Система и способ мониторинга функционального состояния погрузочно-разгрузочного транспортного средства - RU2585942C2
Код документа: RU2585942C2
Чертежи



Описание
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится в целом к погрузочно-разгрузочным транспортным средствам, и в частности, к системе мониторинга их функционального состояния.
УРОВЕНЬ ТЕХНИКИ
Погрузочно-разгрузочные транспортные средства традиционно включают в себя тормозные системы, сочетающие рекуперативное торможение с использованием тягового электродвигателя устройства, которое можно назвать торможением противотоком, с механическими тормозами. Поскольку рекуперативное торможение экономит заряд батареи и не подвергается износу в отличие от механических тормозов, желательно использовать электродвигатель для максимально возможного удовлетворения требований рабочего торможения. При условии достаточной мощности тягового двигателя практически все рабочее торможение можно выполнять при помощи тягового двигателя вместе с механическими тормозами, использующимися только для стоянки и резервного торможения, которое может понадобиться в необычных условиях эксплуатации, как, например, использование устройств на поверхностях с большим уклоном и/или при чрезмерных нагрузках по неосторожности.
В примерах, где первичной или основной формой торможения устройства является рекуперативное торможение или его конструкция такова, что механический тормоз отделен от колесного участка трансмиссии, для передачи тягового усилия и усилия торможения на колеса транспортного средства используется ряд механических соединительных муфт. Если самые важные из данных соединительных механических компонентов ослабляются или разрушается их конструкция, это может отрицательно сказаться на характеристиках торможения транспортного средства и его управляемости.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Варианты осуществления настоящего изобретения относятся к системам и способам динамического мониторинга функционального состояния одной или более трансмиссий транспортного средства промышленного назначения. Динамический мониторинг включает в себя наблюдение за множеством эксплуатационных параметров транспортного средства промышленного назначения и анализ данных параметров, чтобы определить, что имеется механический отказ, приводящий к разъединению тягового двигателя и, возможно, механического тормоза и колеса. После динамического определения возможного механического отказа проводится проверка транспортного средства в статическом режиме промышленного назначения, когда транспортное средство остановлено для проверки точности динамического определения. На основании результатов проверки в статическом режиме определяется, действительно ли произошел механический отказ или нет. В случае подтверждения факта механического отказа ограничивается работоспособность транспортного средства промышленного назначения. Если факт механического отказа не подтверждается, активируются все эксплуатационные возможности транспортного средства промышленного назначения.
В соответствии с первым аспектом настоящего изобретения предлагается способ динамического мониторинга одной или более трансмиссий транспортного средства промышленного назначения. Способ включает в себя наблюдение за множеством эксплуатационных параметров транспортного средства промышленного назначения в процессе его работы; определение факта отказа трансмиссии с использованием эксплуатационных параметров, если обнаруживается отказ трансмиссии, проверку в статическом режиме на транспортном средстве промышленного назначения для подтверждения динамического отказа трансмиссии, причем проверка в статическом режиме проводится на неподвижном транспортном средстве промышленного назначения; определение на основании результатов проверки в статическом режиме факта наличия или отсутствия отказа во время проверки в статическом режиме; и ограничение возможностей управления перемещением транспортного средства промышленного назначения в случае отказа во время проверки в статическом режиме.
Соответствующие наблюдения могут проводиться при движущемся транспортном средстве: соответственно, в контексте настоящего изобретения, множество эксплуатационных параметров наблюдается, когда транспортное средство находится в движении.
Определение факта отказа трансмиссии может заключаться в определении того, что при повороте направо быстрее ли вращается правый тяговый двигатель, чем левый тяговый двигатель.
Определение факта отказа трансмиссии может заключаться в определении того, что при повороте налево быстрее ли вращается левый тяговый двигатель, чем правый тяговый двигатель.
Определение факта отказа трансмиссии может заключаться в определении того, превышает ли разница между первым током, потребляемым левым тяговым двигателем, и вторым током, потребляемым правым тяговым двигателем, заданное пороговое значение. Способ может также заключаться в определении того, находится ли угол поворота в диапазоне примерно ±10°.
Определение факта отказа трансмиссии может заключаться в определении расчетной частоты вращения тягового двигателя на внутренней стороне поворота на основании определенного угла поворота и определенной частоты вращения тягового двигателя на внешней стороне поворота; и определении того, превышает ли фактическая частота вращения тягового двигателя на внутренней стороне поворота расчетную частоту вращения.
Определение факта отказа трансмиссии может заключаться в определении предела частоты вращения для транспортного средства промышленного назначения; и определении того, превышает ли соответствующая частота вращения правого тягового двигателя или левого тягового двигателя предел частоты вращения.
Определение факта отказа трансмиссии может заключаться в определении того, равняется ли соответствующая частота вращения одного из левого или правого тягового двигателя нулю при соответствующей частоте вращения другого из правого или левого тягового двигателя выше нуля.
Определение факта отказа трансмиссии может заключаться в определении того, превышает ли соответствующая величина ускорения правого тягового двигателя или левого тягового двигателя заданный предел.
В соответствии со вторым аспектом настоящего изобретения предлагается транспортное средство промышленного назначения, содержащее приводной узел, по меньшей мере одно ведущее колесо; по меньшей мере один тяговый двигатель; по меньшей мере одну трансмиссию между по меньшей мере одним ведущим колесом и по меньшей мере одним тяговым двигателем; по меньшей мере один механический тормоз для передачи тормозного усилия на по меньшей мере одно колесо; и модуль контроллера. Модуль контроллера может выполнять программные инструкции по наблюдению за множеством эксплуатационных параметров транспортного средства промышленного назначения в процессе его работы; определению факта отказа трансмиссии с использованием эксплуатационных параметров; проведению в случае обнаружения отказа трансмиссии проверки в статическом режиме на транспортном средстве промышленного назначения для подтверждения динамического отказа трансмиссии при проведении проверки в статическом режиме на неподвижном транспортном средстве промышленного назначения; определению на основании результатов проверки в статическом режиме факта наличия или отсутствия отказа во время проверки в статическом режиме; и ограничению возможностей управления перемещением транспортного средства промышленного назначения в случае отказа во время проверки в статическом режиме.
Транспортное средство промышленного назначения может также включать в себя по меньшей мере один датчик с обратной связью для отслеживания частоты вращения по меньшей мере одного тягового двигателя.
Определение факта отказа трансмиссии может заключаться в определении того, быстрее ли при повороте направо вращается правый тяговый двигатель, чем левый тяговый двигатель.
Определение факта отказа трансмиссии может заключаться в определении расчетной частоты вращения тягового двигателя на внутренней стороне поворота на основании определенного угла поворота и определенной частоты вращения тягового двигателя на внешней стороне поворота; и определении того, превышает ли фактическая частота вращения тягового двигателя на внутренней сторон расчетную частоту вращения.
Определение факта отказа трансмиссии может заключаться в определении предела частоты вращения для транспортного средства промышленного назначения; и определении того, превышает ли частота вращения по меньшей мере одного тягового двигателя предел частоты вращения.
Определение факта отказа трансмиссии может заключаться в определении того, равняется ли соответствующая частота вращения одного из левого или правого тягового двигателя нулю при соответствующей частоте вращения другого из правого или левого тягового двигателя выше нуля.
Определение факта отказа трансмиссии может заключаться в определении того, превышает ли соответствующая величина ускорения правого тягового двигателя или левого тягового двигателя заданный предел.
В соответствии с третьим аспектом настоящего изобретения предлагается способ динамического мониторинга одной или более трансмиссий транспортного средства промышленного назначения. Данный способ может включать в себя наблюдение за множеством эксплуатационных параметров транспортного средства промышленного назначения в процессе его работы; определение факта отказа в ходе проверки редуктора в динамическом режиме редуктора на основании одного или более из множества эксплуатационных параметров; проведение проверки в статическом режиме на транспортном средстве промышленного назначения для подтверждения отказа при проверке редуктора в динамическом режиме в ходе проведения проверки в статическом режиме на неподвижном транспортном средстве промышленного назначения; определение на основании результатов проверки в статическом режиме факта наличия или отсутствия отказа во время проверки в статическом режиме; и ограничение возможностей управления перемещением транспортным средством промышленного назначения в случае отказа во время проверки в статическом режиме.
Определение факта отказа в ходе проверки редуктора в динамическом режиме может заключаться в определении того, быстрее ли вращается при повороте направо правый тяговый двигатель, чем левый тяговый двигатель.
Определение факта отказа в ходе проверки редуктора в динамическом режиме может заключаться в определении того, быстрее ли вращается при повороте налево левый тяговый двигатель, чем правый тяговый двигатель.
Определение факта отказа в ходе проверки редуктора в динамическом режиме может заключаться в определении того, превышает ли разница между первым током, потребляемым левым тяговым двигателем, и вторым током, потребляемым правым тяговым двигателем, заданное пороговое значение.
Определение факта отказа в ходе проверки редуктора в динамическом режиме может заключаться в определении расчетной частоты вращения тягового двигателя на внутренней стороне поворота на основании определенного угла поворота и определенной частоты вращения тягового двигателя на внешней стороне поворота; и определении того, превышает ли фактическая частота вращения тягового двигателя на внутренней стороне поворота расчетную частоту вращения.
Определение факта отказа в ходе проверки редуктора в динамическом режиме может заключаться в определении предела частоты вращения для транспортного средства промышленного назначения; и определении того, превышает ли частота вращения по меньшей мере одного тягового двигателя предел частоты вращения.
Определение факта отказа в ходе проверки редуктора в динамическом режиме может заключаться в определении того, равняется ли соответствующая частота вращения одного из левого или правого тягового двигателя нулю при соответствующей частоте вращения другого из правого или левого тягового двигателя выше нуля.
Определение факта отказа в ходе проверки редуктора в динамическом режиме может заключаться в определении того, превышает ли соответствующая величина ускорения правого тягового двигателя или левого тягового двигателя заданный предел.
Проверка в статическом режиме может включать в себя выведение из зацепления первого фрикционного тормоза, соединенного с первым тяговым двигателем; введение в зацепление второго фрикционного тормоза, соединенного со вторым тяговым двигателем; включение питания первого тягового двигателя для создания первого крутящего момента с первым заданным значением, где первого крутящего момента достаточно для вращения первого тягового двигателя, если первый тяговый двигатель отсоединяется от первого редуктора; определение того, вращается ли первый тяговый двигатель в результате действия первого крутящего момента; и определение факта отказа в ходе проверки в статическом режиме при вращении первого тягового двигателя. Проверка в статическом режиме может также включать в себя выведение из зацепления второго фрикционного тормоза; введение в зацепление первого фрикционного тормоза; включение питания второго тягового двигателя для создания второго крутящего момента со вторым заданным значением, где второго крутящего момента достаточно для вращения второго тягового двигателя, если второй тяговый двигатель отсоединяется от второго редуктора; определение того, вращается ли второй тяговый двигатель в результате действия второго крутящего момента; и определение факта отказа в ходе проверки в статическом режиме при вращении второго тягового двигателя.
