Усовершенствованная якорная лапа для сейсмического каротажного зонда - RU2382198C2
Код документа: RU2382198C2
Чертежи









Описание
Предшествующий уровень техники
Применение сейсмических челночных каротажных зондов при осуществлении съемок вертикального сейсмического профиля (ВСП) стволов скважин для оценки окружающих подземных пластов хорошо известно. Пример многочелночной группы 100 сейсмических приборов изображен на фиг.1. Многочелночная группа 100 сейсмических приборов может содержать несколько сейсмических каротажных зондов, связанных друг с другом посредством кабеля и транспортируемых по стволу скважины, а сейсмические сигналы при этом генерируются на поверхности. Каротажный кабель 102 (диапазон длины которого может составлять, например, от 4 до 46 км) соединен с каротажной головкой 104, которая может включать в себя электрически управляемое высвобождающее устройство (ЭУВУ) и гильзу 106 универсального формирователя сейсмических изображений (УФСИ). Многочелночная группа сейсмических приборов может также включать в себя соединительный кабель 108 УФСИ и множество сейсмических каротажных челноков 112, которые могут функционировать как сейсмоприемники. На каждом уровне измерений каждый челнок крепится посредством якорной лапы к стенке ствола скважины во время операции измерения. Методы съемки ВСП в типичном случае требуют проведения многочисленных измерений на разных уровнях или глубинах в стволе скважины. В результате, механизмы якорного крепления зондов приходится разъединять, чтобы обеспечить перестановку зондов. После перестановки зондов на следующий уровень измерения механизмы якорного крепления затем приходится повторно переводить в крепящее состояние перед проведением новых изменений.
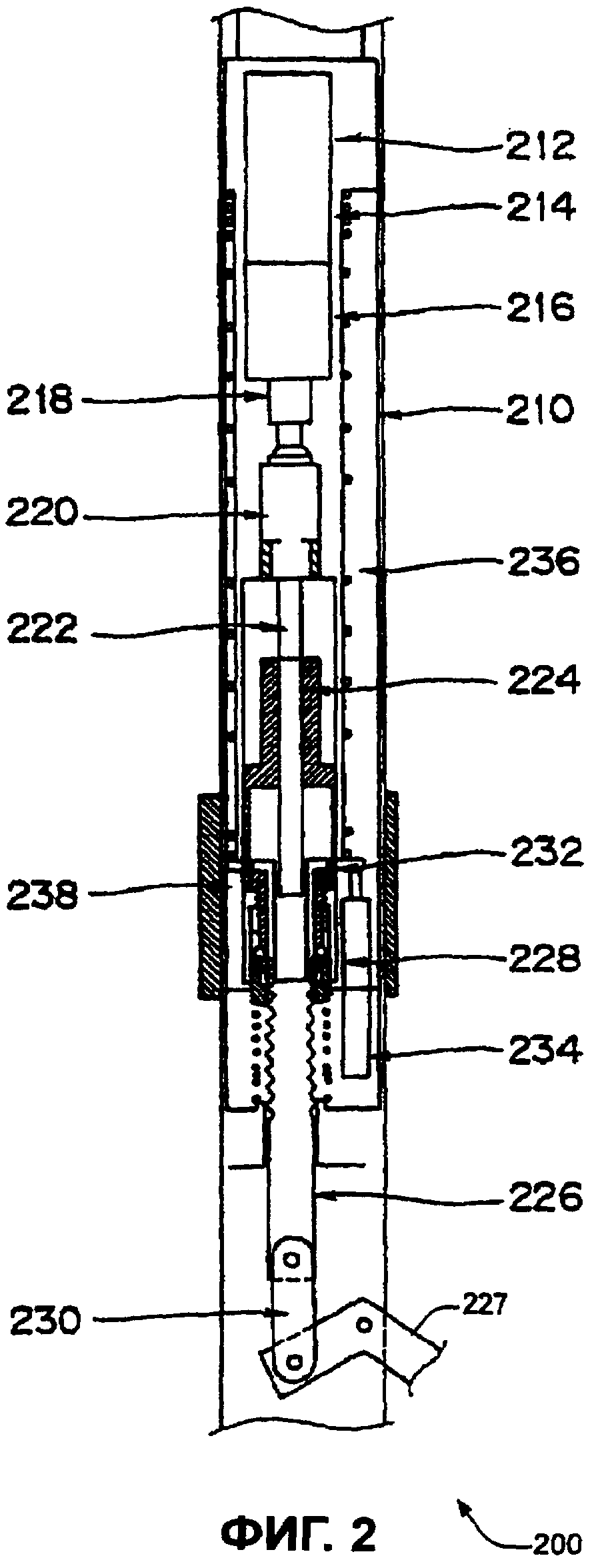
На фиг.2 показано подробное изображение обычного механизма 200 якорного крепления. Этот механизм включает в себя тормоз 212 на основе постоянного магнита (или электромагнита), электродвигатель 214 и укорачивающую подвеску 216, расположенную в корпусе 210 челнока. Привод на выходе укорачивающей подвески 216 соединен посредством соединительной муфты 218 и подшипника 220 с шариковым ходовым винтом 222. Шариковый ходовой винт 222 приводит в движение гайку 224. Конец винта 222 выступает в полый конец нажимной штанги 226, а конец гайки 224 контактирует с внешней поверхностью нажимной штанги 226 посредством механизма 228 сцепления, который подробнее описан ниже. Конец нажимной штанги 226 соединен со звеном 230, посредством которого он приводит в движение якорную лапу 227, показанную частично.
Внутренний конец нажимной штанги 226 заделан в основание 232, которое установлено внутри гайки 224. Основание 232 также имеет продолжения снаружи гайки 224, обеспечивающие соединение с потенциометром (или линейным регулируемым дифференциальным трансформатором, ЛРДТ) 234, который работает в качестве датчика положения нажимной штанги 226, и поэтому может быть использован в качестве скважинного датчика при измерении в стволе скважины с использованием якорной лапы. Вокруг механизма электродвигателя и шарикового ходового винта в корпусе челнока размещена пружина 236 сжатия, которая воздействует на основание 232, оказывая вдоль нормали направленный наружу нажим на нажимную штангу 226, а значит - и на упомянутую лапу. Выдвижение нажимной штанги 226 под воздействием пружины 236 ограничивается положением гайки 224 на винте 222, так что работа электродвигателя 214 по перемещению гайки 224 заставляет нажимную штангу 226 выдвигаться наружу под воздействием пружины 236 или отводиться внутрь под воздействием гайки 224.
Выдвижение нажимной штанги 226 под воздействием пружины 236 ограничивается лапой при ее контакте со стенкой ствола скважины или основанием 232 при его достижении, в случае полного выдвижения, упоров 238, расположенных в корпусе. После контактирования лапы со стенкой ствола скважины гайка 224 перемещается по нажимной штанге 226, активируя сцепление 228, так что винт 222 и гайка 224 осуществляют непосредственный привод нажимной штанги 226 и принудительно подводят ее к стенке ствола скважины, чтобы заякорить челнок. Для опускания лапы осуществляют реверс электродвигателя, и винт 222 отводит гайку 224, отпуская сцепление 228. После этого лапа удерживается у стенки ствола скважины лишь пружиной 236 и, следовательно, может отводиться или выдвигаться по мере волочения челнока в другое положение в скважине. Полный отвод челнока не требуется. Для полного отведения лапы привод реверса двигателя продолжает работать, а гайка 224 отводится вдоль винта 222 до тех пор, пока не вступит в контакт с основанием 232 нажимной штанги 226, которая затем втягивается обратно под действием пружины 236, отводящей нажимную штангу, а значит - и якорную лапу. При полном отведении лапы электродвигатель останавливается, и это обнаруживается по полностью отведенному или закрытому положению лапы. Выходной сигнал из потенциометра 234 также можно использовать для обнаружения полностью отведенного положения лапы. Подробное описание обычных механизмов якорного крепления, таких, как изображенный на фиг.2, приводится в патенте США №6315075 (Nakajima), включенном в данное описание посредством ссылки.
