Способ (варианты), устройство и система для управления тягой скважинного трактора - RU2353751C2
Код документа: RU2353751C2
Чертежи











Описание
Область техники изобретения
Настоящее изобретение относится к устройству, системам и способам для управления или регулирования тяги скважинного трактора в скважине.
В индустрии разведки и добычи нефти скважинные тракторы часто используются для перемещения инструментов и других устройств в скважине. Тем не менее, скважинные тракторы могут быть использованы для любых требуемых целей. Используемые в данном описании термины «трактор», «скважинный трактор» и их вариации означают механизированное устройство любой формы, конфигурации и состава, способное перемещаться в скважине. Термин «скважина» и его вариации означают и включают в себя любое подземное отверстие, проход или область. «Открытая скважина» является скважиной, которая не имеет обсадной колонны. «Невертикальная скважина» является скважиной, которая, по меньшей мере, частично ориентирована не вертикально, как горизонтальная или наклонная скважина.
Обычно перемещение трактора осуществляется с помощью тяги силы трения между одним или несколькими компонентами, соединенными с трактором, упоминающиеся здесь как «узел(ы) привода», и стенкой скважины. В этих случаях нормальная сила обычно прикладывается к узлу привода для вдавливания его в стенку скважины.
Для трактора, с помощью которого достигается или обеспечивается движение в скважине, узел привода не может проскальзывать полностью относительно стенки скважины, так что сила тяги (FT)≤µFN, где µ является коэффициентом трения между узлом привода и стенкой скважины и FN является нормальной силой. Также узел привода должен обеспечивать достаточную силу тяги, превышающую торможение или сопротивление узла привода, которые могут быть вызваны перемещаемым инструментом(ами) и кабелем доставки, так что FT≥FR.
Любое количество других факторов (обозначенных в этом патенте как «факторы помех») могут оказывать влияние на величину тяги, необходимой, чтобы перемещать трактор в скважине в любой конкретной ситуации и рабочем окружении. Например, когда стенка скважины имеет неровную поверхность, величина тяги, необходимой для перемещения, и/или коэффициент трения могут меняться по мере изменения поверхности, проходимой трактором. Несколькими другими примерами факторов помех, которые могут влиять на сопротивление движению трактора, являются изменения угла наклона скважины, диаметра скважины, поверхности скважины, свойств стенки скважины, увеличение сопротивления кабеля (когда используется кабель), осыпь в скважине и свойства скважинной текучей среды.
Когда величина тяги, необходимой для движения или продолжения движения трактора в скважине, изменяется, то нормальная сила на узле(ах) привода должна быть скорректирована. Иначе трактор может испытать сильное проскальзывание. Следовательно, для поддержания FT≤µFN, нормальная сила FN должна быть скорректирована. Нормальная сила может также нуждаться в корректировке, когда требуется ограничить перерасход энергии или излишнюю чрезмерную нормальную силу. Таким образом, несмотря на то, что это не важно для работы трактора (или настоящего изобретения), идеальное значение для нормальной силы составляет FN=FT/µ особенно, когда трактор движется в открытой, не вертикальной или сильно отклоняющейся скважине.
Если скважинные условия меняются не часто и для трактора нет существенных факторов помех, таких, которые могут существовать в обсаженной скважине, то нормальная сила может эффективно корректироваться оператором путем отправки команд с поверхности в трактор с использованием существующей технологии. Однако когда величина требуемой тяги меняется часто, как в открытой скважине или из-за существующих факторов помех, оператор вряд ли будет реагировать в достаточной мере, достаточно часто или быстро, что приведет к чрезмерному проскальзыванию и, таким образом, ухудшению производительности трактора, и/или чрезмерной подаче энергии на узлы привода. Примеры существующих скважинных тракторных технологий, не придающих большого значения обеспечению достаточного или эффективного управления тягой в таких примерах, раскрыты в патенте США №6089323, 18 июля 2000 г., Newman и другие, и №5184676, 9 февраля 1993 г., Graham и другие. Примерами существующей технологии управления тягой для совершенно разных применений, не относящихся к скважинным тракторам, являются патент США №6387009 В1, 14 мая 2002 г., Haka и патент Германии №19718515, 26 марта 1998 г., Bellgardt. Каждый из выше упомянутых патентов полностью включен сюда посредством ссылки.
Таким образом, остается необходимость в способах, устройствах и/или системах, которые были бы полезными для скважинных тракторов и имели одну или несколько из следующих характеристик, возможностей или признаков: непрерывная регулировка нормальной силы на одном или нескольких узлах привода автоматически, без вмешательства человека, в режиме реального времени, или их комбинации; оптимизация тяги узла(ов) привода в скважине путем регулировки или управления нормальной силой; прикладывание как можно большей нормальной силы, необходимой для уменьшения проскальзывания, и как можно меньшей нормальной силы, необходимой для минимизации бесполезных затрат доступной энергии; регулировка нормальной силы как можно быстрее без необходимости вмешательства человека; реагирование или отработка характерных факторов помех путем регулирования нормальной силы на узле(ах) привода; регулировка в режиме реального времени нормальных сил на узле(ах) привода для поддержания или приведения в движение трактора в скважине; обеспечение непрерывного движения трактора, которое может быть желательным или потребоваться в скважинных каротажных применениях, на предельно низкой эффективной нормальной силе; предотвращение чрезмерного или излишнего износа компонентов, потери энергии и повреждения обсадной колонны или формации, вызванные чрезмерными нормальными силами.
Краткое описание изобретения
Согласно изобретению создан способ регулирования тяги скважинного трактора в скважине, создаваемой путем приложения нормальной силы к, по меньшей мере, одному узлу привода, связанному с трактором и способному соприкасаться с и перемещаться относительно стенки скважины, содержащий следующие этапы:
измерение скорости, по меньшей мере, одного узла привода;
измерение скорости трактора;
определение проскальзывания, по меньшей мере, одного узла привода на основании скорости, по меньшей мере, одного узла привода и скорости трактора;
сравнение проскальзывания, по меньшей мере, одного узла привода с приемлемым значением проскальзывания для определения чрезмерного проскальзывания, по меньшей мере, одного узла привода;
увеличение нормальной силы на, по меньшей мере, одном узле привода при чрезмерном проскальзывании, по меньшей мере, одного узла привода.