В соответствии с четвертым аспектом настоящего изобретения предлагается способ динамического мониторинга одной или более трансмиссий транспортного средства промышленного назначения. Способ может включать в себя наблюдение за множеством эксплуатационных параметров транспортного средства промышленного назначения в процессе его работы, и определение факта отказа трансмиссии с использованием эксплуатационных параметров.
Определение факта отказа трансмиссии может заключаться в определении того, быстрее ли при повороте направо вращается правый тяговый двигатель, чем левый тяговый двигатель.
Определение факта отказа трансмиссии может заключаться в определении того, быстрее ли при повороте налево вращается левый тяговый двигатель, чем правый тяговый двигатель.
Определение факта отказа трансмиссии может заключаться в определении того, превышает ли разница между первым током, потребляемым левым тяговым двигателем, и вторым током, потребляемым правым тяговым двигателем, заданное пороговое значение.
Определение факта отказа трансмиссии может заключаться в определении расчетной частоты вращения тягового двигателя на внутренней стороне поворота на основании определенного угла поворота и определенной частоты вращения тягового двигателя на внешней стороне поворота, и определении того, превышает ли фактическая частота вращения тягового двигателя на внутренней стороне поворота расчетную частоту вращения.
Определение факта отказа трансмиссии может заключаться в определении предела частоты вращения для транспортного средства промышленного назначения; и определении того, превышает ли соответствующая частота вращения правого тягового двигателя или левого тягового двигателя предел частоты вращения.
Определение факта отказа трансмиссии может заключаться в определении того, равняется ли соответствующая частота вращения одного из левого или правого тягового двигателя нулю при соответствующей частоте вращения другого из правого или левого тягового двигателя выше нуля.
Определение факта отказа трансмиссии может заключаться в определении того, превышает ли соответствующая величина ускорения правого тягового двигателя или левого тягового двигателя заданный предел.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
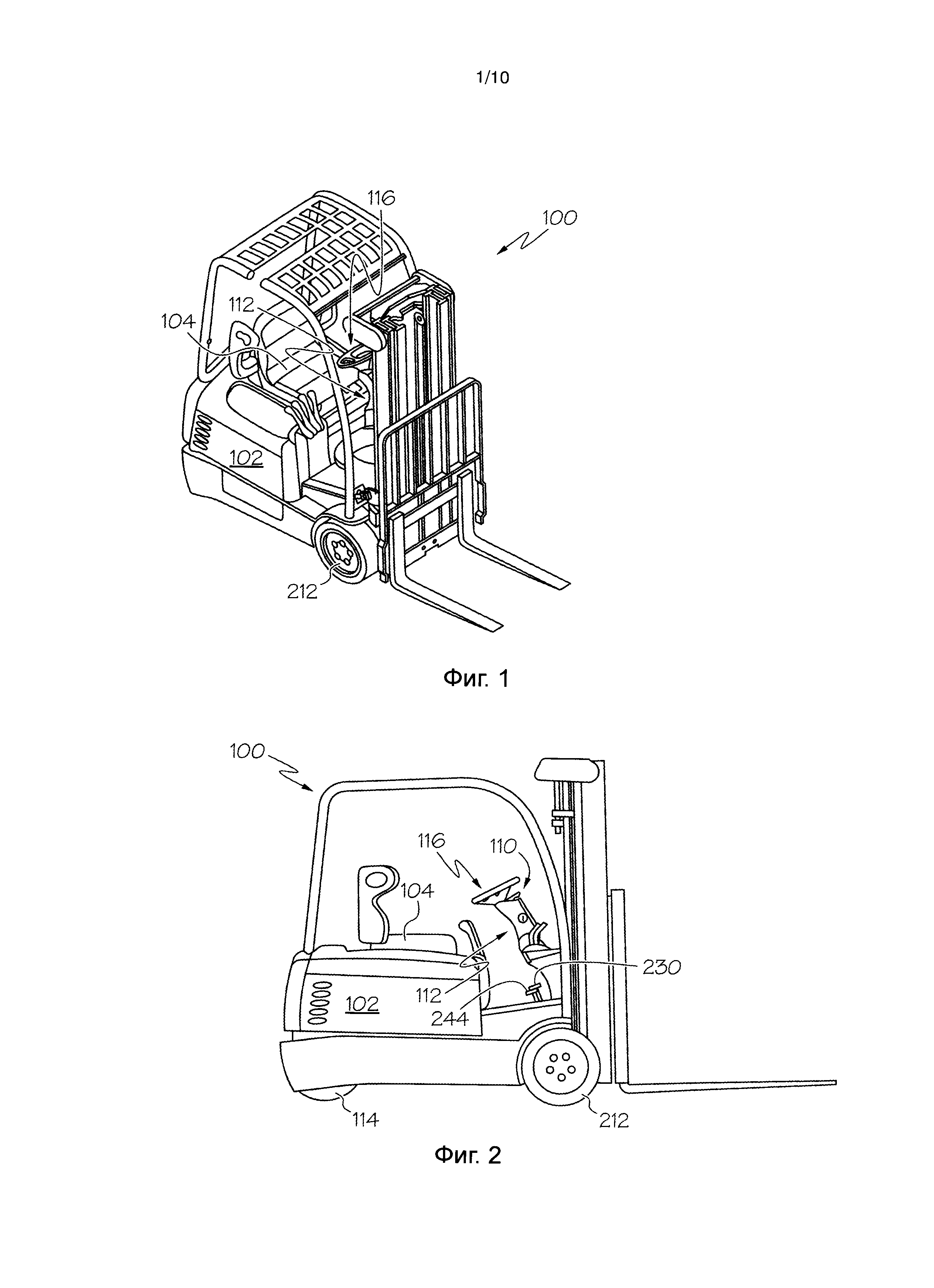
Фиг. 1 представляет вид в перспективе погрузочно-разгрузочного транспортного средства, изображенного в виде автопогрузчика с противовесом с управлением в положении «сидя», функционирующего в соответствии с тем, как изложено в настоящей заявке.
Фиг. 2 представляет вид сбоку автопогрузчика с противовесом, показанного на фиг. 1.
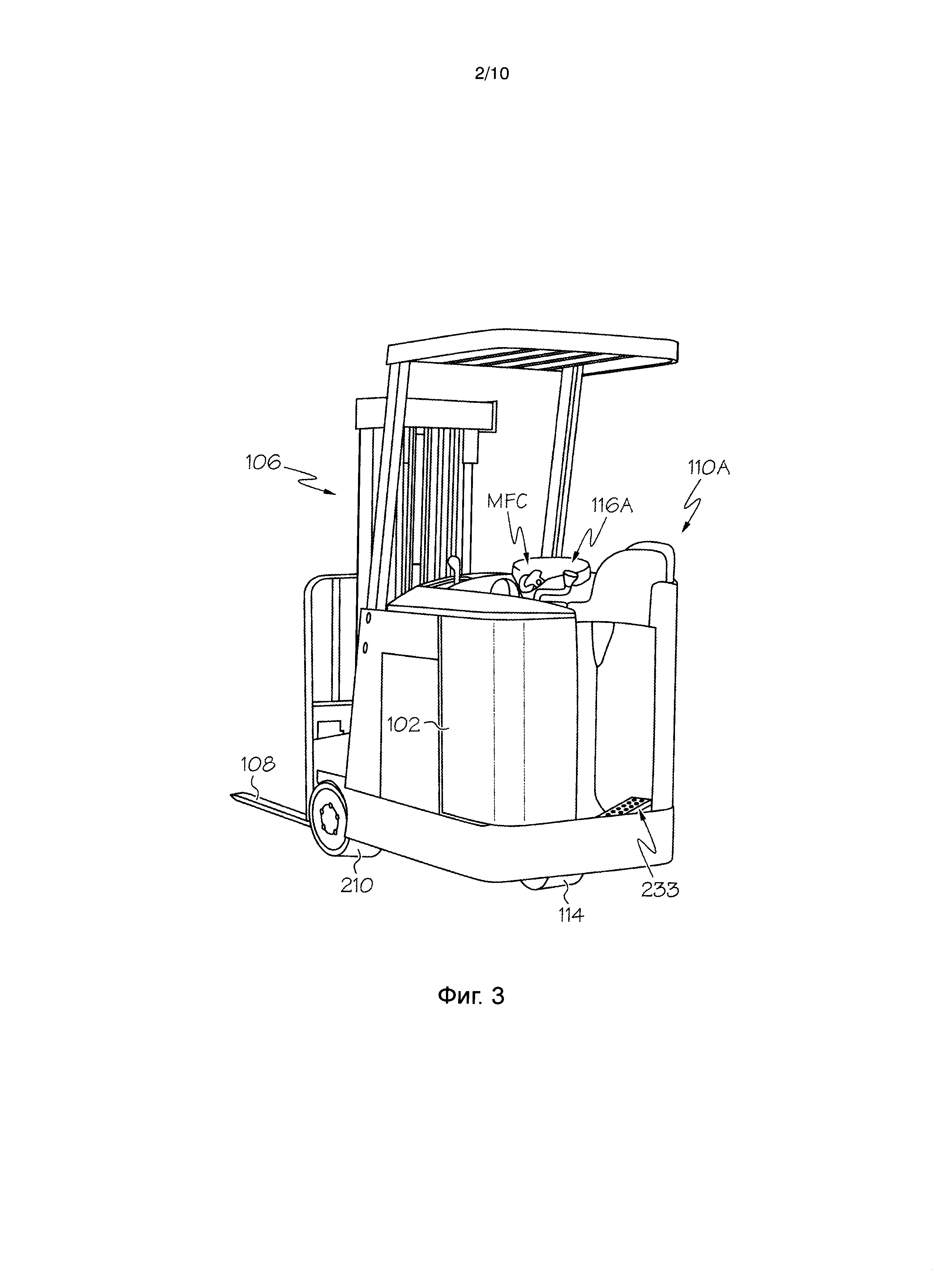
Фиг. 3 представляет вид в перспективе автопогрузчика с противовесом с управлением в положении «стоя», функционирующего в соответствии с с тем, как изложено в настоящей заявке.
