Система управления для управляемого с поверхности глубинного предохранительного клапана - RU2540762C2
Код документа: RU2540762C2
Чертежи
Описание
Изобретение относится к управляемым с поверхности глубинным предохранительным клапанам с электроприводом (SCSSV) для применения в подземных скважинах, конкретнее, к системе внутрискважинного управления и слежения, для использования с управляемым с поверхности глубинным клапаном управления.
Уровень техники
Настоящее изобретение относится, главным образом, к выполняемым операциям и оборудованию, используемому в связи с подземной скважиной и, в описываемом здесь варианте воплощения, в частности, представляет глубинный предохранительный клапан с электроприводом.
Иногда желательно устанавливать предохранительный клапан относительно глубоко в скважине. Например, предохранительный клапан может устанавливаться на глубине 10000 футов и более. Однако эксплуатация предохранительного клапана на таких глубинах создает ряд проблем, преодоление которых обходится дорого. По закону большая часть морских продуктивных углеводородных скважин должна включать в себя управляемый с поверхности глубинный предохранительный клапан (SCSSV), расположенный внутри скважины в эксплуатационной колонне для отсечения потока углеводородов в экстренной ситуации. В морских скважинах такие SCSSV обычно устанавливают ниже профиля дна. Поскольку морские скважины бурят при все увеличивающихся глубинах воды, и в водах, чувствительных к загрязнению окружающей среды, становится весьма желательным управление этими предохранительными клапанами с помощью электропривода, чтобы исключить использование гидравлических текучих сред и получить возможность устанавливать предохранительные клапаны практически при неограниченной глубине воды. Однако из-за глубины сложно доставлять электроэнергию для управления этими клапанами. К клапанам в скважине могут спускаться один или несколько проводов, хотя их количество ограничено из соображений пространства и конструкции. Кроме того, количество скважинных инструментов, приборов и др. конкурирует за ограниченное количество энергии, подводимой по проводам. Кроме того, если клапан или другое устройство установлен в скважине, его сложно извлечь и заменить. Если требуется дополнить или изменить функции деталей скважины, выполнение необходимых изменений является сложным и дорогим.
Кроме того, в среде скважины обычно давление, температуры, соленость, уровни рН, уровни вибрации, и др., в скважине изменяются, и предъявляют высокие требования. Кроме того, окружающая среда часто коррозионная, содержащая растворенные химические вещества, переносимые углеводородами или внедренными химикатами, такими как сероводород, двуокись углерода, и др. Таким образом, детали скважины должны быть рассчитаны на устойчивость к этим условиям, или должны быть изолированы от окружающей среды, например, герметичной камерой.
Раскрытие изобретения
Далее приведено упрощенное краткое описание, чтобы обеспечить базисное понимание некоторых аспектов раскрываемой темы, не ограничивая заявленного изобретения. Один вариант воплощения представляет управляемый с поверхности глубинный регулирующий клапан для использования в скважине. Клапан включает в себя корпус клапана, модуль перекрытия канала, механический рычажный механизм, модуль привода и внутрискважинный местный блок управления. В корпусе клапана выполнен канал для текучей среды, пропускаемой, когда модуль перекрытия канала находится в открытом положении. Когда модуль перекрытия канала находится в закрытом положении, модуль перекрытия канала предотвращает пропускание текучей среды через канал. Механический рычажный механизм функционально связан с модулем перекрытия канала и с модулем привода. Блок управления определяет усилие, прилагаемое к механическому рычажному механизму, на основании существующего эксплуатационного состояния клапана, и вынуждает модуль привода прилагать заданное усилие к механическому рычажному механизму. В результате механический рычажный механизм приводит в действие модуль перекрытия канала.
Краткое описание чертежей
Подробное описание приведено со ссылками на сопровождающие фигуры. На фигурах цифра(-ы) слева со ссылочными номерами, главным образом, определяют цифру, под которой ссылочный номер появляется впервые. Использование одних и тех же ссылочных номеров на различных фигурах обычно указывает те же самые или идентичные элементы. Использование терминов «верх» и «вниз» касается контрольной точки и не предназначено для ограничения изобретения. Изобретение можно использовать в вертикальных, наклонных и горизонтальных скважинах.
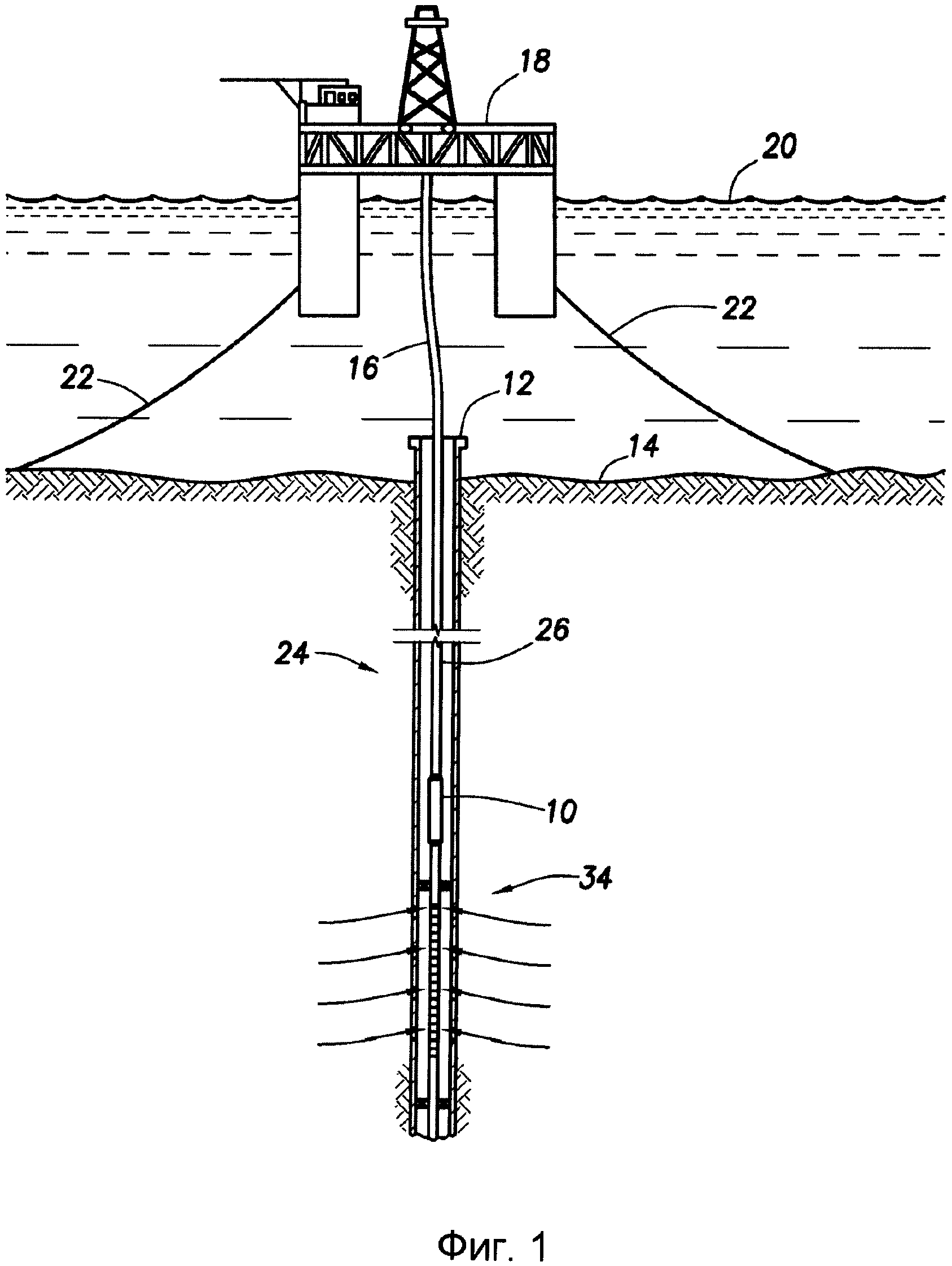
На фиг.1 показан клапан, установленный в морской продуктивной углеводородной скважине.
