Механизм контроля за устройством обнаружения неисправности первичной передачи нагрузки исполнительному приводу управления летательным аппаратом - RU2715071C2
Код документа: RU2715071C2
Чертежи
Описание
Настоящее изобретение относится к механизму контроля за устройством обнаружения неисправности первичной передачи нагрузки исполнительному приводу управления, следовательно, механизм контроля предназначен для контроля функционирования устройства обнаружения неисправности первичной передачи нагрузки исполнительному приводу управления.
Известно, что исполнительный привод летательного аппарата содержит две механические передачи нагрузки, одну первичную и другую вторичную, причем последняя принимает на себя нагрузку при сбое первичной. В типичном устройстве известного уровня техники, как показано на фиг. 1, при работе первичной передачи нагрузки, нагрузки передаются посредством полого шара или роликового ходового болта. Полый болт содержит в себе аварийный стержень, называемый также предохранительным стержнем или соединительным стержнем, соединение которого с болтом имеет небольшой зазор. При нормальной эксплуатации болта, когда первичная передача нагрузки работает правильно, вторичная передача нагрузки, сформированная этим соединительным стержнем, не несет никакой нагрузки, поскольку нет контакта из-за наличия небольшого зазора. Тем не менее, в случае выхода из строя болта в первичной передаче нагрузки, соединительный стержень выполняет свою предохранительную функцию и обеспечивает непрерывность передачи нагрузок с помощью исполнительного привода.
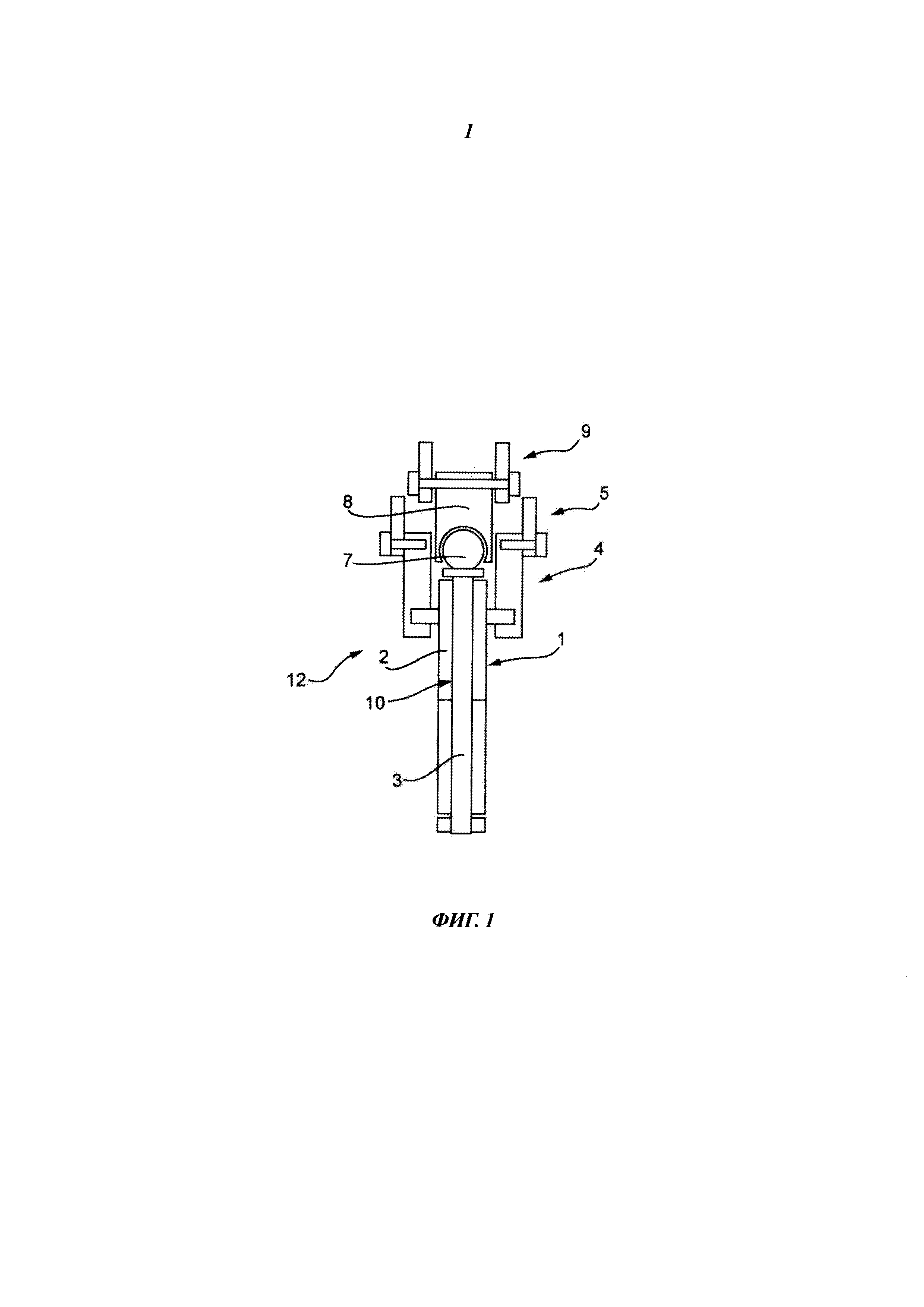
Ссылаясь на фиг. 1 типичный известный исполнительный привод управления летательным аппаратом, относящийся к типу исполнительного привода регулируемого горизонтального стабилизатора (ПРГС), содержит первичную передачу нагрузки с полым болтом 2, присоединенным своим верхним концом к летательному аппарату посредством карданной шарнирной системы 4, соединяясь с первичными элементами конструкции летательного аппарата 5. Первичная передача нагрузки дополнительно содержит узел гайки (не показано), установленного на болте 2, и узел гайки соединен со стабилизатором летательного аппарата, при этом данное соединение достигается посредством, например, другой карданной шарнирной системы.
Вторичная передача нагрузки функционирует с помощью соединительного стержня 3, который расположен внутри болта 2. На верхнем конце соединительного стержня 3 находится вставной элемент, в данном случае представленный в форме сферической головки 7, которая установлена в выемке на крепежной детали 8. Крепежная деталь 8 соединена с конструкцией летательного аппарата через вторичные элементы конструкции летательного аппарата 9. Типичная система может также содержать некоторые средства для предотвращения движения узла гайки относительно болта 2 и/или для фиксации стабилизатора на месте, при отказе первичной передачи нагрузки. Таким образом, нижнее средство фиксации, частью которого есть узел гайки, может также содержать элементы вторичной передачи нагрузки, которое применяется при отказе первичной передачи нагрузки.
Исполнительный привод летательного аппарата с основными характеристиками, описанными выше, можно найти в известном уровне техники, например в патенте США №8702034 и в патенте США №2013/105623.
Патент США №2013/105623 описывает устройство для обнаружения неисправности первичной передачи в исполнительном приводе управления летательным аппаратом, при этом упомянутый исполнительный привод содержит первичную передачу, содержащую вращательный полый болт и вторичную передачу, содержащую предохранительный стержень, который реагирует на нагрузку, проходящую через болт. Устройство, описанное в патенте США №2013/105623, содержит присоединенный к болту датчик положения для измерения данных о его угловом положении, а также систему рассоединения, способную отключать датчик положения болта в случае соответственного движения стержня относительно болта, в случае неисправности первичной передачи нагрузки. Таким образом, когда случается отказ основного пути, система рассоединения отсоединяет датчик положения болта, а это дает возможность предупредить пилота о неисправности первичной передачи. Предпочтительно эта система известного уровня техники не требует добавления новых датчиков для обнаружения неисправности первичной передачи, так как датчик положения, как правило, уже присутствует для определения местоположения болта, тем самым определяя положение исполнительного привода.
С точки зрения первого аспекта, изобретение предусматривает механизм контроля за устройством обнаружения неисправности первичной передачи нагрузки исполнительного привода летательного аппарата такого типа, который отсоединяет датчик положения от первичной передачи нагрузки в случае неисправности первичной передачи нагрузки, при этом механизм контроля содержит: механическое соединение для имитации отсоединения датчика положения посредством предоставления возможности для относительного перемещения по меньшей мере первой и второй механических частей исполнительного привода, которые при нормальной эксплуатации не в состоянии перемещаться относительно друг друга без неисправности первичной передачи нагрузки, причем эти первая и вторая механические части содержат первую механическую часть, движение которой обнаруживается датчиком положения устройства обнаружения неисправности первичной передачи нагрузки.
Известно, что в предшествующем уровне техники предусматриваются различные системы, которые предоставляют визуальную индикацию или электрический сигнал при отказе первичной передачи нагрузки. В примере, описанном выше в патенте США №2013/105623, датчик положения отсоединяется от первичной передачи нагрузки в случае неисправности первичной передачи нагрузки. Конечно, важно иметь возможность установить с высокой степенью уверенности, что устройство обнаружения неисправности первичной передачи нагрузки работает правильно. Если бы не было известно, что первичная передача нагрузки неисправна, это потенциально могло бы привести к катастрофическому отказу летательного аппарата при неисправности вторичной передачи нагрузки. Путем задействования механической связи, как это указано выше, можно тестировать как механические элементы, так и электрические элементы устройства обнаружения неисправности первичной передачи нагрузки, так как система применяет механическое движение соответствующих частей, и это может быть проверено с помощью электрических сигналов от датчика положения. Никаких дополнительных датчиков не требуется, так как механизм контроля использует тот же датчик, что и устройства обнаружения неисправности первичной передачи нагрузки.