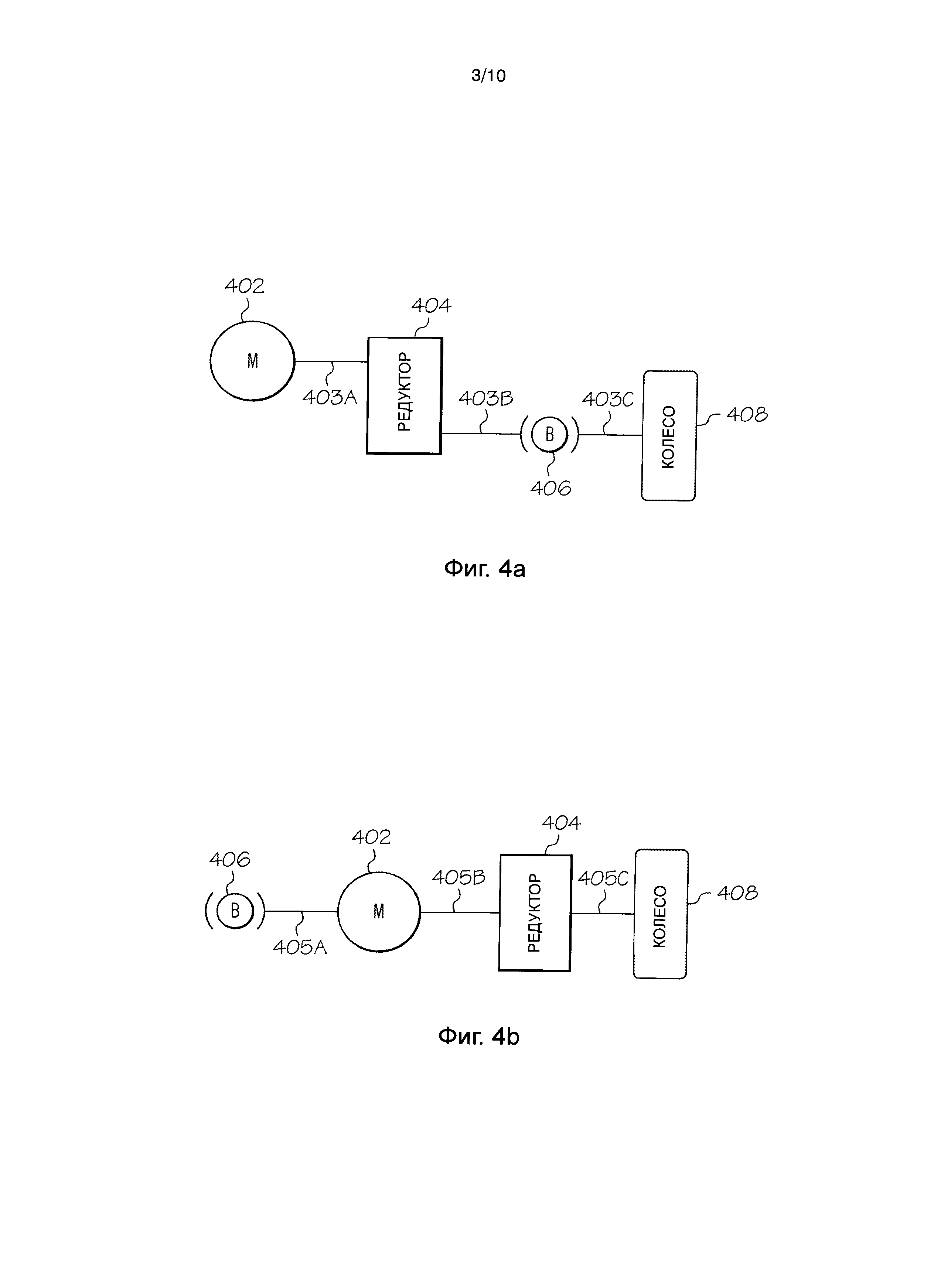
Фиг. 4А представляет блок-схему конструкции тормоза, связанного с колесом.
Фиг. 4В представляет блок-схему конструкции тормоза, связанного с двигателем.
Фиг. 5 представляет структурную схему уровней компонентов транспортного средства, предусматривающую системы и способы диагностики и мониторинга в соответствии с принципами настоящей заявки.
Фиг. 6 показывает взаимосвязь между частотой вращения шины на внутренней стороне поворота и шины на внешней стороне поворота и погрузочно-разгрузочного транспортного средства в процессе поворотов с различными углами.
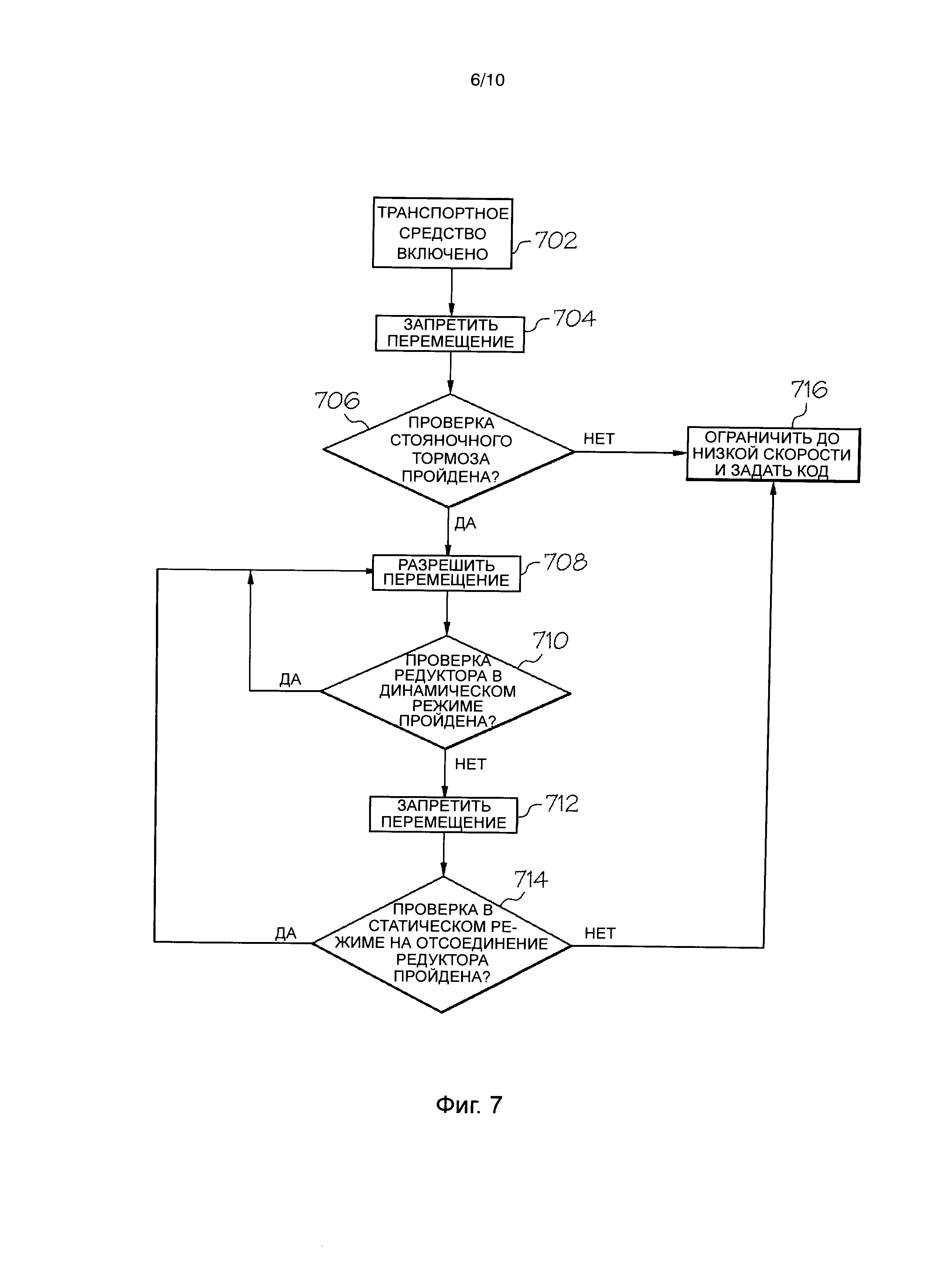
Фиг. 7 представляет блок-схему примера процесса мониторинга целостности трансмиссии погрузочно-разгрузочного транспортного средства в соответствии с принципами настоящей заявки.
Фиг. 8 представляет блок-схему процесса для проверки функционального состояния стояночного тормоза погрузочно-разгрузочного транспортного средства в соответствии с принципами настоящей заявки.
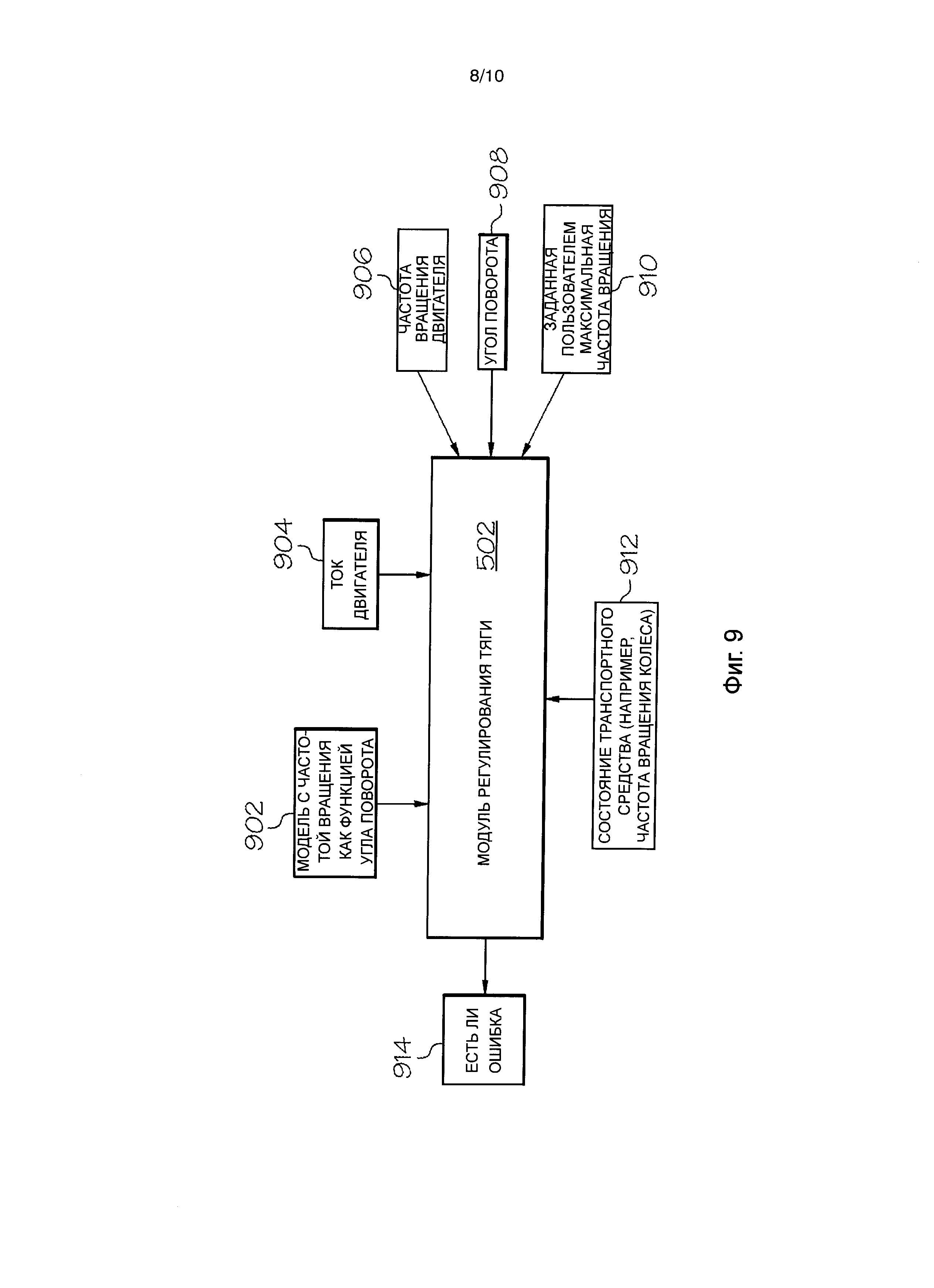
Фиг. 9 демонстрирует концептуальное представление исходных данных и результатов системы и способа проверки в динамическом режиме в соответствии с принципами настоящей заявки.
