Способ контроля состояния поворотной тележки рельсового транспортного средства, содержащей, по меньшей мере, одну колесную пару - RU2540362C2
Код документа: RU2540362C2
Чертежи


Описание
Изобретение касается контроля состояния поворотной тележки рельсового транспортного средства, содержащей, по меньшей мере, одну колесную пару, причем колеса колесной пары жестко соединены осью и имеют приближенно конический профиль колеса, согласно ограничительной части пунктов 1 и 4 формулы изобретения. В пункте 9 формулы изобретения раскрыто устройство для осуществления способа.
В железнодорожном транспорте сегодня применяется большое количество систем для диагностирования и контроля, с помощью которых регистрируются изменения состояния конструктивных элементов и узлов рельсового транспортного средства, чтобы обнаружить дефекты этих конструктивных элементов. В частности, в поворотных тележках рельсовых транспортных средств большой интерес представляет выявление недопустимого состояния износа в отношении надежности при эксплуатации.
В документе DE 102006001540 В3 раскрыт способ контроля состояния поворотных тележек рельсового транспортного средства, при котором колеса колесной пары поворотных тележек жестко соединены осями и имеют конический профиль колеса. При этом контролируется синусоидальный ход, по меньшей мере, одной колесной пары, который основывается на коническом профиле колес, и при отсутствии синусоидального хода подается сигнал о существовании опасности схода с рельсов колесной пары.
Этот способ, однако, позволяет выявление схода с рельсов колесных пар в зависимости от наличия синусоидального хода или его отсутствия в смысле двойного состояния, так как имеющийся синусоидальный ход создает характерный периодический сигнал, который после схода с рельсов полностью отсутствует. При этом с помощью известного способа, однако, не возможно какое-либо раннее оповещение, которое базировалось бы на наблюдении за медленным или скрытым изменением параметров поворотной тележки или состоянием износа.
Согласно документу DE 10020521 В4 контролируется характеристика колебаний, по меньшей мере, одного из компонентов рельсового транспортного средства. В указанном документе отдельные компоненты рельсового транспортного средства реагируют на возбуждение колебаний при работе собственными колебаниями определенной частоты, амплитудой и демпфированием. С помощью сравнения определенных фактических собственных колебаний с ожидаемыми и хранящимися в памяти в качестве заданного значения собственных колебаний делается заключение об изменившейся характеристике колебаний контролируемых компонентов рельсового транспортного средства, так что эта измененная характеристика колебаний используется в отношении возможных источников дефектов, чтобы реализовать экспертный диагноз рельсового транспортного средства. При этом постоянно контролируются параметры частоты, амплитуды и/или демпфирования собственных колебаний данных компонентов рельсового транспортного средства.
Другими словами согласно известному документу компоненты транспортного средства подвергаются своего рода модальному анализу и контролируются модальные параметры, такие как собственная частота и демпфирование для распознавания повреждений в рамках экспертного диагноза. Известный способ, однако, оценивает временные характеристики измерительных сигналов без дифференциации. В частности, сигналы, полученные при осуществлении способа при полностью различных краевых условиях, как, например, различные условия трения покоя или трения скольжения, оцениваются вместе. Вследствие этого показатели из преобразований Фурье, как, например, значения для собственных частот, а также их максимумов амплитуды имеют относительно большой разброс, который осложняет однозначную и надежную оценку частотной характеристики.
Недостаток известного способа заключается также в том, что спектр возбуждения рельсового транспортного средства при работе настолько различен, что в каждый отдельный момент времени не ясно, какую долю, вообще, имеют собственные колебания данного компонента транспортного средства в замеренном сигнале. В основе этого лежит соображение, что не каждое постороннее возбуждение компонента транспортного средства обязательно ведет к собственным колебаниям компонента транспортного средства соответственно к колебаниям в данной собственной частоте.
Не в последнюю очередь из стоимостных соображений возможно, чтобы каждому компоненту транспортного средства, составленному из нескольких компонентов транспортного средства узла, как, например, поворотной тележке с колесными парами и успокоителем качки придавался собственный датчик. Поэтому, если такой узел оборудуется только одним датчиком и известный экспертный контроль приходит к результату, что узел имеет отличающиеся показатели собственных колебаний, остается открытым, какой компонент транспортного средства (колеса колесной пары, успокоитель качки) узла имеет дефект.
В основе настоящего изобретения лежит задача дальнейшего развития способа и устройства упомянутого выше вида таким образом, чтобы сделать возможной надежную информацию о состоянии износа компонентов рельсового транспортного средства, которые оказывают большое влияние на стабильность движения, как, например, колеса колесной" пары и успокоители качки, которые применяются для демпфирования крутильных колебаний (гасителей колебаний) между поворотной тележкой и кузовом вагона. Кроме того с помощью предложенного в соответствии с изобретением способа должна иметься возможность идентификации компонентов ходового механизма, имеющих состояние недопустимого износа или находящегося в дефектном состоянии.
Поставленная задача решена посредством изобретений, охарактеризованных признаками пунктов 1 и 4 формулы изобретения.