Способ может дополнительно включать этап определения проскальзывания, по меньшей мере, одного узла привода ниже минимально приемлемого проскальзывания, и уменьшения нормальной силы на, по меньшей мере, одном узле привода, если проскальзывание, по меньшей мере, одного узла привода находится ниже минимально приемлемого проскальзывания.
Согласно изобретению создан способ динамического регулирования в режиме реального времени без вмешательства человека тяги скважинного трактора в скважине, создаваемой путем приложения нормальной силы к, по меньшей мере, одному узлу привода, связанному с трактором, способному соприкасаться с и перемещаться относительно стенки скважины, содержащий изменение нормальной силы, приложенной к, по меньшей мере, одному узлу привода в ответ на подходящее изменение, по меньшей мере, одного из следующих факторов: диаметра скважины, наличия осыпи в скважине, одного или нескольких свойств скважинной текучей среды, поверхности скважины, угла наклона скважины, одного или нескольких свойств стенки скважины, фактического проскальзывания, по меньшей мере, одного узла привода относительно стенки скважины, коэффициента трения, по меньшей мере, между одним узлом привода и стенкой скважины и сопротивления, создаваемого кабелем, соединенным с трактором.
Согласно изобретению создан способ оптимизации величины энергии, требуемой для поддержания перемещения в скважине скважинного трактора, содержащего, по меньшей мере, один узел привода, способный соприкасаться с и перемещаться относительно стенки скважины, включающий автоматическое изменение нормальной силы, приложенной к, по меньшей мере, одному узлу привода, без вмешательства человека в ответ на одно или несколько изменений, по меньшей мере, одного из следующих факторов: диаметра скважины, наличия осыпи в скважине, одного или нескольких свойств скважинной текучей среды, поверхности скважины, угла наклона скважины, одного или нескольких свойств стенки скважины, фактического проскальзывания, по меньшей мере, одного узла привода относительно стенки скважины, коэффициента трения между, по меньшей мере, одним узлом привода и стенкой скважины и сопротивления, создаваемого кабелем, соединенным с трактором.
Согласно изобретению создано устройство для регулирования тяги скважинного трактора, способного перемещаться в скважине, содержащее, по меньшей мере, один модуль привода, включающий в себя, по меньшей мере, один узел привода, способный соприкасаться с и перемещаться относительно стенки скважины, при этом, по меньшей мере, один модуль привода способен определять скорость, по меньшей мере, одного узла привода в скважине и прикладывать нормальную силу к, по меньшей мере, одному узлу привода для приведения, по меньшей мере, одного узла привода в соприкосновение с и перемещение относительно стенки скважины, и по меньшей мере, один измерительный узел, способный определять скорость трактора в скважине, и, по меньшей мере, один модуль привода способен изменять нормальную силу на, по меньшей мере, одном узле привода на основании скорости трактора и скорости, по меньшей мере, одного узла привода.
По меньшей мере, один модуль привода может включать в себя, по меньшей мере, один генератор нормальной силы, способный прикладывать нормальную силу к, по меньшей мере, одному узлу привода, и, по меньшей мере, один контроллер нормальной силы, способный воздействовать на, по меньшей мере, один генератор нормальной силы для изменения величины нормальной силы, приложенной к, по меньшей мере, одному узлу привода.
По меньшей мере, один измерительный узел может включать в себя, по меньшей мере, один формирователь измерительного узла и, по меньшей мере, один измеритель скорости, способный измерять скорость трактора в скважине, при этом формирователь измерительного устройства способен принимать и обрабатывать данные о скорости трактора от, по меньшей мере, одного измерителя скорости.
По меньшей мере, один измерительный узел может включать в себя, по меньшей мере, один передающий узел, по меньшей мере, один принимающий узел и, по меньшей мере, один узел вычисления эффекта Доплера, соединенный с, по меньшей мере, одним передающим узлом и, по меньшей мере, одним принимающим узлом и способный определять скорость трактора в скважине на основании данных, принятых от, по меньшей мере, одного передающего узла и, по меньшей мере, одного принимающего узла.
Согласно изобретению создана автоматизированная система для регулирования тяги скважинного трактора, создаваемой путем приложения нормальной силы к одному или нескольким элементам, соединенным с трактором и способным соприкасаться со стенкой скважины, содержащая, по меньшей мере, два модуля привода, способных создавать и прикладывать нормальную силу к, по меньшей мере, одному элементу, связанному с трактором, и перемещать трактор в скважине, по меньшей мере, один измерительный узел, способный многократно определять, по меньшей мере, одну из следующих величин: скорость трактора в скважине и диаметр скважины, и главный контроллер в соединении с, по меньшей мере, двумя модулями привода и, по меньшей мере, одним измерительным узлом, при этом, по меньшей мере, один модуль привода способен изменять величину нормальной силы, необходимой для перемещения трактора в скважине, на основании, по меньшей мере, частично сигналов, принимаемых от главного контроллера.
Система может дополнительно включать, по меньшей мере, один перемещаемый инструмент, соединенный с трактором для доставки его в скважину посредством трактора.
