Втулка пошагового перемещения для многоступенчатого гидроразрыва за одну спускоподъемную операцию - RU2495994C1
Код документа: RU2495994C1
Чертежи














Описание
Во время гидроразрыва пласта операторы стремятся минимизировать число спуско-подъемных операций, которые необходимо выполнять в скважине, при этом не теряя возможности оптимизировать проведение обработки для интенсификации притока и использование буровой установки/оборудования гидроразрыва. Поэтому, операторы предпочитают использовать систему многоступенчатого гидроразрыва для избирательной обработки для интенсификации притока в несколько стадий в нескольких интервалах или зонах скважины. Обычно, системы гидроразрыва данного типа имеют ряд пакеров для необсаженного ствола скважины, установленных вдоль колонны насосно-компрессорных труб для изоляции зон в скважине. Между данными пакерами в системе вставлены втулки гидроразрыва вдоль колонны насосно-компрессорных труб. Данные втулки вначале закрыты, но их можно открывать для обработки для интенсификации притока различных интервалов в скважине.
Например, систему спускают в скважину и сбрасывают установочный шар для переключения клапана изоляции ствола скважины для надежной отсечки колонны насосно-компрессорных труб. Затем операторы последовательно устанавливают пакеры. Когда все пакеры установлены, клапан изоляции ствола скважины действует как надежный барьер для пластового давления.
Операторы монтируют наземное оборудование гидроразрыва и нагнетают давление для открытия втулки высокого давления на конце колонны насосно-компрессорных труб для обработки первой зоны. С данного момента операторы выполняют последовательную обработку зон со сбросом шаров с последовательно увеличивающимся диаметром в колонну насосно-компрессорных труб. Каждый шар открывает соответствующую втулку для точного проведения гидроразрыва пласта в каждой зоне.
Обычно, сброшенные шары входят в контакт с седлами соответствующего диаметра во втулках гидроразрыва и создают барьеры с находящимися ниже зонами. Приложенный перепад давления в насосно-компрессорной трубе затем сдвигает втулку в открытое положение, так что текучая среда обработки может обрабатывать примыкающую зону для интенсификации притока. Некоторые приводимые в действие шаром втулки гидроразрыва могут механически сдвигаться обратно в закрытое положение. Это дает возможность изоляции проблемных секций, где могут иметь место приток воды или другие нежелательные поступления.
Поскольку зоны обрабатывают ступенчато, шар и седло шара самого малого диаметра используют для самой нижней втулки, и следовательно, находящиеся выше втулки имеют седла большего диаметра для шаров большего диаметра. Вместе с тем, практические ограничения накладывают ограничения на число шаров, которые можно спустить в одну скважину. Поскольку шары должны иметь диаметр, обеспечивающий проход через верхние седла и размещаться только в нужном месте, шары должны иметь достаточную разницу в диаметрах для прохода через верхние седла.
Для преодоления трудностей, связанных с использованием шаров с различными диаметрами, некоторые операторы используют селективные дротики с логической схемой на борту для определения момента достижения нужного седла при сбросе дротиков в скважину. Такой пример раскрыт в патенте США № 7387165. Для вариантов реализации операторы используют “умные” втулки для управления открытием втулок. Такой пример раскрыт в патенте США № 6041857. Хотя такие системы могут являться эффективными, операторам продолжают требоваться новые и полезные способы для селективного открытия скользящих втулок в скважине для гидроразрыва или т.п.
Целью настоящего изобретения является преодоление, или, по меньшей мере, ослабление влияния одной или нескольких проблем, изложенных выше.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Скважинные инструменты подачи текучей среды или скользящие втулки размещают на колонне насосно-компрессорных труб в стволе скважины для проведения гидроразрыва пласта или т.п. работ. Инструменты имеют вставку и втулку с возможностью перемещения в канале инструмента. Различные пробки, такие как шары, дротики гидроразрыва или т.п., сбрасывают в колонну насосно-компрессорной трубы для селективной изоляции различных зон пласта для обработки.
В одном варианте вставка перемещается давлением текучей среды от первого окна в кожухе инструмента. Вставка образует камеру с кожухом инструмента, и первое окно сообщается с данной камерой. Когда первое окно в кожухе инструмента открывается исполнительным механизмом, текучая среда под давлением из кольцевого пространства входит в данное открытое первое окно и заполняет камеру. В свою очередь, вставка перемещается из первого положения во второе положение от втулки действием давления текучей среды.
В другом варианте вставка отклоняется пружиной из первого положения во второе положение. Один или несколько штифтов или рычагов удерживают отклоненную вставку в первом положении. Когда штифты или рычаги перемещаются от вставки исполнительным механизмом, пружина перемещает вставку из первого положения во второе положение от втулки.
Втулка имеет ловитель, который можно использовать для перемещения втулки. Вначале, данный ловитель находится в нерабочем положении, когда вставка установлена по отношению к втулке в первом положении. При перемещении вставки вследствие заполнения камеры или отклонения пружины исполнительным механизмом ловитель переходит в рабочее положение и может захватывать пробку, сброшенную в колонну насосно-компрессорной трубы к ловителю.
В одном варианте ловитель является профилем, выполненным вокруг внутреннего прохода втулки. Вставка вначале закрывает данный профиль до ее перемещения от него исполнительным механизмом. Когда профиль открыт, отклоняющиеся собачки или шпонки на сброшенной пробке могут соединяться с профилем. Затем, с уплотнением пробки во внутреннем проходе втулки, давление текучей среды, закачиваемой в колонну насосно-компрессорной трубы к установленной пробке, перемещает втулку к открытому положению. На данном этапе выпускные окна в кожухе инструмента обеспечивают перемещение текучей среды между каналом инструмента и окружающим кольцевым пространством. Таким способом текучая среда гидроразрыва, закачиваемая в инструмент, может осуществлять обработку для интенсификации притока изолированного интервала пласта ствола скважины.