Стабильность движения ходового механизма рельсового транспортного средства сильно зависит от его демпфирующих свойств, поэтому в общем прежде всего для высокоскоростных поездов необходимыми являются демпферы колебаний между поворотной тележкой и кузовом вагона. Общее демпфирование поворотной тележки определяется несколькими параметрами:
- демпфирование зависит от свойств колес, в частности конусности и профиля колес, который изменяется в зависимости от износа,
- демпфирование вращения между поворотной тележкой и кузовом вагона, которое охватывает демпфирование с помощью успокоителей качки или успокоителями качки,
- скорость рельсового транспортного средства.
Успокоители качки, как известно, гасят крутильные колебания поворотных тележек при колебаниях вокруг вертикальной оси. Как изменения демпфирующих свойств, так и изменения конусности колес имеют следовательно непосредственное воздействие на стабильность движения колес, в частности на проявление так называемого виляния поворотной тележки.
Виляние поворотной тележки вызывается посторонним возбуждение от рельсов. К этому постороннему возбуждению относятся:
- дефекты рельсов,
- проезд через стрелочные переводы,
- проезд закруглений,
- синусоидальный ход колесных пар.
Синусоидальный ход колесных пар кроме того позволяет оценить, имеет ли место уменьшение стабильности движения по причине возрастающей эквивалентной конусности соответственно изменения профиля колес колесных пар поворотной тележки или по причине уменьшенного демпфирования вращения поворотной тележки.
Синусоидальный ход представляет собой описание поведения при движении колесных пар рельсового транспортного средства с коническим профилем колеса (конусностью). Благодаря синусоидальному ходу на прямых и на закруглениях с большими радиусами осуществляется самоцентрирование колесной пары на железнодорожном перегоне, без необходимости вступления в действие гребня бандажа. Благодаря этому достигается лучшее поведение при движении и меньший износ, чем у колесных пар с цилиндрическим профилем колеса, которые не имеют какого-либо синусоидального хода.
Синусоидальный ход возникает потому, что в колесной паре с коническим профилем колеса, который является эксцентричным, радиусы колеса на обеих точках контакта с рельсами различны. Так как оба колеса колесной пары жестко соединены осью, колесо с большим радиусом в точке контакта движется вперед быстрее, чем колесо с меньшим радиусом. Отсюда находящаяся слишком далеко вправо колесная пара отклоняется влево, так как радиус колеса на правой точке контакта больше, чем на левой точке контакта. Соответственно находящаяся слишком далеко влево колесная пара отклоняется вправо. Вследствие этого происходит продольное движение колесной пары в форме синусоиды.
В виде модели синусоидальный ход может описываться с помощью формулы колокольчика, которая описывает частоту f хода этого волнообразного движения рельсового транспортного средства:
(1)
где: tan γ - эквивалентная конусность данного колеса.
Эквивалентная конусность дает приближенный наклон конуса для не чисто конусного профиля колеса, при котором чисто конусный профиль колеса с таким наклоном конуса имел бы подобное кинематическое поведение при движении.
r1, r2 - радиусы качения, м,
r0 - средний радиус качения, м, с ,
s - средний размер колеи (при нормальной колее 1500 мм),
f - частота синусоидального хода, Гц,
v - скорость, м/с.
Из уравнения (1) можно сделать вывод, что с возрастающей эквивалентной конусностью tan γ частота f синусоидального хода увеличивается, т.е., что транспортное средство нагружается более высокой частотой f возбуждения из синусоидального хода колесной пары. Критическая скорость, при которой транспортное средство еще движется стабильно, вследствие этого снижается. Поэтому при высоких скоростях движения, как это имеет место, например, у высокоскоростных поездов, геометрия контакта между колесом и рельсом должна находиться в подобного рода состоянии, чтобы была небольшая эквивалентная конусность. Другими словами для стабильного выхода из прямой рельсового транспортного средства частота f синусоидального хода колесных пар должна быть по возможности малой, что требует по возможности небольшую эквивалентную конусность tan γ.
Это является фоном рассуждений о том, что синусоидальный ход, возникающий благодаря взаимодействию колес с приближенно коническим профилем колеса с рельсами, при наличии определенных краевых условий имеет определенное изменение амплитуды и определенную частоту.
Если, например, частота, определенная с помощью преобразования Фурье из замеренного временного сигнала изменения поперечного ускорения, отклоняется на более чем заданное значение от значения частоты, ожидаемого для этих граничных условий, в этом случае она представляет признак существования недопустимого состояния износа в форме недопустимо высокой эквивалентной конусности tan γ.
Конусность tan γ опять же оказывает влияние на демпфирующие свойства ходового механизма. Размер конусности обеспечивает возможность распознать, имеет ли место при изменившемся показателе демпфирования износ успокоителя качки или уменьшенный показатель демпфирования имеет своим происхождением колесную пару.
Изменение амплитуды затухающего после возбуждения колебания позволяет судить о демпфирующих свойствах поворотной тележки, в частности, успокоителя качки. С помощью сравнения замеренного изменения поперечного ускорения с ожидаемым изменением соответственно полученных из этого показателей, возможно суждение о состоянии износа компонентов ходового механизма, как, например, успокоитель вращения и качки.