Краткое описание чертежей
Для подробного описания предпочтительных вариантов изобретения будут рассмотрены прилагающиеся чертежи, на которых изображено следующее:
фиг.1 является частичной блок-схемой скважинного трактора, оснащенного вариантом осуществления системы управления тягой в соответствии с настоящим изобретением;
фиг.2 является блок-схемой, показывающей различные примеры входов, выходов и факторов помех примерного трактора на фиг.1;
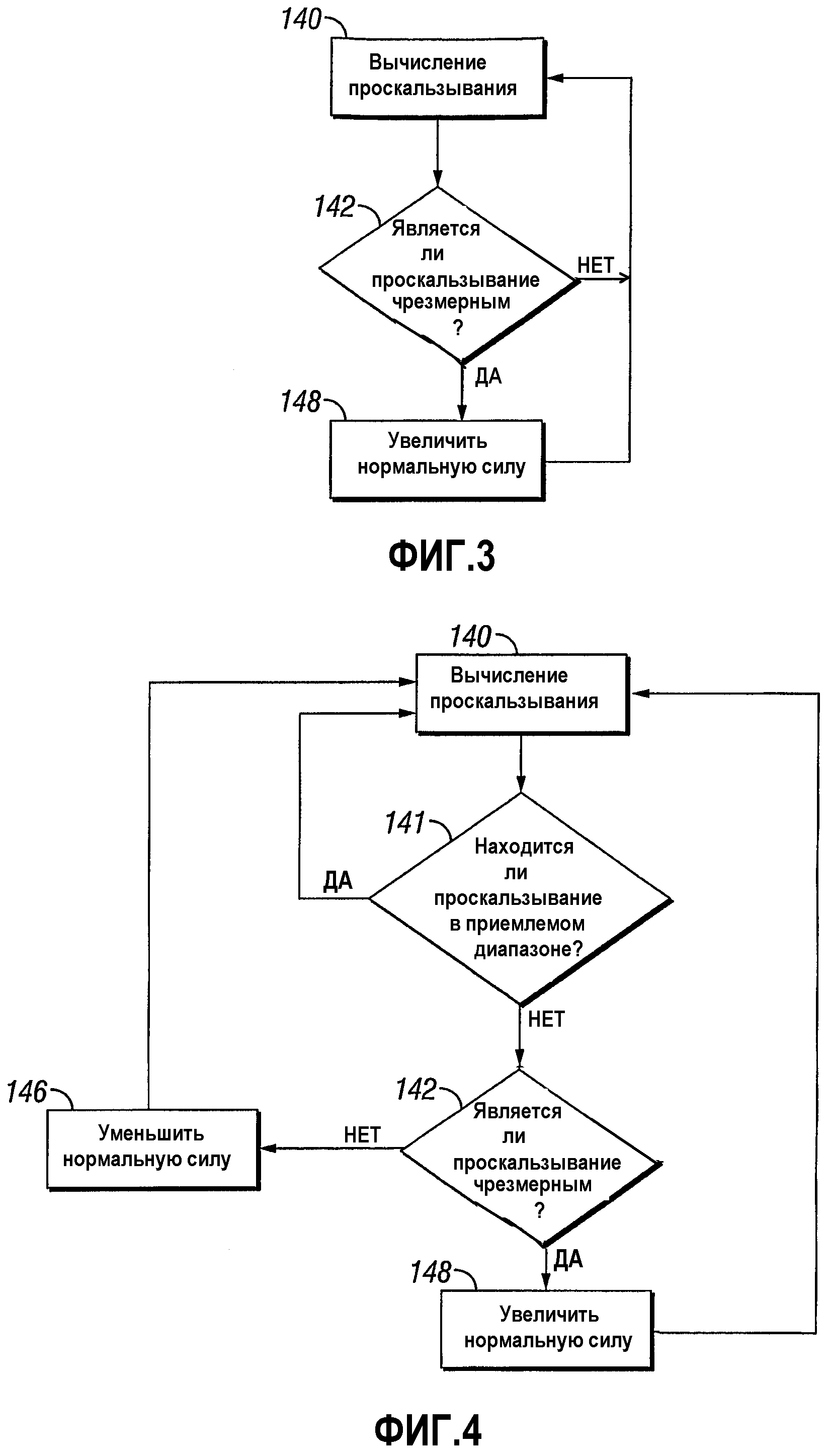
фиг.3 является блок-схемой, иллюстрирующей вариант осуществления способа регулирования тяги в соответствии с настоящим изобретением;
фиг.4 является блок-схемой, иллюстрирующей другой вариант осуществления способа регулирования тяги в соответствии с настоящим изобретением;
фиг.5 является обобщенным представлением в частичной блок-схеме варианта осуществления узла измерения скорости трактора в соответствии с настоящим изобретением, размещенного в скважине;
фиг.6 является частичной блок-схемой варианта осуществления измерительного узла в соответствии с настоящим изобретением, размещенного в скважине;
фиг.7 является частичной блок-схемой другого варианта осуществления измерительного узла в соответствии с настоящим изобретением, размещенного в скважине;
фиг.8 является частичной блок-схемой еще одного варианта осуществления измерительного узла в соответствии с настоящим изобретением, размещенного в скважине;
фиг.9 является обобщенным представлением в частичной блок-схеме варианта осуществления модуля привода в соответствии с настоящим изобретением, размещенного в скважине;
фиг.10 является частичной блок-схемой варианта осуществления модуля привода в соответствии с настоящим изобретением, размещенного в скважине;
фиг.11 является частичной блок-схемой другого варианта осуществления модуля привода в соответствии с настоящим изобретением, размещенного в скважине;
фиг.12 является частичной блок-схемой еще одного варианта осуществления модуля привода в соответствии с настоящим изобретением, размещенного в скважине;
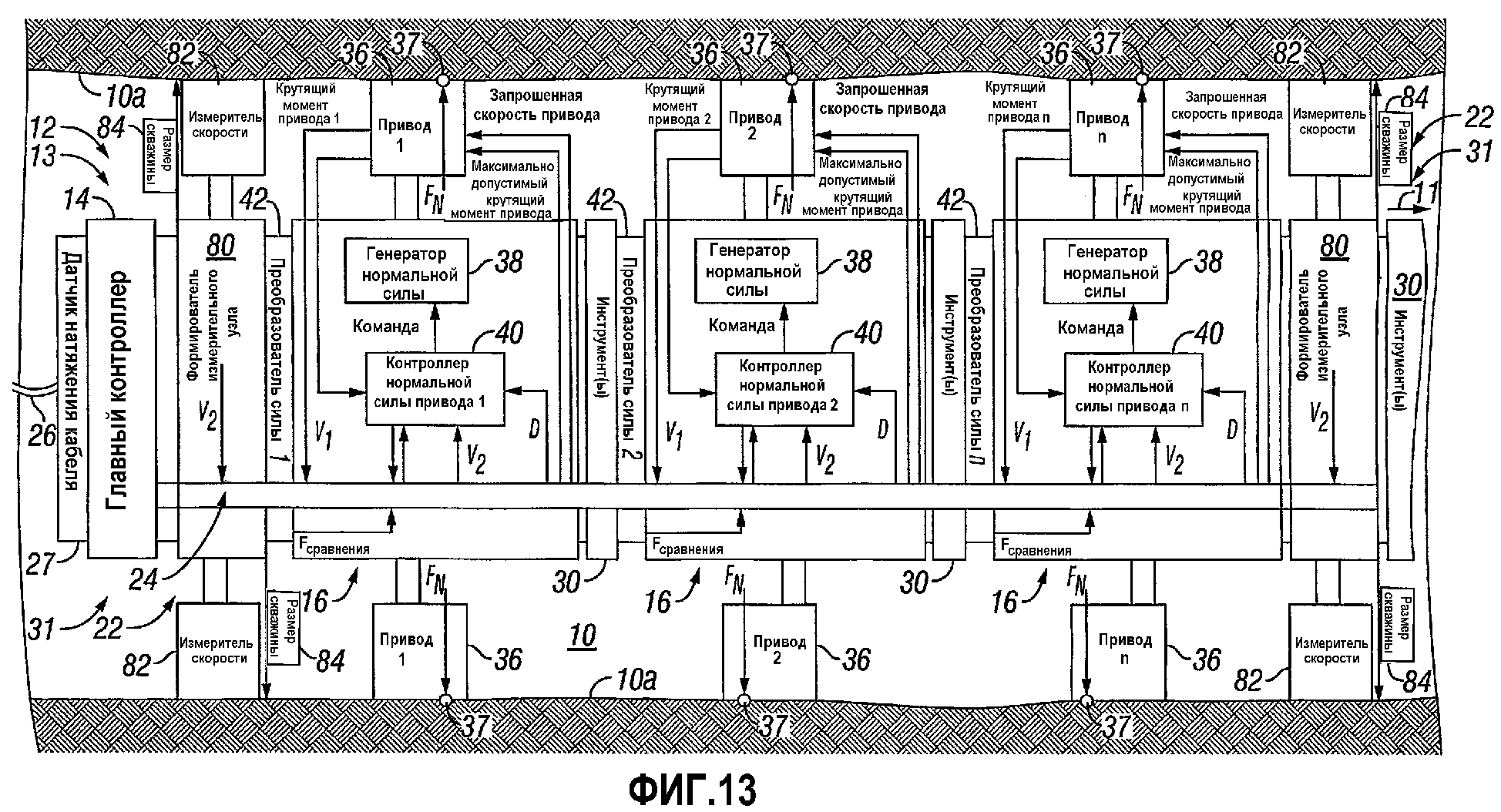
фиг.13 является частичной блок-схемой двунаправленного скважинного трактора, оснащенного вариантом осуществления системы управления тягой, имеющим, по меньшей мере, три модуля привода в соответствии с настоящим изобретением;
фиг.14 является блок-схемой алгоритма, иллюстрирующей входы и выходы различных компонентов варианта осуществления системы управления тягой в соответствии с настоящим изобретением;
фиг.15 является блок-схемой алгоритма, иллюстрирующей входы и выходы внутренней модульной структуры варианта осуществления главного контроллера в соответствии с настоящим изобретением.
Подробное описание предпочтительных вариантов осуществления изобретения
Предпочтительные варианты осуществления изобретения будут показаны на ранее упомянутых чертежах и подробно описаны ниже. Следует понимать, что прилагаемые чертежи и описание приведены здесь для иллюстрации предпочтительных вариантов осуществления и не предназначены для ограничения изобретения или прилагаемой формулы изобретения. Наоборот, изобретение охватывает все модификации, эквиваленты и альтернативы, попадающие в сущность и объем изобретения, как определяется прилагаемой формулой изобретения. При показе и описании предпочтительных вариантов осуществления одинаковые или идентичные ссылочные номера используются для идентификации общих или подобных элементов. Чертежи не обязательно выполнены в масштабе, и некоторые части, и некоторые виды чертежей могут быть показаны в увеличенном масштабе или схематически в интересах ясности и краткости.
