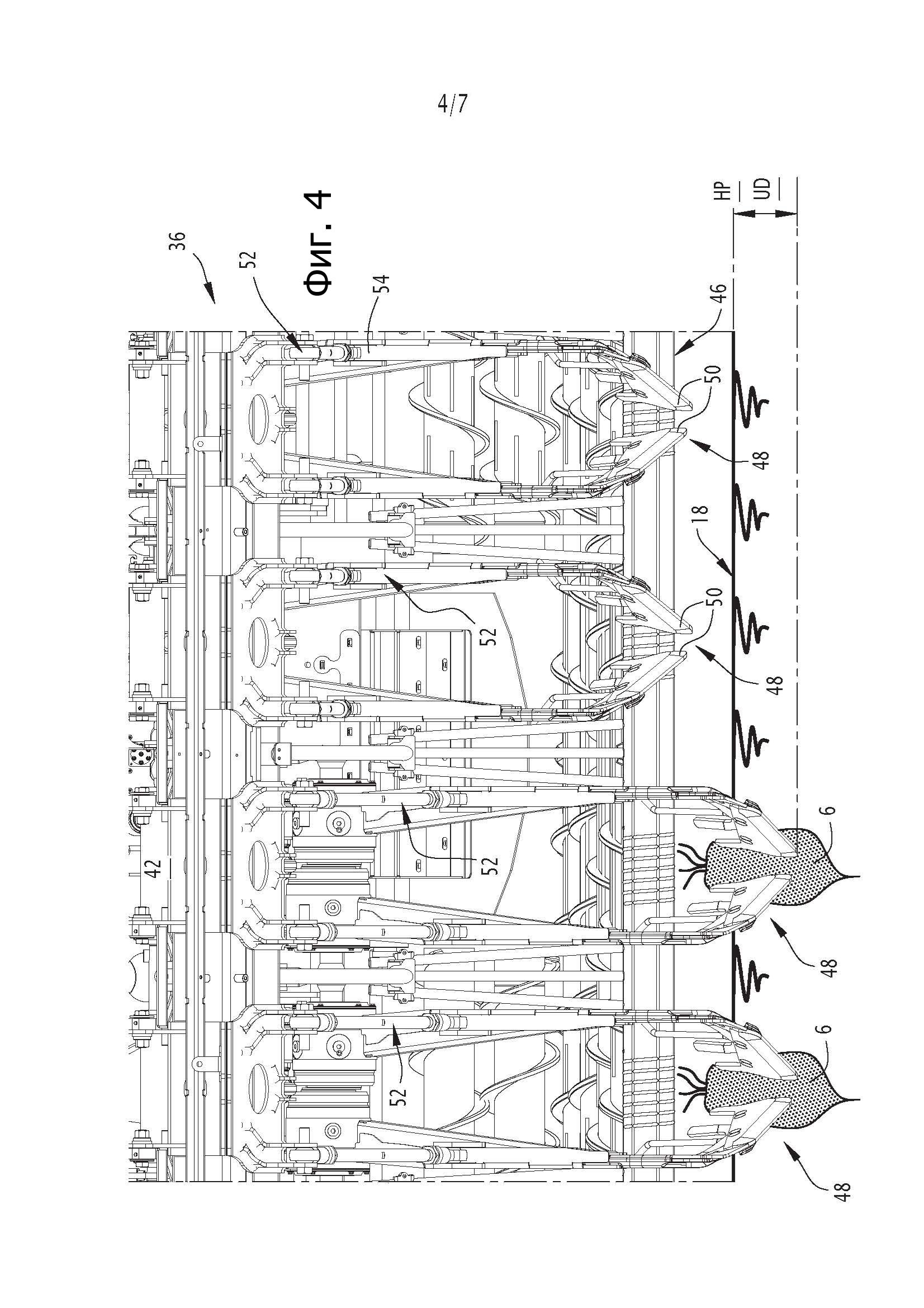
на фиг. 4 – часть уборочного устройства, показанная на фиг. 3, вид в увеличенном масштабе;