Отсюда, если обнаруживается изменение демпфирования, а также изменение конусности tan γ у колес, то могут быть составлены суждения будет ли в будущем пребывать рельсовое транспортное средство при эксплуатации в недопускаемом нестабильном состоянии или нет.
До сих пор в уровне техники контролируется максимальное значение поперечного ускорения поворотной тележки рельсового транспортного средства и при превышении заданного предельного значения подается предупредительный сигнал. Улучшение этого настраиваемого на событие метода заключается, однако в контроле состояния, при котором определяется демпфирование или показатели демпфирования поворотной тележки относительно поперечных движений, чтобы, в частности, подать своевременно сигнал в плане необходимого обслуживания, соответственно ремонта данной поворотной тележки.
Боковой импульс, например, при проезде стрелочного перевода ведет, как правило, к демпфированным колебаниям, по которым может определяться показатель демпфирования общей системы поворотной тележки.
При более высоких скоростях возбуждение проявляется через синусоидальный ход, показатель демпфирования в этом случае может определяться только с учетом конусности колес. Но конусность колес при износе изменяется не постоянно, она имеет тенденцию увеличиваться при увеличивающемся износе.
С помощью измеренной частоты синусоидального хода можно сделать заключение о конусности колес, а именно, не зависимо от амплитуды колебаний и демпфирования общей системы поворотной тележки. Благодаря этому с учетом скорости движения становится возможным определение показателя демпфирования успокоителей качки.
При небольшой скорости рельсового транспортного средства определение показателей демпфирования возможно без учета возбуждения синусоидального хода, так как влияние синусоидального хода в этом случае мало.
Описанные выше в общем зависимости могут быть в этом случае представлены следующим образом.
Ниже под общей системой поворотной тележки понимается поворотная тележка вместе с приданными колесными парами и успокоителями качки. Поведение при движении и стабильность ходового механизма (поворотной тележки) рельсового транспортного средства зависят от общего демпфирования Dg. Общее демпфирование Dg поворотной тележки складывается примерным образом из демпфирования Dschl успокоителей качки и демпфирования Drad колесных пар благодаря их конусности tan γ:
Демпфирование колесных пар Drad дальше является функцией скорости v и частоты f синусоидального хода:
При более низкой скорости демпфирование колесной пары Drad становится очень малым и им можно пренебречь. Таким образом, при более низкой скорости общее демпфирование Dg поворотной тележки примерно равно демпфированию успокоителя Dschl качки.
Отсюда, если при низких скоростях устанавливается изменение, в частности, уменьшение общего демпфирования Dg, то это изменение может сводиться к уменьшению демпфирования Dschl успокоителей или успокоителя качки поворотной тележки.
При более высоких скоростях воздействие конусности tan γ колес сильнее. Из общего демпфирования
нельзя сделать вывод о составных частях демпфирования, относящихся к успокоителям качки и конусности колесной пары.
Однако конусность tan γ колес является функцией частоты f синусоидального хода, которая наступает при определенной скорости v транспортного средства:
Тогда демпфирование колесных пар Drad является функцией конусности tan γ колес соответственно функцией частоты f синусоидального хода при скорости v транспортного средства:
Поэтому, если при более высоких скоростях транспортного средства v измеренная частота f синусоидального хода соответствует ожидаемому значению, что указывает на допустимый износ колес в отношении их конусности tan γ, тогда указывает изменение общего демпфирования Dg на изменение демпфирования успокоителя или успокоителя качки Dschl данной поворотной тележки.
Тогда, если имеются достаточно данных измерения, например, в форме универсальных характеристик, чтобы представить демпфирование колесных пар Drad (v, f) в зависимости от параметров скорости v и частоты f синусоидального хода, то возможно определение коэффициентов демпфирования успокоителя качки Dschl и коэффициентов демпфирования колесных пар Drad также при более высоких скоростях v.
С учетом представленных выше зависимостей согласно первому аспекту изобретение представляет способ контроля состояния поворотной тележки рельсового транспортного средства, имеющей, по меньшей мере, одну колесную пару, а также, по меньшей мере, один успокоитель качки, причем
- колеса колесной пары жестко соединены осью и имеют приближенно конический профиль колеса,
- из сигналов, полученных от датчиков, расположенных на поворотной тележке, выделяются сигналы, которые соответствуют синусоидальному ходу колесной пары поворотной тележки, базирующемуся на коническом профиле колеса колес, причем
- определяется частота синусоидального хода в отношении краевых условий как соответственно существующая скорость транспортного средства и сравнивается с хранящимся в памяти типичным значением или диапазоном значений для частоты синусоидального хода для существующих граничных условий, причем контролируется отклонение замеренной частоты от хранящегося в памяти значения или диапазона значений для этой частоты.
Если частота синусоидального хода, определенная, например, с помощью преобразования Фурье из замеренного и полученного временного сигнала поперечного ускорения, больше чем заданное значение частоты, ожидаемое в этих краевых условиях, тогда это представляет признак существования недопустимого состояния износа в форме недопустимо высокой эквивалентной конусности tan γ колес колесных пар поворотной тележки.