Используемые здесь термины «изобретение», «настоящее изобретение» и их вариации не предназначены для обозначения заявленного изобретения по любому конкретному прилагаемому пункту или пунктам формулы изобретения или всем пунктам формулы изобретения. Предмет или тема каждого такого упоминания, таким образом, не обязательно является частью или требуется любым конкретным пунктом(ами) только в силу такого упоминания.
На фиг.1 показан в виде блок-схемы вариант осуществления скважинного трактора 12, размещенного в скважине 10, оснащенного примерной системой 13 управления тягой настоящего изобретения. Показанный трактор 12 включает главный контроллер 14, множество модулей 16 привода и измерительный узел 22. Каждый из модулей 16 привода включает в себя, по меньшей мере, один узел привода (не показан) и смещает или перемещает трактор 12 и любые присоединенные устройства, такие как один или несколько инструментов 30, перемещаемых через скважину 10. Перемещаемые инструменты 30 показаны размещенными перед трактором 12 и системой 13 управления тягой относительно направления движения 11 трактора 12 в скважине 10. Однако перемещаемые инструменты 30 или другие устройства могут быть размещены позади или вплотную к трактору 12, или размещены между различными компонентами трактора 12 и/или системой 13 управления, или их комбинацией. Более того, присоединение перемещаемых инструментов или других устройств не является необходимым.
На фиг.1 показан измерительный узел 22 данного варианта осуществления, который определяет скорость трактора 12 в скважине 10. Если необходимо, измерительный узел 22 может измерять, вместо или только, другую информацию, такую как диаметр D скважины 10, шероховатость и так далее. Данные и команды могут пересылаться между главным котроллером 14 и модулями 16 привода и измерительным узлом 22 через шину 24 данных. Главный контроллер 14 может соединяться с поверхностью (не показана) и, наоборот, через кабель 26 и пользовательский интерфейс 28. Например, данные или команды (например, запрошенная начальная скорость трактора) может быть передана оператором или наземным устройством главному контроллеру 14, и информация (например, количество активных узлов привода) может быть передана от контроллера 14 на поверхность. Различные пути передачи данных этого изобретения в основном показаны стрелками 29.
Главный контроллер 14, модули 16 привода, измерительный узел 22 и другие примерные компоненты могут быть любого требуемого типа и конфигурации. Более того, конкретные компоненты и конфигурация на фиг.1 не являются необходимыми и не ограничивают настоящее изобретение. Например, в то время как показаны три модуля 16 привода и один измерительный узел 22, трактор 12 может включать в себя любое количество модулей привода и измерительных узлов. В качестве другого примера, в то время как главный контроллер 14 и измерительный узел 22 показаны расположенными внутри трактора 12, они могут быть вместо этого расположены на поверхности 12 или внутри кабеля 26 или другого компонента. Далее, любой из главного контроллера 14, модуля(ей) 16 привода, измерительного узла 22, шины 24 данных, кабеля 26 и интерфейса 28 кабеля могут не быть различными компонентами, но вместо этого их функциональность может выполняться, может быть встроена или интегрирована в одну или более других частей или компонентов. «Модуль привода», например, может не быть отдельным модулем, но может быть любой конфигурацией компонентов, способных генерировать и прикладывать нормальную силу к компоненту для перемещения трактора в скважине.