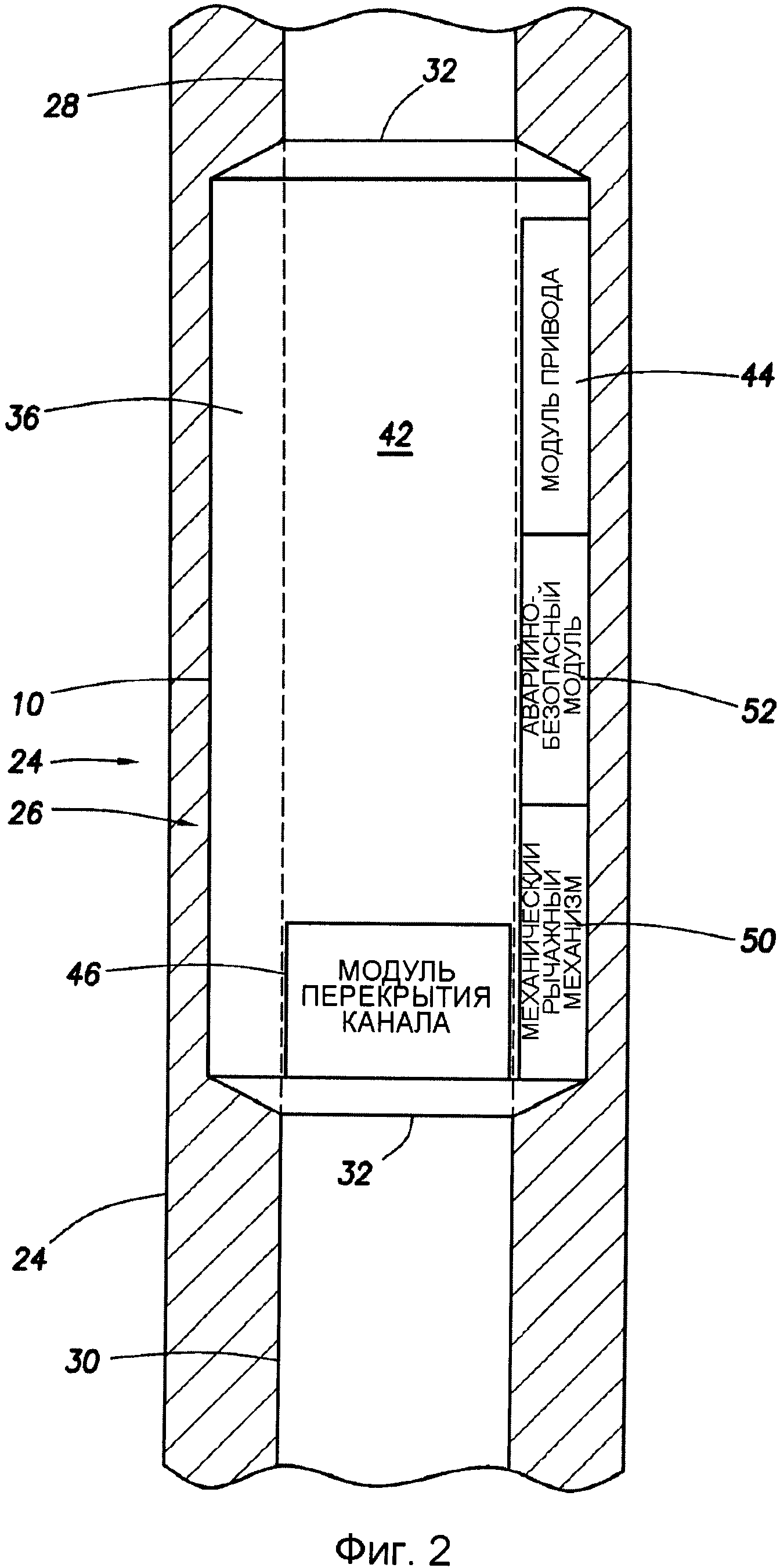
На фиг.2 приведено поперечное сечение, показывающее детали клапана, установленного в скважине.
На фиг.3 приведено поперечное сечение клапана с электромеханическим приводом, установленного в скважине.
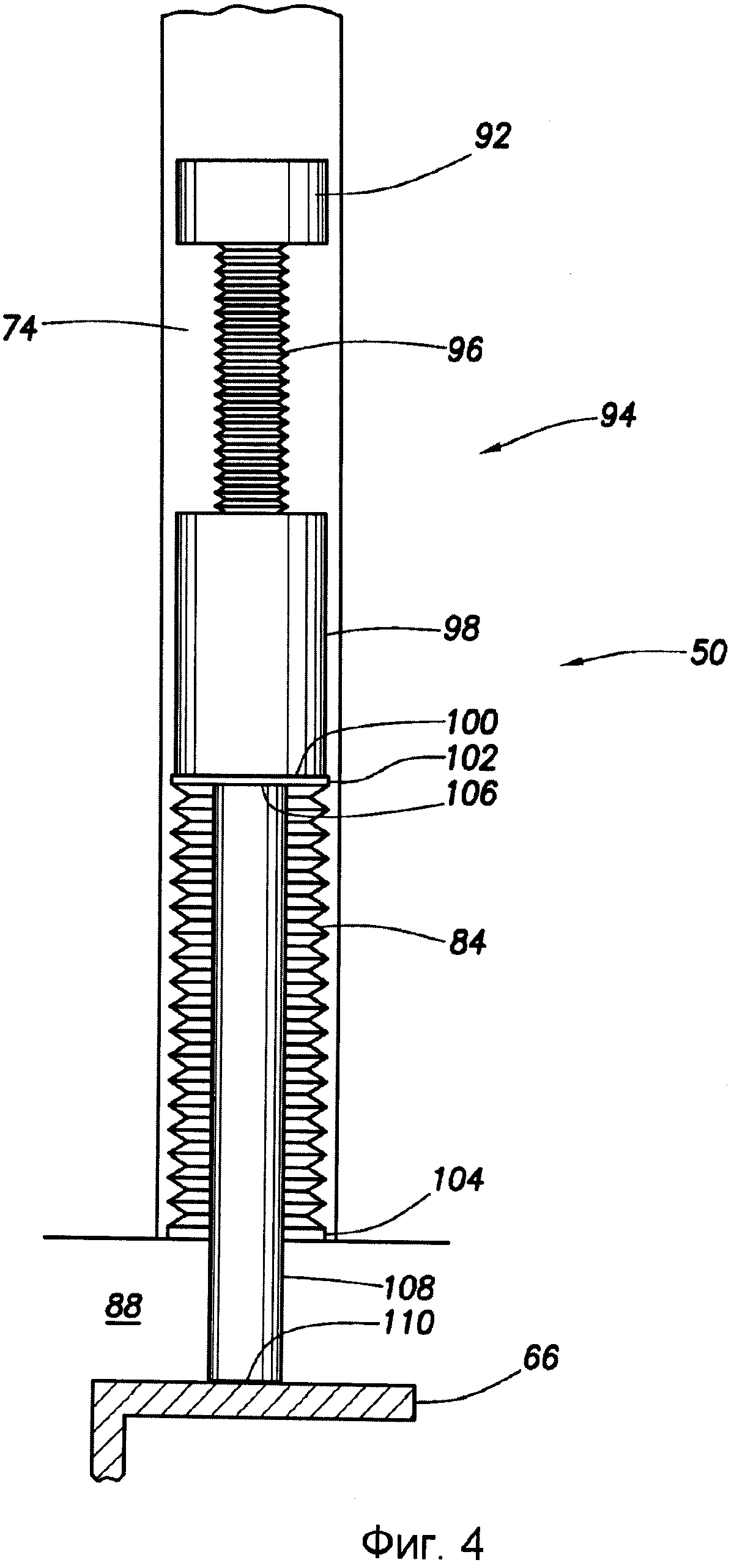
На фиг.4 показан вид крупным планом модуля шариковой винтовой пары и расположение сильфона клапана для использования в скважине.
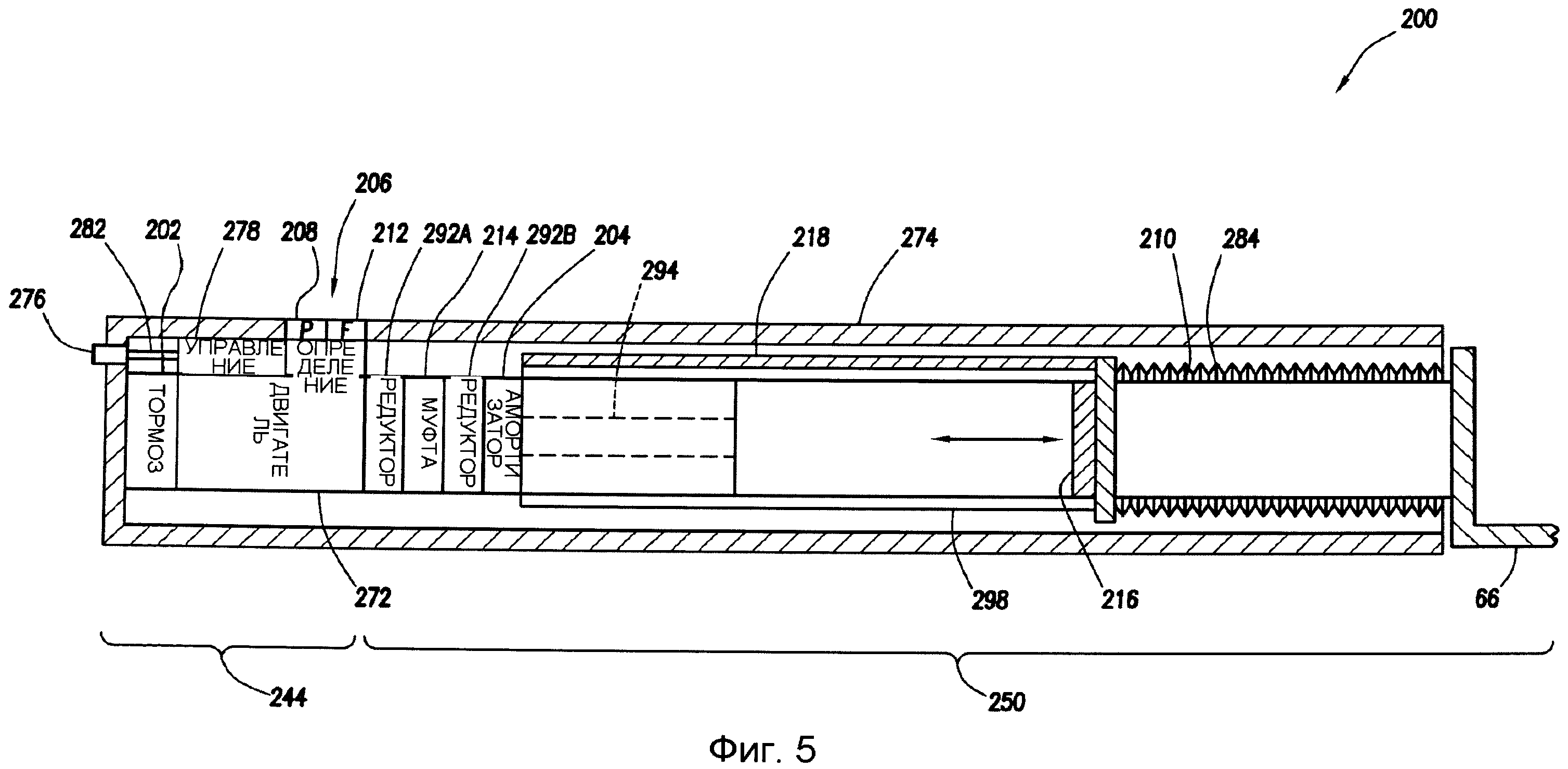
На фиг.5 приведено поперечное сечение клапана с электрическим приводом для использования в скважине.