Особенно предпочтительно включают краевые условия, среди которых, прежде всего, определяются и заносятся в память характеристические заданные значения для частоты синусоидального хода, наряду со скоростью транспортного средства, по меньшей мере, один из следующих параметров: загрузку рельсового транспортного средства, непосредственно действующие тормозные или приводные силы, проезд по закруглению или прямой, состояние перегона проезжаемого в данный момент участка и подобное. В этом случае, например, универсальные характеристики хранятся в памяти с частотами синусоидального хода, характеристическими для соответствующих краевых условий и сравниваются с частотами для синусоидального хода, определенными при эксплуатации.
Согласно другому аспекту изобретения предложен способ для контроля состояния поворотной тележки рельсового транспортного средства, имеющей, по меньшей мере, одну колесную пару, а также, по меньшей мере, один успокоитель качки, причем
- колеса колесной пары жестко соединены осью и имеют приближенно конический профиль колеса,
- по сигналам, полученным от, по меньшей мере, одного расположенного на поворотной тележке датчика, определяется показатель демпфирования,
- определенный показатель демпфирования сравнивается с хранящимся в памяти типичным значением или диапазоном значений для показателя демпфирования, причем
- при превышающем на заданную величину отклонении определенного показателя демпфирования от хранящегося в памяти значения или диапазона значений для показателя демпфирования проверяется насколько велика скорость рельсового транспортного средства относительно задаваемой предельной скорости, и
- при скоростях рельсового транспортного средства, не достигающих заданной предельной скорости, подается сигнал при изменении в области успокоителя качки поворотной тележки или
- при скоростях рельсового транспортного средства, достигающих или превышающих предельную скорость, из сигналов, полученных от датчиков, расположенных на поворотной тележке, выделяются сигналы, которые соответствуют синусоидальному ходу колесной пары поворотной тележки, базирующемуся на коническом профиле колес, и с помощью хранящейся в памяти универсальной характеристики, описывающей зависимость показателя демпфирования колесной пары от скорости рельсового транспортного средства и частоты синусоидального хода, в зависимости от определенной частоты синусоидального хода и существующей скорости определяется показатель демпфирования колесной пары поворотной тележки, и
- определенный показатель демпфирования колесной пары поворотной тележки сравнивается с хранящимся в памяти значением или диапазоном значений показателя демпфирования колесной пары поворотной тележки, типичным для именно существующей скорости рельсового транспортного средства и именно данной частоты синусоидального хода, и
- при превышающем предварительно заданную величину отклонении определенного показателя демпфирования колесной пары поворотной тележки от хранящегося в памяти значения или диапазона значений для показателя демпфирования колесной пары поворотной тележки подается сигнал о существовании изменения в области колесной пары поворотной тележки, или
- при достигающем или не достигающем предварительно заданной величины отклонении определенного показателя демпфирования колесной пары поворотной тележки от хранящегося в памяти значения или диапазона значений для показателя демпфирования колесной пары поворотной тележки подается сигнал о существовании изменения в области успокоителя качки поворотной тележки.
Преимущественно сигналы, полученные от датчика, являются сигналами о поперечном ускорении, из которых с помощью фильтра выделяется диапазон частот от 3 до 9 Гц. Этот диапазон частот является типичным диапазоном частот, в котором возникает синусоидальный ход.
Следовательно, с помощью описанного выше способа могут однозначно идентифицироваться компоненты ходового механизма (колеса или успокоители качки), имеющие недопустимое состояние износа или дефектное состояние.
В ответ на сигнал либо автоматически либо машинистом моторного вагона могут проводиться ответные меры, которые могут состоять в скором осуществлении обслуживания данной колесной пары или успокоителя качки поворотной тележки или в экстремальном случае в немедленном торможении рельсового транспортного средства или состава рельсовых транспортных средств. Возможна также передача данных сигнала обслуживающей станции.
Предложенные в соответствие с изобретением способы могут реализоваться благоприятно в плане стоимости с помощью датчиков для контроля движения поворотной тележки, а также с помощью устройства для обработки сигналов этого датчика.
С помощью мероприятий, изложенных в зависимых пунктах формулы изобретения, возможны усовершенствования и улучшения изобретения, приведенные в зависимых пунктах формулы изобретения.
Сигнал может передаваться машинисту моторного вагона состава рельсовых транспортных средств оптически и/или акустически, например, в форме проблесковой сигнальной лампы или с помощью предупредительного звукового сигнала, чтобы провести эти ответные мероприятия. В частности, сигнал представляет собой предупредительный сигнал о предстоящем обслуживании данной колесной пары поворотной тележки, при котором эта колесная пара должна обрабатываться так, чтобы эквивалентная конусность получила снова допустимую соответственно не критическую величину и была осуществлена проверка, соответственно замена успокоителей качки.