Как показано на фиг.2, трактор 12 варианта осуществления на фиг.1 имеет различные входы, выходы и факторы помех. Примерные входы включают в себя энергию 120 и запрошенные настройки 122 скорости трактора. Энергия может быть электрической или гидравлической, или любой другой требуемой энергией, способной достаточно питать трактор и/или систему управления тягой. Некоторые примерные потенциальные выходы включают в себя скорость 130 трактора, силу 132 тяги, нормальную силу, приложенную к узлу(ам) 134 привода, и рассеиваемое тепло 136. Некоторыми примерными факторами помех, которые могут воздействовать на трактор 12 в скважине, влиять на его тягу и, таким образом, снижать его способность эффективно перемещаться через скважину, являются ограничения 124 размера скважины, угол 126 наклона скважины и изменения коэффициента 128 трения. Однако эти конкретные входы, выходы и факторы помех не являются необходимыми и не ограничивают настоящее изобретение.
В соответствии с настоящим изобретением нормальная сила на узле(ах) привода регулируется если необходимо, по мере того как трактор движется через скважину, для установления или поддержания тяги, или для достижения или поддержания конкретной скорости трактора.
В соответствии с одним вариантом осуществления изобретения, ссылаясь на блок-схему на фиг.3, когда скважинный трактор (не показан) размещается в скважине, получается значение для фактического проскальзывания SA узла(ов) привода (этап 140). Фактическое проскальзывание SA может быть обнаружено или определено любым желаемым способом. В некоторых вариантах осуществления, например, определяются фактическая скорость V1 узла(ов) привода и фактическая скорость V2 трактора, проскальзывание SA вычисляется на основании формулы SA=(V1-V2)/V1. В качестве другого примера, фактическое проскальзывание SA может быть обнаружено на основании формулы SA=V1-V2.
В варианте осуществления, показанном на фиг.3, величина проскальзывания для узла(ов) привода этого примера оценивается на этапе 142 для определения того, является ли она чрезмерной. Например, фактическое проскальзывание SA может сравниваться с оптимальной, требуемой или приемлемой величиной или диапазоном проскальзывания S0 («приемлемое проскальзывание»). Приемлемое проскальзывание
S0 может быть обеспечено или обнаружено любым желаемым способом. Например, в одном варианте осуществления приемлемое проскальзывание получится, когда производная от η по s (dη/ds)=0, где η=(Сила) (V2)/входная мощность. Если узел привода является электрическим, например, «сила» и «входная мощность» могут быть вычислены на основе крутящего момента или динамометрического датчика, тока и напряжения на соответствующем узле привода. Если проскальзывание SA узла привода является чрезмерным, нормальная сила FN на узле(ах) привода увеличивается на этапе 148. Описанный выше процесс повторяется непрерывно и нормальная сила FN, приложенная к узлу(ам) привода, автоматически увеличивается каждый раз при обнаружении чрезмерного проскальзывания (если требуется на всем протяжении движения трактора в скважине). Если необходимо, эта методология может быть повторена в режиме реального времени. Как используется здесь и в прилагаемой формуле изобретения, термин «реальное время» и его вариации означают фактически в реальном времени, почти в реальном времени или часто. Как используется здесь и в прилагаемой формуле изобретения, термин «автоматический» и его вариации означают способность выполнять соответствующую задачу(и) без привлечения человека или его вмешательства. Частота повторений этого процесса может быть заданной или меняться по необходимости. Например, частота повторений может быть установлена или изменена на основании конкретных скважинных условий или одного или более факторов помех.
В некоторых вариантах осуществления, если требуется, нормальная сила FN на узле(ах) привода может, вместо или также, быть регулируемой в целях оптимизации использования энергии, предотвращения чрезмерного увеличения нормальной силы(сил), поддержания постоянной скорости трактора или для любой другой необходимой цели.
Например, в варианте осуществления, представленном на диаграмме на фиг.4, проскальзывание SA определяется и сравнивается с приемлемым диапазоном проскальзывания на этапе 141. Если фактическое проскальзывание SA находится в пределах приемлемого диапазона проскальзывания, то определение повторяется непрерывно по необходимости. Каждый раз, когда проскальзывание SA находится за пределами приемлемого диапазона проскальзывания, проскальзывание SA сравнивается с максимальным значением проскальзывания на этапе 142. Если проскальзывание SA превышает максимальное значение проскальзывания (чрезмерное проскальзывание), нормальная сила FN на узле(ах) привода увеличивается на этапе 148. Если нет (проскальзывание SA находится ниже приемлемого диапазона проскальзывания), то нормальная сила FN на том узле(ах) привода уменьшается на этапе 146. В варианте осуществления на фиг.4 нормальная сила FN, таким образом, динамически, автоматически регулируется для приложения такой нормальной силы FN, которая является необходимой. В других вариантах осуществления (не показаны) могут существовать обстоятельства, при которых желательно оптимизировать использование энергии путем уменьшения нормальной силы, когда фактическое проскальзывание SA находится ниже приемлемого значения или диапазона проскальзывания, но не увеличения нормальной силы, когда проскальзывание является чрезмерным.
Любые подходящие компоненты и техники управления, связи, измерения и привода могут быть использованы с любым типом скважинного трактора для выполнения методологии управления тягой настоящего изобретения.
Фиг.5 является обобщенным представлением в виде частичной блок-схемы варианта осуществления измерительного узла 22, размещенного в скважине 10. Измерительный узел 22 может быть установлен как это необходимо. Например, измерительный узел 22 может быть выровнен с узлами привода (не показаны), установлен вдоль, включен внутрь или отдельно от трактора 12 или колонны 31 инструмента, или комбинированно. Если измерительный узел 22 расположен перед узлом(ами) 16 привода относительно направления перемещения 11 трактора 12 в скважине 10 (фиг.1), информация, полученная измерительным узлом 22, такая как, например, диаметр скважины, может быть использована в определении регулировки нормальной силы, предваряя наступающие скважинные условия для узла привода. Дополнительно, множество измерительных узлов 22 могут быть необходимыми в различных случаях, таких как использование двунаправленного трактора.