За последние годы размер групп скважинных сейсмических приборов возрос более чем до 40 челноков (а их стоимость превысила 1000000 долларов США). В результате, становится насущной проблема потерь приборов (например, многочелночных групп сейсмических инструментов) в стволе скважины. Важнее то, что потеря потенциально важной секции скважины или рабочего времени бурового станка может еще больше усугубиться, если операция по извлечению группы сейсмических приборов (обычно называемая «ловильной операцией») окажется неэффективной.
Например, при одном нежелательном сценарии многочелночная группа сейсмических приборов может застрять в стволе скважины из-за сбоя при отводе якорных лап сейсмических челноков. Для устранения данных проблем при таких сценариях в звене якорной лапы обычно предусматривают механически слабое место, предназначенное для обеспечения разрыва под воздействием некоторой силы тяги. Разрыв звена якорной лапы обеспечивает перемещение лапы на несколько дюймов, что позволяет высвободить челнок. Однако эта завершающая процедура принудительного высвобождения может оказаться безуспешной в обсаженных скважинах, где недостаток трения не обеспечивает достаточную силу, передаваемую к слабым местам якорных лап.
Поэтому существует постоянная потребность в усовершенствованных конструкциях многочелночных групп сейсмических приборов, позволяющих обеспечить расширенные возможности, уточненные рабочие параметры и повышенную надежность каротажа сейсмическими приборами.
Краткое изложение сущности изобретения
Различные аспекты настоящего изобретения имеют целью разработку якорной лапы для использования со скважинным сейсмическим зондом для сбора данных, включающим в себя корпус зонда. Якорная лапа включает в себя первый конец, выполненный с возможностью контакта с поверхностью стенки ствола скважины. Первый конец включает в себя наконечную часть, которая имеет паз. Якорная лапа также включает в себя подвижный кулачок, вставленный в паз и прикрепленный с возможностью снятия к первому концу посредством первого соединительного пальца, вставленного через отверстие в кулачке. В соответствии, по меньшей мере, с одним воплощением кулачок выполнен с возможностью, по меньшей мере, частичного поворота вокруг первого соединительного пальца. В одном варианте осуществления, кулачок выполнен с возможностью поворота в процессе, по существу, эллиптического движения вокруг первого соединительного пальца. Таким образом, радиус кулачка может увеличиваться при его повороте вокруг первого соединительного пальца. Кроме того, в соответствии с другим одним воплощением при контакте кулачка с поверхностью стенки ствола скважины поворот кулачка у поверхности стенки ствола скважины может вызывать перемещение первого конца якорной лапы от поверхности стенки ствола скважины, тем самым вызывая приложение силы к первому концу якорной лапы.
Альтернативный вариант осуществления настоящего изобретения имеет целью разработку скважинного сейсмического зонда для сбора данных. Зонд включает в себя корпус зонда, имеющий, по меньшей мере, один модуль датчика, якорную лапу и звено якорной лапы, выполненное с возможностью соединения якорной лапы с корпусом зонда. Звено якорной лапы включает в себя механизм с пониженной прочностью, выполненный с возможностью разрыва в ответ на воздействие разрывающей силы, имеющей минимальную пороговую величину, прикладываемой к механизму с пониженной прочностью. Якорная лапа включает в себя первый конец и второй конец, причем второй конец шарнирно прикреплен к звену якорной лапы, а первый конец выполнен с возможностью контакта с поверхностью стенки ствола скважины. В соответствии с одним воплощением первый конец включает в себя наконечную часть, имеющую паз. Якорная лапа также включает в себя подвижный кулачок, вставленный в паз и прикрепленный с возможностью снятия к первому концу посредством первого соединительного пальца, вставленного через отверстие в кулачке. В соответствии с другим воплощением кулачок выполнен с возможностью, по меньшей мере, частичного поворота вокруг первого соединительного пальца. В одном варианте осуществления кулачок выполнен с возможностью поворота в процессе, по существу, эллиптического движения вокруг первого соединительного пальца. Таким образом, радиус кулачка может увеличиваться, когда кулачок поворачивается вокруг первого соединительного пальца. Кроме того, в соответствии с вариантом осуществления при контакте кулачка с поверхностью стенки ствола скважины поворот кулачка у поверхности стенки ствола скважины может вызывать перемещение первого конца якорной лапы от поверхности стенки ствола скважины, тем самым вызывая приложение силы к механизму с пониженной прочностью. В одном варианте осуществления сила, прикладываемая к механизму с пониженной прочностью, может быть, по меньшей мере, равна упомянутой минимальной пороговой величине разрывающей силы.
Другой аспект настоящего изобретения имеет целью разработку способа высвобождения скважинного сейсмического зонда для сбора данных из положения, в котором он застрял внутри ствола скважины. Скважинный сейсмический зонд для сбора данных включает в себя корпус зонда, имеющий, по меньшей мере, один модуль датчика. Скважинный сейсмический зонд для сбора данных дополнительно включает в себя якорную лапу и звено якорной лапы, выполненное с возможностью соединения якорной лапы с корпусом зонда. Звено якорной лапы включает в себя механизм с пониженной прочностью, выполненный с возможностью разрыва в ответ на воздействие разрывающей силы, имеющей минимальную пороговую величину, прикладываемую к механизму с пониженной прочностью. Якорная лапа включает в себя первый конец и второй конец, причем второй конец шарнирно прикреплен к звену якорной лапы. Первый конец якорной лапы включает в себя наконечную часть, имеющую паз. Якорная лапа также включает в себя подвижный кулачок, вставленный в паз и прикрепленный с возможностью снятия к первому концу посредством первого соединительного пальца, вставленного через отверстие в кулачке. В соответствии с воплощением кулачок выполнен с возможностью, по меньшей мере, частичного поворота вокруг первого соединительного пальца. Открытая часть кулачка находится в контакте с поверхностью стенки ствола скважины. Когда обнаруживается отказ отвода якорной лапы, в ответ на это может быть вызван поворот кулачка у поверхности стенки ствола скважины. Поворот кулачка по поверхности стенки ствола скважины вызывает приложение силы к механизму с пониженной прочностью, что - в свою очередь - вызывает разрыв механизма с пониженной прочностью. Разрыв механизма с пониженной прочностью приводит к высвобождению скважинного сейсмического зонда для сбора данных из положения, в котором он застрял. В соответствии с конкретным вариантом осуществления поворот кулачка у поверхности стенки ствола скважины может быть вызван силой тяги, прикладываемой к верхней части скважинного сейсмического зонда для сбора данных.
Дополнительные задачи, признаки и преимущества настоящего изобретения станут очевидными из нижеследующего описания предпочтительных вариантов его осуществления, которое будет приведено со ссылками на прилагаемые чертежи.
Краткое описание чертежей
Фиг.1 изображает вариант многочелночной группы 100 сейсмических приборов.
Фиг.2 - подробное изображение обычного механизма 200 якорного крепления.
Фиг.3 изображает часть челнока 300 универсального формирователя сейсмических изображений (УФСИ), который можно использовать для воплощения различных аспектов настоящего изобретения.
Фиг.4А-С изображают вариант выполнения механизма с пониженной прочностью якорной лапы в челноке УФСИ.
Фиг.5А-F изображают разные виды модифицированной якорной лапы в соответствии с конкретным вариантом осуществления настоящего изобретения.
Фиг.6А изображает перспективный вид механизма с пониженной прочностью звена якорной лапы согласно фиг.4 В.
Фиг.6В-С изображают перспективные виды разных вариантов осуществления механизма с пониженной прочностью звена якорной лапы согласно настоящему изобретению.
Фиг.7 изображает различные конструктивные особенности конструкции кулачка в соответствии с конкретным вариантом осуществления настоящего изобретения.
Подробное описание предпочтительных вариантов осуществления
В настоящем изобретении описаны разные способы, которые можно использовать для усовершенствования конструкций многочелночных групп сейсмических приборов с целью обеспечения расширенных возможностей, уточненных рабочих параметров и повышенной надежности каротажа сейсмическими приборами. Один аспект настоящего изобретения имеет целью разработку усовершенствованной якорной лапы, например, для такого скважинного сейсмического зонда, как челнок УФСИ.