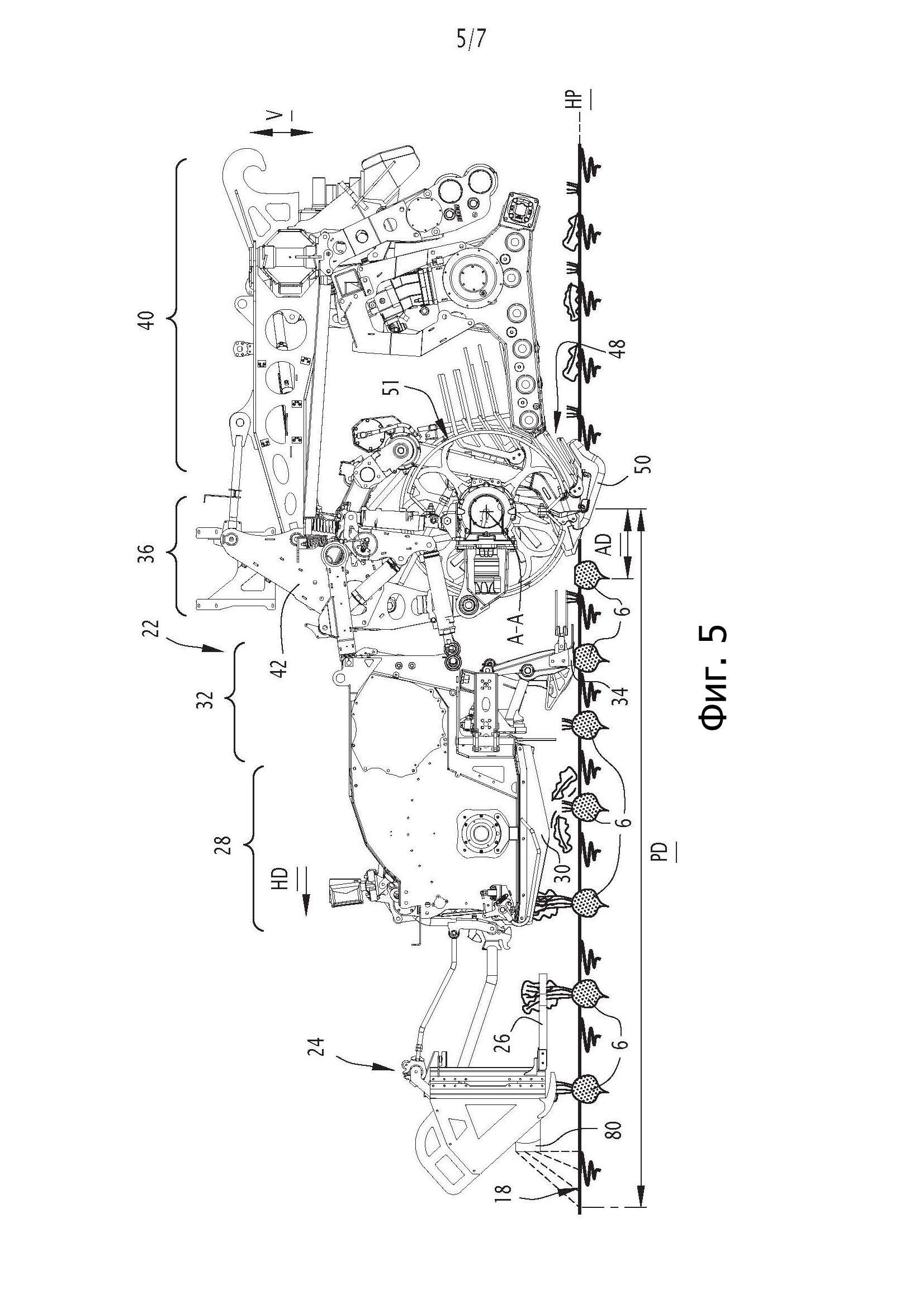
на фиг. 5 – уборочное устройство согласно изобретению во время обработки поля, вид сбоку;