Устройство обнаружения неисправности первичной передачи нагрузки может быть такого типа, который содержит датчик положения, представленный в качестве первого датчика положения для обнаружения положения устройства передачи основной нагрузки, основанное на движении первой механической части, также содержит второй датчик положения для обнаружения положения устройства передачи основной нагрузки, основанный на движении второй механической части. Предпочтительно два датчика положения и связанные механические части могут быть представлены элементами, которые уже присутствуют в системе исполнительного привода летательного аппарата, следовательно, отпадает необходимость вводить дополнительные механические или электрические части для реализации устройства обнаружения неисправности первичной передачи нагрузки. Это также минимизирует необходимость в дополнительных деталях, необходимых для механизма контроля.
Устройство обнаружения неисправности первичной передачи нагрузки может быть такого типа, который содержит съемный элемент, обычно установленный между механическими частями и предназначенный для блокировки их относительного движения, и этот съемный элемент применяется в качестве составной части механизма контроля. Таким образом, механизм контроля может содержать съемный элемент устройства обнаружения неисправности первичной передачи нагрузки, при этом съемный элемент установлен между механическими частями, как указано выше. Съемный элемент предпочтительно выполнен с возможностью отсоединения при отказе первичной передачи нагрузки, и при отсоединении съемного элемента датчик положения отсоединяется от первичной передачи нагрузки, как опция, путем отсоединения первой механической части от первичной передачи нагрузки.
Съемный элемент может быть представлен в качестве съемного крепежного элемента, например в качестве шарнира, который при нормальной эксплуатации установлен между элементами первичной передачи нагрузки и вторичной передачи нагрузки, и этот элемент высвобождается при отказе устройства передачи основной нагрузки. Одной из возможных форм для этого съемного крепежного элемента является ломкий штифт (или предохранительный штифт), выполненный так, чтобы разрушаться при передаче нагрузки от первичной передачи нагрузки на вторичную передачу нагрузки. Подходящий ломкий штифт описан, например, в патенте США №2013/105623. В этом случае высвобождение штифта имеет смысл срезки части штифта, первоначально удерживаемого вторичной передачей нагрузки, и последующего высвобождения штифта для вращения.
Датчик положения, и, как опция, второй датчик положения, если он присутствует, может быть представлен любым подходящим типом датчика, например, датчиком для определения углового положения механической части, или датчиком для определения линейного движения, где угловое положение или линейное перемещение являются следствием изменения положения приводного элемента первичной передачи нагрузки, который может быть представлен, например, в виде болта.
В некоторых примерных вариантах реализации изобретения механические детали представляют собой шестерни, соединенные с болтом в первичной передаче нагрузки исполнительного привода. Шестерни могут быть установлены таким образом, что при нормальной эксплуатации они вращаются вместе, а механическое соединение механизм контроля установлено таким образом, что приведенное в действие, оно перемещает одну из шестерней относительно другой. Предпочтительно движение шестерни, приводимой в движение, обнаруживается датчиком положения. При таком выполнении должно быть понятно, что можно легко обеспечить правильное функционирование устройства обнаружения неисправности первичной передачи нагрузки, так как при приведении в действие механического соединения происходит проверка как механического функционирования шестерен, так и электрической работы датчика положения. Устройство обнаружения неисправности первичной передачи нагрузки должно, как следствие, обеспечить сигнал, указывающий на отказ первичной передачи нагрузки, в случае приведения в действие механизм контроля. Оператор может гарантировать, что устройство обнаружения неисправности первичной передачи нагрузки работает правильно, путем задействования механизма контроля и без необходимости проведения обширных тестовых процедур.
Одной из возможных форм механической связи является соединительная тяга, установленная между съемным элементом механизма контроля (который может быть представлен в качестве съемного элемента устройства обнаружения неисправности первичной передачи нагрузки, как описано выше) и первой механической частью, при том, что соединительная тяга выполнена с возможностью перемещать первую механическую часть относительно второй механической части, когда механическое соединение приведено в действие. В качестве примера первая механическая часть представляет собой первую шестерню, где первый конец соединительной тяги установлен на ползуне, позволяющем движение тяги в радиальном направлении шестерни, и второй конец соединительной тяги проходит в паз, при этом паз имеет диагональную протяженность, как в радиальном направлении, так и по окружности шестерни. Таким образом, когда ползун перемещается в радиальном направлении, и первый конец соединительной тяги перемещается в радиальном направлении, то второй конец соединительной тяги понуждаем двигаться вдоль паза как в радиальном направлении, так и по окружности, что приводит к относительному круговому движению шестерни и съемного элемента, и, следовательно, имитирует временное отсоединение шестерни.
Первый конец соединительной тяги может быть присоединен к ползуну съемным элементом, при этом второй конец соединительной тяги проходит в пазу, выполненном на шестерне. Такое расположение обеспечивает простое приведение в действие механической связи, путем сдвига ползуна и/или съемного элемента в радиальном направлении. В этом случае ползун может быть выполнен в качестве полого вала, соединенного со съемным элементом, при этом съемный элемент движется с полым валом и, как опция, полый вал тоже движется относительно съемного элемента. В качестве альтернативы, было бы возможно, чтобы ползун был установлен на шестерне, а паз выполнен в съемном элементе. Соединительная тяга может быть выполнена как одно целое с ползуном, или проходить в отверстие на ползуне.
Механическое соединение механизма контроля может быть выполнено таким образом, что может быть приведено в действие снаружи исполнительного привода летательного аппарата, т.е. без необходимости снятия кожуха или корпуса исполнительного привода летательного аппарата. В некоторых примерных вариантах осуществления изобретения, механическое соединение приводится в действие путем воздействия на кнопку или рычаг снаружи корпуса исполнительного привода летательного аппарата, при этом воздействие на кнопку или рычаг перемещает механические части внутри корпуса. Механизм контроля может содержать кнопку, предназначенную для линейного движения, и доступную снаружи кожуха исполнительного привода летательного аппарата, при этом линейное перемещение кнопки приводит в действие механическое соединение, например, путем обеспечения линейного перемещение ползуна, который перемещает соединительную тягу, как описано выше.
Механическое соединение может быть снабжено пружинным возвратом или другим упругим механизмом, который противостоит силам, приводящим в действие механического соединения, и возвращает механическое соединение в его исходное положение после устранения этих сил. Если ползунок присутствует, как описано выше, то может присутствовать и возвратная пружина, которая будет перемещать ползун в его исходное положение, где первая шестерня перемещается вместе со второй механической частью. Это гарантирует, что при нормальной эксплуатации устройство обнаружения неисправности первичной передачи нагрузки не приведено в действие.
В соответствии с еще одним аспектом изобретение предусматривает включение в устройство обнаружения неисправности первичной передачи нагрузки механизма контроля, как описано выше. Устройство обнаружения неисправности первичной передачи нагрузки может обладать характеристиками, описанными выше, и, в частности, может содержать датчик положения, присоединенный к болту исполнительного привода и предназначенный для измерения данных, относящихся к местоположению болта, наряду с системой рассоединения, выполненной с возможностью отсоединения датчика положения от болта в случае неисправности первичной передачи нагрузки и, например, в результате относительного перемещения болта первичной передачи нагрузки относительно тяги вторичной передачи нагрузки исполнительного привода.
Устройство обнаружения может содержать в себя вычислительное устройство, выполненное с возможностью получать данные от датчика положения, а также получать данные, измеренные с помощью второго датчика положения, который не зависит от системы рассоединения, и сравнивать данные от двух датчиков положения для того, чтобы выявить, когда произошел отказ первичной передачи нагрузки.
В еще одном аспекте данное изобретение предполагает наличие механизма фиксации, например нижнего средства фиксации, для исполнительного привода летательного аппарата, при этом средство фиксации содержит устройство обнаружения неисправности первичной передачи нагрузки, как описано выше.
В другом аспекте изобретение также предполагает наличие исполнительного привода летательного аппарата, содержащего: первичную передачу нагрузки с полым болтом; вторичную передачу нагрузки с тягой, проходящей через болт, при этом вторичная передача нагрузки выполнена таким образом, чтобы принимать нагрузки, действующие на первичную передачу нагрузки в случае неисправности первичной передачи нагрузки; и устройство обнаружения неисправности первичной передачи нагрузки, содержащее механизм контроля, как описано выше.