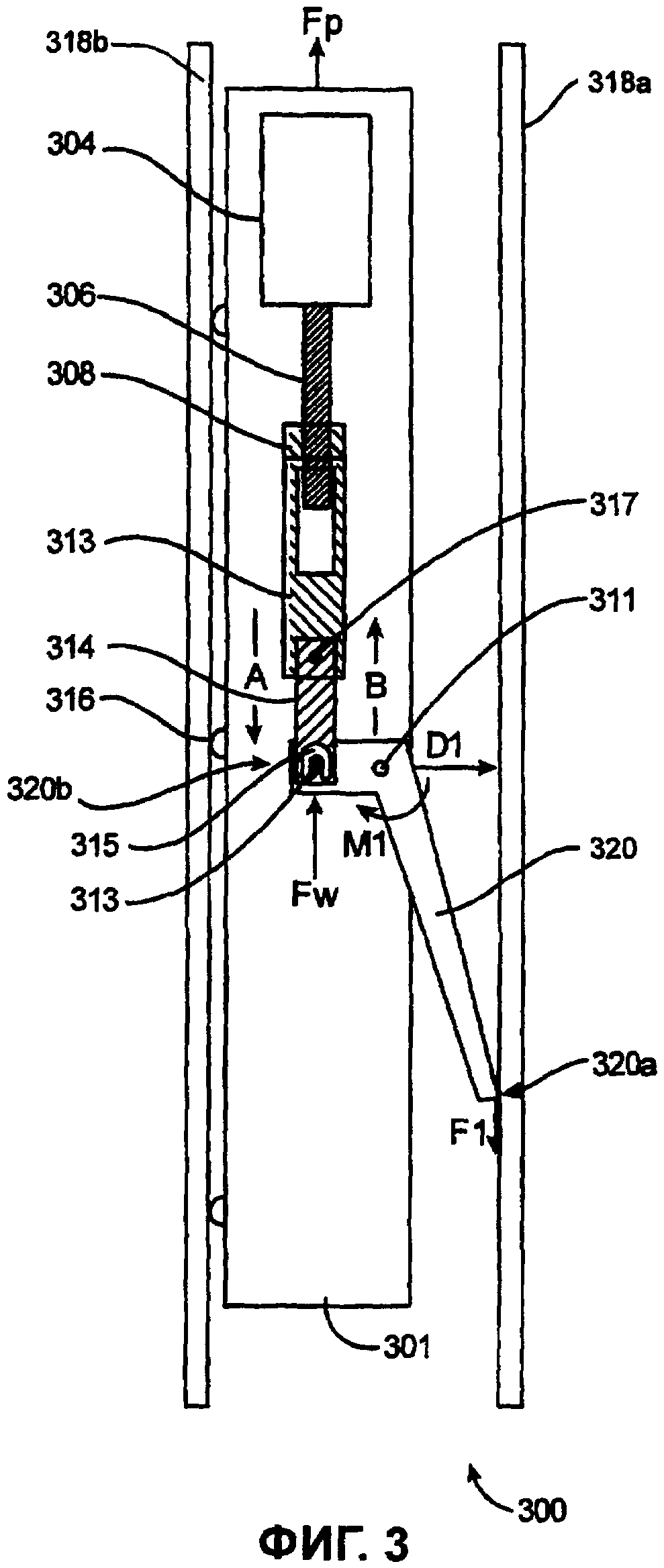
На фиг.3 показана часть челнока 300 универсального формирователя сейсмических изображений (УФСИ), который можно использовать для воплощения различных аспектов настоящего изобретения. Часть 300 челнока УФСИ показана заякоренной на часть (318а, 318b) стенки ствола скважины с использованием якорной лапы 330. В соответствии с одним вариантом осуществления часть 300 челнока УФСИ может быть аналогична по конструкции челноку 200 УФСИ, показанному на фиг.2. Механизм якорного крепления для части 300 челнока включает в себя редукторный электродвигатель 304, шариковый ходовой винт 306, шариковую гайку 308, нажимную тягу 313, звено 314 якорной лапы, шарнирную якорную лапу 320, опорные части 316 и т.д.
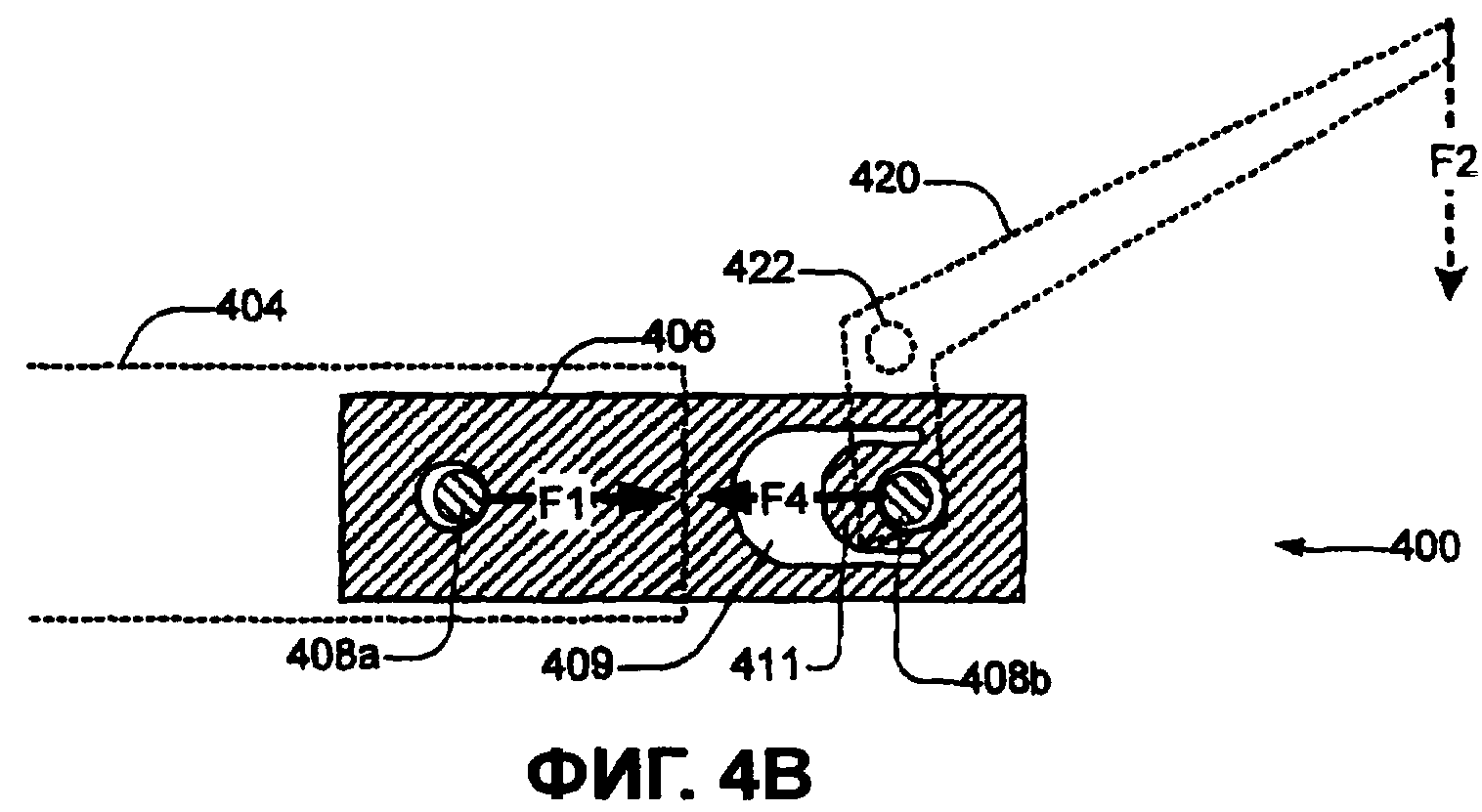
Следует понять, что могут возникнуть ситуации, когда один или более челноков УФСИ многочелночной группы сейсмических приборов застревает или застревают из-за отказов в системах якорного крепления челноков. В случае, когда якорную лапу не удается отвести в закрытое положение надлежащим образом, можно с поверхности приложить силу тяги, пытаясь разорвать механизм с пониженной прочностью якорной лапы. В данном варианте механизм с пониженной прочностью якорной лапы встроен в звено 314 якорной лапы, которое подробнее описывается в связи с фиг.4А-С чертежей, которые иллюстрируют один вариант воплощения механизма с пониженной прочностью якорной лапы в челноке УФСИ. Как показано на фиг.4А, к нажимной штанге 404 приложена сила F1, вводящая якорную лапу 402 в контакт с частью 402 стенки ствола скважины. Звено 406 якорной лапы включает в себя механизм с пониженной прочностью, выполненный с возможностью разрыва в случае приложения достаточной силы F2 к концу 420а якорной лапы, который находится в контакте со стенкой ствола скважины. На фиг.4В показано подробное изображение части 400 звена согласно фиг.4А. Как показано на фиг.4В, один конец звена 406 соединен с нажимной штангой 404 посредством соединительного пальца 408а, а другой конец звена 406 соединен с якорной лапой 420 посредством соединительного пальца 408b. Слабые места «встроены» в тело звена в месте нахождения соединительного пальца 408b или около него, а это приводит к тому, что выступ материала 411 звена окружен полостью или отверстием 409.