На фиг.6 изображена блок-схема системы управления для клапана, используемого в скважине.
На фиг.7 показана блок-схема способа управления клапаном в скважине.
Осуществление изобретения
В настоящем документе описаны системы и способы управления управляемыми с поверхности глубинными предохранительными клапанами (SCSSV). Понятно, что системы и способы могут также применяться для управления другими управляемыми с поверхности глубинными устройствами.
На фиг.1 показан клапан, согласно настоящему изобретению, установленный в морской продуктивной углеводородной скважине. В варианте воплощения, приведенном на фиг.1, устье скважины 12 покоится на океанском дне 14 и соединено гибкой водоотделяющей колонной 16 с эксплуатационным оборудованием 18, плавающим на океанской поверхности 20, и заякоренным в океанском дне тросом 22. Эксплуатационная колонна 24 скважины включает в себя гибкую водоотделяющую колонну 16 и внутрискважинную эксплуатационную колонну 26, расположенную в стволе скважины ниже устья скважины 12. Клапан 10 смонтирован во внутрискважинной эксплуатационной колонне 26 ниже устья скважины. Как показано на фиг.2, клапан 10 предпочтительно смонтирован между верхней секцией 28 и нижней секцией 30 внутрискважинной эксплуатационной колонны 26 с помощью резьбового соединения 32. Положение, в котором клапан 10 монтируется во внутрискважинной эксплуатационной колонне 26, обычно зависит от особенностей данной скважины, но, как правило, клапан 10 монтируется выше по течению от зоны 34 накопления углеводородов внутрискважинной эксплуатационной колонны 26, как показано на фиг.1.
Со ссылками на фиг.2 и 3, клапан 10 состоит из корпуса 36 клапана, снабженного верхним узлом 38, нижним узлом 40, и продольным каналом 42, проходящим по длине корпуса 36 клапана. Продольный канал 42 образует проход для текучей среды между нижней секцией 30 и верхней секцией 28 внутрискважинной эксплуатационной колонны 26. Клапан 10 может, кроме того, включать в себя модуль привода 44 уравнивания давления, связанный с модулем 46 перекрытия канала. Как используется в настоящем изобретении, модуль 44 привода уравнивания давления означает, что конфигурация привода, при которой усилию привода необходимо только преодолеть силу сопротивления, которая обычно смещает модуль 46 перекрытия канала в закрытое или другое положение (например, усилие пружины 48, как показано на фиг. 3). Модуль 44 привода уравнивания давления использует механический рычажный механизм 50 для привода перемещения модуля 46 перекрытия канала в открытое положение под влиянием управляющего сигнала. Аварийно-безопасный модуль 52 расположен и настроен так, чтобы удерживать модуль 46 перекрытия канала в открытом положении, пока принимается управляющий сигнал, и чтобы отпускать модуль 46 перекрытия канала для возврата в закрытое положение при прерывании управляющего сигнала. Характерной особенностью модуля 44 привода уравнивания давления является то, что он не должен преодолевать дополнительное усилие, создаваемое перепадом давления или гидростатическим напором управляющей текучей среды, подаваемой с поверхности. Однако модуль привода не должен быть модулем 44 привода уравнивания давления.
Тогда как модуль 44 привода уравнивания давления, аварийно-безопасный модуль 52 и механический рычажный механизм 50 показаны, как отдельные детали на фиг.2, должно быть понятно, что эти три узла могут быть объединены в менее чем трех узлах. Например, в такие клапаны 10 могут быть включены один модуль привода/аварийной блокировки/рычажного механизма или два модуля, такие как модуль привода/аварийной блокировки, соединенный с узлом рычажного механизма, или модуль привода, соединенный с узлом аварийной блокировки/рычажного механизма. В некоторых вариантах воплощения модуль 44 привода уравнивания давления, аварийно-безопасный модуль 52 и механический рычажный механизм 50 заключены в верхнем узле 38 клапана 10, а модуль 46 перекрытия канала заключен в нижнем узле 40 клапана 10.
В варианте воплощения, показанном на фиг.3, модуль 46 перекрытия канала представляет собой дроссельную заслонку, расположенную в продольном канале 42, вблизи нижнего конца клапана 10. Однако в рамках изобретения находятся и другие типы клапанов, такие как шаровые клапаны, шиберные затворы, дисковые поворотные клапаны и др. Как подсказывает название, дроссельная заслонка открывает и закрывает клапан для пропускания текучей среды с помощью поворота заслонки 54 (фиг.3) вокруг шарнира 56 на оси 58, перпендикулярной оси 60 продольного канала 42. Заслонка 54 может приводиться в действие перемещаемой в осевом направлении трубкой Вентури 62, которая перемещается в продольном направлении в продольном канале 42. Нижний конец 64 трубки Вентури примыкает к заслонке 54, и принуждает заслонку поворачиваться вокруг шарнира 56, и открывать клапан 10 для пропускания текучей среды при нисходящем движении трубки Вентури 62. Пружина сжатия 48, расположенная между ободом 66 трубки Вентури и седлом 68 заслонки, обычно смещает трубку Вентури 62 в направлении вверх, так что нижний конец 64 трубки Вентури в закрытом положении не прижат вниз к заслонке 54. Когда трубка Вентури находится в выведенном положении, заслонка 54 может свободно поворачиваться вокруг оси 58 под влиянием усилия смещения, прилагаемого, например, пружиной кручения (не показана), расположенной вдоль оси 58, и прилагающей усилие к шарниру 56. Заслонка 54 может поворачиваться вокруг оси 58, так что поверхность 70 герметизации контактирует с седлом 68 заслонки, таким образом герметизируя канал 42 для прохода текучей среды.
В другом варианте воплощения (не показан), модуль 46 перекрытия канала представляет собой шаровой клапан, расположенный в продольном канале 42, вблизи нижнего конца клапана 10. В шаровых клапанах используется поворотная сферическая головка или шарик, снабженный центральным проточным каналом, который может совмещаться с продольным каналом 42, чтобы открывать клапан 10 для пропускания текучей среды. Поворот шарового клапана на угол около 52 градусов или больше будет препятствовать потоку через продольный канал 42 шарового клапана, таким образом, закрывая SCSSV для прохода текучей среды. Шаровой клапан может смещаться, чтобы закрывать продольный канал 42 для прохода текучей среды.
Обычно дроссельные заслонки и шаровые клапаны приводятся в действие с помощью увеличения или уменьшения давления управляющей текучей среды в отдельной линии управления, проходящей от клапана до океанской поверхности 20. Поскольку эти клапаны устанавливаются на все больших глубинах, длина линии управления увеличивается, что приводит к увеличению давления управляющей текучей среды в клапане вследствие гидростатического напора столба управляющей текучей среды в линии управления.
В результате повышенного давления могут возникнуть проблемы с гидравлическим управляющим сигналом с поверхности. Например, растянутая линия управления может вызвать задержку времени закрывания клапана и налагать предельные критерии конструкции для этих клапанов и связанного с ними оборудования, как скважинного, так и на поверхности. Таким образом, в варианте воплощения, показанном на фиг.2, модуль привода 44 уравнивания давления (также называемое компенсацией давления), используется для приведения в действие модуля 46 перекрытия канала вместо гидравлического управляющего сигнала с поверхности.
Со ссылками на фиг.2-4, модуль привода 44 уравнивания давления включает в себя исполнительный механизм, связанный через механический рычажный механизм 50 с узлом 46 перекрытия канала, для привода модуля 46 перекрытия канала, чтобы открывать клапан 10 (в ответ на электронный управляющий сигнал с поверхности). Исполнительный механизм может быть электрическим, например, двигателем (переменного или постоянного тока) или, в частности, шаговым двигателем 72 (как показано на фиг.3). В варианте воплощения, показанном на фиг.3, модуль 44 привода уравнивания давления включает в себя шаговый двигатель 72, заключенный в герметичную камеру 74, заполненную несжимаемой жидкостью, например жидким диэлектриком, таким как жидкий перфторуглерод. Шаговый двигатель 72 может быть окружен чистой рабочей средой и обособлен от прямого контакта со скважинным флюидом. Могут использоваться другие типы двигателей исполнительного механизма, включая, помимо прочего, двигатели переменного тока, постоянного тока, бесщеточные, щеточные, серводвигатели, шаговые двигатели, бессердечниковые, линейные и др., известные в современной технике.
В некоторых вариантах воплощения шаговый двигатель 72 подключен через разъем 76 к локальному контроллеру 78, такому как плата с микроконтроллером и/или схема управления исполнительного механизма. Локальный контроллер 78 может быть заключен в отдельную камеру для контроля, которая не заполнена текучей средой, и которая отделена от герметичной камеры 74 с помощью уплотнения 80 высокого давления. Однако локальный контроллер 78 может быть заключен в ту же заполненную жидкостью камеру, что и шаговый двигатель 72, при условии, что локальный контроллер 78 рассчитан на то, чтобы выдерживать рабочие условия внутри нее. Локальный контроллер 78 может получать управляющие сигналы с поверхности и отправлять информационные сигналы обратно на поверхность, например по электропроводу 82 или по беспроводному передающему устройству (не показано). В случае использования электропровода, управляющий сигнал является предпочтительно управляющим сигналом малой мощности, который потребляет менее 12 ватт, для уменьшения размера провода, используемого для передачи сигнала на возможно большие расстояния, связанные с глубокой установкой SCSSV. Питание к шаговому двигателю 72 может подаваться через прямое электрическое подключение к электропроводу 82, или через стенку герметичной камеры 74 с помощью источника индуктивности, расположенного снаружи герметичной камеры 74 путем использования индуктивной связи.