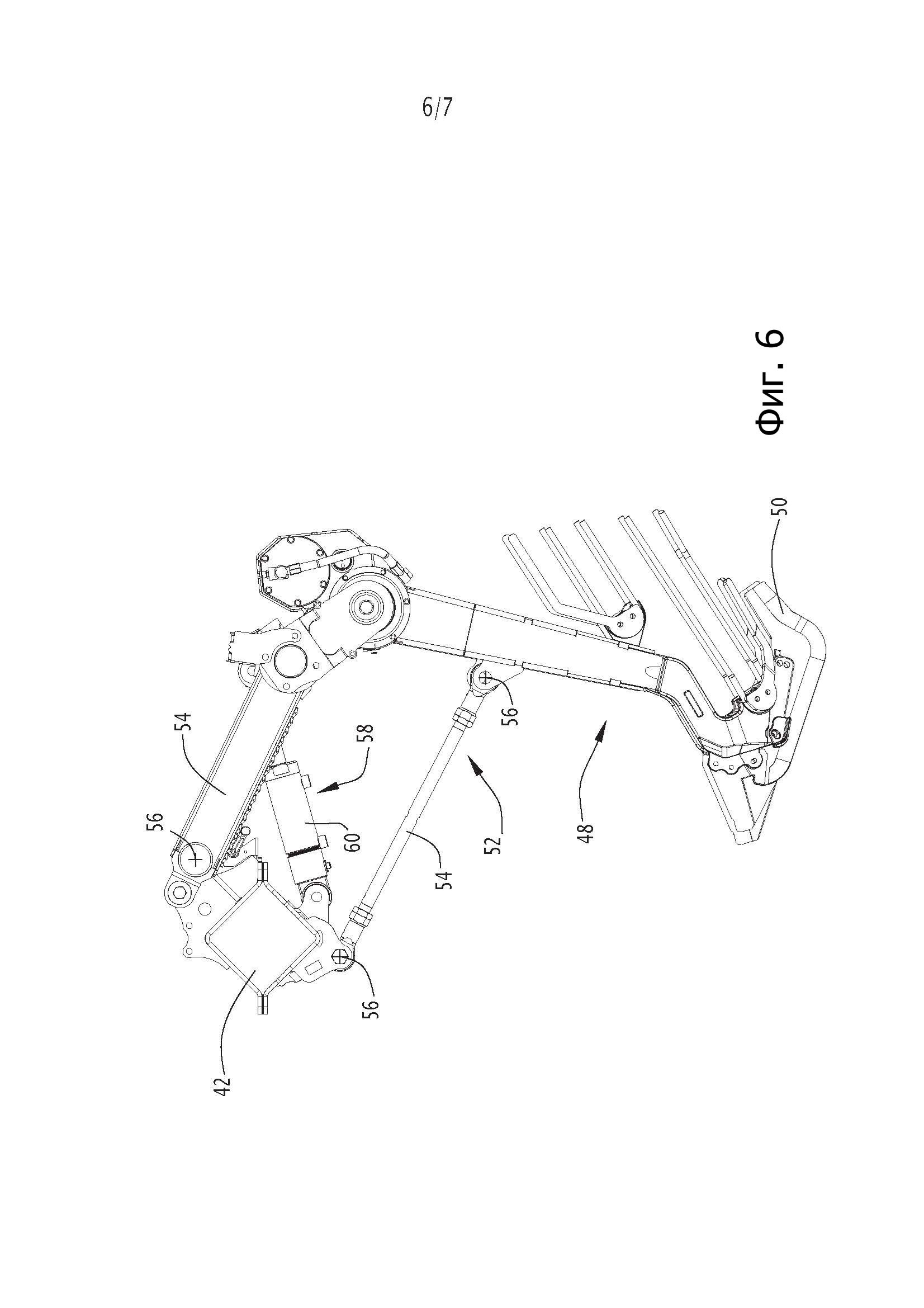
на фиг. 6 – выкапывающий узел уборочного устройства согласно изобретению, вид сбоку;
