Мобильное устройство визуального обнаружения дефектов рельсового пути - RU190003U1
Код документа: RU190003U1
Чертежи


Описание
Полезная модель относится к области техники контроля рельсового пути и может использоваться в устройствах визуального обнаружения дефектов рельсов и других элементов рельсового пути железнодорожного транспорта, метрополитена и трамвая.
Проверка соответствия рельсового пути требованиям безопасной эксплуатации подвижного состава включает в себя как одну из основных составляющих визуальную дефектоскопию. Целый ряд дефектов рельсового пути обнаруживается исключительно визуальным контролем. Например, только визуально могут быть выявлены такие дефекты как отслоение и выкрашивание металла на поверхности катания головки рельсов, выкрашивание металла на боковой рабочей выкружке головки рельсов, пробуксовка рельсов колесами локомотива, смятие головки рельсов, повреждения сварных стыков, наличие посторонних предметов на рельсовом пути и др.
Известные устройства визуального обнаружения дефектов включают средство визуального наблюдения и средство подсветки. Известно, например, устройство для поиска поверхностных аномалий, которое может использоваться для визуальной дефектоскопии рельсов, содержащее средство визуального наблюдения, окруженное несколькими источниками подсветки, подключенными к блоку их поочередного включения в автоматическом режиме или по командам оператора, с обеспечением возможности просмотра в косых лучах (RU 152858 U1, 2015). Использование боковой подсветки повышает качество визуального поиска поверхностных дефектов рельсов. Однако это устройство недостаточно эффективно для обнаружения других дефектов рельсового пути. Кроме того, это устройство не является мобильным. Поэтому оно малоэффективно в эксплуатации.
Наиболее близким к предложенному является мобильное устройство визуального обнаружения дефектов рельсового пути, содержащее размещенные на несущей раме транспортного средства узел видеонаблюдения и узел освещения, связанные с размещенным в транспортном средстве блоком управления (RU 2642687 С1, 2018). В качестве транспортного средства могут быть использованы дефектоскопная тележка, вагон-дефектоскоп, автомотриса, автомобиль-дефектоскоп на комбинированном ходу. В качестве узла видеонаблюдения использована одна видеокамера. В качестве узла освещения использованы несколько световых источников, например, в виде светодиодных осветителей, расположенных под разными углами к зоне обзора и включаемых посредством коммутатора последовательно на короткое время открытия затвора видеокамеры. Это устройство является мобильным и может использоваться для контроля состояния рельсового пути, но оно эффективно лишь для обнаружения микротрещин на поверхности катания рельсов за счет подсветки под разными углами. Обнаружение дефектов рельсового пути широкой номенклатуры таким устройством ограничено, в том числе из-за малых полей видеообзора и освещения. При высоких скоростях передвижения достоверность обнаружения визуально выявляемых дефектов этим устройством резко снижается. Поэтому это устройство не обладает высокой эксплуатационной эффективностью.
Техническая проблема, решаемая полезной моделью, заключается в создании мобильного устройства визуального обнаружения дефектов рельсового пути, лишенного недостатков прототипа. Технический результат, обеспечиваемый полезной моделью, состоит в повышении эксплуатационной эффективности мобильного устройства визуального обнаружения дефектов рельсового пути, в том числе за счет расширения номенклатуры визуально выявляемых этим устройством дефектов и повышения достоверности их обнаружения.