На фиг.5 показан измерительный узел 22, включающий в себя пару измерителей 82 скорости для измерения скорости трактора 12. В то время как показаны два измерителя 82 скорости, может быть добавлено любое их количество. Этот вариант осуществления также включает в себя детектор 84 размера скважины, способный измерять диаметр скважины 10. Формирователь 80 измерительного узла показан принимающим и обрабатывающим данные от измерителей 82 скорости (и детектора 84 размера скважины) и передающим данные главному контроллеру 14.
Фиг.6-8 показывают некоторые примеры в виде частичной блок-схемы конкретных типов измерительных узлов 22, размещенных в скважине 10. В варианте осуществления на фиг.6 измерительный узел 22 включает в себя пару роликов 86, датчиков 88, 90 угла и вычислительного узла 92. Такая двойная система позволяет осуществлять коррекцию проскальзывания и вычисление диаметра скважины, однако, может быть использовано любое количество одного или нескольких роликов 86 и датчиков 88, 90 угла. Ролики 86 в этом варианте смонтированы на подпружиненных отклоняющихся роликовых штангах 114 для прижимания их к стенке 10а скважины и предотвращения чрезмерного проскальзывания роликов 86. Датчики 88, 90 угла обнаруживают угол между трактором 12 и штангами 114, и ролики 86 измеряют свою собственную скорость вращения в скважине 10. Вычислительный узел 92 рассчитывает фактическую скорость трактора и, если требуется, диаметр скважины на основании длины штанг 114 и углов Δ1 и Δ2.
В варианте осуществления, показанном на фиг.7, скорость трактора и, если требуется, диаметр скважины определяются с использованием эффекта Доплера. Этот вариант осуществления включает в себя узел 94 вычисления эффекта Доплера, передающий узел 96 и принимающий узел 98. Передающий узел 96 непрерывно передает импульсы 100 на определенной частоте в стенку 10а скважины. Импульсы отражаются обратно от стенки 10а скважины на принимающий узел 98 под определенным углом Е 102. Импульсы 100 могут быть любого подходящего типа, такого как, например, электромагнитные или акустические импульсы. Узел 94 вычисления эффекта Доплера вычисляет скорость трактора на основании разности частот. Если необходимо, узел 94 вычисления также вычисляет диаметр скважины на основании угла Е 102. Пример компонентов и методологии, которые могут быть использованы для измерения скорости на основании эффекта Доплера, показаны и описаны в патенте США №6445337, 3 сентября 2002, Reiche, который полностью включен сюда посредством ссылки.
Фиг.8 показывает вариант осуществления измерительного узла 22, который включает в себя акселерометр 104 и интегратор 106. Акселерометр 104 непрерывно измеряет ускорение трактора 12, информация о котором интегрируется интегратором 106 для определения скорости трактора.
На фиг.9 показано в виде частичной блок-схемы обобщенное представление варианта осуществления модуля 16 привода, размещенного в скважине 10. Показанный модуль 16 привода включает в себя два узла 36 привода, каждый из которых вдавлен генератором 38 нормальной силы в стенку 10а скважины с помощью интерфейса 37. Генератор 38 нормальной силы может быть любым подходящим устройством, например электрически, гидравлически, пружинно или механически приводимое в действие устройство. Следует понимать, что модуль 16 привода не требует двух узлов 36 привода, но может включать в себя любое необходимое количество одного или более узлов 36 привода.
В этом варианте генератор 38 нормальной силы управляется контроллером 40 нормальной силы, который многократно определяет проскальзывание соответствующего узла 36 привода, как это описано выше. Как только проскальзывание становится чрезмерным, контроллер 40 заставляет генератор 38 нормальной силы увеличивать нормальную силу на узле(ах) 36 привода до тех пор, пока проскальзывание не будет определено контроллером 40 как не чрезмерное. Также, если требуется, когда проскальзывание падает ниже минимально допустимого уровня, контроллер 40 нормальной силы может быть предназначен для того, чтобы заставить генератор 38 нормальной силы увеличивать нормальную силу на узле(ах) 36 привода до тех пор, пока проскальзывание, определяемое контроллером 40, не будет приемлемым. Этот процесс продолжается столько, сколько необходимо эффективное перемещение трактора в скважине. Контроллер 40 нормальной силы этого варианта осуществления, таким образом, управляет динамическим приложением нормальной силы к узлу(ам) 36 привода посредством генератора 38 нормальной силы.
Один или несколько преобразователей 42 силы также включены в этот вариант для обеспечения информации о силе тяги каждого узла 36 привода. Эта информация может быть использована для любых требуемых целей, таких как помощь в распределении нагрузки между множеством узлов привода. Однако преобразователи и распределение нагрузки между множеством узлов привода не являются необходимыми.
На фиг.9 показаны различные потенциальные потоки данных между компонентами данного варианта осуществления стрелками 29. Например, контроллер 40 нормальной силы показан принимающим скорость V1 узла привода от узлов 36 привода и скорость V2 трактора от главного контроллера 14 для определения фактического проскальзывания SA узла привода. Контроллер 40 нормальной силы показан обеспечивающим генератор 38 нормальной силы командами для приложения или удаления нормальной силы к узлу 36 привода.
Для некоторых необязательных примеров узлы 36 привода обеспечивают крутящий момент узла привода для главного контроллера 14 для определения распределения нагрузки, обеспечивая информацию о скважинных условиях или для любых других подходящих целей. Узлы 36 привода могут быть оснащены внутренними механизмами управления скоростью и могут принимать запрошенные установки скорости через главный контроллер 14 от оператора или другого источника. В другом необязательном примере главный контроллер 14 показан обеспечивающим данные о диаметре скважины для контроллера 40 нормальной силы для определения величины нормальной силы, которая должна быть приложена к узлам 36 привода. Например, нормальная сила может быть уменьшена, упреждая наступающее скважинное ограничение. Однако другие или отличные данные могут быть переданы между различными компонентами. Приведенные выше примеры потоков данных не являются необходимыми и не ограничивают настоящее изобретение. Фиг.10-12 показывают различные конкретные варианты в виде частичной блок-схемы осуществления модуля 16 привода, размещенного в скважине 10. В варианте на фиг.10 узел 36 привода включает в себя двигатель 54 привода, трансмиссию 56 и множество зубчатых колес 64. Трансмиссия 56 имеет трансмиссионное колесо 58, трансмиссионную цепь 60 и кронштейн 62, которые приводят в движение зубчатые колеса 64. Зубчатые колеса 64 перемещают приводную цепь 66, которая соприкасается со стенкой 10а скважины и передает ведущий крутящий момент от двигателя 54 привода к стенке 10а скважины и смещает трактор 12.