Изобретение поясняется чертежами, на которых представлено следующее:
фиг.1 - вид в перспективе рельсового транспортного средства с двумя поворотными тележками, имеющими соответственно две колесные пары и два успокоителя качки;
фиг.2 - диаграмма, которая изображает сигнал для поперечных движений поворотной тележки во времени;
фиг.3 - устройство для контроля состояния поворотной тележки согласно предпочтительному варианту выполнения изобретения;
фиг.4 - диаграмма, которая изображает сигнал ускорения во времени для определения показателя демпфирования;
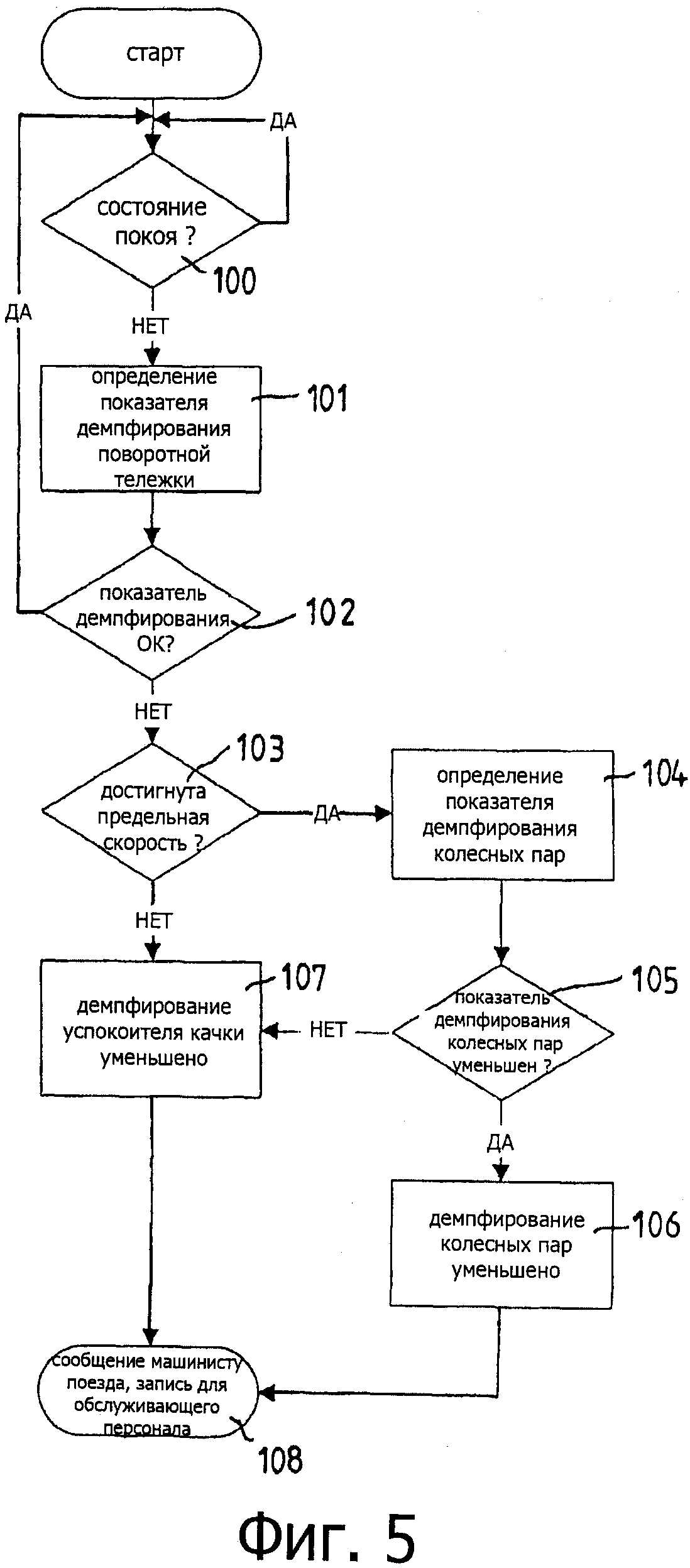
фиг.5 - блок-схема предпочтительного варианта выполнения способа согласно изобретению.
На фиг.1 показано рельсовое транспортное средство состава рельсовых транспортных средств, которое имеет, например, две поворотные тележки 3 с соответственно двумя колесными парами 4 и два успокоителя 5 качки. При этом колесные пары 4 катятся по параллельным рельсам 2 и состоят из оси 6 и двух жестко закрепленных на ней колес 8. Колеса 8 колесных пар 4 имеют соответственно приближенно конический профиль колеса, т.е. диаметр колеса на поверхности качения уменьшается известным образом в смотрящем от ребра бандажа направлении. Благодаря этому во время качения колесной пары 4 по рельсам 2 возникает однажды описанный синусоидальный ход, т.е. периодические колебания относительно рельсов 2 и кузова 1 вагона рельсового транспортного средства.
Допустим на обеих поворотных тележках 3 закреплен соответственно один датчик 10 для восприятия колебаний поворотных тележек 3, возникающих поперек направления движения. Предпочтительно применяются датчики 10 ускорения, которые регистрируют поперечное ускорение поворотной тележки 3. Но возможно они являются датчиками перемещения соответственно скорости. От датчиков 10 сигналы поперечного ускорения управляются выводом, схематически показанным на фиг.3, имеющим своей основой микропроцессор обрабатывающего устройства 12. Из сигналов, полученных от датчиков 10, например, с помощью фильтра, выделяется диапазон частот от 3 до 9 Гц. Этот диапазон частот является типичным диапазоном частот, в котором возникает синусоидальный ход.