Обратное устройство ловителя можно также использовать. В таком случае, втулка в инструменте имеет собачки или шпонки, удерживаемые во втянутом положении, когда вставка установлена прижатой к втулке. После перемещения вставки от втулки исполнительным механизмом собачки или шпонки выдвигаются наружу во внутренний проход втулки. Когда пробку затем сбрасывают в колонну насосно-компрессорной трубы, она должна зацепляться с данными выдвинутыми шпонками или собачками, обеспечивая открытие втулки силой приложенного давления текучей среды.
Вне зависимости от формы использованного ловителя втулка пошагового перемещения или инструмент имеет исполнительный механизм для приведения в действие, которым вставка перемещается от втулки так, что следующая сброшенная пробка может быть заловлена. В одном устройстве исполнительный механизм имеет датчик, такой как датчик, основанный на эффекте Холла, и один или несколько изгибающихся элементов или пружин. Когда пробка проходит через инструмент, изгибающиеся элементы вызывают срабатывание датчика для регистрации прохода пробки. Схема управления исполнительного механизма использует счетчик для подсчета числа проходов пробок через инструмент. Когда число достигает заданного значения, схема управления приводит в действие клапан, который может представлять собой электромагнитный клапан или другой механизм. Клапан может иметь плунжер или другое средство закрывания для регулирования перемещения текучей среды для перемещения вставки. Альтернативно, клапан может перемещать штифт или рычаг для освобождения вставки, которая затем перемещается отклонением пружины.
Приведенная выше сущность изобретения не направлена на описание каждого потенциального варианта осуществления или каждого аспекта настоящего изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг.1 показана колонна насосно-компрессорных труб, имеющая втулки пошагового перемещения согласно настоящему изобретению.
На фиг.2 показана втулка пошагового перемещения согласно настоящему изобретению в закрытом положении.
На фиг.3 показана схема части исполнительного механизма или контроллера для втулки пошагового перемещения фиг.2.
На фиг.4 показан дротик гидроразрыва для использования с втулкой пошагового перемещения фиг.2.
На фиг.5A-5B показана другая втулка пошагового перемещения согласно настоящему изобретению в закрытом положении.
На фиг.6 показан дротик гидроразрыва для использования с втулкой пошагового перемещения фиг.5A-5B.
На фиг.7A-7C показана еще одна втулка пошагового перемещения согласно настоящему изобретению в закрытом положении.
На фиг.8A-8F показана втулка пошагового перемещения фиг.7A-7C на различных этапах работы.
На фиг.9A-9B показан другой вариант ловителя для втулки пошагового перемещения настоящего изобретения.
На фиг.10 показан дротик гидроразрыва для устройства ловителя фиг.9A-9B.
На фиг.11A-11D показан еще один вариант ловителя для втулки пошагового перемещения настоящего изобретения.
На фиг.12A-12B показана втулка пошагового перемещения, имеющая вставку, перемещающуюся относительно окон и ловитель в канале.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Колонна 12 насосно-компрессорных труб, показанная на фиг.1, развернута в стволе 10 скважины. Колонна 12 имеет инструменты управления подачей текучей среды или втулки 100A, 100В, 100C пошагового перемещения, расположенные по ее длине. Различные пакеры 40 разделяют участки ствола 10 скважины на изолированные зоны. В общем, ствол 10 скважины может представлять собой необсаженный или обсаженный ствол, и пакеры 40 могут представлять собой пакеры любого подходящего типа, предназначенные для изоляции участков ствола скважины с получением изолированных зон.
Втулки 100A, 100В, 100C пошагового перемещения размещены на колонне 12 насосно-компрессорных труб между пакерами 40 и могут использоваться для подвода текучей среды обработки селективно к изолированным зонам окружающего пласта. Колонна 12 насосно-компрессорных труб может являться частью компоновки гидроразрыва, например, имеющей верхний пакер хвостовика (не показано), клапан изоляции ствола скважины (не показано), и другие пакеры и втулки (не показано) в дополнение к показанным. Если ствол 10 скважины имеет обсадную колонну, тогда ствол 10 скважины может иметь перфорационные каналы 14 в обсадной колонне в различных местах.
Обычно, операторы сбрасывают установочный шар для закрытия клапана изоляции ствола скважины (не показано). Затем операторы монтируют наземное оборудование гидроразрыва и закачивают текучую среду в ствол скважины для открытия приводимой в действие давлением втулки (не показано) на конце колонны 12 насосно-компрессорных труб. При этом обрабатывается первая зона пласта. Затем, на следующем этапе работы операторы селективно приводят в действие втулки 100A, 100В, 100C пошагового перемещения между пакерами 40 для обработки изолированных зон, показанных на фиг.1.
Втулки 100A, 100В, 100C пошагового перемещения имеют активируемые ловители (не показано) согласно настоящему изобретению. В зависимости от конкретного числа пробок (т.e., дротиков, шаров или т.п.), сброшенных в колонну 12 насосно-компрессорных труб, внутренние компоненты заданной втулки 100A, 100В, 100C пошагового перемещения приводятся в действие и соединяются со сброшенной пробкой. В таком способе пробку одного определенного диаметра можно сбрасывать в колонну 12 насосно-компрессорных труб для селективного открытия втулки 100A, 100В, 100C пошагового перемещения.
С общим пониманием способа использования втулок 100 пошагового перемещения, рассматриваем детали втулок 100 пошагового перемещения согласно настоящему изобретению. Различные втулки 100 пошагового перемещения описаны в заявке на патент США № 12/753331, включенной в данный документ в виде ссылки.
Одна из таких втулок 100 пошагового перемещения показана на фиг.2. Втулка 100 пошагового перемещения имеет кожух 110, образующий канал 102 со сквозным проходом и имеющий концы 104 и 106 для соединения с колонной насосно-компрессорных труб (не показано). Внутри кожуха 110 размещены две вставки, т.е. вставка 120 и втулка 140, размещенные в его канале 102. Вставка 120 может перемещаться из закрытого положения (фиг.2) в открытое положение (не показано), когда соответствующая пробка (например, дротик 160 фиг.4 или другая пробка) проходит через втулку 100 пошагового перемещения, как рассмотрено более подробно ниже. Аналогично, втулка 140 может перемещаться из закрытого положения (фиг.2) в открытое положение (не показано) когда другая приемлемая пробка (например, дротик 150 или другая пробка) проходит позже через втулку 100 пошагового перемещения, что также рассмотрено более подробно ниже.