Некоторые предпочтительные варианты осуществления настоящего изобретения будут теперь описаны посредством примера и со ссылкой на прилагаемые графические материалы, где:
Фиг. 1 иллюстрирует исполнительный привод летательного аппарата известного уровня техники;
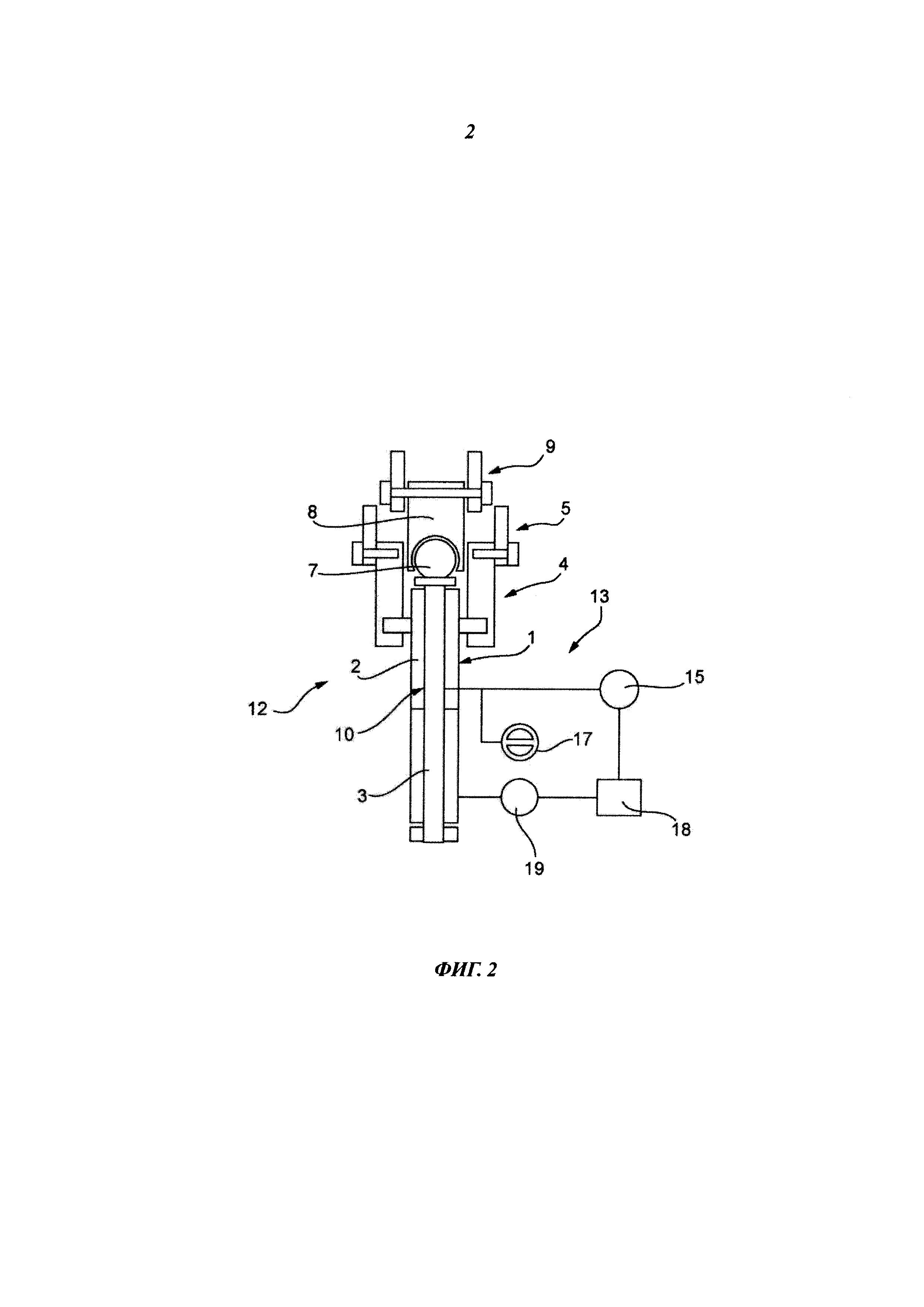
Фиг. 2 иллюстрирует схематическое изображение устройства обнаружения неисправности первичной передачи нагрузки в исполнительном приводе управления летательным аппаратом;
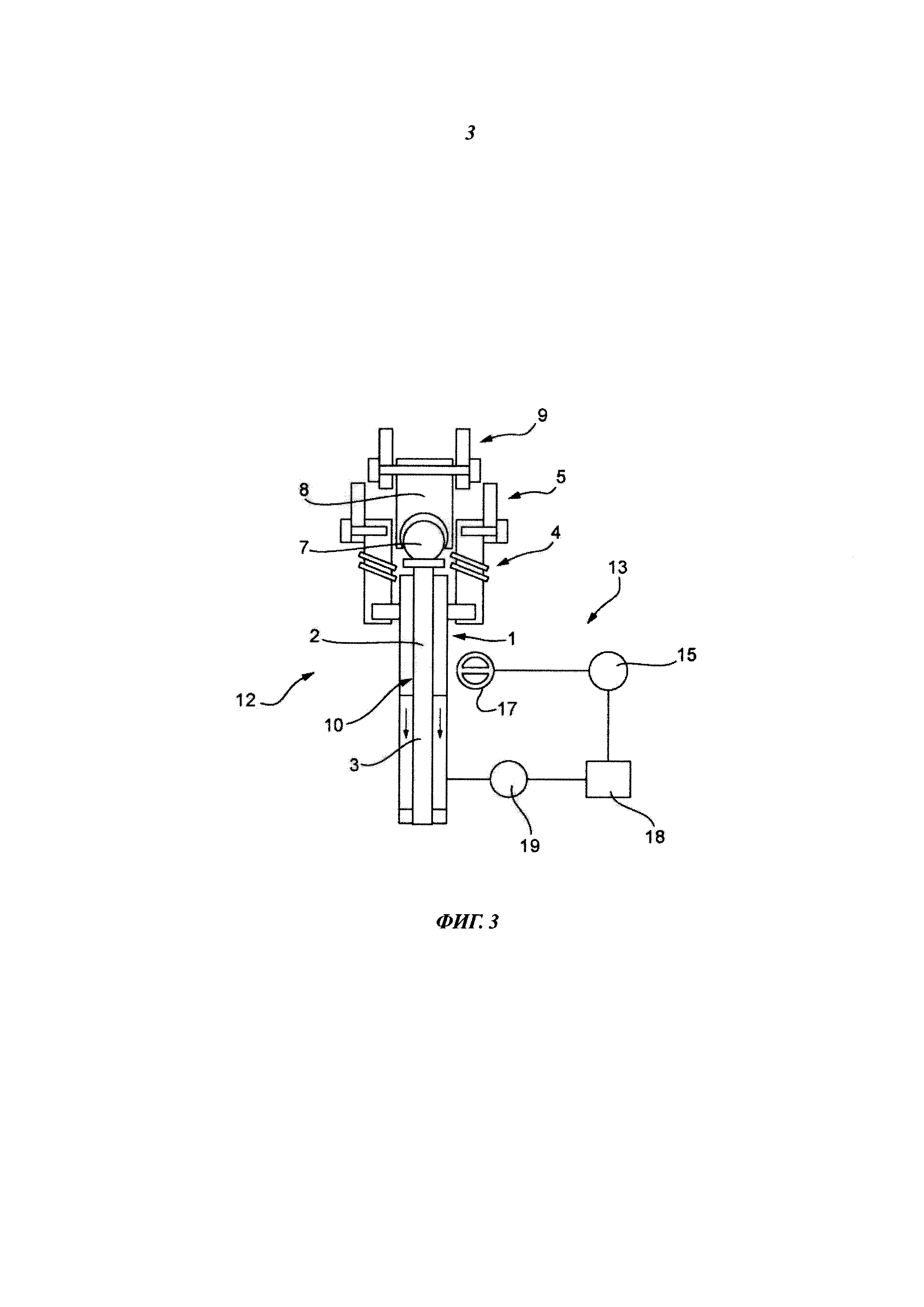
Фиг. 3 иллюстрирует устройство обнаружения и исполнительный привод, изображенный на фиг. 2, при неисправности устройства первичной передачи нагрузки;
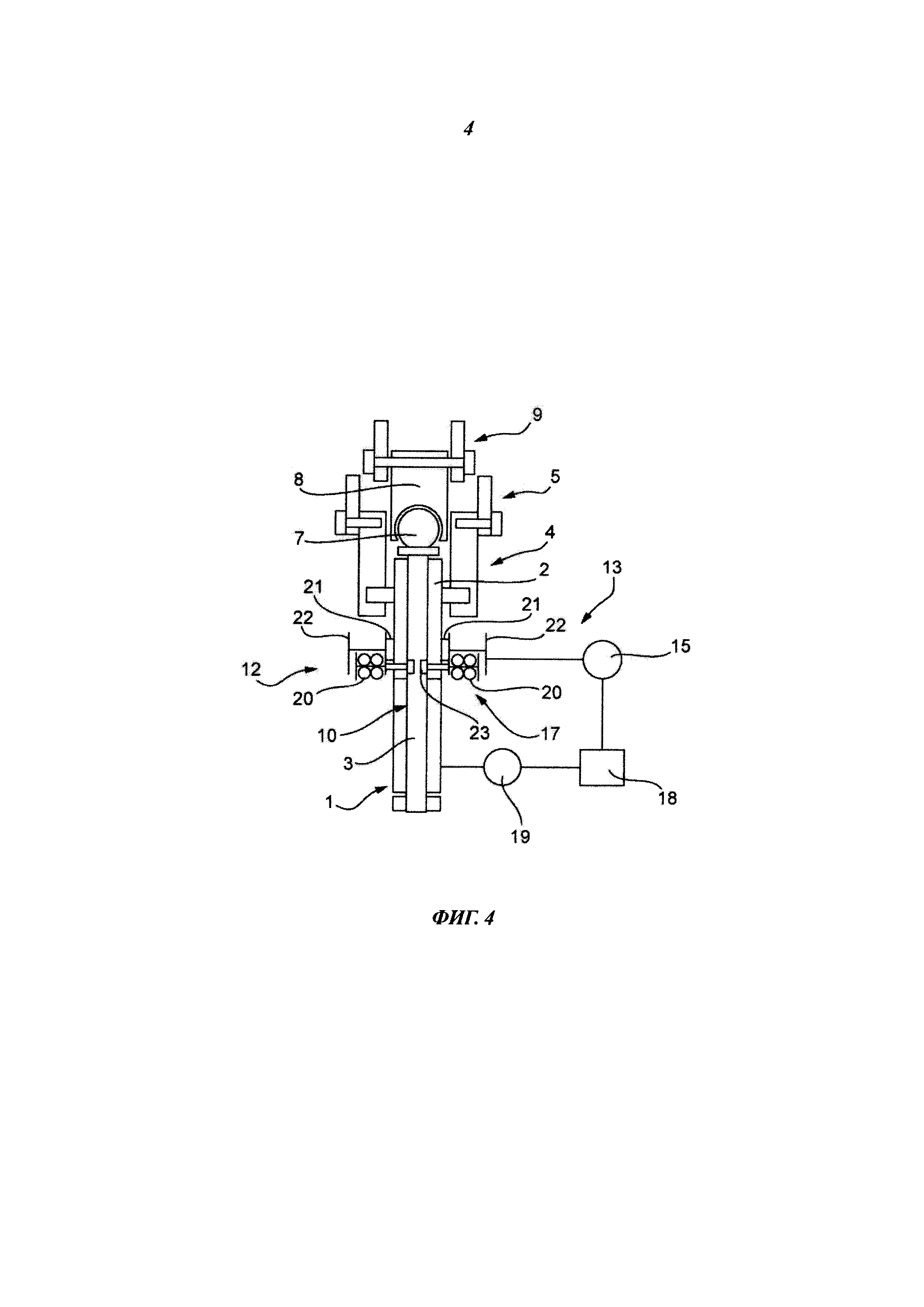
Фиг. 4 иллюстрирует схематическое изображение исполнительного привода управления летательным аппаратом, аналогичный изображенному на фиг. 2, с более подробной иллюстрацией устройства обнаружения;
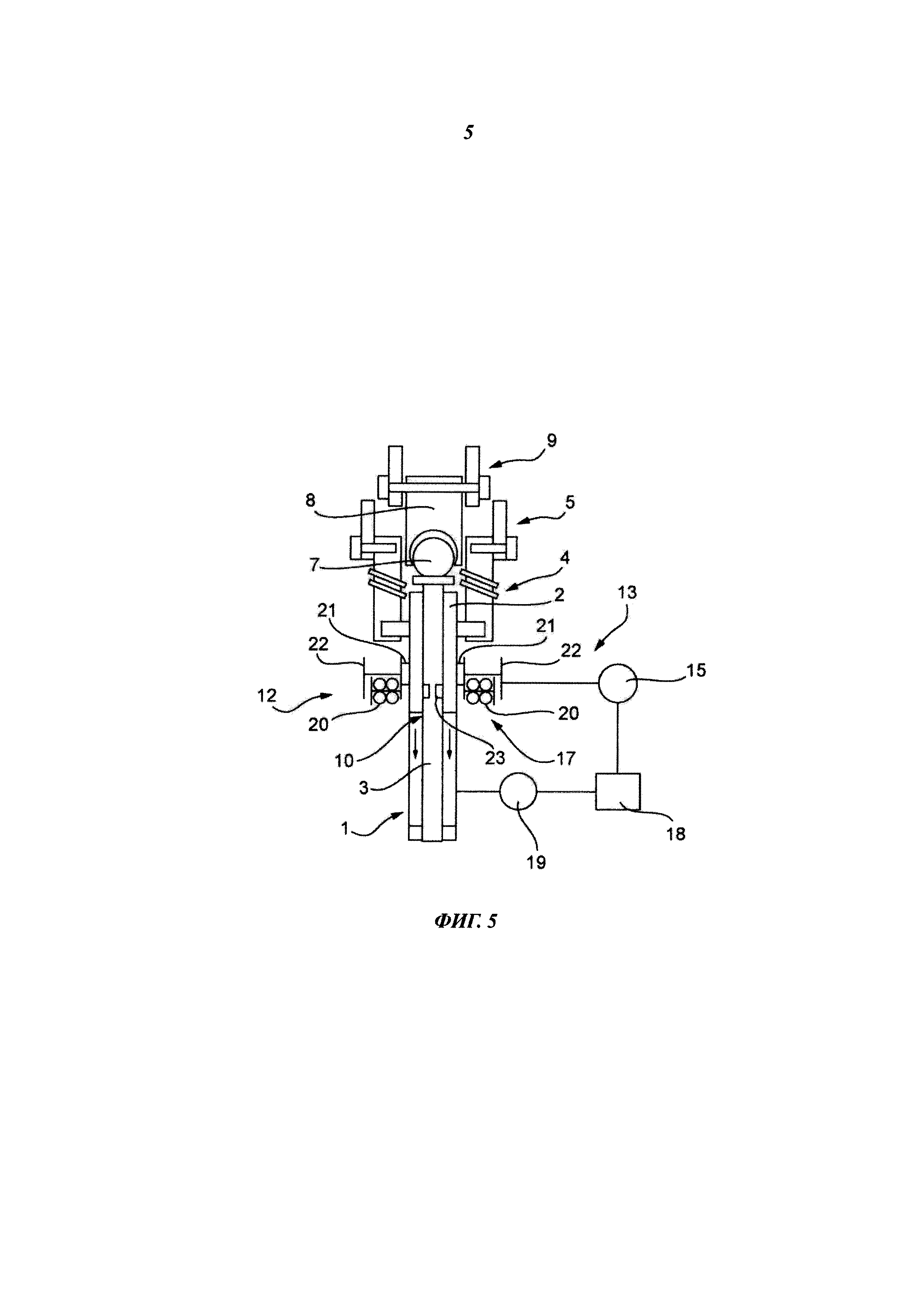
Фиг. 5 иллюстрирует устройство обнаружения и исполнительный привод, изображенный на фиг. 2, при неисправности первичной передачи нагрузки;
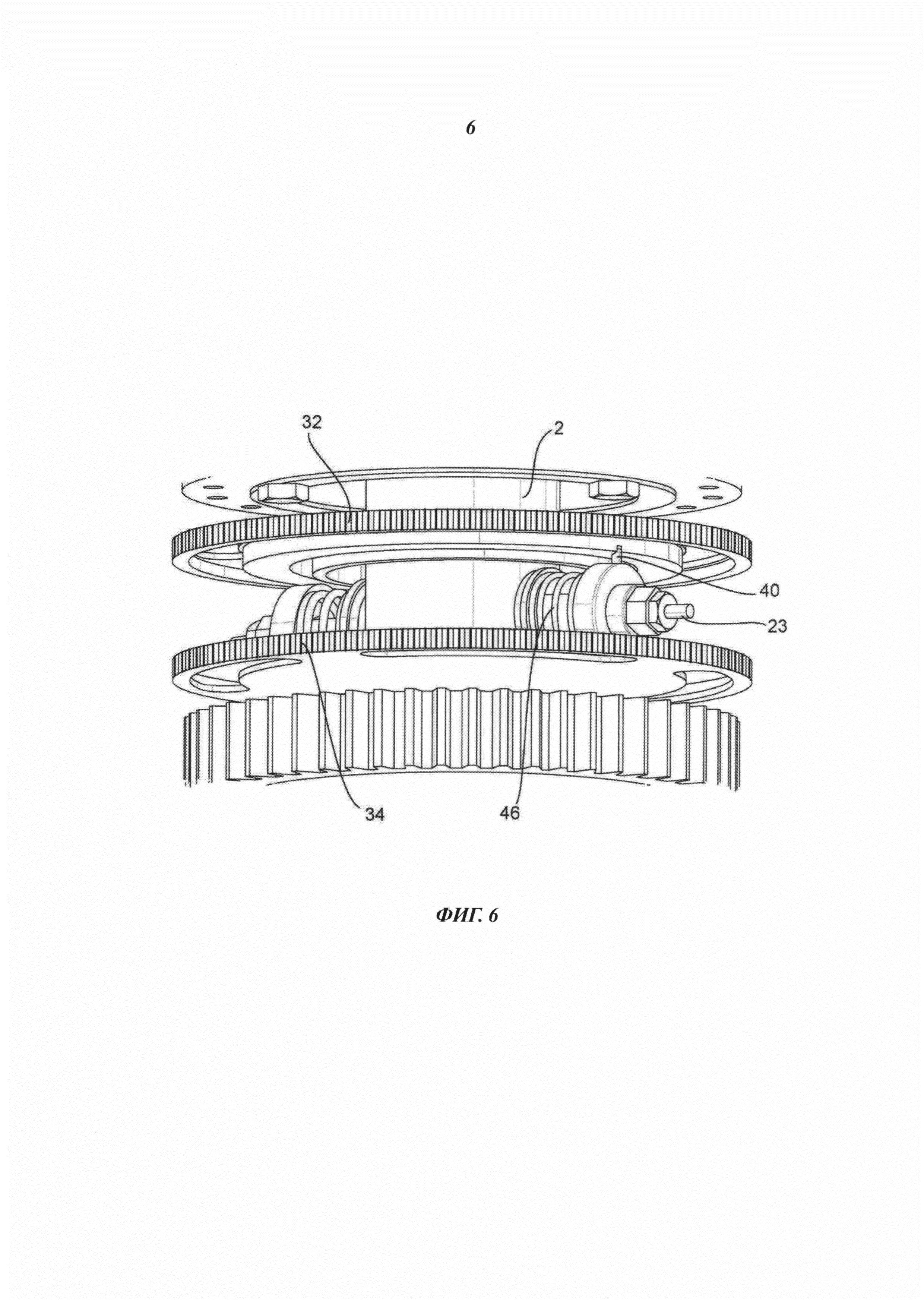
Фиг. 6 иллюстрирует детали исполнительного привода, включая устройство обнаружения для обнаружения неисправности первичной передачи нагрузки, а также механизм контроля для обеспечения правильной работы устройства обнаружения;
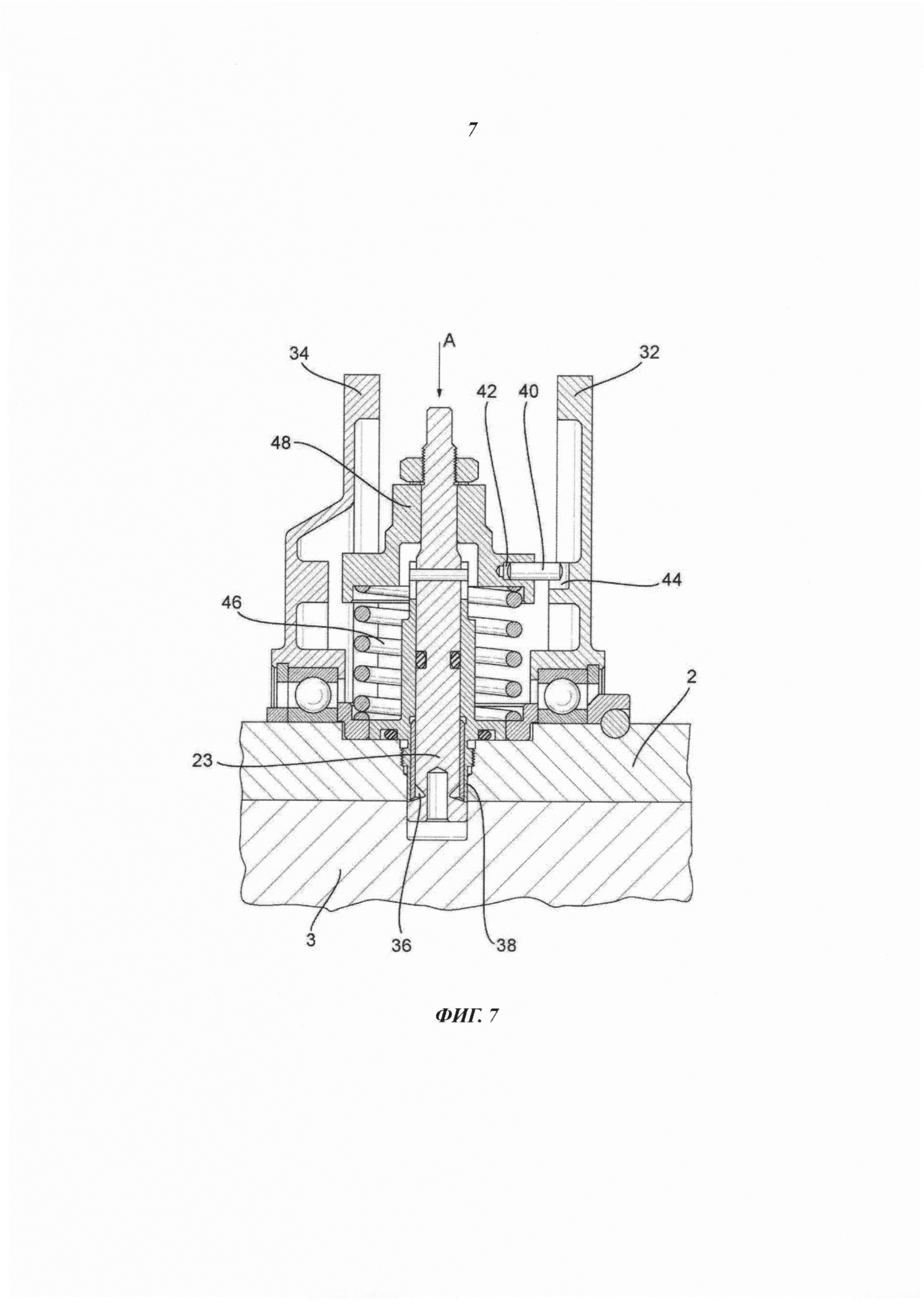
Фиг. 7 иллюстрирует сходные части, изображенные на фиг. 6, в поперечном сечении;
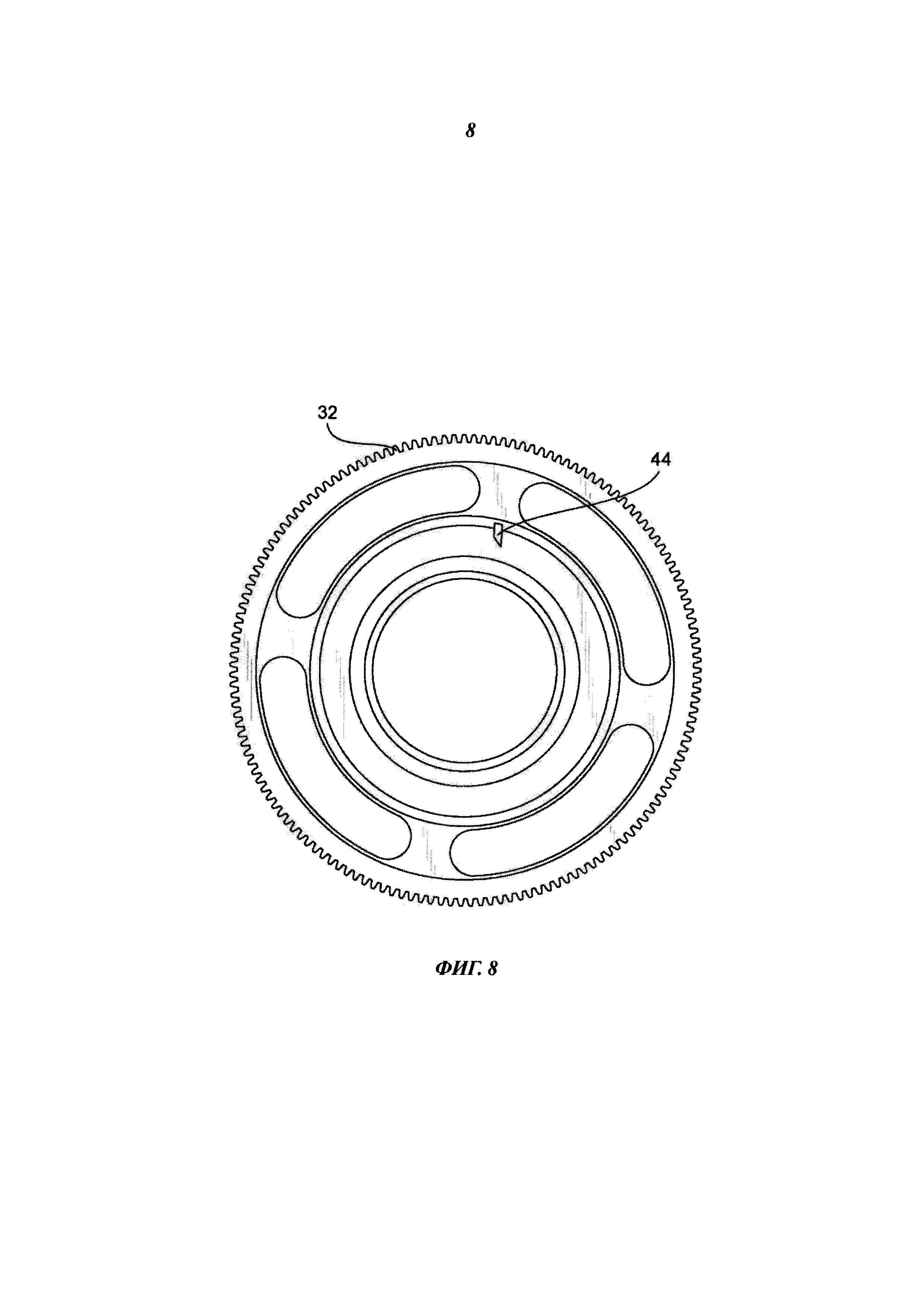
Фиг. 8 иллюстрирует механизм обратной связи от системы измерения углового положения исполнительного привода, а также иллюстрирует связь между механизмом обратной связи и проверочным устройством, изображенным на фиг. 6 и 7;
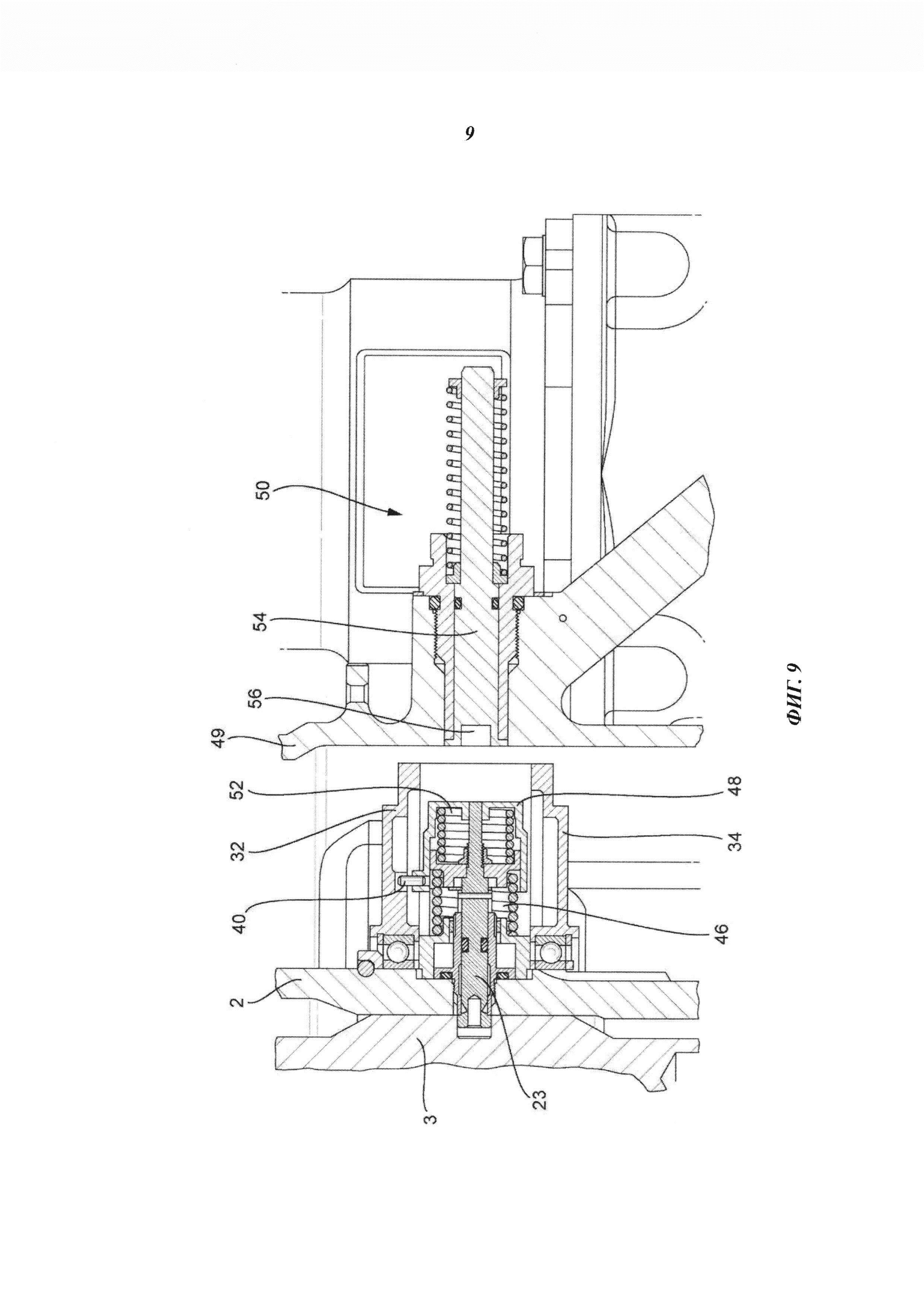
Фиг. 9 иллюстрирует поперечное сечение аналогичного механизма контроля, изображенного на фиг. 6 и 7, интегрированного в корпус, имеющий внешний исполнительный привод для механизма контроля.
Устройство обнаружения неисправности первичной передачи нагрузки 13 для исполнительного привода управления летательным аппаратом 12 проиллюстрировано на фиг. 2. Предлагаемый механизм контроля может применяться вместе с устройством обнаружения 13 этого типа.