Соответствующие характеризирующие синусоидальный ход рельсового транспортного средства сигналы В датчиков 10 во времени t представлены на фиг.2. Как можно видеть на фиг.2, сигналы, представляющие синусоидальный ход поворотной тележки, периодически имеют форму синусоиды и в основном не демпфированы, так как колесные пары 4 подвергаются постоянному постороннему возбуждению благодаря синусоидальному ходу. Поэтому амплитуды колебаний при постоянной скорости v примерно равны по величине.
Частота f синусоидального хода зависит от краевых условий как, среди прочего, от мгновенной скорости движения v рельсового транспортного средства, соответственно от скорости вращения колес 8. Особенно предпочтительно включают краевые условия, которые оказывают влияние на частоту f синусоидального хода наряду со скоростью v движения, по меньшей мере, один из следующих параметров: загрузку рельсового транспортного средства, непосредственно действующие тормозные или приводные силы, проезд по закруглению или прямому пути, состояние перегона непосредственно проезжаемого участка и подобное. При этом для каждого граничного условия, в частности, для каждой скорости v в зависимости от факторов, как геометрия контакта колесо-рельс (эквивалентная конусность), характеристическая частота f, соответственно характеристический диапазон частот для частоты f синусоидального хода, который, например, может, прежде всего, определяться опытным путем и в качестве заданного значения запоминаться в универсальных характеристиках устройства для обработки.
Устройство 12 для обработки согласно фиг.3 имеет преимущественно фильтр 14, блок 16 для подготовки сигналов, а также сравнивающее устройство 18. Через датчик 20 скорости устройство 12 для обработки получает кроме того сигнал о мгновенной скорости v транспортного средства. Частота f (v) мгновенных колебаний поворотной тележки 3 в форме синусоидального хода, зависящая от замеренной скорости v транспортного средства, определяется преимущественно с помощью быстрого преобразования Фурье (FFT) временных сигналов датчика 10 ускорения (фиг.2) внутри блока 16 подготовки сигналов.
В сравнивающем устройстве 18 устройства 12 для обработки преимущественно сохранены универсальные характеристики, которые представляют зависимость частоты f синусоидального хода от краевых условий или условий эксплуатации рельсового транспортного средства как, например, моментальная скорость v движения рельсового транспортного средства соответственно от скорости вращения колес 8. Эти универсальные характеристики с характеристическими частотами f для синусоидального хода, прежде всего, определяются, например, опытным путем.
Основывающаяся на замеренных временных сигналах В, полученная от блока 16 для подготовки сигналов частота f (v) периодических колебаний в отношении к соответственно существующей скорости v транспортного средства или скорости вращения колеса затем сравнивается с хранящимся в памяти значением или диапазоном значений для частоты f(v) синусоидального хода, типичным для существующих граничных условий как именно существующая скорость v транспортного средства, и контролируется отклонение замеренной частоты f(v) от хранящегося в памяти значения (v) или от хранящегося в памяти диапазона значений.
При отклонении замеренной частоты f(v) от хранящегося в памяти значения f(v) или от хранящегося в памяти диапазона значений на заданную величину предпочтительно подается сигнал S о существовании недопустимого состояния износа колесных пар 4. Точнее, при таком сигнале S следует исходить из того, что конусность колесных пар 4 данной поворотной тележки в отношении стабильности движения поворотной тележки приобретает критические значения. Так как, например, на каждой поворотной тележке 3 имеется датчик 10, сигнал может предназначаться соответствующей поворотной тележке 3 соответственно ее колесным парам 4.
Этот сигнал S может передаваться машинисту моторного вагона состава рельсовых транспортных средств или обслуживающему персоналу оптическим или акустическим путем, например, в форме сигнальной лампы или сигнальных сирен, чтобы могли проводиться ответные мероприятия, в частности, сигнал S является предупредительным сигналом о предстоящем обслуживании колесных пар 4 данной поворотной тележки 3, и может также записываться в запоминающем устройстве устройства для обработки для обслуживающего персонала. Ответные мероприятия в этом случае могут состоять в том, что колесные пары 4 данной поворотной тележки 3 должны исправляться так, что геометрия колесо-рельс, в частности, эквивалентная конусность будет иметь допустимое соответственно некритическое значение и благодаря этому будут созданы свойства демпфирования колесных пар 4 в рамках синусоидального хода, которые препятствуют критическому проявлению синусоидального хода, в частности, при высоких скоростях v.
На фиг.5 изображена блок-схема другого варианта выполнения способа. Этот способ точно также осуществляется с помощью показанного на фиг.3 устройства 12 обработки.
После старта программы с помощью запроса на этапе 100 проверяется, находится ли рельсовое транспортное средство в состоянии покоя или нет. В случае наличия состояния покоя программа возвращается назад к старту. Напротив, если рельсовое транспортное средство находится в движении, из сигналов, полученных от датчика 10, расположенного на поворотной тележке, в рамках этапа 101 определяется общий показатель демпфирования или общий коэффициент демпфирования Dg поворотной тележки 3.
При этом согласно фиг.4 предпочтительно привлекаются сигналы а, полученные от датчика 10. При допущении, что поворотная тележка 3 к моменту времени t1, вследствие отдельного события, т.е. вследствие однократного ударного импульса, как, например, пересечения стрелки возбудится с появлением поперечных колебаний, получится показанная на фиг.4 типичная демпфированная и поэтому затухающая форма колебаний, причем общему демпфированию Dg поворотной тележки 3 этого поперечного колебания способствуют, во-первых, коэффициент демпфирования Drad колесных пар 4, имеющий своим происхождением геометрию колесо/рельс, в частности, конусность колес 8, а также коэффициент демпфирования Dschl успокоителя качки 5.