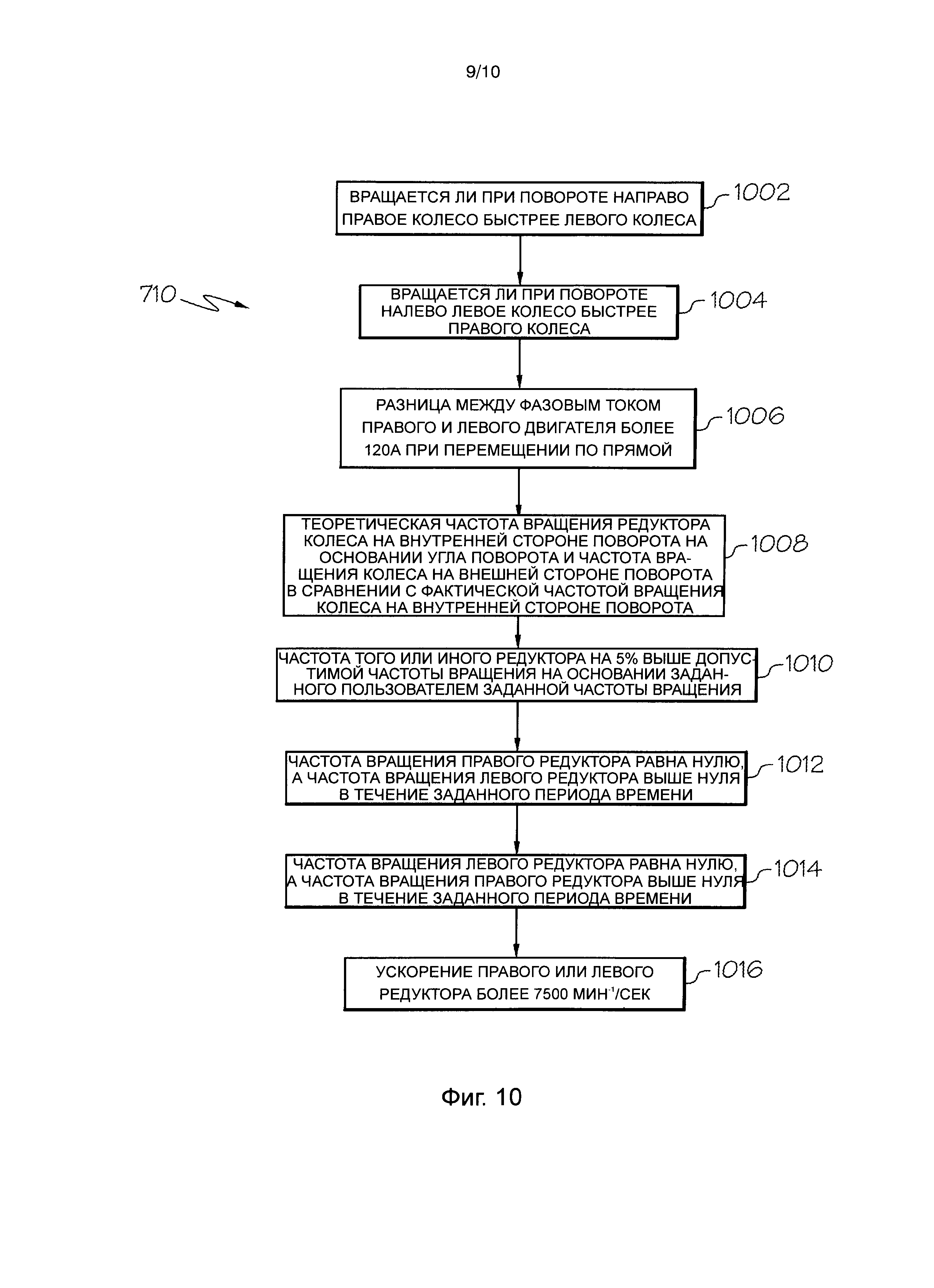
Фиг. 10 представляет подробную блок-схему одного модельного процесса для реализации системы и способа проверки в динамическом режиме в соответствии с принципами настоящей заявки.
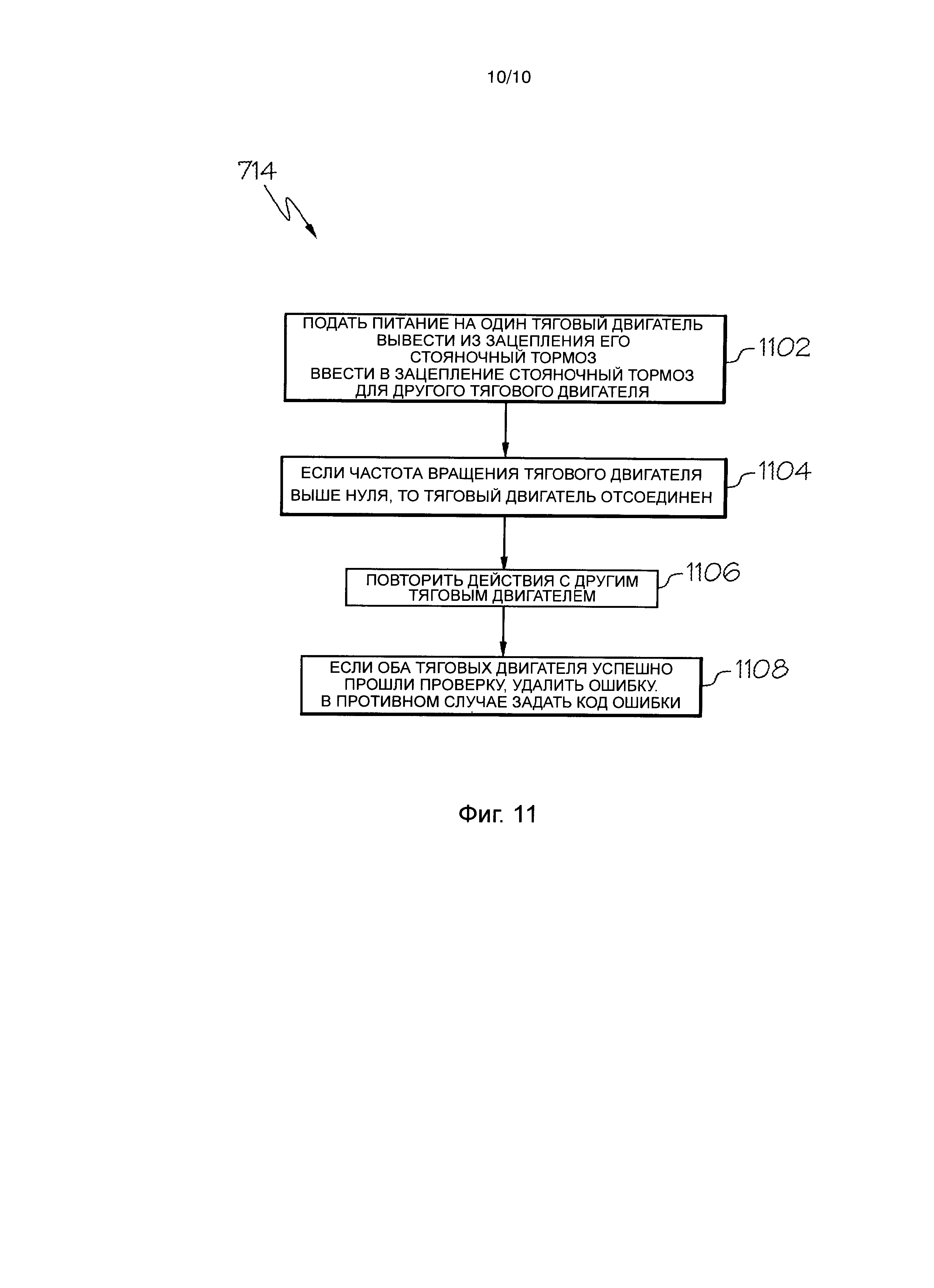
Фиг. 11 представляет собой подробную блок-схему статической проверки в соответствии с принципами настоящей заявки.
ЛУЧШИЙ СПОСОБ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
На фиг. 1 и 2 представлен вид в перспективе и вид сбоку соответственно трехколесного автопогрузчика 100 с противовесом с управлением в положении «сидя», для которого может изначально использоваться изобретение, являющееся предметом настоящей заявки. Хотя настоящее изобретение может описываться в данной заявке со ссылкой на автопогрузчик 100 с противовесом с управлением в положении «сидя», для специалистов в данной области техники очевидно, что изобретение и варианты осуществления настоящего изобретения могут применяться в более широком смысле к различным другим погрузочно-разгрузочным транспортным средствам (также именуемым в настоящем документе «транспортными средствами промышленного назначения»), включая, в том числе, трехколесный автопогрузчик 100А с управлением в положении «стоя», показанный на фиг. 3. Компоненты, которые можно использовать для осуществления изобретения по настоящей заявке на транспортном средстве 10, как, например, автопогрузчики 100, 100А, показаны схематично на фиг. 5, а также обозначены на фиг. 1, 2 и 3, постольку поскольку данные компоненты видимы на фиг. 1, 2 и 3. Предполагается, что для настоящего изобретения могут использоваться другие компоненты и взаиморасположение компонентов с тем, чтобы настоящее изобретение не ограничивалось данными компонентами или данным взаимным расположением.