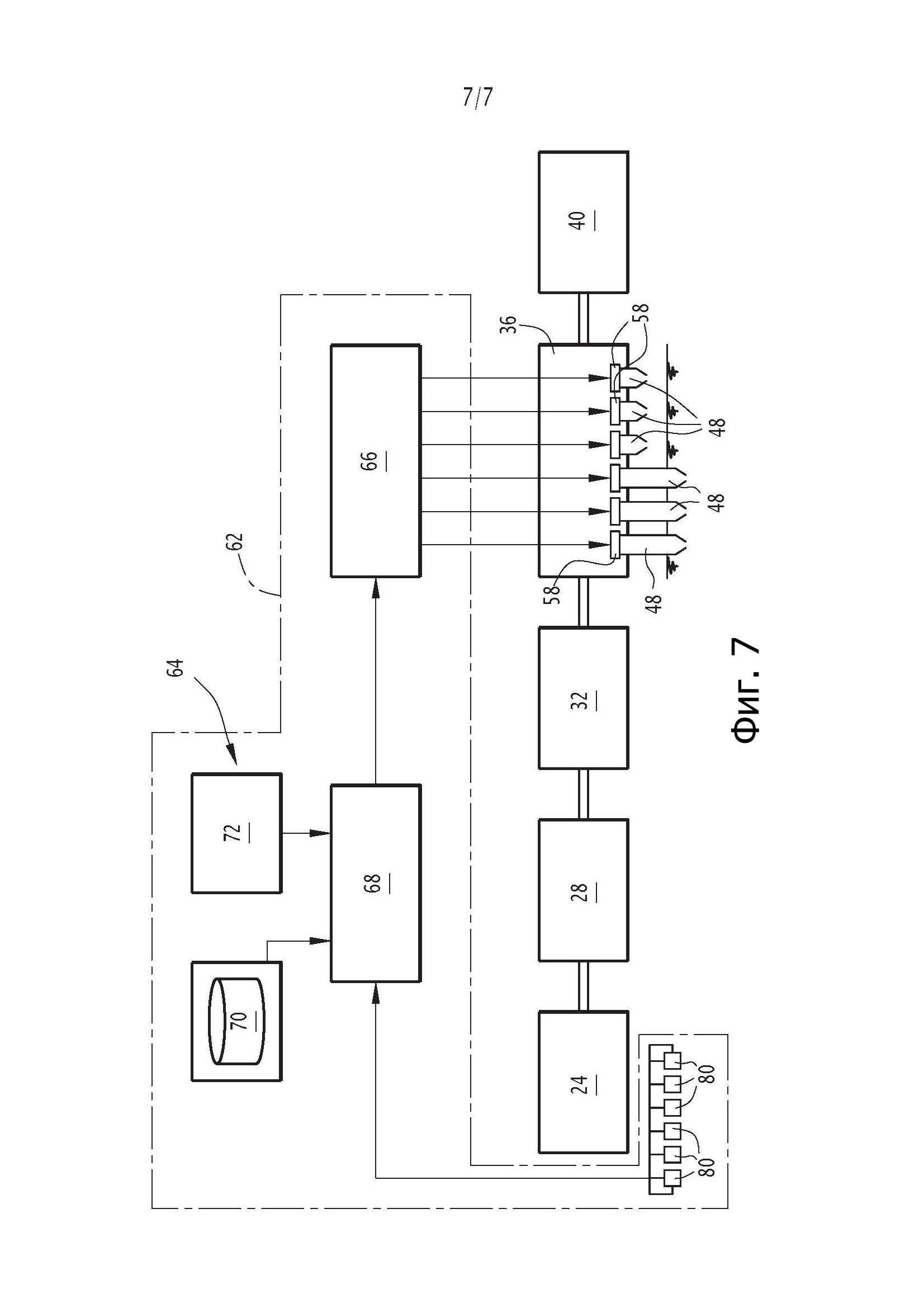
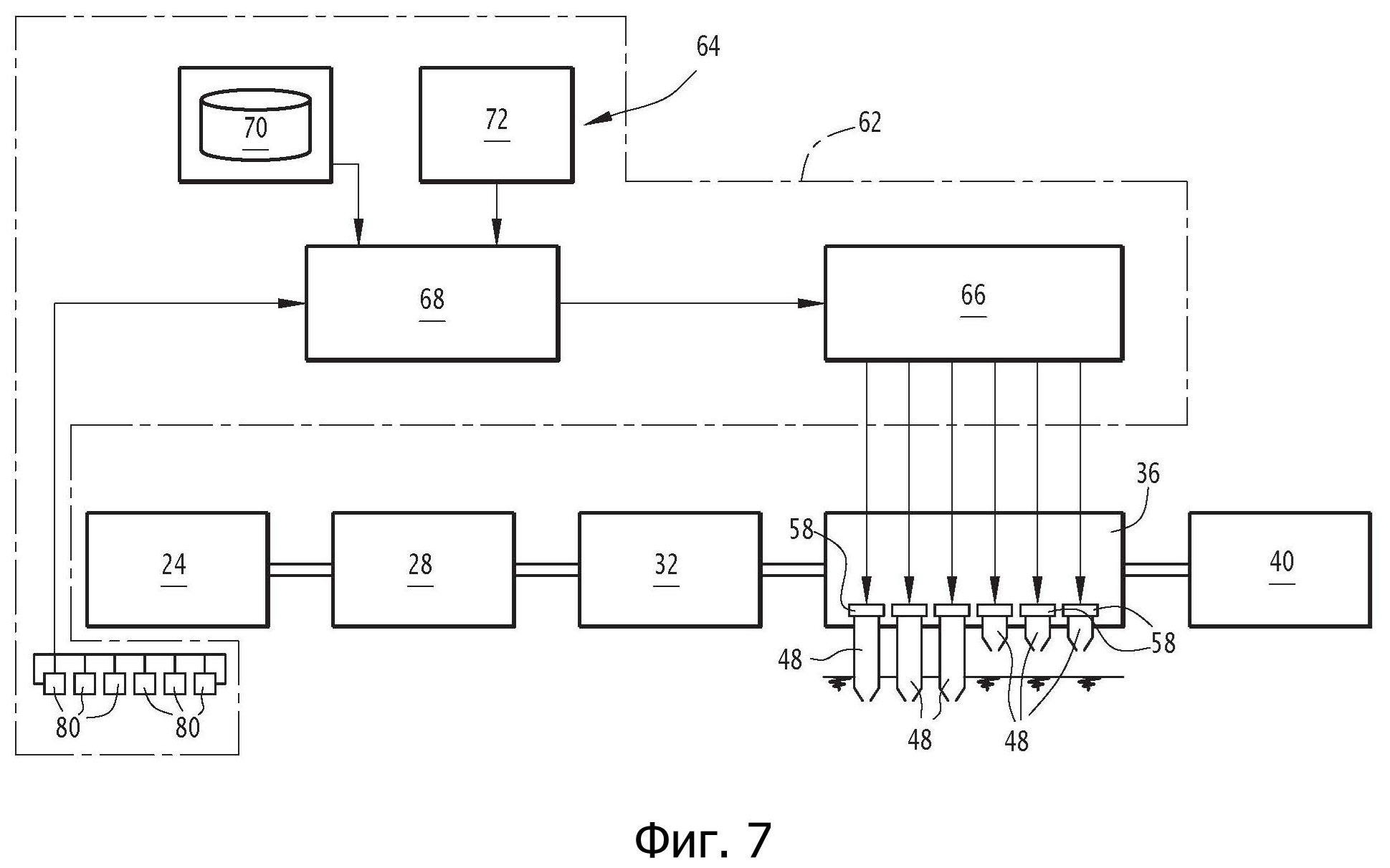
на фиг. 7 – блок-схема уборочного устройства согласно изобретению.