Показанный на фиг.10 генератор 38 нормальной силы этого варианта осуществления включает двигатель 44 нормальной силы и линейный привод 46. Линейный привод 46 может быть механическим, электромагнитным, гидравлическим или любого другого подходящего типа. Если необходимо, линейный привод может быть оснащен элементом 52 подвески и устройством 50 измерения нагрузки, таким как динамометрический датчик. Кронштейн 62 проходит между концом 112 линейного привода 46 и зубчатым колесом(ами) 64.
Линейный привод 46 преобразует вращательное движение двигателя 54 нормальной силы в линейное движение. Линейная сила, сгенерированная линейным приводом 46, преобразуется в нормальную силу, которая оказывает давление на приводную цепь 66 в направлении стенки 10а скважины. Это преобразование силы осуществляется на штифте или соединении 110, расположенном на переднем конце 112 линейного привода 46, и которая может перемещаться в пазу 108 в модуле 16 привода. Таким образом, увеличение линейной силы, генерируемой генератором 38 нормальной силы, перемещает соединение 110 вперед в пазу 108, уменьшая тем самым нормальную силу, приложенную к зубчатым колесам 64. Таким же образом нормальная сила будет увеличена, когда линейная сила, приложенная к соединению 110, уменьшится.
Как показано на фиг.11, узел 36 привода является в основном таким же, как узел 36 привода варианта осуществления на фиг.10, за исключением той части, что соприкасается со стенкой 10а скважины. В этом варианте, по меньшей мере, одно колесо 68 привода приводится в движение трансмиссионной цепью 60 и кронштейном 62 и соприкасается со стенкой 10а скважины для смещения трактора 12. Когда имеется множество колес 68 привода, крутящий момент привода может быть передан на колеса 68 привода с помощью шестерен 70, расположенных между колесами 68 привода. Генератор 38 нормальной силы в этом примере работает подобно тому, который показан и описан со ссылкой на фиг.10, но в этом случае относительно колес 68 привода.
В варианте осуществления на фиг.12 модуль 16 привода включает в себя зажимный агрегат 72, который может перемещаться вперед и назад на валу 76, приводимый в движение двигателем 54 привода и линейным приводом 78, расположенными внутри вала 76. Вал 76 осуществляет возвратно-поступательное движение между рабочим ходом и обратным ходом. Зажимный агрегат 72 включает в себя, по меньшей мере, одну зажимную опору 74, которая соприкасается со стенкой 10а скважины и скользит вдоль нее. Использование технологии зажимного типа для перемежения скважинных тракторов раскрыто в патенте США №6179055, 30 января 2001, Sallwasser и другие, который включен сюда по ссылке во всей своей полноте.
Генератор 38 нормальной силы этого варианта осуществления является в основном таким же, как и описанный выше со ссылкой на фиг.10. Однако вместо приложения непрерывной нормальной силы на зубчатые колеса, нормальная сила прикладывается к зажимной опоре 74 этого варианта осуществления. Во время рабочего хода вала 76 зажимной агрегат 72 и зажимная опора 74 являются неподвижными относительно скважины 10. Последовательно нормальная сила, приложенная к зажимной опоре 74 генератором 38 нормальной силы, должна быть достаточной для преодоления потери тяги. Во время обратного движения вала 76 нормальная сила может быть нежелательной, чтобы уменьшить сопротивление и избежать износа компонентов.
На фиг.13 показан вариант осуществления двунаправленного скважинного трактора 12, размещенного в скважине 10, оснащенного примерной системой 13 управления тягой настоящего изобретения. Трактор 12 включает в себя, по меньшей мере, три модуля 16 привода (модуль 1 привода, модуль 2 привода, модуль N привода), каждый подобен модулю 16 привода, описанного выше со ссылкой на фиг.9. Измерительный узел 22, подобный описанному выше со ссылкой на фиг.5, включен в каждом конце трактора 12. Главный контроллер 14 связывается с различными компонентами системы управления натяжения через шину 24 данных. Кабель 26 и датчик 27 натяжения кабеля обеспечивает связь между главным контроллером 14 и поверхностью (не показана). Главный контроллер 14, контроллер 40 нормальной силы и формирователь 80 измерительного узла могут быть электрическими, механическими, гидравлическими или приводиться в действие любой другой подходящей технологией или техникой, или их комбинацией.
В варианте осуществления на фиг.13 имеется множество (необязательное) преобразователей 42 силы для измерения и сравнения силы тяги различных узлов 36 привода. Данные сравнения силы (Fсравнения) передаются главному контроллеру 14 для любого необходимого использования, такого как распределение нагрузки между узлами привода для повышения эффективности. Также, множество перемещаемых устройств или инструментов 30 показаны размещенными между модулями 16 привода и передней частью трактора 12 в показанной колонне 31 инструментов.
Блок-схема на фиг.14 показывает пример входа и выходов различных компонентов варианта осуществления системы 13 управления тягой скважинного трактора для использования в скважине (не показана) в соответствии с настоящим изобретением. Каждый (один или более) модуль 16 привода включает в себя узел 36 привода, генератор 38 нормальной силы и контроллер 40 нормальной силы. Различные измерительные инструменты, такие как устройство 27 для измерения натяжения кабеля, устройство 116 для измерения силы тяги, детектор 84 размера скважины и узел 22 для измерения скорости трактора, обеспечивают информацию, такую как натяжение кабеля, сила тяги, диаметр D1 скважины и скорость V2 трактора, соответственно на непрерывной или повторяющейся основе главному контроллеру 14 и пользовательскому интерфейсу 28.