Слабое место звена якорной лапы подробнее изображено на фиг.6А, изображающей механизм 600 с пониженной прочностью звена якорной лапы согласно фиг.4В. Механизм 600 включает в себя часть 612 тела звена и, по меньшей мере, один соединительный палец 604. В целях упрощения, другие элементы звена якорной лапы не показаны. Слабые места «встроены» в часть тела звена путем удаления материала, как показано в местах 605а и 605b. В результате, конструктивная целостность материала тела звена около отверстий 603 под соединительные пальцы нарушена, обеспечивая наступление разрыва в этой области в случае приложения силы, имеющей достаточную величину.
Поэтому, возвращаясь к фиг.4В, можно отметить, что когда к якорной лапе прикладывается сила F2, имеющая достаточную величину, к соединительному пальцу 408b и части 411 тела звена прикладывается сила F4. Когда сила F4 окажется достаточной, (например, будет представлять собой растягивающую силу величиной примерно 200 кгс), ослабленная часть 411 тела звена разорвется, что приведет к ситуации, показанной на фиг.4С. Разрыв области 411 тела звена дает концевой части 420b якорной лапы (которая соединена с соединительным пальцем 408b) возможность свободно перемещаться в пределах полой части 409. Когда конец 420b якорной лапы движется в направлении, обозначенном стрелкой В, другой конец 420а якорной лапы движется в направлении, обозначенном стрелкой А. Таким образом, разрыв механизма с пониженной прочностью обеспечивает якорной лапе несколько дюймов свободного движения. Этот дополнительный диапазон движения якорной лапы 420 предназначен для того, чтобы способствовать высвобождению челнока УФСИ из положения, в котором он застрял внутри ствола скважины.
Обращаясь к фиг.3, отметим необходимость понять, что передача силы к слабому месту звена якорной лапы может зависеть от различных факторов, включая, например, силу трения, например, F1, создаваемую в контакте между наконечником 320а якорной лапы и стенкой ствола скважины. Такая сила трения создает крутящий момент М1 поворота вокруг оси 311 поворота якорной лапы и противодействующую силу Fw, прикладываемую к механизму с пониженной прочностью звена якорной лапы. Хотя удовлетворение этому критерию оказывается относительно простым в условиях необсаженного ствола скважины, внутри обсадной колонны может возникнуть состояние малого трения, обеспечивающее скольжение якорной лапы во время приложения к нему тяги. Например, поверхность стенки внутри обсадной колонны может быть гладкой или даже смазанной буровым раствором, вызывая скольжение якорной лапы без создания силы, достаточной для разрыва в слабом месте. В таких случаях, разрыв в слабом месте якорной лапы может не произойти, если не принять некоторые конструктивные меры для облегчения воздействия силы трения и передачи эффективной силы к слабому месту. В соответствии, по меньшей мере, с одним воплощением, можно применить механизм со специальной конструкцией наконечника лапы для облегчения наращивания силы трения и сообщения механического продвижения с целью разрыва в слабом месте. Это проиллюстрировано, например, на фиг.5А-D чертежей.
На фиг.5А-F изображены разные виды модифицированной якорной лапы в соответствии с конкретным вариантом осуществления настоящего изобретения.
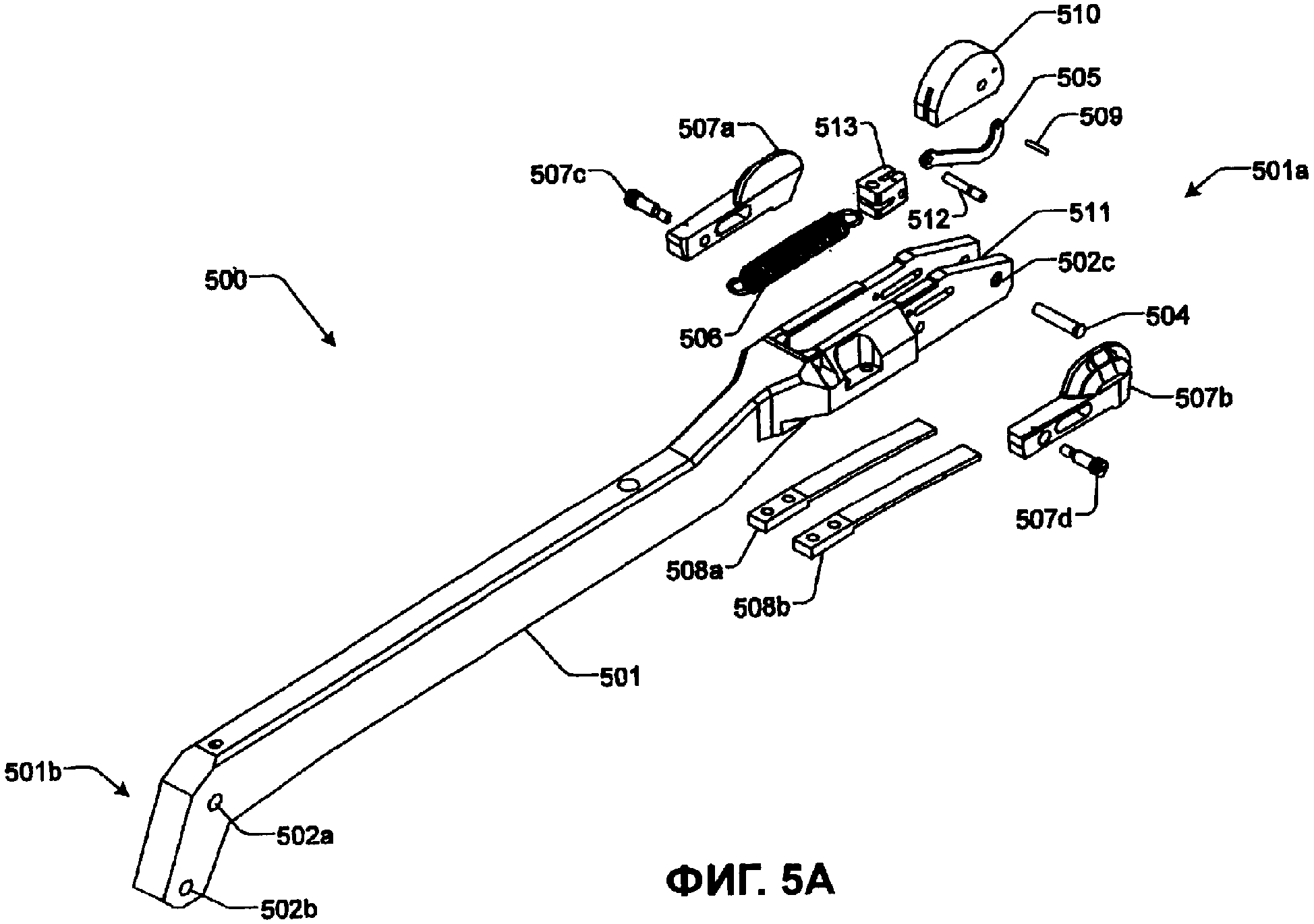
На фиг.5А показан вид с пространственным разделением деталей модифицированной якорной лапы 500 в соответствии с конкретным вариантом осуществления настоящего изобретения. Якорная лапа 500 включает в себя корпусную часть 501, имеющую два конца, а именно, 501а и 501b. Один конец 501b выполнен с возможностью крепления к звену якорной лапы (не показано) сейсмического каротажного зонда, например, такого, как челнок УФСИ. Другой конец 501а якорной лапы выполнен с возможностью контакта со стенкой ствола скважины, которая может включать или не включать в себя внутреннюю обсадную колонну. Как показано на фиг.5А, концевая часть 501а якорной лапы включает в себя паз 511 для заключения в нем съемного кулачка 510. В соответствии с одним воплощением кулачок может быть прикреплен с возможностью движения к корпусу 501 якорной лапы путем вставления кулачка 510 в паз 511 и закрепления с помощью фиксирующего пальца 504, например, посредством выравнивания отверстий 502с и 510а и вставления фиксирующего пальца 504 в эти отверстия.