На фиг. 1 схематично показано подлежащее обработке поле и уборочное транспортное средство согласно изобретению, в целом обозначенное позицией 2. Подлежащее обработке поле представляет собой сельскохозяйственное поле 4 и содержит корнеплоды 6, такие как свекла, в частности, сахарная. Корнеплоды 6 расположены рядами 8, которые, как правило, параллельны друг другу и проходят вдоль направления RD ряда. У сельскохозяйственного поля 4 есть край 10, который, как правило, расположен под углом к направлению RD ряда и границы 11 посадки, которая может быть, как правило, параллельной краю 10 поля. Край 10 поля и граница 11 посадки ограничивают поворотную полосу 12, в которой корнеплоды уже собраны или в которой не производилась посадка корнеплодов. Поворотная полоса может быть, например, частью убранного поля, луга, пастбища или улицы.
У каждого ряда 8 есть начало 14 (фиг. 2), и конец 16 (фиг. 1). Начала 14 и концы 16 смежных рядов 8 в зоне поворотной полосы 12 смещены один относительно другого в направлении RD. Начала 14 и концы 16 рядов в зоне поворотной полосы 12 определяют и, как правило, совпадают с границей 11 поля. В центральной части сельскохозяйственного поля 4 начала 14 и/или концы 16 смежных рядов 8 могут быть выровнены один с другим в направлении RD рядов.
Сельскохозяйственное поле 4 также определяет поверхность 18 поля, которая, как правило, параллельна плоскости фиг. 1 и 2.
Уборочное транспортное средство 2 включает в себя транспортное средство 20 и машину 22 для уборки корнеплодов.
Как показано на фиг. 5, машина 22 для уборки корнеплодов включает в себя узел 24 обнаружения листвы с датчиком 26 листвы, узел 28 отрезания листвы с отрезающими листья ножами 30, узел 32 отрезания головок корнеплодов, содержащий нож 34 для отрезания головок корнеплодов, уборочное устройство 36 для уборки корнеплодов и узел 40 очистки и погрузки, выполненный с возможностью очистки корнеплодов 6, убранных уборочным устройством 36.
Уборочное устройство 36 и в целом уборочное транспортное средство 2, определяет направление HD перемещения при уборке, которое соответствует направлению перемещения уборочного транспортного средства 2 во время выкапывания корнеплодов. Уборочное устройство 36, и в целом уборочное транспортное средство 2, определяет плоскость HP уборки, которая во время операции выкапывания представляет собой плоскость, как правило, параллельную поверхности 18 поля и параллельную направлению HD перемещения при уборке. Плоскость HP уборки представляет собой номинальную плоскость, в которой расположена поверхность 18 поля и относительно которой сконструированы и размещены выкапывающие узлы 48 и остальные компоненты уборочного транспортного средства 2. На чертежах плоскость HP уборки совпадает с поверхностью 18 поля.
Уборочное устройство 36 включает в себя опору 42, которая представляет собой, например, раму, и которая определяет положение выкапывания этого уборочного устройства 36. Положение выкапывания уборочного устройства 36 представляет собой положение, в котором опора 42 находится относительно транспортного средства 20 или относительно сельскохозяйственного поля 4, в частности, относительно поверхности 18 поля во время выкапывания корнеплодов 6, т.е. во время извлечения одного или нескольких корнеплодов 6 из почвы поля.
Уборочное устройство 36 также включает в себя секцию 46 выкапывания, содержащую по меньшей мере два выкапывающих узла 48. В этом случае уборочное устройство 36 или секция 46 выкапывания включает в себя шесть выкапывающих узлов 48, расположенных рядом друг с другом.