Это достигается тем, что в мобильном устройстве визуального обнаружения дефектов рельсового пути, содержащем размещенные на несущей раме транспортного средства узел видеонаблюдения и узел освещения, связанные с размещенным в транспортном средстве блоком управления, узел видеонаблюдения выполнен в виде электронных оптических блоков, расположенных вдоль перпендикулярной рельсовому пути оси, узел освещения подключен к блоку управления через первый контактор и выполнен в виде двух линейных осветителей, каждый из которых расположен по одну из сторон электронных оптических блоков параллельно этой оси, а количество электронных оптических блоков, угол их наклона по отношению к рельсовому пути и длина линейных осветителей выбраны из условия обеспечения возможности полного перекрытия зоны видеообзора рельсошпальной решетки, при этом в устройство введены связанный с блоком управления синхронизатор, связанный с электронными оптическими блоками сервер и подключенный к блоку управления через второй контактор узел обдува. Каждый из электронных оптических блоков может быть выполнен в виде размещенной в корпусе видеокамеры линейного сканирования с широкоугольным объективом. Количество оптических блоков может составлять от двух до шести. Каждый из линейных осветителей может быть выполнен на основе светодиодов с длиной волны светового потока, соответствующей максимальной чувствительности матрицы электронных оптических блоков на той же длине волны. Длина каждого из линейных осветителей может быть выбрана равной ширине транспортного средства. Узел обдува может быть выполнен в виде снабженных воздушным фильтром вентиляторов со шлангами, расположенными с обеспечением возможности обдува оптических элементов электронных оптических блоков.
Указанный технический результат обеспечивается в рамках реализации назначения всей представленной в независимом пункте формулы заявленной полезной модели совокупностью существенных признаков, каждый признак которой необходим, а вместе они достаточны для решения указанной технической проблемы и для достижения указанного технического результата. Предложенное мобильное устройство визуального обнаружения дефектов рельсового пути представляет собой одно устройство, узлы и блоки которого, характеризуемые соответствующими существенными признаками, находятся в конструктивном единстве и функционально взаимосвязаны. При функционировании устройства они работают одновременно, создаваемые ими эффекты взаимосвязаны и отсутствие хотя бы одного из них привело бы к потере указанного технического результата. Их совместное использование привело к созданию нового устройства с указанным техническим результатом. При изготовлении устройства они размещаются и соединяются посредством сборочных операций в единой конструктивной базе.
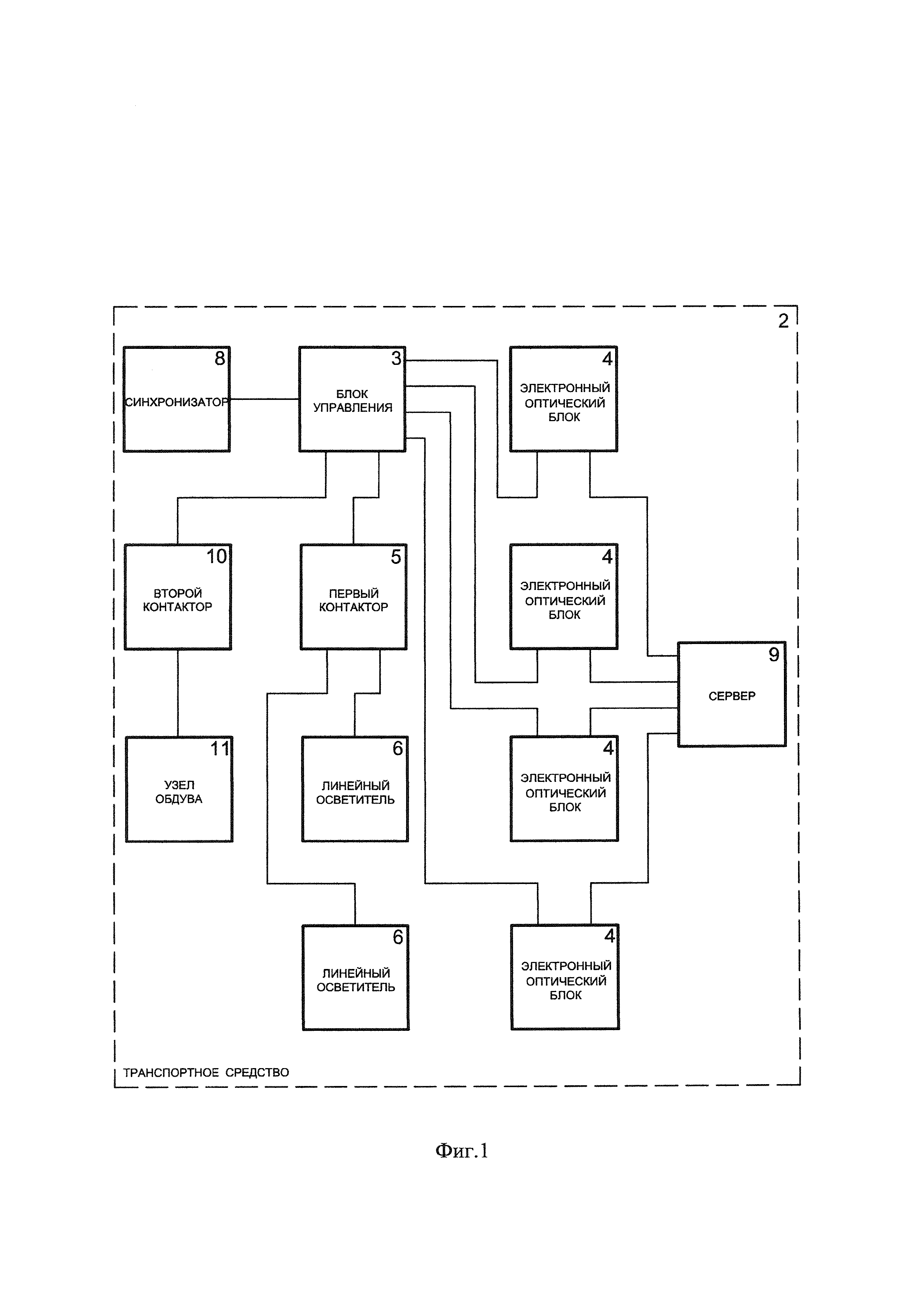