Главный контроллер 14 связывается с оператором или поверхностью с помощью пользовательского интерфейса 28. Различная информация может быть передана между главным контроллером 14 и пользовательским интерфейсом 28. Например, команды, такие как запрошенная скорость V1 узла привода, может быть передана из пользовательского интерфейса 28 главному контроллеру 14. Главный контроллер 14 этого варианта осуществления может принимать или подавлять такие команды на основании одного или более условий или обстоятельств. Если запрошенная скорость
V1 узла привода принимается главным контроллером 14, контроллер 14 передаст эту команду на конкретные узлы 36 привода. Если требуется, этот запрос может быть сделан только при стартовых операциях или в определенные моменты во время работы. Главный контроллер 14 может обеспечивать дополнительную информацию, такую как максимально допустимый крутящий момент, для каждого узла 36 привода.
Главный контроллер 14 уведомляет каждый контроллер 40 нормальной силы о скорости V2 трактора и соответствующем диаметре D1 скважины. Каждый контроллер 40 нормальной силы дает команды своему соответствующему генератору 38 нормальной силы для приложения требуемой нормальной силы к соответствующему узлу 36 привода. Контроллеры 40 нормальной силы также обеспечивают сигнал обратной проверки для главного контроллера 14. Сигнал обратной проверки может быть использован главным контроллером 14 для информации каротажа, такой как фактический коэффициент трения. Также, в этом примере, каждый узел 36 привода уведомляет главный контроллер 14 о своем фактическом крутящем моменте. Следует понимать, однако, что каждый из вышеприведенных примерных входов, выходов и передачи данных не является необходимым.
Дополнительные компоненты, возможности и/или признаки могут быть включены в систему управления тягой настоящего изобретения для обеспечения дополнительных функций. Например, на фиг.15 показан вариант осуществления главного контроллера 14, включающего в себя наземный интерфейс 150, вычислитель 32 размера скважины и модуль 34 распределения силы. Наземный интерфейс 150 связывается с пользовательским интерфейсом 28. Вычислитель 32 размера скважины рассчитывает диаметр скважины на основании измерений детектора размера скважины (не показан). Модуль 34 распределения силы балансирует распределение нагрузки между множеством узлов 36 привода. Этот признак может быть нужен, например, для улучшения способности трактора преодолевать различные препятствия, такие как промоины, сужения скважины и преграды. Примерный модуль 34 распределения силы требует сигналы обратной проверки, представляющие собой значения силы, измеренной преобразователями (не показаны) и значениями натяжения кабеля.
Предпочтительные варианты осуществления настоящего изобретения, таким образом, предлагают преимущества по отношению к предшествующему уровню техники и являются хорошо приспосабливаемыми для выполнения одной или более целей изобретения. Однако настоящее изобретение не требует каждого из компонентов и действий, описанных выше, и ни коим образом не ограничивает вышеописанные варианты осуществления и способы эксплуатации. В дополнение, описанные выше способы и любые другие способы, которые могут попадать в объем любого из пунктов прилагаемой формулы изобретения, могут быть выполнены в любом необходимом подходящем порядке, и необязательно должны быть ограничены описанной здесь последовательностью или приведенной в любом из пунктов прилагаемой формулы изобретения. Более того, способы настоящего изобретения не требуют использования конкретных вариантов осуществления, показанных и описанных в настоящей спецификации, но в равной степени применимы с любой другой подходящей структурой, формой и конфигурацией компонентов.
Настоящее изобретение не требует всех вышеуказанных компонентов, признаков или процессов. Любой один или более из указанных выше компонентов, признаков и процессов могут быть применены в любой подходящей конфигурации без включения туда других таких компонентов, признаков и процессов. Далее, в то время как предпочтительные варианты осуществления этого изобретения были показаны и описаны, много вариаций, модификаций и/или изменений системы, устройства и способов настоящего изобретения, таких как компоненты, подробности устройства и работы, расположение частей и/или способов использования, являются возможными, предусмотренными владельцем патента внутри объема прилагаемой формулы изобретения, и могут быть сделаны и использованы специалистом в данной области техники без выхода за рамки сущности или учения изобретения и объема прилагаемой формулы изобретения. Более того, настоящее изобретение включает в себя дополнительные признаки, возможности, функции, способы использования и применения, которые не были здесь специально упомянуты, но являются или станут понятными из приведенного здесь описания, прилагаемых чертежей и формулы изобретения.
Таким образом, весь материал, изложенный или показанный в прилагаемых чертежах, должен интерпретироваться как иллюстративный и неограничивающий. Исходя из этого объем изобретения и прилагаемая формула изобретения не ограничены описанными и показанными здесь вариантами осуществления.
Реферат
Группа изобретений относится к области бурения, а именно к способу, устройству и системе для перемещения инструментов и других устройств в скважине. Способ содержит следующие этапы: измерение скорости узла привода, измерение скорости трактора, определение проскальзывания узла привода на основании скорости узла привода и скорости трактора, сравнивание проскальзывания узла привода с приемлемым значением проскальзывания для определения чрезмерного проскальзывания узла привода, увеличение нормальной силы на узле привода при чрезмерном проскальзывании узла привода. Устройство содержит измерительный узел, способный определять скорость трактора в скважине, и модуль привода, включающий в себя узел привода, способный соприкасаться с и перемещаться относительно стенки скважины. Модуль привода способен определять скорость узла привода в скважине, прикладывать нормальную силу к узлу привода для приведения узла привода в соприкосновение с и перемещение относительно стенки скважины и изменять нормальную силу на узле привода на основании скорости трактора и скорости узла привода. Система содержит, по меньшей мере, два модуля привода, способных создавать и прикладывать нормальную силу к, по меньшей мере, одному элементу, связанному с трактором, и перемещать трактор в скважине, по меньшей мере, один измерительный узел, способный многократно определять, по меньшей мере, одну из следующих величин: скорость трактора в скважине и диаметр скважины, и главный контроллер в соединении с, по меньшей мере, двумя модулями привода и, по меньшей мере, одним измерительным узлом, при этом, по меньшей мере, один модуль привода спос
Формула
измерение скорости, по меньшей мере, одного узла привода;
измерение скорости трактора;
определение проскальзывания, по меньшей мере, одного узла привода на основании скорости, по меньшей мере, одного узла привода и скорости трактора;
сравнивание проскальзывания, по меньшей мере, одного узла привода с приемлемым значением проскальзывания для определения чрезмерного проскальзывания, по меньшей мере, одного узла привода;
увеличение нормальной силы на, по меньшей мере, одном узле привода при чрезмерном проскальзывании, по меньшей мере, одного узла привода.
Документы, цитированные в отчёте о поиске
Скважинный инструмент
Комментарии