Устройство для ввода датчиков в расплав - SU1249378A1
Код документа: SU1249378A1
Чертежи
Описание
1
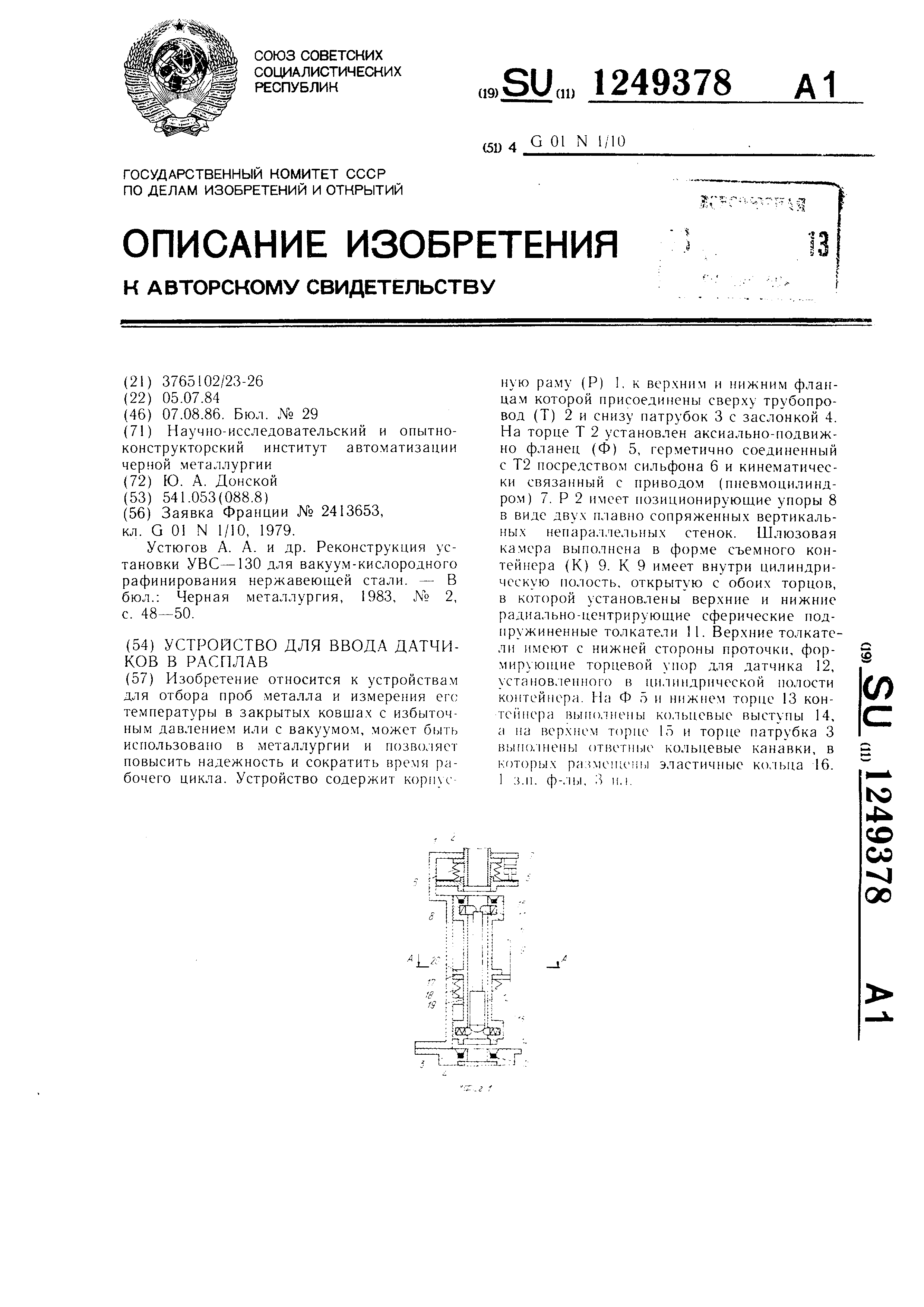
Изобретение относится к металлургии, а именно к области контроля химического состава расплава стали в закрытых KOBUiax, и может быть использовано для отбора проб металла и измерения его температуры в закрытых ковшах с избыточным давлением или с вакуумом.
Цель изобретения новьипение надежности устройства и coKpanieFHie времени )абочего цикла.