Как показано на фиг.2, вставка 120 в закрытом положении перекрывает участок втулки 140. В свою очередь, втулка 140 в закрытом положении перекрывает наружные окна 112 в кожухе 110, и проходящие по окружности уплотнения 142 на втулке 140 предотвращают сообщение текучей среды между каналом 102 и данными окнами 112. Когда вставка 120 находится в открытом положении, вставка 120 перемещается от втулки 140 так, что профиль 146 на втулке 140 становится открытым в канале 102 кожуха. Наконец, втулка 140 в открытом положении перемещается от окна 112 так, что текучая среда в канале 102 может выходить через окно 112 в окружающее кольцевое пространство и обрабатывать примыкающий пласт.
Вначале исполнительный механизм или контроллер 130, имеющий схему 131 управления во втулке 100 пошагового перемещения, программируют для обеспечения прохода установленного числа пробок через втулку 100 пошагового перемещения перед приведением в действие. Затем, втулку 100 пошагового перемещения спускают в скважину в закрытом положении, как показано на фиг.2. Для начала гидроразрыва операторы затем сбрасывают пробку в колонну насосно-компрессорных труб с поверхности. Данная пробка может быть предназначена для закрытия клапана изоляции ствола скважины или открытия другой втулки пошагового перемещения.
Как показано на фиг.4, одним типом пробки для использования с втулкой пошагового перемещения является дротик 160 гидроразрыва, имеющий наружное уплотнение 162, размещенное по его окружности для соединения с втулкой 140. Дротик 160 также имеет убирающиеся X-образные шпонки 166 или другой тип собачки или шпонки, которые могут втягиваться в дротик 160 и выдвигаться из него. Наконец, дротик 160 имеет сенсорный элемент 164. В одном устройстве данный сенсорный элемент 164 является магнитной полоской или элементом, размещенным внутри или снаружи на дротике 160.
После сброса дротика 160 в колонну насосно-компрессорных труб, дротик 160 через некоторое время достигает втулки 100 пошагового перемещения фиг.2. Поскольку вставка 120 перекрывает профиль 146 во втулке 140, сброшенный дротик 160 не может встать на профиль 146 втулки и вместо этого продолжает проход по большей части втулки 100 пошагового перемещения. В результате, сенсорный элемент 164 дротика 160 встречается с датчиком 134, размещенным в канале 102 кожуха.
Соединенный с источником 132 питания (например, батарея), данный датчик 134 передает электронный сигнал в схему 131 управления, реагируя на проход сенсорного элемента 164. Схема 131 управления может находиться на монтажной плате, размещенной во втулке 100 пошагового перемещения или другом месте. Сигнал показывает момент встречи сенсорного элемента 164 дротика с датчиком 134. Со своей стороны, датчик 134 может являться датчиком, основанным на эффекте Холла, или любым другим датчиком, срабатывающим при магнитном взаимодействии. Альтернативно, датчик 134 может являться некоторым электронным устройством другого типа. Кроме того, датчик 134 может являться механическим или электромеханическим переключателем, хотя электронный датчик является предпочтительным.
Используя сигнал датчика, схема 131 управления подсчитывает, регистрирует или считывает прохождение сенсорного элемента 164 на дротике 160, перемещающемся в колонне насосно-компрессорных труб (не показано). Процесс сброса дротика 160 и регистрации его прохождения датчиком 134 затем повторяется для прохода всех дротиков 160, число которых установлено для втулки 100. Когда число проходящих дротиков 160 становится на единицу меньше установленного для открытия данной втулки 100 пошагового перемещения, схема 131 управления приводит в действие клапан, двигатель или т.п. устройство 136 на инструменте 100, когда данный предпоследний дротик 160 проходит и генерирует сигнал датчика. С приведением в действие клапан 136 перемещает плунжер 138, открывающий окно 118 в кожухе 110. При этом устанавливается сообщение первой герметичной камеры 116a между вставкой 120 и кожухом 110 с окружающим кольцевым пространством, находящимся под более высоким давлением.
Работа исполнительного механизма или контроллера 130 в одном варианте реализации может быть следующей. На фиг.3 показан исполнительный механизм или контроллер 130 для втулки 100 пошагового перемещения с дополнительными подробностями. Датчик 134, такой как датчик, основанный на эффекте Холла, реагирует на сенсорный элемент или магнитную полоску 162 дротика 160 когда она проходит вблизи датчика 134. Реагируя, счетчик 133 являющийся частью схемы 131 управления, учитывает проход элемента 162 дротика. Когда подсчитано заданное число, счетчик 133 приводит в действие переключатель 135, и источник питания 132 приводит в действие электромагнитный клапан 136, перемещающий плунжер 138 для открытия окна 118. Хотя можно использовать электромагнитный клапан 136, можно также использовать любой другой механизм или устройство, выполненное с возможностью удержания окна закрытым до своего приведения в действие. Такое устройство можно приводить в действие электронно или механически. Например, подпружиненный плунжер можно использовать для герметизации окна. Нить или другой разрываемый компонент может удерживать данный отклоненный плунжер в закрытом состоянии для герметизации окна. С приведением в действие, электрический ток, тепло или т.п. могут разрывать нить или другой компонент, обеспечивая открытие плунжером сообщения через окно. Данные и другие типы механизмов клапана можно использовать.
Когда окно 118 на втулке 100 пошагового перемещения фиг.2 открыто, окружающая текучая среда под давлением из кольцевого пространства проходит через окно 118 и заполняет камеру 116a. Смежная камера 116b, созданная между вставкой 120 и кожухом 110, может быть заполнена под атмосферным давлением. Данная камера 116b может легко сжиматься, когда текучая среда под гораздо более высоким давлением из кольцевого пространства, например, при 5000 фунт/дюйм2 (35 МПа) или т.п. входит в первую камеру 116a.