Контроллер 502 для сдвоенных тяговых двигателей с обратной связью, иногда именуемый модулем регулирования тяги (МРТ) и расположенный в приводном узле 102 погрузчика 10, 100, 100А, содержит силовую электронику для управления левым приводным двигателем 512А и правым приводным двигателем 512В независимо друг от друга как торможения, так и мониторинга режимов работы. В рабочем варианте осуществления изобретения для контроллера 502 электродвигателя был использован один из нескольких серийно выпускаемых контроллеров. Сдвоенные тяговые двигатели, т.е. левый тяговый двигатель 512А и правый тяговый двигатель 512В, подсоединяются к независимым редукторам 510A, 510В соответственно для управления левым ведущим колесом 210, 508А и правым ведущим колесом 212, 508В, см. фиг. 1-3 и 5. В рабочем варианте осуществления изобретения левый и правый тяговые двигатели 512А, 512В представляют собой трехфазные асинхронные двигатели переменного тока; однако изобретение по настоящей заявке не ограничивается техникой двигателей переменного тока, что очевидно для специалистов в данной области техники. Изобретение по настоящей заявке также может использоваться для автопогрузчиков, приводимых в движение одним тяговым двигателем вместо сдвоенных тяговых двигателей и отдельных контроллеров привода, которые при желании можно использовать для левого и правого тяговых двигателей 512А, 512В. Для управления тяговыми двигателями 512А, 512В используются независимые датчики 516А, 516В с обратной связью, отслеживающие частоту и направление вращения тяговых двигателей 512А, 512В соответственно.
Механический пружинный первый тормоз 514А, отпускающий при подаче электрического сигнала, соединяется с левым тяговым двигателем 512А для обеспечения процента или доли X от общего усилия механического торможения, составляющего 100% или 1 и используемого для стоянки и резервного торможения погрузчика 10, 100, 100А. Хотя значение X может находиться в целом диапазоне долей, в рабочем варианте осуществления погрузчика, включающем описанную тормозную систему, использовалось 33% или 1/3 от общего усилия механического торможения. Механический пружинный второй тормоз 514В, отпускающий при подаче электрического сигнала, соединяется с правым тяговым двигателем 512В для обеспечения доли Υ от общего усилия механического торможения, составляющего 1 и используемого для стоянки и резервного торможения погрузчика 10, 100, 100А. Доля Υ дополняет долю X, так что при работе обоих тормозов 516А, 516В обеспечивается 100%-ное торможение, необходимое для стоянки и в резервных целях, т.е. Χ+Υ=1. Поскольку X составил 1/3 от описанного выше рабочего варианта осуществления изобретения, Υ составил 2/3. Можно использовать другие соотношения долей, при этом в основе выбора соответствующих долей лежит, например, геометрия транспортного средства и сведение к минимуму вероятности сворачивания в сторону погрузчика. Пружинные тормоза, отпускающие при подаче электрического сигнала, могут более непосредственно соединяться с колесами, закрепленными на противоположных сторонах автопогрузчика, что необходимо, например, для автопогрузчика с одним тяговым двигателем.
Дисплейный модуль 506 управления (ДМУ), предусмотренный независимо от контроллера 502 тягового двигателя, включает в себя отказоустойчивую цепь возбуждения путем подачи питания на первый тормоз 514А с использованием первой пары ведущих элементов (не показаны), соединенных с первым тормозом 514А через первую пару проводников С1, и подачи питания на второй тормоз 514В с использованием второй пары ведущих элементов (не показаны), соединенных со вторым тормозом 514В через вторую пару проводников С2. Вследствие наличия пар ведущих элементов и проводников, т.е. отдельного управления каждым из положительных и отрицательных питающих проводов, в случае размыкания цепи управления или токопроводящей дорожки для любой из полярностей питания соответствующий механический тормоз невозможно отпустить при подаче электрического сигнала через разомкнутую цепь управления/питания, и, следовательно, соответствующий тормоз будет включаться под действием пружины.
Наличие оператора на погрузчике определяется датчиком 518 присутствия оператора. В погрузчике 100 датчик 518 присутствия оператора может представлять собой обычный замыкатель обнаружения оператора (не показан), срабатывающий, когда оператор садится на сиденье 104 погрузчика 100. При этом сигнал о присутствии оператора, генерируемый замыкателем, поступает в контроллер 502 тягового двигателя и дисплейный модуль 506 управления. Вместо использования жесткой разводки для соединения контроллера 502 тягового двигателя и дисплейного модуля 506 управления в транспортных средствах, использующих канал 504 связи, например локальную сеть контроллеров (CAN), контроллер 502 тягового двигателя и дисплейный модуль 506 управления могут делиться общей информацией через канал 504 связи. В погрузчиках с управлением из положения «стоя», как, например, погрузчик 100А, показанный на фиг. 3, датчик 518 присутствия оператора может представлять собой обычный замыкатель (не показан), соединенный с ножной педалью 233, которую оператор вводит в зацепление для функционирования погрузчика. В качестве датчика присутствия оператора могут использоваться другие конструкции и устройства обнаружения присутствия, такие как датчики Холла, емкостные датчики, бесконтактные датчики и т.п. Дисплейный модуль 506 управления можно изготавливать с использованием широкого спектра электрических и/или электронных компонентов, что станет очевидным для специалистов в данной области техники после сущности изобретения, и поэтому не будет подробно описываться в данной заявке.
Запросы оператора на рабочее торможение генерируются датчиками (не показаны), соединенными с устройством, отправляющим запрос на торможение, как, например, рычаг тормоза или педаль 230, 522 рабочего тормоза, как показано на чертежах. В зависимости от конструкции автопогрузчика педаль тормоза можно нажимать для запроса на торможение или отпускать для запроса на торможения. Для автопогрузчика 100 с противовесом с управлением в положении «сидя» педаль тормоза 230 нажимается для запроса на торможение. Для автопогрузчика 100 с противовесом с управлением для запроса на торможения, а в автопогрузчиках с управлением в положении «стоя», таких как погрузчик 100А, изображенный на фиг. 3, педаль тормоза удерживается нажатой для обеспечения нормального функционирования погрузчика и отпускается для запроса на торможение. Аналоговые транспортного средства, такие как потенциометры, и цифровые транспортного средства, такие как кодовые датчики, могут соединяться с педалью тормоза 230, 522 для создания сигнала, соответствующего или поддающегося обработке для обеспечения соответствия положению педали тормоза, что очевидно для специалистов в данной области техники.
Оператор погрузчика 100 может управлять скоростью погрузчика при помощи акселератора, которым можно управлять при помощи рук или ног оператора в зависимости от конструкции погрузчика. В погрузчике 100 используется ножной акселератор 244, а соответствующий потенциометр 526 тягового ускорителя показан на фиг. 5. Направление движения погрузчика 100 контролируется при помощи переключателя переднего хода и переключателя заднего хода, оба из которых обозначены позицией 528 на фиг. 5 и которыми можно управлять при помощи рычага 110 на рулевой колонке 112 или иным образом, например при помощи многофункционального контроллера, используемого на многих автопогрузчиках и изображенного в погрузчике 100А на фиг. 3. Датчик 523 угла поворота соединяется с третьим колесом 114 известным способом для определения угла поворота третьего колеса 114, управляемого вращением рулевого колеса 116 погрузчика 100 или рулевого рычага 116А погрузчика 100А. Для включения электропитания в целях функционирования погрузчика 100, 100А необходимо привести в действие тумблер или другой подходящий прибор, показанный как клавишный переключатель 520. Для получения дополнительной информации относительно описанной тормозной системы можно обратиться к патенту США №7681963, включенному в настоящую заявку во всей полноте в качестве ссылки.
На фиг. 4А и 4В показаны две схемы торможения, которые можно использовать на погрузочно-разгрузочных транспортных средствах. На фиг.4А показана схема, построенная на торможении колеса, содержащая двигатель 402, редуктор 404, механический тормоз 406 и колесо 408 транспортного средства. Когда тяговые усилия передаются на колесо 408 через редуктор 404 и механические связи 403А, 403В, 403С, тормозные усилия передаются через механическую связь 403С или, чаще всего, через тормоз 406 напрямую соединенный с колесом 408, так что для передачи тормозных усилий колесу 408 не используется никаких связей. На фиг. 4В показана схема торможения, построенная на торможении двигателя, которая также включает в себя тормоз 406, двигатель 402, редуктор 404 и механические связи 405А, 405В, 405С. Поэтому очевидно, что проблемы с трансмиссией могут привести к проблемам с тягой и, что вызывает еще большую озабоченность, с торможением. Следовательно, возможность определения механической целостности трансмиссии может помочь снизить риск непреднамеренного включения в работу транспортного средства, находящегося в неисправном состоянии.
Системы и способы диагностики и мониторинга в соответствии с принципами настоящей заявки, более подробно описанными в данном документе, могут применяться при любой схеме торможения в целях обеспечения такой возможности определения механической целостности трансмиссии.
Как описано выше, фиг. 5 представляет собой структурную схему уровней компонентов транспортного средства 10, как, например, автопогрузчиков 100, 100А, предусматривающую системы и способы диагностики и мониторинга в соответствии с принципами настоящей заявки. Модуль 502 регулирования тяги представляет собой микропроцессор или микроконтроллер либо другое аналогичное устройство, способное выполнять программные инструкции для обеспечения выполнения различных функций, более подробно описанных в настоящем документе. Дисплейный модуль 506 управления также представляет собой систему на базе микропроцессора для предоставления информации ведущему элементу транспортного средства 10 или получению входных данных от ведущего элемента, датчиков и т.п. Модуль регулирования тяги и дисплейный модуль управления могут обмениваться информацией в двух направлениях через канал 504 связи. В транспортном средстве 10 либо во взаимодействии с транспортным средством 10 могут иметься другие устройства на базе микропроцессора и вычислительные транспортные средства.
Транспортное средство 10 предусматривает различные средства управления, подразумевающие взаимодействие с оператором транспортного средства 10. Например, клавишный переключатель 520, датчик 518 присутствия оператора, педаль 522 тормоза, потенциометр 526 тягового ускорения и средства управления тягой, обеспечивающие движение вперед или назад при помощи переключателя переднего хода и переключателя 528заднего хода.
Для системы левых приводов 501А модуль 502 регулирования тяги подает сигнал 503А на левый тяговый двигатель 512А. Сигнал 503А регулирует частоту вращения, с которой вращается двигатель 512А, и определяет, приводит ли двигатель 512А в действие транспортное средство 10 или обеспечивает рекуперативное торможение. Механический тормоз 514А соединен с двигателем 512А для обеспечения тормозного усилия, противоположного направлению вращения двигателя 512А. Двигатель 512А соединяется с ведущим колесом 508А через систему механических связей 511А, включая редуктор 510А. Редуктор 510A может включать в себя вращающиеся зубчатые колеса, входящие в зацепление для обеспечения надлежащих уровней крутящего момента и частоты вращения для приведения в действие колеса 508А нужным образом. Связи 511А также могут включать в себя валы со шлицами и прочие элементы, позволяющими передавать усилие от двигателя 512А колесу 508А. Двигатель 512А соединяется с датчиком частоты вращения 516А, определяющим частоту вращения, на которой работает двигатель 512А. Например, датчик частоты вращения 516А может создавать импульсы, характерные для частоты вращения двигателя 512А и передавать импульсы модулю 502 регулирования тяги, который может считать импульсы с течением времени для определения частоты вращения двигателя, чтобы частоту вращения двигателя можно было использовать наряду с другой информацией для определения функционального состояния транспортного средства 10.