Герметичная камера 74, кроме того, содержит средства для уравнивания давления несжимаемой жидкости с давлением скважинного флюида или скважинного кольцевого зазора, содержащегося в продольном канале 42. В предпочтительном варианте воплощения, сильфоны 84 и 86 используются для уравнивания давления несжимаемой жидкости в герметичной камере 74 с давлением скважинного флюида. Один из сильфонов 84 находится в гидравлической связи с жидкостью камеры и скважинным флюидом 88. Сильфон 86 находится в гидравлической связи с жидкостью камеры и скважинным флюидом 88, как показано, через канал 90. Некоторые варианты воплощения, в которых сильфон 84 является герметичным сильфоном, а сильфон 86 является компенсационным сильфоном, раскрыты в международной заявке №РСТ/ЕРОО/01552 с датой подачи международной заявки 16 февраля 2000 г., и международной публикации №WO 00/53890 с датой международной публикации 14 сентября 2000 г. (которые здесь включены в качестве ссылки в полном объеме для всех целей). Хотя это описание сосредоточено на сильфонах, специалисту в данной области техники должно быть понятно, что для использования возможны другие варианты воплощения, включая, например, и помимо прочего, один или несколько уравновешивающих поршней или резервуаров текучей среды. Резервуары текучей среды могут принимать любую известную форму, такую как баки, протяженные трубопроводы, кольцевая полость и др.
В настоящем варианте воплощения механический рычажный механизм 50 используется модулем 44 привода уравнивания давления для приложения действующей силы к модулю 46 перекрытия канала, чтобы открывать клапан 10 для прохода текучей среды. Механический рычажный механизм 50 может представлять собой любую комбинацию или конфигурацию элементов, подходящую для достижения желаемого приведения в действие модуля 46 перекрытия канала. В варианте воплощения показанном на фиг.3, механический рычажный механизм 50 включает в себя зубчатый редуктор 92 и шариковую винтовую пару 94, или, альтернативно, вместо шариковой винтовой пары, роликовый ходовой винт.
На фиг.4 показан механический рычажный механизм 50, который включает в себя шариковую винтовую пару 94 и сильфон для клапана 10. Шариковая винтовая пара 94, кроме того, включает в себя шаровой винт 96, верхний конец которого соединен с зубчатым редуктором 92, а нижний конец которого ввинчен в ходовую гайку 98. Зубчатый редуктор 92 служит для усиления вращающего момента шагового двигателя 72, передаваемого к шариковой винтовой паре 94. В линии привода между двигателем 72 и шариковой винтовой парой 94 могут использоваться несколько зубчатых редукторов 92. Нижний конец 100 ходовой гайки 98 контактирует с нижней поверхностью 102 сильфона 84. Сильфон 84 жестко соединен с краем 104 герметичной камеры 74 и предназначен для растяжения или сжатия вверх от края 104 и в герметичную камеру 74. Нижняя сторона торцевой поверхности 102 сильфона 84 контактирует с верхним концом 106 силового штока 108, который подвергается воздействию скважинного флюида 88. Нижний конец 110 силового штока 108 контактирует и жестко соединен с ободом 66 трубки Вентури. Ходовая гайка 98 удерживается от вращения, и, под влиянием вращения шарового винта 96 от зубчатого редуктора 92, перемещается в осевом направлении, посредством чего перемещается силовой шток 108 и обод 66 трубки Вентури вниз, чтобы открывать клапан 10 для прохода текучей среды. Альтернативно, ходовая гайка 98 может вращаться, тогда как шариковый винт 96 удерживается от вращения, таким образом, вызывая относительное перемещение между этими деталями для приведения в действие трубки Вентури 62.
Альтернативно, как показано на фиг.3, сильфон 84 может служить для расширения или сжатия в направлении вниз от герметичной камеры 74, а не вверх от герметичной камеры 74. В варианте воплощения по фиг.3, верхний конец силового штока 108 контактирует и неподвижно соединен с нижним концом ходовой гайки 98. Кроме того, в настоящем варианте воплощения, нижний конец силового штока 108 контактирует с верхней стороной торцевой поверхности сильфона 84 (которая контактирует с ободом 66 трубки Вентури).
Согласно фиг.2, аварийно-безопасный модуль 52 установлен и сконфигурирован для удержания модуля 46 перекрытия канала в открытом положении (обычно называемом положением «полного открывания»), когда принимается управляющий сигнал. Кроме того, аварийно-безопасный модуль 52 настроен для освобождения модуля 46 перекрытия канала, для возврата в закрытое положение при прерывании управляющего сигнала, который также называют сигналом «удержания». Сигнал удержания передается по проводам или по беспроводной связи из центра управления, расположенного на поверхности. В случае прерывания сигнала удержания (приводящего к тому, что аварийно-безопасный модуль 52 больше не принимает сигнал удержания), аварийно-безопасный модуль 52 освобождает модуль 46 перекрытия канала для автоматического возврата в закрытое положение. Иначе говоря, клапан 10 по настоящему варианту воплощения является аварийно-безопасным клапаном.
Сигнал удержания может быть прерван, например, непреднамеренно, событием на колонне, устье скважины, или эксплуатационном оборудовании, или намеренно, оператором по добыче, стремящимся к остановке скважины под влиянием конкретных условий эксплуатации, или по необходимости (например, для обслуживания, испытаний, по производственному плану и др.). В сущности, модуль 44 привода уравнивания давления является тем, что «поднимает» или «взводит» клапан 10, приводя клапан 10 из нормально закрытого положения в открытое положение. Поэтому аварийно-безопасный модуль 52 служит как «спусковой механизм», удерживая клапан 10 в открытом положении в течение нормального рабочего состояния, под влиянием сигнала удержания. Прерывание или потеря сигнала удержания приводят к тому, что клапан 10 автоматически «срочно» закрывается.
В варианте воплощения, показанном на фиг.3, аварийно-безопасный модуль 52 содержит устройство 112, препятствующее обратному ходу, и электромагнитную муфту 114. Аварийно-безопасный модуль 52 можно настроить так, чтобы электромагнитная муфта 114 располагалась между устройством 112, препятствующим обратному ходу (которое соединено с шаговым двигателем 72) и зубчатым редуктором 92 (который соединен с шариковой винтовой парой 94), при условии, однако, что отдельные элементы аварийно-безопасного модуля 52 могут быть расположены в любом работоспособном положении. Например, электромагнитная муфта 114 может располагаться между зубчатым редуктором 92 и шариковой винтовой парой 94. Альтернативно, электромагнитная муфта 114 может быть помещена между заданными положениями зубчатого редуктора. При включении электромагнитная муфта 114 является частью соединения для шагового двигателя 72 для привода шариковой винтовой пары 94. И наоборот, когда электромагнитная муфта 114 отключена, шаговый двигатель 72 механически разобщен с шариковой винтовой парой 94. Локальный контроллер 78 включает электромагнитную муфту 114, подводя электрический ток к электромагнитной муфте 114, и выключает электромагнитную муфту, отключая ток от нее.
Под влиянием управляющего сигнала для открытия клапана 10, шаговый двигатель 72 приводится в действие, и электромагнитная муфта 114 включается, чтобы приводить в действие шариковую винтовую пару 94, таким образом, прижимая трубку Вентури 62 вниз, к заслонке 54, и открывая клапан 10 для прохода текучей среды. Шаговый двигатель 72 приводит модуль 46 перекрытия канала в открытое положение, по мере считывания и передачи данных к модулю привода (т.е., шаговому двигателю 72) посредством считывания и передачи данных о положении модуля 46 перекрытия канала. Примером подходящего средства для считывания и передачи данных о положении модуля 46 перекрытия канала является цепь обратной связи, считывающая положение модуля 46 перекрытия канала (или положения трубки Вентури 62, заслонки 54, или шариковой гайки шариковой винтовой пары 94) и передающая данные об этом положении локальному контроллеру 78.
Как показано на фиг.3, устройство 112, препятствующее обратному ходу, предотвращает обратный ход шариковой винтовой пары 94. Предпочтительно устройство 112, препятствующее обратному ходу, передает вращательное усилие только в одном направлении. Таким образом, в ряде вариантов воплощения устройство 112, препятствующее обратному ходу, включает в себя обгонную муфту. Под влиянием вращения шагового двигателя 72, обгонная муфта свободно вращается и остается отключенной. И, наоборот, под влиянием реверсного усилия или усилия обратного хода, передаваемого пружиной 48 через шариковую винтовую пару 94, зубья в обгонной муфте зацепляются, таким образом, препятствуя обратному вращению, и запирая модуль 46 перекрытия канала в открытом положении. В качестве альтернативы, или в дополнение, устройства 112, препятствующие обратному ходу, могут включать в себя не приводимый в обратном направлении зубчатый редуктор, электромагнитный тормоз, тормоз с комплектом пружин, тормоз с постоянным магнитом на шаговом двигателе 72, средство для фиксирования мощности на шаговом двигателе 72 (т.е., «запирания ротора» на электрическом двигателе), запирающий элемент, пьезоэлектрическое устройство, магнето-реологическое (MR) устройство, и др. Одновременно рассматриваемый патент США №6 619 388 под названием «Аварийно-безопасный, управляемый с поверхности, глубинный предохранительный клапан для использования в скважине», автора Dietz и др., опубликованный 16 сентября 2003 г. (который включен сюда в качестве ссылки для всех целей) иллюстрирует варианты воплощения устройства 112, препятствующего обратному ходу.