Реагируя на заполнение камеры 116a, вставка 120 срезает срезные штифты 121, соединявшие ее с кожухом 120, освобождаясь от кожуха. Свободная вставка 120 перемещается вниз в канале 102 кожуха поршневым эффектом от заполнения камеры 116a. По завершении перемещения вставки 120, ее дальний конец открывает профиль 146 внутри втулки 140.
Для открытия данной конкретной втулки 100 пошагового перемещения операторы сбрасывают следующий дротик 160 гидроразрыва. Данный следующий дротик 160 достигает открытого профиля 146 на втулке 140 на фиг.2. Отклоняющиеся шпонки 166 на дротике 160 выдвигаются наружу и соединяются с профилем 146 или сцепляются с ним. Шпонка 166 имеет косой паз, стопорящийся на профиле 146 только в первом направлении для открытия втулки 120. Остальная часть шпонки 166 позволяет дротику 160 перемещаться во втором направлении, противоположном первому направлению, так что он может выходить на поверхность, как рассмотрено ниже.
Уплотнение 162 дротика уплотняется во внутреннем проходе или на седле во втулке 140. Поскольку дротик 160 проходит через втулку 140, взаимодействие уплотнения 164 с окружающей втулкой 140 может стремиться замедлить проход дротика. Это помогает сцеплению шпонок 166 с открытым профилем 146.
Операторы нагнетают давление гидроразрыва в колонне насосно-компрессорной трубы, и приложенное давление срезает срезные штифты 141, удерживающие втулку 140 в кожухе 110. Приложенное давление перемещает освободившуюся втулку 140 вниз в кожухе, открывая окна 112. На данном этапе примыкающую зону пласта можно обрабатывать гидроразрывом для интенсификации притока.
Другая втулка 100 пошагового перемещения, показанная на фиг.5A-5B, имеет много одинаковых компонентов с другими втулками, описанными в данном документе, так что одинаковые позиции ссылки использованы для одинаковых компонентов. Втулка 100 пошагового перемещения имеет кожух 110, образующий канал 102 со сквозным проходом, и имеет концы 104 и 106 для соединения с колонной насосно-компрессорных труб (не показано). Внутри, кожух 110 имеет две вставки, т.e. вставку 120 и втулку 140, установленные в его канале 102. Вставка 120 может перемещаться из закрытого положения (фиг.5A) в открытое положение (не показано), когда соответствующая пробка (например, шар, дротик, или пробка другой формы) проходит через втулку 100 пошагового перемещения, как рассмотрено более подробно ниже. Аналогично, втулка 140 может перемещаться из закрытого положения (фиг.5A) в открытое положение (не показано), когда другая приемлемая пробка (например шар, дротик, или пробка другой формы) проходит затем через втулку 100 пошагового перемещения, что также рассмотрено более подробно ниже.
Втулку 100 пошагового перемещения спускают в ствол скважины в закрытом положении. Как показано на фиг.5A, вставка 120 в закрытом положении перекрывает участок втулки 140. В свою очередь, втулка 140 в закрытом положении перекрывает наружные окна 112 в кожухе 110, и проходящие по окружности уплотнения 142 на втулке 140 предотвращают сообщение текучей среды между каналом 102 и данными окнами 112. Когда вставка 120 находится в открытом положении, вставка 120 перемещается от втулки 140 так, что профиль 146 на втулке 140 становится открытым в канале 102 кожуха. Наконец, втулка 140 в открытом положении перемещается от окна 112 так, что текучая среда в канале 102 может выходить через окна 112 в окружающее кольцевое пространство и обрабатывать примыкающий пласт.
Вначале, исполнительный механизм или контроллер 130, имеющий схему 131 управления во втулке 100 пошагового перемещения, программируют для обеспечения прохождения установленного числа пробок через втулку 100 пошагового перемещения перед приведением ее в действие. Затем, втулка 100 пошагового перемещения спускается в скважину в закрытом положении как показано на фиг.5A-5B. Затем для начала гидроразрыва операторы сбрасывают пробки в колонну насосно-компрессорных труб с поверхности.
Как показано на фиг.5A, пробку 170 сбрасывают в колонну насосно-компрессорной трубы, и пробка 170 в итоге достигает втулки 100 пошагового перемещения. Данная пробка 170 показана в виде шара, но может являться пробкой другого типа. Поскольку вставка 120 перекрывает профиль 146 во втулке 140, сброшенная пробка 170 не может встать в профиль 146 втулки и вместо этого продолжает проход через большую часть втулки 100 пошагового перемещения. Затем пробка 170 встречается с одним или несколькими изгибающимися элементами 135, установленными в канале 102 кожуха, как показано на фиг.5B.
Один или несколько изгибающихся элементов 135 могут являться дугообразными пружинами или пластинчатыми пружинами, установленными по окружности периметра внутреннего канала 112. В одном устройстве можно использовать до шести пружин 135. Каждая пружина 135 выполнена с возможностью поглощения части кинетической энергии пробки 170, прокачиваемой через втулку 100 пошагового перемещения. Давление, требуемое для прокачивания пробки 170 через пружины 135 может составлять около 1500 фунт/дюйм2 (10 МПа), что можно контролировать на поверхности во время закачки.
Любое число пружин 135 можно использовать, и пружины могут быть расставлены по окружности канала 102 с одинаковыми интервалами. Отклонение пружин 135 можно выполнять с конфигурацией для конкретного варианта реализации, прогнозируемых давлений, прогнозируемого числа пропускаемых пробок, и других существенных переменных. Пружины 135 являются достаточно прочными для обеспечения индикации на поверхности, но предпочтительно, они не подвержены прихвату вследствие присутствия материалов проппанта, применяемого в гидроразрыве.