Исполнительный привод управления летательным аппаратом 12 содержит первичную передачу нагрузки 1 и вторичную передачу нагрузки 10. Исполнительный привод 12 относится, например, к типу исполнительного привода регулируемого горизонтального стабилизатора (ПРГС) для управления изменяемой горизонтальной плоскостью управления летательным аппаратом (не показано). Первичная и вторичная передачи нагрузки 1, 10 содержат многочисленные элементы, и только некоторые из этих элементов будут описаны. Базовая структура исполнительных приводов управления летательным аппаратом, содержащих первичную передачу нагрузки и вторичную передачу нагрузки, известна.
Исполнительный привод, описанный здесь, относится к механическому типу, где для приведения в линейное движение применяют вращающийся болт 2. Первичная передача нагрузки 1, таким образом, содержит вращающийся полый болт 2, на одном из концов которого находится элемент фиксации, называемый верхним основным зажимом 4, через который он присоединен к конструкции 5 летательного аппарата. Как правило, первичная передача нагрузки 1 также содержит гайку (не показано), которая взаимодействует с болтом, будучи в сборке с ним, и которая соединена с поверхностью, подлежащей управлению. Болт 2 при вращении управляется двигателем, который позволяет гайке перемещаться поступательно, причем последняя блокируется во вращении для этой цели. Поступательно движение гайки, таким образом, позволяет контролировать девиацию, которую требуется передать изменяемой горизонтальной поверхности.
Предохранительный стержень 3 проходит через внутреннюю часть полого болта 2. Предохранительный стержень является одним из элементов вторичной передачи нагрузки 10. Как правило, вышеупомянутый стержень 3 оканчивается сферической головкой 7, установленной с некоторым зазором в сферической выемке элемента фиксации 8 вторичной передачи нагрузки, называемый верхним вторичным зажимом. Вышеупомянутый верхний вторичный зажим 8, в свою очередь, присоединен к летательному аппарату посредством элемента фиксации летательного аппарата 9, отличного от того, который используется для поддержки первичной передачи нагрузки 1. Средство фиксации верхнего вторичного зажима известно как таковое, и реализуется, в частности, посредством систем, использующих крепежные скобы и болты.