В варианте осуществления согласно фиг.5А кулачок 510 может быть выполнен с возможностью, по существу, эллиптического поворота. В соответствии, по меньшей мере, с одним вариантом осуществления модифицированная якорная лапа 500 может быть выполнена таким образом, что во время обычных операций сейсмического каротажа кулачок 510 не сможет повернуться до тех пор, пока сила тяги (например, с поверхности) не создаст начальную тангенциальную силу, достаточную для начала поворота кулачка наружу. Таким образом, механизм кулачка способен интенсифицировать трение на стенке ствола скважины (которая может включать или не включать в себя внутреннюю обсадную колонну), когда кулачок поворачивается наружу. Кроме того, поворот кулачка дополнительно усиливает захват на стенке ствола скважины, поскольку создается увеличивающаяся направленная внутрь сила, которая противодействует силе якорного крепления, тем самым гарантируя, что механизм кулачка в дельнейшем повернется наружу без проскальзывания. Поворот кулачка 510 также непосредственно увеличивает механическое напряжение в слабом месте звена якорной лапы, потому что перемещение якорной лапы от стенки ствола скважины увеличивается, когда кулачок продолжает свой эллиптический поворот. В конце концов, перемещение якорной лапы оказывается достаточным, чтоб вызвать разрыв в слабом месте звена якорной лапы.
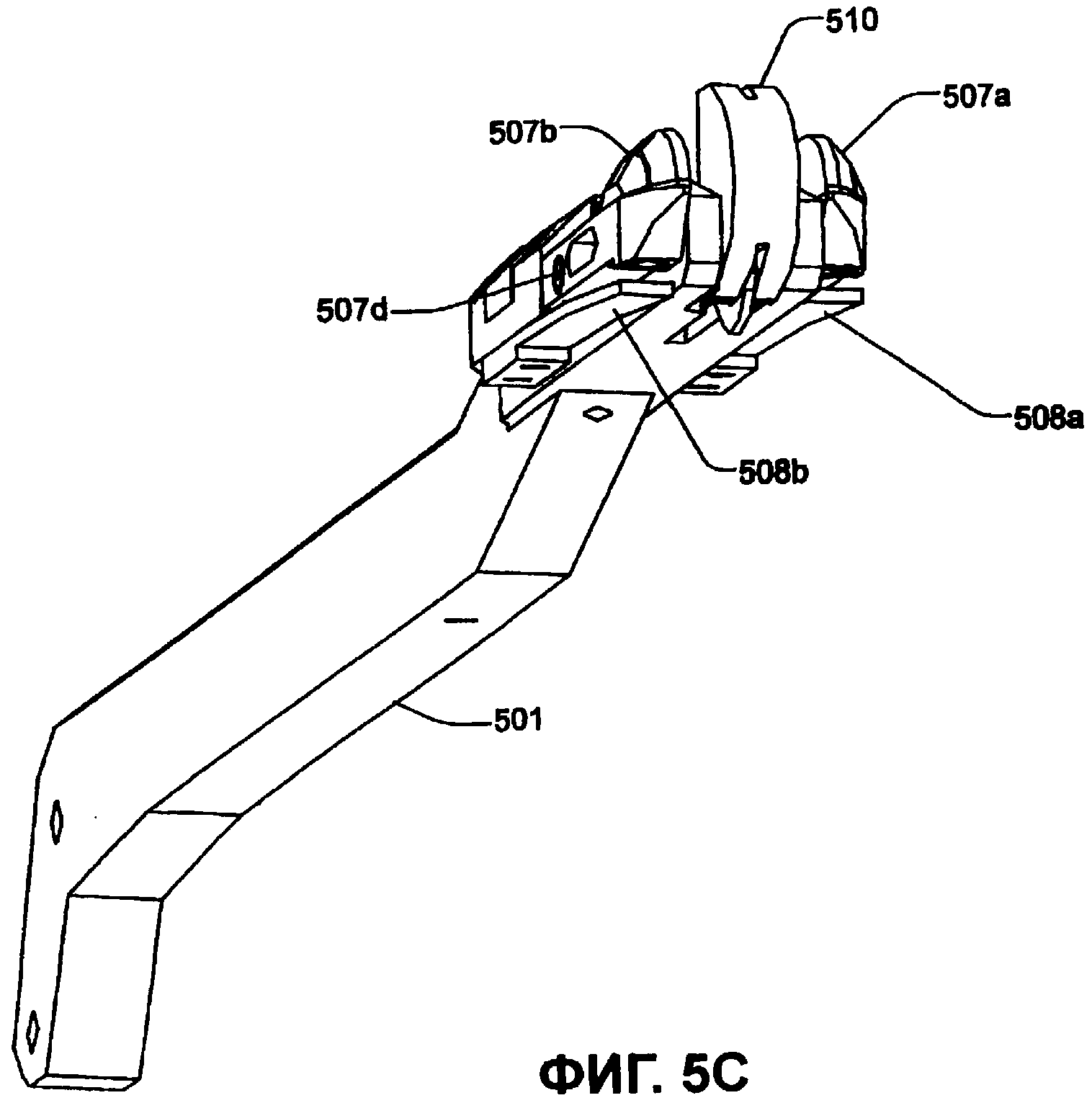
На фиг.5В-F показаны разные перспективные изображения концевой части 501а модифицированной якорной лапы 500 в соответствии с конкретным вариантом осуществления настоящего изобретения. Как показано на фиг.5В, кулачок 510 закреплен с возможностью движения в пазу 511 с использованием фиксирующего пальца 504. В соответствии с вариантом осуществления кулачок может поворачиваться внутри паза 511 вокруг оси фиксирующего пальца 504. Как подробнее поясняется ниже, поворот кулачка 510 может происходить, например, в ситуациях, где в точке контакта между кулачком 510 и стенкой ствола скважины создается сила трения при попытке разрыва в слабом месте звена якорной лапы.
В соответствии с одним воплощением модифицированная якорная лапа может включать в себя защитный механизм кулачка, такой, как изображенный, например, на фиг.5В и 5С. Защитный механизм кулачка включает в себя защитные детали 507а и 507b, которые могут быть шарнирно прикреплены к якорной лапе 501 посредством соединительных пальцев, например, 507с, 507d. В соответствии с конкретным воплощением защитные детали 507а и 507b обеспечивают защиту для кулачка 510, например, для уменьшения износа поверхности кулачка во время обычных операций сейсмического каротажа. С каждой стороны кулачка 510 размещена отдельная защитная деталь кулачка. Однако в альтернативных вариантах осуществления (не показаны) можно использовать одну-единственную защитную деталь кулачка.