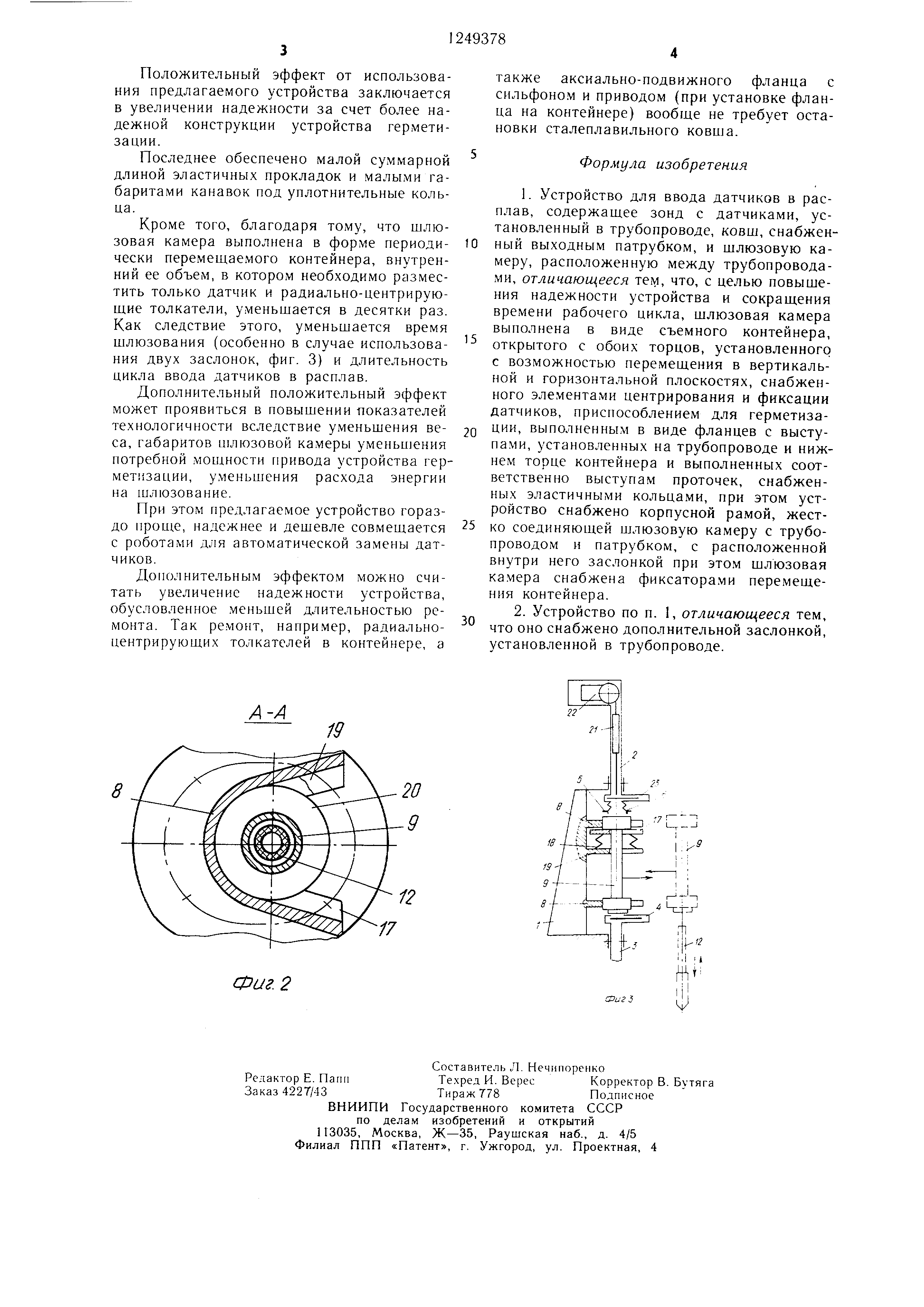
На фиг. 1 показано устройство д.чя гйюда датчиков в расплав (шлюзовая камера в форме съемного контейнера находится в no;io- женни «исходное ; известные по ана. зон и механизм его перемепц ння не показаны ), обилий вид; на фиг. 2 -- разрез .-А на фиг. 1; на фиг. 3 - обн.1ая кине.матичес- кая ехема устройства, 1нтриховой линией показан контейнер в положении «замена датчиков .
С фланцами (верхним и нижним) корпусной рам1)1 1 жестко соединены сверху трубопровод 2 и снизу патрубок 3 с заслонкой 4. На торце трубопровода устапов-лен аксиально-подвижно фланец 5, герметично соединенный с трубопроводом нри помощи сильфона (5 и ки11ематически связанный с приводом (нневмоцилиндром) 7.