Каждый выкапывающий узел 48 включает в себя пару выкапывающих лемехов 50. Каждый выкапывающий узел 48 выполнен с возможностью выкапывания корнеплодов 6 путем заглубления в сельскохозяйственное поле 4 на заданную глубину UD выкапывания (фиг. 4), которая может зависеть от типа корнеплодов 6 и геометрии выкапывающих лемехов 50 (фиг. 3). Для выкапывания выкапывающий узел 48 заглубляется в сельскохозяйственное поле 4 на глубину UD выкапывания и перемещается в направлении HD уборки. Другими словами, глубина UD выкапывания представляет собой расстояние нижнего конца (т.е. точки выкапывающего лемеха, наиболее удаленной от плоскости HD уборки) выкапывающих лемехов 50 (или в целом выкапывающих элементов) до плоскости HD уборки. Глубина UD выкапывания составляет, например, по меньшей мере 5 см, по меньшей мере 15 см или по меньшей мере 30 см. Глубина выкапывания может также составлять самое большее 45 см.
По меньшей мере один из выкапывающих узлов 48, и, в частности и предпочтительно, каждый из выкапывающих узлов 48 выполнен с возможностью перемещения относительно опоры 42 между рабочим положением, в котором выкапывающий узел 48 способен выкапывать корнеплод 6 из поля 4, когда уборочное устройство 36 находится в положении выкапывания, и нерабочим положением, в котором выкапывающий узел 48 неспособен выкапывать корнеплоды из поля, когда уборочное устройство 36 находится в положении выкапывания.
Показанные на фиг. 3 три крайних левых выкапывающих узла 48 находятся в их рабочих положениях, а три крайних правых выкапывающих узла 48 находятся в их нерабочих положениях. Как показано, в нерабочем положении выкапывающий узел 48 входит в контакт с корнеплодом 6 из ряда 8, обрабатываемого соответствующим выкапывающим узлом 48, и заглублен в почву. В нерабочем положении выкапывающий узел 48 извлечен и, как правило, расположен на расстоянии D, измеренном перпендикулярно плоскости HP уборки относительно поверхности 18 поля или плоскости HP уборки. В этом положении выкапывающий узел 48 не имеет контакта с сельскохозяйственным полем 4. Точнее говоря, расстояние D измеряется от нижнего конца (т.е. точки выкапывающего лемеха, наиболее близкой к плоскости уборки) выкапывающих лемехов 50 до плоскости HP уборки. Расстояние D, как правило, больше 0 и предпочтительно больше 6 см, предпочтительнее больше 8 см или не менее 10 см.
Расстояние D, как правило, меньше 16 см, предпочтительно меньше 14 см и предпочтительнее не более 12 см.
Выкапывающий узел 48 в его нерабочем положении смещен на расстояние OD относительно рабочего положения вдоль вертикального направления V или вдоль направления, перпендикулярного плоскости HP уборки. Величина смещения выкапывающего узла 48 между его рабочим положением и его нерабочем положением, измеренного перпендикулярно плоскости HP уборки, как правило, составляет по меньшей мере 10 см, в частности 15 см, и может составлять по меньшей мере 25 см или по меньшей мере 35 см.
Когда выкапывающий узел 48 находится в нерабочем положении, выкапывающие элементы в рассматриваемом варианте выполнения выкапывающих лемехов 50 располагаются с первой стороны плоскости (HP) уборки, а когда узел 48 выкапывания находится в рабочем положении выкапывающие элементы располагаются со второй стороны, противоположной первой стороне, плоскости (HP) уборки.
В качестве альтернативы, когда узел 48 выкапывания находится в нерабочем положении, выкапывающие элементы 50 располагаются со второй стороны плоскости (HP) уборки. В этом случае выкапывающие элементы 50 в нерабочем положении все еще находятся в поле (т.е. ниже поверхности поля), но требуют меньшего усилия для перемещения, и имеют меньший износ. В этом случае расстояние OD смещения меньше расстояния UD выкапывания.
По меньшей мере один из выкапывающих узлов 48 выполнен с возможностью перемещения между его рабочим и нерабочим положениями независимо от положения относительно опоры 42 или относительно всех других выкапывающих узлов 48. В рассматриваемом примере каждый и все выкапывающие узлы 48 выполнены с возможностью перемещения между их рабочим и нерабочим положениями независимо от положения относительно опоры 42 или относительно всех других выкапывающих узлов 48. Таким образом, в любой заданный момент времени обработки поля только выкапывающие узлы 48, которые не требуются для выкапывания корнеплодов из поля, могут находиться и переводятся в их нерабочее положение, в то время как все выкапывающие узлы 48, которые необходимы для выкапывания корнеплодов 6, могут быть оставлены заглубленными в почву.
Это позволяет обеспечить низкое потребление энергии для данной скорости выкапывания, поскольку выкапывающие узлы 48 в их нерабочем положении не создают сопротивления, которое должна преодолеваться транспортным средством 2. Кроме того, выкапывающие узлы в их нерабочем положении не подвергаются износу вследствие воздействия почвы, и операция по уборке урожая ускоряется и становится более экономичной, поскольку сокращается время простоя из-за износившихся выкапывающих узлов.