Изменение амплитуды колебаний с момента времени t1 импульса до момента времени t2, в котором амплитуда колебаний снова приближенно постоянна, является затухающим, т.е. значение максимума амплитуды колебаний со временем снижается. Такое поведение может характеризоваться с помощью огибающей или касательной к максимумам амплитуды колебаний во временном диапазоне между t1 и t2. По повышению этой касательной в этом случае может определяться общий коэффициент демпфирования Dg.
В рамках этапа 102 определенный общий коэффициент демпфирования Dg поворотной тележки 3 сравнивается с хранящимся в памяти типичным значением или диапазоном значений для общего коэффициента демпфирования Dg поворотной тележки 3.
Если при этом отклонение определенного общего коэффициента демпфирования Dg поворотной тележки 3 от хранящегося в памяти значения или диапазона значений для общего коэффициента демпфирования Dg поворотной тележки 3 не превышает заданную величину (показатель демпфирования ОК), то следует исходить из достаточного демпфирования поворотной тележки 3 и программа снова возвращается к старту.
Напротив, если существует превышающее заданную величину отклонение определенного общего коэффициента демпфирования Dg поворотной тележки 3 от хранящегося в памяти значения или диапазона значений для общего коэффициента демпфирования Dg поворотной тележки (показатель демпфирования не ОК), то в рамках этапа 103 проверяется, как велика скорость рельсового транспортного средства относительно заданной предельной скорости. Термин «предельная скорость» здесь означает скорость, начиная с которой на общее демпфирование Dg имеется влияние колесных пар 4 поворотной тележки 3, которое не подлежит пренебрежению. Эта предельная скорость определяется предпочтительно, прежде всего, опытным путем.
Как однажды пояснялось, при низких скоростях можно пренебрегать воздействием контакта колесо/рельс на поведение при демпфировании и свойства демпфирования поворотной тележки 3 решающим образом определяются успокоителем 5 качки поворотной тележки 3. При скоростях рельсового транспортного средства, не достигающих заданной предельной скорости, и при установленном в рамках предыдущего этапа 102 недостаточном общем демпфировании Dg устройством 12 для обработки в дальнейшем подается сигнал S об изменении коэффициента демпфирования Dschl успокоителя 5 качки поворотной тележки 3. Обозначение и проявление этого сигнала при этом разнообразно. Решающим является только то, что он указывает на изменение в области успокоителя 5 качки данной поворотной тележки 3.
При скоростях рельсового транспортного средства, достигающих или превышающих предельную скорость, однако, наряду с коэффициентом демпфирования Dg успокоителя 5 качки определяющим также является коэффициент демпфирования Drad колесных пар 4.
При высоких скоростях из сигналов, полученных от датчика 10, установленного на поворотной тележке 3, с помощью фильтра 14 устройства для обработки выделяются сигналы, которые соответствуют синусоидальному ходу колесных пар 4 поворотной тележки, базирующемуся на коническом профиле колеса колес 8.
Эти сигналы фильтруются и с помощью преобразования Фурье преобразуются в диапазон частот. Результатом является в этом случае именно существующая частота синусоидального хода f рельсового транспортного средства и данной поворотной тележки 3 при именно существующей скорости v. В запоминающем устройстве сравнивающего устройства 18 устройства 12 для обработки записаны зависимость коэффициента демпфирования Drad колесных пар 4 от скорости v рельсового транспортного средства и универсальных характеристик, описывающих частоту f синусоидального хода. Потом на этапе 104 с помощью этих универсальных характеристик может определяться крайне важный показатель демпфирования Drad колесных пар поворотной тележки 3 в зависимости от ранее определенной существующей частоты f синусоидального хода и существующей скорости v.
Потом в рамках этапа 105 определенный показатель демпфирования Drad колесной пары 4 поворотной тележки 3 сравнивается с хранящимся в памяти значением или диапазоном значений для показателя демпфирования Drad колесной пары 4 поворотной тележки 3, типичным для именно существующей скорости v рельсового транспортного средства и именно существующей частоты f синусоидального хода.
Если это сравнение дает, что коэффициент демпфирования Drad колесной пары 4 поворотной тележки 3, определенный в рамках этапа 104, отличается от хранящегося в памяти значения или диапазона значений для коэффициента демпфирования Drad колесной пары 4 поворотной тележки 3 больше, чем на заданную величину, то подается сигнал 106 о существовании изменения в области колесных пар 4 данной поворотной тележки 3. Этот сигнал должен в этом случае указывать на возможное уменьшение коэффициента демпфирования Drad колесных пар 4 поворотной тележки 3.
Однако если сравнение 105 показало, что определенный в рамках этапа 104 коэффициент демпфирования Drad колесных пар поворотной тележки 3 отличается от хранящегося в памяти значений или диапазона значений для коэффициента демпфирования Drad колесных пар 4 поворотной тележки 4 меньше, чем на заданную величину, то подается сигнал 107 о существовании изменения в области успокоителя 5 качки поворотной тележки 3. В этом случае этот сигнал должен указывать на возможное уменьшение коэффициента демпфирования Dschl успокоителя 5 качки поворотной тележки 3.