Независимо от его формы, устройство 112, препятствующее обратному ходу, удерживает модуль 46 перекрытия канала в открытом положении, пока электромагнитная муфта 114 остается включенной. В настоящем варианте воплощения, сигнал удержания является электрическим током, приводящим к включению электромагнитной муфты 114. Как описано ранее, сигнал удержания может прерываться намеренно (например, оператором, передающим сигнал локальному контроллеру для закрывания клапана) или ненамеренно (например, вследствие прерывания питания или связи). После прерывания сигнала удержания, электромагнитная муфта 114 по настоящему варианту воплощения отключается, позволяя шариковой винтовой паре 94 изменить ход, трубке Вентури 62 перемещаться вверх под влиянием силы смещения пружины 48, и заслонке 54 вращаться вокруг оси 58, закрываясь. Таким образом, электромагнитная муфта 114 изолирует шаговый двигатель 72 от реверсного усилия или усилия обратного хода, передаваемого через механический рычажный механизм 50, таким образом предотвращая повреждение шагового двигателя 72 и других элементов и облегчая быстрое закрывание клапана 10 (в некоторых вариантах воплощения закрывание происходит менее чем примерно за 5 секунд).
Со ссылками на фиг.5 приведено поперечное сечение клапана с электрическим приводом для использования в скважине. Исполнительный механизм 200 включает в себя силовой шток 210, электромагнитную муфту 214, модуль привода 244, механический рычажный механизм 250, шаговый двигатель 272, герметичную камеру 274, разъем 276, локальный контроллер 278, электропровод 282, сильфон 284, зубчатые редукторы 292, шариковую винтовую пару 294, и ходовую гайку 298. Исполнительный механизм 200 также включает в себя блок 206 датчиков, содержащий несколько датчиков, таких как датчик 208 давления, датчик 212 расхода, блок 216 датчика нагрузки, и датчик 218 положения. Могут использоваться другие датчики, известные на современном уровне техники. Исполнительный механизм 200 может получать электрические силовые и управляющие сигналы через разъем 276 и провод 282. Кроме того, исполнительный механизм 200 приводит в действие обод 66 трубки Вентури посредством силового штока 210 для открывания, закрывания или перемещения в другое положение модуля 46 перекрытия канала (см. фиг.2 и 3).
В качестве альтернативы, или в дополнение, исполнительный механизм 200 может получать мощность в определенном месте, как описано в одновременно рассматриваемом патенте США №6717283, опубликованном Skinner и др. 6 апреля 2004 г., под названием «Электрический генератор мощности, управляемый давлением в кольцевом зазоре»; патенте США №6848503, опубликованном Schultz и др. 1 февраля 2005 г., под названием «Скважинная система генерации энергии для глубинной эксплуатации»; патенте США №6 672 382, опубликованном Schultz и др. 6 января 2004 г., под названием «Глубинная электроэнергетическая система»; патенте США №7165608, опубликованном Schultz и др. 23 января 2007 г., под названием «Скважинная система генерации энергии для глубинной эксплуатации»; или публикации патента США №20060191681, поданной Storm и др. 31 августа 2006 г., под названием «Перезаряжаемый аккумулятор при глубинной эксплуатации», каждый из которых включен сюда в качестве ссылки для всех целей. Как правило, различные элементы исполнительного механизма 200 заключены в герметичную камеру 274 и/или сильфон 284, чтобы изолировать их от скважинной среды, и чтобы сделать исполнительный механизм 200 «сбалансированным по давлению». Однако разъем 276, датчик 208 давления и датчик 212 расхода могут проникать в герметичную камеру 275, соответственно, для передачи электрических сигналов, определения давления в скважинной среде и определения расхода углеводородов, бурового раствора, и др. в скважинной среде.
Механически элементы исполнительного механизма 200 могут быть функционально связаны, как показано на фиг.5, для позиционирования модуля 46 перекрытия канала. Конкретнее, модуль привода 244 может быть функционально связан с механическим рычажным механизмом 250 и может выполнять привод в двух направлениях. Кроме того, механический рычажный механизм 250 может быть функционально связан с ободом 66 трубки Вентури, чтобы она могла открывать, закрывать или пошагово позиционировать модуль 46 перекрытия канала (см. фиг.2 и 3).
Модуль привода 244 может включать в себя тормоз 208 и шаговый двигатель 272, тогда как механический рычажный механизм 250 может включать в себя зубчатые редукторы 292, электромагнитную муфту 214, амортизатор 204, шариковый винт 294, шариковую гайку 298, и силовой шток 210. В зависимости от рабочего состояния клапана (в котором установлен исполнительный механизм 200) может возникнуть случай, когда модуль 46 перекрытия канала приводит в обратном направлении, или пытается привести в обратном направлении, механический рычажный механизм 250 и, следовательно, модуль 244 привода. Поскольку шаговые двигатели 272 обычно сопротивляются усилиям, пытающимся привести их к перемещению в обратном направлении, исполнительный механизм 200 не предрасположен к повреждению при приводе в обратном направлении. Однако зубчатые редукторы 292 обеспечивают сопротивление таким усилиям обратного привода, в зависимости от передаточного числа. Кроме того, электромагнитная муфта 214 (будучи выключенной) обеспечивает еще один уровень защиты от обратного привода шагового двигателя 272.
С дальнейшими ссылками на фиг.5, тормоз 202 и шаговый двигатель 272 могут быть установлены на одном конце исполнительного механизма 200 и быть функционально связанными так, чтобы, когда сигнал подается к тормозу 202 (или отключается от него), электродвигатель 272 замедляется и/или останавливается. Шаговый двигатель 272 может быть функционально связан с одним из зубчатых редукторов 292А, который, в свою очередь, функционально связан с ведомой стороной электромагнитной муфты 214. Другой зубчатый редуктор 292В может быть функционально связан с ведущей стороной электромагнитной муфты 214. Таким образом, когда электромагнитная муфта 214 включена, и шаговый двигатель 272 вращается, зубчатый редуктор 292В также вращается, но со скоростью, определяемой передаточными числами зубчатых редукторов 292. Однако, когда электромагнитная муфта 214 выключена, шаговый двигатель 272 и зубчатый редуктор 292 В механически разобщены.
Кроме того, амортизатор 204 может быть функционально связан с выходной стороной зубчатого редуктора 292 В и с шариковым винтом 294. Таким образом, амортизатор 204 может изолировать шаговый двигатель 272, зубчатые редукторы 292, и электромагнитную муфту 214 от вибраций, ударов и избыточных скоростей вращения, возникающих в других местах механического рычажного механизма 250 и модуля 46 перекрытия канала, и наоборот.
Со ссылкой на фиг.5, шариковый винт 294 и шариковая гайка 298 могут соединяться друг с другом с возможностью скольжения, так что, если один или другая зафиксированы от вращения, они перемещаются друг относительно друга, когда шаговый двигатель 272 приводит в действие шариковый винт 298 с помощью указанных элементов. Кроме того, шариковая гайка 298 и силовой шток 210 могут примыкать к сильфону 284 на их противоположных сторонах. Конкретнее, в вариантах воплощения в которых желательно, чтобы шаговый двигатель 272 приводил в действие модуль 246 перекрытия канала в двух направлениях, шариковая гайка 298 и силовой шток 210 могут механически соединяться с частью сильфона 284, имеющей размеры и форму, подходящую для передачи нагрузки между этими двумя элементами. В результате, когда шаговый двигатель 272 вращается, шариковая гайка 298 приводит в действие силовой шток 210, который толкает или тянет обод 66 трубки Вентури. Альтернативно или помимо того, если модуль 46 перекрытия канала смещается в одно или другое положение, закрывание канала может придавать обратный ход (в любом направлении) механическому рычажному механизму 250 и/или модулю привода 244, что определяется конфигурацией зубчатых редукторов 292, электромагнитной муфты 214, тормоза 202 и др.
Как показано на фиг.5, блок 216 датчика нагрузки также может быть включен в модуль привода 244 и/или в механический рычажный механизм 250. Например, блок 216 датчика нагрузки может устанавливаться между шариковой гайкой 298 и сильфоном 284 и внутри герметичной камеры 274. В настоящем варианте воплощения блок 216 датчика нагрузки включает в себя тензодатчик, определяющий усилие, развиваемое между шариковой гайкой 298 и сильфоном 284, когда действует шаговый двигатель 272, или даже в состоянии покоя. В качестве альтернативы или помимо того, блок 216 датчика нагрузки может быть расположен и настроен так, чтобы определять вращающий момент, развиваемый между различными вращающимися элементами модуля привода 244 и/или механического рычажного механизма 250. Независимо от местоположения блока 216 датчика 15 нагрузки, он может (с помощью определения нагрузки между различными элементами) определять сопротивление действию шагового двигателя 272, которое может развиваться в модуле привода 244, механическом рычажном механизме 250, и других элементах клапана 10 (например, ободе 66 трубки Вентури и модуле 46 перекрытия канала).
Кроме того, блок датчика нагрузки может быть блоком электрического датчика нагрузки для определения электрической нагрузки, полного сопротивления или мощности, потребляемой цепью. Такой датчик нагрузки может использоваться для определения электрической нагрузки, ее изменения со временем, и ее зависимости от мощности, подводимой к шаговому двигателю или другим частям клапана.
В некоторых вариантах воплощения может быть установлен датчик 218 положения для определения положения модуля 46 перекрытия канала, непосредственно или косвенно (т.е., через положение, связанное с механическим рычажным механизмом 250). Например, датчик 218 положения может выступать из части герметичной камеры 274, определяемой ходом ходовой гайки 298. Датчик 218 положения может быть индуктивным (на эффекте Холла), потенциометром, или другим типом датчика. В качестве альтернативы или помимо того, датчик 218 положения может быть встроен в шифратор или функционально связан с шаговым двигателем 272 или другим вращающимся элементом модуля 244 привода или механического рычажного механизма 250.