Датчик 134 соединен с источником питания, например, батареей, 132. Когда пробка 150 входит в контакт с пружинами 135, прокачивание под давлением пробки 170 во втулке 100 обуславливает изгиб или расширение пробкой 170 пружин 135. При изгибе или расширении пружин вследствие прохождения пробки пружины 135 удлиняются. При полном удлинении, концы пружин 135 входят в контакт с датчиком 134 в канале 102, и приближение конца пружины 135 к датчику 134 указывает на прохождение пробки.
Датчик 134 передает электронный сигнал в схему 131 управления исполнительного механизма или контроллер 130, реагируя на контакт с пружиной. Во втулке пошагового перемещения фиг.5A-5B можно использовать исполнительный механизм 130, аналогичный описанному выше и показанному на фиг.3. Схема 131 управления может находиться на монтажной плате, размещенной во втулке 100 пошагового перемещения или в другом месте. Сигнал указывает на вход пробки 170 в пружины 135 или выход из них. Со своей стороны, датчик 134 может быть датчиком, основанным на эффекте Холла, или любым другим датчиком, срабатывающим при взаимодействии с пружиной 135. Альтернативно, датчик 134 может являться электронным устройством другого типа. Кроме того, датчик 134 может представлять собой некоторую форму механического или электромеханического переключателя, хотя электронный датчик является предпочтительным.
Используя сигнал датчика, схема 131 управления подсчитывает, регистрирует или считывает проходы пробок 170, уходящих вглубь колонны насосно-компрессорных труб (не показано). Сброс пробки 170 и регистрация ее прохождения датчиком 134 затем повторяется для прохода установленного числа пробок 170 через втулку 100. Когда число прошедших пробок 170 становится на единицу меньше установленного для открытия данной втулки 100 пошагового перемещения, схема 131 управления приводит в действие клапан 136 на втулке 100, когда данная предпоследняя пробка 170 проходит и генерирует сигнал датчика.
При приведении в действие клапан 136 перемещает плунжер 138, открывающий окно 118, и при заполнении камеры 116a вставка 120 срезает срезные штифты 121, соединяющие ее с кожухом 120, освобождаясь от кожуха. Свободная вставка 120 перемещается вниз в канале 102 кожуха поршневым эффектом. По завершении перемещения вставки 120, ее дальний конец открывает профиль 146 внутри втулки 140. Теперь для открытия данной конкретно втулки 100 пошагового перемещения, операторы сбрасывают следующую пробку, которая может являться дротиком 180 гидроразрыва, как на фиг.6.
Как показано на фиг.6, пробка, которую можно использовать для пошагового перемещения и открытия втулки, может являться дротиком 180 гидроразрыва. Данный дротик 180 гидроразрыва является одинаковым с описанным выше. Дротик 180 имеет наружное уплотнение 182, размещенное по его окружности для контакта внутри втулки 140. Дротик 180 также имеет убирающиеся X-образные шпонки 186 или собачки или шпонки другого типа, которые могут втягиваться и выдвигаться из дротика 180. В отличие от описанного выше дротика гидроразрыва, в данном дротике 180 гидроразрыва может отсутствовать сенсорный элемент, поскольку взаимодействие дротика 180 гидроразрыва с пружинами 135 на втулке 100 пошагового перемещения указывает на прохождение дротика 180.
На фиг.7A-7C показана другая втулка 100 пошагового перемещения согласно настоящему изобретению в закрытом положении. Втулка 100 пошагового перемещения является аналогичной описанной выше, так что одинаковые позиции ссылки использованы для аналогичных компонентов. Как и в случае, описанном выше, втулка 100 пошагового перемещения спускается в ствол скважины в закрытом положении, и вставка 120 перекрывает участок втулки 140. В свою очередь, втулка 140 перекрывает наружные окна 112 в кожухе 110.
Пробка 170, сброшенная в колонну насосно-компрессорной трубы с поверхности, в результате входит в контакт с пружинами 135, как показано на фиг.7B. Датчик 134 обнаруживает взаимодействие концов изгибающихся элементов или пружин 135, и схема 131 управления исполнительного механизма 130 подсчитывает число проходов пробок 170. Процесс сброса пробки 170 и регистрации ее прохода датчиком 134 повторяется для установленного числа прохода пробок 170, через втулку 100.
Когда число проходов пробок 170 становится на единицу меньше установленного для открытия данной втулки 100 пошагового перемещения, схема 131 управления приводит в действие клапан, двигатель или т.п. устройство 136 на втулке 100, когда данная предпоследняя пробка 170 проходит и генерирует сигнал датчика. После приведения в действие клапан 136 перемещает рычаг или штифт 139, удерживающий вставку 120. Когда вставка 120 больше не удерживается, пружина 135 отводит вставку 120 в канале 102 от втулки 140 для открытия профиля 146 во втулке 140. Дополнительные детали данной операции рассмотрены ниже. Затем, когда дротик гидроразрыва закачивают в скважину, дротик гидроразрыва становится на профиль 146 втулки 140 и можно проводить гидроразрыв.