На фиг. 1 показана структурная блок-схема предложенного мобильного устройства. На фиг. 2 показан общий вид размещения электронных оптических блоков и линейных осветителей на несущей раме (без узла обдува). На фиг. 3 показан вариант оптической схемы визуального обнаружения дефектов.
Мобильное устройство визуального обнаружения дефектов рельсового пути содержит размещенные на несущей раме 1 транспортного средства 2, например, подвижной единицы в виде вагона-дефектоскопа, узел видеонаблюдения и узел освещения, связанные с размещенным в транспортном средстве 2 блоком 3 управления. Несущая рама 1 может быть выполнена сплошной или составной. Узел видеонаблюдения выполнен в виде оптических блоков 4, расположенных вдоль перпендикулярной рельсовому пути оси. Каждый из электронных оптических блоков 4 выполнен преимущественно в виде размещенной в корпусе видеокамеры линейного сканирования с широкоугольным объективом. Узел освещения подключен к блоку 3 управления через первый контактор 5 и выполнен в виде двух линейных осветителей 6. Каждый из линейных осветителей 6 расположен по одну из сторон электронных оптических блоков 4 и выполнен преимущественно на основе светодиодов с длиной волны светового потока, соответствующей максимальной чувствительности матрицы электронных оптических блоков 4 на той же длине волны, преимущественно 450 нм. Количество электронных оптических блоков 4, угол их наклона по отношению к рельсовому пути и длина линейных осветителей 6 выбраны из условия обеспечения возможности полного перекрытия зоны видеообзора рельсошпальной решетки 7. Количество электронных оптических блоков 4 составляет преимущественно от двух до шести, например, четыре. Угол наклона электронных оптических блоков 4 по отношению к рельсовому пути составляет, например, в случае четырех электронных оптических блоков 4 угол 30° (фиг. 3). Длина каждого из линейных осветителей 6 выбрана преимущественно равной ширине транспортного средства 2, при этом на их концах светодиоды могут быть снабжены оптическими линзами (на чертежах не показано). Мобильное устройство содержит также связанный с блоком 3 управления синхронизатор 8, связанный с электронными оптическими блоками 4 сервер 9 и подключенный к блоку 3 управления через второй контактор 10 узел 11 обдува. Ко входу синхронизатора 8 может быть подключен датчик пути и скорости, а также ультразвуковые и магнитные дефектоскопы (на чертежах не показано). Узел 11 обдува выполнен преимущественно в виде снабженных воздушным фильтром вентиляторов в количестве, например, двух, со шлангами, расположенными с обеспечением возможности обдува оптических элементов электронных оптических блоков 4 (на чертежах не показано). Устройство снабжено также соответствующими блоками электропитания (на чертежах не показано).