На фиг.5 показано, что блок 206 датчика может включать в себя несколько датчиков, таких как датчик 208 давления, датчик 212 расхода, датчик электрического тока, датчик напряжения, и др. вместе с формирователями сигналов, усилителями и другими элементами. Тогда как на фиг.5 показан блок 216 датчика нагрузки и датчик 218 положения, физически отделенные от блока 206 датчиков, блок 206 датчиков может включать в себя блок 216 датчика нагрузки и датчик 218 положения. В качестве альтернативы, различные датчики 208, 212, 216 и 218 (а также другие) могут быть физически отделены, но электрически связаны с формирователями сигналов, усилителями и другими элементами блока 206 датчиков. В зависимости от нужд пользователя, локальный контроллер 278 может быть настроен так, чтобы воспринимать один или несколько сигналов от указанных датчиков и чтобы управлять клапаном 10 в режиме замкнутого контура в соответствии с принятым(-и) сигналом(-ами). Таким образом, клапаны в различных вариантах воплощения действуют как клапаны регулирования давления, клапаны регулирования потока и пр.
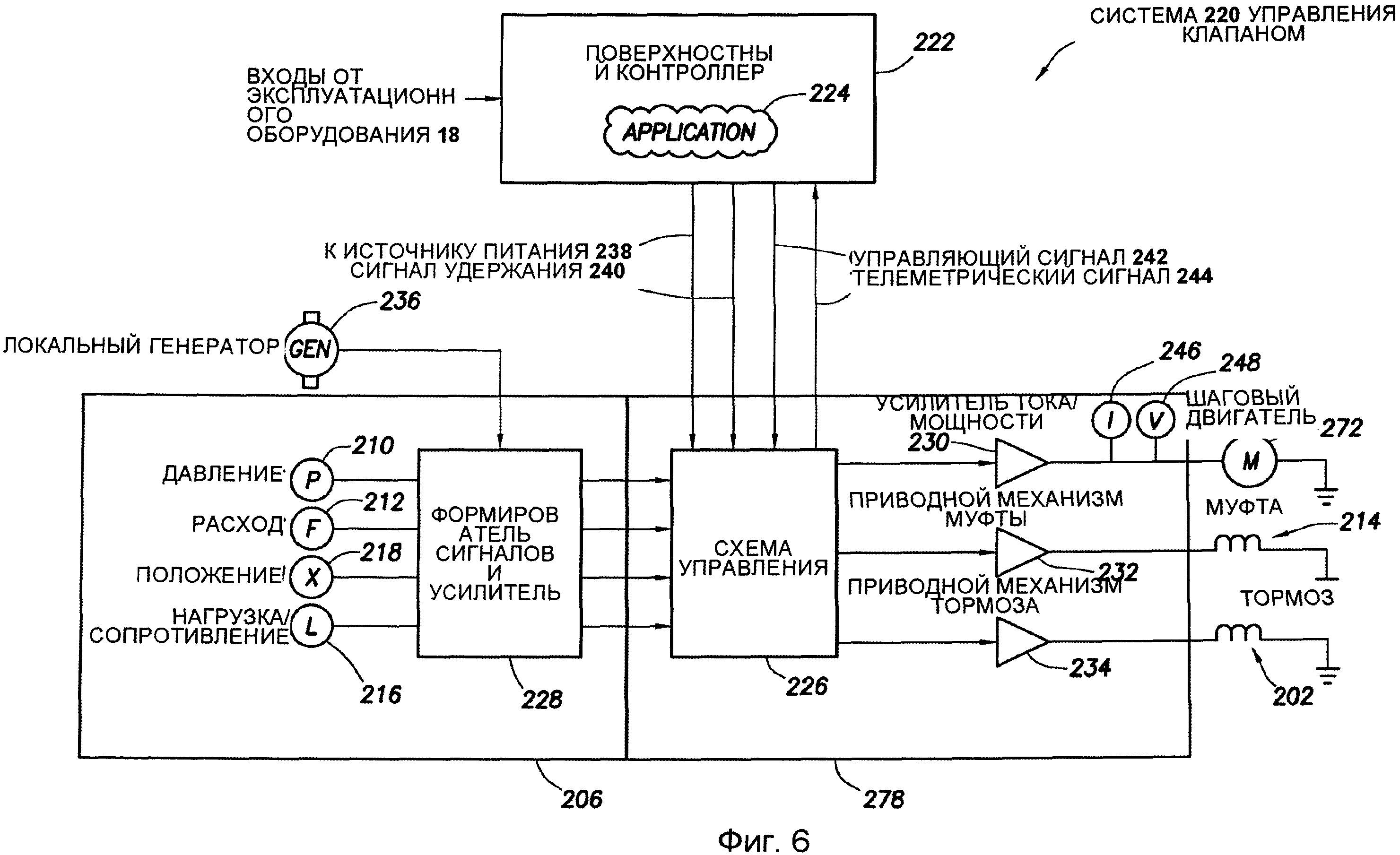
На фиг.6 изображена блок-схема системы управления для клапана 10, используемого в скважине. В дополнение к нескольким ранее указанным элементам (тормоз 202, блок 206 датчиков, датчик 210 давления, датчик 212 расхода, электромагнитная муфта 214, блок 216 датчика нагрузки, датчик 218 положения, шаговый двигатель 272 и локальный контроллер 278), на фиг.6 показано, что система 220 управления включает в себя поверхностный контроллер 222, программное обеспечение или приложение 224, схему 226 управления, формирователь сигналов 228, усилитель тока/мощности 230, приводной механизм 232 муфты, приводной механизм 234 тормоза, локальный генератор 236, поверхностный источник 238 питания, и каналы связи для сигнала удержания 240, один или несколько управляющих сигналов 242, один или несколько телеметрических сигналов 244. Кроме того, система 220 управления может включать в себя различные датчики 246 тока и различные датчики 248 напряжения.
Со ссылками на фиг.6, блок 206 датчиков расположен в клапане 10 или на нем. Блок 206 датчиков включает в себя или функционально связан с различными датчиками, в том числе, датчиком 210 давления, датчиком 212 расхода, блоком 216 датчика нагрузки, и датчиком 218 положения. Кроме того, блок 206 датчиков включает в себя формирователь сигналов 228 (который может включать в себя усилители и другие элементы). Кроме того, формирователь сигналов 228 получает сигналы от датчиков, формирует сигналы и передает их в локальный контроллер 278.
Со ссылкой на фиг.6, локальный контроллер 278 выполняет ряд функций.
Например, схема 226 управления здесь получает сформированные сигналы от формирователя сигналов 228, которые передают данные о давлении, расходе, положении модуля перекрытия канала, нагрузке или сопротивлении, для управления шаговым двигателем 272 (по мере определения блоком 216 датчика нагрузки) и другими текущими условиями работы клапана 10. Кроме того, схема 226 управления получает сигнал удержания 240 и другие управляющие сигналы 242 от поверхностного контроллера 222. Она также генерирует телеметрические сигналы 244 для поверхностного контроллера 222. Тогда как на фиг.6 показаны отдельные сигналы для поверхностного источника 238 питания, сигнала удержания 240, управляющих сигналов 242 и телеметрических сигналов 244, понятно, что эти сигналы могут передаваться по одной линии (см. линия 282 на фиг.3), коммуникационной шине, или по беспроводной связи или другим каналам связи, без отступления от объема настоящего изобретения.
Кроме того, под влиянием существующих эксплуатационных условий, связанных с клапаном 10, схема 226 управления генерирует управляющие сигналы, которые она передает усилителю тока/мощности 230, приводному механизму 232 муфты и приводному механизму 234 тормоза. Например, в некоторых ситуациях схема 226 управления может позиционировать модуль 46 перекрытия канала с помощью усилителя тока/мощности 230, включения или выключения муфты 214 через приводной механизм 232 муфты, и/или включать или выключать тормоз 202 через приводной механизм 234 тормоза. Локальный контроллер 278 (или даже поверхностный контроллер 222) также может определять, какое усилие приложить через шаговый двигатель 272 для позиционирования модуля 46 перекрытия канала, скорость позиционирования, а также может изменять связанные параметры и положения клапана 10.
Схема 226 управления и другие элементы блока 206 датчиков и локального контроллера 278 могут интегрироваться в ИС (интегральную микросхему), и ASIC (специализированную интегральную микросхему), или могут быть реализованы в аналоговой схеме. В качестве альтернативы или помимо этого, эти элементы могут быть реализованы в виде встроенного ПО или программы, запускаемой на процессоре или хранящейся в памяти. Схема 226 управления может содержать программное приложение, предназначенное для управления действием и контроля клапана или его элементов, или окружающей среды.
Со ссылкой на фиг.6, поверхностный контроллер 222 обычно содержит программное приложение 224, которое сконфигурировано для помощи в управлении клапаном 10. Однако поверхностный контроллер 222 может быть реализован в виде встроенного ПО или аналоговой или цифровой схемы, как указано выше со ссылкой на схему 226 управления. Кроме того, поверхностный контроллер 222 выполняет многочисленные функции для управления клапаном 10. Например, он получает входные сигналы от различных пользователей и программных приложений, схем и датчиков, связанных с эксплуатационным оборудованием 18. По этой информации и по телеметрическим сигналам 244 от локального контроллера 278, поверхностный контроллер 222 подает/отключает поверхностный источник 238 питания от клапана 10, подает/отключает сигнал удержания 238 от клапана 10, и может генерировать команды для позиционирования модуля 46 перекрытия канала и управлять электромагнитной муфтой 214 и тормозом 202. В действии, клапаны в различных вариантах воплощения как показано на фиг.1-6, могут контролироваться и управляться, как показано на блок-схеме, фиг.7.