При "нормальной" эксплуатации нагрузку несет первичная передача нагрузки 1. В случае выхода из строя первичной передачи нагрузки 1, особенно при нарушении целостности одного из элементов, составляющих первичную передачу нагрузки 1, таких как верхний основной клип 4 или болт 2, например, нагрузку несет на себе вторичная передача нагрузки 10. Эта неисправность должна быть обнаружена, для последующего информирования пилота и, при необходимости, инициирования технического обслуживания на земле или, возможно, в полете.
Устройство обнаружения неисправности первичной передачи нагрузки 13 способно обнаружить такие отказы. Устройство обнаружения неисправности первичной передачи нагрузки 13 содержит датчик положения 15, соединенный с болтом 2 для измерения данных о его местоположении. Датчик 15 может быть представлен датчиком углового положения 15. Датчик углового положения 15 выполнен с возможностью измерения углового положения болта 2 и/или его углового смещения. Оно может включать угловое смещение и/или угловое позиционирование, которое может быть абсолютным или относительным в зависимости от выбранных условий. Таким образом, когда датчик 15 и болт 2 соединены, датчик 15 измеряет угловое положение болта 2. Датчик углового положения 15 может быть представлен, например, активным электрическим (индуктивным) вращательным датчиком измерения смещения типа РИД (роторный индуктивный датчик). Другие датчики углового положения также могут применяться.
В качестве альтернативы, данные о местоположении болта могут быть получены также от датчика линейного положения, такого как датчик измерения линейного смещения типа ЛИД (линейный индуктивный датчик). В этом случае датчик линейного положения 15 соединен с болтом 2 посредством, например, механизма типа шарико-винтовой передачи, который преобразует вращательное движение болта 2 в поступательное движение. Датчик линейного положения 15, следовательно, измеряет положение или смещение, которое является линейный, но указывает на угловое положение болта 2.