Якорная лапа также может включать в себя плоские пружины 508а, 508b, которые используются для оказания воздействия жесткости пружин на защитные детали 507а, 507b кулачка с целью управления движением защитных деталей 507а, 507b кулачка. Следует понять, что плоские пружины 508а, 508b изображены на фиг.5В и 5С в значительно увеличенном масштабе для показа конструктивных особенностей плоских пружин 508а, 508b и защитных деталей 507а, 507b кулачков. В предпочтительном воплощении пружинам 508а, 508b можно придать конфигурацию или конструкцию, обеспечивающую поддержание контакта с крышечными деталями 507а, 507b кулачка, как показано, например, на фиг.5D.
В соответствии с конкретным вариантом осуществления каждая из плоских пружин 508а, 508b может обеспечивать воздействие жесткости пружины на соответствующую крышечную деталь 507а, 507b кулачка. В одном воплощении жесткость пружины, присущая плоским пружинам 508а, 508b, больше, чем сила раскрывания якорной лапы, но меньше, чем сила срабатывания или сила якорного крепления (например, сила, необходимая для якорного крепления челнока УФСИ к стенке ствола скважины). В соответствии с конкретным воплощением элементы модифицированной якорной лапы выполнены с возможностью обеспечения контакта защитных деталей кулачка со стенкой ствола скважины во время операций протаскивания (например, при перестановке многочелночной группы внутри ствола скважины). В этой ситуации, защитные детали кулачка предотвращают касание кулачком стенки ствола скважины или его сцепление с ней. Вместе с тем, если кулачок сцеплен со стенкой ствола скважины для якорного крепления к ней, сила якорного крепления будет преодолевать жесткость пружины, присущую плоским пружинам 508а, 508b, что приведет к движению защитных деталей 507а, 507b кулачка по направлению к плоским пружинам 508а, 508b. Это движение защитных деталей кулачка вызовет раскрытие кулачка и его вступление в контакт со стенкой ствола скважины.
В соответствии с конкретным воплощением поверхность защитных деталей кулачка может быть покрыта твердым материалом, например, таким, как карбид вольфрама. В предпочтительном варианте, покрытие может быть выбрано в качестве дополнительной меры для обеспечения существенно высокого уровня трения о стенку ствола скважины. Подходящие примеры включают в себя напыленный карбид вольфрама, имеющий относительно большой размер частиц. Обнаружено, что для некоторых приложений подходят размеры частиц, сравнимые с теми, которые соответствуют наждачной бумаге зернистости 50, хотя в некоторых обстоятельствах могут оказаться полезными и меньшие размеры частиц, например, сравнимые с теми, которые соответствуют наждачной бумаге зернистости 80.
В соответствии с вариантом осуществления, кулачок 510 предпочтительно выполнен с возможностью качения по стенке ствола скважины за счет силы тяги (например, с поверхности), прикладываемой между поверхностью кулачка и поверхностью стенки ствола скважины. Прикладываемая вращательная сила может зависеть, по меньшей мере, частично от коэффициента трения материала кулачка и материала поверхности стенки ствола скважины.
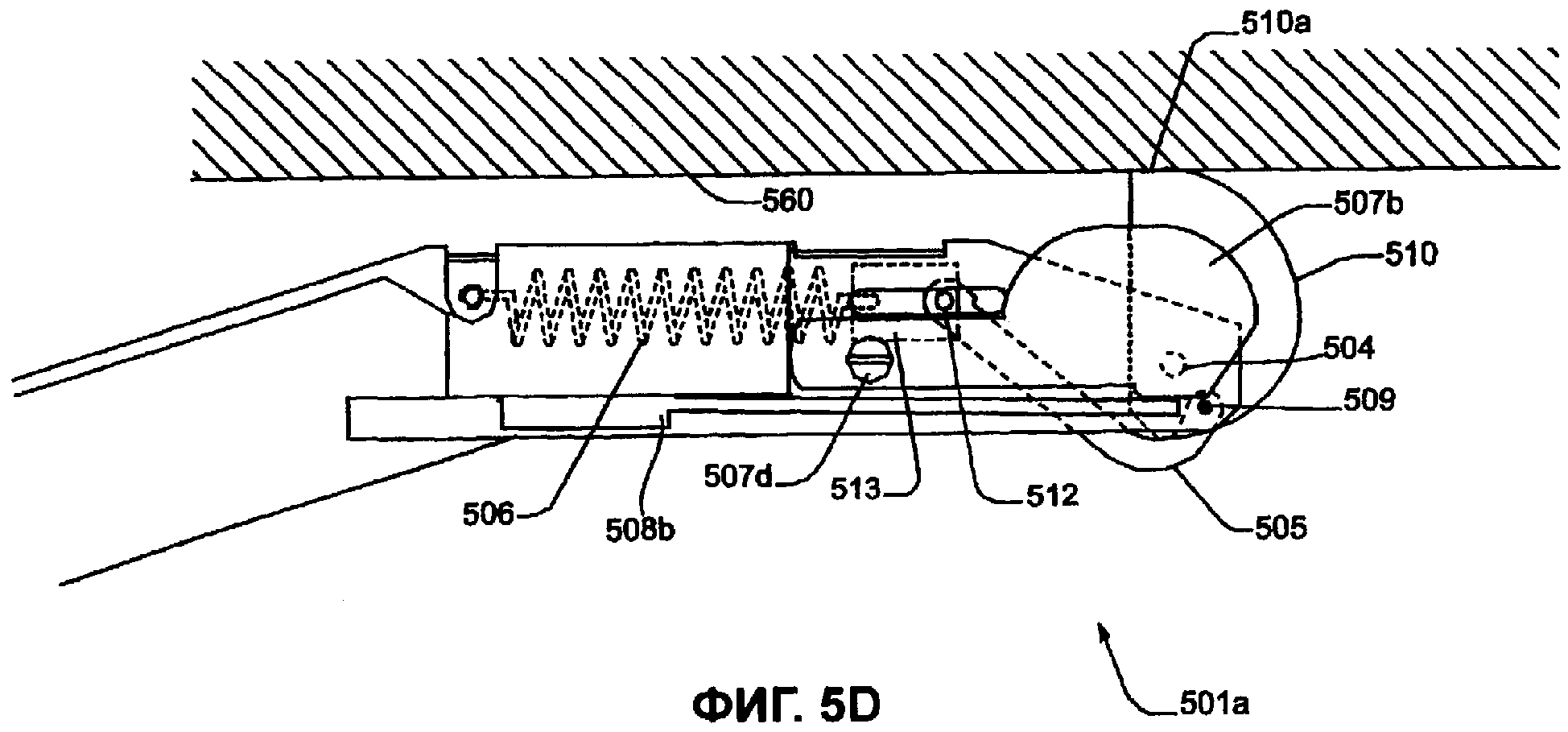
В одном из воплощений можно применить механизм временного стопора для предотвращения поворота кулачка 510 во время обычных операций сейсмического каротажа. Например, как изображено на фиг.5D-F, можно использовать пружину 506, крюк 505 и соединительный палец 509 для предотвращения поворота кулачка 510 до приложения к кулачку 510 силы, имеющей желаемую пороговую величину, достаточную для изменения направления крутящего момента Ms поворота. Так, например, как показано на фиг.5Е, жесткость Fs пружины 506 и относительная ориентация шарнирных пальцев 504, 509, 512 обеспечивает приложение крутящего момента Ms поворота к кулачку 510 в направлении против часовой стрелки, что обуславливает установку кулачка 510 в его «нормальное» положение (например, во время обычных операций).