При движении транспортного средства происходит непрерывная линейная видеосъемка рельсового пути по всей его ширине посредством электронных оптических блоков 4. Освещение зоны видеообзора рельсошпальной решетки обеспечивается посредством двух линейных осветителей 6. Выбор в качестве узла видеонаблюдения электронных оптических блоков 4 позволяет подобрать наиболее оптимальные условия согласования параметров светового потока с чувствительностью их матрицы, что эффективно реализуется при использовании видеокамер линейного сканирования. Выбор в качестве узла освещения линейных осветителей 6 и размещение каждого из них по одну из сторон линейки электронных оптических блоков 4 наиболее эффективно для обеспечения высокого и равнозначного качества получаемого изображения при любых погодных условиях - в условиях солнечной и пасмурной погоды и в ночное время. Для регистрации изображения рельсошпальной решетки используется режим синхронной видеорегистрации, который может быть привязан к путейской координате, а также и к данным ультразвуковой и магнитной дефектоскопии. Синхронизатор 8 обеспечивает синхронную съемку видеоряда с разрешением, например, 1 мм на пиксель. При подключении к синхронизатору 8 датчика пути и скорости, в нем вырабатываются информационно привязанные к пути импульсные сигналы, которые через блок 3 управления поступают на все электронные оптические блоки 4 с дискретизацией 1 мм по длине пути. Синхронизация электронных оптических блоков 4 между собой позволяет получать синхронизированную картину со всех камер одновременно, что дает общую картину с разных электронных оптических блоков 4. Блок 3 управления обеспечивает распределение сигналов от синхронизатора 8, автоматическое управление электронными оптическими блоками 4 (в том числе управление их обогревом), контроль и подсчет синхроимпульсов от синхронизатора 8, выработку команд на первый контактор 5, подключающий линейные осветители 6, и на второй контактор 10, подключающий узел 11 обдува. Сервер 9 обеспечивает сбор данных с электронных оптических блоков 4, накопление, хранение и обработку получаемой информации для автоматизированного анализа получаемых изображений. Преимущественное количество электронных оптических блоков 4 составляет четыре, что достаточно для видеорегистрации всех основных выявляемых визуально дефектов рельсового пути, в том числе трещин на поверхности катания рельсов, смятия в стыках, отслоений и выкрашивания металла рельсов на поверхности катания, в том числе в зоне стыков, боксовин, повреждений сварных стыков, боковых ступенек в стыках рельсов, забега стыковых зазоров по двум нитям пути, пробуксовку рельсов, отсутствие или повреждение скрепления, наличие посторонних предметов на или около рельсов и др. За счет подбора широкоугольных объективов видеокамер может быть получена картина по всей ширине верхнего строения пути от одного до другого торца шпал. Это же дает увеличение количества электронных оптических блоков 4 до пяти или шести. Эффективность работы устройства повышает наличие узла 11 обдува, который обеспечивает защиту оптических стекол электронных оптических блоков 4 во время движения транспортного средства от воздействия внешних факторов, таких как атмосферные осадки и пыль. Такое выполнение устройства позволяет осуществлять в автоматизированном режиме видеосъемку высокого качества при времени экспозиции до нескольких микросекунд на высокой скорости передвижения до 250 км/час, при этом обеспечивается достоверное (надежное) обнаружение любых визуально выявляемых дефектов рельсового пути по всей ширине рельсошпальной решетки. Это обеспечивает высокую эксплуатационную эффективность мобильного устройства визуального обнаружения дефектов рельсового пути.