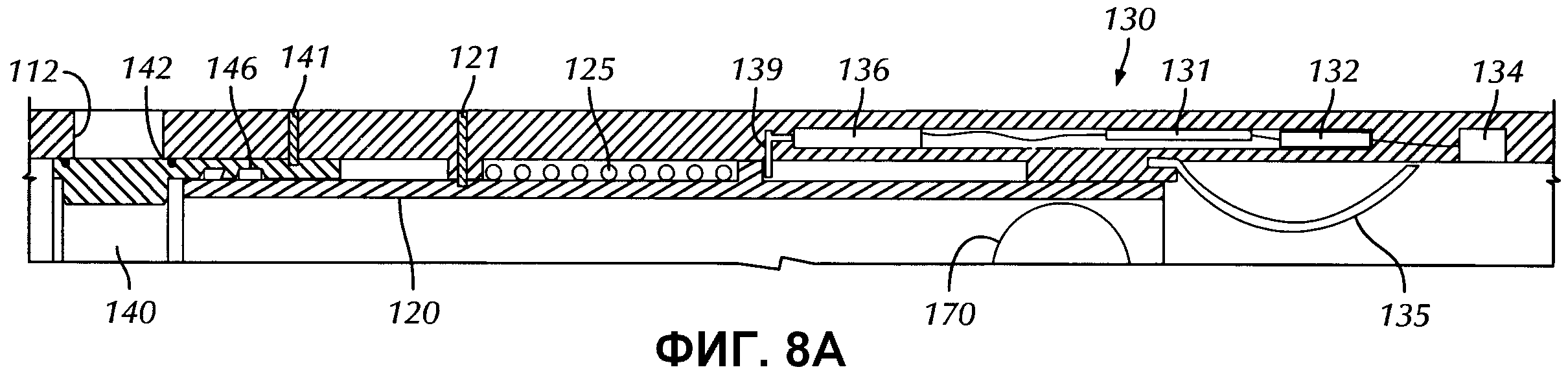
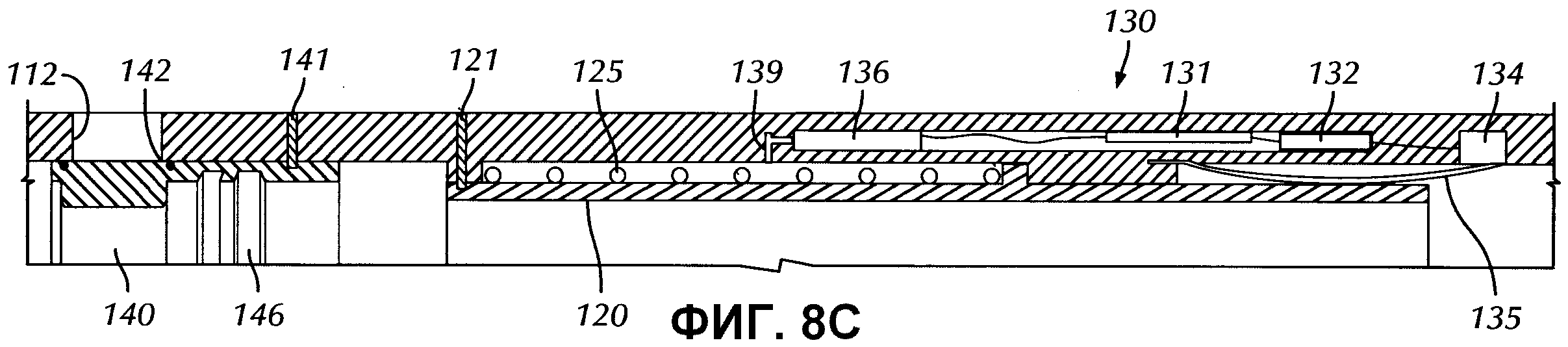
На фиг.8A-8F показана втулка 100 пошагового перемещения фиг.7A-7C на различных этапах работы. Многие из одинаковых этапов работы должны распространяться на другие втулки пошагового перемещения, описанные в данном документе. Как показано на фиг.8A, втулка 100 пошагового перемещения спускается в скважину в закрытом положении с втулкой 140, перекрывающей окно 112 и с вставкой 120, перекрывающей профиль 146 на втулке 140. Сброшенная пробка 170 может проходить через втулку 100 пошагового перемещения.
Как показано на фиг.8B, сброшенная пробка 170 входит в контакт с пружинами 135, и датчик 134 и схема 131 управления обнаруживает и подсчитывает проходы пробок 170. Данный процесс сброса пробки 170 и подсчета повторяется до прохождения установленного числа прохода пробок 170 через втулку 100 пошагового перемещения. На данном этапе, показанном на фиг.8C, схема 131 управления приводит в действие клапан 136, удаляющий удерживающий рычаг или штифт 139 из вставки 120. Освобожденная вставка 120 перемещается отклонением пружины 125 от втулки 140, при этом открывается профиль 146 втулки.
Как показано на фиг.8D, другую пробку затем сбрасывают в насосно-компрессорную трубу. В данном случае пробка является дротиком 180 гидроразрыва, аналогичным описанному выше и показанному на фиг.6. Дротик 180 достигает открытого профиля 146 на втулке 140. Отклоняющиеся шпонки 186 на дротике 180 выдвигаются наружу и соединяются с профилем 146 или ловят его. Шпонки 186 имеют косой паз, закрепляющийся в профиле 146 только в первом направлении для открытия втулки 140. Остальная часть шпонки 186, вместе с тем, обеспечивает перемещение дротика 180 во втором направлении, противоположном первому направлению, так что он может выходить на поверхность, как рассмотрено ниже.
Уплотнение 182 дротика уплотняется во внутреннем проходе или седле во втулке 140. Поскольку дротик 180 проходит через втулку 140, взаимодействие уплотнения 182 с окружающей втулкой 140 может замедлять проход дротика. Это помогает шпонкам 186 ловить открытый профиль 146.
Операторы нагнетают давление гидроразрыва в колонне насосно-компрессорной трубы, и приложенное давление срезает срезные штифты 141, удерживающие втулку 140 в кожухе 140. Освобожденную втулку 140 приложенное давление перемещает вниз в кожухе для открытия окон 112, как показано на фиг.8D. На данном этапе можно осуществлять обработку гидроразрывом для интенсификации притока примыкающей зоны пласта.
После обработки зон для интенсификации притока, операторы открывают скважину для эксплуатации, открывая любой скважинный регулирующий клапан или т.п. Поскольку дротик 180 имеет конкретную относительную плотность (например, около 1,4 или подобную), текучая среда добычи, поднимающаяся по насосно-компрессорной трубе и каналу 102 кожуха, как показано на фиг.8E выносит дротик 180 обратно на поверхность. Если по какой-либо причине дротик 180 не выходит на поверхность, то дротик 180 можно расфрезеровывать. Наконец, как показано на фиг.8F, скважину можно эксплуатировать через открытую втулку 100 без дросселя или геотехнического мероприятия. В любой момент втулку 100 пошагового перемещения можно вручную переустанавливать в закрытое положение с использованием подходящего инструмента.