В соответствии с конкретным вариантом осуществления при приложении к кулачку 510 силы, имеющей заданную величину (например, такая, как в случае, когда направленная вверх сила тяги прикладывается к челноку, закрепленному в стволе скважины), кулачок 510 начнет поворачиваться по часовой стрелке, что изменяет относительную ориентацию шарнирных пальцев 504, 509 и 512. Когда кулачок при повороте проходит «мертвую точку» (т.е. точку, в которой все шарнирные пальцы 504, 509 и 512 ориентированы вдоль, по существу, прямой линии), крутящего момента Ms поворота, обусловленный жесткостью Fs пружины изменяет направление, тем самым вызывая поворот кулачка 510 в «полностью выдвинутое» положение, как показано, например, на фиг.5F чертежей. Следует понять, что это изменение направления крутящего момента поворота облегчает дальнейшее движение поворота кулачка и способствует предотвращению проскальзывания кулачка по поверхности стенки ствола скважины.
В соответствии с конкретным воплощением, кулачок 510 может быть выполнен с возможностью, по существу, эллиптического поворота, вследствие чего его радиус при повороте увеличивается. В одном из воплощений величина поворота кулачка 510 может быть ограничена для предотвращения излишнего поворота кулачка в направлении, которое будет вызывать уменьшение его радиуса. Когда кулачок 510 начинает поворачиваться (например, в направлении по часовой стрелке) из своего нормального положения или положения покоя (как показано, например, на фиг.5Е), якорная лапа 501 начнет перемещаться от стенки ствола скважины на расстояние, которое можно представить как ΔD. Значение ΔD может увеличиваться, когда кулачок поворачивается, например, из своего нормального положения (фиг.5Е) в свое полностью выдвинутое положение (фиг.5F). Следует понять, что пороговая разрывающая сила, необходимая для того, чтобы вызывать разрыв механизма с пониженной прочностью якорной лапы, может зависеть и от силы срабатывания (силы якорного крепления), и от силы, прикладываемой к якорной лапе при перемещении якорной лапы на расстояние ΔD, обусловленное поворотом кулачка. Соответственно, с учетом всех этих разных сил, вносящих свой вклад в пороговую разрывающую силу в одном варианте осуществления, механизму с пониженной прочностью якорной лапы можно придать конфигурацию или конструкцию, обеспечивающую должный разрыв до того, как кулачок окажется полностью выдвинутым. В конкретных вариантах осуществления, когда соединительный палец используется в качестве механизма с пониженной прочностью якорной лапы (как представлено, например, на фиг.6В и 6С), пороговая разрывающая сила, необходимая для того, чтобы вызвать разрыв соединительного пальца, может быть связана с его прочностью на срез.
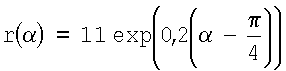
На фиг.5D показан вид сбоку, иллюстрирующий контактирование концевой части 501а модифицированной якорной лапы со стенкой ствола скважины. В своем полностью выдвинутом положении (как показано на фиг.5D) краевая часть 510а кулачка 510 контактирует с поверхностью 560 стенки ствола скважины. Следует понять, что вариант осуществления согласно фиг.5D относится к крайнему случаю, когда кулачок 510 повернут в положение максимального выдвижения. Однако в соответствии с вариантом осуществления механизм с пониженной прочностью якорной лапы может иметь конструкцию, при которой разрыв будет происходить в некоторый промежуточный момент после начала поворота кулачка 510, но до его достижения своего положения максимального выдвижения. В соответствии с различными вариантами осуществления кулачкам разных типоразмеров можно придать конфигурацию или конструкцию, обеспечивающую диапазон значений ΔD, который может составлять, например, от 3 до 30 мм (и измеряются, например, от нормального положения кулачка до его полностью выдвинутого положения). В некоторых воплощениях обнаружено, что подходящим оказывается диапазон значений ΔD от 8 до 13 мм, а, по меньшей мере, в одном приложении обнаружено, что подходящим оказывается кулачок, имеющий диапазон значений ΔD, составляющий 11 мм. Отметим, что создание дополнительной силы, воздействующей на якорную лапу 501, за счет поворота кулачка 510 является механически более эффективным способом приложения рычажного воздействия на слабое место звена якорной лапы по сравнению с обычными конструкциями якорных лап.
Следует понять, что при осуществлении способа эксплуатации модифицированной якорной лапы согласно настоящему изобретению можно использовать различные конструкции кулачка в зависимости от множества факторов, например, таких, как диаметр ствола скважины, длина якорной лапы, конструкция якорной лапы, прочность якорной лапы, твердость кулачка, поверхность кулачка, характеристики силы трения о стенку ствола скважины. Например, как изображено на фиг.5D, конструкция кулачка 510 является асимметричной и может включать в себя совокупность плоских краев и/или криволинейных краев.
Дополнительное соображение по поводу проектирования кулачка связано со скоростью увеличения радиуса кулачка в зависимости от его углового поворота. Эта идея иллюстрируется на фиг.7. Радиус (r) части 700 кулачка может изменяться в зависимости от углового поворота (α) при повороте кулачка вокруг точки О. В соответствии с одним воплощением кулачок выполнен удовлетворяющим следующим критериям:
О: центр кулачка;
С1: центр начальной круговой дуги;
С2: центр конечной круговой дуги;








В соответствии с конкретным вариантом осуществления линии C1D1 и C2D2 перпендикулярны профилю кулачка. В этом варианте осуществления их наклоны можно вычислить следующим образом:


Как показано на фиг.7, линии с вышеуказанными наклонами, проходящие через точки D1 и D2, пересекают ось Х в точках С1 и С2, соответственно. В результате получаем:
xC1=xD1 - yD1/mD1=-3,889087;
xC2=xD2 - yD2/mD2=-9,648644,
и будем иметь:
R1=|C1D1|=14,022304;
R2=|C2D2|=7,696361;
θ1=arcsin(yD1/R1)=0,588003 рад;
θ2=arcsin(yD2/R2)=0,354475 рад.
Кроме того, в соответствии с конкретным вариантом осуществления координаты точек на начальной и конечной круговых дугах получают следующим образом:
точки на начальной дуге (0<θb<θ1):
x=R1cosθb+xC1=14,022304cosθb - 3,889087;
y=R1sinθb=14,022304sinθb;
точки на конечной дуге (0<θe<θ2):
x=-R2cosθe+xC2=-7,696361cosθe -9,648644;
y=R2sinθe=7,696361 sinθe.
Другие соображения по поводу модифицированной якорной лапы (которые могут включать в себя аспекты предлагаемой конструкции кулачка) могут включать в себя один или более следующих критериев:
конструкцию модифицированного анкерного кулачка можно выполнить с обеспечением совместимости с обычными сейсмическими каротажными зондами;
конструкцию модифицированного анкерного кулачка можно выполнить с обеспечением совместимости с обычными методами сейсмического каротажа;
конструкцию модифицированного анкерного кулачка можно выполнить с обеспечением совместимости с обычными методами спасения сейсмических зондов;
конструкцию модифицированного анкерного кулачка можно выполнить с обеспечением сопряжения с обычными сейсмическими каротажными зондами;
конструкцию модифицированного анкерного кулачка можно выполнить с обеспечением возможности создания сил якорного крепления, подходящих для обычных операций сейсмического каротажа;
конструкцию модифицированного анкерного кулачка можно выполнить с обеспечением минимизации времени, требующегося для разрыва в слабом месте звена якорной лапы;
конструкцию модифицированного анкерного кулачка можно выполнить таким образом, что его влияние на акустические характеристики сейсмического каротажного зонда будет отсутствовать;
конструкцию модифицированного анкерного кулачка можно выполнить таким образом, что он, по существу, не будет оказывать влияние на диаметр и/или вес сейсмического каротажного зонда;
конструкцию модифицированного анкерного кулачка можно выполнить таким образом, что он будет способствовать защите кулачка от воздействия внешних факторов окружающей среды.
Кроме того, в конструкцию кулачка можно применить другие конструктивные особенности, например, для увеличения срока службы кулачка. Такие конструктивные особенности могут включать в себя, например следующее: использование относительно твердых материалов для формирования кулачка с тем, чтобы предотвратить преждевременный износ; модификацию поверхности кулачка текстурированием с целью улучшения фрикционного контакта со стенкой ствола скважины; модификацию поверхности кулачка (например, использование выпуклой формы или вогнутой формы) для улучшения и/или поддержания фрикционного контакта со стенкой ствола скважины и т.д.