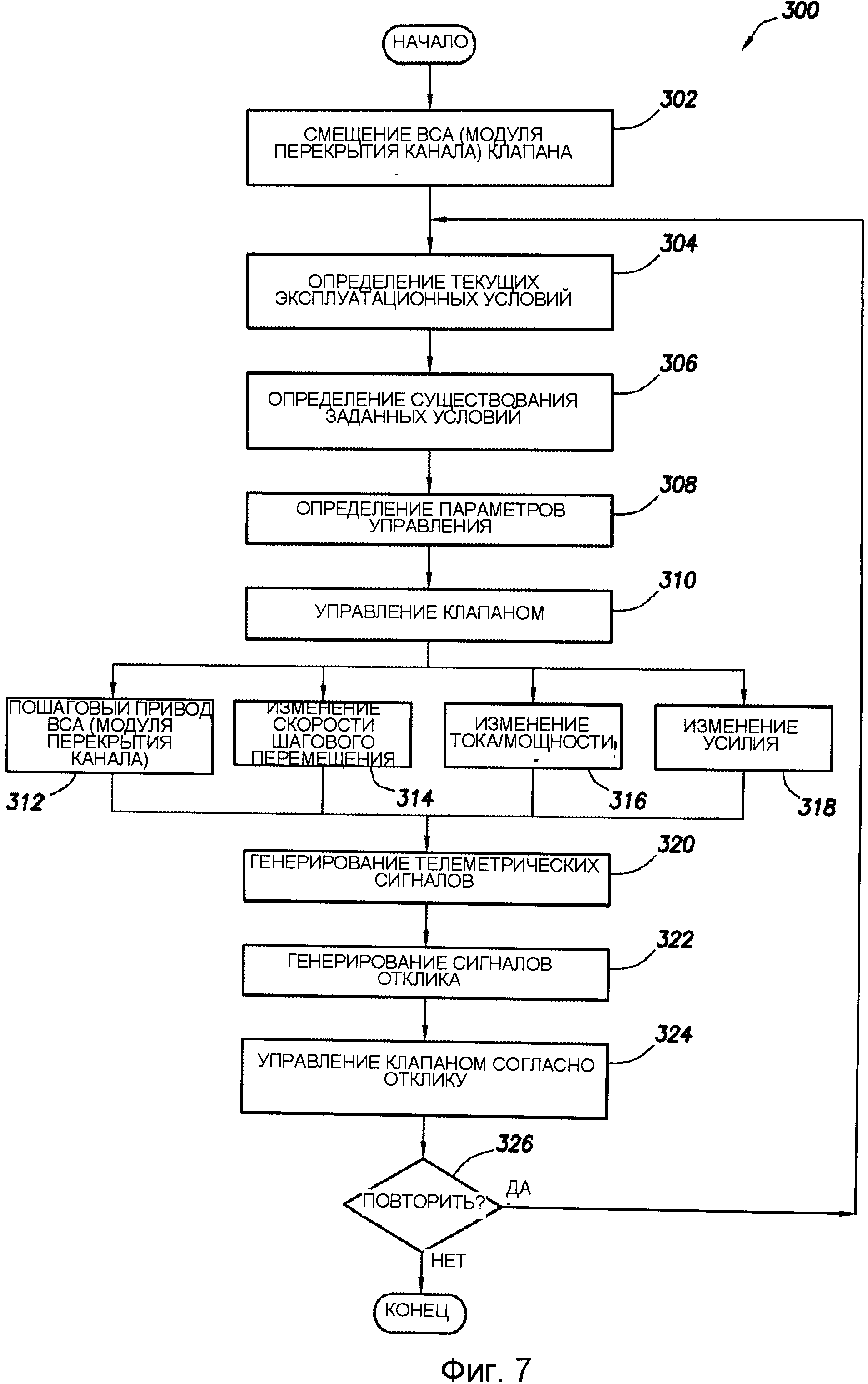
На фиг.7 показана блок-схема, иллюстрирующая способ управления клапаном 10 для использования в скважине. Способ 300 по настоящему варианту воплощения включает в себя смещение модуля 46 перекрытия канала клапана 10 в направлении положения, такого как закрытое положение. См. ссылку 302. В определенный момент, текущие условия эксплуатации клапана 10, эксплуатационной колонны 24 и/или эксплуатационного оборудования 18 определяются в условиях способа 300. Например, скважинное давление, скважинный расход, нагрузка или усилие, прилагаемое к механическому рычажному механизму 50, положение модуля 46 перекрытия канала, ток, подаваемый к шаговому двигателю 272, мощность, подаваемая к шаговому двигателю 272, сопротивление действию шагового двигателя 72 и т.д., могут определяться системой 200 управления. Кроме того, или в качестве альтернативы, входные данные от пользователя и/или эксплуатационного оборудования 18 могут приниматься и учитываться в условиях способа 300. См. ссылку 304.
Как еще один вариант воплощения, по способу системы регулирования потребления, система регулирования потребления включает в себя датчики, которые определяют входное напряжение в системе внутрискважинного управления, а система подводного управления изменяет линейное напряжение для того, чтобы в системе внутрискважинного управления было соответствующее напряжение.
Способ 300 также включает в себя определение того, существуют ли заданные условия, в виде реакции на воспринимаемые эксплуатационные условия. Например, по нему можно определять, будут ли текущие эксплуатационные условия в эксплуатационном оборудовании 18 или эксплуатационной колонне 24 указывать, что, возможно, желательно закрыть клапан 10. В качестве альтернативы, текущие эксплуатационные условия могут указывать, что было бы желательно изменить расход углеводородов через клапан 10 или давление на стороне впуска клапана 10. См. ссылку 306.
Если текущие условия эксплуатации показывают, что, возможно, желательно изменение положения модуля 46 перекрытия канала, может потребоваться ряд параметров, связанных с приведением модуля 46 перекрытия каналов в новое положение. Например, поскольку шаговый двигатель 272 позволяет задавать усилие, развиваемое (и контролируемое) им, это усилие можно определить по опорному сигналу 308. Кроме того, также может быть определена скорость шагового перемещения шагового двигателя 272. В результате клапаном 10 можно управлять в соответствии с определяемыми параметрами. См. ссылку 310. Конкретнее, может возникнуть необходимость пошагово привести модуль 46 перекрытия канала в новое положение. Таким образом, чтобы выполнять пошаговый привод модуля 46 перекрытия канала в новое положение, можно выбирать количество шагов для шагового двигателя 272. См. ссылку 312.
В качестве альтернативы или помимо этого, возможно, понадобится привести в движение модуль 46 перекрытия канала с некоторой желаемой скоростью. Тогда можно определить скорость шагового перемещения шагового двигателя 272 (соответствующую желаемой скорости). Кроме того, в условиях способа 300 скорость шагового перемещения и скорость модуля 46 перекрытия канала может изменяться. Например, в начальной стадии перемещения модуля 46 перекрытия канала, скорость шагового перемещения и скорость может быть сравнительно высокой, чтобы клапан 10 начинал закрываться быстро. Таким образом, если нужно закрыть скважину, поток углеводородов из зоны 34 накопления углеводородов (см. фиг.1) можно замедлить (и остановить) с минимальной задержкой. Затем, на следующем этапе перемещения, скорость шагового перемещения и скорость модуля перекрытия канала можно понизить. В то время как по ряду причин скорость шагового перемещения может изменяться, замедление скорости шагового перемещения в конце перемещения (особенно для полностью открытого или полностью закрытого положения) поможет избежать соударения седла 68 заслонки с заслонкой 52. Таким образом, модуль 46 перекрытия канала может закрываться менее чем за примерно 5 секунд (или в течение несколько отличающегося периода времени). Таким образом, ссылка 314 показывает, что скорость шагового перемещения и скорость модуля 46 перекрытия канала может изменяться.
Ссылка 316, фиг.7, показывает, что усилие, прилагаемое к механическому рычажному механизму 50 шаговым двигателем 272, может быть изменяемым. В частности, поскольку усилие (например, вращающий момент), прилагаемое шаговым двигателем 272, можно задавать, изменяя ток, который приводит в действие шаговый двигатель 272 в процессе его шагового вращения, это усилие можно регулировать. Таким образом, во время начальной стадии перемещения модуля 46 перекрытия канала, усилие, прилагаемое к механическому рычажному механизму, можно устанавливать на один уровень. Затем, в процессе следующей стадии перемещения, усилие можно установить на другой уровень, более высокий или более низкий. Конечно, усилие может изменяться другим способом, в зависимости от потребностей пользователя.
Кроме того, или в качестве альтернативы, ток и/или мощность, подаваемая к шаговому двигателю 272, может изменяться, например, для регулирования количества тепла, выделяющегося в проводе 282 и/или в других местах скважины. Ток или мощность, подаваемая к шаговому двигателю 272, может изменяться по другим причинам, включая управление количеством внутрискважинной мощности, доступной для других целей, без отступления от объема изобретения. Таким образом, усилитель 230 тока/мощности может быть изменяемым источником тока/мощности, управляемым с помощью изменяющегося со временем сигнала от схемы 226 управления. См. ссылку 318.
С заданным интервалом, или при обнаружении одного или нескольких заданных условий, схема 226 управления может генерировать телеметрический сигнал 244 к поверхностному контроллеру 222. Телеметрический(-е) сигнал(-ы) 244 могут передавать данные об эксплуатационных условиях, определяемых датчиком 210 давления, датчиком 212 расхода, блоком 216 датчика нагрузки, датчиком 218 положения и т.д. Кроме того, телеметрический сигнал 244 может содержать другие данные, такие как, помимо прочего, мощность и ток, подаваемый к шаговому двигателю 272, определяемый датчиками 246 и 248 тока и напряжения, состояние муфты 214 (включена или выключена), состояние тормоза 202 (включен или выключен), данные об обнаружении сигнала удержания 240 и другие рабочие параметры клапана 10 (конкретнее, локального контроллера 278). См. ссылку 320.