Рама нмеет нознциоЕ1иру1ОШие упорь; 8, представляющие еобой две плавно еопря- женных вертикальных ненараллельных стенки . Шлюзовая каме|)а выполнена в форме С1 емцого контейнера 9.
Контейнер имеет внутри цилиндрическую полоеть, открытую с обоих торцов, в которой установлены верхние и нижние радиаль- но-центрирующие сферические то:1кателн 10, нодпружиненные пружинами 11. Верхние толкатели имеют с нижней сторош 1 проточки , формирующие торцевой упор для датчика 12, устаповленпого в цилиндрической полости контейнера. На фланце 5 и на ниж- не.м торце 13 контейнера выполнены кольцевые выступы 14 (выстун обозначен только на контейнере), а на верхнем торце 13 кон- TeiiHepa 9 и на торце патрубка 3 выпо.лнен1 1 OTBeTHbjie кольцевые канавки, в которых раз- .ме1цены эластичные кольца 16.
Осевое позиционирование обеснечивает- ся аксиально-подвижным уноро.м 17, подпружиненным пружина.ми 18, опирающимися на горизонтальное ребро 19 рамы. Контейнер 9 удерживается на аксиально-подвижном упоре кольцевым ребрам 20 или нижней торцовой нлон1,адкой, выполненной на од- но.м из ег О торцов (фиг. 3).
На фиг. 3 ноказаны зонд 21. кинематически связанный с лебедкой 22, и заслонка 23 на канале зонда. Полости каналов зонда и ковша могут быть постоянно соединены (не показано).
Позиционируюп1ие (в радиальном на- иравлении) упоры 8 здесь вьшолнены в форме двух горизонтальных ребер на вертикальной стенке рамы 1.
Устройство работает следуюши.м образом .
При включении пнев.моцилиндра 7 фланец 5 перемен1ается вниз, растягивая силь- фон 6, и (noc:ie контакта) пере. вниз коптейпер 9 и упор 17, сжимая пружины 18. При этом кольцевые выступы 14 (на фланце 5 и на нижнем торце 13 контейнера) входят в прилегающие кольцевые канавки и обжимают э.ластнчпые кольца 16, гер.мети- зируя впутрепние по.лости контейнера и трубопровода 2 (на (})иг. 3 герметизируется To. ibKO контейнер).
Затем известными системами (не ноказаны ) нроизводят 1н;1юзование, выравнивая давление сверху и снизу от заслонки 4.
Затем (фиг. 3) открывают заслонки 4 и 23 (или только заслонку 4; фиг. 1) и лебедкой 22 опускают зонд 21. Нри этом происходит сначала соединение зонда с датчиком 12, затем, когда осевое уеилие зонда нревысит уси.лие пружины 11 на ра..ц,иально- центрирую цих толкателях 10 (фиг. 1) и они утопятся в своих направляющих, про- .чсходит перемещение зонда с датчиком в кана.л ковша, а затем и в рясилан (в рас- гглав.ленньре пкчак и метал.л).
Ioc;ie необходи.мой выдержки датчика в расн.лаве зонд с датчиком подпи.мается вверх. Но 1ОДЛ)ем датчика происходит только до тех пор, пока его верхний торец не унрется в торцевые упоры на Bepxinix радиально- п,ен1 )пруюн1их толкателях 10 (фиг. 1), а зонд продолжает подниматься (без датчика) до исходного положения (до выхода из цилиндрической нолости контейнера, фиг. 1, или до подъема над заслонкой 23, фиг. 3).
После остановки зонда закрывают заслонки 4 и 23 (на фиг. 1 только заслонка 4) и производят шлюзовапне (выравнивание дав.. 1е1Ц1Й в атмосфере и в контейнере 9). Об ьем контейнера в десятки раз меньше облзе.ма шлюзовой камеры аналог ов, поэтому длительность шллюзования небольшая, порядка нескольких секунд. Но схеме на фиг. 3 нклюзование длится CHie меньше, по- ско.льку отпадает необходимость Н1;нозова- ния капала зонда.
Затем реверсируется гшевмоцилиндр 7 и под1 имается с|)ланец 5, сжнмая сильфон 6. Нрп этом пруж.чны 18 фнноднпмают акси- алы10-г1одвижн1)1Й унор 17 и в.месте с ни.м ко1ггейпер 9, а выступы 14 (фиг. 1) выходят я;( канавок с эластичпыми кольцами 16.