Как описано выше, для приведения в действие вставки 120 во втулке 100 пошагового перемещения можно использовать ряд устройств. На фиг.5A-5B исполнительный механизм 130 использует поршневой эффект давления при заполнении камеры и перемещает вставку 120. На фиг.7A-7C, исполнительный механизм 130 использует устройство с соленоидом и штифтом, высвобождающее втулку 120 отклоняющуюся пружиной 122. Можно использовать другие способы приведения в действие вставки 120, включающие в себя гидростатические камеры, двигатели и т.п. Кроме того, можно плавить легкоплавкую пробку для обеспечения перемещения между двумя аксиальными элементами. Данные и другие устройства можно использовать.
В описанных выше втулках 100 пошагового перемещения, показанных на фиг.2, 5A-5C и 7A-7C, использованы профили 146 на втулках 140, а в дротиках 160/180 гидроразрыва фиг.3 и 6 использованы отклоняющиеся шпонки 186 для сцепления с профилями 146, когда последние открыты. Можно использовать обратное устройство. Как показано на фиг.9A, втулка 100 пошагового перемещения имеет много одинаковых компонентов с описанными выше вариантами осуществления, для которых использованы одинаковые позиции ссылки. Втулка 140, вместе с тем, имеет совокупность шпонок или собачек 148, установленных в окружающих пазах во втулке. Пружины или другие отклоняющиеся элементы 149 смещают данные собачки 148 в данные пазы внутрь втулки 140 где проходит пробка гидроразрыва.
Вначале, данные шпонки 148 втянуты во втулку 140 так, что пробки или дротики гидроразрыва могут проходить, как необходимо. Вместе с тем, после приведения в действие вставки 120 одним из дротиков или другой пробкой и перемещения вниз во втулке 100 пошагового перемещения, дальний конец 122 вставки отсоединяется от шпонок 148. Это обеспечивает смещение пружинами 149 шпонок 148 наружу в канал 102 втулки 100. На данном этапе, следующий дротик 190 гидроразрыва фиг.10 должен соединяться со шпонкой 148.
Например, на фиг.10 показан дротик 190 гидроразрыва, имеющий уплотнение 192 и профиль 196. Как показано на фиг.9B, дротик 190 встречается с втулкой 140, и выдвинутые шпонки 148 сцепляются с открытым профилем 196. На данном этапе, давление текучей среды, приложенное к вошедшему в зацепление дротику 190, может перемещать втулку 140 вниз во втулке 100 пошагового перемещения для открытия окон 112 кожуха.
Описанные выше втулки 100 пошагового перемещения и дротики 160, 180, 190 имеют шпонки и профили для соединения внутри втулки 100 пошагового перемещения. Как альтернатива, втулка 100 пошагового перемещения, показанная на фиг.11A-11D использует пробку в форме шара 170 для соединения внутри втулки 100 пошагового перемещения. Также, данная втулка 100 пошагового перемещения имеет много одинаковых компонентов с описанным выше вариантом осуществления, так что использованы одинаковые позиции ссылки. Дополнительно, втулка 140 имеет совокупность шпонок или собачек 148, установленных в окружающих пазах во втулке 140. Пружины или другие отклоняющие элементы 149 смещают данные собачки 148 через данные пазы к внутреннему пространству втулки 140.
Вначале, шпонки 148 находятся во втянутом состоянии, как показано на фиг.11A-11B. После приведения в действие вставки 120, как показано на фиг.11C-11D, дальний конец 124 вставки отсоединяется от шпонок 148. Вместо сцепления с внутренними выступами на шпонках 148, как в описанном выше варианте осуществления, дальний конец 124, показанный на фиг.11A-11B, вначале перекрывает шпонки 148 и открывает их после перемещения вставки 120, как показано на фиг.11C-11D.
В любом случае, пружины 149 смещают шпонки 148 наружу в канал 102. На данном этапе, следующий шар 170 должен входить в контакт с выдвинутыми шпонками 148. Например, на концевом сечении на фиг.11В показано, как дальний конец 124 вставки 120 может удерживать шпонки 148, втянутыми во втулку 140, обеспечивая проход шаров 170 через увеличенный диаметр D. Напротив, на концевом сечении на фиг.11D показано, как выдвинутые шпонки 148 создают седло с ограниченным диаметром d для залавливания шара 170.
Как показано, можно использовать четыре таких шпонки 148, хотя любое подходящее число можно использовать. Как также показано, ближние концы шпонок 148 могут иметь уступы для сцепления с пазами внутри втулки для предотвращения выхода шпонки 148 из данных пазов. В общем, шпонки 148 могут быть выполнены с возможностью создания посадки с натягом с выдвижением на 1/8 дюйма (3 мм) для соединения с соответствующей пробкой (например, шар 170). Вместе с тем, допуск может зависеть от ряда факторов.
Когда сброшенный шар 170 достигает выдвинутых шпонок 148, как на фиг.11C-11D, давление текучей среды, закачиваемой в скважину через канал 102 втулки, создает силу давления на создающий препятствие шар 170. Затем сила давления освобождает втулку 140 от штифтов 141, вначале удерживающих ее в закрытом положении.
Как описано в данном документе, втулка 100 пошагового перемещения может иметь две вставки, например, вставка 120 и втулка 140. Втулка 140 имеет ловитель 146 и может перемещаться относительно окон 112 для обеспечения сообщения текучей среды между каналом 102 втулки и кольцевым пространством. Поскольку вставка 120 перемещается в кожухе 110 исполнительным механизмом 130, вставка 120 может вместо этого перекрывать окно в кожухе 110 для сообщения текучей среды. Таким образом, после перемещения вставки 120, втулка 100 пошагового перемещения может открываться.