Система правого привода 501В функционирует аналогичным образом и включает в себя двигатель 512В, сигнал 503В регулирования, тормоз 514В, датчик частоты вращения 516В, механические связи 511В, включая редуктор 510В и ведущее колесо 508В.
На фиг. 6 показана модель взаимосвязи между частотой вращения или частотой вращения редуктора колеса 602 на внутренней стороне поворота и частотой вращения или частотой вращения редуктора колеса 606 на внешней стороне поворота и итоговой скоростью 604 погрузочно-разгрузочного транспортного средства в процессе поворотов с различными углами (по оси x) для определения электронного дифференциала. Модуль 502 регулирования тяги использует модель взаимосвязи, показанную на фиг. 6 для генерирования сигналов управления частотой вращения тягового двигателя для управления колесами, как если бы они были связаны друг с другом через механический дифференциал, таким образом формируя имитируемый или электронный дифференциал. Модуль 502 регулирования тяги также может сравнивать фактическую частоту вращения колеса на внутренней стороне поворота и колеса на наружной стороне поворота с расчетными значениями по модели взаимосвязи, показанной на фиг. 6, для определения наличия значительного отклонения частоты вращения колес от расчетных значений, приведенных на фиг. 6.
Фиг. 7 представляет собой блок-схему примера процесса мониторинга целостности трансмиссии погрузочно-разгрузочного транспортного средства в соответствии с принципами настоящей заявки. На этапе 702 оператор может включить погрузочно-разгрузочное транспортное средство для подачи питания на транспортное средство, включая бортовой контроллер (например, дисплейный модуль 506управления). Изначально предотвращается перемещение транспортного средства на этапе 704. Хотя транспортное средство не может перемещаться, дисплейный модуль 506 управления может информировать оператора о выполнении проверки стояночного тормоза; однако в рабочем варианте осуществления изобретения проверка успешно проводилась без уведомления оператора. Оператора можно уведомлять в целях выполнения им определенных функций, например, отцентрировать рулевой механизм транспортного средства и избегать нажатия на педаль тормоза. После основной центровки рулевого механизма и прекращения нажимания на педаль тормоза можно проводить проверку стояночного тормоза. В случае успешного проведения проверки стояночного тормоза на этапе 706 активируется перемещение транспортного средства на этапе 708 и транспортное средство перемещается в соответствии с командами оператора. В случае неуспешного проведения проверки на этапе 706 транспортное средство переводится в режим ограниченного перемещения на этапе 716, что может быть рекомендовано оператору, и может устанавливаться диагностический код, помогающий техническому специалисту быстро определить проблему.
По мере функционирования транспортного средства 10 модуль 502 регулирования тяги осуществляет мониторинг его работы посредством проведения проверки, называемой проверками редуктора в динамическом режиме. Если эксплуатационные параметры транспортного средства 10 успешно проходят проверку редуктора в динамическом режиме на этапе 710, то дальнейшая эксплуатация транспортного средства 10 разрешается. Однако при неудачном проведении проверки в динамическом режиме редуктора на этапе 710 функция перемещения транспортного средства отключается на этапе 712, и транспортное средство движется накатом до останова. Или же оператор может остановить транспортное средство посредством торможения противотоком или отправки запроса на торможение. Поскольку в некоторых случаях возможно ложное инициирование отказа в ходе проверки редуктора в динамическом режиме, проводится проверка редуктора в статическом режиме в целях подтверждения наличия или отсутствия отказа в ходе проверки редуктора в динамическом режиме. Таким образом, при успешном прохождении проверки редуктора в статическом режиме на этапе 714 снова активируется функция перемещения транспортного средства 10 на этапе 708. Однако в случае отказа и в ходе проверки редуктора в статическом режиме на этапе 714 транспортное средство 10 переводится в режим ограниченного перемещения, и может задаваться диагностический код для обозначения характера отказа.
Некоторые или все требования электрического транспортного средства в рабочем торможении можно удовлетворить при помощи рекуперативного торможения, при котором используется способность системы тяги к преобразованию кинетической энергии транспортного средства в электрическую энергию и последующее сохранение данной энергии в емкостном элементе, например аккумуляторе, что позволяет использовать ее позднее для работы транспортного средства.
При рекуперативном торможении возможно преобразование только кинетической энергии; поэтому необходимо также предусмотреть средства удержания транспортного средства в устойчивом состоянии без питания. Для соблюдения регламентирующих стандартов используются стояночный или механический тормоза (например, 514А, 514В) с контактной поверхностью торможения из фрикционного материала, способной обеспечивать необходимый крутящий момент для удержания загруженного транспортного средства на склоне. Стояночные тормоза также могут удовлетворять требования в аварийном или резервном рабочем торможении в случае недостаточности рекуперативного торможения при помощи системы тяги.
Стояночные тормоза разработаны как статический стояночный тормоз на весь срок службы со способностью поглощать ограниченное количество динамических аварийных остановов. В настоящее время не существует способов прямого измерения имеющегося крутящего момента стояночного тормоза или указания на необходимость обслуживания тормозов. Поэтому единственным доступным способом является применение тормозов на известной скорости и измерение тормозного пути. Очевидно, что каждая проверка приведет к прогрессирующему износу фрикционного материала и сокращению срока службы тормоза в зависимости от количества проверок, массы транспортного средства, скорости, на которой проводится проверка, и т.п.
В соответствии с принципами настоящей заявки проверка стояночного тормоза указывает на состояние стояночного тормоза(-ов) погрузочно-разгрузочного транспортного средства.
Фиг. 8 представляет собой блок-схему процесса для проверки функционального состояния стояночного тормоза погрузочно-разгрузочного транспортного средства в соответствии с принципами настоящей заявки.
При каждом инициирующем событии 802, до того как будет дано разрешение на перемещение транспортного средства, проводится проверка в статическом режиме стояночного тормоза в соответствии с процедурой, изображенной на фиг. 8. После получения первого запроса оператора на перемещение на этапе 804 контроллер, например модуль 502 регулирования тяги или дисплейный модуль 506 управления, инициирует проверку. На этапе 806 приводится в действие каждый механический тормоз, связанный с тяговым двигателем или с ведущим колесом. После срабатывания механических тормозов осуществляется индивидуальный контроль тяговых двигателей, чтобы каждый двигатель был обеспечен достаточной мощностью для создания достаточного крутящего момента, вызывающего вращение двигателя в случае ухудшения функционального состояния тормоза для соответствующего ведущего колеса. Величина крутящего момента, сообщаемого тяговым двигателем, определяется на основании типа погрузочно-разгрузочного транспортного средства и может отличаться в зависимости от номинальных характеристик массы и нагрузки для каждого типа транспортного средства. Например, величина крутящего момента двигателя может соотноситься с величиной тормозного момента, необходимой для удержания транспортного средства при максимальной нагрузке на заданном уклоне. Задаваемая в ходе проверки величина крутящего момента для каждого двигателя, сообщаемая его ведущему колесу и, соответственно, его механическому тормозу, может храниться в памяти, доступной для контроллера (например, модуля 502 регулирования тяги или дисплейного модуля 506 управления). Крутящий момент прикладывается согласно запросу оператором на перемещение, так что любое движение транспортного средства вследствие недостаточного механического торможения не будет неожиданным для оператора.
Полезно провести проверку всех тяговых двигателей и их соответствующих стояночных тормозов, имеющихся на транспортном средстве. Однако проверка двигателей по отдельности, одного за другим, позволит легко определить, у какого именно стояночного тормоза(ов) ухудшились эксплуатационные характеристики. Если приложение определенного крутящего момента приводит к движению тягового двигателя, проверка стояночного тормоза считается неудачной. На этапе 810 определяется вращение тягового двигателя и фиксируется факт неудачного проведения проверки. Затем проверка повторяется на этапе 808 как способ подтверждения произошедшего отказа. Если на этапе 810 определяется, что в ходе проверки стояночного тормоза дважды имел место отказ, то на этапе 814 транспортное средство переводится в режим ограниченного перемещения, генерируется код отказа/диагностический код, который сохраняется для последующего устранения неисправностей. Если на этапе 810 определяется, что проверка стояночного тормоза была успешной при первой или повторной проверке, разрешается перемещение транспортного средства 10 на этапе 812. Вращение тягового двигателя можно определить, например, при помощи одного из описанных выше датчиков частоты вращения с обратной связью 516А, 516В. Кроме того, вращение колес 508А, 508В можно определить при помощи других датчиков, имеющихся на устройстве, в целях определения результатов проверки стояночного тормоза. Отмечается, что возможно незначительное перемещение, возникающее в связи с вхождением в зацепление друг с другом механических связей трансмиссии. Таким образом, можно задать минимальное пороговое значение, чтобы отказ в ходе проверки был возможен только при частоте вращения, превышающей пороговую.
Результаты проверки могут быть неясными, если угол поворота транспортного средства составляет более примерно 20°, считая от центра, или если оператор направляет запрос на торможение. При обнаружении любого из данных состояний транспортного средства можно использовать дисплейный модуль 506 управления для напоминания оператору о необходимости устранения данных состояний транспортного средства до выполнения (или повторения) проверки на этапе 808. В режиме ограниченного перемещения транспортное средство можно транспортировать на участок ремонта (обслуживания) или в новое место в здании. В новом месте результаты проверки могут отличаться, поскольку уклон или состояние пола также может служить причиной ложного отказа.
Возвращаясь вкратце к блок-схеме по фиг. 7, при успешном прохождении проверки стояночного тормоза устройству разрешается перемещаться и в процессе работы периодически подвергаться проверке редуктора в динамическом режиме в соответствии с принципами настоящей заявки в целях обнаружения отказов или прочих ухудшенных состояний трансмиссии(й) транспортного средства.