Уборочное устройство 36 также включает в себя по меньшей мере одно, в частности, два направляющих колеса 51 с осью вращения A-A, перпендикулярной направлению HD перемещения при уборке. Во время выкапывания ось вращения A-A, как правило, горизонтальна. Направляющие колеса 51 расположены с каждой боковой стороны уборочного устройства 36. Плоскость HP уборки проходит по касательной к окружности опорного колеса (колес). Плоскость HP уборки является, как правило, номинальной поверхностью поля, относительно которой рассчитывается положение выкапывающих узлов 48.
Чтобы сделать выкапывающие узлы 48 подвижными относительно опоры 42, уборочное устройство 36 включает в себя для каждого выкапывающего узла 48 соединительное средство 52, связывающее соответствующий выкапывающий узел 48 с опорой 42 с возможностью перемещения между рабочим и нерабочим положениями (фиг. 6).
Соединительное средство 52 включает в себя, например, комплект соединительных штанг 54, соединенных одним концом с опорой 42, а другим концом – с выкапывающим узлом 48 посредством шарниров 56.
Каждый выкапывающий узел 48 уборочного устройства 36 включает в себя привод 58, выполненный с возможностью перемещения этого выкапывающего узла 48 между его рабочим и нерабочим положениями независимо от положения относительно опоры 42 всех других выкапывающих узлов 48. Если не все выкапывающие узлы 48 выполнены с возможностью индивидуального перемещения между рабочим и нерабочим положениями, привод имеется только у подвижных узлов выкапывания.
Привод 58 (фиг. 6) представляет собой, например, гидравлический цилиндр 60. Один конец гидравлического цилиндра 60 присоединен к опоре 42, а другой конец – к выкапывающему узлу 48 или к соединительному средству 52, так что выдвижение и/или втягивание гидравлического цилиндра перемещает выкапывающий узел 48 между его рабочим и нерабочим положениями.
Уборочное устройство 36 также включает в себя средство 62 управления, выполненное с возможностью перемещения конкретного или каждого выкапывающего узла 48 между его рабочим и нерабочим положениями, исходя из информации, свидетельствующей о наличии или отсутствии подлежащих выкапыванию корнеплодов в ряду 8, обрабатываемом выкапывающим узлом 48. Средство 62 управления включает в себя блок 64 обнаружения, выполненный с возможностью определения для конкретного или каждого выкапывающего узла 48, находится ли подлежащий выкапыванию корнеплод в почве ряда 8, в настоящее время обрабатываемого соответствующим выкапывающим узлом 48, или находится ли подлежащий выкапыванию корнеплод 6 в почве в пределах заданного расстояния PD от выкапывающего узла 48 в направлении HD перемещения уборочного устройства во время уборки.
Средство управления также включает в себя блок 66 управления, выполненный с возможностью приведения в движение привода 58 каждого выкапывающего узла 48 на основе информации от блока 64 обнаружения.
Блок 64 обнаружения включает в себя блок 68 оценки и память 70, содержащую данные о положении на обрабатываемом поле конкретного или каждого подлежащего выкапыванию корнеплода 6, а также датчик 72, генерирующий информацию о текущем положении конкретного или каждого выкапывающего узла 48 относительно обрабатываемого поля.
Данные, характеризующие положение конкретного или каждого подлежащего выкапыванию корнеплода 6 в подлежащем обработке поле, могут, например, вытекать из данных, сформированных во время посадки корнеплодов 6, если устройство посадки корнеплодов оснащено устройством, выполненным с возможностью определения и хранения местоположения каждого посаженного корнеплода 6. Данные, характеризующие положение конкретного или каждого подлежащего выкапыванию корнеплода 6 в подлежащем обработке поле, могут также поступать от средства определения местоположения корнеплодов, включающего в себя средство распознавания изображения, выполненное с возможностью извлечения данных о местоположении из изображения подлежащего обработке поля.
Датчик 72, включает в себя, например, приемник GPS или другое устройство определения местоположения и направления и память, содержащую информацию о геометрии машины 22 для уборки корнеплодов и положении выкапывающих узлов относительно опорной точки GPS или другого устройства определения местоположения и направления.
Блок 68 оценки выполнен с возможностью управления блоком 66 управления на основе информации из памяти 70 и на основе информации от датчика 72, чтобы перемещать один или каждый выкапывающий узел 48 в его рабочее положение, когда этот выкапывающий узел 48 находится в поле 4 перед подлежащим выкапыванию корнеплодом 6 в направлении HD перемещения во время уборки и предпочтительно на расстоянии, большем или равном расстоянию AD активации (фиг. 5), которое является расстоянием, которое машина 22 уборки корнеплодов проходит за время, требуемое выкапывающему узлу 48 для занятия своего рабочего положения из нерабочего положения. Расстояние AD активации зависит от скорости перемещения или выкапывания уборочного транспортного средства 2 и скорости, с которой выкапывающий узел 48 переводится из нерабочего положения в рабочее положение. Расстояние AD активации составляет, например, от 10 см до 50 см.