Следует понять, что в альтернативных вариантах осуществления настоящего изобретения (не показаны) можно модифицировать якорные лапы обычных челноков УФСИ таким образом, что они будут включать в себя описанный здесь механизм кулачка. Такие модификации, как правило, должны быть известны обычному специалисту в данной области техники.
Другие варианты осуществления звена с пониженной прочностью якорной лапы
Следует понять, что существует множество разных воплощений механизма с пониженной прочностью звена якорной лапы, который можно использовать с челноком УФСИ согласно настоящему изобретению. Например, один альтернативный вариант осуществления механизма с пониженной прочностью звена якорной лапы изображен на фиг.6В чертежей.
На фиг.6В показан перспективный вид альтернативного варианта осуществления механизма с пониженной прочностью звена якорной лапы в соответствии с конкретным вариантом осуществления настоящего изобретения. Звено 650 якорной лапы включает в себя часть 662 тела звена и, по меньшей мере, один соединительный палец. В целях упрощения, другие элементы звена якорной лапы не показаны. Механизм с пониженной прочностью звена якорной лапы «встроен» в соединительный палец 654 (а не в тело звена, как показано на фиг.6А), который используется для крепления якорной лапы (не показан) к звену якорной лапы. Более конкретно, в соответствии с одним воплощением слабые места 659 «встроены» в соединительный палец 654, обеспечивая разрыв соединительного пальца (в слабых местах 659), когда к соединительному пальцу прикладывается сила, имеющая заданную величину. В соответствии с другими вариантами осуществления воплощение слабых мест 659 может быть достигнуто, например, путем использования менее прочного материала в слабых местах 659, путем удаления материала соединительного пальца в слабых местах 659 и/или другими методами ослабления конструкции. В соответствии с конкретным воплощением модифицированный соединительный палец 654 можно выполнить таким образом, что положения слабых мест 659 оказываются в пределах внутренней полости 663 звена, когда соединительный палец вставляют сквозь отверстия 653 (как показано пунктирными линиями на фиг.6В). Так, например, в воплощении согласно фиг.6В расстояние D3 (которое представляет положение слабого места 659 относительно конца соединительного пальца) предпочтительно больше, чем расстояние D1 (которое отображает толщину части тела звена). Кроме того, в соответствии с конкретным вариантом осуществления расстояние D2 (которое представляет собой расстояние между двумя слабыми местами) предпочтительно больше, чем ширина конца якорной лапы, который соединен со звеном якорной лапы.
На фиг.6С показан вид, иллюстрирующий использование механизма с пониженной прочностью согласно настоящему изобретению совместно с якорной лапой 401 в соответствии с конкретным вариантом осуществления настоящего изобретения. В данном варианте якорная лапа может включать в себя две точки 676 и 678 поворота. В соответствии с конкретным вариантом осуществления, во время развертывания сейсмического каротажного зонда на месторождении, точка 676 поворота связана со звеном 650 с использованием соединительного пальца 674. Другая точка 678 поворота связана с телом или корпусом зонда (не показан) с использованием соединительного пальца 671. В соответствии с другими воплощениями, в качестве соединительного пальца 671 можно использовать модифицированный соединительный палец, который включает в себя механизм с пониженной прочностью согласно настоящему изобретению (например, такой, как описанный в связи с фиг.6В), и/или упомянутый соединительный палец можно использовать в качестве соединительного пальца 674 и/или в качестве соединительного пальца 673. Как показано на фиг.6С, модифицированный соединительный палец, который включает в себя механизм с пониженной прочностью согласно настоящему изобретению, используется только для соединительного пальца 671 (а не для соединительных пальцев 673 и 674), потому что соединительный палец 671 проще в обслуживании и/или при замене в случае разрыва, чем соединительные пальцы 673 и 674.
Следует понять, что воплощения механизма с пониженной прочностью звена якорной лапы согласно фиг.6В и 6С обеспечивают ряд преимуществ по сравнению с другими конструкциями механизма с пониженной прочностью звена якорной лапы, такими, как показанная на фиг.6А. Например, модифицированный соединительный палец согласно настоящему изобретению, который включает в себя механизм с пониженной прочностью согласно настоящему изобретению, проще по конструкции и поэтому дешевле в изготовлении. Кроме того, замена механизма с пониженной прочностью (например, модифицированного соединительного пальца 654 со «встроенными» слабыми местами) согласно настоящему изобретению дешевле, чем замена механизма с пониженной прочностью согласно фиг.6А (т.е. тела 612 звена якорной лапы). Помимо этого, замену оторванного соединительного пальца можно провести быстрее, чем замену звена якорной лапы.
В соответствии с другими вариантами осуществления характеристики механизма с пониженной прочностью звена якорной лапы могут изменяться с изменением диаметра ствола скважины. Например, характеристики механизма с пониженной прочностью звена якорной лапы можно разработать с учетом того, что в стволах скважин относительно меньшего диаметра разрыв в слабых местах звена якорной лапы может стать труднее осуществимым. Кроме того, как сказано выше, характеристики механизма с пониженной прочностью звена якорной лапы могут зависеть от величины силы, создаваемой в месте контакта между наконечником якорной лапы и стенкой ствола скважины. Характеристики механизма с пониженной прочностью звена якорной лапы могут зависеть от других, дополнительных элементов многочелночной группы сейсмических приборов. Например, в соответствии, по меньшей мере, с одним воплощением, сила, требующаяся для разрыва механизма с пониженной прочностью звена якорной лапы, не превышает силу, требующуюся для разрыва соединительного кабеля УФСИ.
Промышленная применимость
Настоящее изобретение находит применение в области скважинных каротажных зондов, в частности, сейсмических многочелночных каротажных зондов, которые можно использовать для оценки пластов, окружающих стволы скважин, такие, как те, которые пробурены для добычи углеводородов или геотермальной энергии.
Хотя выше, со ссылками на прилагаемые чертежи, приведено подробное описание нескольких предпочтительных вариантов осуществления, следует понять, что изобретение не ограничивается именно этими вариантами осуществления, и специалист в данной области техники сможет осуществить различные изменения и модификации в рамках существа и объема притязаний изобретения, охарактеризованного в прилагаемой формуле изобретения.
Реферат
Группа изобретений относится к области проведения каротажа для оценки окружающих подземных пластов. Описан способ высвобождения скважинного сейсмического зонда для сбора данных из положения, в котором он застрял внутри ствола скважины. Скважинный сейсмический зонд для сбора данных включает в себя корпус зонда, имеющий, по меньшей мере, один модуль датчика. Скважинный сейсмический зонд для сбора данных дополнительно включает в себя якорную лапу и звено якорной лапы, выполненное с возможностью соединения якорной лапы с корпусом зонда. Звено якорной лапы включает в себя механизм с пониженной прочностью, выполненный с возможностью разрыва в ответ на воздействие разрывающей силы, имеющей минимальную пороговую величину, прикладываемой к механизму с пониженной прочностью. Разрыв механизма с пониженной прочностью приводит к высвобождению скважинного сейсмического зонда для сбора данных из положения, в котором он застрял. В соответствии с конкретным вариантом осуществления поворот кулачка у поверхности стенки ствола скважины может быть вызван силой тяги, прикладываемой к верхней части скважинного сейсмического зонда для сбора данных. Изобретение обеспечивает повышение надежности каротажа сейсмическим приборам. Изобретение обеспечивает повышение надежности каротажа сейсмическими приборами. 3 н. и 23 з.п. ф-лы, 7 ил.
Формула
где
обнаружение отказа отвода якорной лапы;
поворот кулачка у поверхности стенки ствола скважины в ответ на обнаружение отказа отвода якорной лапы, вызывающий приложение первой силы к механизму с пониженной прочностью;
разрыв механизма с пониженной прочностью, вызванный, по меньшей мере, частично поворотом кулачка у поверхности стенки ствола скважины.
Комментарии