Любой датчик положения 15, способный получать данные о местоположении болта 2, может быть применен, то есть полученные данные (о местоположении, например) коррелируют с угловым положением болта 2 и, таким образом, позволяют определить местоположение болта.
Устройство обнаружения неисправности первичной передачи нагрузки 13 содержит систему рассоединения 17, способную отсоединять болт 2 от датчика положения 15 в случае соответственного смещения стержня 3 относительно болта 2 в случае неисправности первичной передачи нагрузки 1. Вышеупомянутое отсоединение, таким образом, приводит к разрыву соединения между датчиком 15 и болтом 2. Предпочтительно, система рассоединения 17 откалибрована таким образом, чтобы отсоединять болт 2 от датчика 15 только в случае неисправности первичной передачи нагрузки 1.
В случае выхода из строя элемента первичной передачи нагрузки 1, нагрузку берет на себя вторичная передача нагрузки 10. Стержень 3 затем выполняет соответственное смещение относительно болта 2, при этом упомянутое смещение ориентировано, главным образом, параллельно болту 2, в поступательном движении в одном направлении или в другом. При таком типе системы, относительное перемещение стержня 3 относительно болта 2 обнаруживается системой рассоединения 17, которое затем приводит к отсоединению болта 2 и датчика положения 15. Упомянутое отсоединения происходит в момент, когда соответствующее перемещение стержня 3 относительно болта 2 или величина приложенной к стержню 3 нагрузки превышает заданную пороговую величину смещения или нагрузки, и данная пороговая величина соответствует выходу из строя первичной передачи нагрузки 1. Пороговая величина, может быть определена, например, в результате моделирования или исходя из измерений на месте. Целью является избежание ложных срабатываний из-за относительного движения болта 2 и стержня 3 и/или нагрузок на стержень 3, которые не являются результатом выхода из строя первичной передачи нагрузки 1. Только достаточно большая нагрузка или соответствующее перемещение стержня 3 относительно болта 2 выше порогового значения соответствуют выходу из строя первичной передачи нагрузки 1.