Как упоминалось выше, в динамическом режиме функционирования было бы полезно иметь возможность дедуктивного определения состояния трансмиссии погрузочно-разгрузочного транспортного средства промышленного назначения, а также определять выход из зацепления любых элементов трансмиссии транспортного средства (например, редуктора, колеса, фрикционного тормоза, ведущего вала, шлицев и т.д.) между тяговым двигателем и ведущими колесами. Однако ложное определение отказа при фактическом его отсутствии оказывает отрицательное влияние на эксплуатационную пригодность транспортного средства и вызывает потерю производительности и прочие проблемы. Таким образом, в любых проверках в динамическом режиме необходимо различать фактическую потерю функциональности, вызванную механическим отказом, и аномальное внешнее событие, как, например, отрыв колес от земли или пробуксовка колес в результате езды по льду или иной скользкой поверхности. В случае поломки транспортное средство должно своевременно оповещать оператора, двигаться накатом до снижения скорости до нуля (или же оператор может остановить транспортное средство торможением противотоком или направлением запроса на торможение) и выполнять дополнительные, более доказательные проверки для дальнейшего определения истинного состояния эксплуатационной готовности транспортного средства. На фиг.9 показан концептуальный разрез исходных данных и результатов системы и способа проверки в динамическом режиме в соответствии с принципами настоящей заявки.
Модуль 502 регулирования тяги имеет ряд входных данных, информации и измеренных данных, относящихся к эксплуатационным характеристикам транспортного средства. Например, модель с частотой вращения как функцией угла поворота, показанная на фиг.6, предоставляет информацию относительно того, как соответствующие частоты вращения колес на внутренней и внешней стороне поворота должны соотноситься друг с другом, на основании текущего угла поворота и режима перемещения. Доступно значение, означающее ток 904, потребляемый каждым тяговым двигателем (например, 512А, 512В), равно как и частота вращения 906 тягового двигателя и угол поворота 908 транспортного средства. Некоторые транспортные средства позволяют задать предельную скорость 910, чтобы даже в случае, если транспортное средство способно перемещаться со скоростью, превышающей предельную скорость 910, оно не может этого сделать. Кроме того, модуль регулирования тяги может быть соединен с каналом 504 связи, как правило, представляющим собой шину CAN транспортного средства, чтобы можно было также определять рабочее состояние 912 различных элементов транспортного средства. На основании различных сочетаний этих входных данных модуль 502 регулирования тяги может определять, произошел ли тот или иной отказ или возникла ли поломка трансмиссии. Такие поломки или отказы могут включать в себя, например сработанный шлиц, сломанную/сработанную ступицу, сломанную ось, функциональное состояние редуктора, функциональное состояние двигателя, функциональное состояние стояночного тормоза, пробуксовку колес, отрыв колес и вышедшие из зацепления соединительные валы/шлицы/муфты.
Фиг. 10 представляет собой подробную блок-схему одного примера процесса для реализации системы и способа проверки в динамическом режиме в соответствии с принципами настоящей заявки. Прямоугольники на фиг. 10 представляют разные состояния транспортного средства на основании измеренных параметров транспортного средства и/или расчетных значений параметров транспортного средства, возникновение которых позволяет сделать вывод о том, что произошел динамический отказ или поломка трансмиссии. Преимущества данного типа эвристического подхода к обнаружению проблем заключаются в том, что количество датчиков, измерительных приборов, преобразователей и т.д. сведено к минимуму, и отсутствует необходимость в относительно сложных вычислительных ресурсах или ресурсах высокого уровня. Наблюдаемые состояния по фиг. 10 показаны последовательно, но это сделано просто в целях обеспечения базы для обсуждения различных выводов. Каждое из данных наблюдаемых состояний можно определить и оценить параллельно или в другом порядке, не отклоняясь от заданного объема основного содержания настоящей заявки.
Первое наблюдаемое состояние 1002 - это вращается ли правое колесо 508В при правом повороте быстрее, чем левое колесо 508А. При поворотах направо частота вращения правого колеса должна быть ниже частоты вращения левого колеса, поскольку правое колесо является колесом на внутренней стороне поворота. Таким образом, наблюдение более быстрого вращения правого колеса по сравнению с левым колесом при повороте направо вызывает озабоченность относительно возможной поломки в системе механических связей 511В, включая редуктор 510В, образующий систему правого привода 501В. Для предотвращения некоторых ложных показателей отказа можно игнорировать результаты данной проверки, если угол поворота превышает примерно 85° или если частота вращения любого из тяговых двигателей меньше примерно 600 мин-1. Хотя частоту вращения колес можно измерить напрямую, можно также использовать частоту вращения редукторов, а также частоту вращения тяговых двигателей. В соответствии с рабочим вариантом осуществления системы мониторинга по настоящей заявке использовалась частота вращения тяговых двигателей 512А, 512В, определяемая их соответствующими датчиками частоты вращения с обратной связью 516А, 516В, а не напрямую измеряемая частота вращения редуктора или частота вращения колес.
Вторым наблюдаемым состоянием 1004 по фиг. 10 является зеркальное отражение состояния 1002, в том смысле, что подразумевается поворот налево, и следовательно, определяется, превышает ли частота вращения левого колеса частоту вращения правого колеса.
Еще одним состоянием 1006, которое может привести к заключению о наличии динамической проблемы с трансмиссией, является то, что разница между соответствующими крутящими моментами двигателей, представленными в виде токов управления в рабочем варианте осуществления изобретения в соответствии с основными принципами настоящей заявки к правому тяговому двигателю 512В и левому тяговому двигателю 512А больше определенного порогового значения (например, 120А), когда транспортное средство 10 перемещается в приблизительно прямом направлении. Если транспортное средство 10 выполняет поворот с углом поворота более приблизительно 10°, токи к тяговым двигателям отличаются, и сравнение токов может не дать точных результатов при таких углах поворота. Однако, когда транспортное средство перемещается по относительно прямой траектории, соответствующие крутящие моменты тяговых двигателей, а следовательно и токи, должны быть близкими друг другу при условии надлежащего функционирования трансмиссии с каждой стороны. Кроме того, оценка состояния 1006 может также иметь временную компоненту для игнорирования временных пиков и неконтролируемых колебаний. Например, может понадобиться, чтобы разница между токами двух тяговых двигателей была больше определенного порога, по меньшей мере, в течение заданного периода времени (например, 120А в течение 0,5 с), до того как потенциальная проблема с трансмиссией будет считаться обнаруженной. Кроме того, поскольку удовлетворяющие критериям разности токов тяговых двигателей могут возникать в отсутствие проблем с трансмиссией при частоте вращения любого из тяговых двигателей менее 600 мин-1, такие разности токов при частоте вращения одного или обоих тяговых двигателей менее 600 мин-1 могут игнорироваться при желании.
Состояние 1008 предполагает сравнение фактической частоты вращения колеса на внутренней стороне поворота с расчетной частотой вращения редуктора, определяемой из электронного дифференциала по фиг. 6. В частности, частота вращения внешнего колеса и угол поворота могут использоваться в модели, предусмотренной на фиг. 6, для определения расчетной частоты вращения колеса на внутренней стороне поворота. Если наблюдаемая частота вращения колеса на внутренней стороне поворота выше частоты вращения, рассчитываемой по модели на фиг. 6, можно сделать вывод о наличии проблемы с трансмиссией на внутренней стороне поворота. Во избежание появления ложных показателей отказа случаи возникновения данного состояния при частоте вращения того или иного тягового двигателя менее 600 мин-1 можно игнорировать при желании.
Состояние 1010 определяет, превышает ли частота вращения того или иного редуктора заданный пользователем предел частоты вращения. Во избежание получения ложно-положительных результатов проверки может потребоваться, чтобы наблюдаемая частота вращения редуктора превышала допустимую частоту вращения примерно на 5% до того, как будет сделано заключение об отказе. В отсутствие заданного пользователем предела частоты вращения устройство может иметь предел частоты вращения по умолчанию, который также можно использовать для тестирования данного состояния.
Другое наблюдаемое состояние 1012, которое может указывать на динамический отказ редуктора, возникает, если частота вращения правого редуктора равна нулю, а частота вращения левого редуктора выше нуля в течение заданного периода времени (например, 1,5 с). Поскольку данное состояние может периодически возникать в ходе определенных операций по выполнению поворотов, результаты данной проверки можно игнорировать или данную проверку можно вообще не проводить, если угол поворота составляет от примерно +65° до 75° или от примерно -65° до примерно -75°. Наблюдение данного состояния предполагает наличие отказа трансмиссии в системе левого привода 501 А. Состояние, представленное в прямоугольнике 1014, является зеркальным отражением состояния 1012, но при этом идут наблюдения за тем, равна ли частота вращения левого редуктора нулю при частоте вращения правого редуктора выше нуля, в целях определения вероятности существования проблемы в системе правого привода 501В. В каждой из проверок диапазон исключенных углов поворота одинаков во избежание получения ложных признаков отказа.
Последнее состояние 1016 определяет, превышает ли ускорение того или иного редуктора заданный порог (например, 7500 мин-1/с). Нехарактерно высокая величина ускорения может означать, что тяговый двигатель каким-то образом отсоединяется от других компонентов трансмиссии, и поэтому можно делать вывод о наличии отказа.
Если не наблюдаются никакие из состояний, предусмотренных фиг. 10, то транспортное средство остается в режиме хода, см. этап 708, фиг. 7. Если же делается вывод о наличии отказа по одному из наблюдаемых состояний, то транспортное средство можно перевести в режим ограниченного перемещения, чтобы можно было провести одну или более проверок в статическом режиме для подтверждения или опровержения обнаруженного динамического отказа редуктора.
Многие «нормальные» условия эксплуатации для погрузочно-разгрузочных транспортных средств промышленного назначения могут выглядеть как одно из состояний, предусмотренных фиг. 10, что подразумевает отсоединение элемента в той или иной трансмиссии в системе сдвоенного привода. Например, перемещение по сырому или обледеневшему покрытию может удовлетворять одному или более из состояний, отслеживаемых на фиг. 10. Случаи ложных состояний отказа определялись бы как отказы, приводя к отключению транспортного средства и вызывая недовольство оператора. Для сокращения количества данных случаев после обнаружения возможного отказа трансмиссии можно провести еще одну проверку для подтверждения отказа или подвергания сомнению результатов неудачной динамической проверки.
Например, если транспортное средство не проходит проверку в динамическом режиме редуктора, выводится сообщение об ошибке и осуществляется управление трансмиссией транспортного средства таким образом, чтобы транспортное средство накатом двигалось до нулевой скорости. Или же оператор может остановить транспортное средство посредством торможения противотоком или направления команды о торможении. Хотя некоторые диагностические коды можно удалить посредством отключения и последующего включения питания транспортного средства 10, коды динамического отказа вследствие разъединения можно удалить только при условии успешного прохождения проверки редуктора в статическом режиме.
В соответствии с принципами настоящей заявки проверка в статическом режиме, как показано на блок-схеме на фиг. 11, проводится по отдельности на каждом из различных тяговых двигателей. В тормозных системах, аналогичных описанным выше со ссылкой на патент США №7681963 можно сначала провести проверку с той стороны погрузчика, где имеется меньшее механическое тормозное усилие (например, 1/3 от общего тормозного усилия). Поскольку данная проверка обеспечивает надежные результаты при угле поворота менее примерно 20°, оператор может получить инструкцию о выравнивании угла поворота до приемлемого уровня до или в ходе проведения проверки.