Пример реализации. Полезная модель реализована в виде мобильного устройства визуального обнаружения дефектов рельсового пути по техническим условиям ВДМА.663500.149 ТУ, в качестве транспортного средства 2 которого использован диагностический вагон «СПРИНТЕР» (АО «Фирма ТВЕМА»). В подвагонном пространстве на поперечной части несущей рамы 1 размещены четыре расположенные в корпусах линейные видеокамеры модели LAGM-02K08A (компания Teledyne DALSA, Канада) с интерфейсом GigE, имеющие частоту линий не менее 60 кГц и разрешение не менее 1024 пк, и два линейных осветителя 6 длиной, равной ширине несущей рамы 1 (соответствующей ширине вагона), на основе мощных светодиодов холодного свечения модели XTEAWT-00-000-000000H50 (компания Сrее, США), имеющих температуру свечения 6200 K, угол излучения 115° и длину волны 450 нм. Видеокамеры снабжены широкоугольными объективами. Угол наклона видеокамер по отношению к рельсовому пути составляет 30°, расстояние от их объективов вдоль продольной оси до рельсошпальной решетки - 528 мм. В качестве блока 3 управления использован IBM PC совмест. ПК с операционной системой Windows и программным обеспечением «ИНТЕГРАЛ» (АО «Фирма ТВЕМА»). Сервер 9 выполнен в виде специализированного серверного компьютера Line Video, использующего интерфейс Gigabit Ethernet. Ко входу синхронизатора 8 подключен датчик пути и скорости, размещенный на буксе колесной пары вагона. Узел обдува 11 включает два снабженных фильтрами радиальных вентилятора типа Elektror RE 16 (компания Elektror, Германия). Испытания подтвердили высокую эксплуатационную эффективность устройства. Обеспечивается достоверное обнаружение любых визуально выявляемых дефектов рельсового пути по всей ширине рельсошпальных решеток при транспортных скоростях до 250 км/час. При этом не зафиксировано пропусков визуально выявляемых идентифицированных дефектов.
Мобильное устройство визуального обнаружения дефектов рельсового пути, выполненное в соответствии с полезной моделью, обладает более высокой эксплуатационной эффективностью по сравнению с аналогичными известными. Оно позволяет достоверно обнаруживать различные визуально выявляемые дефекты рельсового пути, в том числе широкую номенклатуру дефектов рельсов и других элементов рельсошпальных решеток по всей их ширине, на высоких скоростях транспортного средства.
Реферат
Использование: для контроля рельсового пути. Сущность полезной модели заключается в том, что мобильное устройство визуального обнаружения дефектов рельсового пути содержит размещенные на несущей раме (1) транспортного средства узел видеонаблюдения и узел освещения, связанные с размещенным в транспортном средстве блоком управления. Узел видеонаблюдения выполнен в виде электронных оптических блоков (4), расположенных вдоль перпендикулярной рельсовому пути оси. Узел освещения подключен к блоку управления через первый контактор и выполнен в виде двух линейных осветителей (6), каждый из которых расположен по одну из сторон электронных оптических блоков (4) параллельно этой оси. Количество электронных оптических блоков (4), угол их наклона к рельсовому пути и длина линейных осветителей выбраны из условия обеспечения возможности полного перекрытия зоны видеообзора рельсошпальной решетки. В мобильное устройство введены связанный с блоком управления синхронизатор, связанный с электронными оптическими блоками сервер и подключенный к блоку управления через второй контактор узел обдува. Технический результат: повышение эксплуатационной эффективности мобильного устройства визуального обнаружения дефектов рельсового пути. 5 з.п.ф-лы. 1 ил.
Формула
Документы, цитированные в отчёте о поиске
Способ комплексной диагностики рельсов
Комментарии