Поверхностный контроллер 222 может получать телеметрические сигналы 244 и определять, желательно ли применять действия по управлению. Кроме того, поверхностный контроллер 222 может получать входные данные от пользователя и эксплуатационного оборудования 18 и, в соответствии с функциями приложения 224, постоянно хранимого в поверхностном контроллере 222, может генерировать ответный телеметрический сигнал 244. Этот ответный сигнал может принимать форму одного или нескольких управляющих сигналов 242, которые направляются в локальный контроллер 278. Кроме того, ответный сигнал может включать отправление данных в телеметрическом сигнале 244, или происходящих из него, в эксплуатационное оборудование 18 для хранения или дальнейшей обработки. В некоторых вариантах воплощения, если локальный контроллер 278 не может получать управляющие сигналы 242 в заранее определенное время, локальный контроллер 278 может выполнять инструкции, или в противном случае, некоторый заранее определенный ряд действий по управлению. Таким образом, локальный контроллер 278 и поверхностный контроллер 222 могут «перебрасывать информацию» друг другу или выполнять протокол взаимной идентификации. См. ссылку 322. С дальнейшими ссылками на фиг.7, способ 300 по настоящему варианту воплощения также включает в себя управление клапаном 10 в соответствии с управляющим сигналом 242, или его отсутствием. См. ссылку 324.
При необходимости способ 300, целиком или частично, может быть повторен, как указано в ссылке 326. В противном случае способ 300 может быть остановлен.
Конкретнее, клапаны в ряде вариантов воплощения включают в себя электронику на (или в) клапанах, или как встроенные элементы, или как элементы, установленные на клапанах. Эти элементы включают в себя внутренние датчики, используемые системой управления для контроля и управления клапанами с опорой (или без нее) на элементы управления на поверхности. Кроме того, с той же целью система управления может использовать датчики, внешние по отношению к клапану. Кроме того, в дополнение к датчикам для контроля механического действия клапанов, последние включают в себя датчики для контроля электронных элементов систем управления. В ряде вариантов воплощения клапаны и/или их системы управления снабжены множеством датчиков, включающих, помимо прочего, датчики давления, датчики расхода, датчики температуры, датчики вибрации, датчики электрического тока и датчики напряжения в различных комбинациях. В результате варианты воплощения улучшают управление механическими и электрическими характеристиками клапанов. Улучшенные диагностические возможности также вытекают из различных вариантов воплощения клапанов, систем управления и способов.
В одном варианте воплощения электрическим исполнительным механизмом клапана управляет шаговый двигатель. Количество шагов (или импульсов с выбранным уровнем тока и напряжения) шагового двигателя для выполнения команды определяется на основе параметров, отображающих условия работы клапана, скважины, связанного эксплуатационного оборудования и др. В качестве альтернативы или помимо этого, клапан может быть оснащен двигателем постоянного тока (DC), к которому подается питание с заданным током и напряжением. Например, клапан может включать двигатель такого типа, как описано ранее. Независимо от типа двигателя, включенного в клапан, система управления управляет двигателем для привода в движение клапана с постоянным выходным усилием, основанным на вращающем моменте двигателя, передаточном числе, механизмах привода (например, шариковый винт) и др. В ряде ситуаций система управления изменяет выходное усилие на основании измерений характеристик клапана (а также системы управления). Например, ток, подаваемый к двигателю, может увеличивать или уменьшать момент вращения двигателя и, следовательно, выходное усилие исполнительного механизма. В ряде вариантов воплощения, измерения и результирующие действия по управлению происходят либо постоянно, с перерывами, либо периодически. Эти измерения и действия по управлению могут происходить в заранее выбранных положениях рабочего хода клапана, или вблизи них (т.е. рабочего хода исполнительного механизма или механического рычажного механизма клапана). Кроме того, или в качестве альтернативы, система управления может давать пользователю возможность управлять действием клапана.
Клапанами, оснащенными шаговыми двигателями, можно управлять, используя постоянную или последовательную очередность шагов (или электрических импульсов). Например, шаги могут увеличиваться или уменьшаться по шаговой или ступенчатой схеме, или они могут нарастать или спадать с заданными скоростями. Одно из преимуществ, возникающих из таких функциональных сценариев, включает запуск двигателя при меньшей мощности, если сопротивление приведению в действие клапана низкое, и запуск его при большей мощности, если сопротивление высокое.
Варианты воплощения, кроме того, дают возможность использования характеристик большинства шаговых двигателей, в шаговых двигателях, обеспечивающих больший момент вращения при меньших скоростях, чем при более высоких скоростях. Функционирование клапанов согласно этим вариантам воплощения можно оптимизировать в соответствии с их временем срабатывания (в направлении открывания или закрывания, или в обоих направлениях), регулируя скорости двигателя по ступенчатым или линейно изменяющимся схемам. Таким образом, чтобы обеспечить синхронизацию выходов двигателей с нагрузкой на двигатели, развивающейся в результате приведения в действие клапанов, скорости и моменты вращения шаговых двигателей можно оптимизировать. В некоторых вариантах воплощения эти выходные усилия поддерживаются высокими в заданных пределах, сверх нагрузок клапана. Кроме того, системы управления могут изменять эти пределы на основании эксплуатационных условий или других выходных данных.
Другие параметры клапанов в различных вариантах воплощения связаны с потреблением мощности. Например, в традиционных клапанах питание подводится с поверхности к клапанам при постоянных уровнях. В результате различные элементы, находящиеся вверх и вниз по стволу скважины должны иметь увеличенный запас для работы с избыточной мощностью даже в то время, когда клапанами устанавливаются более низкие уровни мощности. Напротив, системы управления по вариантам воплощения контролируют потребление мощности клапанами с помощью внутрискважинной электроники, логических схем, электрических схем и т.д. и регулируют мощность, выделяемую клапанам на основе существующих эксплуатационных условий (таких как мощность, требуемая клапанами). Поэтому, согласно такому варианту воплощения, эти системы управления подают различные количества мощности к внутрискважинной электронике, связанной с клапанами. В результате системы управления подают только мощность, необходимую клапанам для их функционирования, таким образом, обеспечивая оптимизацию элементов, находящихся вверх и вниз по стволу скважины, для точного управления потреблением мощности и сопутствующим выделением тепла.
Кроме того, клапаны в различных вариантах воплощения включают в себя логические схемы для выполнения функций, раскрываемых здесь, и для обеспечения телеметрических сигналов, передающих данные, связанные с клапанами, к электронике выше по скважине, связанной с этими клапанами. Электроника выше по скважине может реагировать на телеметрические сигналы в заданных временных рамках (то есть электроника выше по скважине может «перебрасывать информацию» или выполнять протокол взаимной идентификации с клапанами). Если клапаны неспособны принять сигнал отклика в течение соответствующего времени, внутрискважинная электроника клапанов может выполнять ряд команд, соответственно. Например, внутрискважинная электроника может закрывать клапаны или позволять клапанам закрываться, если они так настроены (даже при отсутствии питания). Однако другие команды, действия по диагностике и др. могут выполняться внутрискважинной электроникой.
Таким образом, клапаны по вариантам воплощения можно оптимизировать при применении, для которого они предназначены. Конечно, функции таких клапанов можно перенастроить на месте, путем изменения соответствующих схем управления. Кроме того, клапаны по различным вариантам воплощения действуют более эффективно и с большей надежностью, обладают более длительным ресурсом и менее дороги в эксплуатации, чем было возможно ранее.
Хотя сущность изобретения была описана на языке, характерном для структурных особенностей и/или методологических действий, следует понимать, что сущность изобретения, определенная в прилагаемой формуле изобретения, необязательно ограничивается характерными особенностями или действиями, описанными выше. Скорее, характерные особенности и действия, описанные выше, раскрыты в качестве иллюстративной формы реализации формулы изобретения.
Реферат
Группа изобретений относится к горному делу и может быть применена в скважинной клапанной системе. Клапан включает корпус, модуль перекрытия канала, механический рычажный механизм, модуль привода и блок управления. В корпусе выполнен канал для текучей среды, протекающей, когда модуль перекрытия канала находится в открытом положении. Когда модуль перекрытия канала находится в закрытом положении, модуль перекрытия канала предотвращает пропускание текучей среды через канал. Механический рычажный механизм функционально связан с модулем перекрытия канала и с модулем привода. Главный блок управления определяет усилие, прилагаемое к механическому рычажному механизму на основании текущего эксплуатационного состояния клапана и вынуждает модуль привода прилагать заданное усилие к механическому рычажному механизму. В результате механический рычажный механизм приводит в действие модуль перекрытия канала. Технический результат заключается в повышении эффективности скважинной клапанной системы. 2 н. и 18 з.п. ф-лы, 7 ил.
Формула
определение существующего эксплуатационного состояния клапана, содержащего: корпус клапана с выполненным каналом для пропускания через него текучей среды, модуль перекрытия канала, перемещаемый между открытым положением, в котором модуль перекрытия канала обеспечивает пропускание текучей среды через канал, и закрытым положением, в котором модуль перекрытия канала предотвращает пропускание текущей среды через канал, механический рычажный механизм, функционально связанный с модулем перекрытия канала, и модуль привода, функционально связанный с механическим рычажным механизмом; определяющий усилие, на основании определяемых эксплуатационных условий; и приводящий в действие модуль перекрытия канала с заданным усилием.
Комментарии