На этапе 1102 на один из тяговых двигателей (например, 512А, 512В) подается питание в целях обеспечения достаточного крутящего момента, чтобы заставить двигатель вращаться в случае его отсоединения от ведущего колеса (например, 508А, 508В). Для данного тягового двигателя отпускается соответствующий стояночный тормоз (например, 514А, 514В), чтобы не мешать вращению двигателя. При этом стояночный тормоз для другой стороны погрузчика остается в зацеплении.
Если возбуждаемый тяговый двигатель соединяется со своим ведущим колесом, тяговый двигатель не будет вращаться, поскольку стояночный тормоз с другой стороны препятствует перемещению транспортного средства. Таким образом, если фактически не произошло никакого отказа вследствие механического разъединения, то определенная частота вращения тягового двигателя будет равняться нулю. Если же на этапе 1104 определяется, что частота вращения тягового двигателя выше нуля, то это означает, что тяговый двигатель отсоединился от своего ведущего колеса, поскольку тяговый двигатель вращается, а транспортное средство не двигается. Затем, на этапе 1106, повторяются процедуры проверки, предусмотренные этапами 1102 и 1104, для другого тягового двигателя. На этапе 1108, если оба тяговых двигателя проходят проверку редуктора в статическом режиме, код динамического отказа редуктора удаляется, и транспортное средство 10 снова готово к эксплуатации. Однако в случае неуспешных проверок редуктора в статическом режиме задается соответствующий код, и транспортное средство остается в режиме ограниченного перемещения.
Как кратко упоминалось в отношении проверки стояночного тормоза, связи и валы тяговых двигателей могут обеспечивать ограниченное перемещение, поскольку разные компоненты зацепляются друг с другом. Так, незначительное движение можно наблюдать, если тяговый двигатель соединяется с его ведущим колесом. Соответственно, можно выбирать уровень и количество статистических данных, собранных в отношении вращения тягового двигателя, для уменьшения ложных отказов. Кроме того, можно выбирать значение подаваемого тока для быстрого увеличения крутящего момента (например, создавать нужный крутящий момент менее, чем за 15 мс) для более легкого определения движения, если бы оно произошло.
Несмотря на то, что в вышеизложенном описании сущности изобретения рассматриваются иллюстрируемые аспекты и/или варианты осуществления изобретения, следует отметить, что возможны различные изменения в настоящем документе без отклонения от объема описанных аспектов и/или вариантов осуществления изобретения, как определено в прилагаемой формуле изобретения. Кроме того, хотя элементы описанных аспектов и/или вариантов осуществления изобретения могут описываться или заявляться в единственном числе, оно подразумевает и множественное за исключением случаев положительно выраженного ограничения до единственного числа. Кроме того, весь или какая-то часть аспекта и/или варианта осуществления настоящего изобретения может использоваться со всем или какой-то частью другого аспекта и/или варианта осуществления изобретения, если не указано иное.
Реферат
Изобретение относится к погрузочно-разгрузочным транспортным средствам. Способ динамического мониторинга одной или более трансмиссий транспортного средства промышленного назначения включает в себя определение факта отказа трансмиссии с использованием эксплуатационных параметров, наблюдаемых в процессе работы транспортного средства. В случае обнаружения отказа трансмиссии проводят проверку в статическом режиме на транспортном средстве для подтверждения динамического отказа трансмиссии. Определяют на основании результатов проверки в статическом режиме факт наличия или отсутствия отказа во время проверки в статическом режиме. Ограничивают управление транспортным средством в случае отказа во время проверки в статическом режиме. Транспортное средство промышленного назначения содержит приводной узел, ведущее колесо, тяговый двигатель, трансмиссию, механический тормоз колеса и модуль контроллера для реализации вышеуказанного способа. В других примерах способа проверку наличия отказа трансмиссии проводят в отношении редуктора и тяговых двигателей. Повышается удобство и точность обнаружений отказов. 5 н. и 31 з.п. ф-лы, 11 ил.
Формула
наблюдение за множеством эксплуатационных параметров транспортного средства промышленного назначения в процессе его работы,
определение факта отказа трансмиссии с использованием эксплуатационных параметров,
проведение в случае обнаружения отказа трансмиссии проверки в статическом режиме на устройстве промышленного назначения для подтверждения динамического отказа трансмиссии при проведении проверки в статическом режиме на неподвижном устройстве промышленного назначения,
определение на основании результатов проверки в статическом режиме факта наличия или отсутствия отказа во время проверки в статическом режиме, и
ограничение возможностей управления перемещением транспортного средства промышленного назначения в случае отказа во время проверки в статическом режиме.
определении расчетной частоты вращения тягового двигателя на внутренней стороне поворота на основании определенного угла поворота и определенной частоты вращения тягового двигателя на наружной стороне поворота, и
определении того, превышает ли фактическая частота вращения тягового двигателя на внутренней стороне поворота расчетную частоту вращения.
определении предела частоты вращения для транспортного средства промышленного назначения, и
определении того, превышает ли соответствующая частота вращения правого тягового двигателя или левого тягового двигателя предел частоты вращения.
приводной узел,
по меньшей мере одно ведущее колесо,
по меньшей мере один тяговый двигатель,
по меньшей мере одну трансмиссию между по меньшей мере одним ведущим колесом и по меньшей мере одним тяговым двигателем,
по меньшей мере один механический тормоз для передачи тормозного усилия по меньшей мере на одно колесо, и
модуль контроллера для выполнения программных инструкций по
наблюдению за множеством эксплуатационных параметров транспортного средства промышленного назначения в процессе его работы,
определению факта отказа трансмиссии с использованием эксплуатационных параметров,
проведению в случае обнаружения отказа трансмиссии проверки в статическом режиме на транспортном средстве промышленного назначения для подтверждения динамического отказа трансмиссии при проведении проверки в статическом режиме на неподвижном транспортном средстве промышленного назначения,
определению на основании результатов проверки в статическом режиме факта наличия или отсутствия отказа во время проверки в статическом режиме, и
ограничению возможностей управления перемещением транспортного средства промышленного назначения в случае отказа во время проверки в статическом режиме.
определении расчетной частоты вращения тягового двигателя на внутренней стороне поворота на основании определенного угла поворота и определенной частоты вращения тягового двигателя на внешней стороне поворота, и
определении того, превышает ли фактическая частота вращения тягового двигателя на внутренней стороне поворота расчетную частоту вращения.
определении предела частоты вращения на транспортном средстве промышленного назначения, и
определении того, превышает ли частота вращения по меньшей мере одного тягового двигателя предел частоты вращения.
выведение из зацепления первого фрикционного тормоза, соединенного с первым тяговым двигателем,
введение в зацепление второго фрикционного тормоза, соединенного со вторым тяговым двигателем,
включение питания первого тягового двигателя для создания первого крутящего момента с первым заданным значением, где первого крутящего момента достаточно для вращения первого тягового двигателя, если первый тяговый двигатель отсоединяется от первого редуктора,
определение того, вращается ли первый тяговый двигатель в результате действия первого крутящего момента, и
определение факта отказа в ходе проверки в статическом режиме при вращении первого тягового двигателя.
выведение из зацепления второго фрикционного тормоза,
введение в зацепление первого фрикционного тормоза,
включение питания второго тягового двигателя для создания второго крутящего момента со вторым заданным значением, где второго крутящего момента достаточно для вращения второго тягового двигателя, если второй тяговый двигатель отсоединяется от второго редуктора.
наблюдение за множеством эксплуатационных параметров транспортного средства промышленного назначения в процессе его работы, определение факта отказа в ходе проверки редуктора в динамическом режиме на основании одного или более из множества эксплуатационных параметров,
проведение статической проверки на устройстве промышленного назначения для подтверждения отказа в ходе проверки редуктора в динамическом режиме при проведении проверки в статическом режиме на неподвижном транспортном средстве промышленного назначения,
определение на основании результатов проверки в статическом режиме факта наличия или отсутствия отказа во время проверки в статическом режиме, и
ограничение возможностей управления перемещением транспортного средства промышленного назначения в случае отказа во время проверки в статическом режиме.
определение расчетной частоты вращения тягового двигателя на внутренней стороне поворота на основании определенного угла поворота и определенной частоты вращения тягового двигателя на внешней стороне поворота, и
определение того, превышает ли фактическая частота вращения тягового двигателя на внутренней стороне поворота расчетную частоту вращения.
определение предела частоты вращения для транспортного средства промышленного назначения, и
определение того, превышает ли соответствующая частота вращения правого тягового двигателя или левого тягового двигателя предел частоты вращения.
выведение из зацепления первого фрикционного тормоза, соединенного с первым тяговым двигателем,
введение в зацепление второго фрикционного тормоза, соединенного со вторым тяговым двигателем,
включение питания первого тягового двигателя для создания первого крутящего момента с первым заданным значением, где первого крутящего момента достаточно для вращения первого тягового двигателя, если первый тяговый двигатель отсоединяется от первого редуктора,
определение того, вращается ли первый тяговый двигатель в результате действия первого крутящего момента, и
определение факта отказа в ходе проверки в статическом режиме при вращении первого тягового двигателя.
выведение из зацепления второго фрикционного тормоза,
введение в зацепление первого фрикционного тормоза,
включение питания второго тягового двигателя для создания второго крутящего момента со вторым заданным значением, где второго крутящего момента достаточно для вращения второго тягового двигателя, если второй тяговый двигатель отсоединяется от второго редуктора,
определение того, вращается ли второй тяговый двигатель в результате действия второго крутящего момента, и
определение факта отказа в ходе проверки в статическом режиме при вращении второго тягового двигателя.
наблюдение за множеством эксплуатационных параметров левого тягового двигателя и правого тягового двигателя транспортного средства промышленного назначения в процессе его работы, и
определение факта отказа трансмиссии с использованием эксплуатационных параметров.
проведение в случае обнаружения отказа трансмиссии проверки в статическом режиме на транспортном средстве промышленного назначения для подтверждения динамического отказа трансмиссии при проведении проверки в статическом режиме на неподвижном транспортном средстве промышленного назначения,
определение на основании результатов проверки в статическом режиме факта наличия или отсутствия отказа во время проверки в статическом режиме, и
ограничение возможностей управления перемещением транспортного средства промышленного назначения в случае отказа во время проверки в статическом режиме.
наблюдение за множеством эксплуатационных параметров транспортного средства промышленного назначения в процессе его работы,
определение факта отказа трансмиссии с использованием эксплуатационных параметров, причем определение факта отказа трансмиссии включает в себя
определение расчетной частоты вращения тягового двигателя на внутренней стороне поворота на основании определенного угла поворота и определенной частоты вращения тягового двигателя на наружной стороне поворота, и
определение того, превышает ли фактическая частота вращения тягового двигателя на внутренней стороне поворота расчетную частоту вращения.
Комментарии