В случае значения ниже заданного порогового, система рассоединения 17 не отсоединяет болт 2 и датчик положения 15, что позволяет избежать ложных срабатываний. Система рассоединения может содержать в себя датчик или набор датчиков для измерения соответствующего перемещения стержня 3 относительно болта 2 (или, наоборот), что дает возможность отсоединить болт 2 от датчика положения 15 только в случае неисправности первичной передачи нагрузки 1. Как альтернатива, система рассоединения 17 выполнена с возможностью отсоединения датчика положения 15 от болта 2, когда стержень 3 оказывает заранее определенную нагрузку на стержень 2, что соответствует механической силе, действующей со стороны стержня 3 на болт 2 в случае неисправности первичной передачи нагрузки 1. Таким образом, пороговая величина для выявления неисправности первичной передачи нагрузки, может быть обеспечена исключительно механической системой, предотвращая необходимость в дополнительных электрических компонентах. В случае отказа устройства передачи основной нагрузки, стержень 3 перемещается относительно болта 2 и, вслед за этим, оказывает на болт 2 механическую нагрузку, которая превышает заданное пороговое значение, при этом указанная механическая нагрузка воспринимается системой рассоединения 17 в целях механического отсоединения болта 2 от датчика положения 15 при выходе из строя первичной передачи нагрузки 1.
Устройство обнаружения неисправности первичной передачи нагрузки 13 дополнительно содержит вычислительное устройство 18, выполненное с возможностью сравнения данных об угловом положении болта 2, измеренные датчиком положения 15 и данных об угловом положение болта 2, измеренные вторым датчиком положения 19 устройства обнаружения 13. Когда датчик положения 15 отключен, то данные от двух датчиков не согласуются. Поэтому не вызывает затруднений определить, когда устройство обнаружения неисправности первичной передачи нагрузки 13 выявит неисправность первичной передачи нагрузки.
Данные об угловом положении болта 2, измеренные с помощью второго датчика положения 19 могут быть представлены самим угловым положением или измерением линейного положения, как упоминалось выше. Второй датчик положения 19 отличается от датчика 15 тем, что он не присоединен к болту 2 посредством системы рассоединения 17. Второй датчик положения 19, следовательно, не зависит от системы рассоединения 17. Помимо этого различия, второй датчик положения, как правило, относится к такому же типу датчиков, способных измерять данные об угловом положение болта 2. Если два датчика идентичны, тогда легко сравнить данные на их выходах для идентификации неисправности первичной передачи нагрузки.
Этот второй датчик положения 19 может быть датчиком углового положения, принадлежащим самому летательному аппарату, применяемым для управления и коррекции вращения болта 2 при "нормальной" эксплуатации. Предпочтительно это может быть, в частности, датчик углового положения, соединенный с болтом 2 и содержащийся во всех исполнительных приводах управления летательным аппаратом, где избегают установки новых датчиков. Предпочтительно, датчик положения 15 и второй датчик положения 19 включены в один и тот же многоканальный датчик.
Устройство обнаружения неисправности первичной передачи нагрузки 13, следовательно, позволяет использовать датчики, уже присутствующие на летательном аппарате, просто интегрировав в исполнительный привод устройство обнаружения 13, и в частности систему рассоединения 17.
Фиг. 3 иллюстрирует неисправность первичной передачи нагрузки 1 и передачу нагрузки на вторичную передачу нагрузки 10. Поломка проиллюстрирована в месте верхнего основного зажима 4, но может произойти в любом элементе первичной передачи нагрузки 1 исполнительного привода. До момента указанной поломки, то есть при "нормальной" эксплуатации, датчик 15 подключен к болту 2 и, следовательно, измеряет данные об угловом положении болта 2. Кроме того, во вращении болт 2 управляется пилотом посредством полетных команд, которые он передает летательному аппарату. Данные об угловом положении болта 2 измеряются посредством второго датчика положения 19, который, в свою очередь продолжает измерять данные об угловом положение болта 2, даже в случае неисправности первичной передачи нагрузки 1, потому что он не соединен с болтом 2 с помощью системы рассоединения 17.
В случае неисправности первичной передачи нагрузки 1, нагрузку берет на себя вторичная передача нагрузки 10. В этом случае стержень 3 подвергается смещению относительно болта 2, при этом указанное смещение, превышая заданное пороговое значение, указывает на неисправность первичной передачи нагрузки 1.
Когда это превышение порогового значения смещения происходит, система рассоединения 17 отсоединяет болт 2 и датчик положения 15. Следовательно, датчик 15 больше не измеряет данные об угловом положение болта 2. Датчик положения 15 затем измеряет сигнал, который равен нулю или остается постоянным, что позволяет обнаружить сбой в работе устройства передачи основной нагрузки 1 и, следовательно, неисправность. Второй датчик 19 продолжает измерять данные об угловом положение болта 2 и об изменениях упомянутого положения.
Если вычислительное устройство 18 сравнивает сигнал от второго датчика 19 с сигналом, измеренным датчиком положения 15, который был отсоединен от болта 2 посредством системы рассоединения 17, становиться ясно, что сигналы будут различаться, в то время как до момента сбоя они были равны или, по крайней мере, коррелировались. Вычислительное устройство 18 выполнено с возможностью обнаружения неисправности, когда величина сравнения данных, измеренных датчиком положения 15, и данных, измеренных вторым датчиком положения 19 больше или меньше, чем заранее определенная пороговая величина.
Фиг. 4 иллюстрирует более подробно устройство обнаружения неисправности первичной передачи нагрузки 13. В этом устройстве 13 система рассоединения 17 содержит ломкий штифт 23, также известный как предохранителей штифт. Указанный ломкий штифт 23 имеет поперечное сечение, откалиброванное таким образом, чтобы сломаться при заданной нагрузке, соответствующей механической нагрузке, действующей со стороны стержня 3 на болт 2 в случае неисправности первичной передачи нагрузки 1 (поломка болта или другого элемента первичной передачи нагрузки 1). Это позволяет системе рассоединения 17 действовать автоматически в случае неисправности первичной передачи нагрузки 1, только лишь при наличии механического компонента и без дополнительных датчиков или тому подобное. Штифт 23 может быть помещен в гнездо, проходящее через болт 2 и стержень 3, или быть ввинченным в канавку, прорезанную для этой цели. Кроме того, ось упомянутого ломкого штифта 23 подвергается действию заданной нагрузки экстракции, что позволяет извлекать штифт 23 из болта 2 в случае поломки указанного штифта 23. Указанная нагрузка экстракции оказывается на штифты 20, под прямым углом к болту 2. Ломкий штифт 23 может подключать болт 2 к малому зубчатому колесу 22, которое через зубчатую передачу приводит в движение датчик положения 15, например датчик углового положения приводится во вращение.
В случае неисправности первичной передачи нагрузки 1, и когда, как показано на фиг. 5, стержень 3 оказывает механическую нагрузку, превышающую пороговую величину поломки штифта 23, это вызывает поломку штифта 23. Благодаря нагрузке от пружины, действующей на штифт 23, он выходит из болта 3. При выходе, малое зубчатое колесо 22 высвобождается для вращения, благодаря, в частности, подшипнику 21. Поэтому малое зубчатое колесо 22 больше не следует вращению болта 2, что означает, что датчик 15 больше не измеряет данные об угловом положении болта 2 и отсоединен от указанного болта 2, что позволяет обнаружить неисправность первичной передачи нагрузки 1.
Когда вычислительное устройство 8 сравнивает сигнал, измеренный датчиком положения 15 с сигналом, измеренным вторым датчиком положения 19, он обнаруживает неисправность, если величина сравнения больше (или меньше, в зависимости от обстоятельств), чем предопределенная пороговая величина.
Желательно иметь возможность тестировать устройство обнаружения неисправности первичной передачи нагрузки 13, чтобы удостовериться в его правильной работе. Очевидно, что устройство рассоединения 17 может быть проверено путем приложения нагрузки на вторичную передачу нагрузки, но это нежелательно, так как приведет к значительному вмешательству в работу летательного аппарата, потенциально через отсоединение первичной передачи нагрузки, а также это может повлечь необратимые изменения некоторых компонентов, например ломкого штифта 23. Таким образом, дополнительный механизм для проверки устройство обнаружения обеспечил бы преимущества, особенно, если бы можно было тестировать устройство обнаружения без необходимости отсоединения устройства первичной передачи нагрузки или повреждения ломких элементов устройства обнаружения неисправности первичной передачи нагрузки 13.