0
.5
0
5
Носле этого контейнер 9 операторо.м или роботом перемешаетея перпендикулярно оси каналов (и своей) и выводится в поло- женне «за.мена датчиков (штриховая линия , фиг. 3). В указанном по.ложении через нижний торец контейнера удаляетея использованпый датчик 12 и устанавливается новый (через любой торец). Направления дви- же1п-1я датчиков и контейнера нри замене дал чиков показаны сл ре.лкам.и.
Положительный эффект от использования предлагаемого устройства заключается в увеличении надежности за счет более надежной конструкции устройства герметизации .
Последнее обеспечено малой суммарной длиной эластичных прокладок и малыми габаритами канавок иод, уплотннтельные кольца .
Кроме того, благодаря тому, что шлюзовая камера выполнена в форме периодически перемещаемого контейнера, внутренний ее объем, в котором необходимо разместить только датчик и радиально-центрирую- шие толкатели, уменьшается в десятки раз. Как следствие этого, уменьшается время шлюзования (особенно в случае использования двух заслонок, фиг. 3) и длительность цикла ввода датчиков в расплав.
Дополнительный положительный эффект может проявиться в повышении показателей технологичности вследствие уменьшения веса , габаритов шлюзовой камеры уменьи1ения потребной мощности привода устройства герметизации , у.меньшения расхода энергии на шлюзование.
При этом предлагаемое устройство гораздо проще, надежнее и дешевле совмещается с роботами для автоматической замены датчиков .
Дополнительным эффектом можно считать увеличение надежности устройства, обусловленное меньшей длительностью ремонта . Так ре.монт, напри.мер, радиально- центрируюших толкателей в контейнере, а
также аксиально-подвижного фланца с сильфоном и приводом (при установке фланца на контейнере) вообще не требует остановки сталеплавильного ковша.
Формула изобретения
1.Устройство для ввода датчиков в расплав , содержащее зонд с датчиками, установленный в трубопроводе, ковш, снабженный выходным патрубком, и шлюзовую камеру , расположенную между трубопроводами , отличающееся тем, что, с целью повышения надежности устройства и сокращения времени рабочего цикла, шлюзовая камера выполнена в виде съемного контейнера, открытого с обоих торцов, установленного с возможностью перемещения в вертикальной и горизонтальной плоскостях, снабженного элементами центрирования и фиксации датчиков, приспособлением для герметизации , выполненным в виде фланцев с выступами , установ.пенных на трубопроводе и нижнем торце контейнера и выполненных соответственно выступам проточек, снабженных эластичными кольцами, при этом устройство снабжено корпусной рамой, жестко соединяющей шлюзовую камеру с трубопроводом и патрубком, с расположенной внутри него заслонкой при этом шлюзовая ка.мера снабжена фиксаторами перемещения контейнера.
2.Устройство по п. 1, отличающееся тем, что оно снабжено дополнительной заслонкой, установленной в трубопроводе.
А-А
12
17
Фиг. 2

Реферат
Изобретение относится к устройствам для отбора проб металла и измерения егс температуры в закрытых ковша.х с избыточным давлением или с вакуумом, может быть использовано в металлургии и н()зв( повысить надежность и сократить время рабочего цикла. Устройство содержит корпус ную раму (Р) 1. к верхним и нижним фланцам которой присоединены сверху трубопровод (Т) 2 и снизу патрубок 3 с заслонкой 4. На торце Т 2 установлен аксиально-подвижно фланец (Ф) 5, герметично соединенный с Т2 посредством сильфона 6 и кинематически связанный с приводом (пневмоцилинд- ром) 7. Р 2 имеет позиционирующие упоры 8 в виде двух плавно сопряженных вертикальных непараллельных стенок. Шлюзовая камера выполнена в форме съемного контейнера (К) 9. К 9 имеет внутри цилиндрическую полость, открытую с обоих торцов, в которой установлены верхние и нижние радиально-центрирующие сферические подпружиненные толкатели 11. Верхние толкатели имеют с нижней стороны проточки, фор- мируюн1ие торцевой упор для датчика 12, установленного в цилиндрнческой полости контейнера. На Ф 5 и нижнем торце 13 контейнера выполнены кольцевые выступы 14, а на верхнем торце 15 и торце патрубка 3 В1)1П{).1пепы ответные кольцевые канавки, в которых размещены эластичные кольца 16. 1 з.н. ф-. 1ы. Л и.1. S (Л ьо 4 СО оо 00
Формула
Комментарии