Сигналы 106 или 107 могут передаваться машинисту моторного вагона состава рельсовых транспортных средств на этапе 108 оптическим и/или акустическим путем, например, в форме проблесковой сигнальной лампы или с помощью звуковой сирены, чтобы он проводил ответные мероприятия. В частности сигналы 106 или 107 представляют собой предупредительные сигналы о предстоящем, также внеочередном обслуживании колесных пар или успокоителя качки данной поворотной тележки 3. В качестве альтернативы может также автоматически снижаться скорость рельсового транспортного средства или состава рельсовых транспортных средств.
Реферат
Изобретение относится к способу контроля состояния поворотной тележки (3) рельсового транспортного средства, имеющей, по меньшей мере, одну колесную пару (4). Причем колеса (8) колесной пары (4) жестко соединены осью (6) и имеют приближенно конический профиль колеса. На поворотных тележках (3) располагают датчики (10). Из сигналов, поданных датчиками (10), выделяются сигналы, которые соответствуют синусоидальному ходу колесной пары (4) поворотной тележки (3), базирующемуся на коническом профиле колеса колес (8). Изобретение предусматривает, что определяется частота (f) синусоидального хода в отношении к краевым условиям как соответственно существующая скорость (v) движения транспортного средства и сравнивается с хранящимся в памяти значением или диапазоном значений для частоты (f) синусоидального хода, типичным для имеющихся краевых условий, причем контролируется отклонение измеренной частоты (f) от хранящегося в памяти значения или диапазона значений для этой частоты (f). Изобретение относится к устройству для осуществления указанного способа. В результате повышается точность и качество контроля состояния поворотной тележки. 3 н. и 11 з.п. ф-лы, 5 ил.
Формула
а) колеса (8) колесной пары (4) жестко соединены осью (6) и имеют, в основном, конический профиль,
б) из полученных от расположенных на поворотной тележке датчиков (10) сигналов выделяют сигналы, которые соответствуют синусоидальному ходу колесной пары (4) поворотной тележки (3), базирующемуся на коническом профиле колес (8), отличающийся тем, что
в) определяют частоту (f) синусоидального хода в отношении краевых условий как соответственно существующую скорость (v) транспортного средства и сравнивают с хранящимся в памяти типичным для существующих краевых условий значением или диапазоном значений для частоты (f) синусоидального хода, причем контролируют отклонение замеренной частоты (f) от хранящегося в памяти значения или диапазона значений для этой частоты (f).
а) колеса (8) колесной пары (4) жестко соединены осью (6) и имеют, в основном, конический профиль,
б) по сигналам, полученным от датчиков (10), расположенных на поворотной тележке, определяют показатель демпфирования,
в) определенный показатель демпфирования сравнивают с хранящимся в памяти типичным значением или диапазоном значений для показателя демпфирования, отличающийся тем, что
г) при отклонении определенного показателя демпфирования, превышающем заранее заданную величину, от хранящегося в памяти значения или диапазона значений для показателя демпфирования проверяют величину скорости рельсового транспортного средства относительно заданной предельной скорости, и
д) при скоростях рельсового транспортного средства, не достигающих заданную предельную скорость, подают сигнал (S) о существовании изменения в области успокоителя (5) качки поворотной тележки (3) или
е) при скоростях рельсового транспортного средства, достигающих или превышающих предельную скорость, из сигналов, полученных от датчиков (10), расположенных на поворотной тележке (3), выделяют сигналы, которые соответствуют синусоидальному ходу колесной пары (4) поворотной тележки, базирующемуся на коническом профиле колес (8), и с помощью, по меньшей мере, одной хранящейся в памяти универсальной характеристики, описывающей зависимость показателя демпфирования колесной пары от скорости (v) рельсового транспортного средства и частоты (f) синусоидального хода, определяют показатель демпфирования колесной пары (4) поворотной тележки в зависимости от определенной частоты (f) синусоидального хода и существующей скорости (v), и
ж) определенный показатель демпфирования колесной пары (4) поворотной тележки сравнивают с хранящимся в памяти значением или диапазоном значений для показателя демпфирования колесной пары (4) поворотной тележки (3), типичным для существующей скорости (v) рельсового транспортного средства и существующей частоты (f) синусоидального хода, и
з1) при отклонении определенного показателя демпфирования колесной пары (4) поворотной тележки (3), превышающем заранее заданную величину, от хранящегося в памяти значения или диапазона значений для показателя демпфирования колесной пары (4) поворотной тележки (3) подают сигнал о наличии изменения в области колесной пары (4) поворотной тележки (3), или
з2) при отклонении определенного показателя демпфирования колесной пары (4) поворотной тележки (3), достигающем или не достигающем заранее заданную величину, от хранящегося в памяти значения или диапазона значений для показателя демпфирования колесной пары (4) поворотной тележки (3) подают сигнал (S) о существовании изменения в области успокоителя (5) качки поворотной тележки (3).
Комментарии