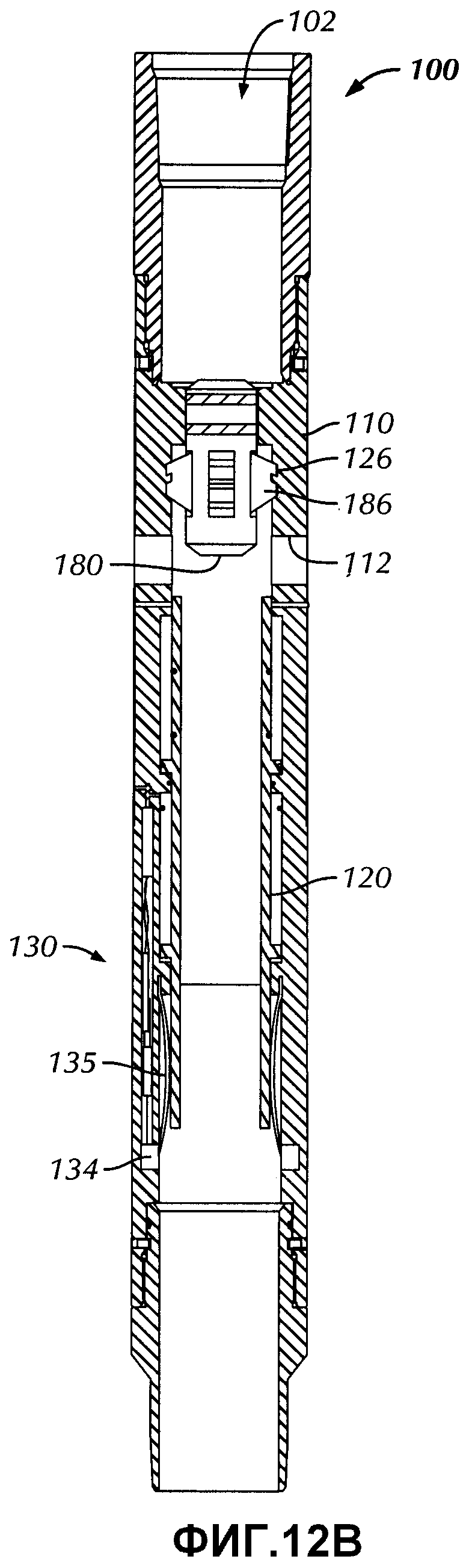
Как показано на фиг.12A-12B, другая втулка 100 пошагового перемещения имеет кожух 110, окна 112, вставку 120 и другие компоненты, аналогичные описанным выше. Данная втулка 100 пошагового перемещения не имеет второй вставки или втулки, например, 140, упомянутых выше вариантов осуществления. Вместо этого ловитель, т.e. профиль 126 или другой фиксирующий уступ выполнен в канале 102 кожуха 110.
Проходящий дротик 180 или другая пробка взаимодействует с пружиной 135 и сенсорным устройством 134 или другими компонентами исполнительного механизма 130, перемещающего вставку 120, как рассмотрено выше. Когда вставка 120 перемещается исполнительным механизмом 130, открываются окна 112 в кожухе 110, как показано на фиг.12B, так что канал 102 получает сообщение с кольцевым пространством. Одновременно, перемещение вставки 120 открывает закрепленный ловитель 126. Благодаря этому, следующий сброшенный дротик 180 или пробка может соединяться с ловителем 126 в канале 102 для закрытия нижнего участка колонны насосно-компрессорных труб. В зависимости от варианта реализации и того, какую обработку планируют для различных зон пласта, использование данной формы втулки 100 пошагового перемещения может являться предпочтительным для операторов.
Втулки пошагового перемещения и пробки, описанные в данном документе, можно использовать в соединении или с заменой другими втулками пошагового перемещения, пробками и устройствами, раскрытыми в заявке на патент США № 12/753331, включенной в данный документ в виде ссылки.
Приведенное выше описание предпочтительных и других вариантов осуществления не направлено на ограничение или сужение объема или применимости концепций изобретения, предложенного заявителями. Как описано выше, пробка может являться дротиком, шаром или любой другой сравнимой позицией для сброса в колонну насосно-компрессорных труб и установки в скользящей втулке. Соответственно, термин пробка, дротик, шар или т.п. можно использовать взаимозаменяемо в данном документе в отношении таких позиций. Как описано в данном документе, различные втулки пошагового перемещения, описанные в данном документе, могут быть выполнены с одной или другой скользящей втулкой. Возможно включение одного типа втулки пошагового перемещения и пробки в состав колонны насосно-компрессорных труб, имеющей другой тип втулки пошагового перемещения и пробки, как описано в данном документе. Данные и другие комбинации и устройства можно использовать согласно настоящему изобретению.
Прилагаемая формула изобретения считается включающей в себя все модификации и изменения в полном объеме, соответствующие объему следующей формулы изобретения или ее эквивалентам.
Реферат
Группа изобретений относится к горному делу, в частности к способу и устройству для проведения гидроразрыва пластов. Устройство подачи текучей среды имеет датчик, обнаруживающий пробки (дротики, шары, и т.д.), проходящие через инструмент. Исполнительный механизм перемещает вставку в инструменте после прохода заданного числа пробок через инструмент. Перемещение данной вставки открывает ловитель на втулке в инструменте. После сброса следующей пробки ловитель соединяется с пробкой на втулке так, что давление текучей среды, приложенное к пробке, установленной в колонне насосно-компрессорных труб, может перемещать втулку. После перемещения втулка открывает окна в инструменте, осуществляя сообщение канала инструмента с окружающим кольцевым пространством, что обеспечивает обработку примыкающего к стволу скважины интервала пласта для интенсификации притока. Исполнительный механизм может использовать датчик, обнаруживающий проход пробок через инструмент. Пружина, размещенная в инструменте, может изгибаться с приближением к датчику, когда пробка проходит через инструмент, и счетчик подсчитывает число проходов пробок. Технический результат заключается в повышении эффективности проведения многоступенчатого гидроразрыва за одну спуско-подъемную операцию. 2 н. и 30 з.п. ф-лы, 25 ил.
Формула
Документы, цитированные в отчёте о поиске
Система и способ заканчивания скважины, имеющей множество зон (варианты)
Комментарии