Фиг. 6 и 7 иллюстрируют примерную компоновку устройства обнаружения неисправности первичной передачи нагрузки 13, адаптированную к включению в состав механизма контроля. В этом примере работа устройства обнаружения неисправности первичной передачи нагрузки 13 аналогична той, что описана выше для фиг. 4 и 5. Болт 2, который проходит вертикально через центр элементов, изображенных на фиг.6, соединен с механическими деталями в виде механизмов обратной связи 32, 34, которые, в свою очередь соединены с соответствующими датчиками положения, например с датчиками РИД. При стандартном использовании оба из двух механизмов обратной связи 32, 34 вращаются вместе с болтом 2, и, следовательно, оба они обеспечивают одинаковое показание местоположения болта 2. Первый механизм обратной связи 32 может быть подключен к датчику положения 15 устройства обнаружения отказа 13, а второй механизм обратной связи 34 может быть соединен со вторым датчиком положения 19 устройства обнаружения отказа 13. Как описано выше, при выходе из строя первичной передачи нагрузки, устройство обнаружения отказа 13 отключит датчик положения 15, так чтобы обеспечить различные показания этого датчика и второго датчика положения 19. В данном примере это условие достигается с помощью двух ломких штифтов 23, которые крепятся симметрично относительно болта 2 и описаны более подробно ниже.
Механизм контроля вводится в эксплуатацию таким образом, что, при задействовании, приводит к временному отсоединению или разъединению датчика положения 15 и болта 2, тем самым имитируя неисправность первичной передачи нагрузки. В этом примере временное отсоединение достигается посредством механической системы, которая позволяет относительное перемещение первого и второго механизма обратной связи 32, 34 в отношении болта 2, и относительное перемещение первого механизма обратной связи 32 в отношении второго механизма обратной связи 34. В результате мы получаем различные показания датчика положения 15 и второго датчика положения 19, что означает, что неисправность первичной передачи нагрузки становится очевидной и легко обнаруживается.
Учитывая более подробную примерную компоновку ломкого штифта 23, с конкретной ссылкой на Фиг. 7, ломкий штифт 23 в этом примере, как видно на поперечном сечении, имеет горловинную часть 36, расположенную поперек плоскости соединения стержня 3 вторичной передачи нагрузка исполнительного привода и болта 2 первичной передачи нагрузки. Как говорилось выше, при выходе из строя первичной передачи нагрузки, на стержень 3 будет оказываться осевая нагрузка, которая принуждает стержень 3 смещаться аксиально относительно болта 2. Осевая нагрузка, выходя за границы определенной пороговой величины, сломает ломкий штифт 23 на горловине 36. Горловина 36 тщательно откалибрована таким образом, чтобы ломаться при соответствующей пороговой величине, что указывает на неисправность первичной передачи нагрузки, и чтобы не ломаться при нормальной эксплуатации, когда никакая существенная нагрузка не приложена к вторичной передаче нагрузки и первичная передача нагрузки переносит нагрузку на исполнительный привод.
На противоположных сторонах болта 2 расположены два ломких штифта 23, как показано на фиг. 6. Один штифт 23 присоединен к первому механизму обратной связи 32, а другой штифт 23 присоединен к второму механизму обратной связи 34. Штифты 23 формируют часть соединения между механизмами обратной связи 32, 34 и болтом 2, и обеспечивают связанное движение механизмов обратной связи 32, 34 и болта 2 при нормальной эксплуатации, когда первичная передача нагрузки исправна.
Фиг. 7 также иллюстрирует соединения двух механизмов обратной связи 32, 34 и болта 2, а также связи между одним из ломких штифтов 23 и первым механизмом обратной связи 32. При нормальной эксплуатации, когда ломкие штифты 23 целы, то оба из двух механизмов обратной связи 32, 34 будут поворачиваться к одному и тому же угловому положению, в зависимости от местоположения болта 2. Однако, когда ломкие штифты 23 сдвигаются, то два механизма обратной связи 32, 34 больше не будут вращаться вместе. Вместо этого, зубчатое зацепление 38 в связке с подшипниками, которое крепит механизмы обратной связи 32, 34 к валу, влияет на то, что второй механизм обратной связи 34 и первый механизм обратной связи 32 не будут вращаться вместе с болтом 2 и будут отделены друг от друга. Таким образом, датчики 15, 19 прикрепленные к механизмам обратной связи 32, 34, могут применяться для обеспечения выявления неисправности первичной передачи нагрузки способом, описанным выше, например, с помощью вычислительного устройства 18, тогда как два механизма обратной связи 32, 34 будут указывать на различные местоположения болта 2.
Малая соединительная тяга 40 установлена между ломким штифтом 23 и первым механизмом обратной связи 32 таким образом, чтобы блокировать относительное вращательное движение. Соединительная тяга 40 расположена в отверстии 42 с одной стороны и в диагональной проточке 44 с другой стороны. Диагональная проточка 44 является диагональной в том смысле, что она простирается в радиальном и круговом направлении относительно механизма обратной связи 32. В примере, проиллюстрированном в графических материалах, отверстие 42 соединено с штифтом 23, и проточка 44 выточена на механизме обратной связи 32, хотя, конечно, следует понимать, что может быть использована противоположная схема. Фиг. 8 иллюстрирует диагональную проточку в перспективе. Следует понимать, что радиальное перемещение соединительной тяги 40 относительно механизма обратной связи 32 приведет к вращательному движению механизма обратной связи 32. При нормальной эксплуатации соединительная тяга 40 не перемещается в радиальном направлении и, таким образом механизмы обратной связи 32, 34 перемещаются вместе. Когда требуется проверить работу устройства обнаружения неисправности первичной передачи нагрузки 13, тогда соединительная тяга 40 перемещается в радиальном направлении для того, чтобы сместить первый механизм обратной связи 32 относительно второго механизма обратной связи 42. В результате имеется расхождение между измерениями от датчика положения 15 и второго датчика положения 19. Это означает, что как механические, так и электрические аспекты устройства обнаружения неисправности первичной передачи нагрузки 13 могут быть протестированы, так как при радиальном смещении соединительной тяги 40 и, как следствие, при вращательном движения первого механизма обратной связи 32 может быть смоделирован выход из строя первичной передачи нагрузки.
В этом примере радиальное перемещение соединительной тяги 40 достигается радиальным перемещением ломкого штифта 23, вызванным приложением силы в направлении, показанном на Фиг. 7 посредством стрелки А. Эта сила толкает ломкий штифт 23 внутрь, сжимая пружину 46, а также перемещая соединительную тягу 40 радиально внутрь, тем самым поворачивая первый механизм обратной связи 32. Можно увидеть, что соединительная тяга 40 находится в отверстии 42 на муфте 48, прикрепленной к ломкому штифту и приводимой в движение посредством сжатия пружины 46. Когда сила в направлении А устранена, то пружина вызывает движение сборки назад к своему стандартному положению, возвращая соединительной тяге 42 ее применимое положение, и вращая первый механизм обратной связи 32 назад к соосному положению со вторым механизмом обратной связи 34.
Таким образом, следует понимать, что благодаря такому простому устройству, и исключая необходимость в каких-либо дополнительных датчиках или сложных компонентах, становится простым процесс тестирования механических и электрических компонентов устройства обнаружения неисправности первичной передачи нагрузки 13 посредством временной имитации рассоединения, а, значит, неисправности первичной передачи нагрузки.
Еще одна примерная компоновка для механизма контроля показана на фиг. 9, и эта фигура также иллюстрирует. Устройство в месте установки располагается внутри корпуса 49, при этом корпус 49 снабжен внешним исполнительным приводом 50, который позволяет приводить в действие механизм контроля с наружной стороны корпуса 48. Можно увидеть, что механизм контроля, изображенный на Фиг. 9, также содержит дополнительный элемент, что и на фиг. 6 и 7, так как также как и пружина 46 сжимается, когда ломкий штифт 23 проталкивается внутрь, устройство на фиг. 9 также имеет муфту 48, прикрепленную к ломкому штифту 23 таким образом, чтобы обеспечить относительное радиальное перемещение, с последующим сжатием пружины 52 при проталкивании муфты 48 внутрь относительно ломкого штифта 23. Этот механизм обеспечивает большее радиальное перемещение соединительной тяги 40, так как муфта 48 может выйти за границы диапазона перемещения ломкого штифта 23. Однако следует понимать, что компоновку на фиг. 7 можно заменить компоновкой фиг. 9 и применять в аналогичном корпусе 49 с аналогичным внешним исполнительным приводом 50.
Учитывая более детальное описание внешнего исполнительного привода 50, будет видно, что он принимает форму подпружиненной кнопки 54, которая проходит через уплотняющий слой в корпусе 49, для приложения силы к муфте 48 и ломкому штифту 23. В примере на фиг. 9, где муфта может перемещаться относительно ломкого штифта 23, кнопка 54 имеет на своем конце углубление 56 для обеспечения относительного движения. Конечно, следует понимать, что это углубление 56 может не потребоваться в случае, когда применяется несколько упрощенная компоновка, изображенная на фиг. 7.
Реферат
Изобретение относится к устройствам обнаружения неисправностей в устройствах летательных аппаратов. Механизм контроля предусмотрен для устройства обнаружения неисправности первичной передачи нагрузки исполнительному приводу управления летательным аппаратом, относящийся к типу, когда датчик положения отсоединяется от первичной передачи нагрузки в случае неисправности первичной передачи нагрузки. Механизм контроля содержит: механическую связь (40) для имитации отсоединения датчика положения, предоставляя возможность для относительного перемещения по меньшей мере первой и второй механических частей (32, 34) исполнительного привода, которые не могут двигаться относительно друг друга при нормальной эксплуатации без неисправности первичной передачи нагрузки, причем движение первой механической части обнаруживается датчиком положения устройства обнаружения неисправности первичной передачи нагрузки. Изобретение повышает надежность летательных аппаратов. 4 н. и 11 з.п. ф-лы, 9 ил.
Комментарии