Блок 68 оценки выполнен также с возможностью управления блоком 66 управления, чтобы перемещать один или каждый выкапывающий узел 48 в нерабочее положение, когда выкапывающий узел 48 находится на подлежащем обработке поле в направлении уборки перед участком без подлежащих выкапыванию корнеплодов 6, и это в пределах заданного минимального свободного расстояния, которое по меньшей мере в два раза больше расстояния AD активации.
Дополнительно или в качестве альтернативы, блок 64 обнаружения может, кроме памяти 70 и датчика 72, включать в себя для конкретного или каждого выкапывающего узла 48 датчик 80, прикрепленный к части выкапывающего устройства 36, в частности, к опоре 42, и, в частности, к узлу 28 отрезания листьев или к узлу 24 обнаружения листвы. Каждый датчик 80 выполнен с возможностью обнаружения наличия или отсутствия перед машиной 22 подлежащих выкапыванию корнеплодов 6 и связан с блоком 68 оценки. Датчик 80 может быть, например, ультразвуковым, лазерным или выполненным в виде видеокамеры, соединенной со средством распознавания изображения. Датчик 80 также может быть механическим, например, датчиком головок корнеплодов узла 32 отрезания головок корнеплодов, предпочтительно прикрепленным к ножу 34 для отрезания головок корнеплодов. Блок 68 оценки выполнен с возможностью управления перемещением выкапывающего узла 48 в его соответствующих рабочем или нерабочем положениях на основе обнаружении наличия или отсутствия корнеплодов 6.
Во время использования уборочного устройства 36 выполняются следующие этапы.
Блок 68 оценки определяет для конкретного или каждого выкапывающего узла 48, находится ли подлежащий выкапыванию корнеплод 6 в почве поля 4 в пределах заданного расстояния PD от выкапывающего узла 48 в направлении HD перемещения уборочного устройства 36 во время уборки. Если подлежащий выкапыванию корнеплод находится в пределах заданного расстояния PD, выкапывающий узел 48 перемещается в рабочее положение, и корнеплод 6 выкапывается выкапывающим узлом.
Заданное расстояние составляет, например, от 30 см до 3 м.
Кроме того, для конкретного или каждого узла 48 выкапывания определяют, содержит ли обрабатываемый в настоящее время выкапывающим узлом 48 ряд 8 корнеплодов еще не выкопанные корнеплоды, и, если обрабатываемый в настоящее время ряд 8 корнеплодов не содержит больше корнеплодов, осуществляется перевод выкапывающего узла в его нерабочее положение. Указанные этапы могут выполняться после поворота уборочной машины в конце ряда и/или перед началом ряда после поворота.
Кроме того, после окончания выкапывания текущего ряда и перед началом выкапывания нового ряда, на основе информации об окончании текущего ряда может осуществляться этап определения начала нового ряда и перевода каждого выкапывающего узла 48 в положение выкапывания на основе информации о текущем ряде.
Реферат
Группа изобретений относится к области сельского хозяйства. Уборочное устройство (36) содержит опору (42), определяющую положение выкапывания уборочного устройства, и секцию (46) выкапывания, содержащую по меньшей мере два выкапывающих узла (48), каждый из которых выполнен с возможностью выкапывания корнеплодов и имеет по меньшей мере один выкапывающий элемент (50). По меньшей мере один из выкапывающих узлов (48) выполнен с возможностью перемещения относительно опоры между рабочим положением, в котором он способен выкапывать свеклу из-под поверхности (18) поля, и нерабочим положением, в котором выкапывающий узел не способен выкапывать свеклу из указанного поля, когда уборочное устройство находится в положении выкапывания. Машина (22) для уборки корнеплодов содержит узел (32) отрезания головок корнеплодов, выполненный с возможностью отрезания головок подлежащих выкапыванию корнеплодов, и уборочное устройство (36) для уборки корнеплодов, головки которых отрезаны узлом отрезания. Устройство для уборки корнеплодов представляет собой вышеописанное устройство (36). Способ уборки корнеплодов посредством использования вышеописанного устройства или вышеописанной машины включает в себя этапы, на которых определяют для конкретного или каждого выкапывающего узла, находится ли подлежащий выкапыванию корнеплод в почве в пределах заданного расстояния от этого выкапывающего узла в направлении перемещения уборочного устройства, выкапывают корнеплод посредством выкапывающего узла. Обеспечивается более экономичный, в частности более энергоэффективный, и быстрый процесс выкапывания. 3 н. и 23 з.п. ф-лы, 7 ил.
Комментарии